Область техники, к которой относится изобретение
Настоящее изобретение относится к технической области компьютеров, в частности, к устройству, способу и аппаратному устройству для измерения размеров предмета.
Уровень техники
В настоящее время общим способом измерения размеров товаров в случае необходимости, когда они помещаются на хранение, является ручное измерение, при этом эффективность и точность такого способа являются низкими. Точность ручного измерения еще ниже особенно для товаров, имеющих неправильную форму.
Сущность изобретения
Поэтому настоящее изобретение обеспечивает устройство, способ и аппаратное устройство для измерения размеров предмета, которые помогают эффективно и точно рассчитать размер предмета.
Для реализации вышеуказанной цели согласно одному аспекту настоящего изобретения выполнено устройство для измерения размеров предмета.
Согласно настоящему изобретению устройство для измерения размеров предмета содержит: датчик глубины, кронштейн датчика, средство обеспечения коррекции, платформу для размещения предмета и компьютер, в котором средство обеспечения коррекции используется для обеспечения коррекции плоскости датчика глубины и включает в себя сетки или отпечатки, имеющие текстуры черно-белой шахматной доски, а также прозрачную плоскую пластину, причем сетки или отпечатки накладываются на платформу для размещения предмета, и прозрачная плоская пластина прижимается к сеткам или отпечаткам; датчик глубины расположен на кронштейне датчика и находится в пространстве над платформой для размещения предмета; компьютер соединен с датчиком глубины.
В качестве альтернативы, кронштейн датчика состоит из вертикальной планки и горизонтальной планки, которые соединены друг с другом и образуют прямой угол; датчик глубины фиксируется вблизи свободного конца горизонтальной планки; компьютер закреплен на вертикальной планке; и вертикальная планка закреплена на платформе для размещения предмета.
В качестве альтернативы, платформа для размещения предмета имеет четыре ножки, каждая из которых имеет концевой участок, на котором установлено колесо; и система дополнительно содержит ручку, присоединенную к платформе для размещения предмета.
В качестве альтернативы, датчик глубины подключен к компьютеру через USB-интерфейс; и переносной сканер штрих-кода подключен к компьютеру через USB-интерфейс.
Согласно другому аспекту настоящего изобретения создан способ измерения размеров предмета.
Способ измерения размеров предмета согласно настоящему изобретению применяется в устройстве для измерения размеров предмета согласно настоящему изобретению. Способ содержит: захват, датчиком глубины, картинки средства обеспечения коррекции и измерение пространственных координат верхней поверхности средства обеспечения коррекции; определение, компьютером, расстояния от средства обеспечения коррекции до датчика глубины на основании картинки и пространственных координат; после того, как измеряемый предмет размещен на средстве обеспечения коррекции, отправку, датчиком глубины, обнаруженной карты глубин в компьютер; вычисление, компьютером, высоты H измеряемого предмета, согласно H=D-d-h, где D - расстояние от средства обеспечения коррекции до датчика глубины, d - минимальное значение глубины в скорректированной карте глубин, и h - толщина прозрачной плоской пластины; и определение, компьютером, ограничивающего прямоугольника пикселей, каждый из которых имеет глубину больше d и меньше D-h в карте значений глубины, длины и ширины ограничивающего прямоугольника, используемых в качестве длины и ширины измеряемого предмета.
В качестве альтернативы, этап определения расстояния от средства обеспечения коррекции до датчика глубины включает в себя: получение расстояния от средства обеспечения коррекции до датчика глубины путем решения задачи PnP на основе координат заданных маркированных точек на картинке и пространственных координат.
В качестве альтернативы, способ дополнительно содержит: вывод компьютером высоты, длины и ширины измеряемого предмета, в порядке возрастания.
Согласно другому аспекту настоящего изобретения создано аппаратное устройство для измерения размеров предмета.
Аппаратное устройство для измерения размеров предмета согласно настоящему изобретению используется для осуществления способа измерения размеров предмета согласно настоящему изобретению. Аппаратное устройство содержит: первый модуль приема для приема картинки средства обеспечения коррекции, захваченного датчиком глубины, и пространственных координат верхней поверхности средства обеспечения коррекции, измеренных датчиком глубины; первый модуль вычисления для определения расстояния от средства обеспечения коррекции до датчика глубины на основании картинки и пространственных координат; второй модуль приема для приема карты глубин, обнаруженной датчиком глубины после размещения измеряемого предмета, на средстве обеспечения коррекции; второй модуль вычисления для вычисления высоты H измеряемого предмета, согласно H=D-d-h, где D - расстояние от средства обеспечения коррекции до датчика глубины, d - минимальное значение глубины в скорректированной карте глубин, и h - толщина прозрачной плоской пластины; третий модуль вычисления для определения ограничивающего прямоугольника пикселей, каждый из которых имеет глубину больше d и меньше D-h в карте значений глубины, длины и ширины ограничивающего прямоугольника, используемых в качестве длины и ширины измеряемого предмета.
В качестве альтернативы, первый модуль вычисления дополнительно используется для получения расстояния от средства обеспечения коррекции до датчика глубины путем решения задачи PnP на основе координат заданных маркированных точек на картинке и пространственных координат.
В качестве альтернативы, аппаратное устройство дополнительно содержит модуль вывода для вывода высоты, длины и ширины измеряемого предмета, в порядке возрастания.
Согласно техническому решению настоящего изобретения высоту, а также длину и ширину измеряемого предмета, можно получить путем размещения измеряемого предмета под датчиком глубины для измерения глубины перед обработкой, выполняемой компьютером. Такой способ не требует от человека проведения ручного измерения, повышает эффективность и является более точным, чем ручное измерение.
Краткое описание чертежей
Чертежи служат для лучшего понимания настоящего изобретения, но не налагают никаких ненадлежащих ограничений на настоящее изобретение.
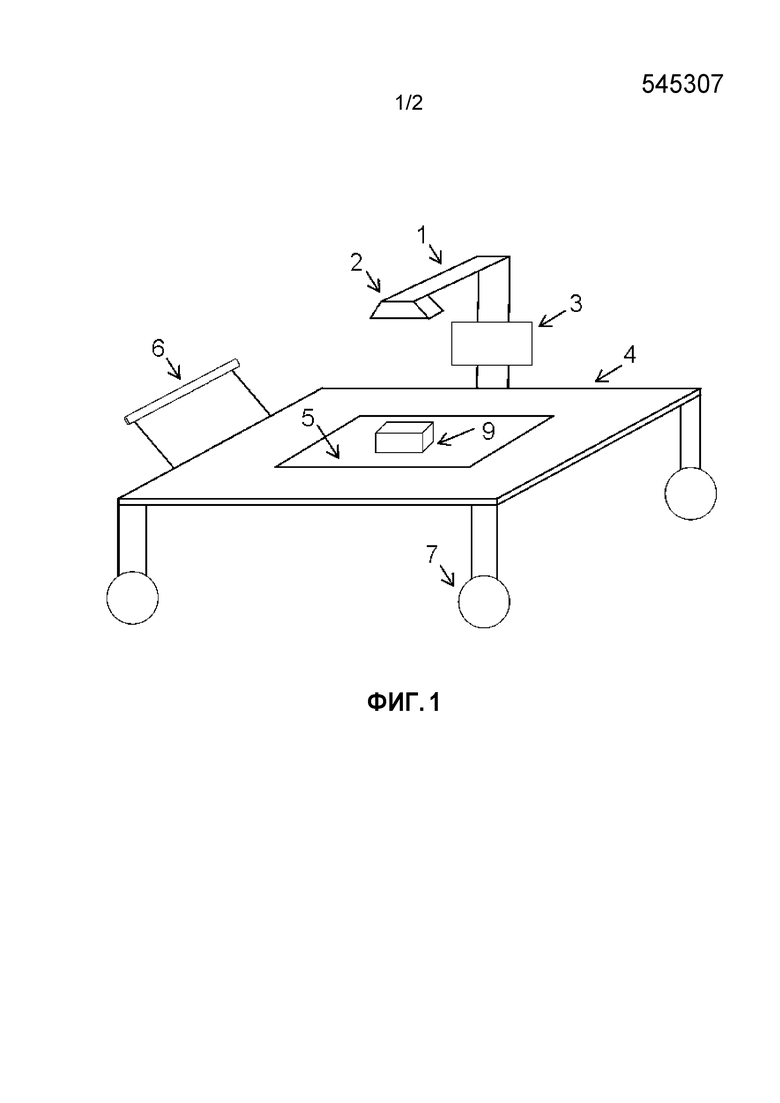
На фиг.1 показана схема, иллюстрирующая устройство для измерения размеров предмета согласно варианту осуществления настоящего изобретения;
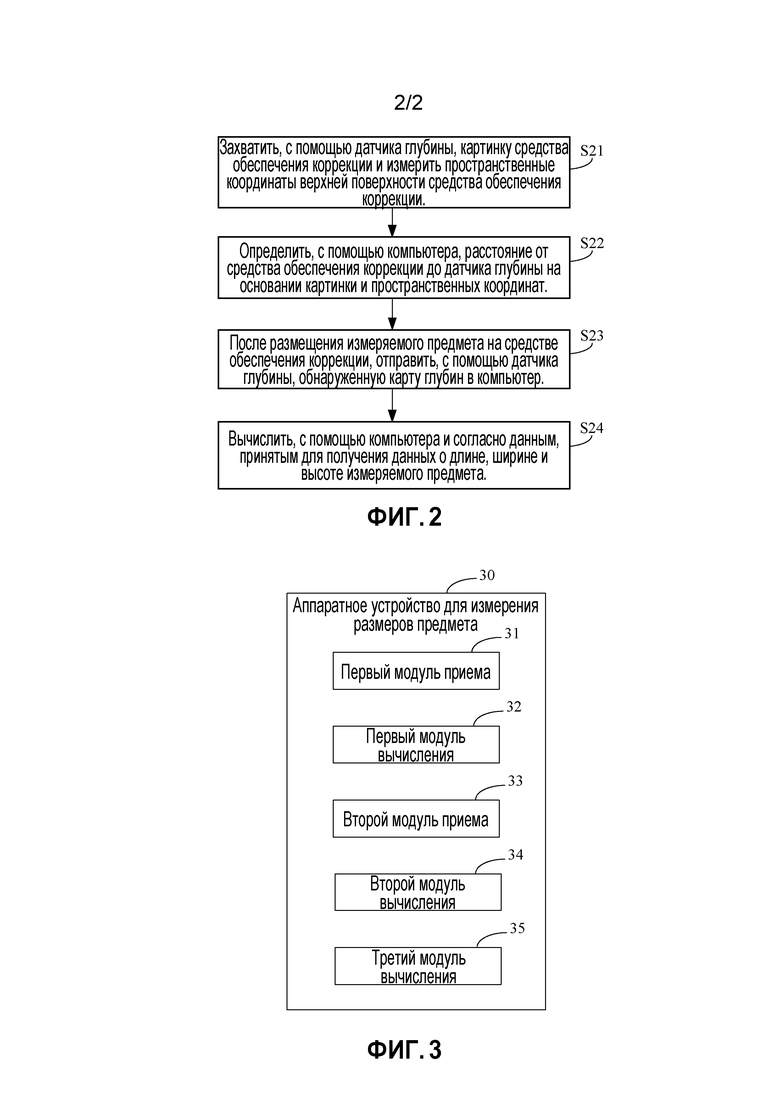
на фиг.2 показана схема, иллюстрирующая основные этапы способа измерения размеров предмета согласно варианту осуществления настоящего изобретения; и
на фиг.3 показана схема, иллюстрирующая основные модули аппаратного устройства для измерения размеров предмета согласно варианту осуществления настоящего изобретения.
Подробное описание изобретения
Ниже поясняется иллюстративный вариант осуществления настоящего изобретения со ссылкой на чертежи, включая различные детали в варианте осуществления настоящего изобретения, чтобы облегчить понимание, и их следует рассматривать только как примерные. Поэтому специалисты в данной области техники должны понимать, что: различные варианты и модификации могут быть сделаны в варианте осуществления, проиллюстрированном здесь, без отклонения от объема и сущности настоящего изобретения. Аналогичным образом, ради четкости и краткости изложения описание общих функций и конструкций опущено в последующем описании.
Устройство для измерения размеров предмета согласно варианту осуществления настоящего изобретения в основном содержит: датчик глубины, кронштейн датчика, платформу для размещения предмета и компьютер, в котором датчик глубины размещен на кронштейне датчика и расположен в пространстве над платформой для размещения предмета, и компьютер соединен с датчиком глубины. Предпочтительная конструкция устройства проиллюстрирована на фиг.1, на которой показана схема, иллюстрирующая устройство для измерения размеров предмета согласно варианту осуществления настоящего изобретения. Как показано на фиг.1, устройство для измерения размеров предмета в основном содержит кронштейн 1 датчика, датчик 2 глубины, компьютер 3, платформу 4 для размещения предмета, средство 5 обеспечения коррекции, ручку 6 ручной тележки, колесо 7 (имеется четыре колеса, и на фигуре можно увидеть под углом зрения три колеса). Колесо, которое устанавливается на одном конце ножки платформы для размещения предмета вместе с ручкой 6 ручной тележки, делает устройство имеющим функциональные возможности загрузки и транспортировки тележки. Кронштейн 1 датчика состоит из вертикальной планки и горизонтальной планки, которые соединены друг с другом, и образуют прямой угол и соединены с платформой 4 для размещения предмета. Датчик 2 глубины, показанный на фигуре, расположен вблизи свободного конца горизонтальной планки. Основываясь на принципе измерения инфракрасного излучения, датчик глубины получает расстояние от точки до плоскости, где находится датчик, путем захвата отражения от этой точки инфракрасных лучей, находящихся в поле зрения. Датчик глубины излучает множество параллельных инфракрасных лучей, которые перпендикулярны плоскости датчика глубины. Компьютер 3 закреплен на вертикальной планке и расположен с одной стороны вертикальной планки по направлению к платформе 4 для размещения предмета. В качестве альтернативы, компьютер 3 может быть также расположен на другой стороне вертикальной планки.
Средство 5 обеспечения коррекции используется для коррекции датчика 2 глубины. Так как достаточно трудно, чтобы датчик глубины находился абсолютно параллельно плоскости, где находится платформа для размещения предмета во время установки, коррекция является предпочтительной. Средство обеспечения коррекции сформировано главным образом из сеток или отпечатков, имеющих текстуры черно-белой шахматной доски и прозрачные плоские пластины; сетки или отпечатки (такие как пластиковый лист или бумага), имеющие текстуры черно-белой шахматной доски, накладывают на платформу 4 для размещения предмета перед прижатием прозрачной плоской пластины к сеткам или отпечаткам таким образом, чтобы сетки или отпечатки были ровными. В данном случае, текстуры черно-белой шахматной доски подобны шахматной доске, имеющей чередующиеся черные и белые прямоугольники (не показаны) в каждой строке и столбце. Прозрачную плоскую пластину можно выбрать из закаленной стеклянной пластины или органической стеклянной пластины, и измеряемый предмет 9 размещается на прозрачной плоской пластине.
Что касается товаров широкого потребления при электронной торговле, то на них обычно наносят штрих-коды. Переносной сканер штрих-кода (не показан) может быть подключен к компьютеру 3 для того, чтобы сканировать штрих-код на измеряемом предмете. Компьютер 3, который может представлять собой так называемый ноутбук или планшетный компьютер, соединен с датчиком 2 глубины и сканером штрих-кода, соответственно, через USB-интерфейсы.
На фиг.2 показана схема, иллюстрирующая основные этапы способа измерения размеров предмета согласно варианту осуществления настоящего изобретения. Способ реализован на основе устройства для измерения размеров предмета, показанного на фиг.1.
Этап S21: Захватить, с помощью датчика глубины, картинку средства обеспечения коррекции и измерить пространственные координаты верхней поверхности средства обеспечения коррекции.
Этап 22: Определить, с помощью компьютера, расстояние от средства обеспечения коррекции до датчика глубины на основании картинки и пространственных координат.
Этап S23: После того, как измеряемый предмет размещен на средстве обеспечения коррекции, отправить, с помощью датчика глубины, обнаруженную карту глубин в компьютер.
Этап S24: Вычислить, с помощью компьютера и согласно данным, принятым для получения данных о длине, ширине и высоте измеряемого предмета. На этом этапе компьютер вычисляет высоту H измеряемого предмета, согласно H=D-d-h, где D - расстояние от средства обеспечения коррекции до датчика глубины, d - минимальное значение глубины в скорректированной карте глубины, и h - толщина прозрачной плоской пластины; и компьютер определяет ограничивающий прямоугольник пикселей, каждый из которых имеет глубину больше d и меньше D-h в карте значений глубины, длины и ширины ограничивающего прямоугольника, используемых в качестве длины и ширины измеряемого предмета. Для коробки правильной кубической формы полученные длина и ширина представляют собой длину и ширину куба; для предмета неправильной формы полученные длина и ширина представляют собой длину и ширину куба, занятого предметом. Компьютер может выводить данные о длине, ширине и высоте, полученные на этом этапе в порядке их возрастания для ссылки на товары, которые классифицирует человек.
Далее будут даны подробные пояснения относительно приведенного выше этапа. Согласно модели формирования изображения с помощью точечной диафрагмы соотношение между точками Q с координатами [X, Y, Z] в реальной окружающей среде и пикселем q на картинке удовлетворяет следующим требованиям:
q=MQ, где 
где x - x-координата пикселя, y - y-координата пикселя, w - глубина, измеренная датчиком, M - внутренняя матрица камеры. Согласно приведенной выше формуле любая точка на картинке может отображаться в реальной окружающей среде. Затем согласно формуле для расстояния между двумя точками, можно получить расстояние между двумя любыми точками, указанными на картинке.
На этапе S22, в частности, расстояние от средства обеспечения коррекции до датчика глубины получается путем решения задачи PnP согласно координате заданных маркированных точек на картинке и пространственным координатам. Другими словами, картинка средства обеспечения коррекции снимается тогда, когда измеряемый предмет не расположен на устройстве для измерения размеров предмета. Расстояние D от рабочего стола тележки до датчика глубины и угол θ между плоскостью датчика глубины и плоскостью, где находится средство обеспечения коррекции, можно получить путем решения задачи PnP на основании разности между реальными координатами соответствующих точек на средстве обеспечения коррекции и их координатами измерения, измеренными с помощью камеры. Задача PnP является основной задачей калибровки камеры (подробности смотри в соответствующих документах в предшествующем уровне техники). В варианте осуществления входными параметрами задачи PnP являются координаты точек меток N на средстве обеспечения коррекции. Например, если используются точки меток 5×7=35, и выходная величина представляет собой угол θ, может быть три ортогональных угловых компонента, где только поперечная составляющая и продольная составляющая используются в варианте осуществления, и угловая составляющая, которая вращается вдоль продольной оси, не используется. При использовании угла θ данные, полученные с помощью датчика глубины, можно скорректировать. В варианте осуществления D и d, как указано выше, корректируются путем решения задачи PnP.
На фиг.3 показана схема, иллюстрирующая основные модули аппаратного устройства для измерения размеров предмета согласно варианту осуществления настоящего изобретения. Аппаратное устройство можно выполнить в вышеупомянутом компьютере в виде программного обеспечения для осуществления способа измерения размеров предмета в варианте осуществления. Как показано на фиг.3, аппаратное устройство 30 для измерения размеров предмета в основном содержит первый модуль 31 приема, первый модуль 32 вычисления, второй модуль 33 приема, второй модуль 34 вычисления и третий модуль 35 вычисления.
Первый модуль 31 приема используется для приема картинки средства обеспечения коррекции, захваченного датчиком глубины, и пространственных координат верхней поверхности средства обеспечения коррекции, измеренных датчиком глубины; первый модуль 32 вычисления используется для определения расстояния от средства обеспечения коррекции до датчика глубины на основании картинки и пространственных координат; второй модуль 33 приема используется для приема карты глубин, обнаруженной датчиком глубины после размещения измеряемого предмета, на средстве обеспечения коррекции; второй модуль 34 вычисления используется для вычисления высоты H измеряемого предмета, согласно H=D-d-h, где D - расстояние от средства обеспечения коррекции до датчика глубины, d - минимальное значение глубины в скорректированной карте глубины, и h - толщина прозрачной плоской пластины; третий модуль 35 вычисления используется для определения ограничивающего прямоугольника пикселей, каждый из которых имеет глубину больше d и меньше D-h в карте значений глубины, длины и ширины ограничивающего прямоугольника, используемых в качестве длины и ширины измеряемого предмета.
Первый модуль 32 вычисления дополнительно используется для получения расстояния от средства обеспечения коррекции до датчика глубины путем решения задачи PnP согласно координате заданных маркированных точек на картинке и пространственным координатам.
Аппаратное устройство 30 для измерения размеров предмета может дополнительно содержать модуль вывода для вывода высоты, длины и ширины измеряемого предмета, в порядке возрастания.
Согласно техническому решению в варианте осуществления настоящего изобретения высоту, а также длину и ширину измеряемого предмета можно получить, размещая измеряемый предмет под датчиком глубины для измерения глубины, перед обработкой с помощью компьютера. Такой способ не требует от человека проведения ручного измерения, повышает эффективность и является более точным, чем ручное измерение.
Основной принцип настоящего изобретения описан выше со ссылкой на конкретный вариант осуществления. Очевидно, соответствующие компоненты или этапы в устройстве и способе настоящего изобретения можно отделить и/или объединить. Такое отделение и/или объединение следует рассматривать в качестве эквивалентного решения настоящего изобретения. Кроме того, этапы выполнения последовательности обработки, как описано выше, могут быть выполнены естественным образом в описанном порядке и временном порядке. Однако не требуется, чтобы этапы выполнялись во временном порядке, и некоторые этапы могут выполняться параллельно или независимо друг от друга.
Приведенные выше варианты осуществления не ограничивают объем защиты настоящего изобретения. Специалистам в данной области техники должно быть ясно, что различные модификации, комбинации, подкомбинации и замены могут быть сделаны в зависимости от требований к дизайну и других факторов. Любые модификации, эквивалентные замены, улучшения и тому подобное в пределах сущности и принципа настоящего изобретения должны быть включены в объем защиты настоящего изобретения.
Предложенная группа изобретений относится к средствам для измерения размеров контролируемого предмета. Устройство для измерения размеров предмета содержит датчик (2) глубины, кронштейн (1) датчика, аппаратное устройство (5) для обеспечения коррекции, платформу (4) для размещения предмета и компьютер (3). Аппаратное устройство (5) для обеспечения коррекции используется для обеспечения коррекции плоскости датчика (2) глубины, содержит сетку или печатный материал, имеющий текстуры черно-белой шахматной доски, и содержит прозрачную плоскую пластину, при этом сетку или печатный материал накладывают на платформу (4) для размещения предмета и прозрачную плоскую пластину прижимают к сетке или печатному материалу. Датчик (2) глубины находится на кронштейне (1) датчика и расположен в пространстве над платформой (4) для размещения предмета. Компьютер (3) соединен с датчиком (2). Кроме того, раскрыты способ и аппаратное устройство для измерения размеров предмета. Устройство и способ обеспечивают эффективное и точное вычисление размеров предмета. 3 н. и 7 з.п. ф-лы, 3 ил.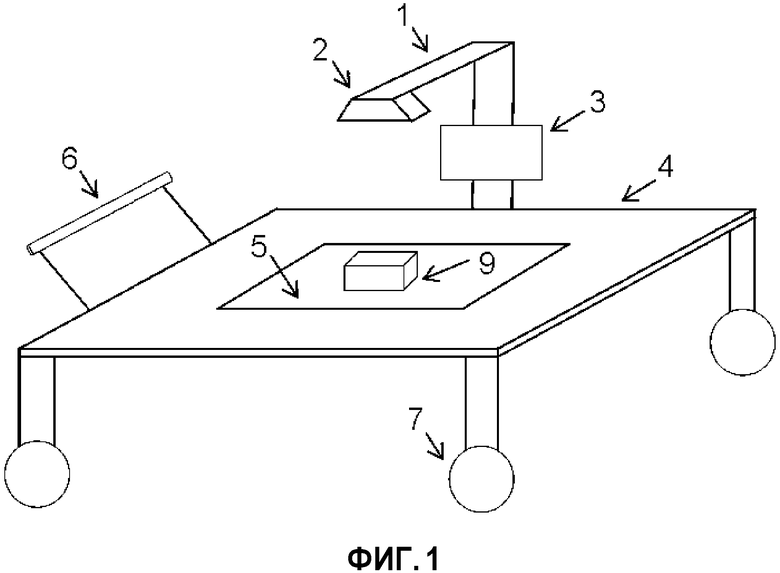
1. Устройство для измерения размеров предмета, содержащее: датчик глубины, кронштейн датчика, средство обеспечения коррекции, платформу для размещения предмета и компьютер, в котором
средство обеспечения коррекции используется для обеспечения коррекции плоскости датчика глубины и включает в себя сетки или отпечатки, имеющие текстуры черно-белой шахматной доски, а также прозрачную плоскую пластину, причем сетки или отпечатки наносятся на платформу для размещения предмета, и прозрачная плоская пластина прижимается к сеткам или отпечаткам;
датчик глубины находится на кронштейне датчика и расположен в пространстве над платформой для размещения предмета и
компьютер соединен с датчиком глубины.
2. Устройство по п.1, отличающееся тем, что:
кронштейн датчика состоит из вертикальной планки и горизонтальной планки, которые соединены друг с другом и образуют прямой угол;
датчик глубины закреплен вблизи свободного конца горизонтальной планки;
компьютер закреплен на вертикальной планке и
вертикальная планка закреплена на платформе для размещения предмета.
3. Устройство по п.1 или 2, отличающееся тем, что:
платформа для размещения предмета имеет четыре ножки, каждая из которых имеет колесо на своем конечном участке; и
устройство дополнительно содержит ручку, присоединенную к платформе для размещения предмета.
4. Устройство по п.1 или 2, отличающееся тем, что:
датчик глубины подключен к компьютеру через USB-интерфейс и
переносной сканер штрих-кода подключен к компьютеру через USB-интерфейс.
5. Способ измерения размеров предмета, который применяется в устройстве по любому из пп.1-4, причем способ содержит:
захват, датчиком глубины, картинки средства обеспечения коррекции и измерение пространственных координат верхней поверхности средства обеспечения коррекции;
определение, с помощью компьютера и на основании картинки и пространственных координат, расстояния от средства обеспечения коррекции до датчика глубины;
после размещения измеряемого предмета на средстве обеспечения коррекции отправку, датчиком глубины, обнаруженной карты глубин в компьютер;
вычисление, компьютером, высоты H измеряемого предмета согласно H=D-d-h, где D - расстояние от средства обеспечения коррекции до датчика глубины, d - минимальное значение глубины в скорректированной карте глубины и h - толщина прозрачной плоской пластины; и
определение, компьютером, ограничивающего прямоугольника пикселей, каждый из которых имеет глубину больше d и меньше D-h в карте значений глубины, длины и ширины ограничивающего прямоугольника, используемых в качестве длины и ширины измеряемого предмета.
6. Способ по п.5, отличающийся тем, что: этап определения расстояния от средства обеспечения коррекции до датчика глубины включает в себя: получение расстояния от средства обеспечения коррекции до датчика глубины путем решения задачи PnP на основе координат заданных маркированных точек на картинке и пространственных координат.
7. Способ по п.5, дополнительно содержащий: вывод, компьютером, высоты, длины и ширины измеряемого предмета в порядке возрастания.
8. Аппаратное устройство для измерения размеров предмета, которое используется для осуществления способа по любому из пп.5-7, отличающееся тем, что:
аппаратное устройство содержит:
первый модуль приема для приема картинки средства обеспечения коррекции, захваченного датчиком глубины, и пространственных координат верхней поверхности средства обеспечения коррекции, измеренных датчиком глубины;
первый модуль вычисления для определения расстояния от средства обеспечения коррекции до датчика глубины на основании картинки и пространственных координат;
второй модуль приема для приема карты глубин, обнаруженной датчиком глубины после размещения измеряемого предмета на средстве обеспечения коррекции;
второй модуль вычисления для вычисления высоты H измеряемого предмета согласно H=D-d-h, где D - расстояние от средства обеспечения коррекции до датчика глубины, d - минимальное значение глубины в скорректированной карте глубин и h - толщина прозрачной плоской пластины; и
третий модуль вычисления для определения ограничивающего прямоугольника пикселей, каждый из которых имеет глубину больше d и меньше D-h в карте значений глубины, длины и ширины ограничивающего прямоугольника, используемых в качестве длины и ширины измеряемого предмета.
9. Аппаратное устройство по п.8, отличающееся тем, что: первый модуль вычисления дополнительно используется для получения расстояния от средства обеспечения коррекции до датчика глубины путем решения задачи PnP на основе координат заданных маркированных точек на картинке и пространственных координат.
10. Аппаратное устройство по п.8 или 9, отличающееся тем, что дополнительно содержит модуль вывода для вывода высоты, длины и ширины измеряемого предмета в порядке возрастания.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Бетонная смесь | 1983 |
|
SU1150242A1 |
| СТЕРЕОСКОПИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ | 2009 |
|
RU2479828C2 |
| US 7355695 B2, 08.04.2008 | |||
| Способ прогнозирования риска развития желудочковых тахиаритмий у пациентов, перенесших инфаркт миокарда, с фракцией выброса левого желудочка менее 35% | 2019 |
|
RU2722656C1 |

