Изобретение относится к роботу-пылесосу.
Обычные пылесосы обслуживаются пользователем, который перемещает пылесос и, в частности, перемещает напольную насадку, посредством которой всасывается пыль, по очищаемой поверхности. При этом, например, обычные напольные пылесосы включают в себя корпус, который установлен на роликах и/или на скользящих полозьях. В корпусе расположен пылесборник, в котором находится фильтровальный мешок. Напольная насадка посредством всасывающей трубы и всасывающего шланга соединена с пылесборной камерой. Кроме того, в обычных напольных пылесосах в корпусе расположен блок электровентилятора, который создает в пылесборнике разрежение. Таким образом, в направлении движения потока воздуха блок электровентилятора расположен позади напольной насадки, всасывающей трубы, всасывающего шланга, а также пылесборника, или фильтровального мешка. Поскольку через такие блоки электровентиляторов протекает очищенный воздух, они иногда обозначаются также термином "двигатели на чистом воздухе" ("Clean-Air-Motor").
Раньше имелись, в частности, также пылесосы, в которых всасываемый грязный воздух проводился непосредственно сквозь электровентилятор в непосредственно примыкающий к нему фильтровальный мешок. Примеры этого показаны в US 2101390, US 2036056 и US 2482337. В настоящее время эти формы пылесосов больше не имеют широкого распространения.
Такие электровентиляторы загрязненного воздуха или пыльного воздуха обозначаются также терминами „Dirty-Air-Motor" или „Direct-Air-Motor", т.е. соответственно "двигатель на грязном воздухе" или "двигатель на прямом воздухе". Применение таких двигателей на загрязненном воздухе описывается также в GB 554177, US 4644606, US 4519112, US 2002/0159897, US 5573369, US 2003/0202890 или US 6171054.
В течение последних лет завоевали популярность также роботы-пылесосы. Такие роботы-пылесосы пользователь уже не должен проводить над очищаемой поверхностью; напротив, они ездят по полу самостоятельно. Примеры таких роботов-пылесосов известны, например, из ЕР 2741483, DE 102013100192 и US 2007/0272463.
Недостаток этих известных роботов-пылесосов состоит в том, что они принимают только небольшое количество пыли. Это обусловлено тем, что либо пыль принимается только за счет очищающего воздействия вращающегося щеточного валика, либо используются блоки электровентилятора с очень незначительной производительностью. Еще один недостаток состоит в том, что эти робот-пылесосы вследствие своей компактной конструкции имеют только незначительную емкость для приема пыли.
Альтернативный робот-пылесос описывается в WO 02/074150. Конструкция этого робота-пылесоса состоит из двух частей и содержит модуль резервуара или вентилятора и модуль чистящей головки, который соединен с модулем вентилятора посредством шланга.
В свете вышеизложенного уровня техники задача, лежащая в основе настоящего изобретения, состоит в том, чтобы создать улучшенный робот-пылесос.
Эта задача решена предметом пункта 1 формулы изобретения. Согласно изобретению представлен робот-пылесос,
содержащий блок пылесборника, установленный на колесах, всасывающий шланг и установленную на колесах напольную насадку, причем напольная насадка сообщается по текучей среде с блоком пылесборника посредством всасывающего шланга, а также содержащий блок электровентилятора для всасывания потока воздуха через напольную насадку,
причем блок электровентилятора расположен между напольной насадкой и блоком пылесборника так, что всасываемый через напольную насадку поток воздуха проходит через блок электровентилятора в блок пылесборника,
причем блок пылесборника имеет приводное устройство для приведения в движение по меньшей мере одного из колес блока пылесборника, и
причем напольная насадка имеет приводное устройство для приведения в движение по меньшей мере одного из колес напольной насадки.
Таким образом, в роботе-пылесосе предпочтительно применение двигателя типа Dirty-Air-Motor, или, соответственно, Direct-Air-Motor. Робот-пылесос согласноизобретению позволяет даже при незначительной мощности двигателя достигать высоких значений объемного расхода. Двигатель типа Dirty-Air-Motor имеет, например, максимальное число оборотов менее 30000 об/мин и потребляемую электрическую мощность менее 900 Вт.
В направлении движения потока воздуха напольная насадка, иногда обозначаемая также термином "всасывающее сопло", расположена перед всасывающим шлангом, а всасывающий шланг расположен перед блоком пылесборника. Посредством блока электровентилятора воздух, всасываемый напольной насадкой, проводится сначала во всасывающий шланг, а затем в блок пылесборника. На основе сообщения по текучей среде, или аэродинамического соединения, обеспечивается сквозной поток воздуха через напольную насадку и всасывающий шланг в блок пылесборника.
Неожиданно выяснилось, что применение двигателей на загрязненном воздухе (Dirty-Air-Motors) обеспечивает преимущество также в роботах-пылесосах, в частности, для транспортировки загрязненного воздуха, всасываемого через напольную насадку, во всасывающую трубу.
В отличие от обычных роботов-пылесосов, у которых во время их эксплуатации, в частности, в блоке пылесборника, или, соответственно, пылесборной камере, создается разрежение, в описываемом здесь роботе-пылесосе по меньшей мере в блоке пылесборника создается избыточное давление. Таким образом, имеется возможность уменьшить толщину стенок этих частей либо применять в меньшем количестве элементы усиления (например, ребра жесткости) или обходиться совсем без них, что приводит к сокращению веса.
На основе конструкции робота-пылесоса, имеющего блок пылесборника и соединенную с ним посредством шланга напольную насадку, становится возможным особенно предпочтительный сбор пыли при высокой гибкости применения. В частности, имеется возможность, с одной стороны, достигать очищаемых поверхностей напольной насадкой даже в узких местах и, с другой стороны, предоставлять блок пылесборника с относительно большим объемом для приема пыли. Блок пылесборника и напольная насадка выполнены как отдельные или разделенные блоки; каждый из них установлен (отдельно) на собственных колесах. Блок пылесборника и напольная насадка выполнены с возможностью перемещения независимо друг от друга.
Блок пылесборника может иметь три-четыре колеса, в частности, ровно три или ровно четыре колеса. Приводное устройство блока пылесборника может предназначаться для привода одного из колес, нескольких колес или всех колес блока пылесборника. Для каждого колеса, приводимого в движение, приводное устройство может иметь отдельный, или самостоятельный приводной узел. Это позволяет приводить в движение каждое из колес независимо от других, или самостоятельно.
Напольная насадка может иметь три-четыре колеса, в частности, ровно три или ровно четыре колеса. Приводное устройство блока пылесборника может предназначаться для привода одного из колес, нескольких колес или всех колес блока пылесборника. Для каждого колеса, приводимого в движение, приводное устройство может иметь отдельный, или самостоятельный приводной узел. Это позволяет приводить в движение каждое из колес независимо от других, или самостоятельно.
Приводное устройство блока пылесборника может быть разделено с приводным устройством напольной насадки, или быть выполненным отдельно. В частности, возможно приведение в движение блока пылесборника и напольной насадки независимо друг от друга. Они могут, например, перемещаться в разных направлениях. Возможно также неподвижное положение одного из них, в то время как другой перемещается.
Возможно такое расположение блока электровентилятора между напольной насадкой и всасывающим шлангом, так что всасываемый через напольную насадку поток воздуха проходит во всасывающий шланг через блок электровентилятора. При таком исполнении в процессе эксплуатации во всасывающем шланге также создается избыточное давление. Таким образом, для стенки всасывающего шланга требуется во всяком случае незначительное усиление.
В роботах-пылесосах, описанных ранее, возможно расположение блока электровентилятора на напольной насадке и/или над ней, в частности, непосредственно на напольной насадке и/или над ней. Это приводит к предпочтительному увеличению мощности всасывания. Кроме того, достигается компактная форма узла, состоящего из напольной насадки и блока электровентилятора. Например, возможно такое расположение блока электровентилятора, при котором воздух, всасываемый через напольную насадку, поступает из напольной насадки непосредственно в блок электровентилятора.
Блок электровентилятора может сообщаться по текучей среде с напольной насадкой посредством патрубка. В этом случае блок электровентилятора уже не располагается непосредственно на напольной насадке и/или над ней. Патрубок может иметь, в частности, длину от 10 мм до 300 мм, предпочтительно от 10 мм до 100 мм.
В альтернативном варианте возможно расположение блока электровентилятора между всасывающим шлангом и блоком пылесборника таким образом, что поток воздуха, всасываемого через напольную насадку, проходит через всасывающий шланг в блок электровентилятора и через блок электровентилятора в блок пылесборника. Тем самым достигается легкая и компактная конструкция на стороне напольной насадки, что приводит к высокой подвижности напольной насадки и к досягаемости даже ограниченных по ширине поверхностей.
Возможен, в частности, блок пылесборника, содержащий корпус и расположенный в корпусе пылеуловитель, причем блок электровентилятора расположен на корпусе, у корпуса или внутри корпуса.
Корпус может содержать стенку корпуса, в частности, состоящую из синтетического материала.
Расположение пылеуловителя внутри корпуса блока пылесборника и расположение блока электровентилятора в корпусе или на корпусе позволяют получить компактный вариант осуществления блока пылесборника и тем самым робота-пылесоса в целом.
Блок электровентилятора может располагаться (в частности, в процессе эксплуатации робота-пылесоса) над пылеуловителем или выше него, или на той же высоте, что и пылеуловитель. Таким образом, блок электровентилятора, в частности, не находится ниже пылеуловителя. При этом транспортировать загрязненный воздух посредством блока электровентилятора с преодолением силы тяжести не требуется, или требуется только в незначительной степени.
Возможно расположение блока электровентилятора на корпусе. При этом, в частности, пылеуловитель в процессе эксплуатации робота-пылесоса может быть расположен ниже блока электровентилятора или на той же высоте.
В описанных ранее роботах-пылесосах всенаправленными колесами могут быть одно из колес, несколько колес или все колеса блока пылесборника и/или одно из колес, несколько колес или все колеса напольной насадки. Применение одного или нескольких всенаправленных колес делает возможным универсальное и разнообразное перемещение блока пылесборника или напольной насадки.
На боковой поверхности каждого из всенаправленных колес имеется некоторое количество помещенных с возможностью поворота роликов, или тел качения, оси которых проходят непараллельно колесной оси (всенаправленного колеса). В частности, оси роликов могут быть направлены под углом к колесной оси или проходить перпендикулярно ей. Пример всенаправленного колеса - это колесо Илона, которое описывается в том числе в US 3876255.
Возможно такое выполнение блока электровентилятора, что при потребляемой электрической мощности менее 450 Вт согласно германскому промышленному стандарту DIN EN 60312-1 и при 8-м размере отверстия контрольной заслонки он создает объемный расход, превышающий 30 л/с, в частности, превышающий 35 л/с.В качестве альтернативы или дополнения возможно такое выполнение блока электровентилятора, что при потребляемой электрической мощности менее 250 Вт согласно стандарту DIN EN 60312-1 и при 8-м размере отверстия контрольной заслонки он производит объемный расход, превышающий 25 л/с, в частности, превышающий 30 л/с. В качестве альтернативы или дополнения возможно такое выполнение блока электровентилятора, что при потребляемой электрической мощности менее 100 Вт согласно стандарту DIN EN 60312-1 и при 8-м размере отверстия контрольной заслонки он производит объемный расход, превышающий 10 л/с, в частности, превышающий 15 л/с.
Таким образом получается особенно эффективный робот-пылесос, имеющий намного более высокую силу всасывания, в частности, по сравнению с обычными роботами-пылесосами.
Характеристики воздуха для пылесоса или для блока электровентилятора определяются согласно стандарту DIN EN 60312-1:2014-01. В частности, это обозначено в разделе 5.8. При этом используется измерительное устройство в варианте исполнения В, согласно разделу 7.3.7.3. Если блок электровентилятора измеряется без корпуса пылесоса, также используется измерительное устройство в варианте В. Для промежуточных элементов в месте подключения к измерительной камере, в случае их необходимости, действительны условия раздела 7.3.7.1.
Вместо понятия "поток воздуха" согласно стандарту DIN EN 60312-1 также используются понятия "объемный поток" и "всасывающий поток воздуха".
Напольная насадка может иметь опорную пластину с опорной поверхностью, которая при эксплуатации напольного пылесоса обращена к очищаемой поверхности, причем в опорной пластине имеется по меньшей мере один канал для потока воздуха, параллельный опорной поверхности, с предусмотренным в опорной пластине боковым отверстием. При эксплуатации напольного пылесоса опорная пластина может, в частности, лежать своей опорной поверхностью на очищаемой поверхности или располагаться на расстоянии от нее, например, посредством рейки со щеткой. Опорная пластина может иметь по меньшей мере один изогнутый канал для потока воздуха, параллельный опорной поверхности. Изогнутый канал для потока воздуха может иметь форму кольца или участка кольца.
Опорная пластина обозначается также термином "подошва насадки". Напольная насадка имеет всасывающее отверстие, сообщающееся с блоком электровентилятора. Это всасывающее отверстие сообщается по текучей среде, т.е. состоит в аэродинамическом соединении, с по меньшей мере одним каналом для потока воздуха. Благодаря по меньшей мере одному, в частности, одному или нескольким каналам для потока воздуха при хорошей производительности всасывания устанавливается предпочтительное прижимное усилие напольной насадки.
Всасывающий шланг может иметь диаметр в диапазоне от 25 мм до 50 мм и/или длину в диапазоне от 500 мм до 2500 мм. Возможно выполнение всасывающего шланга гибким, в частности, таким образом, что он обеспечивает возможность его деформирования при надлежащем использовании робота-пылесоса. Всасывающий шланг может состоять частично или полностью из синтетического материала. Он может содержать, в частности, пластмассовую стенку и/или усиливающий элемент из металла (например, спиральную проволоку). Возможно выполнение всасывающего шланга в виде шланга из высокоэластичного материала. Тогда он имеет изменяемую длину и позволяет растягивать его до длины, в несколько раз превышающей его длину в невытянутом (неподвижном) состоянии.
Всасывающий шланг может иметь постоянный диаметр или диаметр, изменяющийся по его длине. В частности, возможен всасывающий шланг, имеющий коническую форму, причем в предпочтительном случае диаметр уменьшается по направлению к напольной насадке. Указанные выше значения диаметра относятся, в частности, к самому малому диаметру всасывающего шланга.
Возможно такое выполнение блока пылесборника и/или такое расположение блока электровентилятора, что через напольную насадку невозможно осуществить соприкосновение рабочего колеса вентилятора, с испытательным щупом в соответствии со стандартом IEC/EN 60335. Здесь рекомендуется раздел 8 версии стандарта IEC/EN 60335-1:В 2012-10. В частности, должен использоваться испытательный щуп В.
Это уменьшает опасность повреждения блока электровентилятора и опасность травм в случае прикосновения к напольной насадке при работающем двигателе.
Робот-пылесос может представлять собой пылесос с мешком. Пылесос с мешком - это такой пылесос, в котором всосанная пыль отделяется и собирается в фильтровальном мешке. Площадь фильтра робота-пылесос может составлять по меньшей мере 800 см2. Робот-пылесос может представлять собой, в частности, пылесос с мешком, рассчитанный на одноразовые мешки.
Площадь фильтра фильтровального мешка пылесоса обозначает всю ту поверхность материала фильтра, которая находится между боковыми швами, проходящими по краям, или в пределах, ограниченных такими швами (например, сварными или клееными швами). При этом нужно учитывать также, возможно, имеющиеся боковые складки или складки поверхностей. Площадь отверстия для заполнения мешка или, соответственно, впускного отверстия (включая один из швов, окружающих это отверстие) не входит в площадь фильтра.
Фильтровальный мешок пылесоса может представлять собой плоский пакет или иметь форму с прямоугольным дном. Плоский пакет образуется двумя боковыми стенками из материала фильтра, которые соединены друг с другом вдоль краев их боковой поверхности (например, сварены или склеены). Возможно предусмотренное в одной из двух боковых стенок отверстие для заполнения мешка, или впускное отверстие. Боковые поверхности или стенки могут иметь прямоугольную основную форму. Каждая боковая стенка может содержать один или более слоев нетканого материала и/или нетканого полотна.
Возможен робот-пылесос в виде пылесоса с фильтровальным мешком, содержащий фильтровальный мешок для пылесоса, причем фильтровальный мешок для пылесоса выполнен в форме плоского пакета и/или одноразового мешка.
Стенка фильтровального мешка пылесоса может содержать один или более слоев нетканого материала и/или один или более слоев нетканого полотна. Она может содержать, в частности, слоистый материал из одного или нескольких слоев нетканого материала и/или одного или нескольких слоев нетканого полотна. Такой слоистый материал описан, например, в WO 2007/068444.
Термин "нетканый материал" понимается согласно стандарту DIN EN ISO 9092:2010. При этом, в частности, пленочные и бумажные структуры, в частности, фильтровальная бумага, не рассматриваются как нетканый материал. "Нетканое полотно" - это структура из волокон и/или элементарных нитей или коротковолокн истой пряжи, которые посредством какого-либо способа сформированы в плоскостную структуру (исключая переплетение пряжи, как в тканом материале, плетеной ткани, трикотаже, кружевах или тафтинговой ткани), однако, не были соединены посредством какого-либо способа. Посредством способа соединения из нетканого материала получают нетканое полотно. Нетканый материал или нетканое полотно могут быть высушены, вымочены или экструдированы.
Робот-пылесос может содержать выходной фильтр, в частности, имеющий площадь фильтра, составляющую по меньшей мере 800 см2. Выходной фильтр может быть выполнен, в частности, плиссированным или складчатым. Это позволяет получать большую поверхность при меньшей площади опорной поверхности. При этом возможен выходной фильтр, предусмотренный в креплении, как это описано, например, в Европейской заявке на изобретение номер 14179375.2. Такие выходные фильтры позволяют использовать пылесборные мешки с незначительной эффективностью пылеулавливания, например, однослойные пылесборные мешки. В качестве фильтровального мешка с незначительной эффективностью пылеулавливания может применяться, например, такой пакет, у которого материал фильтра стенки пакета состоит из фильерного нетканого полотна (Spunbond), имеющего плотность от 15 г/м2 до 100 г/м2. В частности, фильтровальный мешок может быть выполнен однослойным. В альтернативном варианте возможно, например, использование пакета, у которого материал фильтра стенки пакета выполнен из многослойного материала, состоящего из фильерного нетканого полотна - спанбонда, мелтблауна и еще одного слоя спанбонда (SMS).
В качестве альтернативы робот-пылесос может представлять собой пылесос без мешка (безмешковый пылесос), в частности, с выходным фильтром, имеющим площадь фильтра, составляющую по меньшей мере 800 см2, как описанный выше. Пылесос без мешка - это такой пылесос, в котором всасываемая пыль отделяется и собирается без использования фильтровального мешка. В этом случае блок пылесборника может содержать отбойный либо центробежный, или циклонный, пылеуловитель.
Возможен блок электровентилятора, содержащий центробежный вентилятор, в частности, одноступенчатый. В центробежном вентиляторе воздух всасывается в аксиальном направлении, или параллельно приводной оси рабочего колеса, и вследствие вращения рабочего колеса поворачивается, в частности, примерно на 90°, а выдувается в радиальном направлении.
По существу напольная насадка может представлять собой активную или пассивную напольную насадку. Активная напольная насадка имеет во всасывающем отверстии щеточный валик (иногда называемый также выбивальной щеткой и/или ротационной щеткой). Щеточный валик может приводиться в движение электромотором. В пассивной напольной насадке нет щеточного валика.
В описанных роботах-пылесосах на основе конструкции в целом возможно достижение очень хорошей эффективности и производительности всасывания также и с пассивной напольной насадкой, то есть без щеточного валика. При применении пассивных напольных насадок конструкция упрощается и тем самым также уменьшается вес напольной насадки, вследствие чего привод напольной насадки имеет меньшую потребляемую мощность
Описанные роботы-пылесосы предназначены для самостоятельного, или автономного обхода очищаемой площади.
Возможно включение в описанные роботы-пылесосы устройств управления и навигации для самостоятельного перемещения напольной насадки и/или блока пылесборника. Это позволяет осуществлять автономную уборку пыли роботом-пылесосом. Устройство управления и навигации может быть предназначено, в частности, для управления приводным устройством блока пылесборника, приводным устройством напольной насадки и/или блоком электровентилятора. Устройство управления и навигации может быть расположено на блоке пылесборника или внутри него и/или на напольной насадке или внутри нее. В частности, возможно расположение устройства управления и навигации исключительно на блоке пылесборника или внутри него. В этом случае управление напольной насадкой и ее навигация также может осуществляться на стороне блока пылесборника.
В описанных роботах-пылесосах возможно наличие устройства для передачи управляющих сигналов от устройства управления и навигации к напольной насадке. Устройство для передачи управляющих сигналов может быть выполнено с возможностью осуществления проводной или беспроводной передачи.
Описанные роботы-пылесосы могут содержать одно или более устройств определения местоположения. Под устройствами определения местоположения могут подразумеваться, в частности, камеры, датчики перемещения и/или датчики расстояния. Датчики расстояния могут работать, например, на основе звуковых волн или на основе электромагнитных волн. Возможно расположение устройств определения местоположения на блоке пылесборника или внутри него и/или на напольной насадке или внутри нее.
Возможно электропитание описанных роботов-пылесосов без использования кабеля. В частности, возможно наличие в них аккумуляторов для питания.
Возможно наличие в блоке пылесборника подъемного устройства для изменения высоты нижней поверхности блока пылесборника, в частности, нижней поверхности корпуса блока пылесборника, над полом. Таким образом, возможно регулирование расстояния до низа блока пылесборника, или высоты его положения. Это позволяет повышать, например, в положении при зарядке робота-пылесоса, высоту нижней поверхности над полом, чтобы ввезти напольную насадку под блок пылесборника, или, соответственно, под его корпус.
Дальнейшие признаки описываются посредством чертежей, на которых показаны:
фиг. 1 вариант осуществления робота-пылесоса, состоящего из двух частей;
фиг. 2 блок-схема робота-пылесоса, состоящего из двух частей;
Фиг. 3 второй вариант осуществления робот-пылесоса.
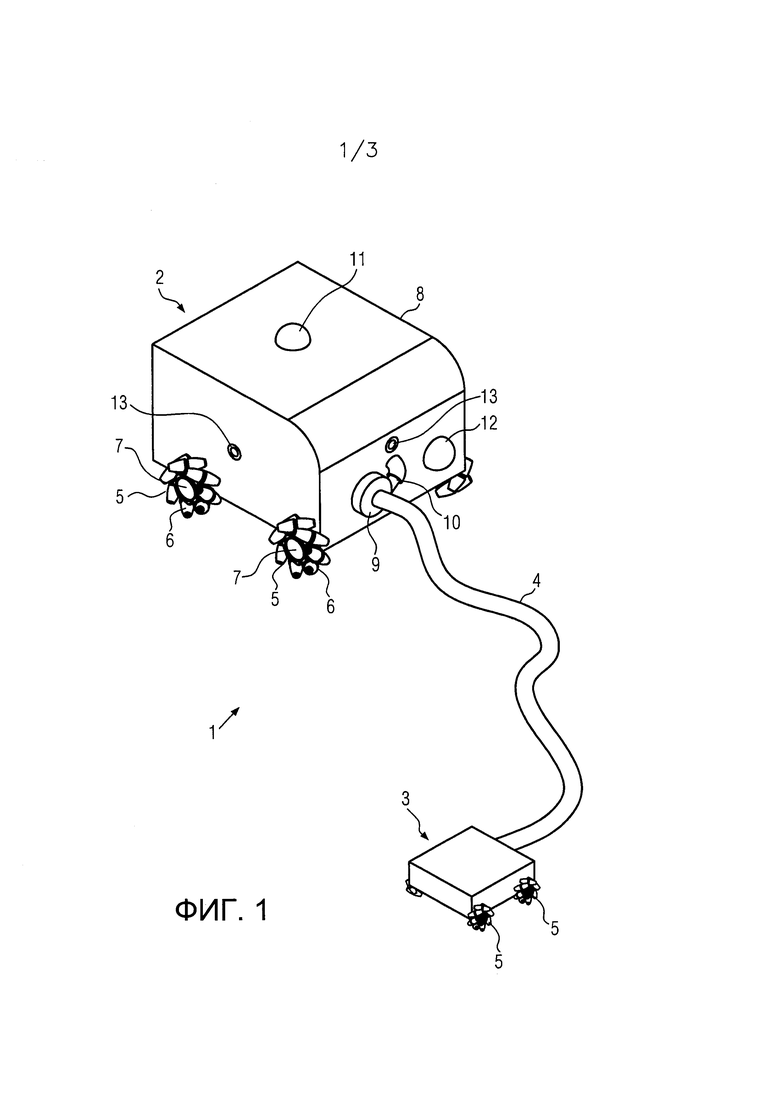
Фиг. 1 представляет собой схематичное изображение первого варианта осуществления робота-пылесоса 1. Показанный робот-пылесос 1 содержит блок 2 пылесборника и напольную насадку 3, которая соединена с блоком 2 пылесборника посредством гибкого всасывающего шланга 4. Таким образом, конструкция робота-пылесоса 1 состоит из двух частей, причем блок 2 пылесборника и напольная насадка 3 образуют отдельные узлы, которые соединены друг с другом только всасывающим шлангом 4.
Блок 2 пылесборника установлен на четырех колесах 5, причем каждое из этих колес выполнено в виде всенаправленного колеса. Каждое всенаправленное колесо 5 имеет на своей поверхности некоторое количество роликов 6, выполненных с возможностью поворота. Все оси вращения роликов 6 не параллельны колесной оси 7 соответствующего всенаправленного колеса. Так, например, оси вращения роликов могут проходить под углом 45° к соответствующей колесной оси. Поверхности роликов или, соответственно, тел качения, выпуклая или, соответственно, дугообразная.
Примеры таких всенаправленных колес описаны в US 3876255, US 2013/0292918, DE 102008019976 или DE 202013008870.
Блок 2 пылесборника имеет приводное устройство для приведения в движение колес 5 блока пылесборника. Возможно наличие в приводном устройстве отдельных приводных узлов для каждого колеса 5, например, в форме электродвигателей, так что каждое колесо 5 приводится в движение независимо от других колес. Ролики 6 помещены с возможностью поворота без привода.
Благодаря соответствующему приводу отдельных или всех колес 5 блок 2 пылесборника обеспечивает возможность его перемещения в любых направлениях. Если, например, все четыре колеса 5 вращаются с одной и той же скоростью в одном и том же направлении, то блок пылесборника едет прямо. Движение колес на одной стороне в противоположных направлениях позволяет осуществлять перемещение вбок или сдвиг.
По существу не обязательно все колеса должны быть выполнены с возможностью привода; могут быть предусмотрены также отдельные колеса, не имеющие собственного привода. Кроме того, также возможно, что для выполнения определенных перемещений отдельные колеса не приводятся в движение, даже если они по существу выполнены с возможностью привода.
В альтернативных вариантах осуществления возможно также выполнение в форме всенаправленных колес большего или меньшего количества колес, чем четыре. Пример с тремя всенаправленными колесами описан в US 2007/0272463.
Напольная насадка 3 в показанном примере также оборудована четырьмя всенаправленными колесами 5. Эти колеса в варианте осуществления меньше по размеру, чем колеса блока 2 пылесборника. Напольная насадка 3 также имеет приводное устройство для колес 5 в аналогичной форме. Здесь приводное устройство для каждого колеса также содержит отдельный приводной узел, например, в виде электродвигателя, чтобы приводить в движение каждое колесо отдельно и независимо от остальных колес. Это позволяет перемещать напольную насадку также в любых направлениях путем приведения в движение колес надлежащим образом.
Напольная насадка 3 имеет опорную пластину с поверхностью основания, которая при эксплуатации робота-пылесоса обращена к полу, т.е. к очищаемой поверхности. В опорной пластине проведены параллельно поверхности основания один или более каналов для потока воздуха, через которые всасывается загрязненный воздух. Канал или каналы для потока воздуха могут иметь предусмотренное в опорной пластине боковое отверстие. Возможно выполнение канала для потока воздуха прямым или изогнутым, или, в частности, его выполнение в форме кольца либо участка кольца. Форма участка кольца или кольца может оказаться предпочтительной, в частности, для боковых перемещений напольной насадки.
В показанных примерах блок 2 пылесборника имеет корпус 8, на котором сверху расположен блок 9 электровентилятора. От блока 9 электровентилятора патрубок 10 ведет к фильтровальному мешку пылесоса, образующему пылеуловитель. Фильтровальный мешок пылесоса может быть укреплен съемным образом внутри корпуса 8 обычным способом, например, посредством удерживающей пластины.
Таким образом, в показанной конструкции осуществляется сквозное сообщающееся соединение по текучей среде, или аэродинамическое соединение, с пылеуловителем через напольную насадку 3, всасывающий шланг 4, блок 9 электровентилятора и патрубок 10. При этом блок 9 электровентилятора расположен между всасывающим шлангом 4 и пылеуловителем, так что загрязненный воздух, всасываемый через напольную насадку, проходит сквозь блок 9 электровентилятора (в частности, через патрубок 10) в фильтровальный мешок пылесоса, расположенный внутри корпуса 8.
Таким образом, под блоком 9 электровентилятора подразумевается Dirty-Air-Motor, или двигатель на загрязненном воздухе. Речь идет, в частности, о блоке электровентилятора, который содержит центробежный вентилятор.
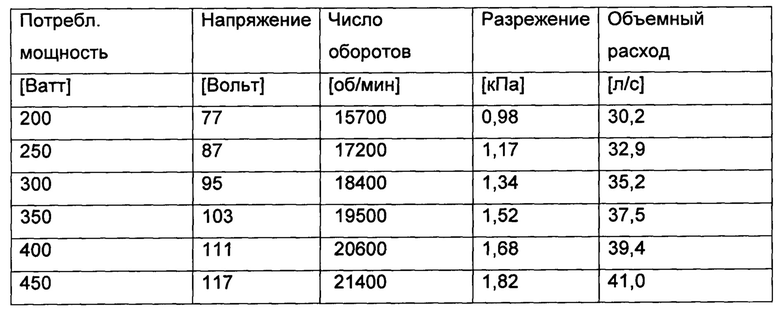
Блок электровентилятора при потребляемой электрической мощности менее 450 Вт создает объемный расход, превышающий 30 л/с (определяемый согласно стандарту DIN EN 603121:201401 при 8-м размере отверстия контрольной заслонки), при потребляемой электрической мощности менее 250 Вт - объемный расход, превышающий 25 л/с, и при потребляемой электрической мощности менее 100 Вт - объемный расход, превышающий 10 л/с.
Диаметр вентилятора может составлять от 60 мм до 160 мм. Например, может использоваться блок электровентилятора фирмы АМЕТЕК, Inc, который применяется также в вертикальных пылесосах Soniclean (например, SONICLEAN VT PLUS).
Блок электровентилятора в пылесосе SONICLEAN VT PLUS соответствует стандарту DIN EN 603121:201401, как разъяснено выше. Измерения на блоке электровентилятора производились без корпуса пылесоса. Относительно необходимых промежуточных элементов для подключения к измерительной камере действуют указания раздела 7.3.7.1. В таблице показано, что при низком числе оборотов и незначительной потребляемой мощности достигаются высокие значения объемного расхода.
Электровентилятор АМЕТЕК "на загрязненном воздухе" (диаметр рабочего колеса 82 мм) при 8-м размере отверстия контрольной заслонки (40 мм)
В процессе эксплуатации блок 9 электровентилятора всасывает воздух. При этом поток воздуха входит в робот-пылесос 1 через отверстие напольной насадки 3 и проводится через всасывающий шланг 4 в блок 9 электровентилятора. На основе расположения блока 9 электровентилятора - в направлении движения потока воздуха - перед пылеуловителем (в форме фильтровального мешка пылесоса), в корпусе 8, так же, как и в пылеуловителе, существует избыточное давление.
В обычных пылесосах блок электровентилятора расположен в блоке пылесборника, в направлении движения потока воздуха - позади пылеуловителя, то есть, например, за фильтровальным мешком пылесоса; это приводит к тому, что, в частности, в корпусе блока пылесборника создается разрежение. Чтобы избегать деформации корпуса вследствие разрежения, его обычно приходится усиливать. При конфигурации, проиллюстрированной на фиг. 1, вследствие избыточного давления в корпусе это не требуется или требуется только в небольшой степени.
Робот-пылесос 1 содержит устройство управления и навигации для самостоятельного перемещения блока 2 пылесборника и напольной насадки 3. Для этого в корпусе 8 блока 2 пылесборника расположен соответствующим образом запрограммированный микроконтроллер. Устройство управления и навигации связано с устройствами определения местоположения. К ним относятся камеры 11 и 12, а также датчики 13 расстояния. Под датчиками расстояния могут подразумеваться, например, лазерные датчики.
Навигация робота-пылесоса производится известным способом, как описано, например, в WO 02/074150. Расположенное в корпусе 8 устройство управления и навигации управляет как приводным узлом блока 2 пылесборника, так и приводным узлом напольной насадки 3.
Для последней предусмотрено устройство для передачи управляющих сигналов от устройства управления и навигации в корпусе 8 блока 2 пылесборника к напольной насадке 3, в частности, к приводному устройству напольной насадки. Для этого возможно размещение беспроводных передатчика/приемника соответственно на стороне блока 2 пылесборника и на стороне напольной насадки 3. В альтернативном варианте для передачи управляющих сигналов также возможно проводное соединение, предусмотренное вдоль всасывающего шланга.
Напольная насадка 3 также может содержать одно или более устройств, поддерживающих определение местоположения. Например, в напольной насадке могут быть предусмотрены датчики перемещения и/или датчики расстояния. Чтобы использовать соответствующие сведения для управления и навигации, соответствующие сигналы от напольной насадки передаются к устройству управления и навигации.
Электропитание робота-пылесоса может осуществляться без кабеля. Питание напольной насадки, в частности, ее приводного устройства, происходит посредством кабеля питания, проходящего внутри всасывающего шланга 4 или вдоль него.
Альтернативно или дополнительно возможно также наличие в блоке 2 пылесборника аккумуляторов, которые могут заряжаться, например, посредством кабеля или без кабеля (индуктивно). Для зарядки аккумуляторов пылесос 1 может, например, автоматически перемещаться к положению для зарядки. Если питание приводного устройства напольной насадки не производится исключительно посредством электрического соединения по всасывающему шлангу 4, то возможно также наличие аккумулятора в самой напольной насадке 3.
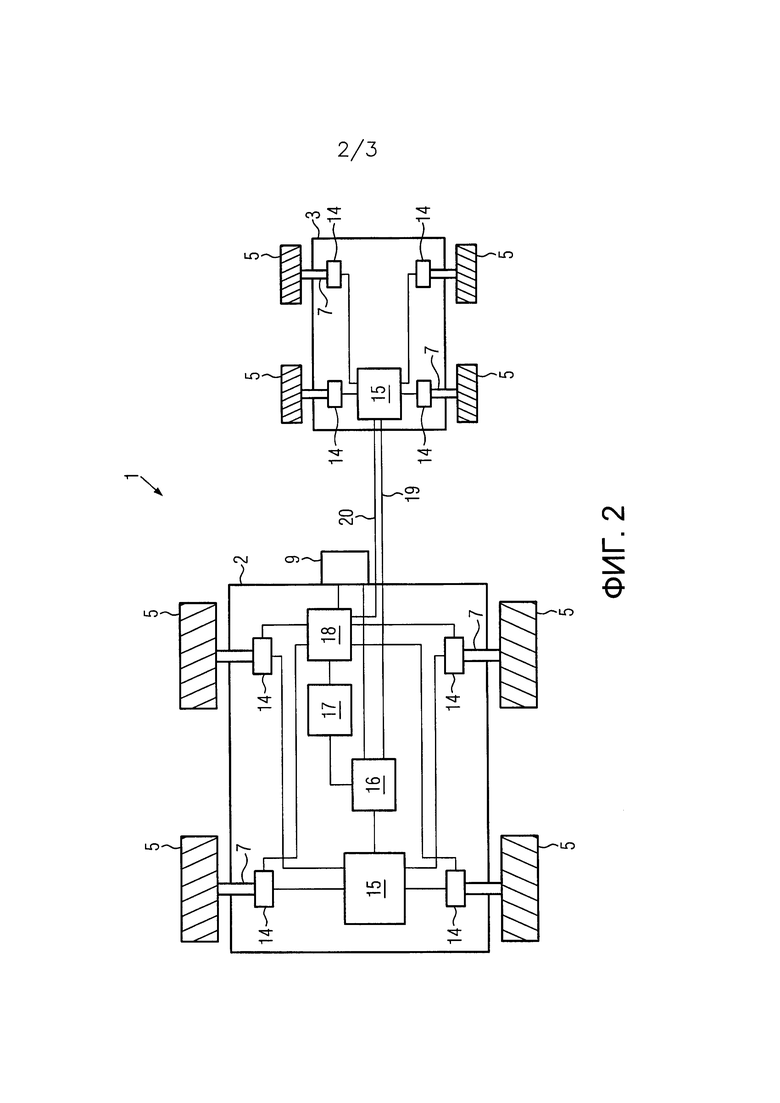
Фиг. 2 представляет собой принципиальную блок-схему робота-пылесоса 1 с блоком 2 пылесборника и напольной насадкой 3. Приводное устройство для колес 5 блока 2 пылесборника содержит, во-первых, четыре приводных узла 14 в форме электродвигателей и, во-вторых, микроконтроллер 15 для управления электродвигателями.
В блоке 2 пылесборника предусмотрено, кроме того, устройство 16 управления и навигации, которое служит для самостоятельного передвижения блока пылесборника и напольной насадки. Устройство 16 управления и навигации соединено как с микроконтроллером 15 приводного устройства, так и с еще одним микроконтроллером 17, который представляет собой часть устройства определения местоположения. В микроконтроллере 17 сигналы с данными от разных датчиков и/или камер обрабатываются и предоставляются устройству 16 управления и навигации.
Кроме того, устройство 16 управления и навигации соединено с блоком 9 электровентилятора для управления им.
Электропитание, или подача напряжения, в показанном примере производится посредством аккумулятора 18, который может заряжаться беспроводным способом или посредством провода. Возможно осуществление зарядки в зарядной станции, на которую робот заезжает самостоятельно. Дополнительно в зарядной станции возможна автоматическая очистка пылесборной камеры (например, высасывание ее содержимого), чтобы повышать производительность устройства, то есть расширять для него зону досягаемости. Дополнительно имеется также возможность вычищать в зарядной станции выходной фильтр. Это тоже позволяет увеличивать время эксплуатации. Чтобы минимизировать площадь, занимаемую роботом в зарядной станции, в режиме зарядки или очистки напольная насадка может помещаться под блоком пылесборника. Для этого блок пылесборника автоматически поднимают с применением подъемного устройства и, таким образом, увеличивают высоту его расположения над полом (просвета), так что имеется возможность ввести напольную насадку под него.
На чертеже для большей наглядности отображены не все соединения, служащие для элекропитания.
Напольная насадка 3 также имеет приводное устройство для ее четырех колес 5, причем приводное устройство, как и в случае блока 2 пылесборника, содержит микроконтроллер 15, а также четыре электродвигателя 14. Управляющие сигналы для приводного устройства напольной насадки 3 поступают от устройства 16 управления и навигации, которое расположено в блоке 2 пылесборника. Передача сигналов происходит посредством проводного соединения 19, которое может быть расположено, например, в стенке всасывающего шланга. Однако в альтернативном случае эта передача сигнала могла бы производиться также беспроводным образом.
Электропитание и подача напряжения производится посредством аккумулятора 18 блока 2 пылесборника. Для этого предусмотрен провод 20, который расположен в стенке всасывающего шланга.
В примере, показанном на фиг. 1, рассматривается пылесос с фильтровальным мешком. Это значит, что в блоке 2 пылесборника пылесоса расположен фильтровальный мешок, в котором отделяется всасываемая грязь и пыль. Под этим фильтровальным мешком пылесоса может подразумеваться, в частности, плоский пакет, стенки которого включают в себя один или более слоев нетканого материала и/или нетканого полотна. Пакет фильтра пылесоса выполнен в виде одноразового мешка.
При использовании, в частности, однослойных пылесборных мешков, у которых стенка пакета состоит, например, именно из одного слоя нетканого полотна в форме фильерного нетканого полотна, предпочтительно применение выходного фильтра. При помощи выходного фильтра возможно отфильтровывание мелкодисперсной пыли, которая не была отделена в фильтровальном мешке пылесоса. Такой выходной фильтр может иметь поверхность площадью по меньшей мере 800 см2. Возможно, в частности, его выполнение в складчатом или плиссированном виде, чтобы он имел большую поверхность при меньшей (чем его поверхность) площади основания.
Всасывающий шланг 4 в типичном случае имеет диаметр в диапазоне от 25 мм до 50 мм и длину в диапазоне от 500 мм до 2500 мм.
В качестве альтернативы к описанному выше возможен также робот-пылесос без фильтровального мешка, в нем блок 2 пылесборника содержит центробежный, или циклонный, уловитель 10, в котором всасываемые частицы загрязнений и пыль сепарируются посредством центробежной силы. В альтернативном варианте выполнение пылесоса без фильтровального мешка возможно также в виде отбойного пылеуловителя.
В частности, в случае пылесоса без фильтровального мешка пылесборное устройство 2 имеет выходной фильтр, где фильтруется мелкодисперсная пыль, которая не была отделена в центробежном пылеуловителе. Этот выходной фильтр может иметь поверхность площадью по меньшей мере 800 см2. Возможно, в частности, его выполнение в складчатом или плиссированном виде, чтобы он имел большую поверхность при меньшей площади основания. При этом возможно расположение предусмотренного выходного фильтра в крепежном приспособлении, как оно описано в Европейской заявке на изобретение ЕР 14179375.2.
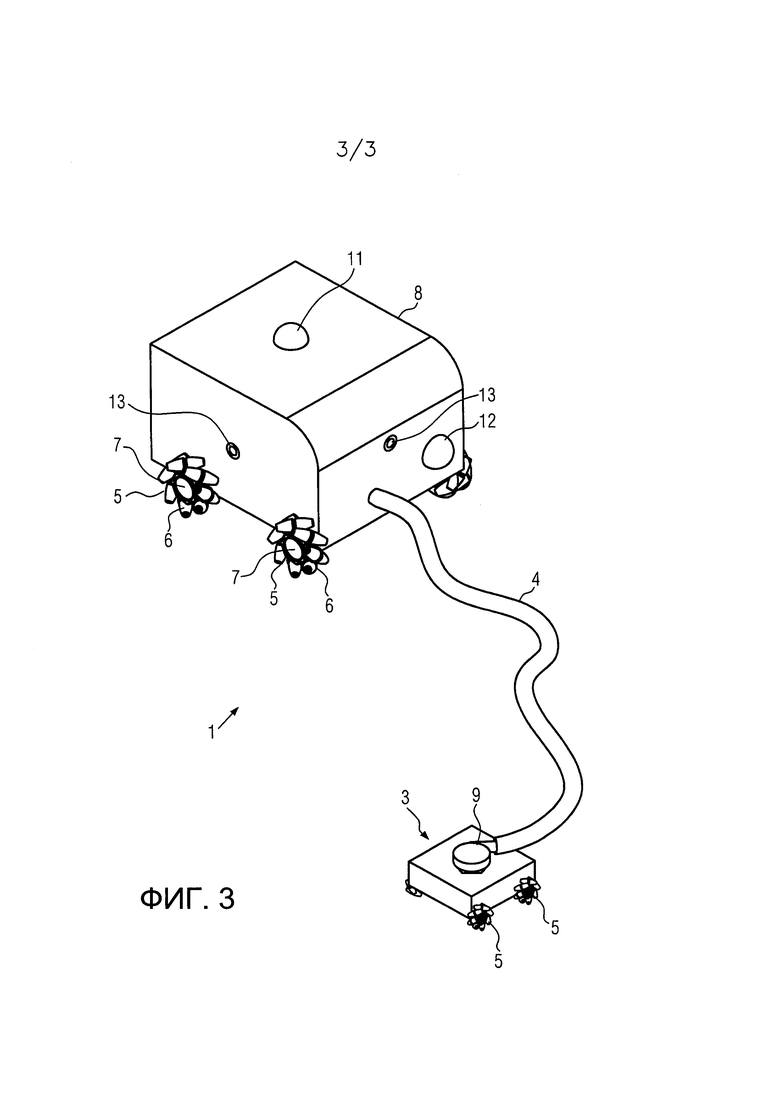
Фиг. 3 иллюстрирует альтернативный вариант осуществления в схематичном виде, на котором для таких же элементов, как на фиг. 1, используются те же самые обозначения. В примере, показанном на фиг. 3, блок 9 электровентилятора расположен на напольной насадке 3.
Под блоком 9 электровентилятора подразумевается опять-таки Dirty-Air-Motor, или двигатель на загрязненном воздухе, с центробежным вентилятором. Блок электровентилятора имеет рабочее колесо, ось которого при его надлежащем использовании расположена параллельно всасывающей поверхности и перпендикулярно надлежащему направлению перемещения напольной насадки.
В процессе эксплуатации блок 9 электровентилятора всасывает воздух. При этом поток воздуха входит в робот-пылесос 1 через отверстие напольной насадки 3, проходит через блок 9 электровентилятора и затем поступает во всасывающий шланг 4. Вследствие расположения блока 9 электровентилятора на напольной насадке 3 и - в направлении движения потока воздуха - перед всасывающим шлангом 4, во всасывающем шланге 4 и в блоке 2 пылесборника создается избыточное давление.
В остальном в примере с фиг. 3 находят применение признаки, описанные также в сочетании с фиг. 1.
В описанных вариантах осуществления наличие щеточного валика (например, выбивальной щетки и/или вращающейся щетки) в напольной насадке 3 или на ней не обязательно.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ - ПЫЛЕСОС | 2015 |
|
RU2669036C1 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2665457C1 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2674707C1 |
| НАПОЛЬНЫЙ ПЫЛЕСОС | 2015 |
|
RU2667882C1 |
| НАПОЛЬНЫЙ ПЫЛЕСОС | 2015 |
|
RU2674866C1 |
| Автономный напольный пылесос, способ уборки пылесосом и применение автономного напольного пылесоса | 2016 |
|
RU2712350C2 |
| НАПОЛЬНЫЙ ПЫЛЕСОС | 2017 |
|
RU2728134C1 |
| СПОСОБ ОПТИМИЗИРОВАНИЯ УСТРОЙСТВА ДЛЯ ВСАСЫВАНИЯ ПЫЛИ, СОДЕРЖАЩЕГО НАПОЛЬНЫЙ ИЛИ ВЕРТИКАЛЬНЫЙ ПЫЛЕСОС И ФИЛЬТРОВАЛЬНЫЙ МЕШОК | 2013 |
|
RU2623670C2 |
| СПОСОБ ОПТИМИЗИРОВАНИЯ УСТРОЙСТВА ДЛЯ ВСАСЫВАНИЯ ПЫЛИ, СОДЕРЖАЩЕГО РУЧНОЙ, КОМПАКТНЫЙ ИЛИ ВЕРТИКАЛЬНЫЙ ПЫЛЕСОС И ФИЛЬТРОВАЛЬНЫЙ МЕШОК | 2013 |
|
RU2620483C2 |
| УСТРОЙСТВО ДЛЯ ВСАСЫВАНИЯ ПЫЛИ, СОДЕРЖАЩЕЕ ПЫЛЕСОС И ФИЛЬТРОВАЛЬНЫЙ МЕШОК | 2012 |
|
RU2573818C2 |
Изобретение относится к роботу-пылесосу (1), содержащему блок (2) пылесборника, установленный на колесах (5), всасывающий шланг (4) и установленную на колесах (5) напольную насадку (3), причем напольная насадка (3) сообщается по текучей среде с блоком (2) пылесборника посредством всасывающего шланга (4), а также блок (9) электровентилятора для всасывания потока воздуха через напольную насадку (3), причем блок (9) электровентилятора расположен между напольной насадкой (3) и блоком (2) пылесборника таким образом, что всасываемый через напольную насадку (3) поток воздуха проходит через блок (9) электровентилятора в блок (2) пылесборника, причем блок (2) пылесборника имеет приводное устройство (14, 15) для приведения в движение по меньшей мере одного из колес (5) блока (2) пылесборника, а напольная насадка (3) имеет приводное устройство (14, 15) для приведения в движение по меньшей мере одного из колес (5) напольной насадки (3). 16 з.п. ф-лы, 3 ил., 1 табл. 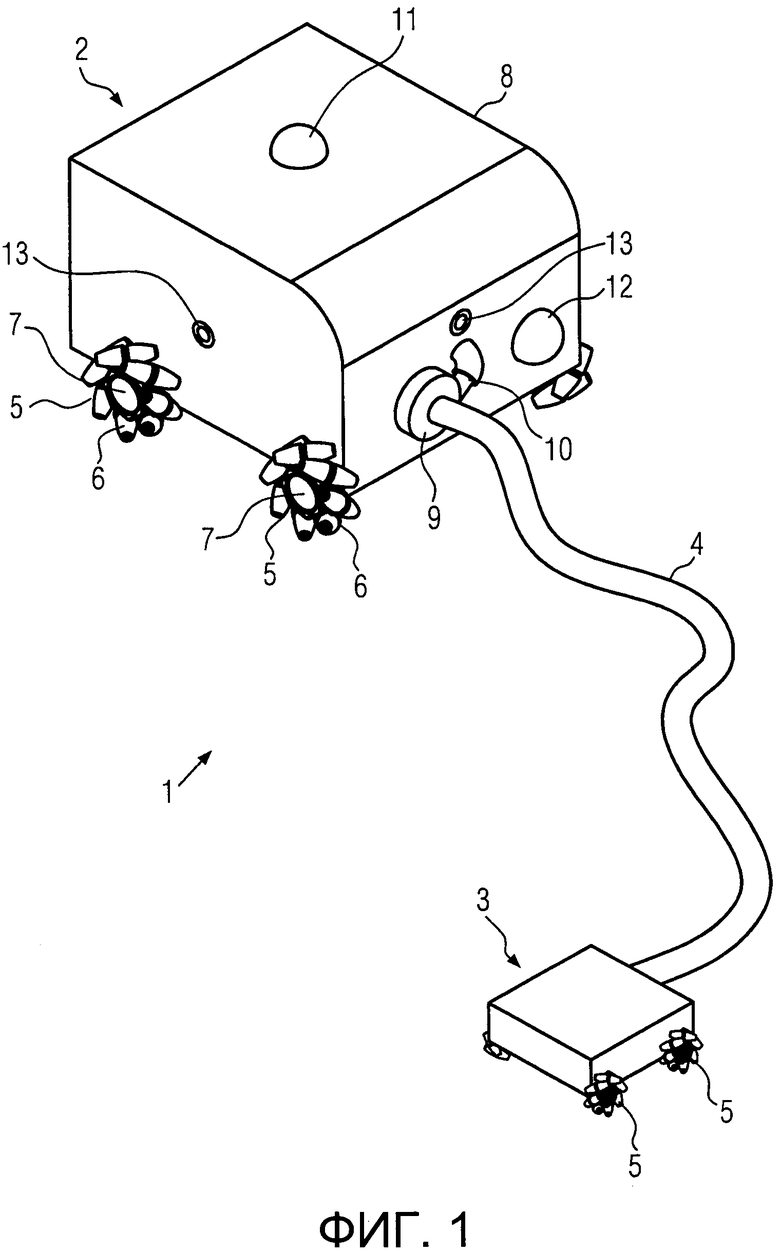
1. Робот-пылесос (1), содержащий блок (2) пылесборника, установленный на колесах (5), всасывающий шланг (4) и установленную на колесах (5) напольную насадку (3), причем напольная насадка сообщается по текучей среде с блоком пылесборника посредством всасывающего шланга,
а также блок (9) электровентилятора для всасывания потока воздуха через напольную насадку, причем блок электровентилятора расположен между напольной насадкой и блоком пылесборника таким образом, что обеспечено прохождение всасываемого через напольную насадку потока воздуха через блок электровентилятора в блок пылесборника,
причем блок пылесборника имеет приводное устройство (14, 15) для приведения в движение по меньшей мере одного из колес блока пылесборника, а напольная насадка имеет приводное устройство (14, 15) для приведения в движение по меньшей мере одного из колес напольной насадки.
2. Робот-пылесос по п. 1, в котором блок электровентилятора расположен между напольной насадкой и всасывающим шлангом таким образом, что всасываемый через напольную насадку поток воздуха проходит через блок электровентилятора во всасывающий шланг.
3. Робот-пылесос по п. 1 или 2, в котором блок электровентилятора расположен на напольной насадке и/или над ней, в частности, непосредственно на напольной насадке и/или над ней.
4. Робот-пылесос по п. 1, в котором блок электровентилятора расположен между всасывающим шлангом и блоком пылесборника таким образом, что обеспечено прохождение всасываемого через напольную насадку потока воздуха через всасывающий шланг в блок электровентилятора и через блок электровентилятора в блок пылесборника.
5. Робот-пылесос по одному из предшествующих пунктов, в котором блок пылесборника содержит корпус и расположенный в корпусе пылеуловитель, причем блок электровентилятора расположен на корпусе, у корпуса или внутри корпуса.
6. Робот-пылесос по одному из предшествующих пунктов, в котором одно из колес, несколько колес или все колеса блока пылесборника и/или одно из колес, несколько колес или все колеса напольной насадки представляют собой всенаправленные колеса.
7. Робот-пылесос по одному из предшествующих пунктов, в котором блок электровентилятора выполнен таким образом, что при потребляемой электрической мощности менее 450 Вт по стандарту DIN EN 60312-1 и при 8-м размере отверстия контрольной заслонки он создает объемный расход, превышающий 30 л/с, при потребляемой электрической мощности менее 250 Вт по стандарту DIN EN 60312-1 и при 8-м размере отверстия контрольной заслонки он создает объемный расход, превышающий 25 л/с, и/или при потребляемой электрической мощности менее 100 Вт по стандарту DIN EN 60312-1 и при 8-м размере отверстия контрольной заслонки он создает объемный расход, превышающий 10 л/с.
8. Робот-пылесос по одному из предшествующих пунктов, в котором всасывающий шланг имеет диаметр в диапазоне от 25 до 50 мм и/или длину в диапазоне от 500 до 2500 мм.
9. Робот-пылесос по одному из предшествующих пунктов, содержащий выходной фильтр, в частности, с площадью фильтра, составляющей по меньшей мере 800 см2.
10. Робот-пылесос по одному из предшествующих пунктов, в котором робот-пылесос представляет собой пылесос с мешком, в частности, с площадью фильтра, составляющей по меньшей мере 800 см2.
11. Робот-пылесос по п. 10, содержащий фильтровальный мешок пылесоса, который выполнен в форме плоского пакета и/или в виде одноразового пакета, и/или в котором стенка пакета фильтровального мешка пылесоса содержит один или более слоев нетканого материала и/или один или более слоев нетканого полотна.
12. Робот-пылесос по одному из пп. 1-9, в котором робот-пылесос представляет собой пылесос без мешка, в частности, имеющий выходной фильтр с площадью фильтра, составляющей по меньшей мере 800 см2.
13. Робот-пылесос по п. 12, в котором блок пылесборника содержит отбойный пылеуловитель или центробежный пылеуловитель.
14. Робот-пылесос по одному из предшествующих пунктов, в котором блок электровентилятора содержит центробежный вентилятор.
15. Робот-пылесос по одному из предшествующих пунктов, в котором напольная насадка не имеет вращающейся щетки.
16. Робот-пылесос по одному из предшествующих пунктов, содержащий устройство (16) управления и навигации для самостоятельного перемещения напольной насадки и/или блока пылесборника.
17. Робот-пылесос по одному из предшествующих пунктов, содержащий одно или более устройств (11; 12; 13) определения местоположения.
| СПОСОБ ПОЛУЧЕНИЯ МИНЕРАЛЬНОГО ВЯЖУЩЕГО | 1993 |
|
RU2074150C1 |
| US 2003202890 A1, 30.10.2003 | |||
| WO 02058527 A1, 01.08.2002 | |||
| US 4369543 A, 25.01.1983 | |||
| US 5012886 A, 07.05.1991. | |||

