Изобретение относится к области авиации, в частности к способам контроля и диагностики технического состояния агрегатов авиационных приводов по вибрации их корпусов при работающих двигателях.
Авиационными приводами в рамках настоящей заявки считаются главные, промежуточные и хвостовые вертолетные редукторы, хвостовая трансмиссия вертолетов, центральные конические приводы и коробки приводов агрегатов авиационных двигателей.
Наиболее известные и широко используемые в настоящее время на практике способы и устройства для диагностирования технического состояния агрегатов авиационных приводов обычно сочетают статистические методы оценки надежности с контролем ограниченного количества функциональных параметров в процессе эксплуатации приводов.
Практическая реализация данных методов возможна лишь при корректном выборе контролируемых функциональных параметров, наличии эффективного инструментального обеспечения для реализации данных методов и методологии обработки получаемых функциональных параметров.
Из уровня техники известен способ диагностики технического состояния деталей, узлов и приводных агрегатов газотурбинного двигателя (RU 2379645, 2010), включающий измерение и цифровую обработку вибросигналов с корпусных конструкций газотурбинных двигателей (ГТД) и приводных агрегатов с получением информации о техническом состоянии диагностируемых деталей, узлов и приводных агрегатов ГТД. Причем измерение вибросигналов с корпусных конструкций ГТД и приводных агрегатов осуществляют дистанционно и бесконтактно посредством лазерного вибропреобразователя в приближенных к диагностируемым деталям, узлам и приводным агрегатам ГТД информативных точках на поверхности корпусных конструкций ГТД и приводных агрегатов в пределах зон измерений, определяемых радиусом, преимущественно равным четверти длины изгибной волны в корпусных конструкциях ГТД и приводных агрегатов. Цифровую обработку вибросигналов осуществляют с расчетом глубин модуляции на дискретных составляющих спектра огибающей вибрации в высокочастотном диапазоне колебаний корпусных конструкций ГТД и приводных агрегатов с получением информации о техническом состоянии диагностируемых деталей, узлов и приводных агрегатов ГТД.
Основной особенностью известного технического решения является бесконтактный съем информации о вибрации с помощью лазерных датчиков. Благодаря этому датчик не оказывает влияние на вибрации контролируемого объекта. Бесконтактный съем информации о вибрации с помощью лазерных датчиков требует дополнительных разработок крепления для бортового применения (невозможно использовать непосредственно в полете). Данный способ больше подходит для стендовых испытаний. Недостатком является низкая оперативность, т.к. требуется больше времени для установления текущего состояния агрегата.
Из уровня техники известен способ диагностики механизмов, агрегатов и машин на основе оценки микровариаций вращения вала (RU 2626388, 2017).
Способ заключается в том, что на валу контролируемого изделия устанавливают датчик частоты вращения, генерирующий при вращении вала импульсы. При вращении вала с постоянной угловой скоростью датчик выдает импульсную последовательность с постоянными межимпульсными интервалами. Наличие дефекта приводит к возникновению микровариаций вращений вала и, следовательно, к вариациям межимпульсных интервалов в импульсной последовательности, генерируемой датчиком. С помощью порогового устройства формируют стандартную последовательность единичных импульсов и последовательность, прореженную в целое число раз с помощью делителя частоты, затем производят измерение временных интервалов между импульсами исходной последовательности или прореженной последовательности. После этого для стандартной или прореженной последовательности находят среднеквадратичное отклонение значений интервалов между импульсами от среднего значения, и если зафиксированное среднеквадратичное отклонение выше определенного порога, то делают заключение о наличии у изделия дефекта.
В отличие от заявленного изобретения, данное техническое решение представляет собой интегральную оценку работы кинематической цепи агрегатов и может использоваться в качестве экспресс-оценки без определения локализации дефекта в кинематической цепи агрегатов и определения его вида.
Из уровня техники известен способ диагностики технического состояния агрегата авиационного привода (RU 2499240, 2013).
В известном способе получение эталонной виброхарактеристики осуществляют формированием базовой виброхарактеристики, которое проводят путем измерения и регистрации значений вибросигнала на рабочих частотах вращения ротора при наземных испытаниях двигателя, а также формированием эксплуатационной виброхарактеристики, для чего проводят заданную серию полетов. На каждом из полетов серии по показаниям значений вибросигнала на рабочих частотах вращения ротора формируют локальную эксплуатационную виброхарактеристику, задают порог отклонения локальных эксплуатационных виброхарактеристик от базовой. Каждую полученную локальную виброхарактеристику серии сравнивают с базовой и по локальным виброхарактеристикам, значения которых не выходят за пределы установленного порога при сравнении с базовой характеристикой, формируют эталонную виброхарактеристику.
Недостатком известного способа является то, что в нем контролируются только вибрации ротора ГТД. Вибрационное состояние центрального привода и коробок приводов агрегатов, являющихся важными элементами двигателей, не контролируется.
Наиболее близким аналогом заявленного изобретения является способ диагностики технического состояния агрегата авиационного привода (RU 2519583, 2014), в котором осуществляют расчет основных частот вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода, выбирают параметры датчика вибраций и место его размещения с последующей его установкой на корпусе агрегата авиационного привода или во внутренней полости агрегата авиационного привода таким образом, что получают данные о вибрациях с полнотой, достаточной для диагностики технического состояния агрегата авиационного привода, производят регистрацию сигнала s(n) вибраций агрегата авиационного привода и синхросигнала f(n) с датчика частоты вращения авиационного привода.
При реализации известного способа не обеспечивается получение информации о значениях параметров вибраций множества деталей авиационного привода на основных частотах их вынужденных колебаний и соответствующих пороговых значениях уровней вибрации, что не позволяет в полной мере судить о техническом состоянии деталей агрегатов, таких как валы и зубчатые колеса редукторов, и определять причину неисправности агрегата. Для получения информации о причине неисправности агрегата требуется остановка испытания и разборка привода в наземных условиях, что не позволяет проводить диагностику технического состояния агрегата авиационного привода в оперативном режиме.
Техническая проблема, решаемая заявленным изобретением, заключается в создании способа, позволяющего с использованием ограниченного количества датчиков вибраций оперативно оценивать техническое состояние агрегата авиационного привода и определять причину его неисправности после каждого полета или непосредственно в полете, без необходимости демонтажа и проведения исследований в наземных условиях.
Техническим результатом, достигаемым заявленным изобретением, является повышение точности диагностики технического состояния агрегата авиационного привода.
Указанный технический результат достигается за счет того, что в способе диагностики технического состояния агрегата авиационного привода осуществляют расчет основных частот вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода, выбирают параметры датчика вибраций и место его размещения с последующей его установкой на корпусе агрегата авиационного привода или во внутренней полости агрегата авиационного привода таким образом, что получают данные о вибрациях с полнотой, достаточной для диагностики технического состояния агрегата авиационного привода, производят регистрацию сигнала s(n) вибраций агрегата авиационного привода и синхросигнала f(n) с датчика частоты вращения авиационного привода, предварительно определяют пороговые значения параметра вибраций деталей агрегата авиационного привода по результатам стендовых испытаний, на основании синхросигнала f(n) определяют минимальное ƒminЧВ и максимальное ƒmаxЧВ значения частоты вращения привода в заданном интервале времени Т, на основании полученных значений ƒminЧВ и ƒmаxЧВ рассчитывают основные частоты вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода, на основании сигнала s(n) определяют значения параметра вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний в интервале времени Т, а затем сравнивают полученные значения параметра вибраций с его пороговыми значениями, и на основании сравнения значений параметра вибраций делают вывод о техническом состоянии агрегата авиационного привода.
Существенные признаки могут иметь развитие и продолжение. В качестве значений параметра вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний в интервале Т могут определять амплитуды вибраций по формуле:
 , где
, где
А - амплитуда вибраций детали привода на основной частоте вынужденных колебаний;
k - индекс частотной составляющей сигнала s(n), преобразованного в соответствии с прямым дискретным преобразованием Фурье;
Аk - вещественная амплитуда k-го сигнала s(n), преобразованного в соответствии с прямым дискретным преобразованием Фурье;
 ;
;
 ;
;
ƒminВ - минимальное значение основной частоты вынужденных колебаний детали привода в интервале Т;
ƒmаxВ - максимальное значение основной частоты вынужденных колебаний детали привода в интервале Т;
N - заданное число дискретных значений сигналов s(n) и f(n);
F - заданная частота дискретизации сигналов s(n) и f(n);
Round(a) представляет собой функцию целочисленного округления значения а.
Под «основными частотами» в рамках настоящей заявки понимаются характерные частоты вынужденных колебаний, возбуждаемые деталями агрегата авиационного привода.
Существенность отличительных признаков способа диагностики технического состояния агрегата авиационного привода подтверждается тем, что только совокупность всех действий и операций, описывающая изобретение позволяет решить поставленную техническую проблему с достижением заявленного технического результата, так как получение информации о параметрах вибраций всего множества деталей авиационного привода на основных частотах их вынужденных колебаний и соответствующих пороговых значениях параметров вибраций при использовании ограниченного числа датчиков вибраций позволяет более эффективно оценивать параметры вибраций и посредством этого более точно диагностировать техническое состояние и причину неисправности агрегата авиационного привода.
Указанный дополнительный признак определения в качестве значений параметра вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний в интервале Т амплитуды вибраций по указанной формуле также влияет на достижение заявленного технического результата, позволяя дополнительно повысить точность диагностики технического состояния по каждой детали авиационного привода за счет применения описанного далее алгоритма следящего анализа.
Признаки и сущность заявленного изобретения поясняется в последующем детальном описании, иллюстрируемом чертежами.
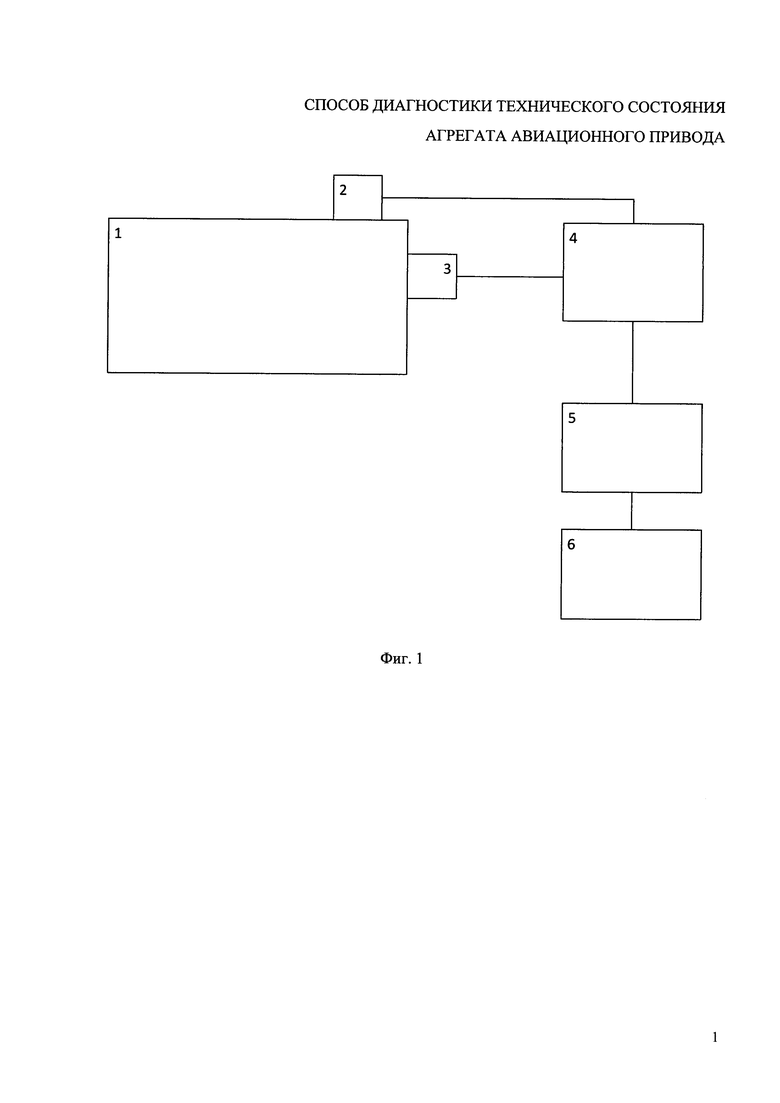
На фиг. 1 представлена схема системы для реализации способа диагностики технического состояния агрегата авиационного привода;
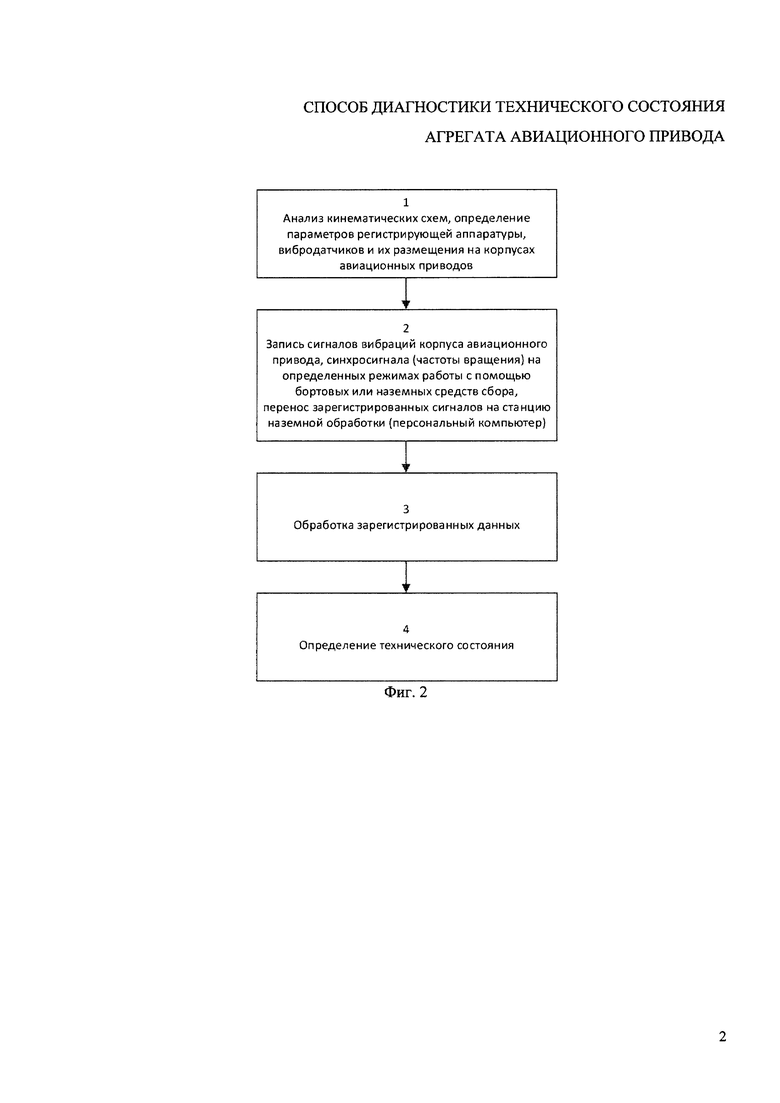
На фиг. 2 представлены основные этапы способа диагностики технического состояния агрегата авиационного привода;
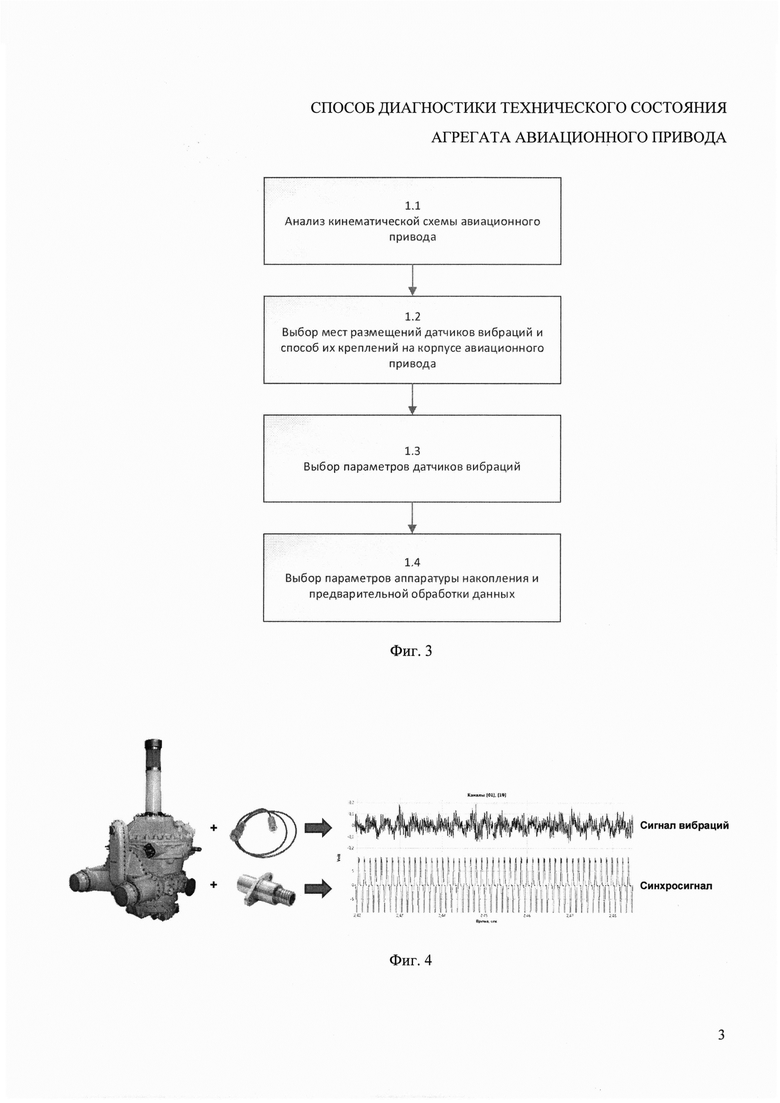
На фиг. 3 представлены подэтапы анализа кинематических схем и подготовки аппаратуры для определения уровней вибраций на частотах вынужденных колебаний деталей авиационного привода;
На фиг. 4 представлена схема получения необходимых сигналов для выполнения следящего анализа;
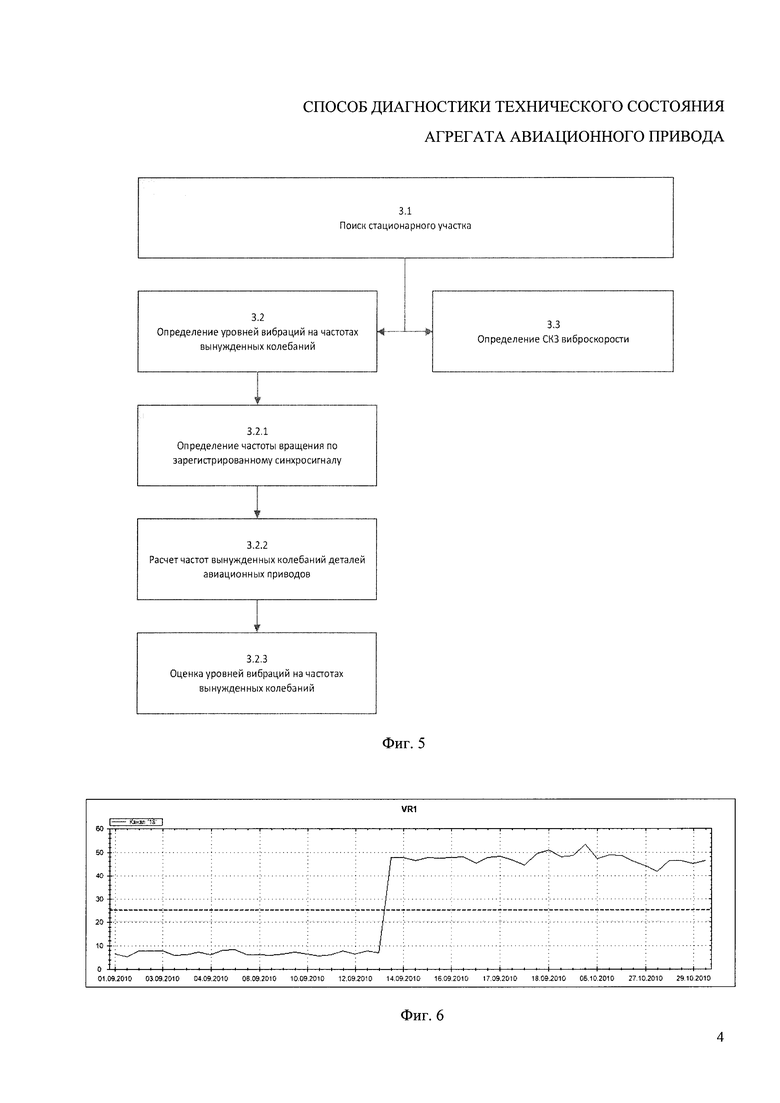
На фиг. 5 представлена последовательность обработки зарегистрированных данных;
На фиг. 6 показано изменение значения амплитуды вибраций на частоте вращения вала рулевого винта;
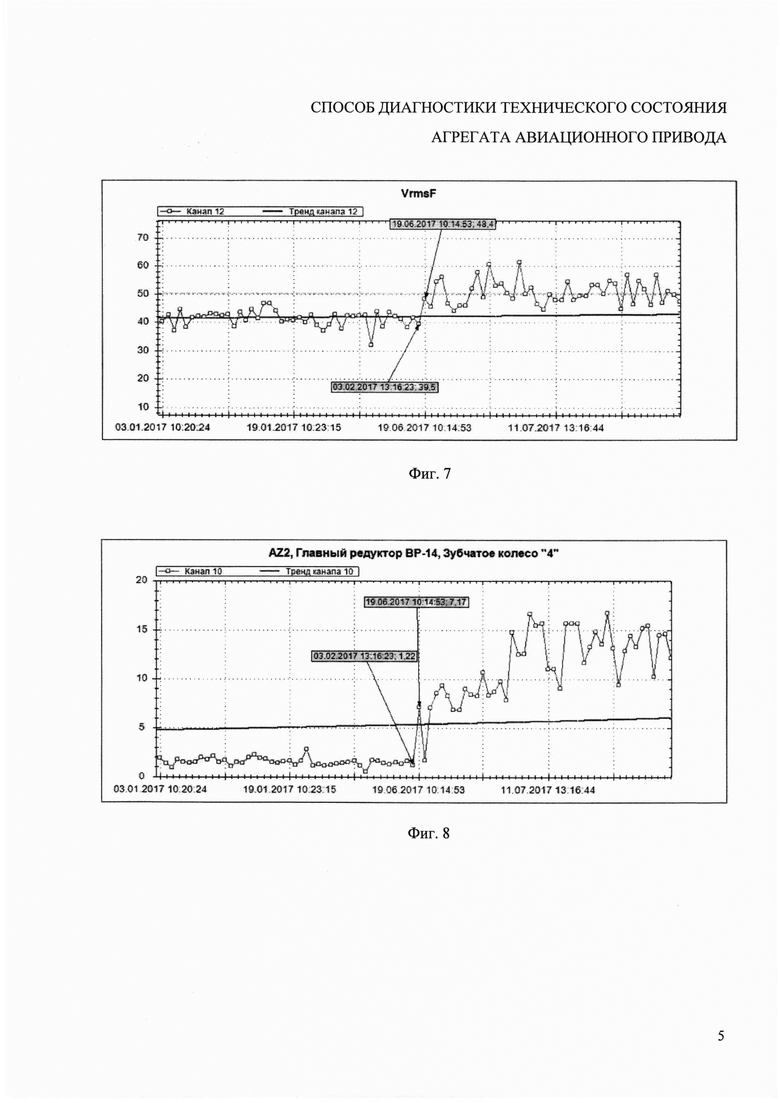
На фиг. 7 показано изменение значения параметра среднеквадратического значения (СКЗ) виброскорости VrmsF;
На фиг. 8 показано изменение значения амплитуды вибраций на частоте второй зубцовой AZ2;
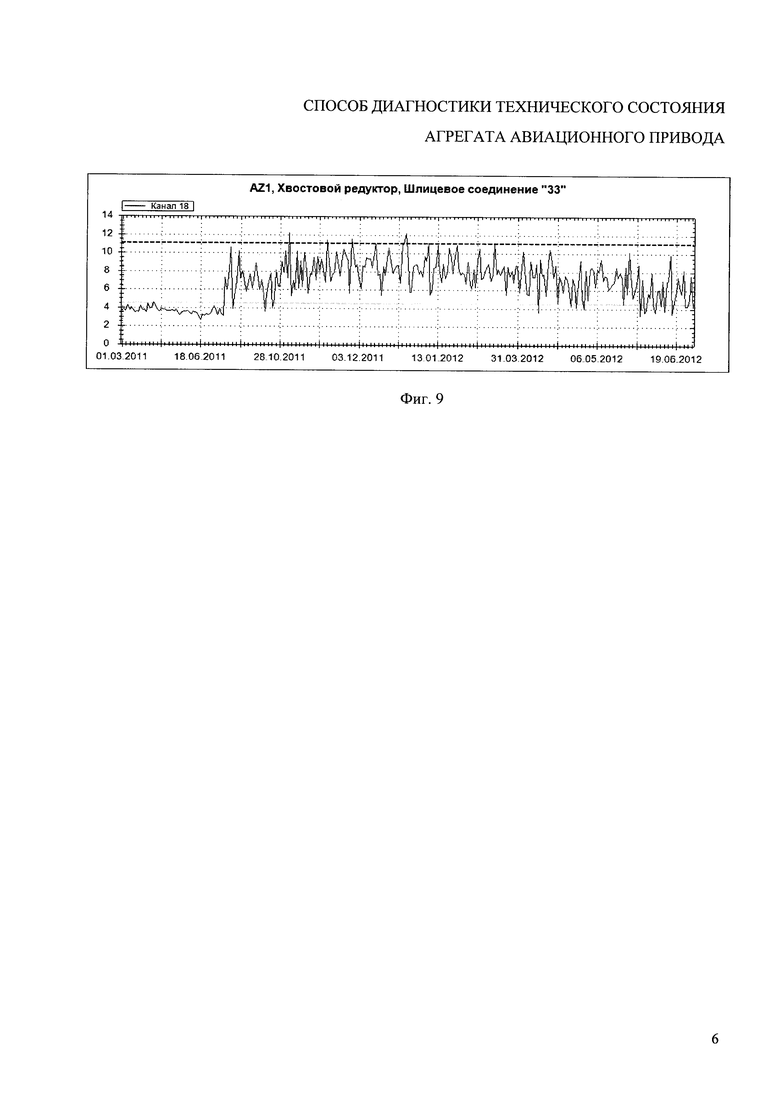
На фиг. 9 показано изменение значения амплитуды вибраций на шлицевой частоте AZ1.
На фиг. 1 представлена функциональная схема системы для реализации способа диагностики технического состояния агрегата авиационного привода.
Система состоит из агрегата 1 авиационного привода с установленным на нем датчиком 2 вибраций и датчиком 3 частоты вращения, аппаратуры 4 регистрации, блока 5 анализа и блока 6 сравнения.
Выходы датчиков 2, 3 вибраций и частоты вращения соединены с соответствующими информационными входами аппаратуры 4 регистрации, выход которой соединен со входом блока 5 анализа, а выход блока 5 анализа соединен со входом блока 6 сравнения.
Способ диагностики технического состояния агрегата авиационного привода осуществляется следующим образом.
Основные этапы диагностики представлены на фиг. 2.
На предварительном этапе (1) производят анализ кинематических схем, проводимый с целью расчета параметров датчика 2 вибраций и его размещение на корпусе агрегата 1 авиационного привода. Данный этап состоит из подэтапов, представленных на фиг. 3.
На подэтапе (1.1) осуществляют анализ кинематических схем авиационного привода, включающий расчет основных частот вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода.
На данном подэтапе рассчитывают основные частоты вынужденных колебаний, возбуждаемые при работе роторов двигателя, валов и зубчатых колес редукторов и коробок привода, обобщенно называемых деталями агрегата авиационного привода в рамках настоящей заявки, в соответствии с их кинематическими схемами.
Основными частотами в рамках настоящей заявки являются:
- роторная (частота вращения какого-либо вала) и кратные частоты;
- зубцовая (частота пересопряжения зубьев) и кратные ей частоты;
- шлицевые частоты (частоты вынужденных колебаний шлицевых соединений);
- подшипниковые частоты;
- комбинации вышеперечисленных частот.
Характерные частоты подшипников представлены на страницах 62-66 в разделе "Кинематика подшипников" главы 2 справочника "Подшипники качения", издание шестое, Москва "Машиностроение", 1975.
В результате расчета определяют значения частот вынужденных колебаний, генерируемых зубчатыми колесами, подшипниками качения и иными деталями агрегата авиационного привода, по которым в дальнейшем определяют требования к рабочему частотному диапазону датчика вибраций.
На подэтапе (1.2) выбирают место размещения датчика 2 вибраций на наружном корпусном элементе или во внутренней полости диагностируемого агрегата 1.
Место установки датчика и направления его чувствительных осей определяют в соответствии с результатами моделирования распространения сигналов вибраций по конструкции привода.
Датчик 2 вибраций устанавливают с помощью специально предназначенного кронштейна (см. RU 2519583), который должен быть разработан с учетом амплитудно-частотной характеристики (АЧХ) системы «датчик-кронштейн-корпус привода». Более предпочтительны предусмотренные конструкцией приливы на корпусе привода с возможностью крепления датчика вибраций, для исключения влияния системы «датчик-кронштейн-корпус привода» на результаты измерений.
На подэтапе (1.3) экспериментальным путем определяют параметры датчика вибраций 2, в частности выбирают рабочий частотный диапазон датчика вибраций таким образом, чтобы он охватывал основные частоты всех зубчатых передач, исходя из вибрационной активности приводов и агрегата 1 в месте установки датчика. Такой выбор параметров датчика 2 вибраций позволяет получить данные о вибрациях деталей агрегата 1 авиационного привода с полнотой, достаточной для диагностики его технического состояния.
На этапе (2) производят запись сигналов с датчика 2 вибраций и датчика 3 частоты вращения привода.
В редукторах и коробках приводов основными источниками вибраций являются зубчатые передачи, подшипники качения и т.д. Сигнал вибраций, регистрируемый с датчика, установленного на корпусе редуктора или коробки приводов, содержит в себе весь спектр вынужденных колебаний, генерируемый этими деталями на своих основных частотах. Таким образом, можно рассматривать модель вибраций редуктора как полигармоническую, т.е. равную сумме колебаний на этих частотах.
В реальных условиях эксплуатации наблюдается «размазывание» компонент в спектрах регистрированного сигнала. Такое явление может происходить по нескольким причинам: из-за флуктуации оборотов на квазистационарных режимах работы двигателей, а также наличия допустимого или недопустимого износа и дефектов деталей.
На данном этапе с датчика вибраций, установленного на авиационном приводе на этапе (1), во время полета снимают и регистрируют сигнал вибраций. Данный сигнал содержит весь спектр вынужденных колебаний, генерируемый деталями агрегата 1 авиационного привода на своих основных частотах.
Одновременно регистрируют синхросигнал (сигнал синхронизации), представляющий собой сигнал с датчика 3 частоты вращения, установленного на одном из валов агрегата 1 авиационного привода (фиг. 4).
Регистрацию и запись сигналов вибраций и синхронизации осуществляют на заданных режимах работы авиационного привода с помощью бортовой или наземной аппаратуры 4 регистрации.
В частности, регистрация сигналов производится на стационарных режимах работы длительностью не менее 20 секунд.
Для последующего анализа зарегистрированные сигналы могут быть переданы на станцию наземной обработки по радиосвязи.
Каждый из зарегистрированных сигналов вибраций и синхронизации представляет собой N дискретных значений:
s(n), n=0 ,…, N-1;
ƒ(n), n=0…, N-1;
взятых за интервал времени Δt:
 ;
;
где F - частота дискретизации зарегистрированных сигналов вибраций и синхронизации.
На этапе (3) обрабатывают зарегистрированные данные с помощью блока 5 анализа. Данный этап может быть осуществлен с помощью алгоритма, выполняемого персональным компьютером станции наземной обработки или бортовыми электронными блоками накопления.
Последовательность обработки зарегистрированных данных представлена на фиг. 5.
На подэтапе (3.1) задают интервал времени Т синхросигнала для последующего анализа сигнала вибраций.
Для этого:
а) выбирается длина интервала времени Т, достаточного для анализа сигнала вибраций, равная:
Т=t2-t1, где
t1 - время начала интервала;
t2 - время окончания интервала;
б) в синхросигнале f(n) выполняется поиск интервала Т выбранной длины.
Длина интервала времени Т выбирается исходя из требований к аппаратуре 4 регистрации и блока 5 анализа.
В частном случае, в синхросигнале выполняется поиск стационарного участка с минимальным разбросом частоты вращения путем анализа изменения значения частоты вращения в зарегистрированной записи. Контроль стационарности производят по пороговым значениям разброса синхросигнала. Таким образом, можно отбрасывать нестационарные записи во избежание некорректной оценки значений параметров вибраций на частотах вынужденных колебаний деталей авиационного привода, так как резкое изменение частоты вращения ведет к резкому изменению частот вынужденных колебаний, что приводит к перекрытию близких частот за наблюдаемый период и вносит неоднозначность в оценке.
Пороговые значения разброса частоты вращения определяются экспериментальным путем исходя из требований, предъявляемых к точности оценки значений параметров вибраций, и могут составлять, например, от 1 до 5%.
На подэтапе (3.2) определяют уровни вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний.
На подэтапах (3.2.1) и (3.2.2) определяют основные частоты вынужденных колебаний деталей агрегата авиационного привода следующим образом:
а) за выбранный интервал времени Т определяют минимальное ƒminЧВ и максимальное ƒmaxЧВ значения частоты вращения вала с установленным датчиком частоты вращения (ДЧВ) на основании зарегистрированного синхросигнала (подэтап 3.2.1);
б) имея информацию о кинематической схеме авиационного привода, определяют частоту вращения рассматриваемого вала как
ƒв=iƒ(n).
i - передаточное отношение от вала с ДЧВ до рассматриваемого вала (подэтап 3.2.2).
В частности, на основании ƒminЧВ и ƒmaxЧВ, получают минимальное и максимальное значение основных частот за интервал Т:
для роторной частоты (частоты вращения какого-либо вала):
ƒminB=iƒminЧB;
ƒmaxB=iƒmaxЧВ;
для зубцовой или шлицевой частоты (частот вынужденных колебаний, соответственно зубчатого колеса или шлицевого соединения):
ƒminB=iƒminЧBZ;
ƒmaxB=iƒmaxЧВZ;
где Z - количество зубьев зубчатого колеса или количество шлиц шлицевого соединения.
Другие частоты вынужденных колебаний вычисляют аналогичным способом.
На подэтапе 3.2.3 определяют значения параметра вибраций деталей агрегата авиационного привода на частотах их вынужденных колебаний с применением следящего анализа.
В частном случае, параметром вибраций могут быть амплитуды сигналов виброускорения или виброскорости.
В предлагаемом способе с помощью преобразования Фурье оцениваются спектральные компоненты вибрационного сигнала с учетом флуктуации частоты вращения.
Прямое преобразование Фурье дискретного сигнала имеет вид:
Входными данными преобразования Фурье является сигнал s(n).
Выходными данными прямого преобразования Фурье являются комплексные амплитуды Sk на частотах:
 .
.
Вещественная амплитуда каждой составляющей полученного сигнала равна:
Значение амплитуды вибраций детали авиационного привода на основной частоте вынужденных колебаний рассчитывают по формуле:
 , где
, где
А - амплитуда вибраций детали привода на основной частоте вынужденных колебаний;
k - индекс частотной составляющей сигнала s(n), преобразованного в соответствии с прямым дискретным преобразованием Фурье;
Аk - вещественная амплитуда k-го сигнала s(n), преобразованного в соответствии с прямым дискретным преобразованием Фурье;
 I>
I>
ƒminB - минимальное значение основной частоты вынужденных колебаний детали привода в интервале Т;
ƒmaxB - максимальное значение основной частоты вынужденных колебаний детали привода в интервале Т;
N - заданное число дискретных значений сигналов s(n) и f(n);
F - заданная частота дискретизации сигналов s(n) и f(n).
Round(a) представляет собой функцию целочисленного округления значения а.
Например, при оценке уровня вибраций на частоте пересопряжения зубьев зубчатого колеса (зубцовой частоте), зубцовая частота ƒz рассчитывается по формуле:
ƒz=iƒ(n)Z
Отсюда амплитуда Az будет равна:
 , где
, где
 ;
;
 .
.
Для каждого зубчатого колеса и подшипника качения по указанному алгоритму определяются амплитуды вибраций на основных частотах вынужденных колебаний.
В другом частном случае, в качестве параметра вибраций на подэтапе (3.3) определяют среднеквадратическое значение (СКЗ) виброскорости VrmsF путем интегрирования сигнала вибраций в частотной области с последующим выбором контролируемой полосы частот.
На этапе (4) определяют техническое состояние агрегата 1 авиационного привода. Данный этап осуществляется с помощью блока 6 сравнения.
Для осуществления данного этапа предварительно, по результатам экспериментальных исследований, определяют пороговые значения параметра сигнала вибраций деталей агрегата 1 авиационного привода на основных частотах.
Данные пороговые значения могут быть получены с помощью моделирования сигналов вибраций на основе значений, полученных экспериментальным путем, с учетом данных о кинематической схеме агрегата авиационного привода и для различных частот вращения привода.
Далее, полученные по результатам этапа (3) значения параметра вибраций сравнивают с соответствующими пороговыми значениями.
Пороговыми значениями параметров вибраций в рамках настоящей заявки считаются такие значения, при которых контролируемые параметры состояния деталей авиационных приводов выходят из допуска.
Например, амплитуда вибраций на роторной частоте вала рулевого винта вертолета Ми-8МТВ1, превышающая 47 мм/сек по датчику, установленному на рулевом винте, является признаком дисбаланса узла рулевого винта (фиг. 6).
Параметр VrmsF в полосе частот от 2 до 2000 Гц, превышающий 48 мм/сек по датчику, установленному на опоре хвостовой трансмиссии вертолета типа Ми-8/17, является признаком повышенного излома и повышенного зазора в шлицевых соединениях вблизи данной опоры трансмиссии вертолета (фиг. 7).
Значение амплитуды вибраций на частоте второй зубцовой (параметр AZ2), превышающий 7 величин ускорения свободного падения g (около 68,6 м/с2) по датчику, установленному в районе крепления корпуса тормоза несущего винта вертолета типа Ми-8/17, является признаком некачественного изготовления или сборки главного редуктора вертолета (фиг. 8).
Значение амплитуды вибраций на шлицевой частоте AZ1, превышающее 6 g (около 58,8 м/с2) по датчику, установленному на хвостовом редукторе вертолета типа Ми-8МТВ1, является признаком повышенного бокового зазора в шлицевом соединении ведущего вала 8А-1517-111 хвостового редуктора вертолета Ми-8МТВ1 (фиг. 9).
В частном случае, система для реализации способа диагностики технического состояния агрегата авиационного привода может содержать один или несколько дополнительных датчиков 2 вибраций, которые устанавливаются максимально близко к особо нагруженным, ответственным и важным для диагностики технического состояния агрегата авиационного привода зубчатым передачам, при этом направление оси чувствительности этих датчиков должно совпадать с направлением сил в зацеплении зубчатых колес.
Кроме того, система может содержать один или несколько датчиков 3 частоты вращения, установленных на других валах агрегата 1 авиационного привода.
В данном случае в способе на подэтапе (2) регистрируют один или несколько дополнительных сигналов вибраций с дополнительных датчиков 2 вибраций, каждый из которых применяют для оценки значений параметров вибраций соответствующих зубчатых передач агрегата авиационного привода на частотах их вынужденных колебаний.
Обработка данных сигналов позволяет получить более точные значения параметров вибраций данной зубцовой передачи, поскольку частоты спектра вынужденных колебаний зубцовой передачи в сигнале, полученном с датчика, расположенного далеко от нее, подвержены затуханию.
Также может быть зарегистрирован один или несколько дополнительных синхросигналов с дополнительных датчиков 3 частоты вращения, каждый из которых применяют для расчета частот вынужденных колебаний деталей авиационного привода, соответствующих валу, на котором установлен дополнительный датчик частоты вращения.
В частном случае, после этапа (1.3) способ дополнительно содержит подэтап (1.4), на котором определяют параметры аппаратуры 4 регистрации.
Аппаратура 4 регистрации, предназначенная для регистрации и обработки сигналов с датчиков 2, 3, должна отвечать определенным требованиям, предъявляемым к частоте дискретизации F и разрядности аналого-цифровых преобразователей (АЦП), а также возможности параллельного опроса измерительных каналов. Частота дискретизации определяет верхний диапазон частот регистрируемого сигнала и должна быть как минимум в два раза больше максимального значения контролируемой основной частоты возбуждения вибраций детали с максимальной частотой вращения. Разрядность АЦП - это количество дискретных значений напряжения (шаг квантования), на которые может делиться рабочий диапазон входных напряжений.
В частности, могут использоваться 16 или 24-разрядные АЦП. При этом упрощается процесс адаптации чувствительности первичных преобразователей и согласующих усилителей к аппаратуре регистрации, снижаются шумы квантования сигналов по уровню, сохраняются метрологические характеристики тракта аналого-цифрового преобразования, отсутствует необходимость коммутаций во входных цепях.
Наличие в аппаратуре 4 процессоров цифровой обработки (ПЦО) позволяет осуществлять оценку и накопление параметров регистрируемых сигналов (диагностических признаков) для их контроля в процессе работы летательного аппарата (ЛА) и уже при наземной обработке выполнять экспресс-анализ технического состояния. Подобная аппаратура с ПЦО, предпочтительно, используется в составе штатных бортовых систем диагностики ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОДИАГНОСТИКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2499240C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 2012 |
|
RU2522275C2 |
| СПОСОБ ВИБРОДИАГНОСТИРОВАНИЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ В ЭКСПЛУАТАЦИИ ПО ИНФОРМАЦИИ БОРТОВЫХ УСТРОЙСТВ РЕГИСТРАЦИИ | 2014 |
|
RU2556477C1 |
| Способ вибродиагностики технического состояния газоперекачивающего агрегата | 2023 |
|
RU2809309C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕЖРОТОРНОГО ПОДШИПНИКА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2537669C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕЖРОТОРНОГО ПОДШИПНИКА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2478923C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ (ВОЗМУЩЕНИЙ) В ГАЗОВЫХ ЦЕНТРИФУГАХ ИЗОТОПНО-РАЗДЕЛИТЕЛЬНОГО КАСКАДА И СИСТЕМА ДИАГНОСТИКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236308C2 |
| Способ виброакустической диагностики технического состояния межроторного подшипника двухвального газотурбинного двигателя | 2022 |
|
RU2789570C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИТАТЕЛЯ | 2013 |
|
RU2514461C1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ ШЕСТЕРЁН РЕДУКТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2643696C1 |
Изобретение относится к области авиации, в частности к способам контроля и диагностики технического состояния агрегатов авиационных приводов по вибрации их корпусов при работающих двигателях. Техническим результатом, достигаемым в заявленном изобретении, является повышение точности диагностики технического состояния авиационного привода. Технический результат достигается тем, что в способе диагностики технического состояния агрегата авиационного привода предварительно определяют пороговые значения параметра вибраций деталей агрегата авиационного привода по результатам стендовых испытаний, на основании синхросигнала f(n) определяют минимальное ƒminЧВ и максимальное ƒmaxЧВ значения частоты вращения привода в заданном интервале времени Т, на основании полученных значений ƒminЧВ и ƒmaxЧВ рассчитывают основные частоты вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода, на основании сигнала s(n) определяют значения параметра вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний в интервале времени Т, а затем сравнивают полученные значения параметра вибраций с его пороговыми значениями и на основании сравнения значений параметра вибраций делают вывод о техническом состоянии агрегата авиационного привода. 1 з.п. ф-лы, 9 ил.
1. Способ диагностики технического состояния агрегата авиационного привода, в котором осуществляют расчет основных частот вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода, выбирают параметры датчика вибраций и место его размещения с последующей его установкой на корпусе агрегата авиационного привода или во внутренней полости агрегата авиационного привода таким образом, что получают данные о вибрациях с полнотой, достаточной для диагностики технического состояния агрегата авиационного привода, производят регистрацию сигнала s(n) вибраций агрегата авиационного привода и синхросигнала f(n) с датчика частоты вращения авиационного привода, отличающийся тем, что предварительно определяют пороговые значения параметра вибраций деталей агрегата авиационного привода по результатам стендовых испытаний, на основании синхросигнала f(n) определяют минимальное ƒminЧВ и максимальное ƒmaxЧВ значения частоты вращения привода в заданном интервале времени Т, на основании полученных значений ƒminЧВ и ƒmaxЧВ рассчитывают основные частоты вынужденных колебаний, возбуждаемых деталями агрегата авиационного привода, на основании сигнала s(n) определяют значения параметра вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний в интервале времени Т, а затем сравнивают полученные значения параметра вибраций с его пороговыми значениями и на основании сравнения значений параметра вибраций делают вывод о техническом состоянии агрегата авиационного привода.
2. Способ по п. 1, отличающийся тем, что в качестве значений параметра вибраций деталей агрегата авиационного привода на основных частотах их вынужденных колебаний в интервале Т определяют амплитуды вибраций по формуле
 ,где
,где
А - амплитуда вибраций детали привода на основной частоте вынужденных колебаний;
k - индекс частотной составляющей сигнала s(n), преобразованного в соответствии с прямым дискретным преобразованием Фурье;
Ak - вещественная амплитуда k-го сигнала s(n), преобразованного в соответствии с прямым дискретным преобразованием Фурье;
ƒminB - минимальное значение основной частоты вынужденных колебаний детали привода в интервале Т;
ƒmaxВ - максимальное значение основной частоты вынужденных колебаний детали привода в интервале Т;
N - заданное число дискретных значений сигналов s(n) и f(n);
F - заданная частота дискретизации сигналов s(n) и f(n).
| СИСТЕМА СБОРА ДАННЫХ, КОНТРОЛЯ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АГРЕГАТОВ ПРИВОДА ВИНТОВ ВЕРТОЛЕТА И ЭЛЕКТРОННЫЙ БЛОК | 2012 |
|
RU2519583C2 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2012 |
|
RU2499240C1 |
| Способ диагностики механизмов, агрегатов и машин на основе оценки микровариаций вращения вала | 2016 |
|
RU2626388C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДЕТАЛЕЙ, УЗЛОВ И ПРИВОДНЫХ АГРЕГАТОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2379645C2 |
| Замок для соединения смежных щитов разборно-переставной мелкощитовой опалубки | 1986 |
|
SU1444491A1 |
| US 6687596 B2, 03.02.2004. | |||

