Изобретение относится к геофизике, а именно к георадиолокации в условиях среды, при которой происходит естественное затухание электромагнитных сигналов, и может быть использовано для обнаружения линейных объектов, в частности трубопроводов, линий связи, в глубоководных водоемах и/или под слоем донных отложений.
Известны разные технические решения в области подповерхностной радиолокации, использующие, как правило, георадары с антеннами различной конструкции, направленные в целом на зондирование подземного пространства, в частности, талых и многолетнемерзлых пород.
Например, способ георадиолокации многолетнемерзлых пород (см. RU №2490671, кл. G01V 3/12, G01S 13/88, опубл. 20.08.2013), предусматривающий зондирование с многократным измерением сигналов в радиусе 3-5 м вокруг точек поисково-разведочной или мониторинговой геолого-геофизической сети по детерминированным схемам с элементами случайности по параметрам местоположения и ориентации приемно-передающих антенн георадара. Необходимость в многоразовом измерении сигналов с изменением положения и азимута антенн георадаров не может способствовать эффективному использованию известного технического решения в условиях поиска подводных объектов.
Известен способ исследования рельефа речного дна и его деформации с применением георадара и GPS приемника с привязкой к местности для последующего хранения и использования (см. KR №20040092508, G01V 3/00, дата подачи 04.11.2004 г.), который заключается в следующем: георадар, состоящий из блока управления передачи/приема сигналов, устанавливается на водный транспорт. Измерения проводятся с поверхности воды. Обмен данными между георадаром и GPS приемником производится с помощью блока обработки информации, который включает в себя устройства для хранения данных топографической информации и местоположения, карту памяти для хранения электронной карты, программное обеспечение для создания карты рельефа речного дна и выходной блок для вывода карты рельефа речного дна. Способ позволяет изучить рельеф речного дна, при этом не измеряет мощность донных отложений. Может быть использован для поиска локальных объектов, но не пригоден для исследования линейных подводных объектов.
Известно, что для обследования линейных подводных сооружений используются серийно выпускаемые георадары типа «ОКО» с антенными блоками, например, типа АБДЛ «Тритон» (см. www.geotech.ru), построенные в неэкранированном исполнении, состоящие из приемного и передающего блоков с блоками питания, связанные между с собой посредством интерфейсного или оптического кабеля. Антенные блоки имеют герметичное исполнение в виде полугибкого шланга, могут работать под водой и на пересеченной местности, и оснащены излучателями с диапазоном частот от 35 до 100 МГц. При зондировании подводных объектов антенный блок, как правило, буксируют посредством водного транспортного средства.
При использовании неэкранированных линейных антенных блоков типа АБДЛ «Тритон» в поиске линейных инженерных объектов под землей или под водой, к примеру, трубопроводов, кабелей и др., если проходить над линейными инженерными объектами, пересекая их перпендикулярно, то георадар не сможет обнаружить их, т.к. для георадара линейный объект видим, как локальный объект размером в ширину линейного объекта.
По этой причине наиболее эффективным способом их поиска становится тот случай, когда передатчик и приёмник георадара будут расположены параллельно линейному объекту. Однако подобное положение на практике сложно выполнить при отсутствии первоначальных сведений о расположении линейного объекта, кроме того, размеры антенного блока линейного типа в среднем составляет более 5 м в зависимости от центральной частоты линейных антенн, что не способствует качественному проведению исследовательских работ.
Известен способ исследования галсами, при котором линейный антенный блок проходит под некоторым углом к линейному объекту поиска. Но в этом случае, возникает другая задача, связанная с установлением оптимального угла положения передатчика антенного блока относительно направления искомых линейных объектов. Оптимальный угол будет достигнут в случае параллельного расположения передатчика к линейному объекту, при этом положение приемника антенного блока должно располагаться соосно оси направления движения транспортного средства с присоединенными антеннами георадара.
Задачей, на решение которой направлено настоящее изобретение, является повышение эффективности георадиолокационных исследований подводных линейных объектов.
Технический результат, получаемый при использовании изобретения, выражается в улучшении эффективности применения георадаров, оснащенных неэкранированными линейными антенными блоками, при обследовании линейных подводных объектов.
Для решения поставленной задачи способ георадиолокационного исследования подводных линейных объектов с использованием антенного устройства для георадара, содержащего корпус, неэкранированный антенный блок, включающий приемный и передающий блоки, связанные с блоками управления и регистрации, и выполненный в герметичном исполнении в виде полугибкого шланга, буксируемый при помощи, например, транспортного средства, при этом корпус устройства выполнен в плане в Y-образной форме и включает части боковых раскосов и прямого направляющего, составленные из прочного (жесткого) нетонущего и неметаллического материала, причем, максимальный регулируемый угол между боковыми раскосами составляет 135 градусов, для чего, у внешней стороны корпуса установлена дугообразная перекладина, одновременно служащая направляющим для втулки-бегунка подвижной балки, перемещающейся между раскосами, например, посредством привода с дистанционным управлением, причем, к подвижной балке с подводной стороны прикреплен передающий блок, а к прямому направляющему корпуса – приемный блок, управление которыми осуществляется через блоки управления и регистрации, например, переносной компьютер или другое записывающее устройство, включает проходку собранного антенного устройства, буксируемого водным транспортным средством, по зоне обследования подводного линейного объекта галсами при лавировке, для чего предварительно определяют оптимальный угол α первичной атаки в зависимости от положения оси исследуемого объекта, по которому настраивают положение оси передающего блока относительно оси приемного блока, далее при зондировании подводного пространства в момент обнаружения линейного объекта блоком регистрации фиксируется гипербола, а после полного прохода над искомым линейным объектом, передатчик антенного блока поворачивают на угол 2α, устанавливая параллельное положение к направлению искомого линейного объекта и снова проходят до повторного пересечения с объектом, при этом количество повторных проходов лавировкой определяется заданием на обследование объекта (детальностью съемки), по завершению которого анализируют полученные данные, фиксируемые в ходе зондирования блоком регистрации, при этом, по точкам пересечения строят линейное отображение (срез) положения объекта.
Сопоставительный анализ признаков заявленного решения с признаками аналогов свидетельствует о соответствии заявленного решения критерию «новизна».
Совокупность признаков полезной модели обеспечивает решение заявленной технической задачи, а именно повышение эффективности зондирования стандартными георадарами, оснащенными неэкранированными линейными антенными блоками, при обследовании скрытых объектов, в т.ч. в условиях с затрудненными или естественным затуханием электромагнитных сигналов, например, в глубоководных или минерализованных водоемах, или в случаях, когда линейное инженерное сооружение расположено в донных отложениях.
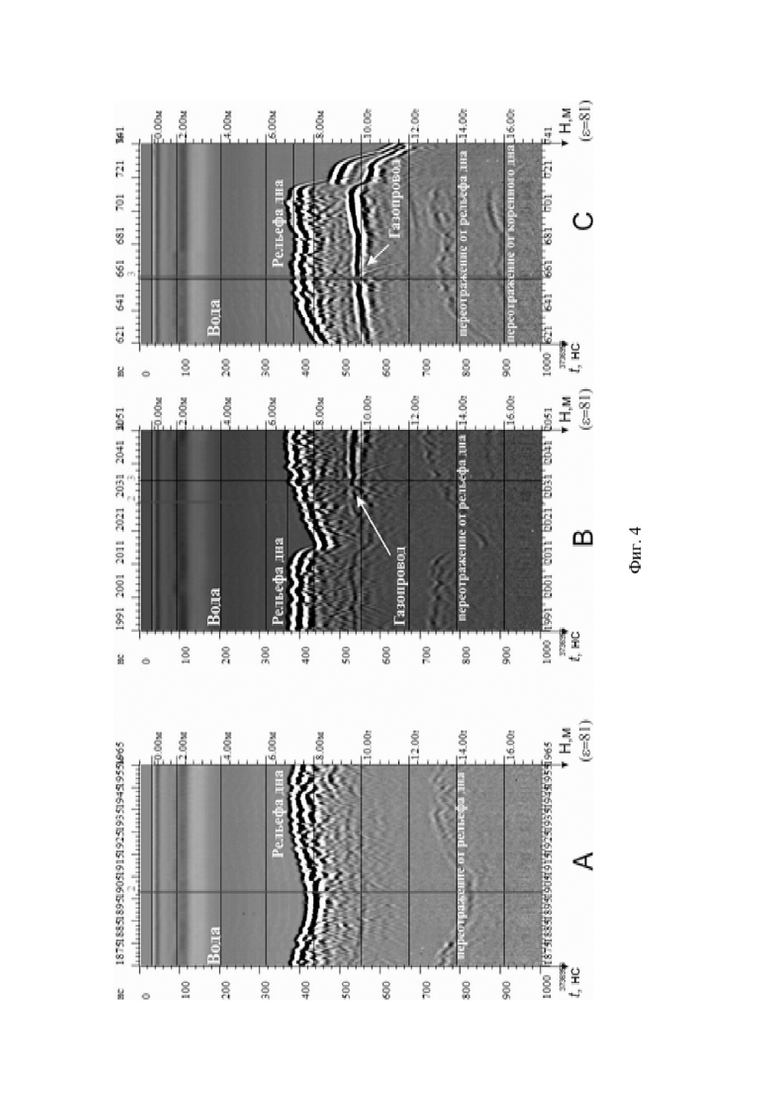
Антенное устройство иллюстрируется чертежами, где на фиг. 1 схематично показан корпус с подвижной балкой, на фиг. 2 – размещение устройств антенного блока к корпусу, где «W» - линия водной поверхности, на фиг. 3 – схема обследования подводного объекта галсами при использовании антенного устройства, фиг. 4 – образцы сравнительных снимков георадаров.
Антенное устройство для георадара состоит из корпуса, состоящего из трех частей: двух боковых раскосов 1 и прямого направляющего 2, выполненные из нетонущего и неметаллического материала, например, из пластиковых герметичных труб или древесины (см. фиг. 1). При этом части корпуса выполнены, например, разборными и жестко закреплены на разъемном соединении 3 и посредством дугообразной перекладины 4, изготовленного из неметаллического материала, например, из прочных видов пластика.
Перекладиной 4, закрепляющей боковые раскосы 1 на разъемном соединении, также устанавливается необходимый угол между раскосами 1, который может составить в пределах 135 градусов в зависимости от условий работы по обследованию объектов.
Перекладина 4 также служит направляющей для втулки-бегунка 5 подвижной балки 6, выполненной из неметаллического материала, например, из пластика или древесины. Балка 6 может быть выполнена с приводом (в т.ч. с дистанционным управлением), при этом в зависимости от варианта исполнения приводное устройство, поворачивающее балку 6, например, через систему зубчатых передач, может быть установлено на месте соединения 3 частей корпуса, при этом балка 6 другим концом опирается на перекладине 4. По другому варианту, приводное устройство установлено на месте втулки 5 и перемещает балку 6 по перекладине 4 посредством приводного бегунка, при этом балка 6 опирается другим концом на подвижной опоре места соединения 3 частей корпуса.
Прямая направляющая 2, в том числе, служит для соединения антенного устройства георадара с водным транспортным средством, для чего, с передней стороны имеет зацеп для буксирования.
Боковые раскосы 1 и прямое направляющее 2 могут быть дополнительно снабжены подводными стабилизаторами, необходимыми для удержания антенного устройства на поверхности воды во время зондирования вдоль (параллельно) направления буксировки.
С подводной стороны на подвижной балке известными способами крепятся передающий блок (передатчик) 7 антенного блока, а на прямом направляющем корпуса – приемный блок (приемник) 8 (см. фиг. 2). При этом передатчик 7 и приемник 8 связаны с блоками управления и регистрации и выполнены в герметичном исполнении в виде полугибкого шланга, например, по аналогии устройства антенного блока АБДЛ «Тритон» (см. www.geotech.ru).
Управление антенным блоком осуществляется через блоки управления и регистрации (переносной компьютер или другое записывающее устройство), размещаемые для работы, например, на борту водного транспортного средства.
Заявленное антенное устройство для георадара работает следующим образом.
На месте обследования производится сборка антенного устройства, начиная с соединения частей корпуса – боковых раскосов 1, прямого направляющего 2, дугообразной перекладины 4 и подвижной балки 6 с приводом и дистанционным управлением. При этом в зависимости от условий работы по обследованию объектов пользователем устанавливается необходимый угол между раскосами, например, в пределах 45-135 градусов. Далее, с подводной стороны подвижной балки 6 и прямого направляющего 2 прикрепляются элементы антенного блока – передатчик 7 и приемник 8. Устанавливается их связь с блоками управления и регистрации, которые размещаются на водном транспортном средстве непосредственно у самого пользователя. Подготовленное таким образом антенное устройство с георадаром зацепляется с водным транспортным средством 9 (см. фиг. 3).
Устройство может использоваться в разных случаях, например, при определении положения (направления) линейного объекта.
В неподвижном водоеме (без течения) необходимо установить такое положение георадара, при котором центр между приемником 8 и передатчиком 7 будет находиться непосредственно над исследуемым объектом 10. Поворачивая передатчик 7, наблюдают за амплитудой отраженного сигнала на устройстве регистрации. В условиях отсутствия деполяризации электромагнитных сигналов в водной среде, положение передатчика 7 при наблюдаемой максимальной амплитуде отраженного сигнала и будет направлением (осью) линейного объекта. При этом, если амплитуда отраженного от объекта сигнала не будет изменяться при изменении положения передатчика 7 – это означает что объект является не линейным, а локальным.
Для определения угла деполяризации электромагнитных сигналов в зависимости от свойств воды необходимо найти либо имеющееся линейное сооружение в исследуемом водоеме, либо самостоятельно заглубить линейный объект длиной, составляющей не менее двойной длины приемо-передающих антенн. Далее установить положение подвижной балки 6 с передатчиком 7 на нейтральный уровень, при котором балка 6 находится на одном осевом уровне с прямым направляющим 2, и определить место зондирования как нахождение центра между приемником 8 и передатчиком 7 непосредственно над исследуемым объектом 10. При этом важно, чтобы совмещенная ось приемно-передающей антенны совпадала с осью положения линейного объекта. Поворачивая передатчик 7 сначала в одну сторону, а потом в другую, наблюдают через блок регистрации за амплитудой отраженного сигнала. При определении максимальной амплитуды отраженного сигнала фиксируют угол, образованный между осями, проходящими через прямую направляющую 2 с приемником 8 и подвижную балку 6 с передатчиком 7. Этот угол будет соответствовать углу деполяризации сигналов в исследуемой водной среде.
Согласно нормативным документам при эксплуатации продуктопроводов необходимо регулярно проводить обследования линейных инженерных сооружений на речных переходах. При исследовании линейных инженерных сооружений в глубоководных водоемах, как правило, первоначально известна ось расположения трубопровода, например, по пикетам его береговых выходов. Зная ось положения трубопровода, можно внести эти данные в GPS навигатор и настраивать угол между положениями подвижной балки 6 с передатчиком 7 и прямой направляющей 2 с приемником 8 так, чтобы передатчик 7 при пересечении трубопровода всегда располагался параллельно оси трубопровода. К примеру, если обследование проводить галсами под углом в 45 градусов, нужно располагать приемо-передающие антенны под углом 45 градусов. При этом необходимо менять угол в противоположную сторону (зеркально) в зависимости от стороны пересечения оси трубопровода.
При подобной съемке отраженные сигналы от трубопроводов всегда будут с максимальными амплитудами, что очень важно при обследовании в глубоководных водоемах (или в высоко минерализованном водоеме), где происходит естественным образом затухание электромагнитных сигналов. Исследование при помощи заявленного устройства антенн георадара также будет эффективно в случаях, когда линейное инженерное сооружение расположено в донных отложениях, что приводит к затуханию сигналов и требует использования большей энергии для обнаружения объектов.
В тех же случаях, когда заранее неизвестно положение линейной неоднородности и задача связана с его поиском, то установка положения оси подвижной балки 6 с передатчиком 7 на угол в 45 градусов относительно оси прямой направляющей 2 с приемником 8, способствует расширению обзора (поиска) линейной неоднородности. В таком положении даже при перпендикулярном пересечении линейного объекта будет получен отраженный сигнал.
Поисковые работы при помощи заявленного антенного устройства для георадара осуществляются в следующем порядке.
Например, на первом этапе обследования линейных инженерных сооружений на речных переходах собранное антенное устройство с георадаром, буксируемое водным транспортным средством 9, «атакует» в сторону исследуемого объекта 10 под оптимальным углом «альфа» (см. фиг. 3), значение которого предварительно определяется по данным положения оси исследуемого объекта по выходам на берег. На такой же угол «альфа» настраивается положение оси передатчика 7 относительно оси прямой направляющей 2 с приемником 8. Таким образом, пользователем устанавливается лучшее проявление отраженного сигнала, соответствующее параллельному положению передатчика 7 к подводному линейному объекту 10. Скорость движения устройств по поверхности воды при зондировании составляет 0,3-2,5 м/с.
При подходе к объекту пользователем, которым непрерывно зондируется подводное пространство, в момент обнаружения возможного объекта посредством блока регистрации (переносного компьютера или иного записывающего устройства) фиксируется гипербола. При этом направление и скорость движения буксирующего транспортного средства 9 остаются неизменными в период пересечения исследуемого объекта 10.
После полного прохода над искомым линейным объектом 10, буксирующее транспортное средство 9 поворачивает на угол «альфа» в сторону исследуемого объекта 10, при этом, передатчик 7 одновременно устанавливается на нейтральное положение.
Следующим этапом буксирующее средство 9 и передатчик 7, каждый по отдельности, одновременно поворачивают в сторону объекта 10 на угол «альфа», устанавливая параллельное положение передатчика 7 к объекту 10, и проплывают до повторного пересечения линейного объекта 10. Таким образом, цикл повторяется необходимое количество раз в виде галсов, пересекающих линейных объект 10.
На фиг. 4 представлены сравнительные снимки при исследованиях линейных подводных объектов в сложных условиях (глубоководные водоемы, наличие большой мощности донных отложений), полученные при помощи заявленного антенного устройства.
Данные показывают, что при пересечении трубопровода под некоторым углом, при котором ось передатчика 7 расположена параллельно к оси линейного инженерного сооружения, хорошо обнаруживается трубопровод в виде гиперболы (см. фиг. 4В и фиг. 4С), в отличие от иного случая, когда передатчик 7 пересекает трубопровод под углом 90 градусов, при котором объект уже не обнаруживается (см. фиг. 4А). Следует отметить, что при использовании заявленного устройства уменьшается количество гипербол, отраженных от различных локальных объектов, такие как крупные валуны и локальные металлические объекты.
В результате такой съемки отраженные сигналы от трубопроводов будут получены с максимальными амплитудами, что важно при обследовании в глубоководных водоемах (или в высоко минерализованном водоеме), где происходит затухание электромагнитных сигналов. Также это эффективно в случаях, когда линейное инженерное сооружение расположено в донных отложениях, где также происходит затухание, и необходимо больше энергии для обнаружения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ зимнего георадиолокационного исследования подводных объектов | 2024 |
|
RU2825556C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ГЕОРАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2707419C1 |
| Способ обнаружения границы локального подземного торфяного пожара и робот для проведения разведки подземных торфяных пожаров | 2016 |
|
RU2625602C1 |
| УСТРОЙСТВО ДЛЯ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640291C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ "ГФК-1" | 2005 |
|
RU2283519C1 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| Способ измерения параметров слоев дорожной одежды | 2019 |
|
RU2735312C1 |
| СПОСОБ ГЛУБИННОЙ ГЕОРАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2816128C1 |


Изобретение относится к геофизике, а именно к георадиолокации в условиях среды, при которой происходит естественное затухание электромагнитных сигналов, и может быть использовано для обнаружения линейных объектов, в частности трубопроводов, линий связи и др. Способ георадиолокационного исследования подводных линейных объектов с использованием антенного устройства для георадара, содержащего корпус, неэкранированный антенный блок, включающий приемный и передающий блоки, связанные с блоками управления и регистрации, и выполненный в герметичном исполнении в виде полугибкого шланга, буксируемый при помощи транспортного средства, при этом корпус устройства выполнен в плане в Y-образной форме и включает части боковых раскосов и прямого направляющего, составленные из прочного нетонущего и неметаллического материала, причем максимальный регулируемый угол между боковыми раскосами составляет 135 градусов, для чего у внешней стороны корпуса установлена дугообразная перекладина, одновременно служащая направляющим для втулки-бегунка подвижной балки, перемещающейся между раскосами посредством привода с дистанционным управлением, причем к подвижной балке с подводной стороны прикреплен передающий блок, а к прямому направляющему корпуса – приемный блок, управление которыми осуществляется через блоки управления и регистрации, включающий проходку собранного антенного устройства, буксируемого водным транспортным средством, по зоне обследования подводного линейного объекта галсами при лавировке, для чего предварительно определяют оптимальный угол α первичной атаки в зависимости от положения оси исследуемого объекта, по которому настраивают положение оси передающего блока относительно оси приемного блока, далее при зондировании подводного пространства в момент обнаружения линейного объекта блоком регистрации фиксируется гипербола, а после полного прохода над искомым линейным объектом, путем поворота передатчика антенного блока устанавливают параллельное положение к направлению искомого линейного объекта и снова проходят до повторного пересечения с объектом, при этом количество повторных проходов лавировкой определяется заданием на обследование объекта, по завершению которого анализируют полученные данные, фиксируемые в ходе зондирования блоком регистрации, и по точкам пересечения строят линейное отображение (срез) положения объекта. Использование изобретения позволит повысить эффективность георадаров при обследовании линейных подводных объектов, в том числе при обследовании в глубоководных водоемах и в случаях, когда линейное инженерное сооружение расположено в донных отложениях. 4 ил.
Способ георадиолокационного исследования подводных линейных объектов с использованием антенного устройства для георадара, содержащего корпус, неэкранированный антенный блок, включающий приемный и передающий блоки, связанные с блоками управления и регистрации, и выполненный в герметичном исполнении в виде полугибкого шланга, при этом корпус устройства выполнен в плане в Y-образной форме и включает части боковых раскосов и прямого направляющего, составленные из жесткого нетонущего и неметаллического материала, причем максимальный регулируемый угол между боковыми раскосами составляет 135 градусов, для чего у внешней стороны корпуса установлена дугообразная перекладина, одновременно служащая направляющим для втулки-бегунка подвижной балки, перемещающейся между раскосами, причем к подвижной балке с подводной стороны прикреплен передающий блок, а к прямому направляющему корпуса – приемный блок, управление которыми осуществляется через блоки управления и регистрации, включающий проходку собранного антенного устройства, буксируемого водным транспортным средством, по зоне обследования подводного линейного объекта галсами при лавировке, для чего предварительно определяют оптимальный угол α первичной атаки в зависимости от положения оси исследуемого объекта, по которому настраивают положение оси передающего блока относительно оси приемного блока, далее при зондировании подводного пространства в момент обнаружения линейного объекта блоком регистрации фиксируется гипербола, а после полного прохода над искомым линейным объектом передатчик антенного блока поворачивают на угол 2α, устанавливая параллельное положение к направлению искомого линейного объекта и снова проходят до повторного пересечения с объектом, при этом количество повторных проходов лавировкой определяется необходимой детальностью съемки, по завершению которой анализируют полученные данные по точкам пересечения, фиксируемые в ходе зондирования блоком регистрации, и строят линейное отображение положения объекта.
| WO9901781 A1, 14.01.1999 | |||
| DE 102015015386 A1, 01.06.2017 | |||
| US2011090119 A1, 21.04.2011 | |||
| US4728897 A, 01.03.1988 | |||
| WO2014112261 A1, 24.07.2014. |

