Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к транспортным системам и, более конкретно, к системам и способам, которые обнаруживают препятствия, расположенные рядом с транспортным средством.
Уровень техники
[0002] Автомобили и другие транспортные средства обеспечивают значительную долю перевозок для коммерческих, правительственных и частных организаций. Транспортные средства, такие как автономные транспортные средства, движутся по дорогам, площадкам для парковки и другим областям, которые могут содержать любое число препятствий. В некоторых ситуациях движения, например, когда транспортное средство движется задним ходом, видимость для водителя или системы автоматического вождения может быть ограничена. Эта ограниченная видимость подвергает транспортное средство риску столкновения с препятствиями на пути транспортного средства. Точное обнаружение препятствий рядом с транспортным средством дает водителю транспортного средства, или системе автоматического вождения, возможность выполнять изменения в движении и избегать столкновения с препятствием.
Сущность изобретения
Заявлен способ, содержащий этапы, на которых:
принимают данные, по меньшей мере, от одного датчика, установленного на транспортное средство;
создают, посредством системы обнаружения препятствий, карту на основе вероятностной сетки, ассоциированную с областью рядом с транспортным средством;
определяют, посредством системы обнаружения препятствий, достоверность, ассоциированную с каждой вероятностью в карте на основе вероятностной сетки; и
определяют, посредством системы обнаружения препятствий, возможность того, что препятствие существует в области рядом с транспортным средством, на основе карты на основе вероятностной сетки.
Причем заявленный способ дополнительно содержит этап, на котором, в ответ на определение возможности того, что препятствие существует в области рядом с транспортным средством, формируют оповещение водителю транспортного средства.
Причем заявленный способ дополнительно содержит этап, на котором, в ответ на определение возможности того, что препятствие существует в области рядом с транспортным средством, передают оповещение системе автоматического вождения транспортного средства.
Причем заявленный способ дополнительно содержит этап, на котором вычисляют вероятности, ассоциированные с соседними ячейками в карте на основе вероятностной сетки, основанной на принятых данных, при этом соседние ячейки включают в себя восемь ячеек, непосредственно окружающих конкретную ячейку в карте на основе вероятностной сетки.
Причем заявленный способ дополнительно содержит этап, на котором обновляют вероятностные значения соседних ячеек с помощью байесовского метода.
Заявлен способ, содержащий этапы, на которых:
принимают данные, по меньшей мере, от одного датчика, установленного на транспортное средство;
создают, посредством системы обнаружения препятствий, карту на основе вероятностной сетки, ассоциированную с областью рядом с транспортным средством, при этом карта на основе вероятностной сетки задает двухмерную матрицу ячеек, так что каждая ячейка задает вероятность, ассоциированную с конкретным фрагментом области рядом с транспортным средством;
определяют, посредством системы обнаружения препятствий, достоверность, ассоциированную с каждой ячейкой в карте на основе вероятностной сетки;
определяют, посредством системы обнаружения препятствий, возможность того, что препятствие существует в области рядом с транспортным средством, на основе карты на основе вероятностной сетки; и
формируют, в ответ на определение возможности того, что препятствие существует в области рядом с транспортным средством, оповещение и передают оповещение водителю или системе автоматического вождения.
Причем в заявленных способах, по меньшей мере, один датчик включает в себя, по меньшей мере, один из лидарного датчика, радиолокационного датчика и камеры.
Причем заявленные способы дополнительно содержат этап, на котором выполняют временной анализ принятых данных с помощью факторов узнавания и забывания, ассоциированных с картой на основе вероятностной сетки.
Причем в заявленных способах фактор узнавания увеличивает значение вероятности, ассоциированное с ячейкой в карте на основе вероятностной сетки, со временем.
Причем в заявленных способах фактор забывания уменьшает значение вероятности, ассоциированное с ячейкой в карте на основе вероятностной сетки, со временем.
Причем заявленные способы дополнительно содержат этап, на котором вычисляют вероятности, ассоциированные с соседними ячейками в карте на основе вероятностной сетки, на основе принятых данных.
Причем в заявленных способах транспортное средство является автономным транспортным средством.
Заявлено устройство, содержащее:
множество датчиков, установленных на транспортное средство и сконфигурированных, чтобы захватывать данные датчика;
множество управляющих актуаторов транспортного средства, сконфигурированных, чтобы регулировать работу транспортного средства; и
систему обнаружения препятствий, соединенную с множеством датчиков и множеством управляющих актуаторов транспортного средства, система обнаружения препятствий сконфигурирована с возможностью:
создавать карту на основе вероятностной сетки, ассоциированную с областью поблизости от транспортного средства;
определять достоверность, ассоциированную с каждой вероятностью в карте на основе вероятностной сетки; и
определять возможность того, что препятствие существует в области поблизости от транспортного средства, на основе карты на основе вероятностной сетки.
В заявленном устройстве множество датчиков включают в себя один или более из лидарного датчика, радиолокационного датчика и камеры.
При этом заявленное устройство содержится в транспортном средстве.
Краткое описание чертежей
[0003] Неограничивающие и неисчерпывающие варианты осуществления настоящего изобретения описываются со ссылкой на последующие чертежи, на которых одинаковые ссылочные номера ссылаются на одинаковые части на всех различных чертежах, пока не указано иное.
[0004] Фиг. 1 - это блок-схема, иллюстрирующая вариант осуществления системы управления транспортным средством, которая включает в себя систему обнаружения препятствий.
[0005] Фиг. 2 - это блок-схема, иллюстрирующая вариант осуществления системы обнаружения препятствий.
[0006] Фиг. 3A иллюстрирует вариант осуществления транспортного средства с зоной, представляющей интерес, позади транспортного средства.
[0007] Фиг. 3B иллюстрирует примерную зону, представляющую интерес, позади транспортного средства.
[0008] Фиг. 4 иллюстрирует вариант осуществления способа для обнаружения препятствия рядом с транспортным средством.
Подробное описание изобретения
[0009] В последующем раскрытии выполняется ссылка на сопровождающие чертежи, которые формируют его часть, и на которых показаны в качестве иллюстрации конкретные реализации, в которых изобретение может быть применено на практике. Следует понимать, что могут использоваться другие реализации, и могут вноситься структурные изменения без отступления от объема настоящего раскрытия сущности. Ссылки в спецификации на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т.д. указывают, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления может необязательно включать в себя конкретный признак, структуру или характеристику. Кроме этого, такие фразы не обязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, структура или характеристика описывается в соединении с вариантом осуществления, представляется, что он находится в рамках знания специалистов в родственной области(ях) техники, чтобы реализовывать такой признак, структуру или характеристику в соединении с другими вариантами осуществления, явно или неявно описанными.
[0010] Реализации систем, устройств и способов, раскрытых в данном документе, могут содержать или использовать специализированный компьютер или компьютер общего назначения, включающий в себя аппаратные средства компьютера, такие как, например, один или более процессоров и системная память, которые обсуждаются в данном документе. Реализации в пределах объема настоящего раскрытия сущности также могут включать в себя физические и другие машиночитаемые носители для переноса или сохранения машиноисполняемых инструкций и/или структур данных. Такими компьютерно-читаемыми носителями могу быть любые доступные носители, к которым можно осуществлять доступ посредством компьютерной системы общего назначения или специализированной компьютерной системы. Машиночитаемые носители, которые сохраняют машиноисполняемые инструкции, представляют собой компьютерные носители (устройства) хранения данных. Машиночитаемые носители, которые переносят машиноисполняемые инструкции, представляют собой среды передачи. Таким образом, в качестве примера, но не ограничения, реализации изобретения могут содержать, по меньшей мере, два определенно разных вида компьютерно-читаемых носителей: компьютерные носители (устройства) хранения данных и среды передачи.
[0011] Компьютерные носители (устройства) хранения включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители ("SSD") (например, на основе RAM), флэш-память, память с фазовым переходом ("PCM"), другие типы памяти, другой накопитель на оптическом диске, накопитель на магнитном диске или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться, чтобы хранить желаемое средство кодирования программы в форме компьютерно-исполняемых инструкций или структур данных, и к которому может обращаться компьютер общего назначения или специализированный компьютер.
[0012] Реализация устройств, систем и способов, раскрытых в данном документе, может передаваться через компьютерную сеть. "Сеть" задается как одна или более линий передачи данных, которые предоставляют возможность передачи электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация передается или предоставляется по сети или другому коммуникационному соединению (либо проводному, беспроводному, либо комбинации проводного или беспроводного) в компьютер, компьютер надлежащим образом рассматривает соединение как среду передачи. Среда передачи может включать в себя сеть и/или линии передачи данных, которые могут использоваться, чтобы переносить желаемое средство кодирования программы в форме компьютерно-исполняемых инструкций или структур данных, и к которым может обращаться компьютер общего назначения или специализированный компьютер. Комбинации вышеперечисленного также следует включать в число машиночитаемых носителей.
[0013] Компьютерно-исполняемые инструкции содержат, например, инструкции и данные, которые, когда выполняются в процессоре, инструктируют компьютеру общего назначения, специализированному компьютеру или специализированному устройству обработки выполнять определенную функцию или группу функций. Компьютерно-исполняемые инструкции могут быть, например, двоичным кодом, инструкциями промежуточного формата, такими как на языке ассемблера, или даже исходным кодом. Хотя предмет изобретения описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что предмет изобретения, заданный в прилагаемой формуле изобретения, необязательно ограничен описанными признаками или действиями, описанными в данном документе. Наоборот, описанные признаки и этапы раскрываются как примерные формы реализации формулы изобретения.
[0014] Специалисты в данной области техники поймут, что изобретение может быть применено на практике в сетевых вычислительных окружениях со многими типами конфигураций компьютерной системы, включающими в себя бортовой компьютер транспортного средства, персональные компьютеры, настольные компьютеры, портативные компьютеры, процессоры для обработки сообщений, карманные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронную аппаратуру, сетевые ПК, миникомпьютеры, мейнфреймы, мобильные телефоны, PDA, планшеты, пейджеры, маршрутизаторы, коммутаторы, различные запоминающие устройства и т.п. Изобретение также может быть применено на практике в распределенных системных окружениях, где локальная и удаленная компьютерные системы, которые связаны (либо проводными линиями передачи данных, беспроводными линиями передачи данных, либо комбинацией проводных и беспроводных линий передачи данных) через сеть, обе выполняют задачи. В распределенном системном окружении программные модули могут размещаться как на локальных, так и на удаленных запоминающих устройствах.
[0015] Дополнительно, в надлежащих случаях, функции, описанные в данном документе, могут выполняться в одном или более из следующего: аппаратные средства, программное обеспечение, программно-аппаратные средства, цифровые компоненты или аналоговые компоненты. Например, одна или более специализированных интегральных схем (ASIC) могут быть запрограммированы с возможностью осуществлять одну или более систем и процедур, описанных в данном документе. Конкретные термины используются во всем описании и в формуле изобретения для того, чтобы ссылаться на конкретные системные компоненты. Специалисты в данной области техники должны принимать во внимание, что компоненты могут упоминаться под различными названиями. Этот документ не предназначен для того, чтобы проводить различие между компонентами, которые отличаются по названию, но не по функции.
[0016] Должно быть отмечено, что варианты осуществления датчиков, обсуждаемые в данном документе, могут содержать компьютерные аппаратные средства, программное обеспечение, программно-аппаратные средства или любую комбинацию их, чтобы выполнять, по меньшей мере, часть их функций. Например, датчик может включать в себя компьютерный код, сконфигурированный, чтобы исполняться в одном или более процессорах, и может включать в себя аппаратную логику/электрические схемы, управляемые посредством компьютерного кода. Эти примерные устройства предоставляются в данном документе в целях иллюстрации и не предназначены быть ограничивающими. Варианты осуществления настоящего раскрытия сущности могут реализовываться в дополнительных типах устройств, как должно быть известно специалистам в данной области техники.
[0017] По меньшей мере, некоторые варианты осуществления изобретения направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), сохраненные на любом компьютерно-используемом носителе. Такое программное обеспечение, когда исполняется в одном или более устройствах обработки данных, инструктирует устройству работать, как описано в данном документе.
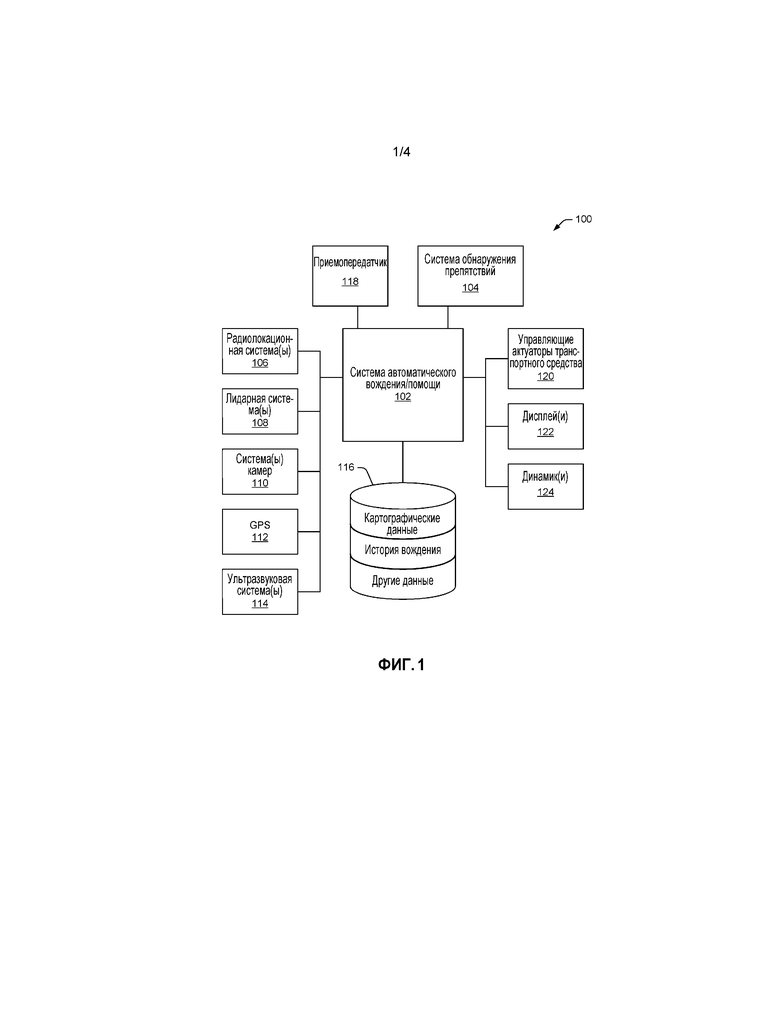
[0018] Фиг. 1 является блок-схемой, иллюстрирующей вариант осуществления системы 100 управления транспортным средством в транспортном средстве, которая включает в себя систему 104 обнаружения препятствий. Система 102 автоматического вождения/помощи может быть использована, чтобы автоматизировать или управлять работой транспортного средства или предоставлять помощь водителю-человеку. Например, система 102 автоматического вождения/помощи может управлять одним или более из торможения, руления, натяжения ремня безопасности, ускорения, световых сигналов, предупредительных сигналов, оповещений водителя, радио, замков транспортного средства или любых других вспомогательных систем транспортного средства. В другом примере система 102 автоматического вождения/помощи может не иметь возможности обеспечивать какое-либо управление вождением (например, руление, ускорение или торможение), но может предоставлять оповещения и предупреждения, чтобы помогать водителю-человеку в безопасном вождении. Система 100 управления транспортным средством включает в себя систему 104 обнаружения препятствий, которая взаимодействует с различными компонентами в системе управления транспортным средством, чтобы обнаруживать и реагировать на потенциальные (или вероятные) препятствия, находящиеся рядом с транспортным средством (например, на пути транспортного средства). В одном варианте осуществления система 104 обнаружения препятствий обнаруживает препятствие позади транспортного средства, когда транспортное средство двигается задним ходом, и регулирует одну или более операций транспортного средства, чтобы избегать соприкосновения с препятствием, таких как остановка транспортного средства или маневрирование транспортного средства около препятствия. Хотя система 104 обнаружения препятствий показана как отдельный компонент на фиг. 1, в альтернативных вариантах осуществления система 104 обнаружения препятствий может быть включена в систему 102 автоматического вождения/помощи или любой другой компонент транспортного средства.
[0019] Система 100 управления транспортным средством также включает в себя одну или более систем/устройств датчиков для обнаружения присутствия близких объектов (или препятствий) или определения местоположения рассматриваемого транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортным средством). Например, система 100 управления транспортным средством может включать в себя одну или более радиолокационных систем 106, одну или более лидарных систем 108, одну или более систем 110 камер, систему глобального позиционирования (GPS) 112 и/или ультразвуковые системы 114. Одна или более систем 110 камер может включать в себя обращенную назад камеру, установленную на транспортное средство (например, задний фрагмент транспортного средства), обращенную вперед камеру и обращенную вбок камеру. Системы 110 камер могут также включать в себя одну или более камер салона, которые захватывают изображения пассажиров и других объектов внутри транспортного средства. Система 100 управления транспортным средством может включать в себя хранилище 116 данных для хранения релевантных или полезных данных для навигации и безопасности, таких как картографические данные, история вождения или другие данные. Система 100 управления транспортным средством может также включать в себя приемопередатчик 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой или любой другой системой связи.
[0020] Система 100 управления транспортным средством может включать в себя актуаторы 120 для управления транспортным средством, чтобы управлять различными аспектами вождения транспортного средства, такие как электромоторы, переключатели или другие актуаторы, чтобы управлять торможением, ускорением, рулевым управлением, натяжением ремня безопасности, замками дверей или т.п. Система 100 управления транспортным средством может также включать в себя один или более дисплеев 122, динамиков 124 или другие устройства, так что могут быть предоставлены оповещения водителю-человеку или пассажиру. Дисплей 122 может включать в себя индикатор на ветровом стекле, дисплей или индикатор приборной панели, экран отображения или любой другой визуальный индикатор, который может быть виден водителю или пассажиру транспортного средства. Динамики 124 могут включать в себя один или более динамиков звуковой системы транспортного средства или могут включать в себя динамик, специально предназначенный для оповещения водителя или пассажира.
[0021] Следует принимать во внимание, что вариант осуществления по фиг. 1 приводится только в качестве примера. Другие варианты осуществления могут включать в себя меньшее или дополнительное число компонентов без отступления от объема раскрытия сущности. Дополнительно, проиллюстрированные компоненты могут комбинироваться или включаться в другие компоненты без ограничения.
[0022] В одном варианте осуществления система 102 автоматического вождения/помощи конфигурируется, чтобы управлять вождением или навигацией рассматриваемого транспортного средства. Например, система 102 автоматического вождения/помощи может управлять исполнительными механизмами 120 управления транспортным средством, чтобы ехать по маршруту по дороге, площадке для парковки, проезжей части или другому местоположению. Например, система 102 автоматического вождения/помощи может определять маршрут на основе информации или данных восприятия, предоставляемых какими-либо из компонентов 106-118. Маршрут может также быть определен на основе маршрута, который осуществляет маневры транспортного средства, чтобы избегать или смягчать потенциальное столкновение с другим транспортным средством или объектом. Системы/устройства 106-110 и 114 датчиков могут быть использованы, чтобы получать данные датчиков в реальном времени, так что система 102 автоматического вождения/помощи может помогать водителю или управлять транспортным средством в реальном времени.
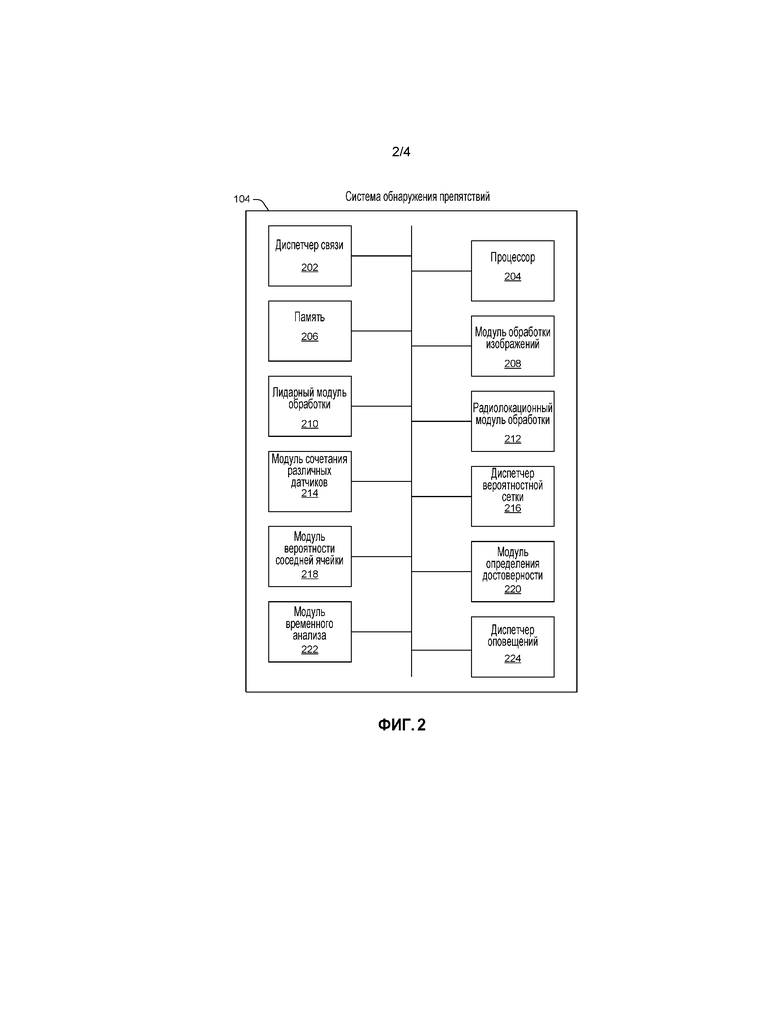
[0023] Фиг. 2 - это блок-схема, иллюстрирующая вариант осуществления системы 104 обнаружения препятствий. Как показано на фиг. 2, система 104 обнаружения препятствий включает в себя диспетчер 202 связи, процессор 204 и память 206. Диспетчер 202 связи предоставляет возможность системе 104 обнаружения препятствий связываться с другими системами, такими как система 102 автоматического вождения/помощи. Процессор 204 выполняет различные инструкции, чтобы реализовывать функциональность, предоставляемую системой 104 обнаружения препятствий, как обсуждается в данном документе. Память 206 хранит эти инструкции, также как и другие данные, используемые процессором 204 и другими модулями и компонентами, содержащимися в системе 104 обнаружения препятствий.
[0024] Дополнительно, система 104 обнаружения препятствий включает в себя модуль 208 обработки изображений, который принимает данные изображения от одной или более систем 110 камер и идентифицирует, например, препятствия рядом с рассматриваемым транспортным средством (т.е., транспортным средством, содержащим систему 104 обнаружения препятствий). В некоторых вариантах осуществления модуль 208 обработки изображений включает в себя алгоритм обнаружения препятствий, который идентифицирует потенциальное препятствие, находящееся рядом с рассматриваемым транспортным средством. Например, алгоритм обнаружения препятствий может идентифицировать расстояние между рассматриваемым транспортным средством и препятствием, также как траекторию препятствия, если оно движется. На основе расстояния и траектории препятствия алгоритм обнаружения препятствий может определять возможность столкновения между рассматриваемым транспортным средством и препятствием.
[0025] Лидарный модуль 210 обработки принимает лидарные данные от одной или более лидарных систем 108 и идентифицирует, например, потенциальное столкновение с препятствием рядом с рассматриваемым транспортным средством. В некоторых вариантах осуществления алгоритм обнаружения препятствий обнаруживает препятствия рядом с транспортным средством на основе лидарных данных. Дополнительно, радиолокационный модуль 212 обработки принимает радиолокационные данные от одной или более радиолокационных систем 106, чтобы идентифицировать, например, потенциальное столкновение с препятствием. В некоторых вариантах осуществления алгоритм обнаружения препятствий использует радиолокационные данные, чтобы обнаруживать одно или более препятствий рядом с транспортным средством.
[0026] Система 104 обнаружения препятствий также включает в себя модуль 214 сочетания датчиков, который сочетает данные от множества датчиков, камер и источников данных, как обсуждается в данном документе. Например, модуль 214 сочетания датчиков может сочетать данные от одной или более камер 110, радиолокационных систем 106 и лидарных систем 108, чтобы обнаруживать препятствие и определять возможные действия, которые могут избегать или смягчать столкновение с препятствием. Диспетчер 216 вероятностной сетки выполняет различные операции, связанные с созданием и поддержанием карты на основе вероятностной сетки, на основе данных, принятых от любого числа датчиков транспортного средства и/или источников данных, как обсуждается в данном документе.
[0027] Дополнительно, система 104 обнаружения препятствий включает в себя модуль 218 вероятности соседней ячейки, который вычисляет вероятности, ассоциированные с соседними ячейками в карте на основе вероятностной сетки, как обсуждается в данном документе. Модуль 220 определения достоверности определяет достоверность, ассоциированную с каждой ячейкой в карте на основе вероятностной сетки, с помощью, например, систем и способов, обсуждаемых в данном документе.
[0028] Система 104 обнаружения препятствий также включает в себя модуль 222 временного анализа, который выполняет временной анализ данных, принятых от одного или более датчиков. В некоторых вариантах осуществления модуль 222 временного анализа применяет факторы узнавания и забывания, ассоциированные с картой на основе вероятностной сетки. Диспетчер 224 оповещений управляет формированием и передачей оповещений пассажиру (например, водителю) транспортного средства или системе 102 автоматического вождения/помощи. Например, оповещение может быть ассоциировано с препятствием на пути транспортного средства, которое представляет риск столкновения.
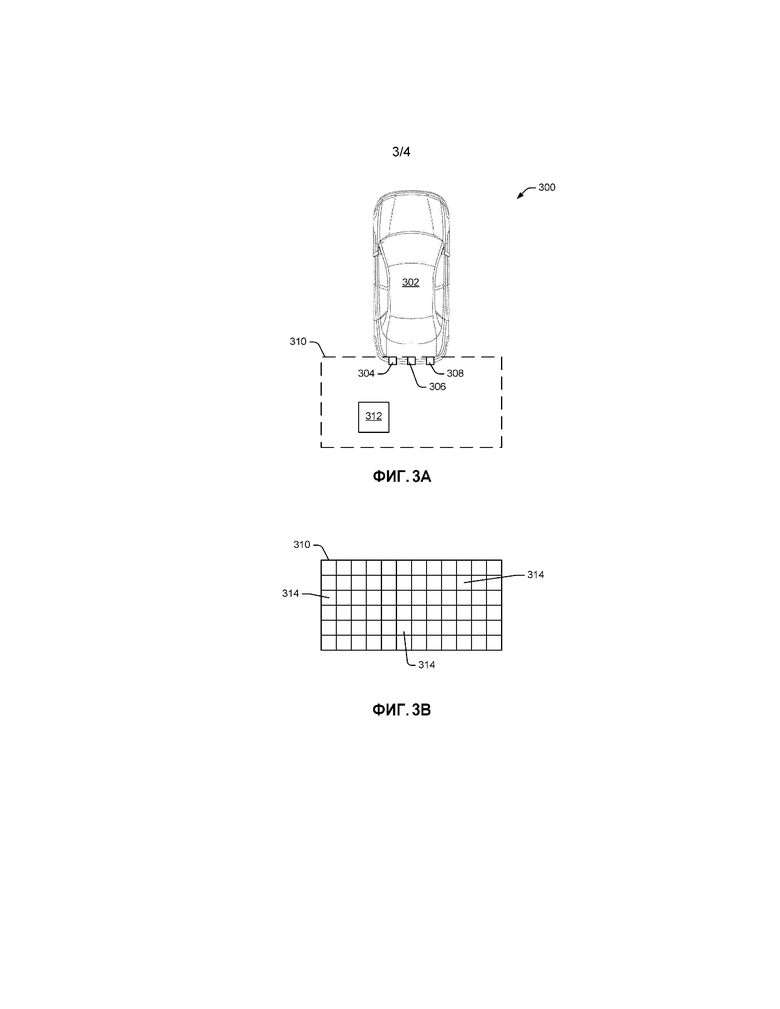
[0029] Фиг. 3A иллюстрирует вариант осуществления транспортного средства 302 с зоной 310, представляющей интерес, расположенной позади транспортного средства. Транспортное средство 302 включает в себя любое число датчиков, таких как различные типы датчиков, обсужденные в данном документе. В конкретном примере на фиг. 3A транспортное средство 302 включает в себя лидарный датчик 304, обращенную назад камеру 306 и радиолокационный датчик 308. Транспортное средство 302 может иметь любое число дополнительных датчиков (не показаны), установленных во множестве мест транспортного средства. В этом примере зона 310, представляющая интерес, располагается позади транспортного средства 302, так как транспортное средство 302 движется задним ходом или готовится двигаться задним ходом. Область позади транспортного средства 302 является важной, так как это область, в которую транспортное средство 302 движется. Таким образом, важно идентифицировать какие-либо препятствия в зоне 310, представляющей интерес, которые могут сталкиваться с транспортным средством 302.
[0030] Как показано на фиг. 3A, препятствие 312 присутствует в зоне 310, представляющей интерес. Препятствие 312 может быть человеком, животным, другим транспортным средством, структурным объектом (например, зданием или фонарным столбом), объектом и т.п. Препятствие 312 может быть неподвижным или движущимся в зоне 310, представляющей интерес. Если препятствие 312 является движущимся, система 104 обнаружения препятствий определяет скорость и траекторию движения, чтобы прогнозировать местоположение препятствия 312 в будущем времени (например, когда траектория препятствия пересекает путь движения транспортного средства). Как обсуждается в данном документе, если система 104 обнаружения препятствий обнаруживает потенциальное столкновение, оно может инструктировать водителю или системе автоматического вождения предпринимать действие, чтобы избегать столкновения. Это действие может включать в себя, например, остановку транспортного средства 302, замедление транспортного средства 302 или изменение направления поворота транспортного средства 302.
[0031] Фиг. 3B иллюстрирует сетчатую структуру примерной зоны 310, представляющей интерес, расположенной позади транспортного средства 302. Зона 310, представляющая интерес, включает в себя двухмерную сетку (или двухмерную матрицу) с множеством ячеек 314 сетки. Конкретная сетчатая структура может включать в себя любое число ячеек сетки на основе, например, вычислительных возможностей, разрешения датчика и применения данных, ассоциированных с сетчатой структурой. В конкретных реализациях, работающих с данными датчика дальности, размер сетки может изменяться между 0,1-0,5 метрами. В других реализациях любой другой размер сетки может быть использован. Системы и способы, обсуждаемые в данном документе, ассоциируют вероятность с каждой ячейкой 314 в двухмерной сетке, где каждая вероятность представляет возможность того, что препятствие находится в конкретной ячейке 314. Дополнительные детали, касающиеся вычисления и управления этими вероятностями, обсуждаются ниже.
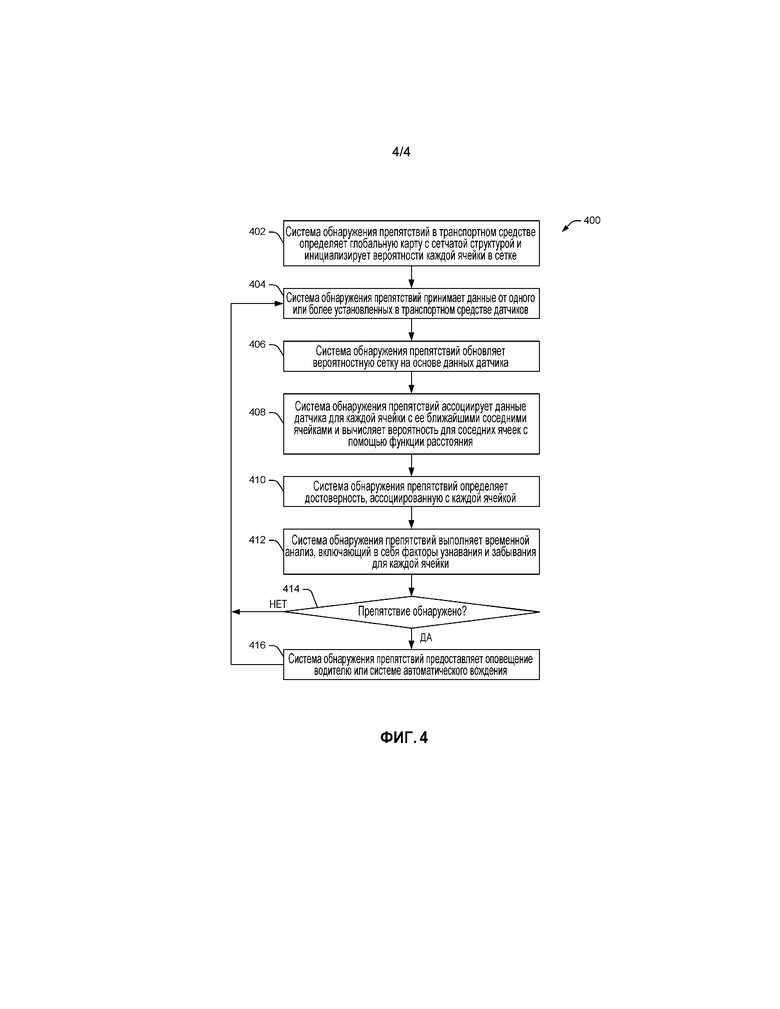
[0032] Фиг. 4 иллюстрирует вариант осуществления способа 400 для обнаружения препятствия рядом с транспортным средством. Первоначально, система обнаружения препятствий в транспортном средстве задает 402 глобальную карту, имеющую двухмерную сетчатую структуру. Каждая ячейка в сетке инициализируется посредством ассоциирования первоначальной вероятности с каждой ячейкой. Вероятность, ассоциированная с каждой ячейкой, указывает возможность того, что препятствие присутствует в этой сетке карты. В некоторых вариантах осуществления первоначальное значение вероятности, ассоциированное с каждой ячейкой, устанавливается в 0,5. Это указывает, что каждая ячейка в равной степени вероятно должна быть занята или пуста. После того как препятствие обнаруживается в каждой ячейке, эта первоначальная вероятность увеличивается. Аналогично, если объект не обнаруживается, первоначальная вероятность уменьшается. Когда используется в данном документе, глобальная карта с сетчатой структурой также называется "картой на основе вероятностной сетки". Как обсуждается относительно фиг. 3A и 3B, карта на основе вероятностной сетки ассоциируется с зоной 310, представляющей интерес.
[0033] Способ 400 продолжается, когда система обнаружения препятствий принимает 404 данные от одного или более установленных в транспортном средстве датчиков, таких как камеры, лидарные датчики, радиолокационные датчики, ультразвуковые датчики и т.п. На основе данных, принятых от установленных в транспортном средстве датчиков, система обнаружения препятствий обновляет 406 карту на основе вероятностной сетки, ассоциированную с зоной 310, представляющей интерес. Дополнительно, обновление карты на основе вероятностной сетки может учитывать данные, ассоциированные с динамическими характеристиками транспортного средства, такими как скорость транспортного средства, ориентация транспортного средства, положение транспортного средства, габариты транспортного средства, форма транспортного средства, ускорение транспортного средства, ориентация рулевого колеса и т.п. В некоторых вариантах осуществления система обнаружения препятствий использует байесовскую вероятностную теорию, чтобы определять значения вероятности в карте на основе вероятностной сетки. В некоторых реализациях данные от датчиков транспортного средства используются на различных уровнях информации, чтобы обнаруживать препятствия в зоне, представляющей интерес. Например, различные уровни информации включают в себя необработанные данные датчика, данные объектного уровня и т.п. Данные, принятые от датчиков дальности (непосредственно или опосредованно) могут быть основанными на расстоянии данными или основанными на времени до столкновения (TTC) данными.
[0034] В некоторых вариантах осуществления процедуры нанесения на карту занятости сетки обновляют карту согласно показанию датчика в местоположении, так что когда накапливается больше данных, карта становится корректной. Конкретные способы нанесения на карту занятости сетки включают в себя рекурсивный байесовский фильтр, определение местоположения методом Монте-Карло (с помощью моделей от одного датчика или множества датчиков), частично наблюдаемый марковский процесс принятия решений, фильтры частиц и т.п.
[0035] Система обнаружения препятствий затем ассоциирует 408 данные датчика для каждой ячейки с ее ближайшими соседними ячейками и вычисляет вероятность для соседних ячеек с помощью функции расстояния. В некоторых вариантах осуществления система обнаружения препятствий учитывает вероятности восьми соседних ячеек, окружающих конкретную ячейку, при вычислении вероятности конкретной ячейки. В некоторых вариантах осуществления система обнаружения препятствий обновляет вероятность окна ячеек, расположенных по соседству от конкретной ячейки. Например, процесс обновления может определять местоположение и свойства конкретной ячейки в карте на основе вероятностной сетки. Процесс обновления также определяет размер конкретной соседней области, который указывает число ближайших соседних ячеек, которые должны быть обновлены. Максимальное значение вероятности идентифицирует максимальную вероятность, которая может быть назначена ближайшим соседним ячейкам. Процесс обновления сначала идентифицирует ближайшие соседние местоположения для конкретной ячейки. Затем, функция стоимости используется, чтобы назначать весовые коэффициенты каждой из соседних ячеек. Например, функция стоимости может быть предназначена, чтобы зависеть от расстояний от ближайших соседних ячеек до конкретной ячейки. Наконец, на основе весовых коэффициентов и позиции ближайших соседних ячеек вероятности ближайших соседних ячеек обновляются с помощью байесовского подхода или аналогичного способа.
[0036] Способ 400 продолжается, когда система обнаружения препятствий определяет 410 достоверность (например, уровень достоверности), ассоциированную с каждой ячейкой в карте на основе вероятностной сетки. В некоторых вариантах осуществления достоверность каждой ячейки в карте на основе вероятностной сетки логически выводится с помощью отклонения от модели. Например, вероятность того, что ячейка занята (т.е., обнаружено препятствие), может быть вычислена с помощью модели вероятностного подхода. Из этого вероятностного подхода система может логически выводить отклонение на основе гауссовой плотности или на основе разброса данных.
[0037] Система обнаружения препятствий выполняет 412 временной анализ данных, принятых от установленных в транспортном средстве датчиков. Временной анализ включает в себя применение факторов узнавания и забывания к данным в карте на основе вероятностной сетки. Использование факторов узнавания и забывания предоставляет возможность карте на основе вероятностной сетки представлять все препятствия, которые были обнаружены посредством датчиков транспортного средства в течение периода времени, включающие в себя как статические, так и динамические препятствия. Например, фактор забывания может уменьшать вероятность ячейки со временем, а фактор узнавания может увеличивать вероятность ячейки со временем.
[0038] Система обнаружения препятствий затем определяет 414, присутствует ли препятствие в зоне, представляющей интерес, на основе данных в карте на основе вероятностной сетки. Если препятствие не обнаруживается, способ 400 продолжает принимать данные 404 от одного или более установленных в транспортном средстве датчиков.
[0039] Если препятствие обнаруживается, система обнаружения препятствий предоставляет 416 оповещение водителю или системе автоматического вождения. Оповещение может быть любым типом оповещения, включающим в себя звуковое оповещение, визуальное оповещение, тактильное оповещение и т.п. Оповещение может указывать, что препятствие существует на пути транспортного средства, и может указывать местоположение препятствия. Дополнительно, оповещение может предоставлять инструкции для избегания соприкосновения с препятствием, такие как остановка транспортного средства, замедление транспортного средства или руление транспортного средства. В некоторых реализациях оповещение предоставляется системе 102 автоматического вождения/помощи, которая управляет транспортным средством, чтобы избегать касания препятствия.
[0040] В некоторых вариантах осуществления способ 400 также обнаруживает расстояние между транспортным средством, также как скорость и траекторию препятствия, если оно движется. На основе расстояния, скорости и траектории препятствия система обнаружения препятствий определяет возможность столкновения между транспортным средством и препятствием, если транспортное средство продолжает двигаться по своему текущему маршруту. Если столкновение вероятно, оповещение или другое предупреждение формируется и предоставляется водителю или системе автоматического вождения, как обсуждалось выше.
[0041] В конкретном примере транспортное средство включает в себя ультразвуковой датчик и камеру. Данные от ультразвукового датчика и камеры объединяются, чтобы создавать и обновлять карту на основе вероятностной сетки.
[0042] Хотя конкретные примеры, обсужденные в данном документе, ассоциируются с транспортным средством, движущимся задним ходом (или движущимся обратным ходом), аналогичные системы и способы могут быть использованы, чтобы обнаруживать препятствия в зоне, представляющей интерес, расположенной где-либо еще около транспортного средства и в любой точке по периметру транспортного средства.
[0043] В то время как различные варианты осуществления настоящего изобретения описаны в данном документе, должно быть понятно, что они представлены только в качестве примера, а не ограничения. Специалистам в данной области техники должно быть очевидным, что различные изменения по форме и деталям могут вноситься без отступления от сущности и объема изобретения. Таким образом, широта и рамки настоящего изобретения не должны ограничиваться любым из вышеописанных примерных вариантов осуществления, но должны быть заданы только в соответствии с последующей формулой изобретения и ее эквивалентами. Описание в данном документе представлено в целях иллюстрации и описания. Оно не имеет намерение быть полным или ограничивать раскрытие сущности точной раскрытой формой. Многие модификации и разновидности допустимы в свете раскрытой идеи. Дополнительно, должно быть отмечено, что любая или все из альтернативных реализаций, обсуждаемых в данном документе, могут быть использованы в любой желаемой комбинации, чтобы формировать дополнительные гибридные реализации изобретения.
Изобретение относится к способу обнаружения препятствий, расположенных рядом с транспортным средством. Способ содержит этапы, на которых: принимают, посредством контроллера транспортного средства, данные, минимум, от одного датчика, установленного на транспортном средстве; создают, посредством системы обнаружения препятствий, исполняемой контроллером, карту на основе вероятностной сетки, ассоциированную с областью рядом с транспортным средством, при этом карта на основе вероятностной сетки задается как двухмерная матрица ячеек, распределенных в горизонтальной плоскости, смежной с транспортным средством; определяют, посредством системы обнаружения препятствий, достоверность, ассоциированную с каждой ячейкой матрицы ячеек в карте на основе вероятностной сетки; и определяют, посредством системы обнаружения препятствий, возможность того, что препятствие существует в области рядом с транспортным средством, на основе карты на основе вероятностной сетки; выполняют временной анализ принятых данных, используя факторы узнавания и забывания, ассоциированные с картой на основе вероятностной сетки; при этом фактор узнавания увеличивает значение вероятности, ассоциированной с каждой ячейкой матрицы ячеек, со временем; и при этом фактор забывания уменьшает значение вероятности, ассоциированной с каждой ячейкой матрицы ячеек, со временем. Достигается обнаружение препятствий рядом с транспортным средством. 7 з.п. ф-лы, 5 ил.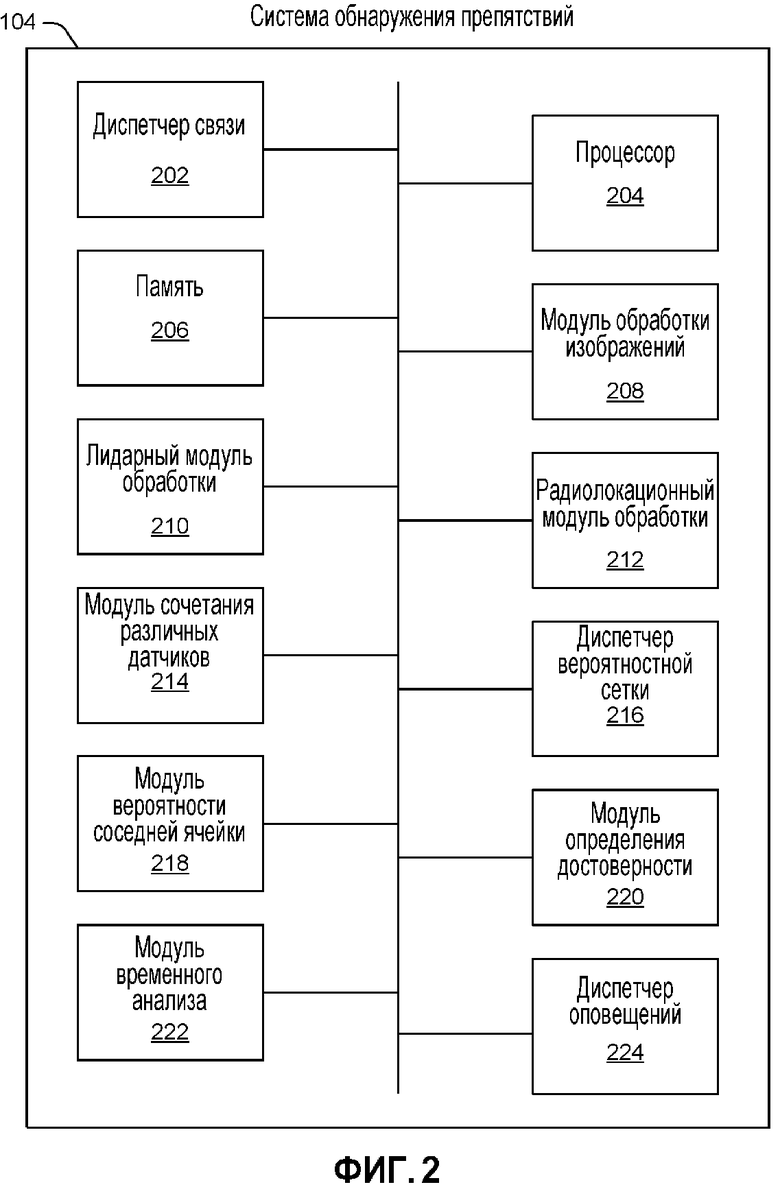
1. Способ обнаружения препятствий, расположенных рядом с транспортным средством, способ содержит этапы, на которых:
принимают, посредством контроллера транспортного средства, данные, по меньшей мере, от одного датчика, установленного на транспортном средстве;
создают, посредством системы обнаружения препятствий, исполняемой контроллером, карту на основе вероятностной сетки, ассоциированную с областью рядом с транспортным средством, при этом карта на основе вероятностной сетки задается как двухмерная матрица ячеек, распределенных в горизонтальной плоскости, смежной с транспортным средством;
определяют, посредством системы обнаружения препятствий, достоверность, ассоциированную с каждой ячейкой матрицы ячеек в карте на основе вероятностной сетки; и
определяют, посредством системы обнаружения препятствий, возможность того, что препятствие существует в области рядом с транспортным средством, на основе карты на основе вероятностной сетки;
выполняют временной анализ принятых данных, используя факторы узнавания и забывания, ассоциированные с картой на основе вероятностной сетки; при этом
фактор узнавания увеличивает значение вероятности, ассоциированной с каждой ячейкой матрицы ячеек, со временем; и при этом
фактор забывания уменьшает значение вероятности, ассоциированной с каждой ячейкой матрицы ячеек, со временем.
2. Способ по п. 1, в котором, по меньшей мере, один датчик включает в себя, по меньшей мере, один из лидарного датчика, радиолокационного датчика и камеры.
3. Способ по п. 1, дополнительно содержащий этап, на котором в ответ на определение возможности того, что препятствие существует в области рядом с транспортным средством, формируют оповещение водителю транспортного средства.
4. Способ по п. 1, дополнительно содержащий этап, на котором в ответ на определение возможности того, что препятствие существует в области рядом с транспортным средством, передают оповещение системе автоматического вождения транспортного средства.
5. Способ по п. 1, дополнительно содержащий этап, на котором вычисляют вероятности, ассоциированные с соседними ячейками в карте на основе вероятностной сетки, основанной на принятых данных.
6. Способ по п. 5, в котором соседние ячейки включают в себя восемь ячеек, непосредственно окружающих конкретную ячейку в карте на основе вероятностной сетки.
7. Способ по п. 5, дополнительно содержащий этап, на котором обновляют вероятностные значения соседних ячеек с помощью байесовского метода.
8. Способ по п. 1, в котором транспортное средство является автономным транспортным средством.
| Токарный резец | 1924 |
|
SU2016A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПАРКОВКЕ | 2009 |
|
RU2529078C2 |
| US 9250324 B2, 02.02.2016 | |||
| CN 104699102 A, 10.06.2015 | |||
| JP 3147541 B2, 19.03.2001. | |||

