Изобретение относится к области эксплуатации вооружения и военной техники и может быть использовано для определения возможности дальнейшей эксплуатации зенитной ракеты на основе автоматизированного учета израсходованного технического ресурса и численных значений параметров бортовой аппаратуры зенитной ракеты.
Известен способ определения возможности дальнейшей эксплуатации зенитной ракеты (ЗР) на основе учета информации о состоянии бортовой аппаратуры ЗР, а именно за счет учета величины израсходованного технического ресурса и величин параметров бортовой аппаратуры ЗР [1]. Этот способ учитывает тот факт, что при проведении проверок ЗР на автоматизированной контрольно-измерительной передвижной станции (АКИПС) или при нахождении ЗР на боевых машинах (БМ) или пусковых установках (ПУ) после поступления на бортовую аппаратуру ЗР напряжений источников питания происходит выработка установленного (ограниченного допустимыми значениями) технического ресурса, т.е. ресурса нахождения бортовой аппаратуры ЗР во включенном состоянии [1]. Способ заключается в том, что для определения израсходованного технического ресурса, а в конечном итоге - для определения возможности дальнейшей эксплуатации ЗР, после i-го включения бортовой аппаратуры ракеты (БАР) в момент поступления на нее питающих напряжений оператором БМ, ПУ или АКИПС с помощью часов фиксируется момент времени t1i i-го включения БАР, а после выключения (снятия) напряжений питания - момент времени t2i i-го выключения БАР (где i - номер включения БАР с начала эксплуатации ЗР). Затем вычисленная интеллектом оператора величина i-го интервала времени нахождения БАР во включенном состоянии Δti=t2i-t1i вручную заносится оператором (записывается рукописным образом) для хранения в формуляр ЗР в раздел «эксплуатация изделия» в графу «наработка». Далее оператор суммирует полученный интервал времени Δti с величиной времени израсходованного технического ресурса Титр(i-1) за весь период эксплуатации ЗР, которое было записано последним при (i-1)-й записи в формуляре ЗР в графе «наработка с нарастающим итогом».
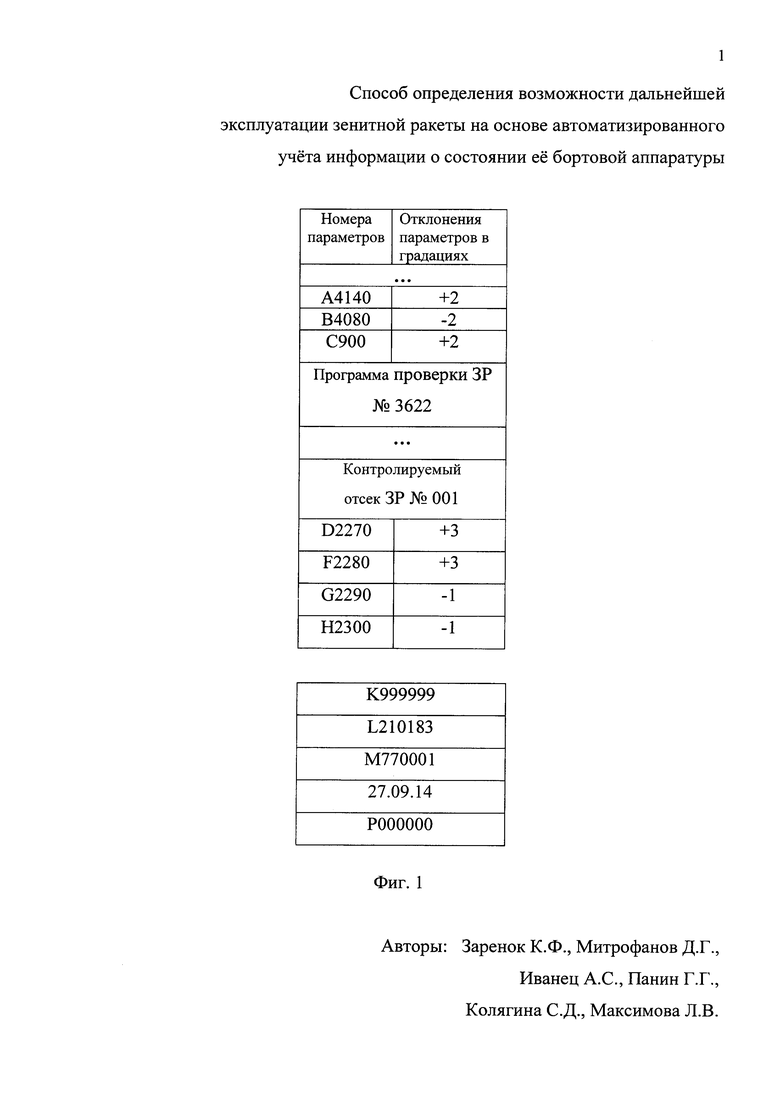
В случае проведения полноценного технического освидетельствования ЗР, которое заключается в проверке параметров составных частей ЗР с помощью АКИПС, наряду с оценкой величины ИТР Титр, в соответствии с порядком и методикой проверки ЗР на АКИПС [2], величины контролируемых параметров (входные и выходные напряжения и электрические токи составных частей ЗР, временные показатели выполнения различного рода команд и т.п.) регистрируют в виде номеров разрядов (градаций) отклонений, т.е. определяют отклонения каждого параметра от номинального значения в относительных единицах поля допуска - градациях или разрядах (фиг. 1). На фиг. 1 обозначены: А4140, В4080, С900, D2270, F2280, G2290, Н2300 - номера контролируемых параметров; +3, +2, -2, -1 - номера отклонений градаций параметров (величины отклонений с точностью до градаций); K999999 - ЗР исправна; L210183 - последние семь символов номера ЗР; М770001 - номер АКИПС; 27.09.14 - число, месяц, год проверки (27 сентября 2014 года); Р000000 - конец служебной информации. Общее число градаций, как вариант, может составлять - 18: десять в поле допуска (+1, +2, +3, +4, +5, -1, -2, -3, -4, -5), восемь - за полем допуска (+6, +7, +8, +9, -6, -7, -8, -9). Все градации являются равнодиапазонными.
Сравнивают установленные (измеренные) отклонения контролируемых параметров с допустимыми значениями, установленными эксплуатационной документацией, и в случае выхода величин параметров, а точнее их отклонений в градациях за пределы установленных допусков принимают решение о прекращении дальнейшей эксплуатации ЗР, в противном случае - принимают решение о возможности дальнейшей эксплуатации ЗР. Окончательное решение о возможности дальнейшей эксплуатации ЗР принимают только в том случае, если и Титр<Тдоп и величины контролируемых параметров находятся в допуске.
Недостатками данного способа являются:
- неточность определения (с помощью часов) времени Δti, и как следствие - величины Титр, т.е. суммарного времени нахождения ЗР с включенной бортовой аппаратурой за весь период эксплуатации ЗР. Неточность является следствием того, что интеллект операторов при боевой работе обращен в сторону решения задач по подготовке образца вооружения к боевой работе, проведению функционального контроля, поиску и обнаружению воздушных объектов противника, взятию их на автоматическое сопровождение, определению государственной принадлежности объектов и т.д. Иными словами, в период функционирования БАР в состоянии состыковки с АКИПС, БМ и ПУ, после автоматизированной постановки ЗР на предпусковую (стартовую) подготовку к применению или в период проведения технического освидетельствования ЗР операторы заняты выполнением более важных задач, чем фиксация интервала времени нахождения БАР во включенном состоянии. Поэтому Δti и Титр определяются весьма приближенным образом;
- отсутствие информации о численных значениях контролируемых параметров (фиг. 1). В связи с этим отсутствует возможность выявления изменений в значениях контролируемых параметров ЗР на разных этапах эксплуатации ЗР, а значит отсутствует возможность прогноза состояния БАР в обозримом будущем. Иначе говоря, невозможно определить факт нахождения ЗР в состоянии условной пригодности к дальнейшей эксплуатации при приближении величин одного или нескольких контролируемых параметров к границам допустимых значений.
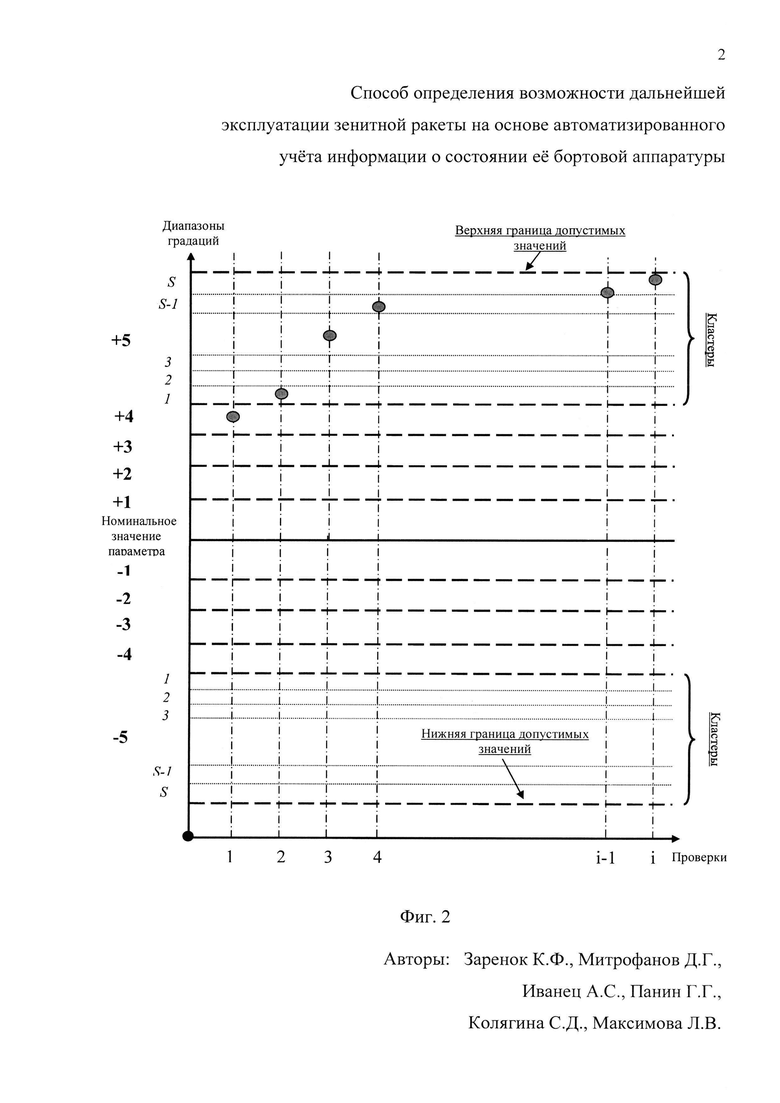
Под состоянием условной пригодности ЗР к дальнейшей эксплуатации будем понимать такое ее состояние, при котором значения контролируемых параметров бортовой аппаратуры (после очередной i-й проверки) находятся в диапазонах крайних (из допустимых) градаций (фиг. 2), и по мере проведения проверок или включений бортовой аппаратуры приближаются к границам допустимых значений параметров.
Технической документацией определено, что после выработки установленного технического ресурса эксплуатация ЗР прекращается [1, 2]. Вследствие неточного измерения Δti происходит неточное определение Титр, и в результате невозможно принять обоснованное решение о продлении сроков эксплуатации ЗР, особенно когда технический ресурс ЗР подходит к пределу. А это в конечном итоге влияет на объем финансовых и материальных средств по обеспечению подразделений и воинских частей зенитными ракетами, так как, зная точное значение Титр и состояние БАР, можно обоснованно проводить дальнейшую эксплуатацию ЗР вместо замены ее новой. Такое решение задачи по обеспечению войск зенитными ракетами может существенно сократить расходы предприятий военной промышленности, т.е. обеспечить экономию военных расходов при производстве новых партий ракет.
Для определения возможности дальнейшей эксплуатации ЗР на основе автоматизированного расчета ИТР путем суммирования величин всех интервалов нахождения БАР во включенном состоянии с начала эксплуатации ЗР и учета численных значений параметров БАР, необходимо знать точные значения i-x интервалов времени нахождения ракеты с включенной БАР Δti=t2i-t1i для последующего сравнения значений Титр и Тдоп. Кроме того желательно контролировать (определять) динамику изменения численных значений контролируемых параметров ЗР при ее эксплуатации, а именно - определять факт нахождения ЗР в состоянии условной пригодности к дальнейшей эксплуатации при приближении величины одного или нескольких контролируемых параметров к граничным (предельным) значениям крайних градаций, допускающих эксплуатацию ЗР. В результате такого контроля появится возможность своевременно предупреждать (предсказывать) ожидаемые отказы БАР и принимать более достоверные и обоснованные решения о возможности дальнейшей эксплуатации ЗР, о прекращении ее эксплуатации, либо о переводе ЗР в состояние условной пригодности к дальнейшей эксплуатации.
Из изложенного выше следует, что информация о значениях ИТР и величинах отклонений контролируемых параметров позволяет недостаточно точно, а порой и ошибочно оценивать техническое состояние ЗР и, следовательно, не позволяет грамотно планировать ее эксплуатацию и применение. В итоге получаемая вышеизложенным способом информация не позволяет экономно использовать материальные и финансовые средства (выделяемые на изготовление новых ракет) за счет получения достоверных сведений о состоянии БАР и тенденциях изменения ее состояния при определении возможности продления назначенного срока службы ЗР.
Задачей изобретения является придание известному способу определения возможности дальнейшей эксплуатации ЗР по результатам автоматизированного учета состояния БАР способности принятия более достоверного и обоснованного решения на основе учета точной величины ИТР и способности определять факт нахождения ЗР в состоянии условной пригодности к дальнейшей эксплуатации при приближении величины одного или нескольких параметров БАР к предельным границам допустимых значений.
Для выполнения поставленной задачи в ходе реализации способа предлагается разделить самые удаленные от номинальной величины параметра диапазоны допустимых градаций (их для каждого параметра два в зависимости от направления отклонения параметра от номинала) на S (S=10…20) смежных равнодиапазонных кластеров, что позволит наиболее точно отслеживать тенденции приближения величин контролируемых параметров к предельному S-му кластеру, примыкающему к границе допустимых значений контролируемого параметра. Например, если имеется всего 10 допустимых градаций ±1; ±2; ±3; ±4; ±5, то самыми удаленными градациями будут признаны градации +5 и -5. Градация +5 своим верхним пределом будет примыкать к верхней границе допустимых значений, а нижняя граница градации -5 будет совпадать с нижней границей допустимых значений (фиг. 2). Тогда деление градации на S смежных кластеров приведет к тому, что крайний по отношению к номинальному значению параметра кластер будет примыкать к границе допустимых значений, а первый кластер будет граничить с четвертой градацией.
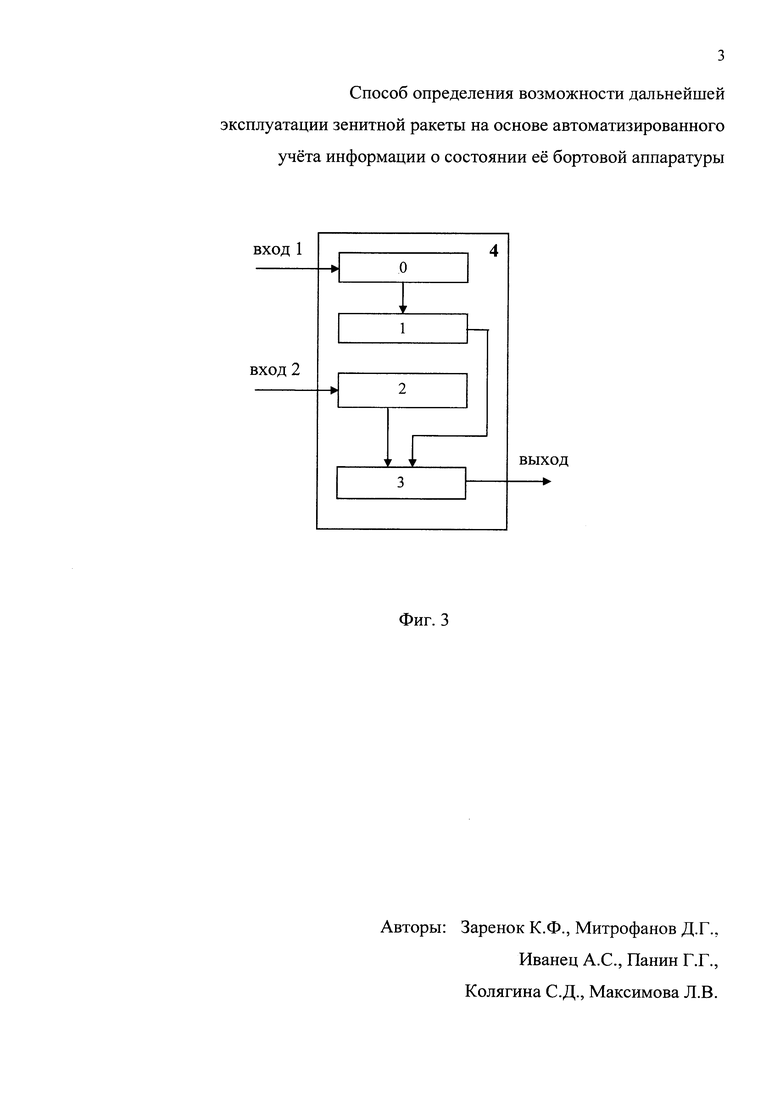
Для контроля величин параметров ЗР, предлагается дополнительно использовать электронное устройство (ЭУ), имеющее вид флеш-карты, которое перед началом очередного (каждого) использования ЗР следует подключать параллельно с помощью дополнительного шлейфа и индивидуального разъема Ш1 к кабелю, посредством которого осуществляется подача питающих напряжений на БАР. Предлагаемое (фиг. 3) ЭУ 4 конструктивно состоит из формирователя импульсов 0, счетчика импульсов 1, преобразователя 2 и блока памяти 3. Примером устройства, имеющего подобную структурную схему, является электронный счетчик учета расхода и прогнозирования остаточного ресурса электромеханических устройств [3]. Предлагаемая структурная схема отличается от представленной в [3] тем, что в нее не входит блок управления, сумматор и таймер. Кроме того, не предусмотрен блок питания, а роль индикатора предлагается поручить внешней ЭВМ. Работа ЭУ 4 реализуется следующим образом (фиг. 3). При поступлении на ЗР напряжений источников питания часть питающих напряжений с помощью параллельно подключаемого дополнительного шлейфа и индивидуального разъема будет поступать на вход 1 ЭУ 4. Вход 1 является одновременно входом формирователя импульсов 0. Формирователь импульсов 0 автоматически осуществляет преобразование входного напряжения в импульсы, количество которых пропорционально длительности поступления напряжения. С выхода формирователя импульсов 0 импульсы поступают на вход счетчика импульсов 1, в котором осуществляется подсчет количества импульсов пропорционального длительности поступления напряжения питания, в течение которого ЗР находится во включенном состоянии при i-м включении. С выхода счетчика импульсов 1 сигнал поступает на блок памяти 3, в котором осуществляется хранение данной информации в цифровом виде. Блок памяти 3 осуществляет хранение информации о длительности работы ЗР при каждом i-м включении БАР с момента начала эксплуатации ЗР. Всякий раз после отключения источников питания ЭУ 4 отсоединяют от индивидуального разъема Ш1 и подключают к внешней ЭВМ, в которой с помощью специального программного обеспечения осуществляется сложение полученного интервала времени Δti (израсходованного технического ресурса в течение очередной i-й проверки) с предшествующими интервалами нахождения БАР во включенном состоянии за весь период эксплуатации ЗР. Полученные результаты сохраняют в блоке памяти 3 ЭУ 4, а также вписывают в формуляр на ЗР.
С помощью ЭУ 4 предлагается с точностью, определяемой временем его реакции, фиксировать интервал времени Δti нахождения ЗР с включенной БАР при каждом i-м цикле боевого или учебного использования ЗР или при проверке ЗР на АКИПС. Расчет величины ИТР с помощью специального программного обеспечения, установленного во внешней ЭВМ, предлагается производить по формуле

где N - общее число включений БАР; Δti=t2i-t1i - длительность интервала работы БАР при i-м включении, хранящаяся в блоке памяти 3 ЭУ 4; i - номер включения БАР; t1i - время начала работы БАР при i-м включении; t2i - время окончания работы БАР при i-м включении (время снятия питающих напряжений).
Другими словами, с помощью внешней ЭВМ производится суммирование зафиксированного при i-м включении БАР интервала времени Δti (израсходованного технического ресурса в течение очередной проверки) с предшествующими интервалами нахождения БАР во включенном состоянии. Кроме того с помощью монитора внешней ЭВМ предлагается осуществлять визуальный контроль информации об ИТР ЗР, соответствующем ее использованию с момента начала эксплуатации ЗР. Полученный результат, а именно численное значение израсходованного технического ресурса Титр предлагается регистрировать в блоке памяти 3 ЭУ 4, а также вписывать в формуляр на ЗР, а затем с помощью программного обеспечения внешней ЭВМ сравнивать с допустимым значением Тдоп, хранящимся в памяти ЭВМ или в памяти ЭУ 4. При Титр<Тдоп следует принимать решение о возможности дальнейшей эксплуатации ЗР, а в случае Титр≥Тдоп следует принимать решение о прекращении ее эксплуатации.
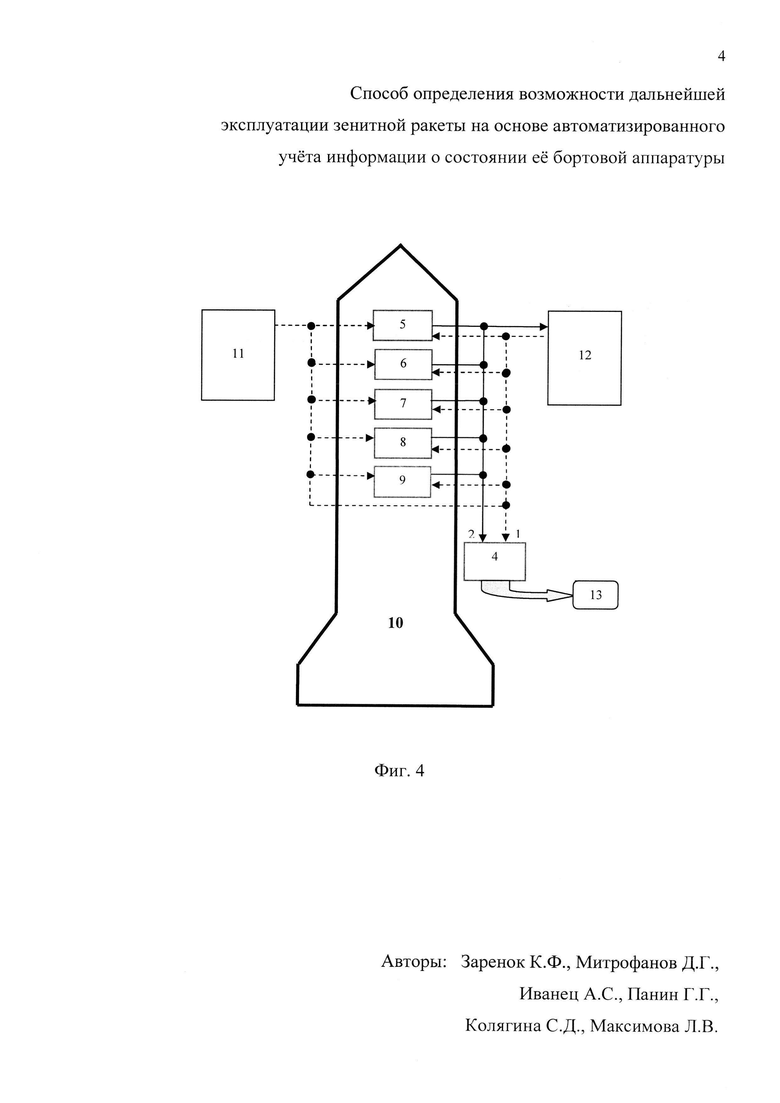
При проверке величин контролируемых параметров БАР с помощью АКИПС предлагается аналогичным образом предварительно подключать через разъем Ш1 вход 1 ЭУ 4 к кабелю, с помощью которого осуществляется подача питающих напряжений, формируемых в АКИПС, на ЗР. Кроме того, вход 2 ЭУ 4 предлагается также, с помощью дополнительного шлейфа и индивидуального разъема Ш1 подключать к кабелю, посредством которого с ЗР на АКИПС поступают сигналы, соответствующие значениям контролируемых параметров (фиг. 4). На фиг. 4 использованы следующие обозначения: радиолокационная головка самонаведения 5, автопилот 6, радиовзрыватель 7, предохранительно-исполнительный механизм 8, турбогенераторный источник питания 9, ЗР 10, боевое средство комплекса 11, АКИПС 12, внешняя ЭВМ 13, пунктирные линии - питание, управляющие команды и сигналы; сплошные линии - пути прохождения информации о величине контролируемых параметров.
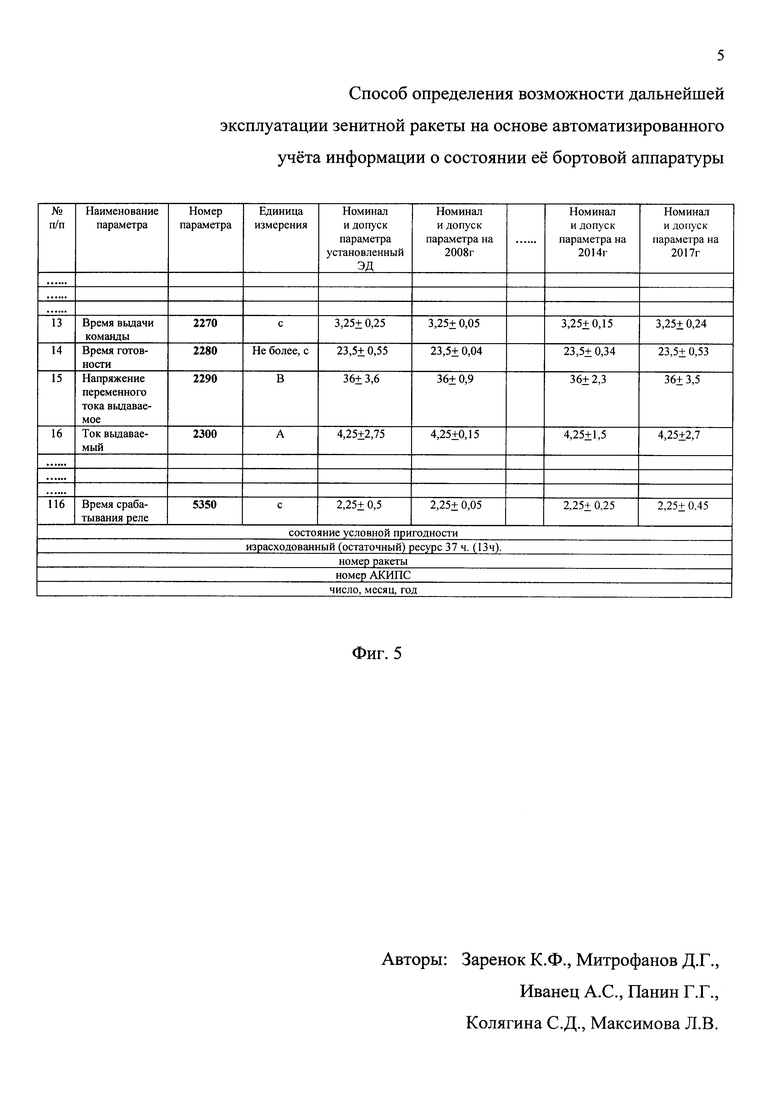
Во время проведения проверки БАР результаты автоматического контроля, а именно, точные зафиксированные численные значения контролируемых параметров (до перевода в номера градаций) передаются с БАР на специальную цифровую вычислительную машину (СЦВМ) из состава АКИПС 12. Одновременно значения контролируемых параметров (фиг. 2), в виде аналоговых сигналов, поступают на вход 2 ЭУ 4 (фиг. 3), который является входом преобразователя 2, с выхода которого в значения параметров цифровом виде поступают на вход блока памяти 3. Проверки параметров ЗР проводятся последовательно, поэтому значения параметров поступают также последовательно. Предлагается в блоке памяти 3 ЭУ 4 регистрировать численные значения контролируемых параметров (до перевода в номера градаций), т.е. сохранять значения контролируемых параметров после каждой i-й проверки. Проверки проводят в соответствии с требованиями эксплуатационной документации (например, каждые три года). По окончании проверок после выключения БАР ЭУ 4 предлагается отсоединять от индивидуального разъема Ш1. Для получения информации о численных значениях контролируемых параметров ЗР 10 предлагается подключать ЭУ 4 к внешней ЭВМ 13. После этого численные значения контролируемых параметров предлагается распечатывать на принтере, который подключают к ЭВМ 13, и прикреплять распечатанные листы (фиг. 5) к формуляру на ЗР 10. Предлагается с помощью специального программного обеспечения внешней ЭВМ 13 не только проводить сравнение величин контролируемых параметров с допустимыми значениями, но и дополнительно анализировать динамику отклонений контролируемых параметров за весь период эксплуатации ракеты, а именно отслеживать приближение значений хотя бы одного из контролируемых параметров к граничным (предельным) значениям (попадание в S-й кластер) крайних допустимых градаций. Отслеживание приближения величины контролируемого параметра к граничным значениям предлагается осуществлять путем, например, фиксации переходов величин параметра по мере проведения проверок из одних кластеров в другие (из кластеров с меньшими номерами в кластеры с большими номерами), достигая предельного S-го кластера. После каждого проведения технического освидетельствования ЗР предлагается регистрировать численные значения отклонений контролируемых параметров в блоке памяти 3 ЭУ 4, внешней ЭВМ 13 и в формуляре ЗР. Как указывалось выше для выявления тенденции приближения контролируемых параметров к границе допустимых значений предлагается разделить крайние верхнюю и нижнюю градации отклонений параметров БАР на S смежных равно-диапазонных кластеров (например, S=10…20), причем S-м кластером считать предельный допустимый диапазон значений крайней градации определенного контролируемого параметра ЗР. Например, на фиг. 2 крайней градацией будет пятая. Предлагается выявлять такие контролируемые параметры БАР, отклонения которых от проверки к проверке приближаются к предельному S-му кластеру и в итоге заходят в его диапазон в одной из крайних градаций (фиг. 2). В случае выявления таких отклонений контролируемых параметров, небезосновательным является предположение, что во время следующего использования ЗР значения отклонений параметра (параметров) могут выйти за пределы S-го кластера (за пределы допустимых значений) и, как следствие, ЗР будет квалифицироваться как неисправная. В таком случае предлагается переводить ЗР в категорию (состояние) условно пригодных к эксплуатации ЗР.
На фиг. 2 в качестве примера показано состояние БАР, а именно изменение значения отклонения одного из контролируемых параметров, в зависимости от проведения проверок ЗР (всего проведено i проверок ЗР). Из примера следует, что значение параметра (от проверки 1 к проверке i) приближается к верхней границе допустимых значений (при i-й проверке значение параметра входит в диапазон значений S-го кластера градации +5). В данном случае можно обоснованно предположить, что при проведении (i+1)-й проверки ЗР значение контролируемого параметра выйдет за пределы верхней границы допустимых значений. В такой ситуации принимается небезосновательное решение о переводе ЗР в категорию условно пригодных к эксплуатации ракет.
По результатам сравнения величин контролируемых параметров с допустимыми значениями и по результатам анализа динамики отклонений контролируемых параметров за весь период эксплуатации ЗР появляется возможность принятия более обоснованного решения о возможности дальнейшей эксплуатации ЗР, о прекращении ее эксплуатации, либо о переводе ЗР в категорию условно пригодных к эксплуатации ракет.
Таким образом, усовершенствованный способ определения возможности дальнейшей эксплуатации ЗР на основе автоматизированного учета информации о состоянии БАР будет заключаться в получении и сохранении в блоке памяти 3 ЭУ 4 и в формуляре ЗР более достоверных данных о суммарном времени нахождения ЗР с включенной БАР, а также данных об абсолютных величинах контролируемых параметров БАР, выявленных в ходе каждой очередной проверки, с последующим сравнением этих данных с допустимыми значениями и с последующим проведением анализа динамики отклонений контролируемых параметров за весь период эксплуатации ЗР в интересах принятия решения о дальнейшей эксплуатации ЗР, о прекращении ее эксплуатации, либо о переводе ЗР в категорию условно пригодных к эксплуатации ЗР.
Существует множество вариантов электронных устройств, которые используют для учета и хранения информации о значениях технического ресурса различного рода электронных изделий. Примером одного из них является электронный счетчик учета расхода и прогнозирования остаточного ресурса электромеханических устройств [3]. Этот счетчик позволяет определять количество включений контролируемого устройства, время его работы за каждый цикл и производит подсчет остаточного ресурса.
Более детально внутреннее содержание предлагаемого способа определения возможности дальнейшей эксплуатации ЗР на основе автоматизированного учета информации о состоянии ее бортовой аппаратуры, а именно определения ИТР ЗР, заключается в следующем. В начальный момент времени перед началом каждого очередного использования ЗР к кабелю, с помощью которого осуществляется подача питающих напряжений на ЗР параллельно подключают ЭУ 4. Для этого используют заблаговременно параллельно подключенный дополнительный шлейф и индивидуальный разъем Ш1. В соответствии с режимом и способом применения ЗР на БАР подают питающее напряжение. Параллельно через дополнительный шлейф и индивидуальный разъем Ш1 это напряжение поступает на вход 1 ЭУ 4. Вход 1 ЭУ 4 (фиг. 2) является одновременно входом формирователя импульсов 0. Формирователь импульсов 0 автоматически осуществляет преобразование входного напряжения в импульсы, количество которых пропорционально длительности поступления напряжения. С выхода формирователя импульсов 0 импульсы поступают на вход счетчика импульсов 1, в котором осуществляется подсчет количества импульсов пропорционального длительности поступления напряжения питания, в течение которого ЗР находится во включенном состоянии при i-м включении. С выхода счетчика импульсов 1 сигнал поступает на блок памяти 3, в котором осуществляется хранение данной информации в цифровом виде. Блок памяти 3 осуществляет запись информации о длительности работы ЗР при каждом включении БАР в течение всего периода эксплуатации ЗР. При снятии с ЗР питающих напряжений ЭУ прекращает запись информации, т.е. фактически прекращает работу. Всякий раз после отключения от ЗР источников питания ЭУ отсоединяют от индивидуального разъема Ш1. Затем ЭУ подключают к внешней ЭВМ, в которой с помощью специального программного обеспечения осуществляется сложение полученного интервала времени Δti (израсходованного технического ресурса в течение очередной i-й проверки или i-го использования ЗР) с предшествующими интервалами нахождения БАР во включенном состоянии за весь период эксплуатации ЗР по формуле  . Кроме этого с помощью монитора внешней ЭВМ осуществляют визуальный контроль информации об ИТР ЗР, соответствующем ее использованию с момента начала эксплуатации ЗР. Полученный результат, а именно численное значение израсходованного технического ресурса Титр с помощью специального программного обеспечения внешней ЭВМ сравнивают с допустимым значением Тдоп, хранящимся в памяти внешней ЭВМ или в памяти ЭУ. В итоге при Титр<Тдоп принимают решение о возможности дальнейшей эксплуатации ЗР, а в случае Титр≥Тдоп принимают решение о прекращении ее эксплуатации.
. Кроме этого с помощью монитора внешней ЭВМ осуществляют визуальный контроль информации об ИТР ЗР, соответствующем ее использованию с момента начала эксплуатации ЗР. Полученный результат, а именно численное значение израсходованного технического ресурса Титр с помощью специального программного обеспечения внешней ЭВМ сравнивают с допустимым значением Тдоп, хранящимся в памяти внешней ЭВМ или в памяти ЭУ. В итоге при Титр<Тдоп принимают решение о возможности дальнейшей эксплуатации ЗР, а в случае Титр≥Тдоп принимают решение о прекращении ее эксплуатации.
Для определения параметров контролируемых технических изделий и устройств существуют различные варианты электронных устройств. Примерами являются:
1. Устройство для определения параметров антенны [4]. Технический результат заключается в автоматизации измерений и одновременного определения коэффициента усиления и эффективной площади поверхности антенны в широкой полосе частот.
2. Устройство для измерения активного, реактивного и полного сопротивления и электрических характеристик [5]. С его помощью определяют сопротивления заземляющего устройства и его составляющие: разность потенциалов, значения тока и др.
В предлагаемом способе для определения значений контролируемых параметров ЗР, перед началом технического освидетельствования ЗР, с помощью параллельно подключаемого шлейфа и индивидуального разъема Ш1, заблаговременно, подключают вход 1 ЭУ к кабелю, с помощью которого осуществляется подача питающих напряжений на ЗР, а вход 2 к кабелю, посредством которого с ЗР на АКИПС поступают сигналы, соответствующие значениям контролируемых параметров. А именно: с одной стороны шлейф подключают к разъему для соединения с ЭУ, а с другой - раздвоенный шлейф подключают одной частью к кабелю, с помощью которого осуществляется подача питающих напряжений на ЗР, а другой частью - к кабелю, посредством которого с ЗР на АКИПС поступают сигналы, соответствующие значениям контролируемых параметров. Во время проведения проверок ЗР с помощью АКИПС результаты автоматического контроля, а именно точные зафиксированные численные значения контролируемых параметров с БАР до перевода в номера градаций передаются на СЦВМ из состава АКИПС. Одновременно значения контролируемых параметров (фиг. 2) в виде аналоговых сигналов по шлейфу поступают через индивидуальный разъем Ш1 на вход 2 ЭУ 4 (фиг. 3) который является входом преобразователя 2, с выхода которого значения параметров в цифровом виде поступают на вход блока памяти 3, в котором происходит регистрация информации, т.е. осуществляется хранение значений контролируемых параметров, получаемых в ходе каждой проверки ЗР с помощью АКИПС. Значения контролируемых параметров поступают последовательно по мере прохождения проверок и не оказывают взаимного мешающего воздействия. По окончании проверки ЗР ЭУ отсоединяют от ЗР. Затем ЭУ подключают к внешней ЭВМ и при помощи принтера распечатывают значения контролируемых параметров ЗР. Полученные распечатанные листы с датой проверки и со значениями контролируемых параметров прикрепляют к формуляру на ЗР. Кроме того сохраняют значения контролируемых параметров ЗР в памяти ЭУ. С помощью программного обеспечения ЭВМ сравнивают вхождение величин контролируемых параметров в установленные эксплуатационной документацией интервалы допуска и анализируют динамику отклонений контролируемых параметров за весь период эксплуатации ЗР. Если с течением времени значения хотя бы одного из контролируемых параметров по мере эксплуатации ракеты приближаются к граничным значениям крайних допустимых градаций, а именно если отклонения любого из контролируемых параметров приближаются к предельному S-му кластеру и заходят в него в одном из диапазонов крайних градаций, т.е. при наличии тенденции удаления хотя бы одного из контролируемых параметров от номинального значения по мере проведения проверок бортовой аппаратуры и нахождения при последней проверке значения этого параметра в S-м кластере, следует обоснованно предполагать, что при одном из очередных применений ЗР значения параметра (параметров) могут выйти за допустимые пределы. При этом ЗР необходимо будет квалифицировать как неисправную. Это определяет необходимость перевода такой ЗР в категорию (состояние) условно пригодных к эксплуатации ракет.
По результатам сравнения контролируемых параметров с допустимыми значениями и результатам анализа динамики отклонений контролируемых параметров по мере эксплуатации ЗР принимается решение о возможности дальнейшей эксплуатации ЗР, о прекращении ее эксплуатации, либо о переводе ЗР в категорию условно пригодных к эксплуатации ракет.
Из вышеизложенного следует, что все данные, которые хранятся в блоке памяти 3 ЭУ и в формуляре ЗР, а именно Титр - величина ИТР ЗР, Тдоп - допустимая величина ИТР ЗР, установленная правилами эксплуатации, а также численные значения контролируемых параметров составных частей ЗР (фиг. 5) анализируют, т.е. сравнивают полученное значение ИТР с имеющимся допустимым значением Тдоп, определяют вхождение значений контролируемых параметров в диапазоны допуска, анализируют динамику отклонений контролируемых параметров за весь период эксплуатации ЗР и принимают решение о возможности дальнейшей безаварийной эксплуатации ЗР, о прекращении ее эксплуатации, либо о переводе ракеты в категорию условно пригодных к эксплуатации ракет. Очевидно, что ЗР попавшие в категорию условно пригодных не подлежат дальнейшему типовому использованию. Поэтому, при проведении учений целесообразно производить отстрел таких ракет в первую очередь, использовать их в качестве опытных образцов при научных исследованиях, применять их исправные элементы в качестве запасных во время проведения ремонтно-восстановительных работ, и т.п., т.е. использовать всевозможными способами именно те ЗР, возможность длительной эксплуатации которых находится под сомнением.
Наличие информации о состоянии БАР (фиг. 5), полученной на основе предлагаемого способа, позволяет принимать более обоснованные решения о продлении назначенных сроков службы зенитных ракет. Кроме того появляется возможность экономно использовать материальные и финансовые средства, выделяемые на изготовление и ремонт зенитных ракет. Подобная информация полезна не только для представителей воинских частей и подразделений, но и для представителей военной промышленности.
Источники информации
1. Садыхов Г.С. Остаточный ресурс объектов и методы его оценки / Г.С. Садыхов. - М: Знание, 1986. - 98 с.
2. Методические указания по проведению регламентированного технического обслуживания ракет на арсеналах комплексного хранения, базах и складах ракет и боеприпасов. ГРАУ МО РФ, 2015.
3. Москович И.А., Колос B.C., Кодык А.Д. Электронный счетчик учета расхода и прогнозирования остаточного ресурса электромеханических устройств, ЗАО «Инженерный центр». Патент РФ №41897, 2004.
4. Малышев И.И., Сошников Э.Н. Устройство для определения параметров антенны. Патент РФ №2139548, 1995.
5. Кандаев В.А., Авдеева К.В., Зуб К.С. Омский государственный университет путей сообщения. Устройство для измерения активного, реактивного и полного сопротивления и электрических характеристик. Патент РФ №2491557, 2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| СПОСОБ ДЛИТЕЛЬНОГО ХРАНЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ СРЕДНЕЙ ДАЛЬНОСТИ И ДАЛЬНЕГО ДЕЙСТВИЯ В ЗАГЛУБЛЕННЫХ ШАХТАХ | 2015 |
|
RU2598958C1 |
| Способ проверки зенитных ракет и пусковых установок | 2017 |
|
RU2674453C1 |
| СПОСОБ ЛОКАЛЬНОГО КОНТРОЛЯ И УЧЕТА ТЕПЛОПОТРЕБЛЕНИЯ | 1995 |
|
RU2105958C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2137682C1 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ СИСТЕМЫ ВООРУЖЕНИЙ И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475696C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2012 |
|
RU2497082C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ С МУЛЬТИПЛЕКСНОЙ СИСТЕМОЙ ИНФОРМАЦИОННОГО ОБМЕНА | 2001 |
|
RU2174485C1 |
Изобретение относится к способу определения возможности дальнейшей эксплуатации ракеты. Для определения возможности дальнейшей эксплуатации ракеты проводят множество проверок ракеты на автоматизированной контрольно-измерительной передвижной станции или на боевых машинах или пусковых установках, вычисляют величину суммарного израсходованного технического ресурса за весь период эксплуатации ракеты, анализируют динамику отклонений, сравнивают полученное значение с допустимой величиной, принимают решение о прекращении эксплуатации ракеты при превышении допустимой величины. Обеспечивается повышение достоверности способа определения пригодности ракеты к дальнейшей эксплуатации. 5 ил.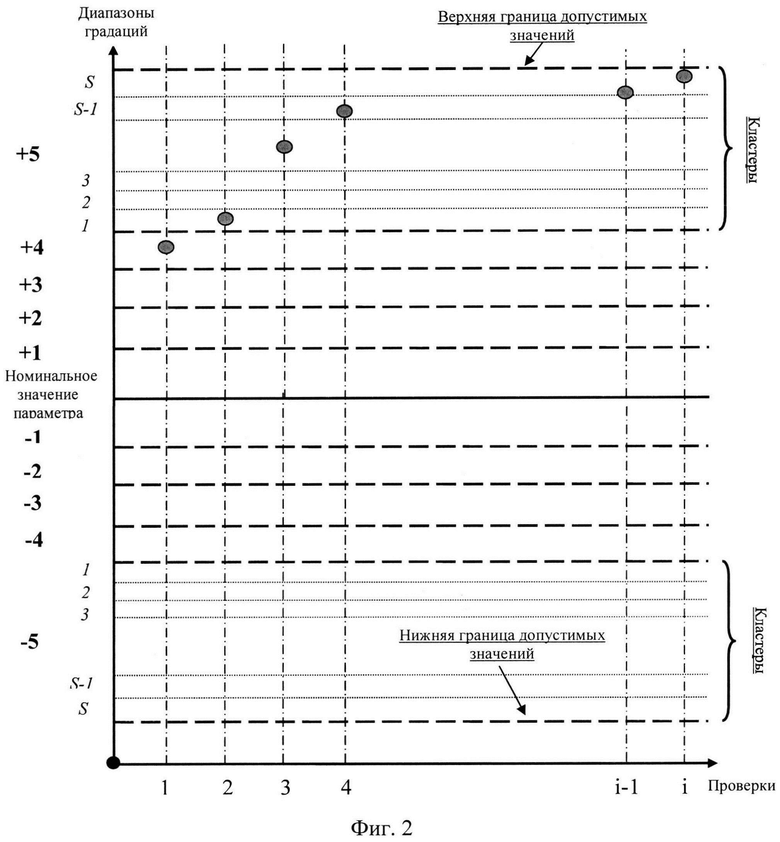
Способ определения возможности дальнейшей эксплуатации ракеты на основе автоматизированного учета информации о состоянии ее бортовой аппаратуры, заключающийся в том, что при проведении проверки зенитной ракеты на автоматизированной контрольно-измерительной передвижной станции или при нахождении зенитной ракеты на боевых машинах или пусковых установках после очередного i-го периода нахождения зенитной ракеты в состоянии с включенной бортовой аппаратурой вычисленное значение i-го интервала времени Δti нахождения зенитной ракеты с включенной бортовой аппаратурой по формуле Δti=t2i-t1i, где t2i - момент времени выключения бортовой аппаратуры зенитной ракеты при i-м использовании; t1i - момент времени включения бортовой аппаратуры зенитной ракеты при i-м использовании, записывают рукописным образом в формуляр зенитной ракеты, предполагая, что Δti является очередной i-й частью израсходованного технического ресурса зенитной ракеты; вычисляют величину суммарного израсходованного технического ресурса Tитр за весь период эксплуатации зенитной ракеты, учитывающую все включения бортовой аппаратуры с 1-го по i-e, и результат сложения Tитр записывают рукописным образом в формуляр зенитной ракеты; сравнивают рассчитанное значение израсходованного технического ресурса Титр с установленной правилами эксплуатации допустимой величиной израсходованного технического ресурса Тдоп, в случае Титр<Тдоп принимают решение о возможности дальнейшей эксплуатации зенитной ракеты, при Tитр≥Тдоп принимают решение о прекращении эксплуатации зенитной ракеты; кроме того, при проведении технического освидетельствования зенитной ракеты, которое заключается в измерении величин контролируемых параметров зенитной ракеты с помощью автоматизированной контрольно-измерительной передвижной станции, данные о величинах контролируемых параметров зенитной ракеты заносят в формуляр на зенитную ракету, причем величины отклонений контролируемых параметров от номинального значения измеряют в номерах равнодиапазонных градаций, когда большему отклонению параметра от номинального значения соответствует больший номер градации, а направление отклонения учитывают знаком перед номером градации, например -5, -4, -3, -2, -1, +1, +2, +3, +4, +5, а крайними градациями считают градации с наибольшими по модулю номерами, сравнивают значения величин контролируемых параметров с допустимыми значениями и в случае, если величины контролируемых параметров не выходят за пределы допустимых значений, принимают решение о возможности дальнейшей эксплуатации зенитной ракеты, в противном случае принимают решение о прекращении эксплуатации зенитной ракеты, отличающийся тем, что для контроля времени нахождения зенитной ракеты с включенной бортовой аппаратурой, т.е. нахождения бортовой аппаратуры зенитной ракеты под воздействием питающих напряжений, дополнительно используют электронное устройство в виде флеш-карты, которое перед началом каждого использования зенитной ракеты с помощью дополнительного шлейфа и индивидуального разъема подключают параллельно к кабелю, посредством которого осуществляется подача питающих напряжений на бортовую аппаратуру ракеты, обеспечивая подвод к электронному устройству напряжений источников питания, являющихся частью питающих напряжений бортовой аппаратуры зенитной ракеты; с помощью электронного устройства фиксируют и сохраняют в блоке памяти электронного устройства значение интервала времени Δti нахождения зенитной ракеты с включенной бортовой аппаратурой при i-м использовании зенитной ракеты, т.е. фиксируют очередную i-ю часть израсходованного технического ресурса зенитной ракеты; для нахождения итоговой величины Титр электронное устройство отключают от дополнительного шлейфа и подключают к внешней электронной вычислительной машине, в которой с помощью специального программного обеспечения суммируют величины всех временных интервалов нахождения зенитной ракеты с включенной бортовой аппаратурой, хранящихся в памяти электронного устройства по формуле , используют вычисленную величину Tитр для принятия решения о возможности дальнейшей эксплуатации зенитной ракеты либо о прекращении ее эксплуатации, при проведении проверки зенитной ракеты с помощью автоматизированной контрольно-измерительной передвижной станции заблаговременно, перед началом проверки зенитной ракеты, к кабелю, с помощью которого осуществляется подача питающих напряжений на зенитную ракету, а также к кабелю, посредством которого с зенитной ракеты на автоматизированную контрольно-измерительную передвижную станцию поступают сигналы, соответствующие значениям контролируемых параметров, с помощью дополнительного шлейфа подключают электронное устройство, с помощью которого регистрируют и сохраняют в блоке памяти электронного устройства время нахождения зенитной ракеты с включенной бортовой аппаратурой при i-м использовании зенитной ракеты, а также регистрируют и сохраняют в блоке памяти электронного устройства абсолютные численные значения контролируемых параметров бортовой аппаратуры зенитной ракеты, по окончании проверок контролируемых параметров после выключения бортовой аппаратуры зенитной ракеты для получения информации об итоговой величине израсходованного технического ресурса Tитр за весь период эксплуатации зенитной ракеты и информации о значениях контролируемых параметров бортовой аппаратуры ракеты электронное устройство подключают к внешней электронно-вычислительной машине, в которой с помощью программного обеспечения рассчитывают аналогично случаю нахождения зенитной ракеты на пусковой установке итоговую величину Tитр, для анализа динамики отклонений контролируемых параметров за весь период эксплуатации зенитной ракеты диапазоны значений крайних градаций разделяют на S смежных равно диапазонных кластеров, например S=10…20, причем S-м кластером считают кластер, одна из границ которого совпадает с дальней от номинального значения границей крайней градации, являющейся границей допустимых значений, с помощью программного обеспечения внешней электронно-вычислительной машины анализируют изменения величин контролируемых параметров путем фиксации переходов значений отклонений контролируемых параметров по мере проведения проверок зенитной ракеты из кластеров с меньшими номерами в кластеры с большими номерами, при наличии тенденции удаления хотя бы одного из контролируемых параметров от номинального значения по мере проведения проверок бортовой аппаратуры и нахождения при последней проверке значения этого параметра в S-м кластере принимают решение о переводе зенитной ракеты в категорию условно пригодных к эксплуатации зенитных ракет.
, используют вычисленную величину Tитр для принятия решения о возможности дальнейшей эксплуатации зенитной ракеты либо о прекращении ее эксплуатации, при проведении проверки зенитной ракеты с помощью автоматизированной контрольно-измерительной передвижной станции заблаговременно, перед началом проверки зенитной ракеты, к кабелю, с помощью которого осуществляется подача питающих напряжений на зенитную ракету, а также к кабелю, посредством которого с зенитной ракеты на автоматизированную контрольно-измерительную передвижную станцию поступают сигналы, соответствующие значениям контролируемых параметров, с помощью дополнительного шлейфа подключают электронное устройство, с помощью которого регистрируют и сохраняют в блоке памяти электронного устройства время нахождения зенитной ракеты с включенной бортовой аппаратурой при i-м использовании зенитной ракеты, а также регистрируют и сохраняют в блоке памяти электронного устройства абсолютные численные значения контролируемых параметров бортовой аппаратуры зенитной ракеты, по окончании проверок контролируемых параметров после выключения бортовой аппаратуры зенитной ракеты для получения информации об итоговой величине израсходованного технического ресурса Tитр за весь период эксплуатации зенитной ракеты и информации о значениях контролируемых параметров бортовой аппаратуры ракеты электронное устройство подключают к внешней электронно-вычислительной машине, в которой с помощью программного обеспечения рассчитывают аналогично случаю нахождения зенитной ракеты на пусковой установке итоговую величину Tитр, для анализа динамики отклонений контролируемых параметров за весь период эксплуатации зенитной ракеты диапазоны значений крайних градаций разделяют на S смежных равно диапазонных кластеров, например S=10…20, причем S-м кластером считают кластер, одна из границ которого совпадает с дальней от номинального значения границей крайней градации, являющейся границей допустимых значений, с помощью программного обеспечения внешней электронно-вычислительной машины анализируют изменения величин контролируемых параметров путем фиксации переходов значений отклонений контролируемых параметров по мере проведения проверок зенитной ракеты из кластеров с меньшими номерами в кластеры с большими номерами, при наличии тенденции удаления хотя бы одного из контролируемых параметров от номинального значения по мере проведения проверок бортовой аппаратуры и нахождения при последней проверке значения этого параметра в S-м кластере принимают решение о переводе зенитной ракеты в категорию условно пригодных к эксплуатации зенитных ракет.
| СПОСОБ РЕГИСТРАЦИИ И ОБРАБОТКИ ЦИФРОВОЙ ИНФОРМАЦИИ ПРИ ПРОВЕРКЕ РАКЕТЫ | 2010 |
|
RU2414669C1 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ СИСТЕМЫ ВООРУЖЕНИЙ И АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475696C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| УСТРОЙСТВО РЕГИСТРАЦИИ И ОБРАБОТКИ ИНФОРМАЦИИ ПРИ ПРОВЕРКЕ РАКЕТЫ | 2009 |
|
RU2425418C1 |
| US 5721680 A1, 24.02.1998. | |||

