Изобретение относится к машиностроению, может быть использовано на виброабразивных и виброударных отделочных и упрочняющих операциях и является усовершенствованием изобретения по авт.св. V 1052371.
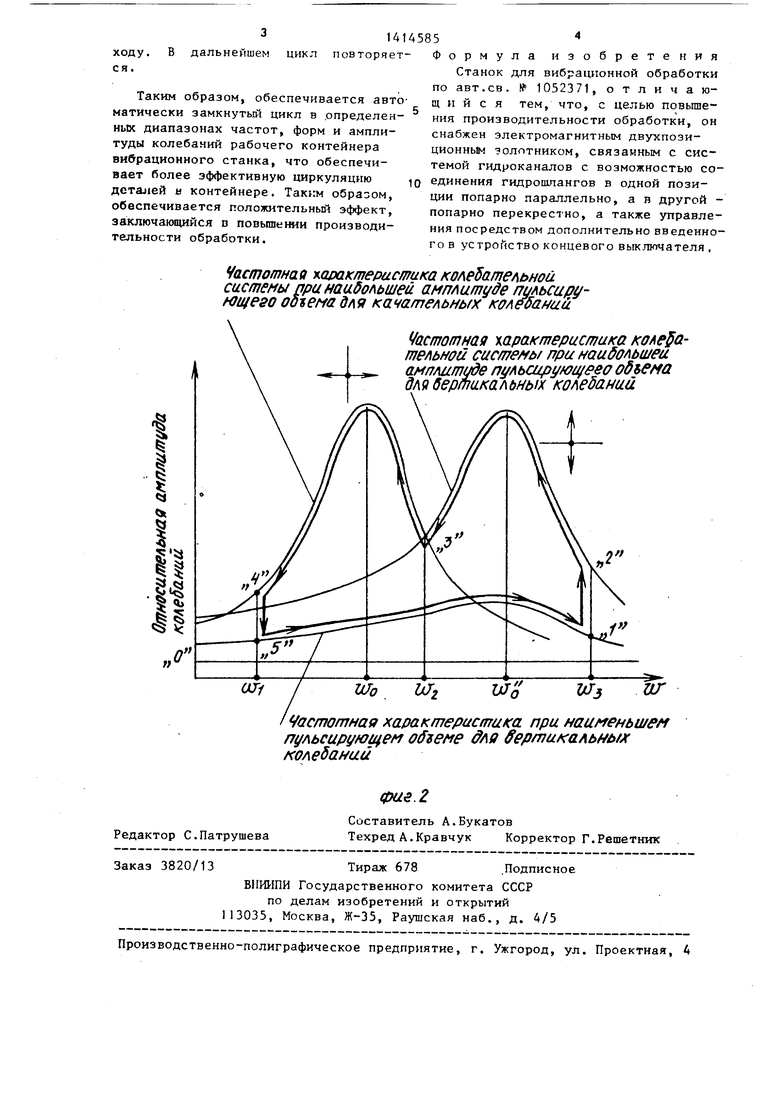
На фиг. 1 показана схема станка; на фиг. 2 - график амплитудно-частотной характеристики при работе станка JQ в резонансных режимах.
Станок для вибрационной обработки содержит гидропульсатор 1, приводимый во вращение от гидромотора 2. Станок
гоняет маховргк 16, центробежный регулятор 17 скорости и гидропульсатор 1, который в этом режиме рабо- тает вхолостую, обеспечивается перекачивание пульсирующего объема жидкости от плунжера 22 к плунжеру 23 через открытую позицию I крана 11. Постепенно разгоняясь на холостом ходу, вся вращающаяся система гидромотор, вал, маховик, регулятор, пульсатор) достигает определенной
зарезонансной частоты со,, точка
3 .
1 (фиг.2). В этой точке 1
на
снабжен системой 3 автоматического 5 частоте со, подвижный фланец 18 регулирования , смонтированной на валу (фиг.1) регулятора 3 скорости взаимо- 4, передающем вращение гидропульсатору 1 от гидромотора 2. Исполнительное устройство 5 содержит корпус 6,
20
подвижную платформу 7 с контейнером (не показан), платформа упруго установлена в корпусе 6 посредством гид- ропшангов 8 и 9 высокого давления. Электромагнитные краны 10 и 11 установлены в системах гидравлических кан:и1оп 12-15. Система 3 автоматического регулирования включает инерционный маховик 16, центробежный регулятор 17 скорости с подвгсжным фланцем 18 и конечные выключатели 19 и 20. По каналу 12 жидкость подается от гидронасоса (не показан) к гидромотору 2, а по каналу 13 она сливается в бак. Гидропульсатор состоит из ротора 21, установленного с эксцентриситетом на валу 4 и плунжерных устройств с плунжерами 22 и 23. Кроме того, станок снабжен дополнительным конечным выключателем 24, взаимодействующим с подвижным фланцем 18 центробежного регулятора 17 скорости, .который дает команду на переключение электромагнитного золотника 25 в позицию I или в позицию II. В позиции I гидрошланги исполнительного устройства гидравлически соединяются попарно: два верхних и два нижних шланга, в позиции II шланги соединяются попарно перекрестно .
Станок работает следующим образом.
Начало работы станка (пуск), точка О - разгон маховика. На этом этапе электромагнитный кран 10
действует с конечным выключателем 19 и электромагнитный кран 10 переключается в позицию I - Гидромотор отключается, а кран 11 в позицию II- пульсатор включается. Система переходит в точку 2 (фиг.2) и начинается режим торможения или обратного прохода через резонанс. Накопленная
25 энергия маховика 16 (фиг.1) передается колебательной системе, которая на частоте cD проходит резонанс вертикальных колебаний, что характеризуется значительным увеличением амп30 литуды колебаний подвижной платформы 7 исполнительного устройства 5. В дальнейшем система приходит в точку 3 на частоте о (фиг.2). На этой частоте подвижный фланец 18 (фиг.1) регулятора скорости взаимодействует с конечным выключателем 24 и электромагнитный золотник 25 переключается в позицию II. При таком положении золотника четыре шланга исполнительного устройства 5 соединяются между собой попарно перекрестно, что обеспечивает касател ь- ные колебания подвижной платформы 7 при подаче пульсующето объема от
д5 гидропульсатора 1. Для качательных колебаний резонанс наступает на час35
40
тоте СО.
а это приводит к росту
50
амплитуды колебания. Система проходит через резонанс (Мц) и, наконец, достигает точки 4 (фиг.2) на частоте СО, . На этой частоте подвижный фланец 18 (фиг.1) взаимодействует с конечным выключателем 20, электромагнитные Kpaiflit 10 и 11 и электрозолотник 25 переключаются в исходные
(фиг.1) находится о позиции II, кран позиции (10 в поз, II, 11 в поз.1 11 - в позиции I, золотник 25 в по- и 25 в поз. I). Система переходит ЗИН I. Включением вращения гидромотора 2, который через вал 4 разы точку 5 (фиг.2) и снова начинается режим разгона системы на холостом
JQ
45852
гоняет маховргк 16, центробежный регулятор 17 скорости и гидропульсатор 1, который в этом режиме рабо- тает вхолостую, обеспечивается перекачивание пульсирующего объема жидкости от плунжера 22 к плунжеру 23 через открытую позицию I крана 11. Постепенно разгоняясь на холостом ходу, вся вращающаяся система гидромотор, вал, маховик, регулятор, пульсатор) достигает определенной
зарезонансной частоты со,, точка
3 .
1 (фиг.2). В этой точке 1
на
частоте со, подвижный фланец 18 (фиг.1) регулятора 3 скорости взаимо-
действует с конечным выключателем 19 и электромагнитный кран 10 переключается в позицию I - Гидромотор отключается, а кран 11 в позицию II- пульсатор включается. Система переходит в точку 2 (фиг.2) и начинается режим торможения или обратного прохода через резонанс. Накопленная
энергия маховика 16 (фиг.1) передается колебательной системе, которая на частоте cD проходит резонанс вертикальных колебаний, что характеризуется значительным увеличением амплитуды колебаний подвижной платформы 7 исполнительного устройства 5. В дальнейшем система приходит в точку 3 на частоте о (фиг.2). На этой частоте подвижный фланец 18 (фиг.1) регулятора скорости взаимодействует с конечным выключателем 24 и электромагнитный золотник 25 переключается в позицию II. При таком положении золотника четыре шланга исполнительного устройства 5 соединяются между собой попарно перекрестно, что обеспечивает касател ь- ные колебания подвижной платформы 7 при подаче пульсующето объема от
гидропульсатора 1. Для качательных колебаний резонанс наступает на час
тоте СО.
а это приводит к росту
амплитуды колебания. Система проходит через резонанс (Мц) и, наконец, достигает точки 4 (фиг.2) на частоте СО, . На этой частоте подвижный фланец 18 (фиг.1) взаимодействует с конечным выключателем 20, электромагнитные Kpaiflit 10 и 11 и электрозолотник 25 переключаются в исходные
позиции (10 в поз, II, 11 в поз.1 и 25 в поз. I). Система переходит
ы точку 5 (фиг.2) и снова начинаетпозиции (10 в поз, II, 11 в поз.1 и 25 в поз. I). Система переходит
ся режим разгона системы на холостом
ходу, ся.
в дальнейшем цикл повторяетТаким образом, обеспечивается автоматически замкнутый цикл в определенных диапазонах частот, форм и амплитуды колебаний рабочего контейнера вибрационного станка, что обеспечивает более эффективную циркуляцию деталей к контейнере. Таким образом, обеспечивается положительньй эффект, заключающийся в повьппении производительности обработки.
Формула изобретения Станок для вибрационной обработки по авт.св. № 1052371, отличающийся тем, что, с целью повышения производительности обработки, он снабжен электромагнитным двухпози- ционным золотником, связанным с системой гидроканалов с возможностью соединения гидрошлангов в одной позиции попарно параллельно, а в другой - попарно перекрестно, а также управления посредством дополнительно введенного в устромство концевого выключателя ,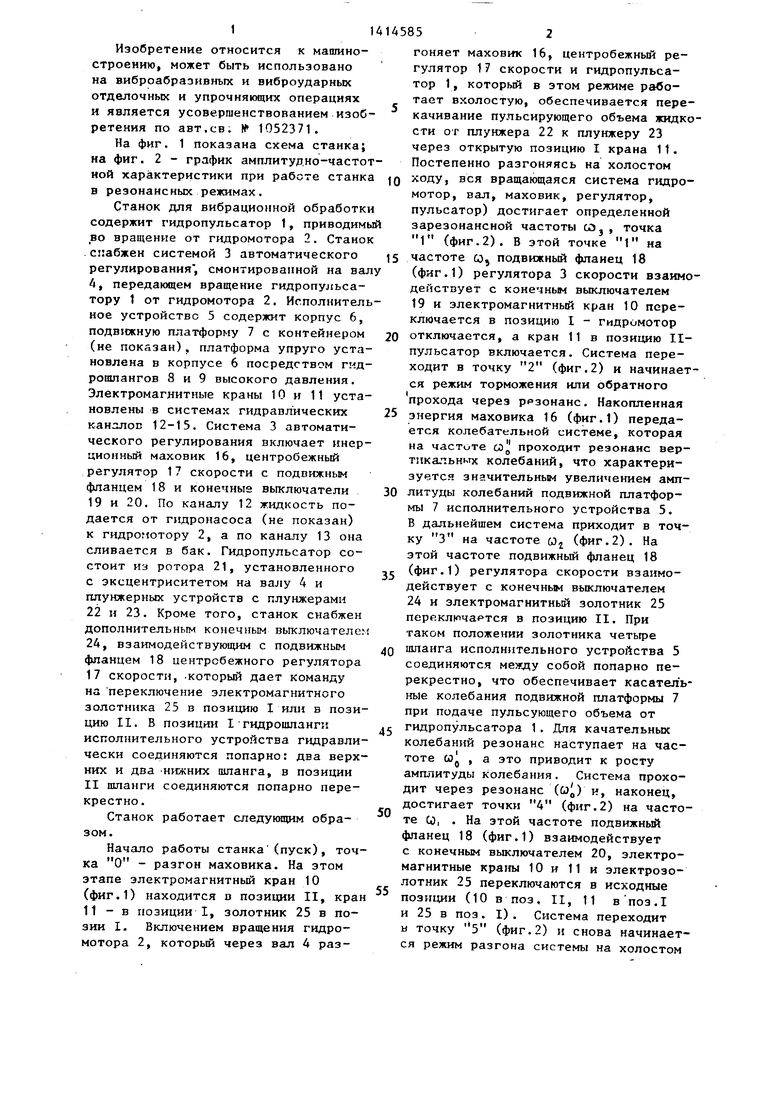
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для вибрационной обработки | 1982 |
|
SU1052371A1 |
| Многоплунжерный гидропульсатор | 1960 |
|
SU139466A1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 1969 |
|
SU250517A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| Роторный гидропульсатор | 1967 |
|
SU439632A1 |
| Гидропульсатор | 2017 |
|
RU2669060C1 |
| Гидропривод виброподачи станка | 1990 |
|
SU1728542A1 |
| Устройство для полуавтоматического управления коробкой передач транспортного средства с дизельным двигателем | 1983 |
|
SU1105339A1 |
| Станок для обработки шеек крупногабаритных коленчатых валов | 1975 |
|
SU572369A1 |
Изобретение относится к машин - строению и может быть использовано при виброабразивной и виброударной обработке деталей. Изобретение позволяет повысить производительность обработки за счет периодического изменения формы, направления и частоты колебаний рабочего контейнера (РК), в результате чего увеличивается циркуляция обрабатываемых деталей. Устройство состоит из РК, исполнитель(- ного органа на поджатьк парах гидро- ишакгов 8 и 9, гидропульсатора (ГП) 1 с приводом от гидромотора.Пульсирующий поток от ГП 1 по гидромагистралям подается в шланги и тем самым обеспечиваются колебания РК.Рабочий циял включает три основных режима (Р) работы. Первый Р - разгон с малой амплитудой колебания РК до частоты ньШ1е оезонансной. Второй Р - это обратный проход (при торможении) через резонанс вертикальных колебаний с большой амплитудой. Третий Р - проход через резонанс (при дальнейшем торможении) качлтельнмх колебаний. Переключение с Р на Р остое- ствляется с помощью электромагнитных кранов 10 и 11 и двухпозиционно- го электромагнитного золотника 25, переключение которых производится от конечных выключателей 19, 20 и 24 посредством подвижного фланца 18 центробежного регулятора скорости 17, установленного на приводном валу гидропульсатора 1. 2 ил. П с 9 (Л :л Х) СП 14)
Частотнаа исиэактеристка /(оле5а/лелмой системы при наибольшей амплитуде пульсиру- для качательных колебаний
п
5W
Частотная характеристика при наименьшем пульсируюу м offte e дла ffepfnuKaAbHt M колебаний
Частотная характеристика тельной cucmefft)/ при наиоольшеи амплитуде пульсируюа/ ео обмена длябер/пакалмых колебании
| Станок для вибрационной обработки | 1982 |
|
SU1052371A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
