Предполагаемое изобретение относится к оборонной технике, в частности к мобильным зенитным ракетным комплексам (ЗРК), в которых зенитные управляемые ракеты (ЗУР) наводятся с помощью полуактивных или активных радиолокационных головок самонаведения (РГС), и может быть использовано для организации противовоздушной обороны (ПВО) войск и военных объектов от поражения средствами воздушного нападения (СВН) вероятного противника.
В структуре современной ПВО огневая секция является основным и практически единственным средством для организации пуска и наведения ЗУР на СВН.
Известны огневые секции, например, американского ЗРК “Пэтриот”, включающие пункт боевого управления (ПБУ), многофункциональную радиолокационную станцию (МФРЛС), пусковые установки (ПУ), каждая из которых имеет N готовых к пуску ЗУР. Количество ПУ в огневой секции может быть различным [см. Ф.К.Неупокоев. Стрельба зенитными ракетами. М., Военное издательство М.О. СССР, 1980 г., стр.53; А.С.Мальгин. Управление огнем зенитных ракетных комплексов. М., Военное издательство, 1987 г., стр.21].
В огневой секции ЗРК “Пэтриот” на всем участке полета ЗУР (до встречи ЗУР с целью) реализована до захвата сигнала цели полуактивной РГС командная система телеуправления второго типа (ТУ-11), поэтому МФРЛС обеспечивает наряду с выполнением задач по сопровождению обстреливаемой цели прием информации от бортовых координаторов ЗУР, а также пересчет текущих координат цели относительно точки стояния ЗРК [В.П.Демидов, Н.Ш.Кутырев. Управление зенитными ракетами. М., Военное издательство, 1989 г., стр.295]. Это приводит к тому, что время радиолокационного контакта МФРЛС огневой секции с целью становится соизмеримым с временем полета ЗУР до цели, которое может составлять более 70-80 с, что вполне достаточно для обстрела излучающих средств огневой секции противорадиолокационными ракетами (ПРР).
Существуют также варианты боевых секций, в которых функции МФРЛС и ПУ для пуска ЗУР с полуактивными или активными РГС конструктивно совмещены [“Оружие России, 2001...2002 г.”, М., Военный Парад, 2001 г., Самоходная огневая установка (СОУ) 9А310 М1-2, входящая в состав ЗРК “Бук-М1-2”, стр.570...571; ЭИ № 13, 2003 г., стр.5 (Jane's Defence Weekly, 5, II, 2003, р.6) ... ЗУР “Дерби” с активной РГС], а также огневые секции, не содержащие в своем составе ПБУ, а состоящие только из МФРЛС и ПУ с ЗУР. К таким огневым секциям относится секция или огневой взвод, входящий в ЗРК “Усовершенствованный ХОК” [см. Н.Я.Василин, А.А.Гуринович. Зенитные ракетные комплексы. Мн., ООО “Попури”, 2002 г., стр.421].
Огневые секции ЗРК “Бук-М1-2” и “Усовершенствованный ХОК” обладают таким же недостатком, как и огневая секция ЗРК “Пэтриот”, так как после пуска ЗУР с полуактивной РГС на частоте передающего устройства подсвета цели на борт ЗУР непрерывно передаются команды радиокоррекции (РК), вырабатываемые цифровой вычислительной системой (ЦВС) МФРЛС, сопровождающей обстреливаемую цель до точки встречи ЗУР с целью. Продолжительность времени радиолокационного контакта МФРЛС огневой секции с целью доходит до 70 с, что не позволяет добиться необходимого значения вероятности непоражения излучающих средств огневой секции противорадиолокационными ракетами. В огневой секции ЗРК “Дерби” захват сигнала цели активной РГС осуществляется в основном перед пуском ЗУР. В этом случае обстрел низколетящих целей (НЛЦ), т.е. целей, текущее значение угла места которых меньше полуширины диаграммы направленности антенны (ДНА) активной РГС, будет осуществляться в условиях мощных отражений от близко расположенных предметов и участков подстилающей поверхности, что может приводить при высоких частотах повторения зондирующих импульсов (при малых длительностях стробирующих импульсов) активной РГС к перегрузке или загрублению приемного устройства. Кроме этого, использование режима захвата сигнала цели на пусковой установке приводит, соответственно, к уменьшению дальней границы зоны поражения.
Использование режима “захвата сигнала цели в воздухе”, который также предусмотрен в ЗРК “Дерби”, накладывает повышенные требования на точность целеуказания от МФРЛС на ЗУР и на точность вывода пусковой установки в направлении упрежденной точки встречи. В этом случае реальная траектория ЗУР, особенно в начальный момент неуправляемого наведения, будет отличаться от кинематической из-за воздействия на систему управления различных возмущений (инструментальных ошибок, инерционности и т.д.), что приводит к снижению вероятности захвата сигнала цели активной РГС.
Наиболее близкой по технической сущности является огневая секция ЗРК “Бук-М1-2” (СОУ 9А310М1-2). Она состоит из установки с радиолокатором подсвета и наведения в составе многофункциональной радиолокационной станции с системой распознования, передающего устройства подсвета цели и передачи на зенитную управляемую ракету команд радиокоррекции, цифровой вычислительной системы, системы навигации, топопривязки и ориентирования, аппаратуры стартовой автоматики и пусковой установки с зенитными управляемыми ракетами в составе радиоприемного устройства активной радиолокационной головки самонаведения, бортовой цифровой вычислительной машины, приемопередающей антенны, радиопередающего устройства, активной радиолокационной головки самонаведения, модулятора (или формирователя модулирующих импульсов), радиоприемного устройства команд радиокоррекции, автопилота, устройства управления рулями ракет.
Недостатком указанного прототипа является отсутствие возможности корректировать или изменять траекторию зенитной управляемой ракеты с активной радиолокационной головкой самонаведения на начальном участке полета, что приводит к снижению вероятности захвата цели из-за воздействия на систему различных возмущений.
Техническим результатом предлагаемого изобретения является повышение вероятности захвата сигнала цели активной радиолокационной головкой самонаведения при одновременном сокращении продолжительности радиолокационного контакта огневой секции с целью и непоражения ее противорадиолокационными ракетами.
Сущность изобретения состоит в том, что огневая секция содержит установку с радиолокатором наведения и подсвета, состоящую из устройства подсвета цели, системы навигации, топопривязки и ориентирования, цифровой вычислительной системы, многофункциональной радиолокационной станции, аппаратуры стартовой автоматики. Выход цифровой вычислительной системы шиной соединен с первым входом устройства подсвета цели. Первый вход-выход цифровой вычислительной системы соединен с входом-выходом аппаратуры стартовой автоматики. Второй вход-выход цифровой вычислительной машины подключен к входу-выходу многофункциональной радиолокационной станции, выход системы навигации, топопривязки и ориентирования соединен шиной с первым входом цифровой вычислительной системы. Зенитная управляемая ракета состоит из бортовой цифровой вычислительной машины, приемопередающей антенны, радиопередающего устройства активной радиолокационной головки самонаведения, формирователя модулирующих импульсов, радиоприемного устройства активной головки самонаведения, автопилота, устройства управления рулями ракеты. Первый вход-выход бортовой цифровой вычислительной машины соединен со вторым входом-выходом аппаратуры стартовой автоматики, второй вход-выход бортовой цифровой вычислительной машины подключен к входу-выходу приемопередающей антенны. Второй выход бортовой цифровой вычислительной машины соединен с первым входом автопилота, выход автопилота соединен с входом устройства управления рулями ракеты, выход устройства управления рулями ракеты подключен ко второму входу автопилота. Вход радиоприемного устройства радиолокационной головки самонаведения соединен с выходом приемопередающей антенны, а выход радиоприемного устройства активной радиолокационной головки самонаведения подключен к первому входу бортовой цифровой вычислительной машины, выход формирователя модулирующих импульсов подключен к входу радиопередающего устройства активной головки самонаведения, выход которого соединен с приемопередающей антенной. Новыми признаками заявляемой огневой секции является то, что в установку с радиолокатором подсвета и наведения введены пеленгатор на частоте активной головки самонаведения, оптимальный фильтр и формирователь команд выключения излучения. Первый выход пеленгатора на частоте активной головки самонаведения подключен к последовательно соединенным оптимальному фильтру и формирователю команды выключения излучения, первый выход формирователя команды выключения излучения соединен с входом многофункциональной радиолокационной станции. Второй выход формирователя команд выключения излучения соединен с входом устройства подсвета цели, второй выход пеленгатора на частоте активной головки самонаведения шиной соединен со вторым входом цифровой вычислительной системы. В зенитную управляемую ракету введены радиоприемное устройство приема команд телеуправления на частоте подсвета и формирователь команд изменения параметров модуляции. Выход радиоприемного устройства приема команд телеуправления на частоте подсвета соединен со вторым входом бортовой цифровой вычислительной машины, первый выход бортовой вычислительной машины соединен с входом формирователя команд изменения параметров модуляции, выход которого соединен с входом формирователя модулирующих импульсов.
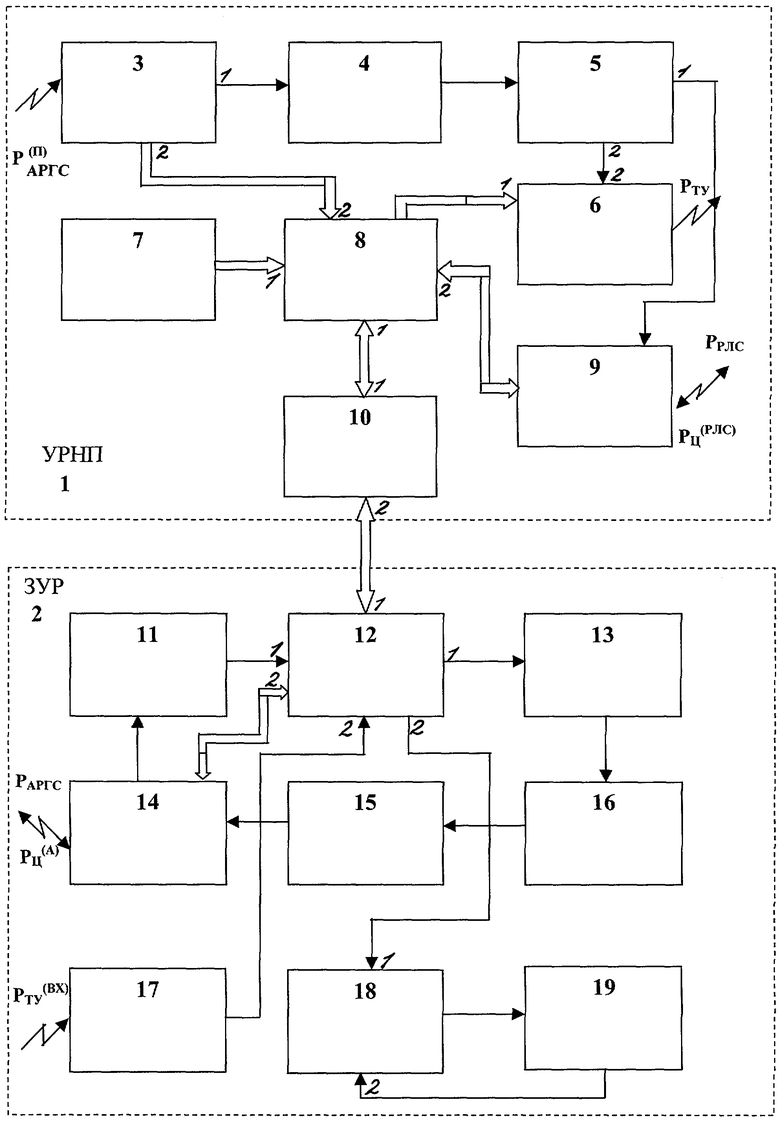
На чертеже изображена функциональная схема огневой секции.
Огневая секция состоит из установки с радиолокатором подсвета и наведения 1 и зенитной управляемой ракеты 2. Установка с радиолокатором подсвета и наведения 1 содержит пеленгатор на частоте активной головки самонаведения 3, оптимальный фильтр 4, формирователь команды выключения излучения 5, устройство подсвета цели 6, систему навигации, топопривязки и ориентирования 7, цифровую вычислительную систему 8, многофункциональную радиолокационную станцию 9, аппаратуру стартовой автоматики 10. Зенитная управляемая ракета 2 состоит из радиоприемного устройства активной радиолокационной головки самонаведения 11, бортовой цифровой вычислительной машины 12, формирователя команд изменения параметров модуляции 13, приемопередающей антенны 14, радиопередающего устройства активной радиолокационной головки самонаведения 15, формирователя модулирующих импульсов 16, радиоприемного устройства приема команд телеуправления на частоте подсвета 17, автопилота 18, устройства управления рулями ракеты 19.
Первый выход пеленгатора на частоте активной головки самонаведения 3 подключен к последовательно соединенным оптимальному фильтру 4, формирователю команды выключения излучения 5. Первый выход формирователя команды выключения излучения 5 соединен с входом многофункциональной радиолокационной станции 9. Вход-выход многофункциональной радиолокационной станции 9 подключен ко второму входу-выходу цифровой вычислительной системы 8. Первый вход-выход цифровой вычислительной системы 8 соединен с первым входом-выходом аппаратуры стартовой автоматики 10. Выход цифровой вычислительной системы 8 шиной подключен к первому входу устройства подсвета цели 6, второй вход устройства подсвета цели соединен со вторым выходом формирователя команд выключения излучения 5. Второй выход пеленгатора на частоте активной головки самонаведения 3 подключен шиной ко второму входу цифровой вычислительной машины 8, первый вход цифровой вычислительной машины 8 шиной соединен с выходом системы навигации и топопривязки 7. Второй вход-выход аппаратуры стартовой автоматики 10 подключен к первому входу-выходу бортовой цифровой вычислительной машины 12, первый выход бортовой вычислительной машины 12 подключен к последовательно соединенным формирователю команд изменения параметров модуляции 13, формирователю модулирующих импульсов 16, радиопередающему устройству активной головки самонаведения 15 и приемопередающей антенне 14. Второй выход бортовой вычислительной машины 12 соединен с первым входом автопилота 18, выход автопилота 18 подключен к входу устройства управления рулями ракеты 19, выход устройства управления рулями ракеты 19 соединен со вторым входом автопилота 18. Второй вход-выход бортовой цифровой вычислительной машины 12 соединен с входом-выходом приемопередающей антенны 14, выход приемопередающей антенны 14 подключен к входу радиоприемного устройства активной головки самонаведения 11. Выход радиоприемного устройства активной головки самонаведения 11 соединен с первым входом бортовой цифровой вычислительной машины 12. Выход радиоприемного устройства приема команд телеуправления на частоте подсвета 17 подключен ко второму входу бортовой цифровой вычислительной машины 12.
На чертеже обозначены:
рТУ, рту (вх) - уровень сигнала на выходе устройства подсвета цели 6, несущего команды телеуправления и, соответственно, на входе радиоприемного устройства команд телеуправления на частоте подсвета 17;
рАРГС, РАРГС (п) - уровень сигнала на выходе приемопередающей антенны ЗУР с активной РГС и, соответственно, на входе пеленгатора на частоте активной головки самонаведения 3, расположенного в составе установки с радиолокатором наведения и подсвета;
рРЛС, p Ц (РЛС) - уровень сигнала на выходе многофункциональной радиолокационной станции и уровень сигнала цели на входе многофункциональной радиолокационной станции, соответственно;
РЦ (А) - уровень сигнала цели на входе ЗУР с активной радиолокационной головкой самонаведения.
Огневая секция работает следующим образом.
После установки боевых средств огневой секции на позиции из системы навигации и топопривязки (7) установки с радиолокатором наведения и подсвета (УРНП) значения текущих координат Х и Y вводятся в цифровую вычислительную систему (8). Информация о координатах обнаруженной цели “Ц” в лучевой системе координат с многофункциональной радиолокационной станции (9) поступает также в цифровую вычислительную систему (8), в которой осуществляется расчет углов наведения ϕа нав и ϕН нав (где αа нав и ϕН нав - угловые координаты цели в азимутальной и угломестной плоскостях соответственно) для приемопередающей антенны (14) и определение координат упрежденной или мгновенной точки встречи зенитной управляемой ракеты с целью в зависимости от ее параметров. Данные об угловых координатах упрежденной или мгновенной точки встречи зенитной управляемой ракеты (ЗУР) с целью используются для наведения ЗУР, находящейся на пусковой установке, в необходимое направление. При этом предполагается, что для наведения ЗУР используется метод параллельного сближения, так как по сравнению с другими методами при использовании его предъявляются наименьшие требования по маневренности зенитной управляемой ракеты.
При методе параллельного сближения в течение всего времени полета ЗУР до упрежденной или мгновенной точки встречи линия ракета-цель остается параллельной данному направлению, если выполняются одно из трех условий:

где Vц, Vp - скорость цели и ракеты соответственно;
qЦ - угол между линией визирования ракета-цель и вектором скорости цели;
qp - угол между линией ракета-цель и вектором скорости ракеты;
 - угловая скорость вращения линии ракета-цель;
- угловая скорость вращения линии ракета-цель;
εд0 - угол наклона линии ракета-цель в момент начала наведения
[В.П.Демидов, Н.Ш.Кутырев. Управление зенитными ракетами. М., Военное издательство, 1989 г., стр.27].
После того как сопровождаемая цель вошла в зону поражения, и при наличии информации об обстреле или о возможности обстрела огневой секции противорадиолокационными ракетами, осуществляется пуск зенитной управляемой ракеты с активной радиолокационной головкой самонаведения.
Для исключения влияния отражений зондирующего сигнала от подстилающей поверхности и близко расположенных предметов при обстреле низколетящих целей (НЛЦ) на радиоприемное устройство активной радиолокационной головки самонаведения 11, пуск ЗУР осуществляется с захватом сигнала цели по скорости (доплеровской частоте) и угловым координатам в воздухе (режим “ЗВ”), т.е. при включенном РПДУ (15) на стартовом участке.
После окончания стартового участка начинается сопровождение ЗУР пеленгатором на частоте активной головки самонаведения (3) на частоте излучения активной радиолокационной головки самонаведения [Л.С.Белявский, B.C.Новиков, П.В.Олянюк. Основы радионавигации. М.: Транспорт, 1982, стр.90]. Радиопередающее устройство активной радиолокационной головки самонаведения (15) также выходит на номинальный режим в течение стартового участка. В процессе сопровождения зенитной управляемой ракеты пеленгатором на частоте активной головки самонаведения (3) фактические угловые координаты ее и дальность от установки с радиолокатором, взятой (или вычисленной) из математической модели наведения зенитной управляемой ракеты в упрежденную или мгновенную точку встречи, непрерывно сравниваются с параметрами кинематической траектории, вычисляемой цифровой вычислительной системой (8). При этом параметры кинематической траектории в каждый конкретный момент времени уточняются (или изменяются) с учетом возможного маневра цели. Если зенитная управляемая ракета с активной радиолокационной головкой самонаведения после завершения стартового участка не захватила сигнал цели, начинается “накопление” траекторией ошибки, которая приводит к возникновению (появлению) начального рассогласования в траектории полета зенитной управляемой ракеты в общем случае по угловым координатам в двух плоскостях.
С появлением “рассогласования” начинается участок “вывода” с использованием режима телеуправления первого вида, при котором команды телеуправления, формируемые цифровой вычислительной системой (8), с помощью устройства подсвета цели (6) передаются на вход радиоприемного устройства команд телеуправления на частоте подсвета (17) зенитной управляемой ракеты с активной радиолокационной головкой самонаведения. Команды телеуправления формируются на основании информации о текущих угловых координатах и дальности до ракеты (ε р, Др) и цели (εц, Дц), пропорциональных сигналу рассогласования Δε, который и передается на борт зенитной управляемой ракеты. С выхода радиоприемного устройства приема команд телеуправления на частоте подсвета (17) через бортовую цифровую вычислительную машину (12) команды управления поступают в автопилот (18), после чего начинается этап отработки начальной ошибки в пространственном положении ЗУР или ее вектора скорости (т.е. начальной ошибки параметра управления).
В общем случае при имеющихся или заданных параметрах контура управления и летно-баллистических характеристик зенитной управляемой ракеты время, а следовательно, и дальность вывода ее на траекторию наведения является случайной величиной, зависящей в основном от начальной ошибки встреливания (куда входят и ошибки целеуказания) ракеты в заданный объем пространства около кинематической траектории и угловой скорости движения линии визирования цели (величина этой скорости определяет кривизну требуемой траектории на участке вывода). При этом можно считать, что в каждой плоскости наведения рассеивание точек положения зенитной управляемой ракеты в момент начала телеуправления независимо и подчинено нормальному закону [Ф.К.Неупокоев Стрельба зенитными ракетами. М., Военное издательство М.О. СССР, 1980 г. стр.238].
После того как начальное рассогласование на участке вывода ЗУР на необходимую траекторию (близкую к кинетической или находящейся в области допустимых рассогласований при методе параллельного сближения) с помощью телеуправления уменьшено до допустимых значений, уровень сигнала на частоте радиопередающего устройства активной радиолокационной головки самонаведения (15), отраженного от цели, на входе радиоприемного устройства активной радиолокационной головки самонаведения (11) становится достаточным для его захвата. После “допоиска” по доплеровскому смещению частоты (захвату сигнала цели по скорости) и захвату его по угловым координатам в бортовой цифровой вычислительной машине (12) формируется команда “захват”, которая помимо решения основных задач, связанных с наведением ЗУР в упрежденную или мгновенную точку встречи, поступает на вход формирователя команд изменения параметров модуляции (13) формирования команды на изменение длительности τ и периода повторения Т зондирующих импульсов [Б.А.Калабеков, И.А.Мамзелев. Цифровые устройства и микропроцессорные системы. М.: Радио и связь, 1987 стр.59...62]. Далее эта команда поступает на вход формирователя модулирующих импульсов (16), где и осуществляется изменение τ и Т с сохранением показателя скважности, т.е.
T1, τ1 - период повторения и длительность излучаемых радиопередающим устройством активной радиолокационной головки самонаведения (15) импульсов в начальный момент наведения;
Т2, τ2 - соответственно период повторения и длительность импульса после захвата сигнала цели активной радиолокационной головкой самонаведения.
При этом с целью уменьшения “мертвой” зоны по дальности целесообразно изменение “Т” и “τ” делать в сторону их уменьшения по сравнению с начальными значениями, когда расстояние “зенитная управляемая ракета - цель” еще значительно.
Излучаемый боковыми лепестками приемопередающей антенны (14), сигнал поступает на вход пеленгатора на частоте активной головки самонаведения (3) и далее с его выхода на вход оптимального фильтра (4) для обработки импульсной последовательности с известными параметрами [М.И.Финкельштейн. Основы радиолокации. М.: Сов. радио, 1973 г., стр.208].
Как только на входе оптимального фильтра (4) появляется импульсная последовательность с Т2 и τ2, на его выходе появляется сигнал, который далее подается на формирователь команды выключения излучения (5), при этом с первого выхода формирователя команды выключения излучения (5) команда поступает на выключение излучения многофункциональной радиолокационной станции (9), а со второго выхода - на выключение устройства подсвета цели (6). С этого момента времени зенитная управляемая ракета с активной радиолокационной головкой самонаведения переходит полностью в режим автономного наведения на цель, а огневая секция в случае возможного обстрела противорадиолокационными ракетами через 40...50 с может по принятому целеуказанию приступить к обстрелу новой цели. Время радиолокационного контакта огневой секции с целью составляет 20...25 с.
Если непосредственно после завершения стартового участка и включения (выхода на номинальный режим) радиопередающего устройства активной радиолокационной головки самонаведения (15) траекторные параметры (или ошибки прицеливания) находятся в допустимых пределах, активная радиолокационная головка самонаведения захватывает сигнал цели, формирователь команд изменения параметров модуляции (13) формирует команду на изменение значений “Т” и “τ”. Импульсная последовательность с новыми значениями Т и τ через пеленгатор на частоте активной головки самонаведения (3) поступает на оптимальный фильтр (4), после чего командой с выхода формирователя команд на выключение излучения (5) выключаются передающие устройства многофункциональной радиолокационной станции (9) и устройство подсвета цели (6). Зенитная управляемая ракета переходит в режим автономного самонаведения без включения контура телеуправления, и время радиолокационного контакта огневой секции с целью уменьшается до времени реакции огневой секции (до 20 с).
Таким образом, в предлагаемой огневой секции в 2,5...3 раза уменьшилась продолжительность радиолокационного контакта огневой секции с целью, повысилась вероятность захвата сигнала цели активной радиолокационной головкой самонаведения. К дополнительным преимуществам предлагаемого технического решения относится то, что излучение устройством подсвета на известных частотах в начальный момент после пуска зенитной управляемой ракеты создает видимость пуска зенитной управляемой ракеты с полуактивным методом самонаведения, что вносит на определенное время дезинформацию средствам радиотехнической разведки и радиопротиводействия вероятного противника.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229085C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229668C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2223459C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2012 |
|
RU2521889C1 |
| Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия | 2019 |
|
RU2714993C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ С ПОЛУАКТИВНЫМИ РАДИОЧАСТОТНЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2008 |
|
RU2363911C1 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2002 |
|
RU2241193C2 |
Изобретение относится к оборонной технике, в частности к мобильным зенитным ракетным комплексам (ЗРК), в которых зенитные управляемые ракеты (ЗУР) наводятся с помощью полуактивных или активных радиолокационных головок самонаведения (РГС), и может быть использовано для организации противовоздушной обороны (ПВО) войск и военных объектов от поражения средствами воздушного нападения (СВН) вероятного противника. Техническим результатом изобретения является повышение вероятности захвата сигнала цели активной радиолокационной головкой самонаведения при одновременном сокращении продолжительности радиолокационного контакта огневой секции с целью и непоражения ее противорадиолокационными ракетами. Сущность изобретения состоит в том, что огневая секция содержит установку с радиолокатором наведения и подсвета, состоящую из устройства подсвета цели, системы навигации, топопривязки и ориентирования, цифровой вычислительной системы, многофункциональной радиолокационной станции, аппаратуры стартовой автоматики, и зенитную управляемую ракету, состоящую из бортовой цифровой вычислительной машины, приемопередающей антенны, радиопередающего устройства активной радиолокационной головки самонаведения, формирователя модулирующих импульсов, радиоприемного устройства активной головки самонаведения, автопилота, устройства управления рулями ракеты. Новыми признаками заявляемой огневой секции является то, что в установку с радиолокатором подсвета и наведения введены пеленгатор на частоте активной головки самонаведения, оптимальный фильтр и формирователь команд выключения излучения, а в зенитную управляемую ракету введены радиоприемное устройство приема команд телеуправления на частоте подсвета и формирователь команд изменения параметров модуляции. 1 ил.
Огневая секция, содержащая установку с радиолокатором наведения и подсвета, состоящую из устройства подсвета цели, системы навигации, топопривязки и ориентирования, цифровой вычислительной системы, многофункциональной радиолокационной станции, аппаратуры стартовой автоматики, причем выход цифровой вычислительной системы шиной соединен с первым входом устройства подсвета цели, первый вход-выход цифровой вычислительной системы соединен с входом-выходом аппаратуры стартовой автоматики, второй вход-выход цифровой вычислительной машины подключен к входу-выходу многофункциональной радиолокационной станции, выход системы навигации, топопривязки и ориентирования соединен шиной с первым входом цифровой вычислительной системы, зенитную управляемую ракету, состоящую из бортовой цифровой вычислительной машины, приемопередающей антенны, радиопередающего устройства активной радиолокационной головки самонаведения, формирователя модулирующих импульсов, радиоприемного устройства активной головки самонаведения, автопилота, устройства управления рулями ракеты, причем первый вход-выход бортовой цифровой вычислительной машины соединен со вторым входом-выходом аппаратуры стартовой автоматики, второй вход-выход бортовой цифровой вычислительной машины подключен к входу-выходу приемопередающей антенны, второй выход бортовой цифровой вычислительной машины соединен с первым входом автопилота, выход автопилота соединен с входом устройства управления рулями ракеты, выход устройства управления рулями ракеты подключен ко второму входу автопилота, вход радиоприемного устройства радиолокационной головки самонаведения соединен с выходом приемопередающей антенны, а выход радиоприемного устройства активной радиолокационной головки самонаведения подключен к первому входу бортовой цифровой вычислительной машины, выход формирователя модулирующих импульсов подключен к входу радиопередающего устройства активной головки самонаведения, выход которого соединен с приемопередающей антенной, отличающаяся тем, что в установку с радиолокатором подсвета и наведения введены пеленгатор на частоте активной головки самонаведения, оптимальный фильтр и формирователь команд выключения излучения, причем первый выход пеленгатора на частоте активной головки самонаведения подключен к последовательно соединенным оптимальному фильтру и формирователю команды выключения излучения, первый выход формирователя команды выключения излучения соединен с входом многофункциональной радиолокационной станции, второй выход формирователя команд выключения излучения соединен с входом устройства подсвета цели, второй выход пеленгатора на частоте активной головки самонаведения шиной соединен со вторым входом цифровой вычислительной системы, а в зенитную управляемую ракету введены радиоприемное устройство приема команд телеуправления на частоте подсвета и формирователь команд изменения параметров модуляции, причем выход радиоприемного устройства приема команд телеуправления на частоте подсвета соединен со вторым входом бортовой цифровой вычислительной машины, первый выход бортовой вычислительной машины соединен с входом формирователя команд изменения параметров модуляции, выход которого соединен с входом формирователя модулирующих импульсов.
| Оружие России | |||
| - М.: Военный парад, 2001, с.569-571 | |||
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ УСТАНОВКА ПОДСВЕТА И НАВЕДЕНИЯ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ ДЕЙСТВИЯ | 2000 |
|
RU2169333C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАСПЛАВА МЕТАЛЛА И ПЛАВИЛЬНО-ГАЗИФИКАЦИОННЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2181148C2 |
| МНОГОРЯДНЫЙ КАРТОФЕЛЕКОПАТЕЛЬ | 1989 |
|
RU2082294C1 |

