Изобретение относится к гидравлическим машинам. Гидропульсатор предназначен для создания динамического нагружения испытываемых конструкций через гидравлические домкраты и может быть применен на вибрационных стендах усталостных испытаний рам тележек и их элементов тягового подвижного состава. Под гидропульсатором понимается генератор переменных объемов масла.
Известен гидропульсатор, содержащий корпус, установленный в цилиндре подпружиненный плунжер, привод которого выполненный в виде эксцентрика, установленного на приводном валу, механизм изменения хода плунжера, и электродвигатель. US 3645648 А, 29.02.1972.
Недостатком такого гидропульсатора является то, что в процессе работы отсутствует возможность регулирования величины хода плунжера.
Наиболее близким техническим решением по своей сущности и принятым в качестве прототипа является гидропульсатор, содержащий корпус, установленный в цилиндре подпружиненный плунжер, привод которого выполненный в виде эксцентрика, установленного на приводном валу, расположенном в корпусе, механизм изменения хода плунжера, маховик, и электродвигатель, соединенный через клиноременную передачу с приводным валом. SU 171627 А, 26.05.1963.
Недостатком такого гидропульсатора является то, что при работе создаются большие боковые усилия, действующие на плунжер и приводящие к перекосу последнего и образованию задиров на трущихся поверхностях плунжерной пары, вызывающих преждевременный износ плунжерной пары, а также в известном гидропульсаторе отсутствует возможность регулирования частоты и фазы пульсации.
Кроме того, общими недостатками известных гидропульсаторов является то, что в стендах для циклических испытаний деталей на прочность при сложном пространственном нагружении используются гидравлические домкраты в сочетании с гидравлическими пульсаторами плунжерного типа, причем, как правило, каждый домкрат работает от своего пульсатора. Все домкраты должны создавать нагрузку с одной частотой, но с заданным сдвигом по фазе между собой. В настоящее время это обеспечивается механической связью рабочих валов пульсаторов через силовые муфты, допускающие настройку взаимных угловых положений этих валов. Такое решение приводит к необходимости располагать гидропульсаторы в одну линию, что усложняет разводку трубопроводов, соединяющих каждый пульсатор с соответствующим домкратом.
Техническая проблема, решаемая изобретением заключается в создании возможности создавать нагрузку с одной частотой, но с заданным сдвигом по фазе между всеми гидродомкратами стенда для циклических испытаний деталей на прочность при сложном пространственном нагружении.
Технический результат заключается в возможности создавать переменные, циклически изменяющиеся нагрузки на испытуемых изделиях без использования дросселирующих распределителей и, соответственно, без выделения тепла в гидросистеме.
Поставленная проблема решается и технический результат достигается за счет того, что гидропульсатор содержит корпус, установленный в цилиндре подпружиненный плунжер, привод которого выполнен в виде эксцентрика, установленного на приводном валу, расположенном в корпусе, механизм изменения хода плунжера, маховик, и электродвигатель, соединенный через клиноременную передачу с приводным валом, при этом новым является то, что он снабжен установленными на корпусе датчиком угла поворота приводного вала и бесконтактным конечником, контролирующими соответственно угловое положение приводного вала и его нулевое положение, при этом датчик угла поворота соединен зубчатым ремнем с маховиком, установленным на приводном валу, механизм изменения хода плунжера выполнен в виде рычага один конец, которого установлен на оси, размещенной в корпусе, а другой конец рычага соединен шарниром в виде пальца и роликоподшипников с серьгой, установленной на эксцентрике на роликоподшипниках, и расположенной на корпусе ползушки, на которой установлен цилиндр, соединенный с электрическим прямоходным механизмом перемещения вдоль рычага, при этом на верхней поверхности рычага закреплена пластина, к которой поджимается плунжер через опорный ролик, причем цилиндр через гидроколлектор гидравлически соединен с гидродомкратом, и электрошкаф с пультом управления и следящим электроприводом с обратной связью от датчика угла поворота приводного вала.
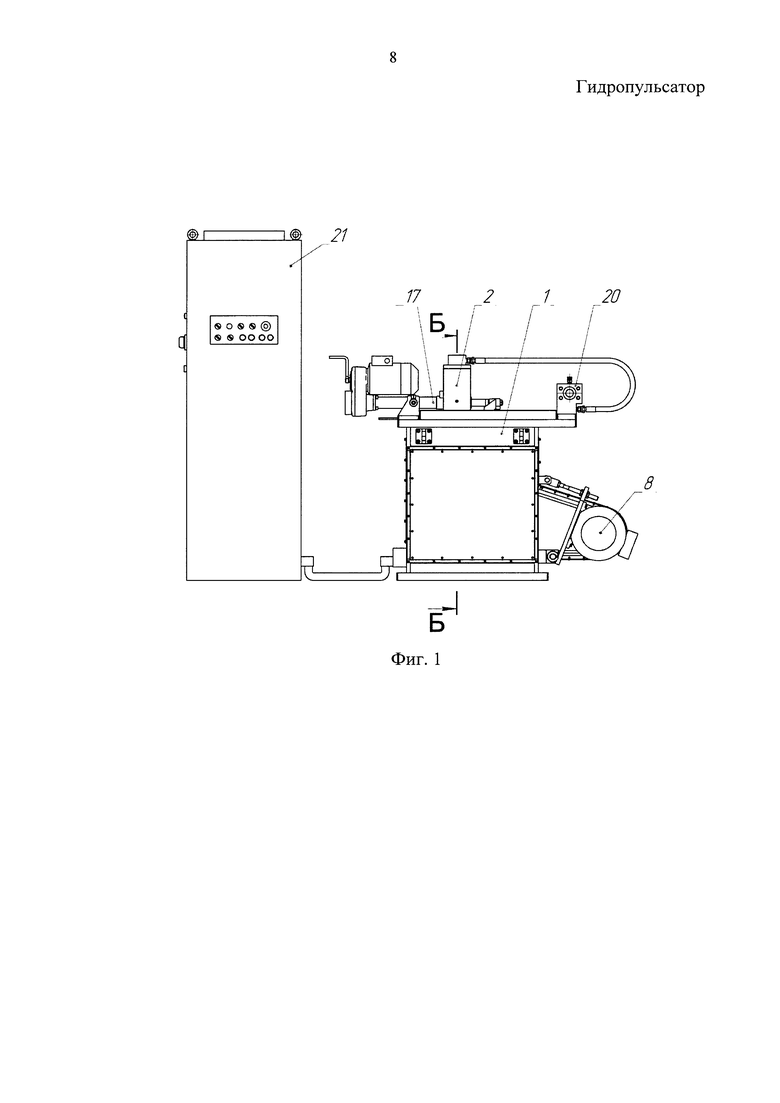
На фиг. 1 показан общий вид гидропульсатора.
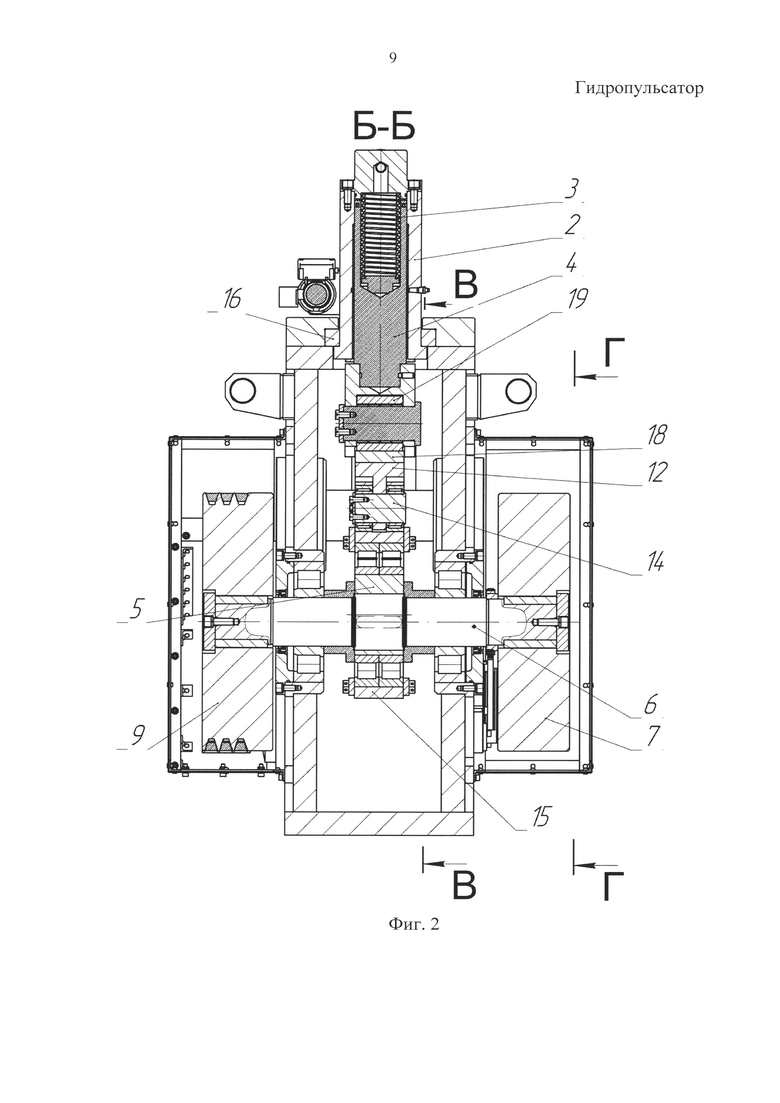
На фиг. 2 показан разрез по Б-Б на фиг. 1.
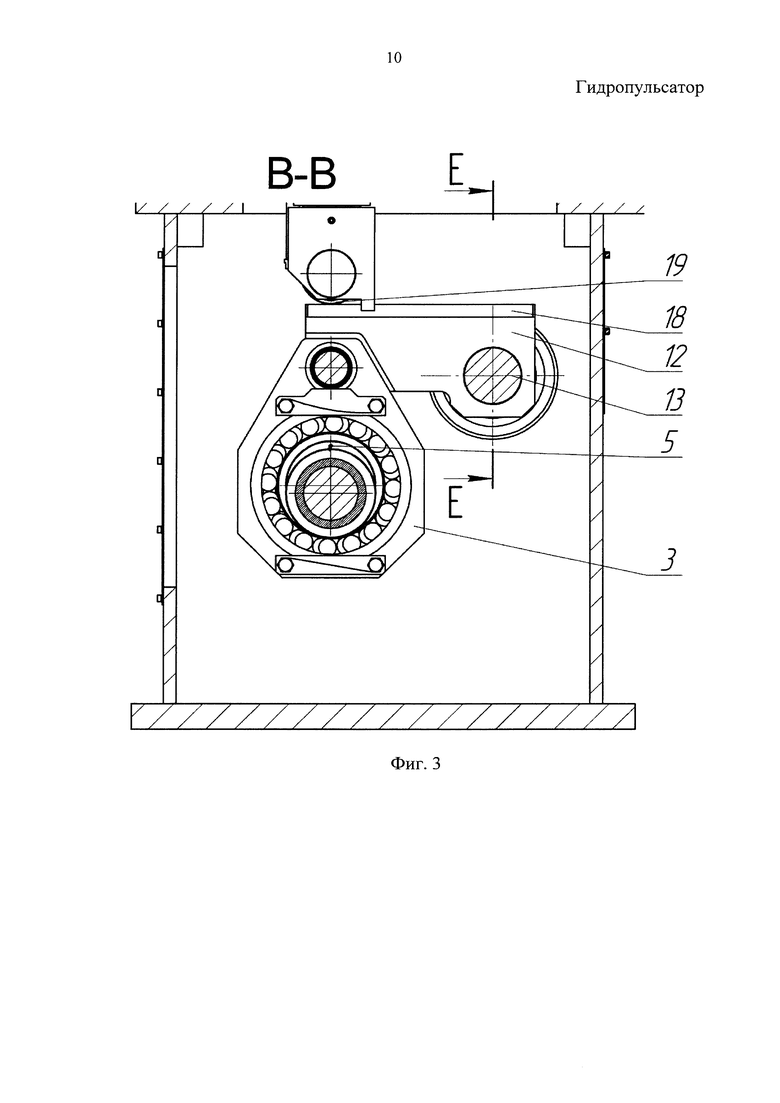
На фиг. 3 показан разрез по В-В на фиг. 2.
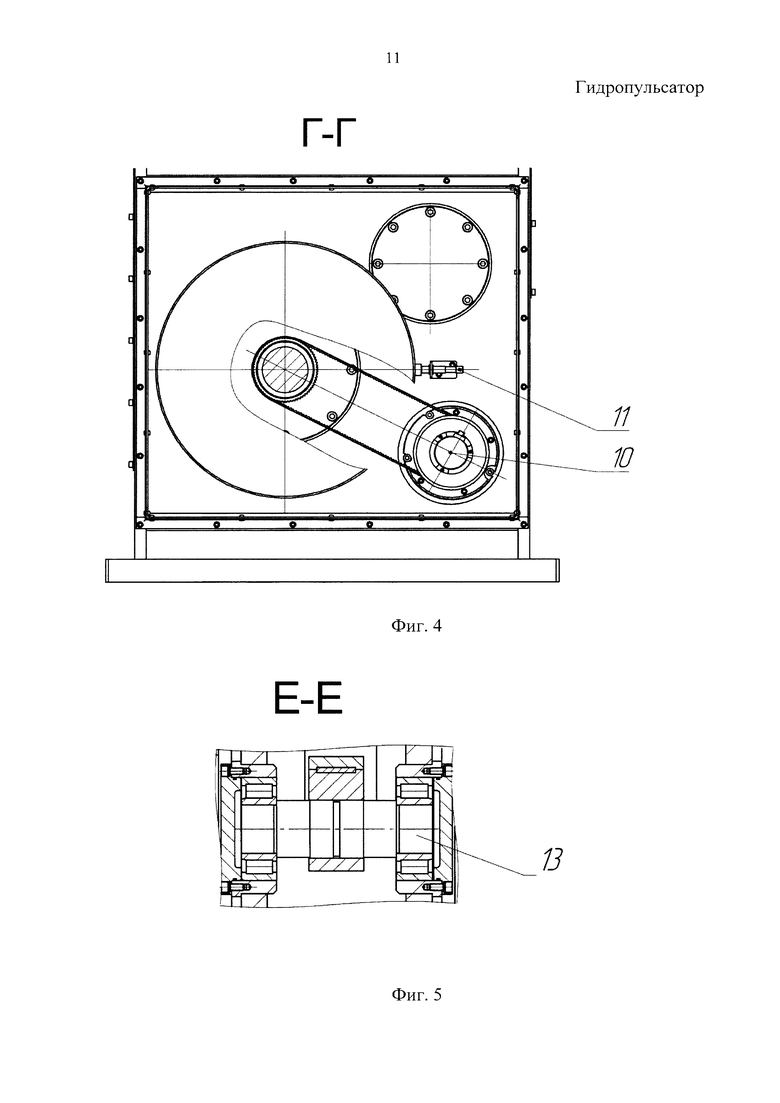
На фиг. 4 показан разрез по Г-Г на фиг. 2.
На фиг. 5 показан разрез по Е-Е на фиг. 3.
Гидропульсатор содержит корпус 1, установленный в цилиндре 2 подпружиненный пружиной 3 плунжер 4, привод которого выполнен в виде эксцентрика 5, установленного на роликоподшипниках на приводном валу 6, расположенном в роликоподшипниках в корпусе 1, механизм изменения хода плунжера 4, маховик 7, и электродвигатель 8, соединенный через клиноременную передачу 9 с приводным валом 6. Гидропульсатор снабжен установленными в корпусе 1 датчиком 10 угла поворота (энкодером) приводного вала 6 и бесконтактным конечником 11, контролирующими соответственно угловое положение приводного вала 6 и его нулевое положение (положение при котором плунжер находится в крайнем нижнем положении), при этом датчик 10 угла поворота кинематически соединен с маховиком 7, установленным на приводном валу 6, механизм изменения хода плунжера выполнен в виде рычага 12 один конец, которого установлен на оси 13, размещенной в корпусе 1 в роликоподшипниках, а другой конец рычага соединен шарниром в виде пальца 14 и роликоподшипников с серьгой 15, установленной на эксцентрике 5 на роликоподшипниках, и расположенной на корпусе 1 ползушки 16, на которой установлен цилиндр 2, соединенной с электрическим механизмом 17 перемещения вдоль рычага 12, при этом на верхней поверхности рычага 12 закреплена пластина 18, к которой поджимается плунжер 4 через опорный ролик 19, причем цилиндр 2 через гидроколлектор 20 гидравлически соединен с гидродомкратом (на чертеже не показан), и электрошкафом 21 с пультом управления.
Электрический механизм 17 перемещения выполнен в виде прямоходного механизма со встроенной винтовой передачей.
Электрошкаф 21 с пультом управления включает электроавтоматику и и следящий электропривод переменного тока.
Гидропульсатор работает следующим образом.
В предлагаемом гидропульсаторе питание асинхронного электродвигателя 8 главного привода осуществляется через электрический следящий привод с обратной связью по положению приводного вала 6 через энкодер. На маховике 7 имеется кулачек, который воздействует на бесконтактный конечник 11 - выключатель нулевого положения вала.
При использовании в испытательном стенде нескольких таких гидропульсаторов, перед запуском цикла каждый гидропульсатор устанавливается в нулевое положение, а затем в исходное положение с заданным угловым смещением. Затем на входы следящих приводов всех гидропульсаторов подается управляющие сигналы от общего задатчика, которые отрабатываются в следящем режиме всеми гидропульсаторами с сохранением заданного сдвига по фазе каждого из них.
Эксцентрик 5 преобразует вращение приводного вала 6 в качательное движение рычага 12 с постоянной угловой амплитудой. Перемещение ползушки 16 с цилиндром 2 вдоль рычага 12 производится электрическим механизмом 17, при этом амплитуда перемещения плунжера 4 может быть изменена от максимальной величины 12,5 мм (ход - 25 мм) до ноля. Угловое положение приводного вала 6 контролируется датчиком 10 угла поворота, а выход в нулевое положение - бесконтактным конечником 11.
При движении плунжера 4 изменяется объем масляной полости над плунжером 4, которая через металлорукав высокого давления соединена с гидроколлектором 20. К гидроколлектору 20 трубопроводом подключаются гидродомкраты и другие элементы гидросистемы испытательных стендов. При этом пульсатор является генератором переменных объемов масла, позволяющим создавать переменные, циклически изменяющиеся нагрузки на испытуемых изделиях без использования дросселирующих распределителей и, соответственно, без выделения тепла в гидросистеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ ПРИ ЦИКЛИЧЕСКИХ НАГРУЖЕНИЯХ | 2007 |
|
RU2337344C1 |
| ГИДРОПУЛЬСАТОР | 1967 |
|
SU223415A1 |
| ГИДРОПУЛЬСАТОР | 1971 |
|
SU291130A1 |
| МАШИНА ИСПЫТАТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ | 2006 |
|
RU2310824C1 |
| Стенд для испытания объектов на комбинированное воздействие линейных и вибрационных ускорений | 1983 |
|
SU1126827A1 |
| Система вибровозбуждения вибрационного станка | 1989 |
|
SU1646806A1 |
| Гидропривод вибрационной машины | 1975 |
|
SU608993A1 |
| ПУЛЬСАТОР ГИДРАВЛИЧЕСКИЙ ДЛЯ ВИБРОПИТАТЕЛЕЙ | 1969 |
|
SU247573A1 |
| Станок для вибрационной обработки | 1987 |
|
SU1414585A2 |
Изобретение относится к гидропульсаторам, предназначенным для создания динамического нагружения испытываемых конструкций через гидродомкраты. Гидропульсатор содержит корпус 1, установленный в цилиндре 2 подпружиненный плунжер с приводом в виде эксцентрика на приводном валу, механизм изменения хода плунжера, маховик и электродвигатель 8. Гидропульсатор снабжен установленными на корпусе 1 датчиком угла поворота приводного вала и бесконтактным конечником, контролирующими соответственно угловое положение приводного вала и его нулевое положение, электрошкафом 21 с пультом управления и следящим электроприводом с обратной связью от датчика. Датчик кинематически соединен с маховиком. Механизм изменения хода плунжера выполнен в виде рычага. На верхней поверхности рычага закреплена пластина, к которой поджимается плунжер через опорный ролик. Цилиндр 2 через гидроколлектор 20 гидравлически соединен с гидродомкратом. Изобретение направлено на обеспечении создания нагрузки с одной частотой, но с заданным сдвигом по фазе между всеми гидродомкратами стенда для циклических испытаний деталей на прочность при сложном пространственном нагружении. 5 ил.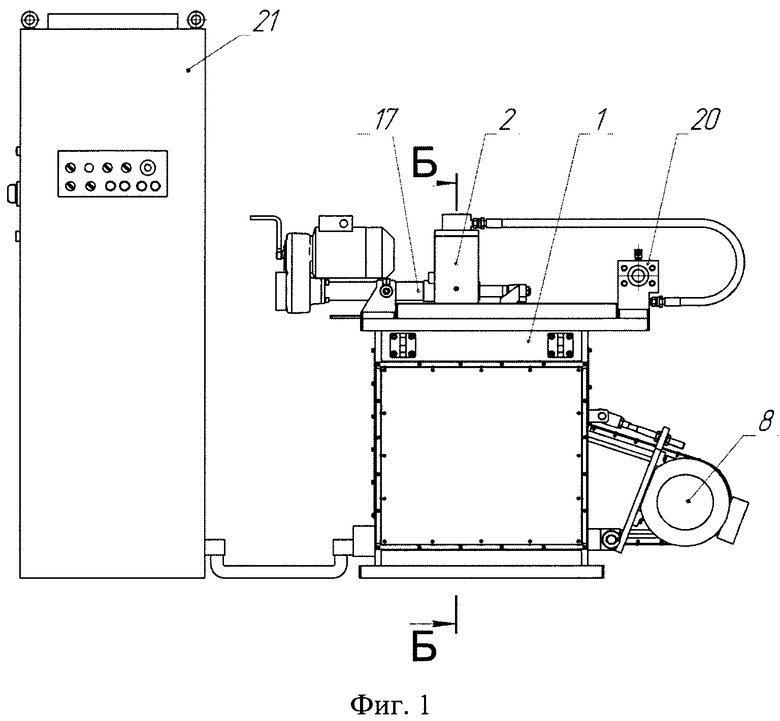
Гидропульсатор, содержащий корпус, установленный в цилиндре подпружиненный плунжер, привод которого выполнен в виде эксцентрика, установленного на приводном валу, расположенном в корпусе, механизм изменения хода плунжера, маховик, и электродвигатель, соединенный через клиноременную передачу с приводным валом, отличающийся тем, что он снабжен установленными на корпусе датчиком угла поворота приводного вала и бесконтактным конечником, контролирующими соответственно угловое положение приводного вала и его нулевое положение, при этом датчик угла поворота соединен зубчатым ремнем с маховиком, установленным на приводном валу, механизм изменения хода плунжера выполнен в виде рычага, один конец которого установлен на оси, размещенной в корпусе, а другой конец рычага соединен шарниром в виде пальца и роликоподшипников с серьгой, установленной на эксцентрике на роликоподшипниках, и расположенной на корпусе ползушки, на которой установлен цилиндр, соединенный с электрическим прямоходным механизмом перемещения вдоль рычага, при этом на верхней поверхности рычага закреплена пластина, к которой поджимается плунжер через опорный ролик, причем цилиндр через гидроколлектор гидравлически соединен с гидродомкратом, и электрошкафом с пультом управления и следящим электроприводом с обратной связью от датчика угла поворота приводного вала.
| 0 |
|
SU171627A1 | |
| Гидропульсатор | 1981 |
|
SU973963A1 |
| 0 |
|
SU185527A1 | |
| US 3645648 A, 29.02.1972 | |||
| CN 102182728 A, 14.09.2011. | |||

