Область техники, к которой относится изобретение
[001] Изобретение относится к предоставлению тревожных оповещений водителю транспортного средства.
Уровень техники
[002] Современные транспортные средства предусматривают множество датчиков, которые предупреждают водителя об условиях, которые требуют внимания водителя. Например, система обнаружения слепой зоны может предупреждать водителя транспортного средства в слепой зоне водителя. Система определения полосы движения может предупреждать водителя о том, что транспортное средство уходит со своей полосы движения. Тревожное оповещение о заднем поперечном движении может предупреждать водителя во время движения задним ходом о том, что транспортное средство или пешеход намеревается пересекать дорогу позади транспортного средства.
[003] С быстрым распространением таких многочисленных систем датчиков и предупреждений они могут становиться зонированными для водителя. В частности, когда тревожные оповещения включают в себя визуальный компонент, водителю требуется мельком взглянуть на предупреждающий индикатор или экран, чтобы определять сущность предупредительного сигнала.
Сущность изобретения
[004] Системы и способы, описанные в данном документе, предоставляют улучшенный подход для реализации тревожных оповещений, которые более легко обрабатываются водителем.
В частности, в одном аспекте изобретения раскрывается способ, содержащий этапы, на которых, посредством контроллера транспортного средства: принимают данные датчиков от множества датчиков транспортного средства; формируют программные объекты, соответствующие данным датчиков; модифицируют программные объекты в реальном времени на основе обновленных данных от датчиков транспортного средства; и формируют трехмерные (3D) акустические сигналы с помощью множества динамиков согласно программным объектам, чтобы передавать информацию транспортного средства водителю.
В одном из вариантов осуществления формирование программных объектов, соответствующих данным датчиков, содержит этапы, на которых: обнаруживают в данных датчиков присутствие внешнего признака и местоположение признака для упомянутого внешнего признака; и создают программный объект признака для упомянутого внешнего признака и получают местоположение признака, ассоциированное с ним.
В одном из вариантов осуществления модификация программных объектов в реальном времени на основе обновленных данных от датчиков транспортного средства содержит этапы, на которых: обнаруживают перемещение упомянутого внешнего признака относительно данного транспортного средства в обновленных данных в обновленное местоположение; и модифицируют местоположение признака согласно обновленному местоположению в программном объекте признака.
В одном из вариантов осуществления формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам содержит этап, на котором: формируют звуковой сигнал признака, имеющий смоделированное местоположение в выходных сигналах множества динамиков, соответствующее местоположению признака программного объекта признака.
В одном из вариантов осуществления датчики транспортного средства содержат, по меньшей мере, один из ультразвукового датчика, датчика радиообнаружения и определения дальности (радар), датчика светового обнаружения и определения дальности (лидар), камеры, и датчика звуковой навигации и определения дальности (сонар).
В одном из вариантов осуществления формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам содержит этап, на котором: формируют последовательность слышимых звуков, имеющих разделение между слышимыми звуками, которое уменьшается с уменьшением расстояния между местоположением признака и транспортным средством.
В одном из вариантов осуществления формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам содержит этап, на котором: формируют последовательность слышимых звуков, имеющих один или более акустических показателей, эффективных для передачи, по меньшей мере, одного из местоположения внешнего признака относительно транспортного средства, типа внешнего признака, относительного уровня угрозы внешнего признака, расстояния между транспортным средством и внешним признаком и скорости изменения расстояния.
В одном из вариантов осуществления формирование программных объектов, соответствующих данным датчиков, содержит этапы, на которых: обнаруживают в данных датчиков присутствие поперечного движения позади транспортного средства в данных датчиков; и создают программный объект признака для поперечного движения; при этом формирование 3D-акустических сигналов с помощью множества датчиков согласно программным объектам, чтобы передавать информацию о транспортном средстве водителю, содержит этап, на котором формируют последовательность акустических сигналов, моделирующих перемещение источника звука позади водителя транспортного средства в направлении поперечного движения.
В одном из вариантов осуществления прием данных датчиков от множества датчиков транспортного средства содержит этап, на котором принимают выходной сигнал датчика двери, указывающий, что дверь неплотно закрыта, причем способ дополнительно содержит этапы, на которых: формируют программный объект неплотно закрытой двери, имеющий местоположение, ассоциированное с ним, и изменяют местоположение, ассоциированное с программным объектом неплотно закрытой двери, в течение некоторого периода времени, чтобы указывать перемещение по направлению к двери; и формируют трехмерные (3D) акустические сигналы с помощью множества динамиков в течение упомянутого периода времени согласно текущему значению местоположения.
В одном из вариантов осуществления прием данных датчиков от множества датчиков транспортного средства содержит этап, на котором принимают сигналы, используемые контроллером для реализации одного или более из следующего: адаптивная система автоматического поддержания скорости; автоматическое экстренное торможение; автоматическая парковка; помощь в парковке; обнаружение слепой зоны; предотвращение столкновения; предупреждение об отклонении от полосы движения; помощь в поддержании полосы движения; навигация с помощью системы глобального позиционирования (GPS); мониторинг давления в шинах; и система управления силой сцепления с дорогой.
В другом аспекте изобретения раскрывается транспортное средство, содержащее: множество датчиков, функционирующих, чтобы определять рабочие параметры транспортного средства; множество динамиков, расположенных внутри салона транспортного средства; контроллер, функционально соединенный с множеством датчиков и множеством динамиков, причем контроллер запрограммирован, чтобы: принимать данные датчиков от множества датчиков; формировать программные объекты, соответствующие данным датчиков; модифицировать программные объекты в реальном времени на основе обновленных данных от датчиков транспортного средства; и формировать трехмерные (3D) акустические сигналы с помощью множества динамиков согласно программным объектам, чтобы передавать информацию транспортного средства водителю.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы формировать программные объекты, соответствующие данным датчиков, посредством: обнаружения в данных датчиков присутствия внешнего признака и местоположения признака для упомянутого внешнего признака; и создания программного объекта признака для упомянутого внешнего признака и получения местоположения признака, ассоциированного с ним.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы модифицировать программные объекты в реальном времени на основе обновленных данных от множества датчиков посредством: обнаружения перемещения упомянутого внешнего признака относительно данного транспортного средства в обновленных данных в обновленное местоположение; и модификации местоположения признака согласно обновленному местоположению в программном объекте признака.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы формировать 3D-акустические сигналы с помощью множества динамиков согласно программным объектам посредством: формирования звукового сигнала признака, имеющего смоделированное местоположение в выходных сигналах множества динамиков, соответствующее местоположению признака программного объекта признака.
В одном из вариантов осуществления множество датчиков содержит, по меньшей мере, один из ультразвукового датчика, датчика радиообнаружения и измерения дальности (радар), датчика светового обнаружения и определения дальности (лидар), камеры, и датчика звуковой навигации и определения дальности (сонар).
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы формировать 3D-акустические сигналы с помощью множества динамиков согласно программным объектам посредством: формирования последовательности слышимых звуков, имеющих разделение между слышимыми звуками, которое уменьшается с уменьшением расстояния между местоположением признака и транспортным средством.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы формировать 3D-акустические сигналы с помощью множества динамиков согласно программным объектам посредством: формирования последовательности слышимых звуков, причем интенсивность слышимых звуков увеличивается с уменьшением расстояния между местоположением признака и транспортным средством.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы формировать программные объекты, соответствующие данным датчиков, посредством: обнаружения в данных датчиков присутствия поперечного движения позади транспортного средства в данных датчиков; и создания программного объекта признака для поперечного движения; при этом формирование 3D-акустических сигналов с помощью множества датчиков согласно программным объектам, чтобы передавать информацию о транспортном средстве водителю, содержит формирование последовательности акустических сигналов, моделирующих перемещение источника звука позади водителя транспортного средства в направлении поперечного движения.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы: принимая данные датчиков от множества датчиков, принимать выходной сигнал датчика двери, указывающий, что дверь неплотно закрыта; формировать программный объект неплотно закрытой двери, имеющий местоположение, ассоциированное с ним, и изменять местоположение, ассоциированное с программным объектом неплотно закрытой двери, в течение некоторого периода времени, чтобы указывать перемещение по направлению к двери; и формировать трехмерные (3D) акустические сигналы с помощью множества динамиков в течение упомянутого периода времени согласно текущему значению местоположения.
В одном из вариантов осуществления контроллер дополнительно запрограммирован, чтобы, принимая данные датчиков от множества датчиков транспортного средства, принимать сигналы, используемые контроллером для реализации одного или более из следующего: адаптивная система автоматического поддержания скорости; автоматическое экстренное торможение; автоматическая парковка; помощь в парковке; обнаружение слепой зоны; предотвращение столкновения; предупреждение об отклонении от полосы движения; помощь в поддержании полосы движения; навигация с помощью системы глобального позиционирования (GPS); мониторинг давления в шинах; и система управления силой сцепления с дорогой.
Краткое описание чертежей
[005] Для простого понимания преимуществ изобретения, более подробное описание изобретения, кратко описанного выше, приводится в отношении конкретных вариантов осуществления, проиллюстрированных на прилагаемых чертежах. С пониманием того, что эти чертежи иллюстрируют только типичные варианты осуществления изобретения и в силу этого не должны рассматриваться как ограничивающие его объем, изобретение описывается и поясняется более конкретно и подробно посредством использования прилагаемых чертежей, на которых:
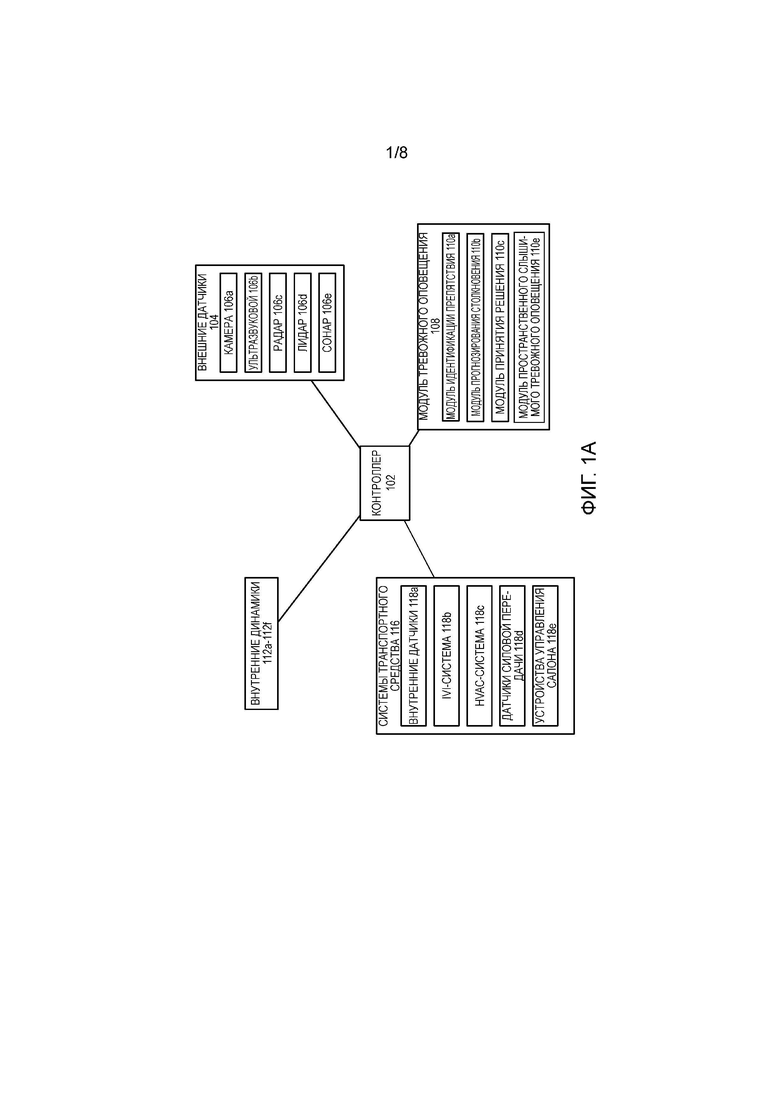
[006] Фиг. 1A - это схематичная блок-схема компонентов транспортного средства для реализации способов в соответствии с вариантом осуществления настоящего изобретения;
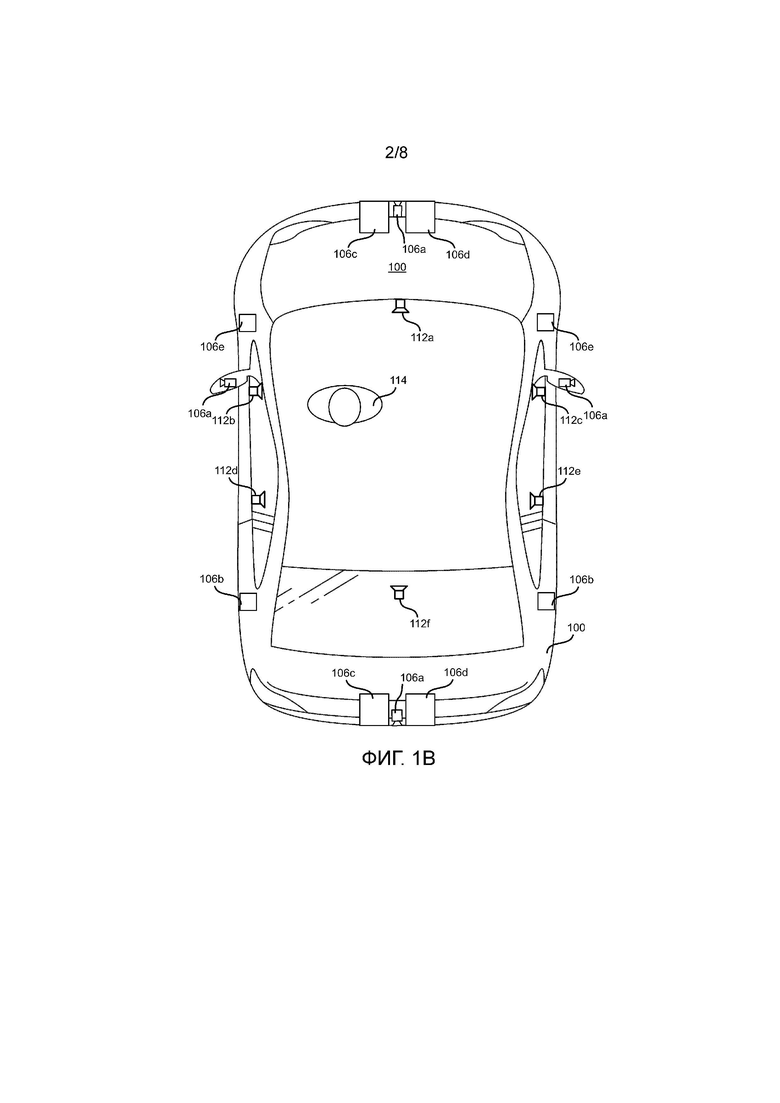
[007] Фиг. 1B - это схематичный чертеж транспортного средства, включающий в себя массив внутренних динамиков и внешних датчиков;
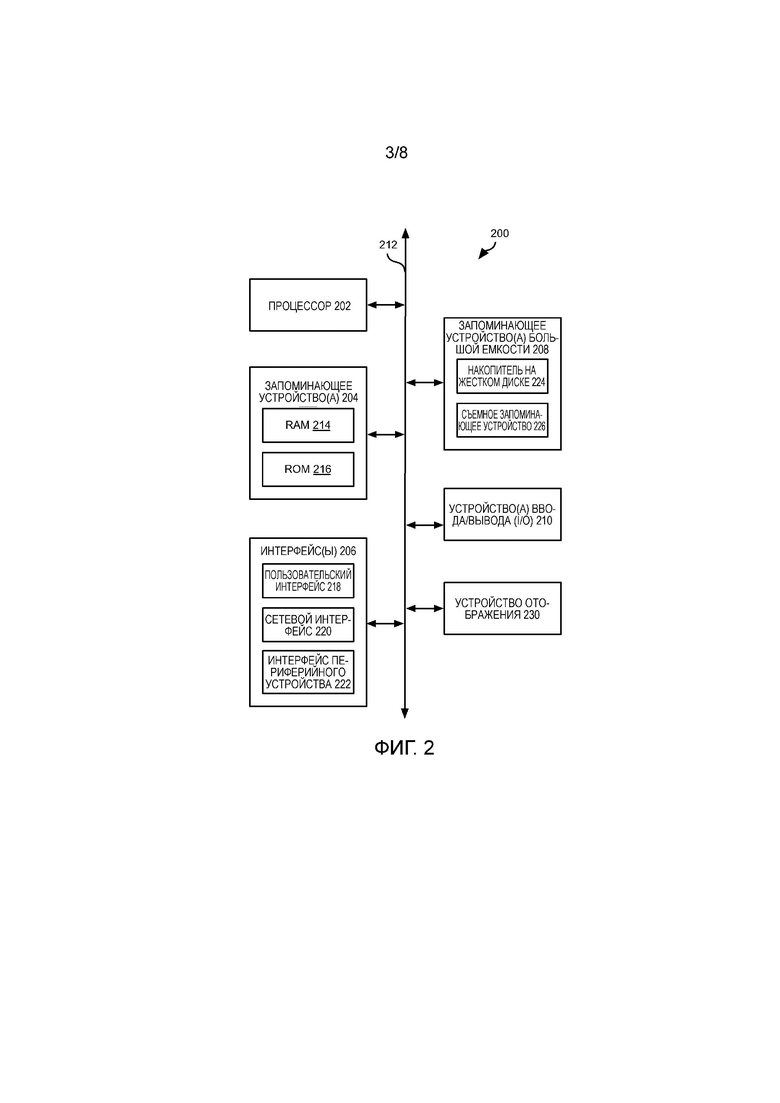
[008] Фиг. 2 - это схематичный чертеж вычислительных устройств для реализации способов, описанных в данном документе;
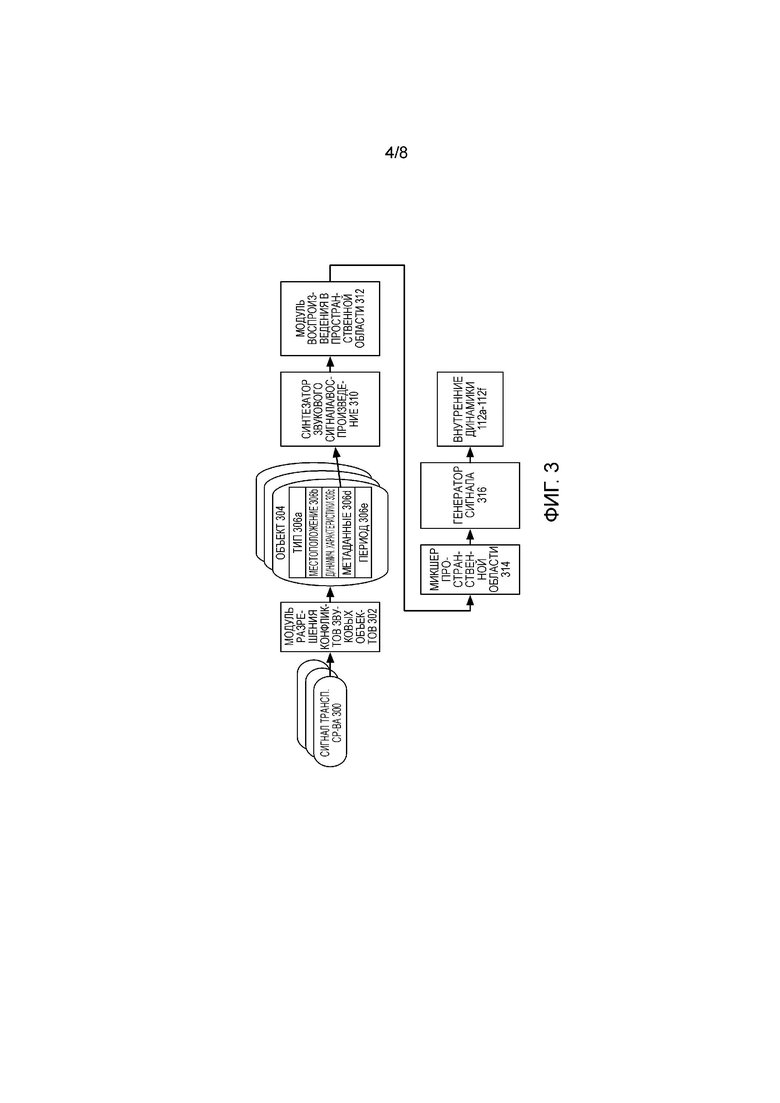
[009] Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая процесс обработки сигналов датчиков, чтобы формировать пространственные слышимые тревожные оповещения в соответствии с вариантом осуществления настоящего изобретения;
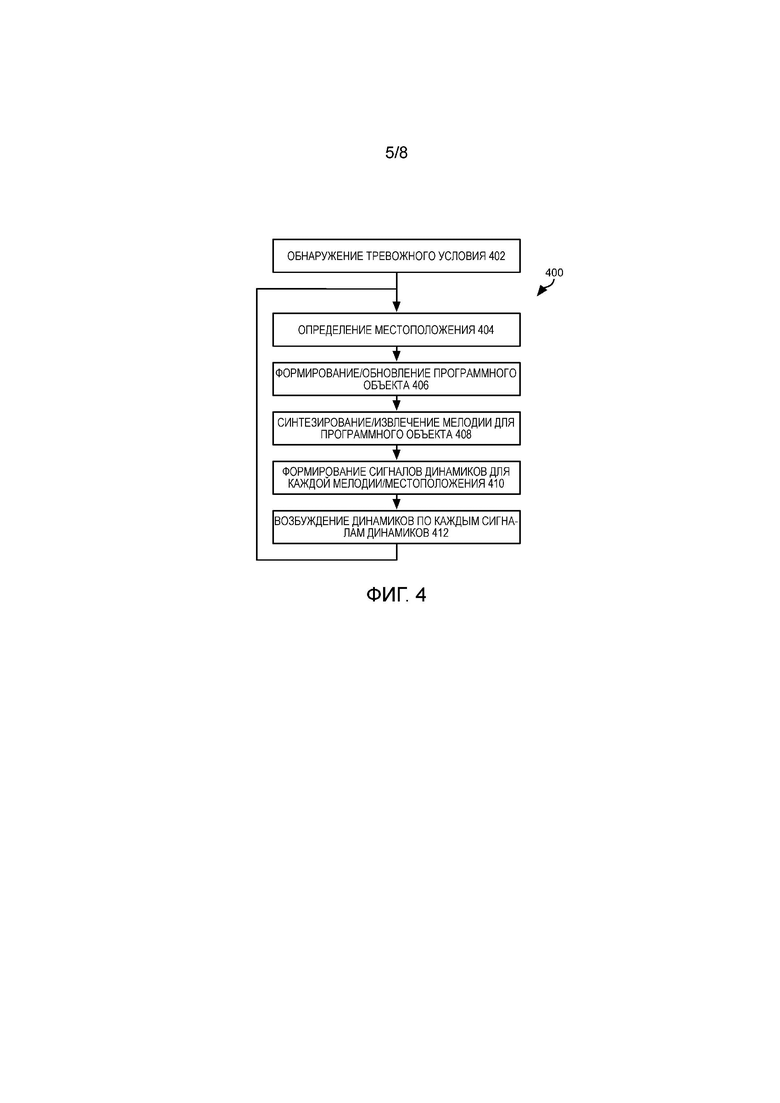
[0010] Фиг. 4 - это блок-схема последовательности операций процесса способа для формирования пространственного слышимого тревожного оповещения в соответствии с вариантом осуществления настоящего изобретения; и
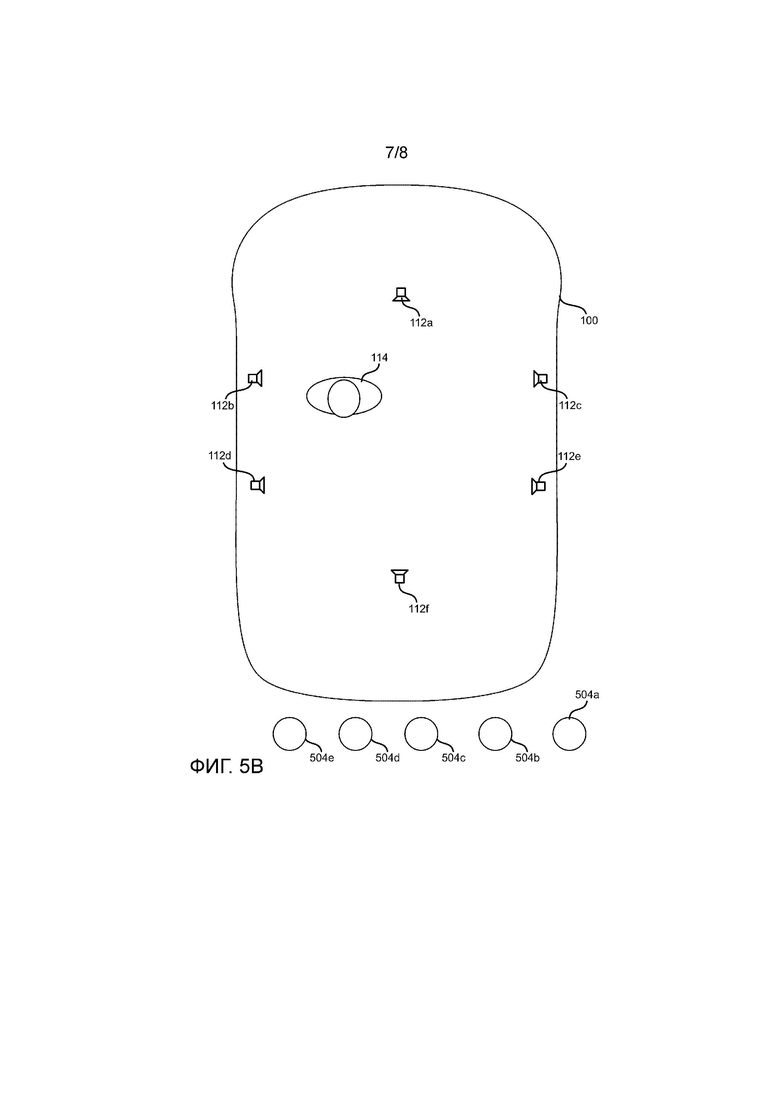
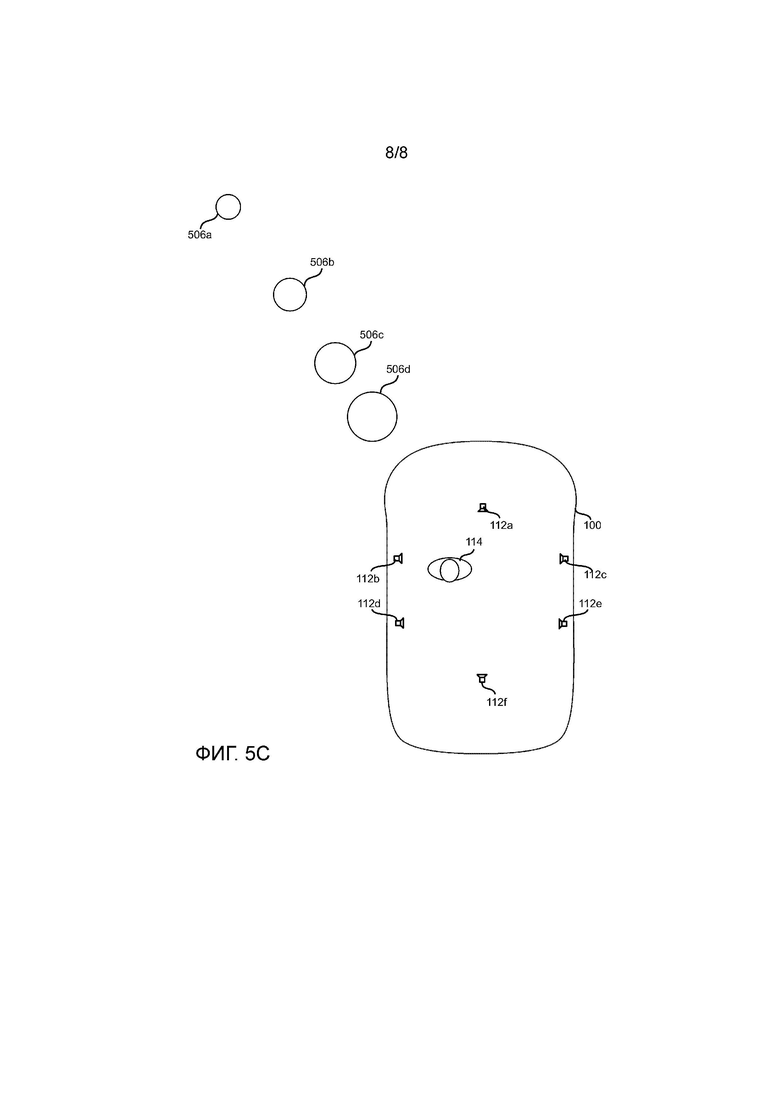
[0011] Фиг. 5A-5C - это схемы, иллюстрирующие формирование пространственных слышимых тревожных оповещений для различных сигналов в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание изобретения
[0012] Ссылаясь на фиг. 1A и 1B, транспортное средство 100 может включать в себя любое транспортное средство, известное в области техники. Транспортное средство 100 может иметь все структуры и отличительные признаки любого транспортного средства, известного в области техники, включающие в себя колеса, трансмиссию, соединенную с колесами, двигатель, соединенный с трансмиссией, систему рулевого управления, тормозную систему и другие системы, известные в области техники, которые должны быть включены в транспортное средство.
[0013] Как обсуждается более подробно в данном документе, контроллер 102 может принимать один или более выходных сигналов от одного или более внешних датчиков 104. Например, одна или более камер 106a могут быть установлены на транспортное средство 100 и выводить потоки принимаемых изображений в контроллер 102.
[0014] Внешние датчики 104 могут включать в себя такие датчики как ультразвуковой датчик 106b, радиолокационный (определение направления и дальности с помощью радиосигнала) датчик 106c, лидарный (лазерная система обнаружения и измерения дальности) датчик 106d, сонарный (определение местоположения и дальности с помощью звуковых волн) датчик 106e и т.п.
[0015] Как показано на фиг. 1B, внешние датчики 104 могут быть распределены по транспортному средству 100, так что практически 360 градусов (например, в пределах 10 градусов) окружающей обстановки транспортного средства 100 находится в поле обзора, по меньшей мере, одного из внешних датчиков 104. Тип и размещение различных типов датчиков 106a-106e, как показано на фиг. 1B является исключительно примерным. Любое другое размещение датчиков 106a-106c, достаточное, чтобы предоставлять возможность восприятия окружающей обстановки транспортного средства 100, может быть использовано.
[0016] Контроллер 102 может выполнять модуль 108 тревожного оповещения, который принимает выходные сигналы внешних датчиков 104. Модуль 108 тревожного оповещения может включать в себя модуль 110a идентификации препятствия, модуль 110b прогнозирования столкновения и модуль 110c принятия решения. Модуль 110a идентификации препятствия анализирует выходные сигналы внешних датчиков и идентифицирует потенциальные препятствия, включающие в себя людей, животных, транспортные средства, здания, бордюры и другие объекты и структуры. В частности, модуль 110a идентификации препятствия может идентифицировать изображения транспортных средств в сигналах транспортного средства, получаемых от датчиков.
[0017] Модуль 110b прогнозирования столкновения прогнозирует, какие изображения препятствий вероятно должны сталкиваться с транспортным средством 100, на основе его текущей траектории или текущего заданного пути. Модуль 110b прогнозирования столкновения может оценивать вероятность столкновения с объектами, идентифицированными посредством модуля 110a идентификации препятствия. Модуль 110c принятия решения может принимать решение о том, формировать ли предупредительный сигнал, на основе обнаруженного препятствия или других критериев, таких как уход с полосы движения транспортного средства 100 или другое небезопасное условие.
[0018] В некоторых вариантах осуществления модуль 110c принятия решения может быть частью автономного транспортного средства, в таком случае модуль 110c принятия решения может автоматически определять, останавливаться ли, ускоряться, поворачивать и т.д. для того, чтобы избегать препятствий. Способ, которым модуль 110b прогнозирования столкновения прогнозирует потенциальные столкновения, и способ, которым модуль 110c принятия решения предпринимает действие, чтобы избегать потенциальных столкновений, может соответствовать любому способу или системе, известной в области техники автономных транспортных средств.
[0019] Модуль 108 тревожного оповещения может включать в себя модуль 110e пространственного слышимого тревожного оповещения. Модуль 110e пространственного слышимого тревожного оповещения инструктирует внутренним динамикам 112a-112f формировать тревожные сигналы, моделирующие звук, исходящий из местоположения, соответствующего основанию для тревожного оповещения, такого как местоположение препятствия, обнаруженное с помощью внешних датчиков 104. Динамики 112a-112f распределены вокруг водителя 114, так что посредством регулировки синхронизации и фазы сигналов, воспроизводимых посредством динамиков 112a-112f, водитель 114 воспринимает звук, исходящий из конкретного смоделированного местоположения.
[0020] Способ, которым эти пространственные слышимые тревожные оповещения формируются на основе выходных сигналов внешних датчиков 104, описывается ниже относительно фиг. 3-5B. В некоторых вариантах осуществления пространственные слышимые тревожные оповещения могут также быть сформированы посредством модуля 110e тревожного оповещения в ответ на состояние одной или более систем 116 транспортного средства, такое как выходные сигналы внутренних датчиков 118a, таких как датчики двери, которые иллюстрируются ниже на фиг. 5C.
[0021] В современном транспортном средстве почти каждое взаимодействие между пассажирами и транспортным средством передается по сети транспортного средства в качестве сигнала. Любой и все из этих сигналов могут быть использованы в качестве основы для пространственного слышимого сигнала согласно способам, описанным в данном документе. В частности, каждый сигнал может быть использован, чтобы создавать звуковой объект (см. элемент 304, фиг. 3). Это может включать в себя любой вид нажатия кнопки или взаимодействия с транспортным средством, такое как поднятие и опускание окна, или HVAC-устройства управления, выбираемые режимы привода, положение передачи. Это может также включать в себя информацию, которую информационно-развлекательная система пытается сообщать, например, сигналы входящих вызовов, музыкальные сигналы (стереосигналы могут быть представлены двумя объектами), уведомления и т.д. Соответственно, контроллер 102 может быть соединен с сетью транспортного средства и может принимать и создавать звуковые объекты для любой информации по сети транспортного средства. Например, звуковые объекты могут быть созданы для сигналов к и/или от IVI (информационно-развлекательной системы в транспортном средстве) системы 118b, HVAC (система обогрева, вентиляции и кондиционирования воздуха) системы 118c, датчиков 118d силовой цепи (двигатель, трансмиссия, тормоза и т.д.) и одного или более устройств управления салона (окна с электроприводом, сиденье с электроприводом регулировки и т.д.). Фиг. 2 - это блок-схема, иллюстрирующая примерное вычислительное устройство 200. Вычислительное устройство 200 может быть использовано, чтобы выполнять различные процедуры, такие как обсужденные в данном документе. Контроллер 102 может иметь некоторые или все атрибуты вычислительного устройства 200.
[0022] Вычислительное устройство 200 включает в себя один или более процессоров 202, одно или более запоминающих устройств 204, один или более интерфейсов 206, одно или более устройств 208 памяти большой емкости, одно или более устройств 210 ввода/вывода (I/O) и устройство 230 отображения, все из которых соединяются с шиной 212. Процессор(ы) 202 включают в себя один или более процессоров или контроллеров, которые исполняют инструкции, сохраненные в запоминающем устройстве(ах) 204 и/или устройстве(ах) 208 памяти большой емкости. Процессор(ы) 202 могут также включать в себя различные типы компьютерно-читаемых носителей, такие как кэш-память.
[0023] Запоминающее устройство(а) 204 включают в себя различные компьютерно-читаемые носители, такие как энергозависимая память (например, оперативное запоминающее устройство (RAM) 214) и/или энергонезависимая память (например, постоянное запоминающее устройство (ROM) 216). Запоминающее устройство(а) 204 могут также включать в себя перезаписываемое ROM, такое как флэш-память.
[0024] Устройство(а) 208 памяти большой емкости включают в себя различные компьютерно-читаемые носители, такие как магнитные ленты, магнитные диски, оптические диски, твердотельную память (например, флэш-память) и т.д. Как показано на фиг. 2, конкретным устройством памяти большой емкости является накопитель 224 на жестком диске. Различные накопители могут также быть включены в устройство(а) 208 памяти большой емкости, чтобы предоставлять возможность считывания с и/или записи на различные компьютерные читаемые носители. Устройство(а) 208 памяти большой емкости включают в себя съемные носители 226 и/или несъемные носители.
[0025] I/O-устройство(а) 210 включают в себя различные устройства, которые предоставляют возможность ввода данных и/или другой информации в или извлечения из вычислительного устройства 200. Примерные I/O-устройство(а) 210 включают в себя устройства управления курсором, клавиатуры, кнопочные панели, микрофоны, мониторы или другие устройства отображения, динамики, принтеры, сетевые интерфейсные карты, модемы, линзы, CCD или другие устройства захвата изображения и т.п.
[0026] Устройство 230 отображения включает в себя любой тип устройства, способного отображать информацию одному или более пользователям вычислительного устройства 200. Примеры устройства 230 отображения включают в себя монитор, дисплейный терминал, видеопроекционное устройство и т.п.
[0027] Интерфейс(ы) 206 включают в себя различные интерфейсы, которые предоставляют возможность вычислительному устройству 200 взаимодействовать с другими системами, устройствами или вычислительными окружениями. Примерный интерфейс(ы) 206 включают в себя любое число различных сетевых интерфейсов 220, таких как интерфейсы с локальными вычислительными сетями (LAN), глобальными вычислительными сетями (WAN), беспроводными сетями и Интернетом. Другой интерфейс(ы) включают в себя пользовательский интерфейс 218 и интерфейс 222 периферийного устройства. Интерфейс(ы) 206 могут также включать в себя один или более периферийных интерфейсов, таких как интерфейсы для принтеров, указательных устройств (мыши, трекбола и т.д.), клавиатур и т.п.
[0028] Шина 212 предоставляет возможность процессору(ам) 202, запоминающему устройству(ам) 204, интерфейсу(ам) 206, устройству(ам) 208 памяти большой емкости, I/O-устройству(ам) 210 и устройству 230 отображения связываться друг с другом, а также с другими устройствами или компонентами, соединенными с шиной 212. Шина 212 представляет один или более из нескольких типов шинных структур, таких как системная шина, PCI-шина, шина IEEE 1394, USB-шина и т.д.
[0029] В целях иллюстрации программы и другие исполняемые программные компоненты показаны в данном документе как дискретные блоки, хотя понятно, что такие программы и компоненты могут постоянно находиться в различные моменты времени в различных компонентах хранения вычислительного устройства 200 и исполняются процессором(ами) 202. Альтернативно, системы и процедуры, описанные в данном документе, могут быть реализованы в аппаратных средствах или сочетании аппаратных средств, программного обеспечения и/или микропрограммного обеспечения. Например, одна или более специализированных интегральных микросхем (ASIC) могут быть запрограммированы, чтобы выполнять одну или более из систем и процедур, описанных в данном документе.
[0030] Обращаясь к фиг. 3, контроллер 102 может реализовывать иллюстрированные компоненты и поток данных. Сигналы 300 транспортного средства могут быть введены в модуль 302 разрешения конфликтов объектов тревожного оповещения. Модуль 302 разрешения конфликтов объектов тревожного оповещения оценивает сигналы 300 датчиков, чтобы определять, указывается ли тревожное условие посредством одного или более сигналов датчиков. Например, модуль 302 разрешения конфликтов объектов тревожного оповещения может выполнять функции обнаружения препятствия и прогнозирования столкновения модуля 110a идентификации препятствия, модуля 110b прогнозирования столкновения и модуля 110c принятия решения.
[0031] Когда модуль 110c принятия решения указывает, что столкновение с препятствием неизбежно, модуль 302 разрешения конфликтов объектов тревожного оповещения может создавать объект 304, представляющий препятствие. Объект 304 может быть программным объектом. Объект 304 может включать в себя такую информацию как тип 306a объекта 304, который является потенциальным столкновением с препятствием в этом примере. Тип препятствия может также быть указан посредством типа 306a (человек, животное, транспортное средство, строительный мусор, структура и т.д.).
[0032] Объект 304 может дополнительно включать в себя местоположение 306b. Например, сигнал 300 датчика может указывать местоположение как некоторое или все из угла, расстояния, простого относительного местоположения (впереди, позади, слева, справа) или двух- или трехмерной координаты относительно транспортного средства 100. Например, каждый датчик 106a-106e имеет поле обзора, охватывающее известную угловую область около транспортного средства. Соответственно, препятствие, обнаруженное посредством датчика 106a-106e, может, как предполагается, быть в этой угловой области. Некоторые из датчиков 106a-106e могут также указывать расстояние до препятствия, в частности, датчики 106b-106e или камеры 106a, реализующие бинокулярную систему технического зрения. Другие датчики предоставляют выходные сигналы в форме облака точек трехмерных координат, которые указывают местоположение препятствия, в частности, лидар-датчики 106d.
[0033] Местоположение 306b может быть тем же, что и местоположение, выводимое посредством датчиков 106a-106e, в выходном сигнале которых препятствие было обнаружено, или может быть преобразованной версией местоположения, указанного посредством сигналов транспортного средства, полученных от датчика. Например, местоположения на внешней стороне транспортного средства могут быть преобразованы в позицию внутри салона транспортного средства 100.
[0034] Объект 304 может дополнительно включать в себя динамические характеристики 306c для препятствия. Датчики 106a-106e могут обнаруживать скорость, также как местоположение. Соответственно, эта скорость может быть сохранена в динамических характеристиках 306c. Скорость, сохраненная в динамических характеристиках 306c, может быть такой же, что и скорость, обнаруженная посредством датчика 106a-106e, или преобразованной версией этой скорости. В некоторых вариантах осуществления скорость может быть логически выведена из изменений в местоположении по времени для препятствия, т.е., посредством измерения местоположения препятствия в два момента времени и разделения изменения в местоположении на задержку между двумя моментами времени.
[0035] Объект 304 может дополнительно включать в себя метаданные 306d. Метаданные 306d могут определять один или более параметров, регулирующих формирование звука для объекта 304, и могут быть определены способами, которые принимают в качестве входных данных сигналы, полученные от датчиков, и/или другие сигналы транспортного средства и выводят значения метаданных согласно предварительно определенным функциям.
[0036] Например, метаданные 306d могут включать в себя громкость звука, выбранную согласно размеру или близости препятствия, например, должен быть громче с уменьшением расстояния до местоположения 306b. Другие метаданные могут включать в себя то, должен ли источник звука для объекта 304 быть смоделирован как плоская волна, точечный источник или другой тип источника звука, определяющий пространственное воспроизведение. В некоторых вариантах осуществления местоположение 306b является фактическим местоположением препятствия или датчиком, соответствующим объекту 304. В таких вариантах осуществления метаданные 306d могут включать в себя преобразованный источник звука, полученный из преобразования фактического местоположения согласно некоторой функции.
[0037] Объект 304 может дополнительно включать в себя период 306e. В некоторых вариантах осуществления звуковые тревожные оповещения могут включать в себя множество повторяющихся тонов с периодом повторения тонов, зависящим от свойств сигнала транспортного средства, который вызвал создание объекта 304. Например, период 306e может уменьшаться с увеличением скорости препятствия или уменьшаться с уменьшением расстояния до препятствия. Вышеприведенные примеры громкости и периода являются исключительно примерными. Как описывается более подробно ниже, любой "акустический показатель" мелодии может управляться согласно метаданным 306d.
[0038] Ниже находится пример атрибутов программного объекта 304, который может быть сформирован для сигнала транспортного средства:
Object.Name=(например, отслеживаемый пешеход №3)
Object.Class=(например, среда, тревожное оповещение, безопасность, щелчок кнопки, навигация)
Object.Class.Subtype=(например, телефонный звонок, пешеход, стерео левый/правый канал, нажатие/отпускание кнопки окна)
Object.Class.Subtype.(otherdata) (Могут быть интервалом времени, когда кнопка нажата, или любыми другими данными, которые могут быть использованы для определения звука. Или могут быть замечанием о том, что пешеход не может выполнять зрительный контакт с транспортным средством, или автомобиль не может предполагать, что пешеход осознает присутствие транспортного средства).
Object.RelativePosition=<x,y,z> вектор
Object.Velocity=<x,y,z> вектор
Object.RangeRate=скалярная величина (например, скорости сближения для ADAS-вычислений)
Object.Precedence=(определяет приоритет звука, который является важным для безопасности и резкого отклонения звука)
Звуковые метаданные на основе метаданных транспортного средства, динамически создаваемых для сигналов:
Object.sound.SourceType=(например, точечный источник, плоская волна - определяет тип пространственного воспроизведения)
Object.sound.RelativeVolume=(например, -0.0дБ)
Object.sound.SourcePosition=<x,y,z> вектор (например, позиция источника в виртуальном акустическом пространстве может не быть такой же, что и в реальном пространстве, но они напрямую коррелируются посредством способа)
[0039] В некоторых случаях сигнал 300 транспортного средства может соответствовать предварительно существующему объекту 304 или тому же препятствию, что и другой сигнал 300 датчика. Соответственно, модуль 302 разрешения конфликтов объектов тревожного оповещения может гарантировать, что объект 304, соответствующий сигналу 300 датчика, обновляется соответствующим образом. Например, если сигнал 300 датчика указывает, что препятствие присутствует в текущем местоположении, модуль 302 разрешения конфликтов объектов тревожного оповещения может определять, существует ли объект 304, имеющий местоположение 306 в пределах некоторого порогового расстояния от текущего местоположения, и если так, местоположение 306b может быть обновлено в текущее местоположение. Альтернативно, текущее местоположение может быть сравнено с спроецированными местоположениями для предварительно существующих объектов 304 на основе местоположения 306b плюс произведение относительной скорости в динамических характеристиках 306c и прошедшего времени с тех пор, когда местоположение 306b было в прошлый раз обновлено. Если текущее местоположение находится в пределах некоторого порогового расстояния от спроецированного местоположения, тогда местоположение 306b и/или динамические характеристики 306c могут быть обновлены на основе сигнала 300 датчика.
[0040] В других случаях объект 304 может быть создан посредством модуля 302 разрешения конфликтов объектов тревожного оповещения для других сигналов транспортного средства. В одном примере, если дверь определяется посредством внутреннего датчика 118a салона как неплотно закрытая, может быть создан объект 304, имеющий то же местоположение 306a, что и местоположение двери, указанной как неплотно закрытая посредством внутреннего датчика 118a. Тип 306a может быть типом "неплотно закрытая дверь". Как описано ниже, перемещение моделируемого источника звука может быть смоделировано по направлению к двери, которая обнаружена как неплотно закрытая. Соответственно, местоположение 306a может быть обновлено в течение периода времени согласно этому желательному перемещению. Моделируемое перемещение может быть определено по произвольно определенным динамическим характеристикам 306c объекта 304. Аналогично, громкость 306d и период 306e могут быть заданы или постепенно модифицированы согласно программной последовательности для того, чтобы предоставлять пространственный слышимый сигнал, который ясно указывает, что дверь неплотно закрыта, и ее местоположение.
[0041] Сигнал датчика ремня безопасности может также приводить в результате к аналогичному объекту 304, который указывает местоположение ремня безопасности, который не закреплен, тем же образом, что и описанный выше. Другие сигналы 300 транспортного средства могут также приводить в результате к соответствующим объектам 304 и иметь атрибуты 306a-306e, которые задаются согласно значениям по умолчанию для того, чтобы ясно указывать, куда внимание водителя должно быть направлено, и указывать тип проблемы, указанной посредством сигнала транспортного средства.
[0042] Синтезатор мелодии/модуль 310 воспроизведения может выбирать, формировать и/или воспроизводить мелодии, соответствующие одному или более объектам 304. Модуль 310 принимает в качестве входных данных некоторые или все данные объекта 304. Например, метаданные 306d объекта 304 могут быть использованы модулем 310, чтобы выбирать или синтезировать мелодию для объекта 304. Например, некоторая мелодия может быть выбрана для объектов 304 заданного типа. В случае препятствий выбираемая мелодия может быть выбрана на основе определенного типа препятствия (пешеход, животное, транспортное средство и т.д.) или характера препятствия (препятствие в виде заднего поперечного движения, препятствие в виде встречного движения, препятствие в виде переднего поперечного движения и т.д.).
[0043] В некоторых вариантах осуществления мелодии могут воспроизводиться как последовательность мелодий, имеющих атрибуты, соответствующие метаданным 306d объекта 304. В одном примере громкость и период мелодий могут изменяться со временем, когда препятствие становится ближе или движется быстрее. Аналогично, громкость и период могут быть модифицированы согласно запрограммированной логике для некоторых сигналов транспортного средства способом, который не соответствует какому-либо фактическому перемещению препятствия, например, в случае обнаружения неплотно закрытой двери.
[0044] Синтезатор мелодии может, следовательно, формировать звуковой сигнал, который включает в себя эту последовательность мелодий. Синтезатор может просто повторять звуковой сегмент, чтобы получать последовательность мелодий, или синтезировать последовательность мелодий на основе параметров, определяющих мелодии (частотный спектр, диапазон громкости и т.д.) согласно любой технологии синтеза звука, известной на уровне техники.
[0045] В некоторых случаях мелодия может быть предварительно запрограммированным аудиофайлом, который просто извлекается модулем 310 воспроизведения вместо синтезирования.
[0046] Выходной сигнал синтезатора мелодии и модуля 310 воспроизведения может быть введен в модуль 312 воспроизведения в пространственной области. Модуль 312 воспроизведения в пространственной области моделирует распространение звука в 3D-области, которое не зависит от конфигурации динамиков транспортного средства 100. В частности, модуль воспроизведения в пространственной области может воспроизводить смоделированный звук, исходящий из местоположения 306b, с помощью независящей от динамиков технологии представления звука, такой как Ambisonics.
[0047] Модуль 312 воспроизведения в пространственной области может выполнять это для каждого объекта 304. Воспроизведение звуковых сигналов согласно модулю 312 воспроизведения в пространственной области для различных объектов 304 может затем быть объединено в микшере 314 пространственной области. Выходной сигнал микшера 314 пространственной области затем вводится в генератор 316 сигнала, который формирует сигналы, которые вводятся в динамики 112a-112f.
[0048] Функция модуля 312 воспроизведения в пространственной области, микшера 314 пространственной области и генератора 316 сигнала может включать в себя или быть заменена любой схемой трехмерного воспроизведения звука, известной на уровне техники. В частности, может быть использована любая технология, известная на уровне техники для моделирования источника звука из конкретного местоположения посредством управления сигналов, подаваемых к массиву динамиков. В частности, любая из следующих технологий или их эквивалентов может быть использована:
-MPEG-H 3D Audio (непосредственное воспроизведение в аудиоканалах, в качестве звуковых объектов, или Ambisonics (HOA) более высокого порядка) (MPEG=Группа экспертов по кинематографии).
-MPEG Surround
-Dolby Surround 7.1
-Непосредственное пространственное представление и воспроизведение в N-канальных PCM (кодово-импульсная модуляция) файлах с помощью синтеза волнового поля, DBAP (панорамирование расстояния на основе амплитуды) или Ambisonics эквивалентного панорамирования.
[0049] Как известно на уровне техники, эти технологии создают звуковые сигналы, которые вынуждают слушателя предполагать желаемое местоположение и расстояние до источника звука на основе воспринимаемой интерауральной разности уровней (ILD), интерауральной разницы времени (ITD), интерауральной когерентности (IC).
[0050] Обращаясь к фиг. 4, контроллер 102 может выполнять иллюстрированный способ 400. Способ 400 может включать в себя обнаружение 402 тревожного условия. Оно может включать в себя обнаружение препятствия, пешехода, велосипеда, транспортного средства, заднего поперечного движения, ухода с полосы движения, занятости слепой зоны, неплотно закрытой двери, светофора или любого другого условия, которое может требовать уведомления водителя. Обнаружение тревожного условия может включать в себя обнаружение ошибочного состояния на основе сигналов 300 датчиков, как описано выше в данном документе.
[0051] Способ 400 может включать в себя определение 404 местоположения ошибочного состояния. Когда ошибочное состояние, по существу, имеет местоположение, ассоциированное с ним, как в случае внешнего признака, такого как препятствие, разметка полос движения, светофор, пешеход, транспортное средство, заднее поперечное движение, отклонение с полосы движения и занятость слепой зоны, местоположение, определенное на этапе 404, может быть таким же, что и это местоположение, или преобразованием этого местоположения. В случае отклонения от полосы движения, местоположение может быть смоделированным местоположением в сторону водителя 114, соответствующую направлению отклонения от полосы движения.
[0052] В случае, когда перемещение источника звука моделируется, например, в случае моделируемого перемещения источника звука по направлению к двери, которая неплотно закрыта, определение 404 местоположения может включать в себя определение следующего местоположения согласно параметрам, определяющим моделируемое перемещение.
[0053] Способ 400 может дополнительно включать в себя формирование 406 программного объекта 304, представляющего тревожное условие для первого выполнения этапа 406 или обновления 406 программного объекта для последующих выполнений для того же тревожного условия. Как отмечено выше, когда препятствие обнаруживается, этап 406 может выполняться повторяющимся образом, так что местоположение 306b программного объекта, представляющего препятствие, обновляется, чтобы отслеживать перемещение препятствия относительно транспортного средства 100, когда такое перемещение указывается в выходном сигнале одного или более датчиков 106a-106e. Как отмечено выше, это может включать в себя обнаружение препятствия в выходном сигнале одного или более датчиков 106a-106e и идентификацию программного объекта 304, имеющего местоположение 306b или прогнозируемое местоположение в пределах порогового расстояния от текущего местоположения препятствия. Этот программный объект 304 может затем быть обновлен 406, чтобы включать в себя текущее местоположение 306b препятствия. Динамические характеристики 306c могут также быть обновлены 306 согласно изменению в местоположении препятствия и/или быть непосредственно обнаруженной скоростью препятствия.
[0054] Способ 400 может дополнительно включать в себя синтезирование или извлечение 408 из базы данных мелодии для каждого программного объекта 304. Синтезирование может включать в себя формирование сегмента звука, имеющего частотный состав, огибающую амплитуды или другие атрибуты. Эти атрибуты могут соответствовать атрибутам программного объекта. Как отмечено выше, синтезирование мелодии может включать в себя синтезирование последовательности сегментов, где громкость каждого сегмента и/или периода сегментов соответствует обратной величине расстояния до препятствия, относительно скорости препятствия, или другого свойства препятствия.
[0055] Когда перемещение источника звука моделируется, громкость и период между сегментами могут быть выбраны согласно этому моделируемому перемещению, например, громкость может увеличиваться, а период может уменьшаться с уменьшением расстояния между моделируемым местоположением источника звука и водителем.
[0056] Вышеприведенные примеры атрибутов мелодии являются исключительно примерными. Любые "акустические показатели" мелодии могут управляться для того, чтобы делать мелодию индивидуальной и сообщать информацию водителю. Акустический показатель типично определяется как субъективный опыт восприятия конкретной физической характеристики слухового раздражителя. Так, например, первичной физической характеристикой тона является его фундаментальная частота (обычно измеряемая в циклах в секунду или Гц). Перцепционный показатель, который соответствует, главным образом, физическому показателю частоты, является "высотой звука", или явной "высотностью" или "низкостью" тона. Аналогично физическая интенсивность звука (или его амплитуда) является первичным определяющим фактором "громкости" акустического показателя. Соответственно, мелодия, синтезированная на этапе 408, может включать в себя монофонический сигнал, имеющий любое сочетание акустических показателей, таких как высота звука, громкость, тембр, пространственное местоположение (3d-позиция звука относительно слушателя), спектральное группирование, ритм и скорость повторения. Как отмечено выше, акустические показатели могут быть выбраны в качестве функции метаданных 306d программного объекта 304.
[0057] Способ 400 может дополнительно включать в себя формирование 410 сигналов динамика согласно мелодии, синтезированной на этапе 408, и местоположению с этапа 404. Как отмечено выше, это местоположение 404 может изменяться со временем, чтобы моделировать перемещение источника мелодии. В некоторых вариантах осуществления программные объекты 304, включающие в себя мелодию и местоположение (статичное или переменное по времени), могут быть введены в любую технологию, известную на уровне техники, для моделирования формирования звука из местоположения с помощью массива динамиков. Соответственно, этап 410 может включать в себя обработку программных объектов согласно любой из схем трехмерного акустического воспроизведения, перечисленных выше.
[0058] Динамики 112a-112f могут затем возбуждаться согласно сигналам, сформированным на этапе 412. Этапы 404-412 могут повторяться на всем протяжении времени жизни программного объекта, т.е., до тех пор, пока тревожное условие этапа 402 больше не будет обнаруживаться, например, препятствие больше не находится на пути столкновения с транспортным средством 100, заднее поперечное движение больше не обнаруживается, отклонение от полосы движения больше не происходит, слепая зона больше не занята, или дверь больше не является неплотно закрытой.
[0059] Фиг. 5A-5C иллюстрируют примерные сценарии, в которых способ 400 может выполняться. Обращаясь, в частности, к фиг. 5A, датчик двери в позиции 500 создает выходной сигнал, указывающий, что дверь, обнаруживаемая посредством датчика двери, не закрыта правильно. В ответ, контроллер формирует последовательность мелодий, имеющих смоделированные местоположения, указанные кругами 502a-502d. В частности, местоположение каждого круга 502a-502d представляет смоделированный источник звука, происходящего из динамиков 112a-112f. Как очевидно, со временем смоделированные местоположения 502a-502d переходят от точки 502a до точки 502d, тем самым, моделируя перемещение по направлению к двери, которая неплотно закрыта. Размер кругов 502a-502d указывает громкость мелодий, воспроизводимых в этом местоположении. Соответственно, громкость мелодий может увеличиваться с перемещением от водителя 114.
[0060] Отметим, что в варианте осуществления на фиг. 5A мелодии показаны перемещающимися относительно водителя 114. Соответственно, в некоторых вариантах осуществления, местоположение водителя может быть обнаружено. Например, внутренний лидар-датчик может формировать облако точек объектов внутри салона транспортного средства 100, и голова водителя может быть идентифицирована из этого облака точек.
[0061] Обращаясь к фиг. 5B, в другом сценарии, один из датчиков 106a-106e обнаруживает заднее поперечное движение. В ответ, контроллер 102 инструктирует формирование мелодий посредством динамиков 112a-112f со смоделированными местоположениями, указанными кругами 504a-504e. Как указано, местоположения мелодий могут перемещаться от 504a к 504e со временем, тем самым, предоставляя водителю впечатление движения, проходящего позади транспортного средства 100. Отметим, что поперечное движение, которое порождает мелодии 504a-504e, может не быть фактически позади транспортного средства 100 вообще, тогда как местоположения мелодий 504a-504e существуют для того, чтобы ясно сообщать водителю о потенциальной опасности, прежде чем она возникает. Однако, в других вариантах осуществления, местоположения мелодий 504a-504e соответствуют, по меньшей мере, направлению поперечного движения, которое обнаруживается.
[0062] Что касается других вариантов осуществления, мелодии 504a-504e могут увеличиваться по громкости с уменьшением расстояния до поперечного движения. Мелодии могут дополнительно включать в себя сегменты, повторяющиеся с периодом, который уменьшается с уменьшением расстояния до поперечного движения.
[0063] Обращаясь к фиг. 5C, в другом сценарии, круги 506a-506d указывают моделируемое местоположение мелодий согласно препятствию, которое вероятно должно, или имеет потенциал, столкнуться с транспортным средством 100. Смоделированные местоположения 506a-506d могут быть такими же, что и местоположение препятствия, или могут быть преобразованной версией. Например, чтобы обеспечивать раннее предупреждение, смоделированные местоположения 506a-506d могут быть ближе фактических местоположений препятствия. Как указано посредством размера кругов 506a-506d, громкость мелодий может увеличиваться с уменьшением расстояния от транспортного средства 100 до препятствия. Аналогично, каждая мелодия может быть последовательностью звуковых сегментов, имеющих период сегментов, уменьшающийся с уменьшением расстояния.
[0064] Примеры на фиг. 5A-5C являются просто примерами. Любой сигнал транспортного средства может быть представлен с помощью программного объекта, имеющего местоположение и/или перемещение, моделируемое с помощью динамиков 112a-112f согласно способу, раскрытому выше. Например, неисчерпывающий список может включать в себя:
1) Адаптивную систему автоматического поддержания скорости (круиз-контроль), например, программные объекты, указывающие необходимость замедлять или увеличивать скорость для того, чтобы избегать столкновения.
2) Автоматическое экстренное торможение, например, программные объекты, указывающие, что торможение задействуется или было задействовано.
3) Автоматическая или полуавтоматическая парковка, например, программные объекты, указывающие направление, чтобы поворачивать рулевое колесо, или направление, в котором транспортное средство должно ехать, чтобы выполнять маневр парковки.
4) Обнаружение слепой зоны, например, программные объекты, указывающие местоположение препятствия в слепой зоне или сторону, на которой занятая слепая зона располагается.
5) Предотвращение столкновений, например, программные объекты, указывающие местоположение и/или направление перемещения препятствия.
6) Отклонение от полосы движения или поддержание полосы движения, например, программные объекты, указывающие направление отклонения от полосы движения или направление, в котором транспортное средство должно двигаться, чтобы возвращаться на правильную полосу движения.
7) GPS-навигация, например, программные объекты, указывающие инструкцию поворота, или что водитель должен продолжать движение прямо.
8) Мониторинг давления в шинах, например, программные объекты, указывающие местоположение шины, которая имеет низкое давление.
9) Ограничения обнаружения и предупреждения о сцеплении шины с грунтом, например, программные объекты, указывающие, что акселератор должен быть отпущен, тормоза должны быть применены, или что поворот должен быть менее крутым.
[0065] В вышеприведенном описании ссылка была сделана на сопровождающие чертежи, которые формируют его часть, и на которых показаны в качестве иллюстрации конкретные реализации, в которых изобретение может быть применено на практике. Следует понимать, что могут использоваться другие реализации, и могут вноситься структурные изменения без отступления от объема настоящего раскрытия сущности. Ссылки в спецификации на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т.д. указывают, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления может необязательно включать в себя конкретный признак, структуру или характеристику. Кроме того, такие фразы необязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, структура или характеристика описывается в соединении с вариантом осуществления, представляется, что он находится в рамках знания специалистов в родственной области(ях) техники, чтобы реализовывать такой признак, структуру или характеристику в соединении с другими вариантами осуществления, явно или неявно описанными.
[0066] Реализации систем, устройств и способов, раскрытых в данном документе, могут содержать или использовать специализированный компьютер или компьютер общего назначения, включающий в себя аппаратные средства компьютера, такие как, например, один или более процессоров и системная память, которые обсуждаются в данном документе. Реализации в области применения настоящего изобретения могут также включать в себя физические или другие компьютерно-читаемые носители для передачи или хранения компьютерно-исполняемых инструкций и/или структур данных. Такими компьютерно-читаемыми носителями могу быть любые доступные носители, к которым можно осуществлять доступ посредством компьютерной системы общего назначения или специализированной компьютерной системы. Компьютерно-читаемые носители, которые хранят компьютерно-исполняемые инструкции, являются компьютерными носителями (устройствами) хранения. Компьютерно-читаемые носители, которые переносят компьютерно-исполняемые инструкции, являются средой передачи. Таким образом, в качестве примера, но не ограничения, реализации изобретения могут содержать, по меньшей мере, два определенно разных вида компьютерно-читаемых носителей: компьютерные носители (устройства) хранения и среду передачи.
[0067] Компьютерные носители (устройства) хранения включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители ("SSD") (например, на основе RAM), флэш-память, память с фазовым переходом ("PCM"), другие типы памяти, другой накопитель на оптическом диске, накопитель на магнитном диске или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться, чтобы хранить желаемое средство кодирования программы в форме компьютерно-исполняемых инструкций или структур данных, и к которому может обращаться компьютер общего назначения или специализированный компьютер.
[0068] Реализация устройств, систем и способов, раскрытых в данном документе, может передаваться через компьютерную сеть. "Сеть" определена как одна или более линий передачи данных, которые предоставляют возможность передачи электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация передается или предоставляется по сети или другому коммуникационному соединению (либо проводному, беспроводному, либо комбинации проводного или беспроводного) в компьютер, компьютер надлежащим образом рассматривает соединение как среду передачи. Среда передачи может включать в себя сеть и/или линии передачи данных, которые могут использоваться, чтобы переносить желаемое средство кодирования программы в форме компьютерно-исполняемых инструкций или структур данных, и к которым может обращаться компьютер общего назначения или специализированный компьютер. Комбинации вышеперечисленного также следует включить в число компьютерно-читаемых носителей.
[0069] Компьютерно-исполняемые инструкции содержат, например, инструкции и данные, которые, когда выполняются в процессоре, инструктируют компьютеру общего назначения, специализированному компьютеру или специализированному устройству обработки выполнять определенную функцию или группу функций. Компьютерно-исполняемые инструкции могут быть, например, двоичным кодом, инструкциями промежуточного формата, такими как на языке ассемблера, или даже исходным кодом. Хотя предмет изобретения описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что предмет изобретения, заданный в прилагаемой формуле изобретения, не обязательно ограничен характерными признаками или действиями, описанными выше. Скорее, описанные признаки и действия раскрыты как примерные формы реализации формулы изобретения.
[0070] Специалисты в данной области техники поймут, что изобретение может быть применено на практике в сетевых вычислительных окружениях со многими типами конфигураций компьютерной системы, включающими в себя бортовой компьютер транспортного средства, персональные компьютеры, настольные компьютеры, портативные компьютеры, процессоры для обработки сообщений, карманные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронную аппаратуру, сетевые ПК, миникомпьютеры, мейнфреймы, мобильные телефоны, PDA, планшеты, пейджеры, маршрутизаторы, коммутаторы, различные запоминающие устройства и т.п. Изобретение также может быть применено на практике в распределенных системных окружениях, где локальная и удаленная компьютерные системы, которые связаны (либо проводными линиями передачи данных, беспроводными линиями передачи данных, либо комбинацией проводных и беспроводных линий передачи данных) через сеть, обе выполняют задачи. В распределенном системном окружении программные модули могут размещаться как на локальных, так и на вытесненных запоминающих устройствах.
[0071] Дополнительно, когда это целесообразно, функции, описанные в данном документе, могут быть выполнены в одном или более из следующего: аппаратные средства, программное обеспечение, программно-аппаратные средства, цифровые компоненты или аналоговые компоненты. Например, одна или более специализированных интегральных микросхем (ASIC) могут быть запрограммированы, чтобы выполнять одну или более из систем и процедур, описанных в данном документе. Конкретные термины используются во всем описании и в формуле изобретения для того, чтобы ссылаться на конкретные системные компоненты. Специалисты в данной области техники должны принимать во внимание, что компоненты могут упоминаться под различными названиями. Этот документ не предназначен для того, чтобы проводить различие между компонентами, которые отличаются по названию, но не по функции.
[0072] Должно быть отмечено, что варианты осуществления датчиков, обсужденные выше, могут содержать компьютерные аппаратные средства, программное обеспечение, программно-аппаратные средства или любую комбинацию их, чтобы выполнять, по меньшей мере, часть их функций. Например, датчик может включать в себя компьютерный код, сконфигурированный, чтобы исполняться в одном или более процессорах, и может включать в себя аппаратную логику/электрические схемы, управляемые посредством компьютерного кода. Эти примерные устройства предоставляются в данном документе в целях иллюстрации и не предназначены быть ограничивающими. Варианты осуществления настоящего изобретения могут быть реализованы в дополнительных типах устройств, которые будут известны специалистам в соответствующей области(ях) техники.
[0073] По меньшей мере, некоторые варианты осуществления изобретения были направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), сохраненные на любом компьютерно-используемом носителе. Такое программное обеспечение, когда исполняется в одном или более устройствах обработки данных, инструктирует устройству работать, как описано в данном документе.
[0074] В то время как разные варианты осуществления настоящего изобретения были описаны выше, должно быть понятно, что они были представлены только в качестве примера, а не в ограничении. Специалистам в данной области техники должно быть очевидным, что различные изменения по форме и деталям могут вноситься без отступления от сущности и объема изобретения. Таким образом, объем охраны настоящего раскрытия сущности не должен ограничиваться любым из вышеописанных примерных вариантов осуществления, а должен определяться только в соответствии с нижеприведенной формулой изобретения и ее эквивалентами. Вышеприведенное описание представлено для целей иллюстрации и описания. Оно не предназначено для того, чтобы быть полным или чтобы ограничивать раскрытие сущности точной раскрытой формой. Множество модификаций и разновидностей возможно в свете вышеуказанных принципов. Дополнительно, следует отметить, что любые из вышеуказанных альтернативных реализаций могут использоваться в любой комбинации, требуемой для того, чтобы формировать дополнительные гибридные реализации раскрытия сущности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СНИЖЕНИЕ НАГРУЗКИ В ВЫКЛЮЧЕННОМ СОСТОЯНИИ ТРАНСПОРТНОГО СРЕДСТВА С ПОМОЩЬЮ ВНЕШНЕГО ДАТЧИКА | 2016 |
|
RU2704772C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ДЛЯ ПОЛУАВТОНОМНЫХ РЕЖИМОВ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2697177C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ, РАСПОЛОЖЕННЫХ РЯДОМ С ТРАНСПОРТНЫМ СРЕДСТВОМ | 2018 |
|
RU2709334C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2016 |
|
RU2702378C2 |
| СПОСОБ УКАЗАНИЯ НА ОПАСНОСТИ, СИСТЕМА УКАЗАНИЯ НА ОПАСНОСТИ И СООТВЕТСТВУЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2732679C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ ОБЪЕКТЕ В ТРАНСПОРТНОМ СРЕДСТВЕ (ВАРИАНТЫ) | 2016 |
|
RU2706888C2 |
| УСТАНОВКА ДЛЯ ИЗЛУЧЕНИЯ ЗВУКОВ ОПОВЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2530178C2 |
| ИНФОРМАЦИОННО-ОХРАННЫЙ КОМПЛЕКС ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228862C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2329164C1 |
| ОХРАННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2229398C1 |

Изобретение относится к предоставлению тревожных оповещений водителю транспортного средства. Транспортное средство включает в себя множество датчиков, включающих в себя внешние датчики. Сигналы транспортного средства, получаемые от датчиков, обрабатываются для обнаружения тревожных условий. Каждое тревожное условие представляется посредством созданного программного объекта. Местоположение ассоциируется с каждым программным объектом согласно местоположению внешнего признака, который порождает тревожное условие. Программный объект обновляется со временем согласно сигналам транспортного средства посредством обновления местоположения, согласно перемещению препятствия. Программные объекты обрабатываются для активации множества динамиков, действующих для моделирования звука, происходящего из местоположения, ассоциированного с программным объектом. Техническим результатом является повышение комфорта управлением транспортным средством. 2 н. и 16 з.п. ф-лы, 8 ил.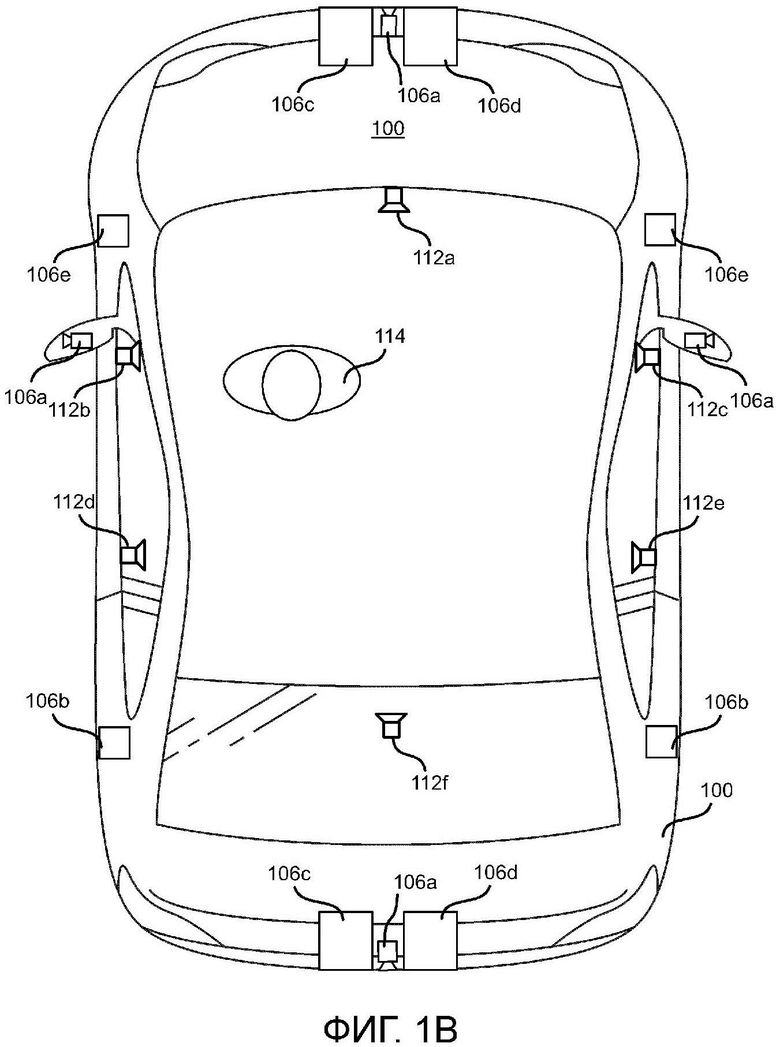
1. Способ оповещения водителя транспортного средства, содержащий этапы, на которых, посредством контроллера транспортного средства:
принимают данные датчиков от множества датчиков транспортного средства;
формируют программные объекты, соответствующие данным датчиков;
модифицируют программные объекты в реальном времени на основе обновленных данных от датчиков транспортного средства; и
формируют трехмерные (3D) акустические сигналы с помощью множества динамиков согласно программным объектам, чтобы передавать информацию транспортного средства водителю;
при этом формирование программных объектов, соответствующих данным датчиков, содержит этапы, на которых:
обнаруживают в данных датчиков присутствие поперечного движения позади транспортного средства в данных датчиков; и
создают программный объект признака для упомянутого поперечного движения;
при этом формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам, чтобы передавать информацию транспортного средства водителю, содержит этап, на котором формируют последовательность слышимых сигналов, моделирующих перемещение источника звука позади водителя транспортного средства в направлении упомянутого поперечного движения.
2. Способ по п. 1, в котором формирование программных объектов, соответствующих данным датчиков, содержит этапы, на которых:
обнаруживают в данных датчиков присутствие внешнего признака и местоположение признака для упомянутого внешнего признака; и
создают программный объект признака для упомянутого внешнего признака и получают местоположение признака, ассоциированное с ним.
3. Способ по п. 2, в котором модификация программных объектов в реальном времени на основе обновленных данных от датчиков транспортного средства содержит этапы, на которых:
обнаруживают перемещение упомянутого внешнего признака относительно данного транспортного средства в обновленных данных в обновленное местоположение; и
модифицируют местоположение признака согласно обновленному местоположению в программном объекте признака.
4. Способ по п. 3, в котором формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам содержит этап, на котором:
формируют аудиосигнал признака, имеющий смоделированное местоположение в выходных сигналах множества динамиков, соответствующее местоположению признака программного объекта признака.
5. Способ по п. 4, в котором датчики транспортного средства содержат по меньшей мере один из: ультразвукового датчика, датчика радиообнаружения и определения дальности (радар), датчика светового обнаружения и определения дальности (лидар), камеры и датчика звуковой навигации и определения дальности (сонар).
6. Способ по п. 4, в котором формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам содержит этап, на котором:
формируют последовательность слышимых звуков, имеющих разделение между слышимыми звуками, которое уменьшается с уменьшением расстояния между местоположением признака и транспортным средством.
7. Способ по п. 4, в котором формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам содержит этап, на котором:
формируют последовательность слышимых звуков, имеющих один или более акустических показателей, эффективных для передачи по меньшей мере одного из: местоположения внешнего признака относительно транспортного средства, типа внешнего признака, относительного уровня угрозы внешнего признака, расстояния между транспортным средством и внешним признаком и скорости изменения расстояния.
8. Способ по п. 1, в котором прием данных датчиков от множества датчиков транспортного средства содержит этап, на котором принимают выходной сигнал датчика двери, указывающий, что дверь неплотно закрыта, причем способ дополнительно содержит этапы, на которых:
формируют программный объект неплотно закрытой двери, имеющий местоположение, ассоциированное с ним, и изменяют местоположение, ассоциированное с программным объектом неплотно закрытой двери, в течение некоторого периода времени, чтобы указывать перемещение по направлению к двери; и
формируют трехмерные (3D) акустические сигналы с помощью множества динамиков в течение упомянутого периода времени согласно текущему значению местоположения.
9. Способ по п. 1, в котором прием данных датчиков от множества датчиков транспортного средства содержит этап, на котором принимают сигналы, используемые контроллером для реализации одного или более из следующего:
адаптивная система автоматического поддержания скорости;
автоматическое экстренное торможение;
автоматическая парковка;
помощь в парковке;
обнаружение слепой зоны;
предотвращение столкновения;
предупреждение об отклонении от полосы движения;
помощь в поддержании полосы движения;
навигация с помощью системы глобального позиционирования (GPS);
мониторинг давления в шинах; и
система управления силой сцепления с дорогой.
10. Транспортное средство, содержащее:
множество датчиков, функционирующих, чтобы определять рабочие параметры транспортного средства;
множество динамиков, расположенных внутри салона транспортного средства;
контроллер, функционально соединенный с множеством датчиков и множеством динамиков, причем контроллер запрограммирован, чтобы:
принимать данные датчиков от множества датчиков;
формировать программные объекты, соответствующие данным датчиков;
модифицировать программные объекты в реальном времени на основе обновленных данных от множества датчиков; и
формировать трехмерные (3D) акустические сигналы с помощью множества динамиков согласно программным объектам, чтобы передавать информацию транспортного средства водителю;
при этом контроллер дополнительно запрограммирован, чтобы формировать программные объекты, соответствующие данным датчиков, посредством:
обнаружения в данных датчиков присутствия поперечного движения позади транспортного средства в данных датчиков; и
создания программного объекта признака для упомянутого поперечного движения;
при этом формирование 3D-акустических сигналов с помощью множества динамиков согласно программным объектам, чтобы передавать информацию транспортного средства водителю, содержит формирование последовательности слышимых сигналов, моделирующих перемещение источника звука позади водителя транспортного средства в направлении упомянутого поперечного движения.
11. Транспортное средство по п. 10, в котором контроллер дополнительно запрограммирован, чтобы формировать программные объекты, соответствующие данным датчиков, посредством:
обнаружения в данных датчиков присутствия внешнего признака и местоположения признака для упомянутого внешнего признака; и
создания программного объекта признака для упомянутого внешнего признака и получения местоположения признака, ассоциированного с ним.
12. Транспортное средство по п. 11, в котором контроллер дополнительно запрограммирован, чтобы модифицировать программные объекты в реальном времени на основе обновленных данных от множества датчиков посредством:
обнаружения перемещения упомянутого внешнего признака относительно данного транспортного средства в обновленных данных в обновленное местоположение; и
модификации местоположения признака согласно обновленному местоположению в программном объекте признака.
13. Транспортное средство по п. 12, в котором контроллер дополнительно запрограммирован, чтобы формировать 3D-акустические сигналы с помощью множества динамиков согласно программным объектам посредством:
формирования аудиосигнала признака, имеющего смоделированное местоположение в выходных сигналах множества динамиков, соответствующее местоположению признака программного объекта признака.
14. Транспортное средство по п. 13, в котором множество датчиков содержит по меньшей мере один из: ультразвукового датчика, датчика радиообнаружения и измерения дальности (радар), датчика светового обнаружения и определения дальности (лидар), камеры и датчика звуковой навигации и определения дальности (сонар).
15. Транспортное средство по п. 13, в котором контроллер дополнительно запрограммирован, чтобы формировать 3D-акустические сигналы с помощью множества динамиков согласно программным объектам посредством:
формирования последовательности слышимых звуков, имеющих разделение между слышимыми звуками, которое уменьшается с уменьшением расстояния между местоположением признака и транспортным средством.
16. Транспортное средство по п. 13, в котором контроллер дополнительно запрограммирован, чтобы формировать 3D-акустические сигналы с помощью множества динамиков согласно программным объектам посредством:
формирования последовательности слышимых звуков, причем интенсивность слышимых звуков увеличивается с уменьшением расстояния между местоположением признака и транспортным средством.
17. Транспортное средство по п. 10, в котором контроллер дополнительно запрограммирован, чтобы:
принимая данные датчиков от множества датчиков, принимать выходной сигнал датчика двери, указывающий, что дверь неплотно закрыта;
формировать программный объект неплотно закрытой двери, имеющий местоположение, ассоциированное с ним, и изменять местоположение, ассоциированное с программным объектом неплотно закрытой двери, в течение некоторого периода времени, чтобы указывать перемещение по направлению к двери; и
формировать трехмерные (3D) акустические сигналы с помощью множества динамиков в течение упомянутого периода времени согласно текущему значению местоположения.
18. Транспортное средство по п. 10, в котором контроллер дополнительно запрограммирован, чтобы, принимая данные датчиков от множества датчиков транспортного средства, принимать сигналы, используемые контроллером для реализации одного или более из следующего:
адаптивная система автоматического поддержания скорости;
автоматическое экстренное торможение;
автоматическая парковка;
помощь в парковке;
обнаружение слепой зоны;
предотвращение столкновения;
предупреждение об отклонении от полосы движения;
помощь в поддержании полосы движения;
навигация с помощью системы глобального позиционирования (GPS);
мониторинг давления в шинах; и
система управления силой сцепления с дорогой.
| US 8422693 B1, 16.04.2013 | |||
| US 5450057 A, 12.09.1995 | |||
| УСТРОЙСТВО ЗАЩИТЫ АВТОМОБИЛЯ ПРИ СТОЛКНОВЕНИИ (ВАРИАНТЫ) | 2014 |
|
RU2600174C2 |

