[001] Настоящее изобретение имеет отношение к усовершенствованному устройству для разъединения продуктов сельского хозяйства или растениеводства, соединенных между собой отростками, такими как черешки, плодоножки, стебли и т.д., например вишен, небольших кистей томатов «черри» и других, которые были собраны и которые обычно доставляют соединенными в небольшие пучки или которые остаются соединенными между собой соответствующими плодоножками, в частности в случае вишен.
[002] В частности, настоящее изобретение имеет отношение к конкретному усовершенствованию устройства, описанного ранее в патентной заявке РСТ/IB2013/054267, с приоритетом от 9 июля 2012 года, того же заявителя.
В отношении описания устройства, раскрытого ниже, и обоснования соответствующего изобретения, для краткости и ясности изложения заявитель ссылается непосредственно на упомянутую патентную заявку PCT/IB2013/054267.
[003] Хотя устройство, раскрытое в патентной заявке PCT/IB2013/054267, оказалось эффективным и в полной мере пригодным для его назначения, в процессе реальной эксплуатации было обнаружено, что достаточно часто могут возникать ранее непредвиденные рабочие условия; эти непредвиденные рабочие условия заключаются в том, что определенную партию вишен иногда необходимо обрабатывать, то есть отбирать и разъединять, не с помощью механических устройств, а вручную - либо по причине их значительной спелости, либо потому, что они обладают особыми свойствами, имеющими отношение к размеру или плотности пучков, и т.д.
[004] Поскольку эти конкретные вишни не могут быть успешно обработаны в устройстве, которое описано в предыдущей патентной заявке, их необходимо отбирать и разъединять вручную совершенно обычным способом.
Однако для большого предприятия по переработке свежесобранных вишен, подлежащих доставке потребителю в больших количествах, реальная ситуация, которая обычно имеет место во время сбора урожая, заключается в том, что большие партии вишен прибывают на одно и то же перерабатывающее предприятие с различной частотой, и при этом отдельные партии могут состоять из вишен таких сортов, которые имеют совершенно различные свойства.
[005] В частности, партии вишен, поступающие на перерабатывающее предприятие, которые могут быть обработаны с помощью устройства соответствующего упомянутому выше изобретению, чередуются с другими партиями вишен, которые, напротив, не могут быть обработаны с помощью устройства того же вида, а нуждаются в ручной обработке.
В любом случае все партии вишен, независимо от их качества и свойств, не различая их между собой, выгружают в большой лоток, наполненный водой, откуда их, обычно с использованием конвейерной ленты, перемещают и выгружают на подвижный стол, который занимает упомянутую поверхность S, как она обозначена в упомянутой выше патентной заявке.
[006] Только на этом этапе для каждой партии вишен выполняют оценку, и принимают решение, следует ли сортировать и обрабатывать вишни в этой партии с помощью устройства или вручную.
В первом случае остальную часть процесса обычно выполняют с помощью устройства по упомянутому выше изобретению.
Во втором случае, с другой стороны, ситуация такова, что вишни, даже если они уже находятся на упомянутом подвижном столе, следует обрабатывать вручную.
[007] В этом случае необходимо избежать обработки вишен в устройстве по упомянутому выше изобретению, поскольку эту партию или определенные партии вишен необходимо переместить в другую(-ое) обрабатывающую(-ее) установку/устройство.
Операция такого рода обычно является затратной с точки зрения времени и ресурсов, требуя не только размещения персонала и оборудования, предназначенного для этого, но также иногда являясь причиной вынужденного в течение определенных периодов времени простоя персонала, который в ином случае был бы задействован полностью, непрерывно и, следовательно, более эффективно.
[008] Поскольку эти операции, принимая во внимание обстановку высокой конкуренции, в которой они осуществляются, должны выполняться с очень высоким уровнем эффективности и, следовательно, скорости, то предпочтительно, чтобы партии вишен, уже помещенные на упомянутый выше подвижный стол, оставались на нем, даже если соответствующие вишни следует обрабатывать вручную, а не с помощью соответствующего устройства.
Однако использование описанного выше устройства делает это невозможным, поскольку устройство продолжает работать, т.е. соответствующий подвижный стол продолжает транспортировать вишни к месту перерезания их плодоножек, поскольку последние в любом случае подхватываются соответствующими наклонными направляющими, и после этого перерезаются вращающимися режущими элементами.
[009] Кроме того, следует принимать во внимание, что если часть устройства, состоящую из вращающихся валов, соответствующих наклонных направляющих, соответствующих вращающихся режущих элементов и соединенных с ними элементов, можно было бы убрать со стола и, в частности, из области пространства над ним, то сам подвижный стол все еще можно было бы использовать как средство транспортировки вишен, и как средство, на котором операторы могут выполнять свои задачи обычным способом, что обеспечивает определенные преимущества.
На практике упомянутому подвижному столу всегда можно найти применение - с упомянутыми вращающимися валами, соответствующими наклонными направляющими, соответствующими вращающимися режущими элементами и соединенными с ними элементами, или без всех этих элементов, независимо от вида выполняемой операции, т.е. выполняемой механическим способом или вручную, несмотря на то, что вид выполняемой операции может быть определен только в последний момент, и операция ручной обработки всегда может выполняться на том же подвижном столе и, следовательно, без необходимости куда-либо транспортировать вишни, требующие ручной обработки.
[0010] Однако эта альтернатива, несомненно, связана и находится в зависимости от условия отсутствия препятствий со стороны перечисленных выше устройств, которые, следовательно, необходимо как можно быстрее, полностью и беспрепятственно убрать и переместить от пути прохождения пучков вишен, т.е. из области пространства, которая точно соответствует области пространства, расположенной над упомянутым подвижным столом, чтобы ручную обработку можно было выполнять безопасно и беспрепятственно.
[0011] Поэтому было бы желательно, и это является основной целью настоящего изобретения, предложить устройство такого типа, которое пригодно для перерезания плодоножек продуктов сельского хозяйства, которые соединены в пучки, которое является многофункциональным по отношению к различным видам продуктов, подлежащих обработке, то есть такое устройство, которое позволяет:
- резать упомянутые плодоножки в том месте, где они соединены между собой, механическим и полностью автоматизированным способом, или
- использовать разгрузочный и транспортировочный стол также как рабочую поверхность для ручного отбора и обработки продуктов сельского хозяйства назначенными для этого операторами в соответствии с известными способами.
Эта цель достигнута созданием устройства, имеющего конструкцию и работающего в соответствии с прилагаемой формулой изобретения.
[0012] Особенности и преимущества этого изобретения станут более понятными из дальнейшего описания, приведенного как пример, который не ограничивает объем этого изобретения, со ссылкой на прилагаемыечертежи, на которых
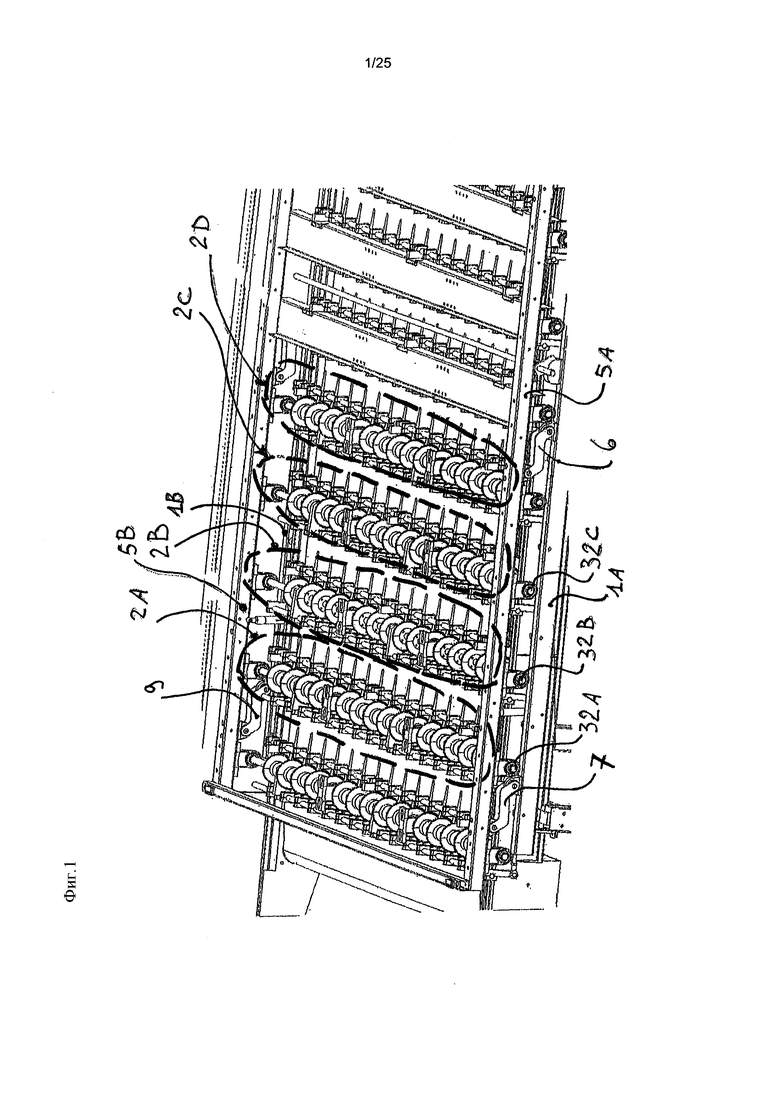
на Фиг. 1 показан внешний вид в перспективе устройства по настоящему изобретению;
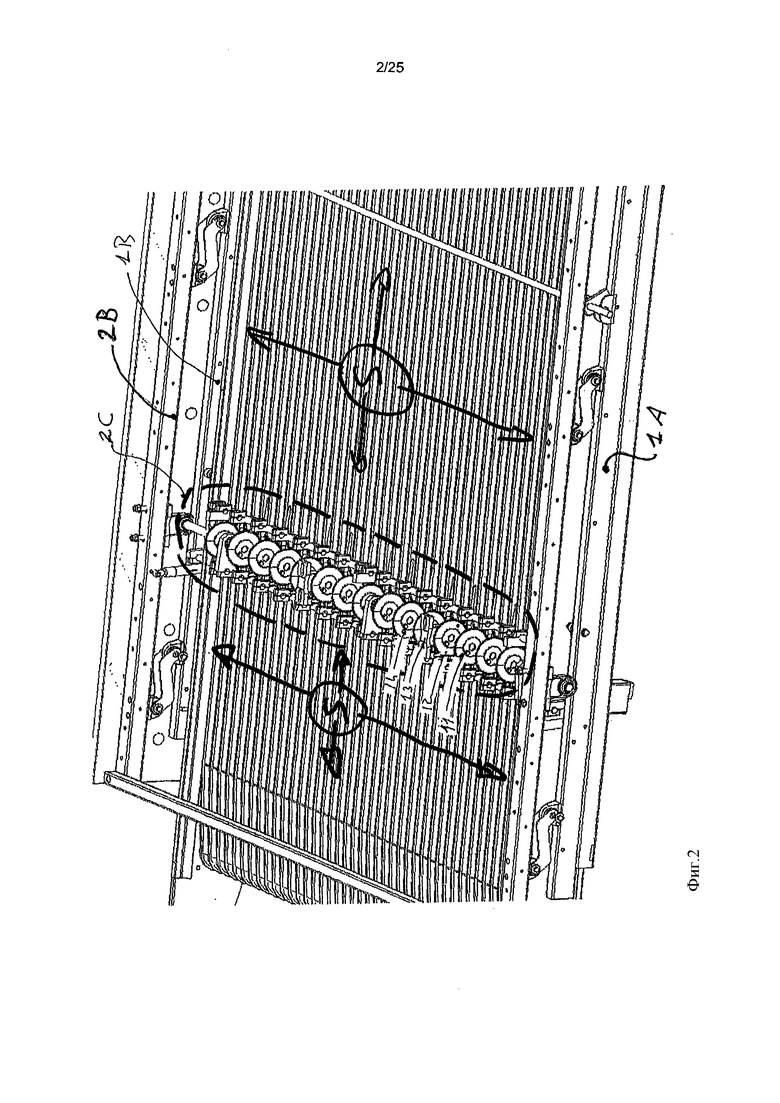
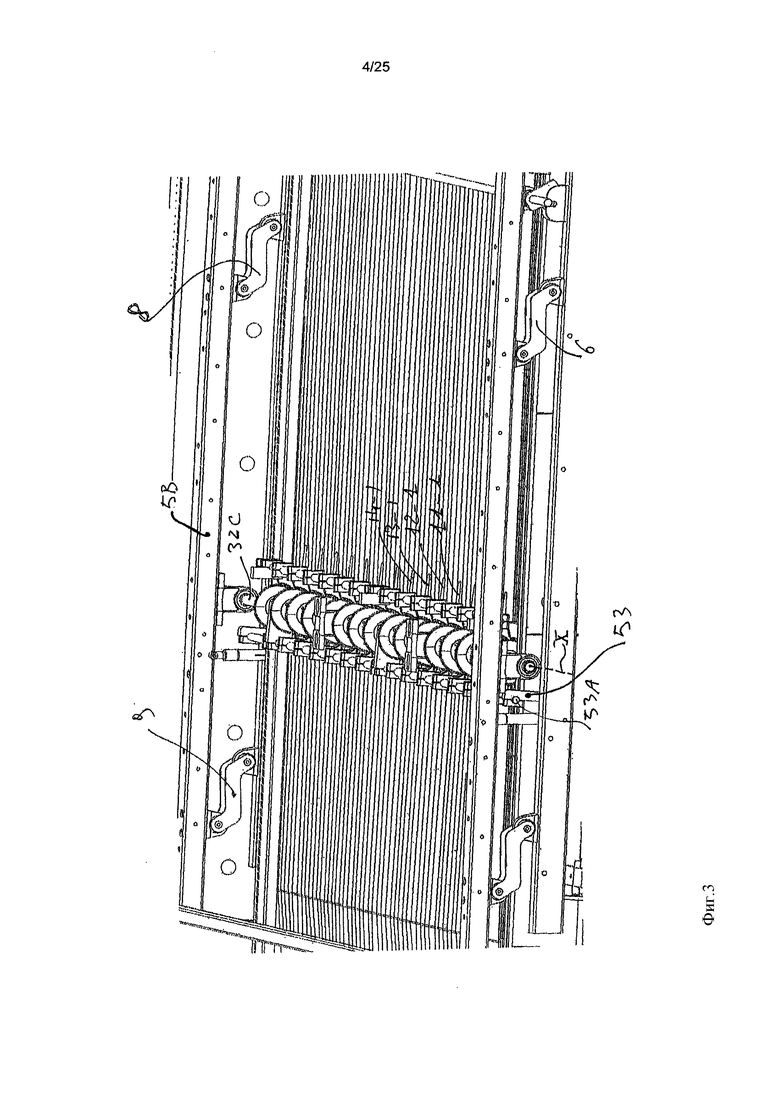
на Фиг. 2, Фиг. 3 и Фиг. 4 показаны соответствующие схематические виды в увеличенном масштабе устройства, подобного показанному на Фиг.1, соответствующие положениям отдельного режущего модуля устройства по настоящему изобретению во время работы;
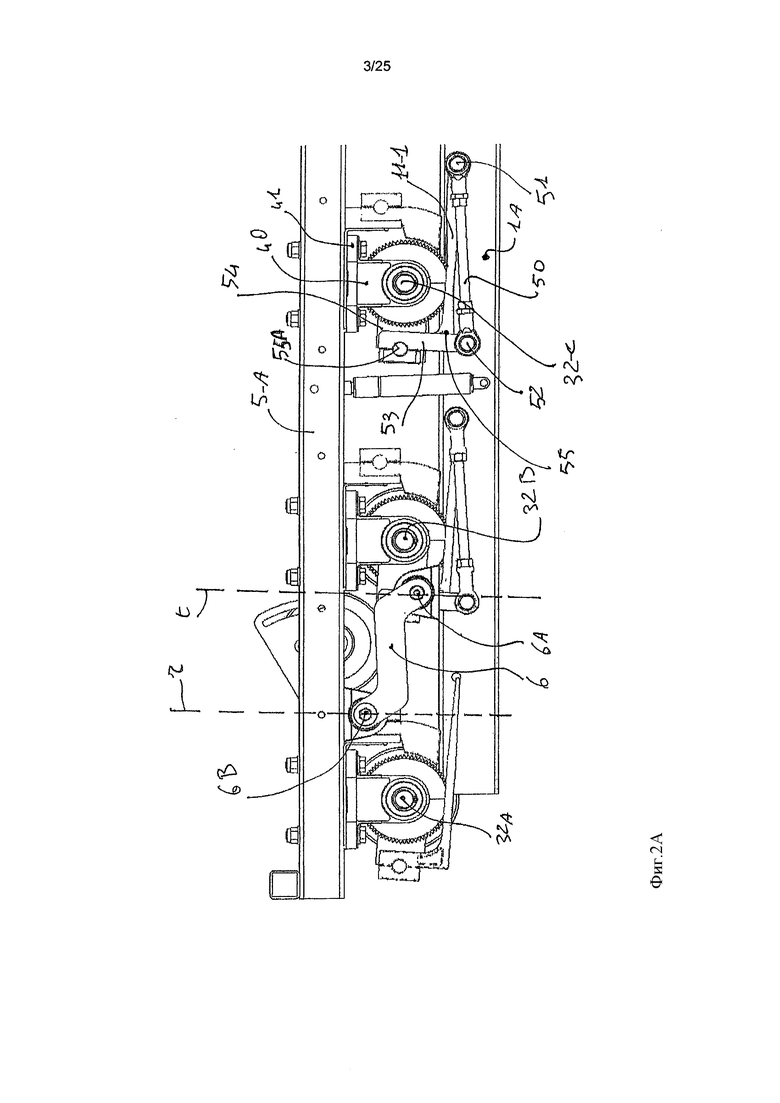
на Фиг. 2А, Фиг. 3А и Фиг. 4А показаны соответствующие виды сбоку части устройства по настоящему изобретению, соответствующие положениям, показанным на Фиг. 2, Фиг. 3 и Фиг. 4, соответственно;
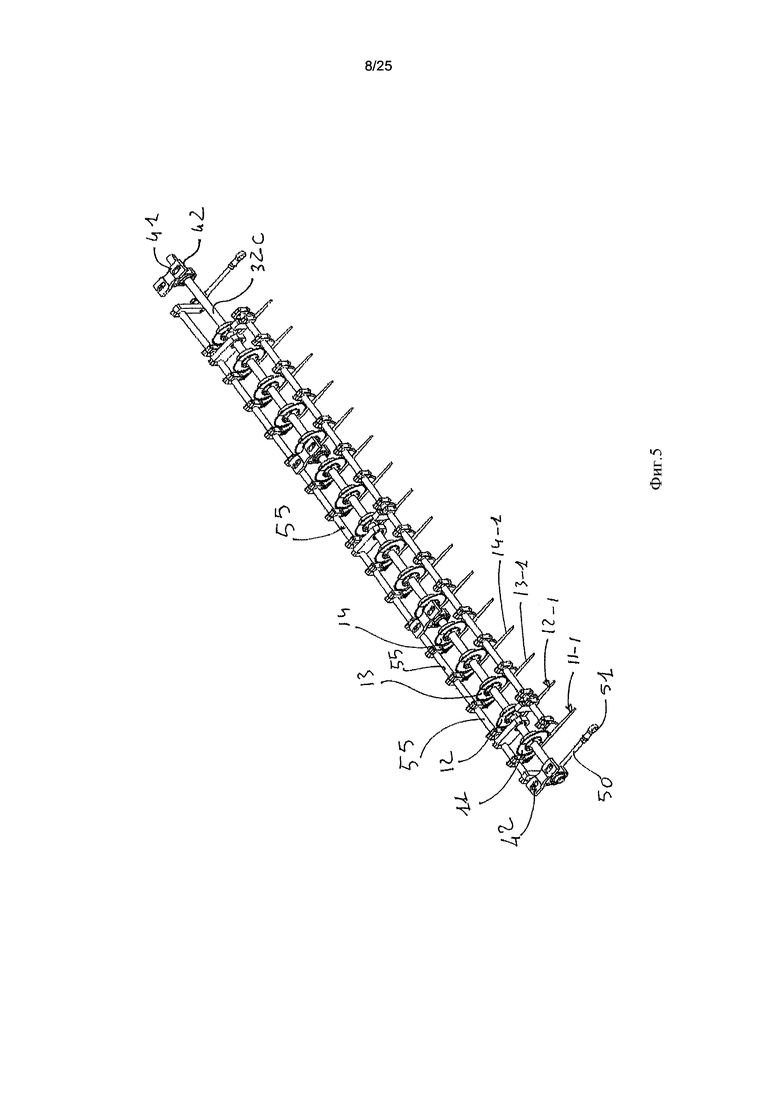
на Фиг. 5 показан упрощенный вид сверху в перспективе части устройства, показанного на Фиг. 1, видимый из точки, расположенной перед осью вращения режущих элементов;
на Фиг. 6 показан вид устройства, подобного показанному на Фиг. 5, однако с одной из частей в увеличенном масштабе и с направлением взгляда из точки, расположенной ближе к оси вращения вращающихся режущих элементов;
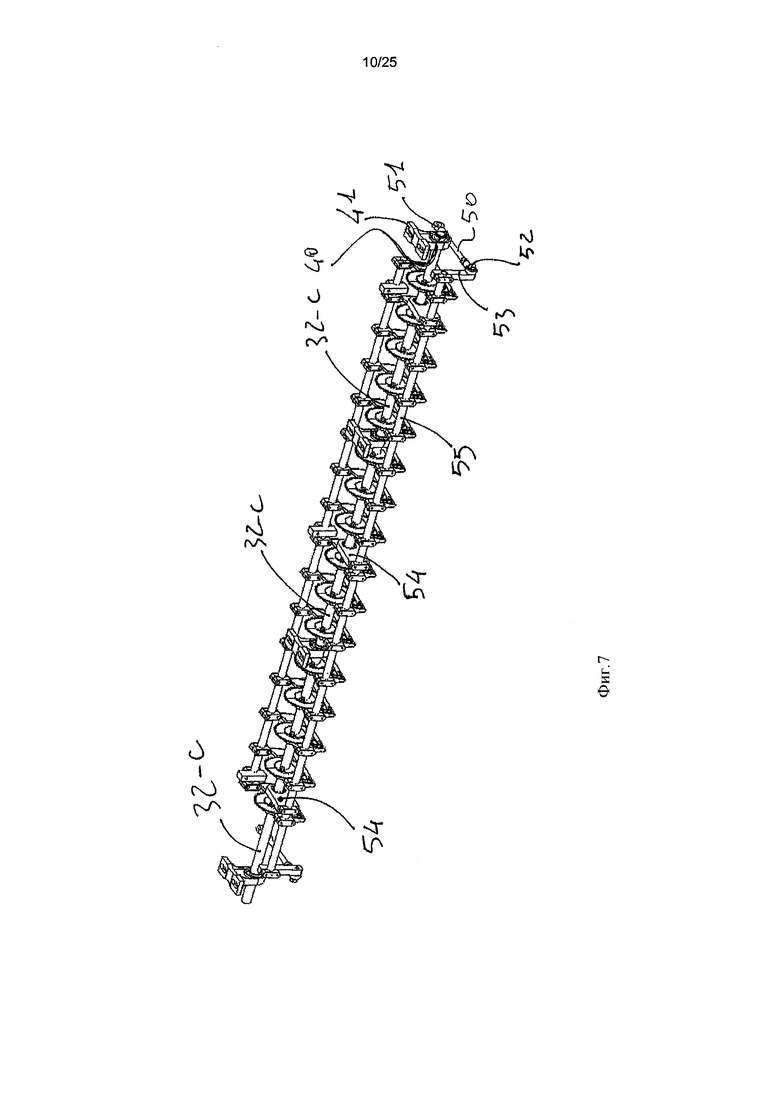
на Фиг. 7 показан вид в косоугольной проекции части устройства, изображенного на Фиг. 5, видимый из точки, расположенной позади оси вращения вращающихся режущих элементов;
на Фиг. 7А показана в увеличенном масштабе латеральная часть той части устройства, которая изображена на Фиг. 7;
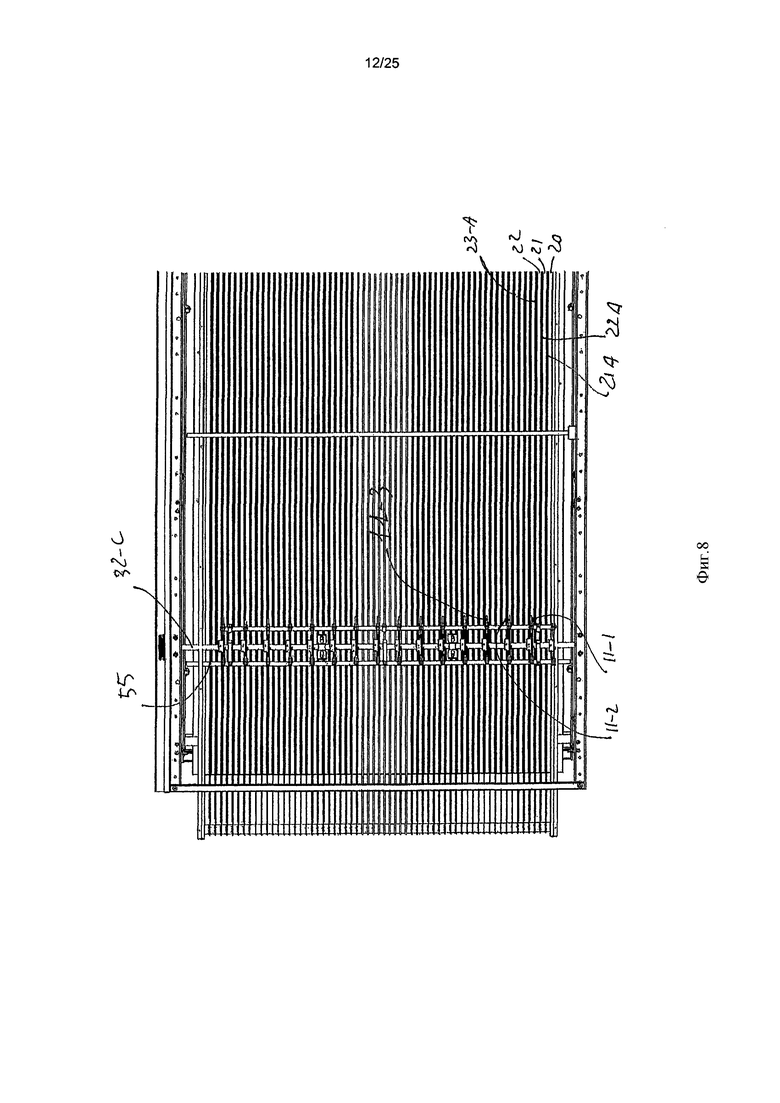
на Фиг. 8 показан вид сверху части устройства, изображенной на Фиг. 5-7А;
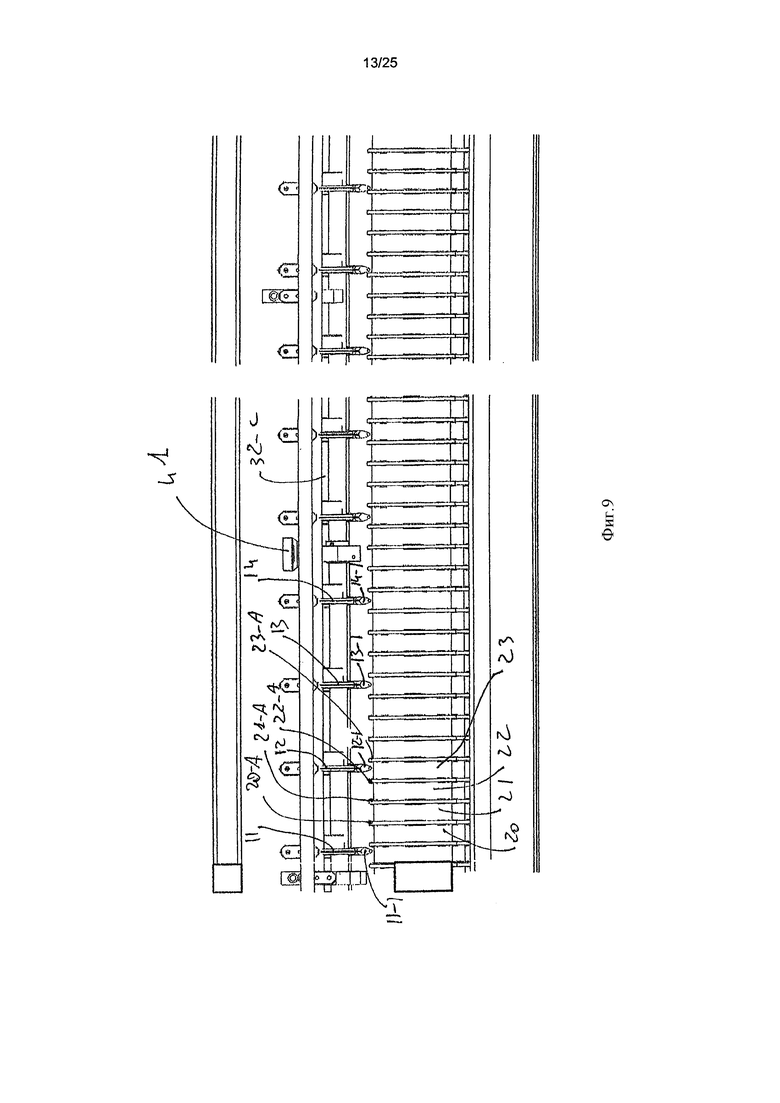
на Фиг. 9 показан вид спереди устройства, изображенного на Фиг. 5-7А;
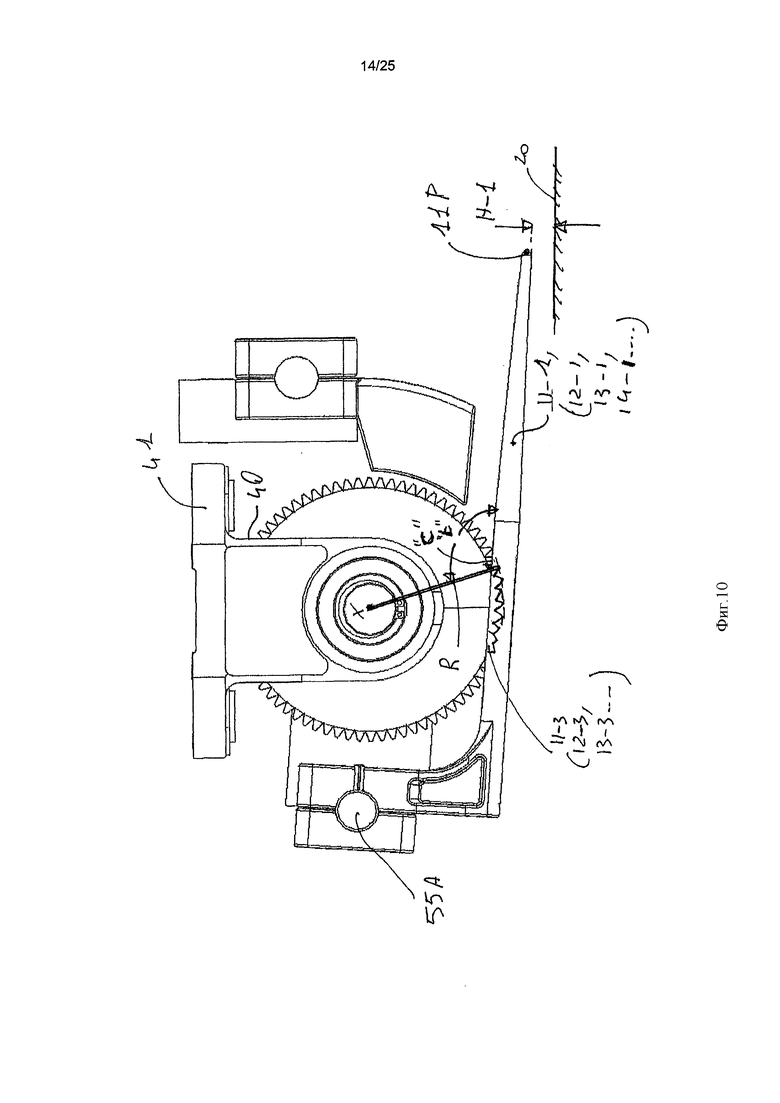
на Фиг. 10 показан выровненный вид сбоку части устройства, изображенного на упомянутых выше Фиг. 5-7А;
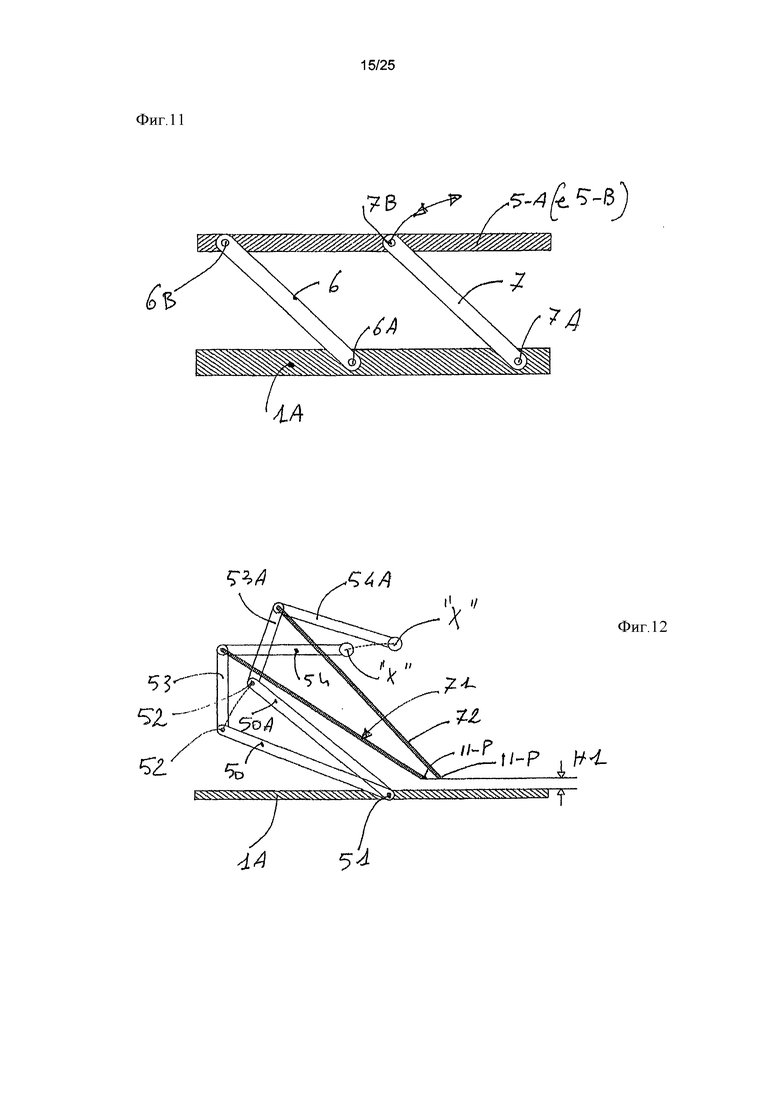
на Фиг. 11 показано схематическое представление способа работы настоящего изобретения;
на Фиг. 12 показано упрощенное геометрическое схематическое представление работы настоящего изобретения, как видно на на виде сбоку.
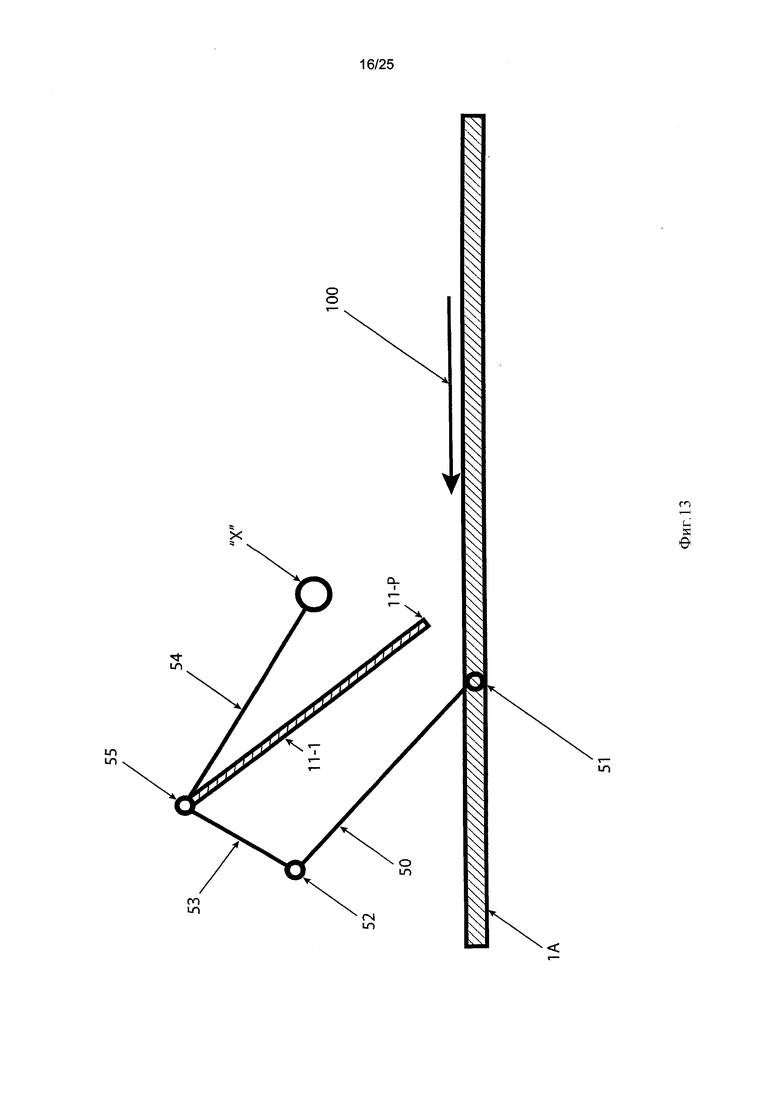
на Фиг. 13 показано первоначальное упрощенное схематическое представление усовершенствованного способа работы настоящего изобретения;
на Фиг. 14 показано упрощенное схематическое представление усовершенствованного способа работы настоящего изобретения, показанного на Фиг. 13, после запуска усовершенствованного режима работы;
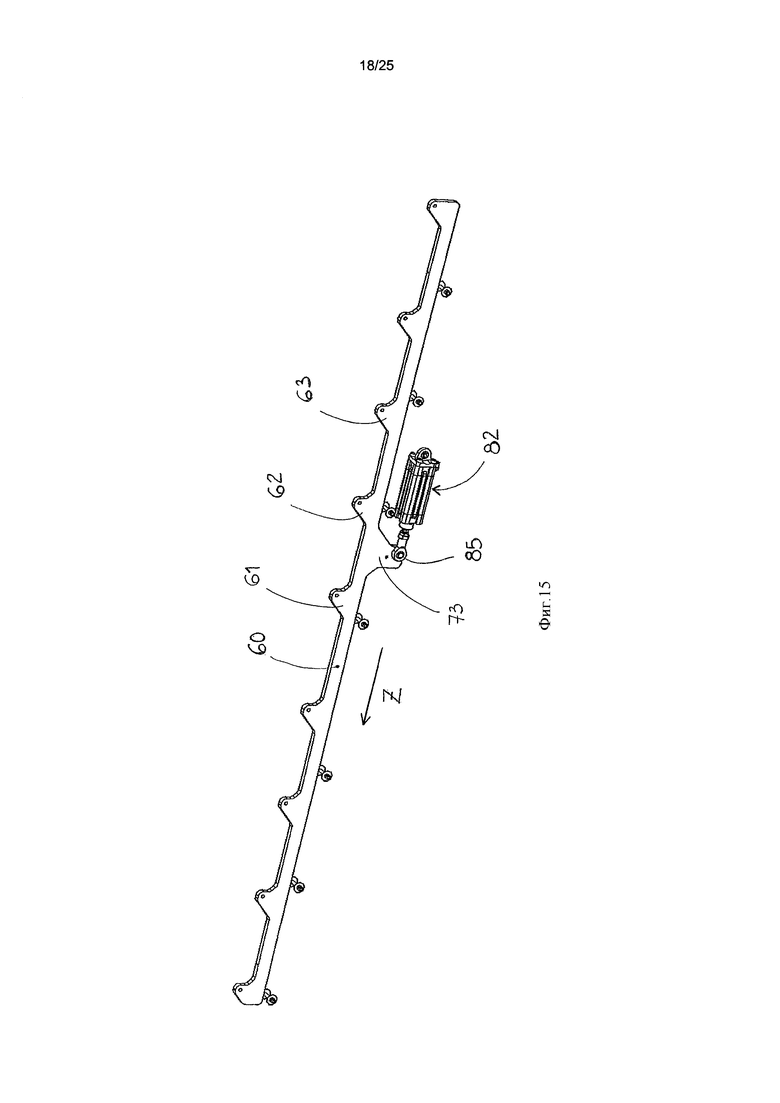
на Фиг. 15 показан вид в перспективе элемента устройства, работающего в соответствии со схематическим представлением, показанным на Фиг. 13 и Фиг. 14;
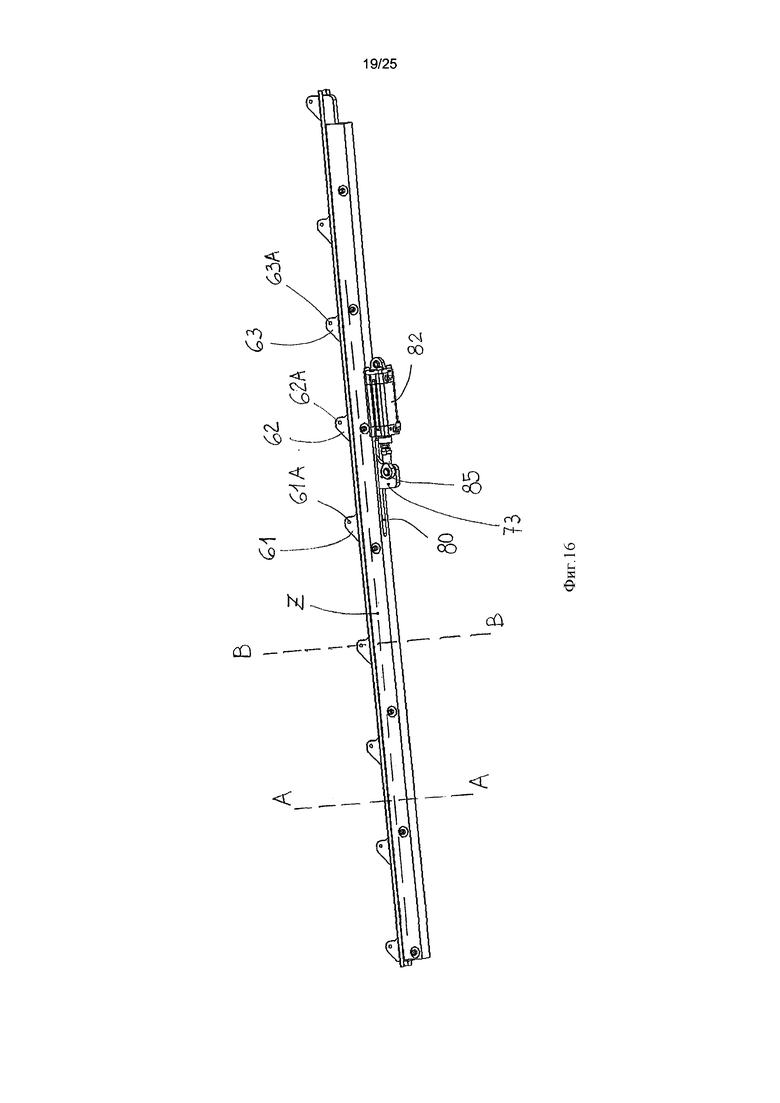
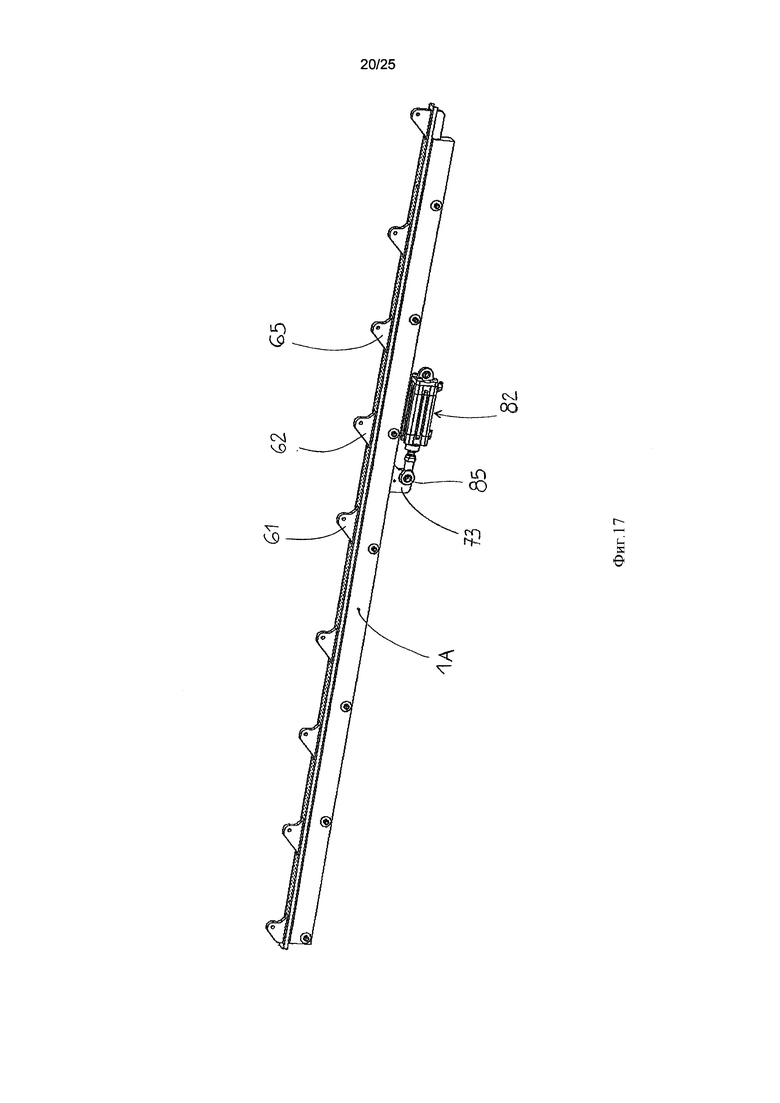
на Фиг. 16 и Фиг. 17 показано упрощенное схематическое представление элемента, изображенного на Фиг. 15, после его сборки в условиях эксплуатации, который показан в перспективе, соответственно снизу и сверху;
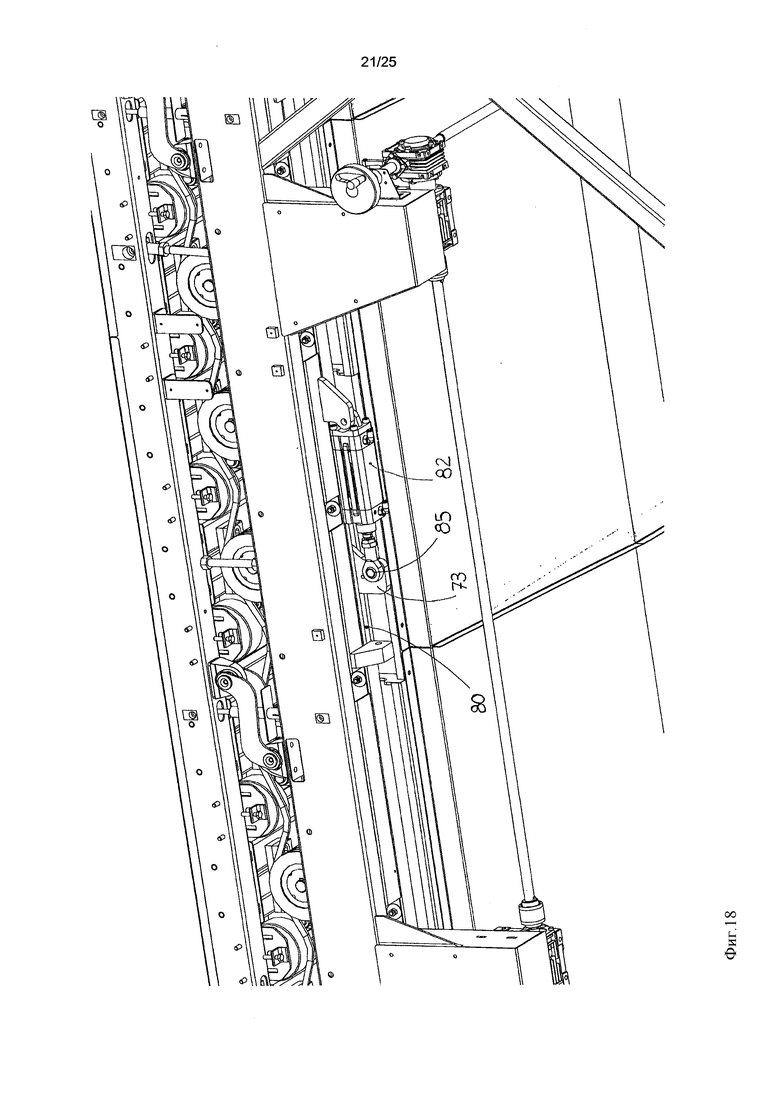
на Фиг. 18 показан вид в перспективе сбоку и снизу той части устройства, которая содержит усовершенствование, изображенное на Фиг. 13-17;
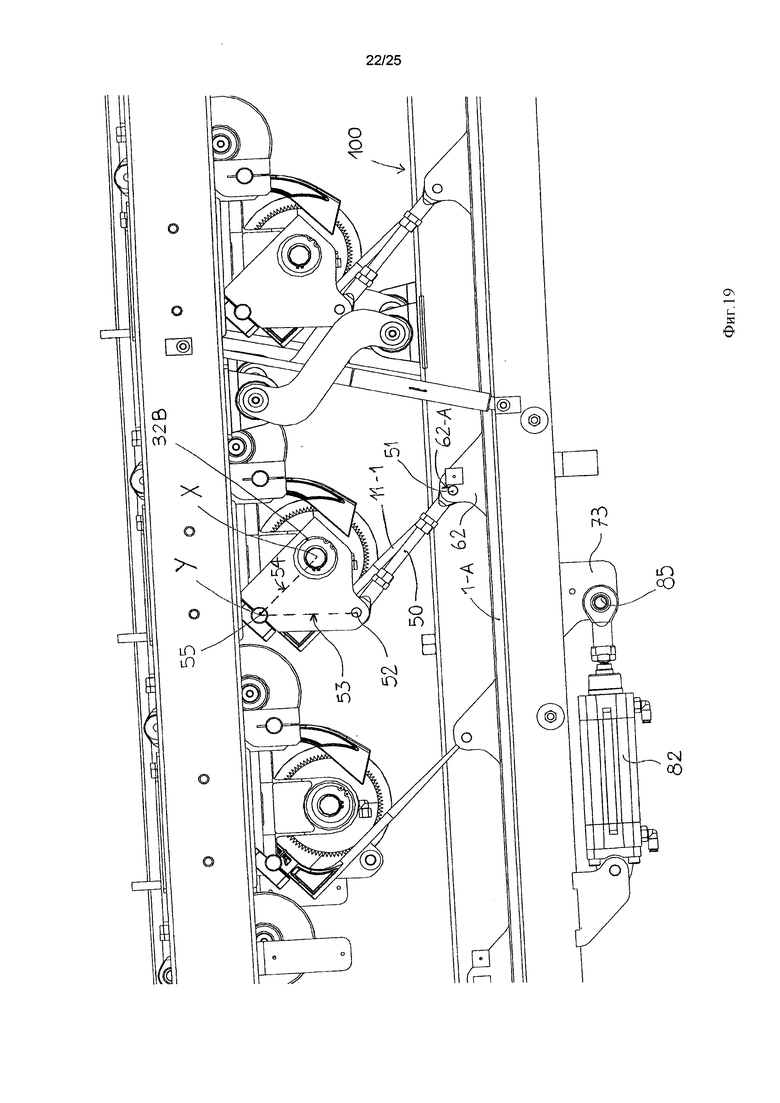
на Фиг. 19 показан вид части устройства, в целом подобной показанной на Фиг. 4А, но с наклонными направляющими, все еще расположенными под определенным наклоном в своем нормальном рабочем положении;
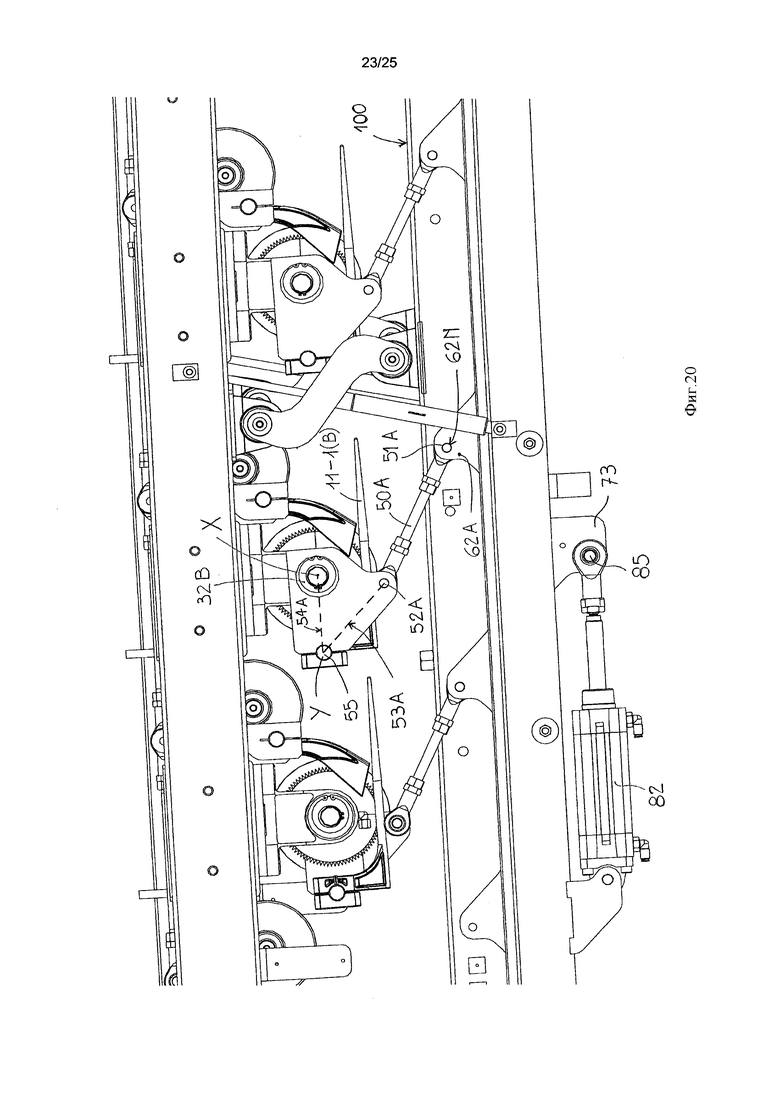
на Фиг. 20 показан вид части устройства, соответствующей показанной на Фиг. 19, но с наклонными направляющими, которые были подняты из своего предыдущего наклонного положения и подвергнуты вращению до тех пор, пока они не достигли более или менее горизонтального положения;
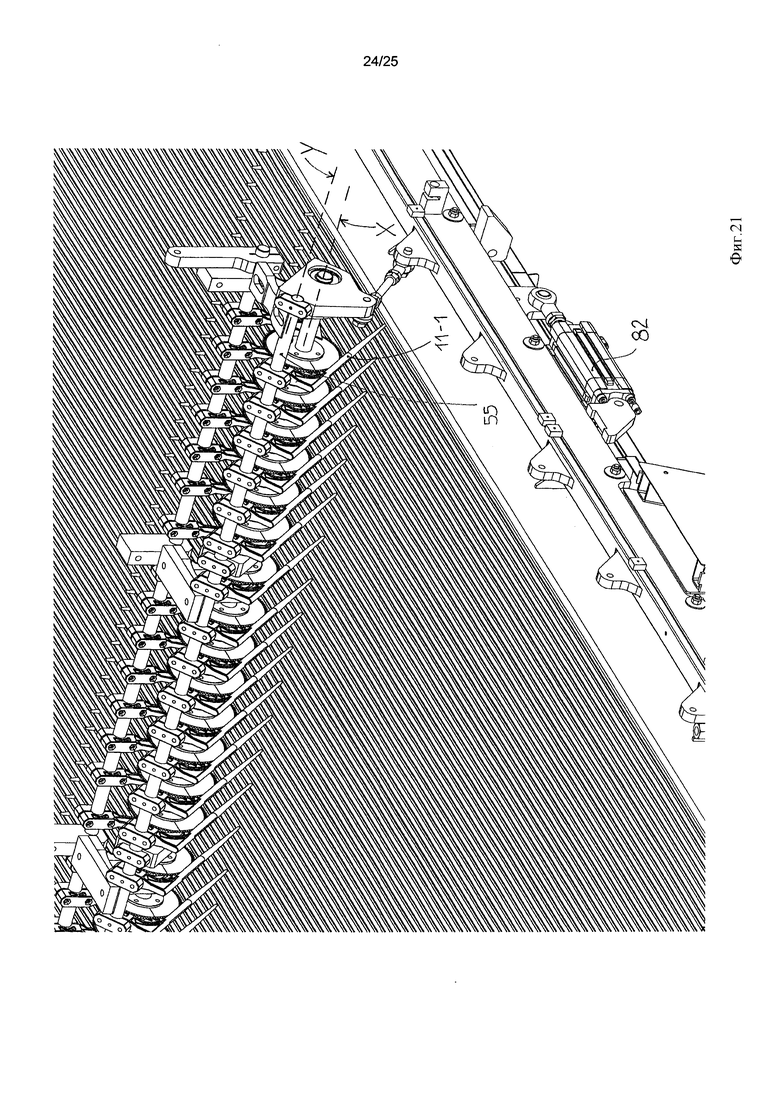
на Фиг. 21 показан вид в перспективе части устройства, на котором ее состояние в целом соответствует состоянию этой части устройства, изображенному на Фиг. 19;
на Фиг. 22 показан вид в перспективе части устройства, на котором ее состояние в целом соответствует состоянию этой части устройства, изображенному на Фиг. 20.
[0013] Как показано на фигурах, устройство для резки плодоножек кистей продуктов растениеводства, в частности вишен, в целом содержит:
- опорную конструкцию с рамой, содержащей два параллельных горизонтальных боковых элемента 1А, 1B, которые определяют между собой по существу плоскую поверхность S, в большинстве случаев прямоугольную; упомянутая поверхность S представляет собой только геометрическое определение, и не обозначает никаких материальных элементов, что станет понятным из дальнейшего описания;
- множество режущих модулей 2A, 2B, 2С, 2D, 2E, …, которые по существу идентичны один другому, и каждый из них содержит обычный вращающийся вал 32A, 32B, 32C, 32D, 32E, …; упомянутые вращающиеся валы параллельны один другому и расположены выше упомянутой поверхности S, и поэтому расположены один за другим, чтобы обеспечить возможность захвата практически всех кистей продуктов, перемещаемых расположенным снизу столом.
[0014] Упомянутые режущие модули идентичны, и поэтому для упрощения далее описан только один из них, например, модуль 2С (показанный на Фиг. 2). Разумеется, соответствующие пояснения распространяются на все остальные модули.
Для упрощения описания и производства упомянутое устройство является в целом симметричным относительно вертикальной плоскости "Р" (см. Фиг. 8 и, схематически, также Фиг. 3), перпендикулярным упомянутым вращающимся валам 32А, 32B, 32C, …, и простирающимся через срединную линию упомянутой поверхности S относительно упомянутых пар неподвижных противолежащих боковых элементов 1A, 1B.
[0015] Описание в целом и формула изобретения иногда ссылаются на одиночный элемент, а иногда на несколько аналогичных элементов; поскольку упомянутые режущие модули по существу аналогичны один другому, и поскольку каждый режущий модуль содержит множество вращающихся режущих элементов и соответствующих связанных элементов, в частности, соответствующих наклонных направляющих и элементов, пригодных для изменения их положения, которые являются подобными или идентичными, понятно, что ссылка на один из таких модулей или на один из упомянутых элементов или режущих элементов без исключений и явно распространяется на все другие модули и другие элементы или режущие элементы, что четко показано на прилагаемых фигурах.
[0016] Упомянутые вращающиеся валы расположены выше средств транспортировки, которые закрывают упомянутую поверхность S и которые пригодны для перемещения продуктов, помещенных на них, в направлении к упомянутым вращающимся режущим элементам.
Упомянутый модуль 2С содержит:
- множество вращающихся режущих элементов 11, 12, 13, 14, установленных в фиксированных местоположениях по его длине;
- множество позиционирующих наклонных направляющих 11-1, 12-1, 13-1, 14-1, каждая из которых установлена в местоположении, которое соответствует конкретному вращающемуся режущему элементу;
- упомянутые наклонные направляющие, имеющие продолговатую форму в направлении движения упомянутых средств транспортировки, значительно уплощены и вертикально ориентированы;
- соответствующая верхняя кромка упомянутых наклонных направляющих ориентирована по нисходящей линии в направлении к упомянутым средствам транспортировки с таким наклоном, что высота упомянутых кромок увеличивается в направлении соответствующих режущих элементов, расположенных выше упомянутых средств транспортировки;
- так что кисти продуктов, помещенные на упомянутые средства транспортировки, перемещаются в направлении к упомянутым наклонным направляющим, верхняя кромка которых, соответственно 11-2, 12-2, 13-2, … (Фиг. 10), установлена под острым углом и определяет точку соприкосновения плодоножек каждой кисти, которая захвачена соответствующим режущим элементом.
[0017] Что касается упомянутой Фиг. 10, то следует понимать, что эта Фиг. 10 является представлением в вертикальной и боковой плоскости, и упомянутые верхние кромки 12-2, 13-2, … не показаны явно по той очевидной причине, что они закрыты, и, следовательно, скрыты видимой первой верхней кромкой 11-2.
Точнее говоря, каждая наклонная направляющая выровнена относительно соответствующего режущего элемента и расположена в его нижней зоне; для обеспечения перемещения кистей продуктов по наклонной направляющей в направлении к соответствующему режущему элементу упомянутая наклонная направляющая имеет в своей верхней части соответствующий паз 11-3, 12-3, 13-3, 14-3, размер которого подходит для размещения соответствующего режущего элемента 11, 12, 13, 14, … Таким образом, кисти продуктов растениеводства транспортируются по направлению к упомянутым наклонным направляющим, каждая из которых за один раз преграждает путь одной кисти и поднимает соответствующую плодоножку, которая охватывает с двух сторон наклонную направляющую и при продолжении своего перемещения захватывается соответствующим режущим элементом и перерезается в соответствующей точке на соответствующей кромке.
Как обязательный элемент для функционирования изобретения, упомянутая транспортировка и движение упомянутых средств транспортировки осуществляется так, как описано ниже.
[0018] Как показано на Фиг. 9, упомянутые средства транспортировки включают в себя стол, образованный множеством параллельных пазов 20, 21, 22, 23, 24, 25, …, расположенных горизонтально и по существу перпендикулярно упомянутым вращающимся валам.
Упомянутые пазы отделены один от другого соответствующими выдающимися над поверхностью частями 20-А, 21-А, 22-А, …; совокупность из упомянутых пазов и соответствующих выдающихся над поверхностью частей в целом образована непрерывно движущейся конвейерной лентой.
[0019] Эта лента перемещается в направлении, параллельном упомянутым пазам 20, 21, 22, 23, 24, 25 и соответствующим выдающимся над поверхностью частям, и, соответственно, перемещается перпендикулярно упомянутым вращающимся валам.
Кроме того, каждая наклонная направляющая расположена над соответствующим пазом, и при этом наклонена и ориентирована относительно последнего так, что проекция каждой из упомянутых наклонных направляющих относительно соответствующего паза выровнена относительно того же паза; в частности, местоположение тонкого конца 11-Р, 12-Р, 13-Р, 14-Р, … (см. Фиг. 2) упомянутых наклонных направляющих устанавливают на оптимальной высоте H1 от верхней поверхности соответствующего паза, как показано на Фиг. 10.
[0020] Поскольку на практике большинство продуктов растениеводства, в частности, вишен, которые соединены в одну кисть, оказываются внутри одного и того же паза, понятно, что операция перерезания плодоножек является более эффективной и продуктивной, если режущие элементы, а, следовательно, и соответствующие наклонные направляющие, отцентрированы и выровнены по оси внутри соответствующих упомянутых пазов.
Фактически, выполнение задачи перерезания по существу всех плодоножек основано на факте наличия не исключительно одного режущего модуля, а множества режущих модулей 2А, 2B, 2С, расположенных один за другим, один далее по направлению движения относительно другого, относительно направления перемещения стола, образованного упомянутыми пазами, разделенными соответствующими выдающимися над поверхностью частями.
[0021] Работа раскрытого в этом описании устройства осуществляется следующим образом: различные кисти помещают и распределяют известными средствами и способами на упомянутом столе, образованном различными пазами 20, 21, 22, 23, 24, 25, … и соответствующими выдающимися над поверхностью частями 20-А, 20-В, 20-С, 20-D, …
При перемещении упомянутого конвейера в направлении к упомянутым наклонным направляющим и вращающимся режущим элементам продукты достигают места расположения упомянутых наклонных направляющих, и вследствие тянущего перемещения, которому подвергаются упомянутые плодоножки, подхватываются соответствующими наклонными направляющими, и таким образом естественно захватываются и поднимаются воздействием этого тянущего перемещения до места, где они касаются соответствующего вращающегося режущего элемента, который перерезает их точно у верхней кромки соответствующей наклонной направляющей.
[0022] Таким образом достигнута первая цель изобретения, которая состоит в перемещении различных кистей на позицию резания, не подвергая их вибрациям, встряхиванию и тому подобным воздействиям, которые, разумеется, могут повредить их.
Однако, как уже упомянуто, ситуация, описанная выше, приводит к оптимальным результатам только если расстояние верхней кромки наклонной направляющей от дна примыкающего паза по существу соответствует высоте плодоножки, или, более точно, длине плодоножки, так что, принимая во внимание также размер плода, сам по себе узел плодоножек располагается точно или почти точно на высоте верхней кромки наклонной направляющей.
[0023] На практике, если данное условие не выполняется, и если, например, плодоножка длиннее, то может случиться, что наклонная направляющая не захватит и не поднимет узловую связку, поскольку эта узловая связка естественно располагается на самой наклонной направляющей; в этой ситуации вращающийся элемент дотрагивается до плодоножки, и затем перерезает ее в месте, далеком от узловой связки, что может не приносить желаемого результата и быть совершенно нежелательным.
[0024] Другой существенный недостаток, обнаруженный в подобных устройствах, уже имеющихся и эксплуатируемых в торговле, состоит в том, что хотя они и содержат множество режущих модулей, каждый из которых в принципе практически аналогичен режущим модулям 2А, 2B, 2С, 2D, 2Е, … по настоящему изобретению, однако для этих устройств, при необходимости изменения высоты или наклона наклонных направляющих, также необходимо осуществить действия:
- не только с одним за другим механизмами/средствами, которые регулируют высоту каждого из упомянутых режущих модулей, то есть высоту соответствующего вращающегося вала над упомянутым столом,
- но также регулировать средства, которые изменяют наклон наклонных направляющих относительно каждого вращающегося вала соответствующего режущего модуля.
[0025] Несмотря на то, что данная операция является простой и легкой, она все же требует чрезвычайно большого расхода времени с точки зрения продуктивности, поскольку требует прерывания обработки продуктов и вмешательства вручную последовательно на каждом режущем модуле.
[0026] С экономической точки зрения данная ситуация является неприемлемой как из-за того, что вызывает вынужденную остановку машины, которая может составлять до нескольких часов, что недопустимо при необходимости обрабатывания свежей, нежной и ценной продукции за очень короткое время, так и вследствие расходов на техническое обслуживание и затрат рабочего времени, которое должно быть затрачено на выполнение работ по регулировке одного за другим положения отдельных режущих модулей.
[0027] Изложенная далее идея усовершенствований для преодоления этих существенных недостатков представляет собой вариант осуществления таких средств, которые обеспечивают возможность регулирования по необходимости высоты наклонной направляющей над расположенным под ней столом (пазы и выдающиеся над поверхностью части), и одновременно также регулирования высоты соответствующего вращающегося вала так, что взаимное расположение вала, и соответственно упомянутых соответствующих вращающихся режущих элементов, и соответствующих наклонных направляющих остается по существу постоянным или почти таким с использованием таких способов и средств, которые обеспечивают возможность одновременного автоматического регулирования высоты всех режущих модулей за одну операцию, так что все режущие модули настраиваются на новые рабочие условия.
[0028] Понятно, что такие средства и способы работы обеспечивают значительное уменьшение времени, которое ранее требовалось для регулирования этого устройства; это настолько несомненно, что не будет обсуждаться далее.
С этой целью предложена показанная на фигурах подвижная конструкция:
- имеющая по существу геометрическую форму, подобную геометрической форме упомянутой опорной конструкции 1А, 1B, и содержащая два параллельных горизонтальных боковых элемента 5-А, 5-В (Фиг. 1, Фиг. 2 и Фиг. 3),
- расположенная выше упомянутой опорной конструкции;
- упомянутая подвижная конструкция соединена с упомянутой неподвижной конструкцией посредством множества подвижных рычагов, наиболее предпочтительно при помощи только четырех рычагов 6, 7, 8, 9 (Фиг. 1);
- каждый из которых соединен (Фиг. 2А) одним из своих концов 6А с некоторой точкой на упомянутом боковом элементе 1А, а соответствующим другим концом 6B с некоторой соответственной точкой на боковом элементе 5-А, принадлежащем упомянутой подвижной конструкции, причем упомянутые концы 6А, 6B, принадлежащие конкретному рычагу 6, расположены на различных вертикальных прямых линиях r, t.
[0029] Таким образом, при повторении такой конструкции с идентичными размерами для обоих боковых элементов, как упомянутой подвижной конструкции, так и упомянутой неподвижной конструкции, образуется конструкция, показанная на Фиг. 1.
На практике, каждый нижний боковой элемент неподвижной конструкции соединен с расположенным выше него боковым элементом подвижной конструкции посредством двух аналогичных пар отдельных рычагов 6, 7, и 8, 9.
[0030] Таким образом создана конструкция "параллелограммного" типа, так что упомянутая подвижная конструкция становится пригодной для перемещения относительно упомянутой неподвижной конструкции движением, которое будет определено далее как "поступательное перемещение по круговой траектории".
[0031] На практике подвижная конструкция поворачивается вокруг определенных точек неподвижной конструкции благодаря своему шарнирному соединению с упомянутыми рычагами 6, 7, 8 и 9, а также благодаря «ромбовидной» конструкции, которая образована:
- двумя рычагами 6, 7, расположенными по существу в одной вертикальной плоскости между парой из неподвижного и подвижного боковых элементов 1А и 5-А;
- и частями тех же боковых элементов, расположенными:
- между точками шарнирного закрепления 6А, 7А, расположенными на боковом элементе 1А, и аналогично между точками шарнирного закрепления 6В, 7В (показанными на Фиг. 11) относительно бокового элемента 5-А.
[0032] На Фиг. 11 четко показано геометрическое расположение элементов, описанных выше, только в отношении боковых элементов 1А и 5-А.
Изобретатели исходили из того, что изложенное выше в отношении боковых элементов 1А и 5-А полностью аналогичным образом относится и к боковым элементам 1B и 5-В, расположенным на другой стороне той же опорной конструкции.
Следует учитывать, что, как уже было упомянуто выше, для упрощения описания и производства упомянутое устройство является в целом симметричным относительно вертикальной плоскости "Р" (см. Фиг. 8 и, схематически, также Фиг. 3), перпендикулярной к упомянутым вращающимся валам 32A, 32B, 32С, …, и проходящей через срединную линию упомянутой поверхности S относительно упомянутых пар неподвижных противолежащих боковых элементов 1A, 1B.
[0033] Если верхняя конструкция, содержащая боковые элементы 5-А и 5-В, поднимается (при помощи известных средств, которые не входят в объем изобретения), то, как схематически показано на Фиг. 11, упомянутые аналогичные верхние боковые элементы 5А и 5B являются перемещаемыми поступательным движением, поскольку они всегда параллельны один другому, а также и вращательным движением, поскольку подвижные рычаги остаются шарнирно закрепленными в соответствующих точках на неподвижной нижней конструкции.
Тем самым мы разъяснили значение понятия «поступательное перемещение по круговой траектории», приведенного выше.
К тому же это является характерным движением любой конструкции в форме параллелограмма.
[0034] Короче говоря, в показанной конструкции возможен подъем подвижной конструкции относительно неподвижной конструкции, в частности, боковых элементов 5-А, 5-В, поступательным перемещением по круговой траектории.
Кроме того, упомянутые наклонные направляющие соединены с двумя верхними боковыми элементами 5-А и 5-В верхней подвижной конструкции так, что ее подъем также автоматически вызывает частичный подъем соответствующих наклонных направляющих, однако без увеличения или уменьшения отдаленности в вертикальном направлении соответствующих точек от расположенного снизу паза, хотя возможно изменение положения тех же точек в горизонтальной плоскости.
[0035] Способ выполнения этого соединения разъяснен ниже.
Разумеется, необходимо, чтобы поднимание или опускание наклонных направляющих не вызывало никаких проблем с соответствующими режущими элементами, которые не должны создавать помех самим наклонным направляющим, и в любом случае должны учитываться геометрическая форма и расстояние одной от другой наклонной направляющей и соответствующего режущего элемента.
В результате оси X вращающихся валов также должны быть выполнены как единое целое с упомянутыми боковыми элементами в том толковании, которое разъяснено перед этим.
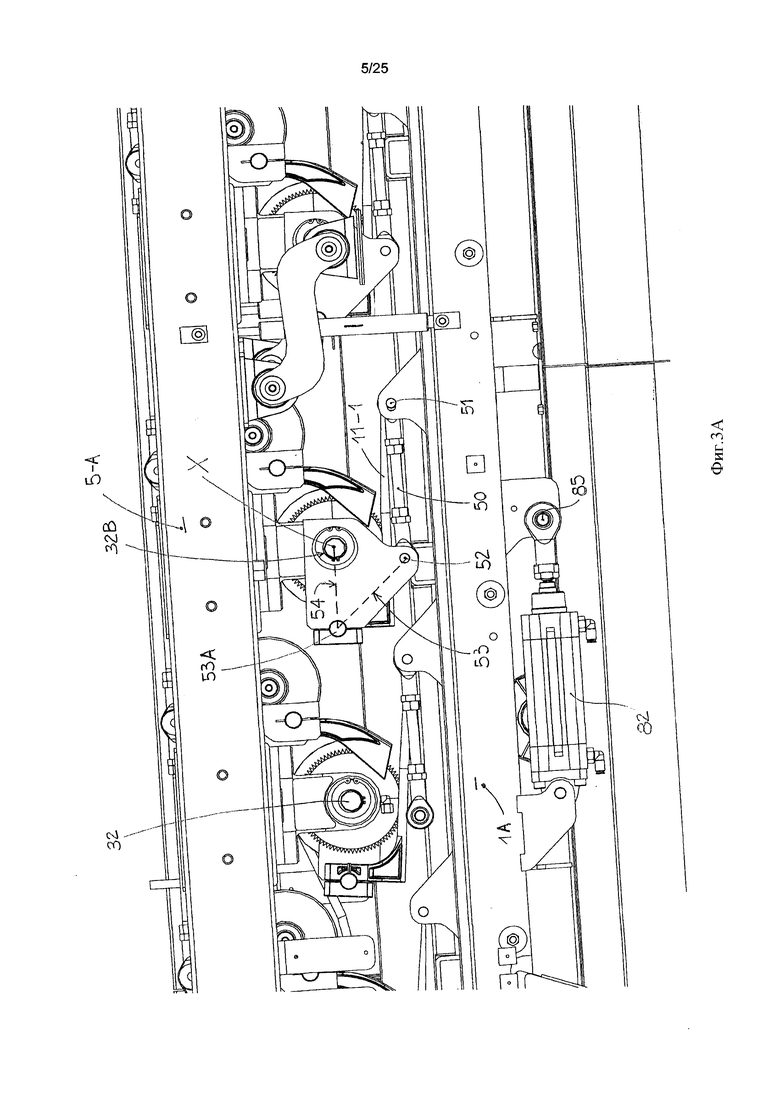
Для этого, как показано на Фиг. 2А, Фиг. 3A и Фиг. 4A, упомянутые валы 32A, 32B, 32C, 32D, 32E, … установлены на двух верхних боковых элементах 5-А и 5-В при помощи известных соединительных средств, в данном случае (Фиг. 6, Фиг. 7, Фиг. 7А) выполненных в виде двух кронштейнов 40, 41 для вала 32С.
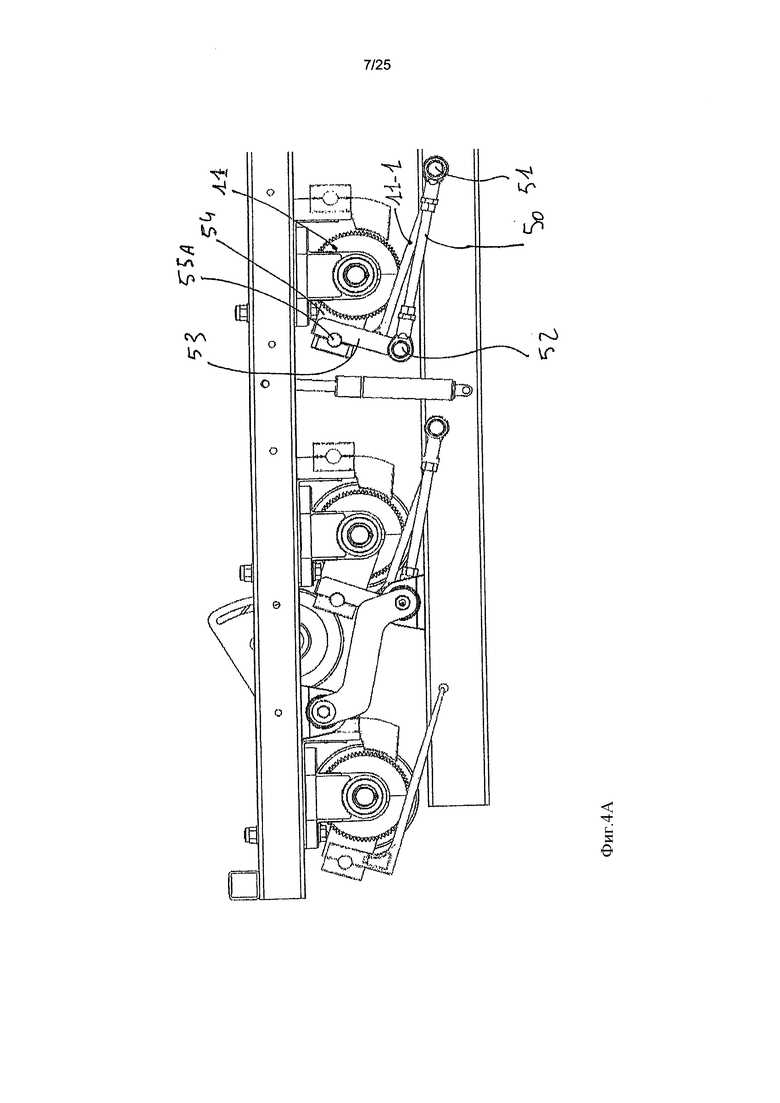
[0036] Что касается закрепления наклонных направляющих относительно этого режущего модуля и упомянутого вала 32С, то для этого предусмотрены механические соединительные средства, которые содержат для каждого режущего модуля соединительную тягу 50, шарнирно закрепленную одним концом 51 в неподвижной точке упомянутой опорной конструкции, фактически на нижнем боковом элементе 1А, а другим концом 52 на первом механическом соединительном элементе 53, закрепленном на вспомогательном вале 55, который в свою очередь прикреплен к одному или более второму(-ым) механическому(-им) соединительному(-ым) элементу(-ам) 54 (показаны, в частности, на Фиг. 7 и Фиг. 7А), соединенному(-ым) с соответствующим вращающимся валом 32С так, как описано далее.
[0037] Как будет объяснено подробнее ниже, положение упомянутой опорной конструкции, на которой закреплен упомянутый конец 51, может быть либо неподвижным, либо подвижным; однако эти различные варианты расположения и обоснования для них подробно раскрыты ниже.
Как показано на Фиг. 2А, Фиг. 4А и Фиг. 7А, упомянутый вспомогательный вал 55 представляет собой невращающийся вал, расположенный параллельно соответствующему вращающемуся валу 32С и введенный во взаимодействие вблизи одного конца 55А с первым механическим соединительным элементом 53.
[0038] Второй механический соединительный элемент 54 введен во взаимодействие у одного из его концов 54А с упомянутым валом 55, а у другого конца 54B с упомянутым вращающимся валом 32С способом, который будет описан далее.
Кроме того, на этом же вспомогательном валу 55 как единое целое с ним закреплено множество рычагов 56А, 56В, 56С, 56D, …, все из которых поддерживают соответствующие наклонные направляющие 11-1, 12-1, 13-1, 14-1, … у одного из их соответствующих нижних концов.
[0039] Будет понятно, что упомянутые соединительные средства, соединяющие упомянутый вспомогательный вал 55 с упомянутыми механическими соединительными элементами 53 и 54, а также с упомянутыми рычагами 56A, 56B, 56C, 56D, …, выполнены так, что вал 55 не может вращаться вокруг своей собственной оси относительно упомянутых соединительных элементов и наклонных направляющих, так что в конце концов соединительные средства упомянутых видов проходят в сквозные отверстия, выполненные в упомянутых соединительных элементах 53 и 54 и рычагах 56А, 56 В, 56С, 56D, …, и в этих сквозных отверстиях установлен упомянутый вспомогательный вал 55, который, однако, не может вращаться относительно них.
[0040] И наконец, соединение упомянутого второго соединительного элемента 54 с упомянутым концом 54B на вращающемся валу 32С представляет собой вращательное соединение, в том смысле, что упомянутый вал 32С проходит через соответствующее сквозное отверстие упомянутого конца 54B упомянутого второго соединительного элемента 54, и тем не менее он может вращаться вокруг своей собственной оси, и таким образом упомянутое сквозное отверстие в упомянутом конце 54 В работает как средство, которое поддерживает только определенное геометрическое положение между самим соединительным элементом 54 и осью вращения вала 32С, однако безусловно не между этим соединительным элементом 54 и валом 32С.
Соответственно упомянутый второй соединительный элемент 54 может вращаться, однако только в определенных пределах, как показано далее, вокруг своего соответствующего вала 32С.
[0041] При указанной конфигурации элементов и используемых упомянутых соединительных средств из сравнения между собой трех фигур (Фиг. 2А, Фиг. 3А и Фиг. 4А), на которых показан верхний боковой элемент 5-А в двух крайних положениях минимальной отдаленности и максимальной отдаленности, а также в некотором промежуточном положении, следует, что если верхние боковые элементы 5-А и 5-В поднимаются, то соответствующие вращающиеся валы 32-А, 32-В, 32-С также автоматически поднимаются, причем последний также тянет вверх второй соединительный элемент 54, который подает вверх соответствующий вспомогательный вал 55, который, в свою очередь, тянет вверх соответствующие рычаги 56А, 56B, 56С, …, которые в конечном итоге также подают вверх соответствующие наклонные направляющие.
Однако по причине того, что упомянутый вал 55 не свободен, а соединен своим концом 55А с первым соединительным элементом 53, соединенным с упомянутой соединительной тягой 50, которая, в свою очередь, соединена с нижним боковым элементом в точке шарнирного соединения 51, упомянутые механические соединительные элементы, а тем самым и упомянутая наклонная направляющая, не только поднимаются, но и поворачиваются.
[0042] Не вдаваясь в сложные и не обязательные геометрические выкладки, достаточно отметить, что упомянутые наклонные направляющие, упомянутые механические соединительные элементы, упомянутые подвижные рычаги, их точки присоединения к соответствующим конструкциям, упомянутые соединительные рычаги должны иметь размеры, положение и соединение одного с другим такие, чтобы подъем упомянутой подвижной конструкции, представленной верхними боковыми элементами 5-А и 5-В, относительно упомянутой неподвижной конструкции, вызывал поступательно-вращательное перемещение, которое, разумеется, сопровождается эквивалентным перемещением осей соответствующих вращающихся валов, поскольку последние соединены с упомянутой верхней подвижной конструкцией, содержащей упомянутые боковые элементы 5-А и 5-В, прикрепленные упомянутыми кронштейнами 40, 41.
[0043] Поступательно-вращательное перемещение упомянутых вращающихся валов 32-С вызывает подъем соответствующих вторых соединительных элементов 54, которые тянут упомянутый вспомогательный вал 55, а также рычаги 56-А, 56B, 56-С, …, так что тонкие концы соответствующих наклонных направляющих, присоединенных к упомянутым рычагам, сохраняют по существу одну и ту же высоту H1 разъединения относительно соответствующего паза, пока отклонение упомянутых наклонных направляющих изменяется при упомянутом поступательном перемещении по круговой траектории (см. Фиг. 11).
[0044] Специалист в этой области техники в полной мере способен представить себе и определить необходимые размеры. Только для ясности изложения на Фиг. 12 показан очень упрощенный схематический вид упомянутых соединительных средств, описанных в двух состояниях: минимального и максимального расстояния между боковыми элементами двух конструкций - неподвижной и подвижной.
[0045] В частности, на упомянутой схеме показаны:
- верхний боковой элемент 5-А в двух упомянутых положениях;
- ось X вращающегося вала в двух соответствующих положениях;
- механические соединительные элементы 53, 54 в двух соответствующих положениях, в которых положение максимальной отдаленности, определенное выше, обозначено как 53, 53А и 54, 54А, соответственно;
- соединительная тяга 50 в двух соответствующих положениях 50 и 50А;
- и, наконец, соответствующая наклонная направляющая, которая для большей наглядности показана в двух соответствующих положениях 71 и 72.
Поскольку желательно, чтобы тонкий конец 11-Р наклонной направляющей 71-72 сохранял постоянную определенную высоту H1 относительно расположенного снизу паза, то будет достаточно придать соответствующие размеры средствам, используемым для достижения такого состояния.
[0046] Работа усовершенствованного устройства, описанного выше, осуществляется следующим образом: когда необходимо изменить высоту наклонных направляющих, верхнюю подвижную конструкцию поднимают относительно неподвижной конструкции известными средствами обычного типа.
В результате такого подъема упомянутая подвижная конструкция перемещается вверх, но движением "параллелограммного" вида, как описано выше.
Упомянутое перемещение верхней конструкции, из-за наличия упомянутых кронштейнов 40, 41, также вызывает перемещение соответствующего вращающегося вала 32С, который в свою очередь перемещает механические соединительные элементы 54, 53 и вспомогательный вал 55, расположенный между ними.
[0047] Поскольку первый соединительный элемент 53 через ось 52 присоединен к соединительной тяге 50, которая в свою очередь шарнирно присоединена другим концом 51 к неподвижной нижней конструкции, это приводит к тому, что воздействие этих механических соединений в сочетании с подъемом верхней конструкции (боковые элементы 5-А и 5-В) вызывает подъем тяги 50.
[0048] Сравнение положений описанных выше средств, как показано на Фиг. 2A, Фиг. 3A, Фиг. 4A, где на Фиг. 2A и Фиг. 4A показаны два конечных положения, которые могут быть достигнуты верхней подвижной конструкцией, показывает, что подъем верхней подвижной конструкции вызывает подъем соединительной тяги 50, а поскольку она соединена с осью 51, упомянутый подъем соответствующего конца 52 вызывает поворот по часовой стрелке самой тяги 50, и тем самым, через упомянутые соединения элементов 53, 54 с валом 55, также поворот рычага 46-А, 46-В, 46-С, … и соответствующей наклонной направляющей 11-1.
[0049] Однако поскольку перемещение упомянутой наклонной направляющей 11-1 представляет собой сложное движение, в результате сложения перемещения верхней подвижной конструкции "параллелограммного" типа и вращательного перемещения механических соединительных элементов 53, 54, а также вспомогательного вала 55 относительно вала 32-С, который в свою очередь соединен с верхней подвижной конструкцией, результатом воздействия на наклонную направляющую 11-1 является ее поворот по часовой стрелке, который при соответствующих размерах взаимодействующих средств может вызывать увеличение наклона направляющей (как показано на Фиг. 12) из одного положения 71 в другое положение 72.
[0050] Также понятно, что Фиг. 3A, Фиг. 4A, несмотря на то, что на них показаны только три режущих модуля, которые содержат три вращающихся вала 32А, 32B и 32С, также применимы ко всем другим режущим модулям, не показанным на упомянутых фигурах, поскольку все режущие модули соединены с упомянутой верхней конструкцией одинаково, разумеется, за исключением их положения относительно последней.
[0051] Все упомянутые взаимодействующие средства могут поэтому обеспечивать то, что при простой геометрической форме упомянутая наклонная направляющая и, вследствие этого, в частности, ее верхняя кромка, наклонена для того, чтобы увеличивать высоту, таким образом обеспечивая возможность обработки кистей, имеющих плодоножки различной длины, без нежелательных результатов:
- для взаимного расположения наклонной направляющей и соответствующего вращающегося вала, а тем самым и соответствующего режущего элемента;
- а также для высоты тонкого конца самой наклонной направляющей на соответствующей выдающейся над поверхностью части, которую охватывают с двух сторон подаваемые кисти продуктов, которые захватываются, поднимаются и в конечном счете разрезаются соответствующим режущим элементом.
[0052] Таким образом, основная цель изобретения достигнута просто и эффективно: поскольку все режущие модули присоединены к двум боковым элементам 5-А и 5-В и опираются на них, то на практике при использовании средств и способов, описанных выше, путем выполнения одной простой операции возможна регулировка всех режущих модулей, каждый из которых соединен с соответствующими режущими элементами, а также с соответствующими наклонными направляющими. На практике достаточно подъема или опускания подвижной конструкции путем выполнения одной операции, и тем самым в соответствии с настоящим изобретением также двух боковых элементов 5-А и 5-В, которые являются ее частью, для достижения основной цели настоящего изобретения - обеспечения возможности регулирования наклона не только всех наклонных направляющих всех режущих модулей, опирающихся на упомянутую подвижную конструкцию, но также и всех вращающихся валов и соответствующих режущих элементов путем выполнения одной операции.
[0053] Специалисту в этой области техники будет понятно, что устройства и способы подъема/опускания упомянутой подвижной конструкции, а также соответствующее управление упомянутой подвижной конструкцией относятся к области знаний упомянутого специалиста, поэтому они подробнее не будут описаны.
В конце концов, как показано на Фиг. 7А и Фиг. 10, оказалось полезным и обеспечивающим определенные преимущества то, что каждая из упомянутых наклонных направляющих 11-1, 12-1, 13-1, … имеет на соответствующей верхней кромке 11-2, 12-2, 13-2, … соответствующий паз 11-3, 12-3, 13-3, пригодный для размещения в нем нижней кромки соответствующего вращающегося режущего элемента 11, 12, 13, …
[0054] На практике эта особенность обеспечивает возможность образования между самим режущим элементом и соответствующей верхней кромкой соответствующей наклонной направляющей соответствующего острого угла, внутрь которого подлежащая перерезанию плодоножка автоматически вводится и проталкивается так, что упомянутая плодоножка не может выскользнуть из-под режущего элемента, и так, что (см. Фиг. 10) угол резания t между радиусом R (соединяющим ось X вращающегося вала и точку С воображаемого пересечения линии резания режущего элемента 11 с профилем соответствующей верхней кромки 11-2 соответствующей наклонной направляющей 11-1) и профилем соответствующей верхней кромки 11-2 соответствующей наклонной направляющей 11-1 является достаточно большим и в любом случае превышающим 90°.
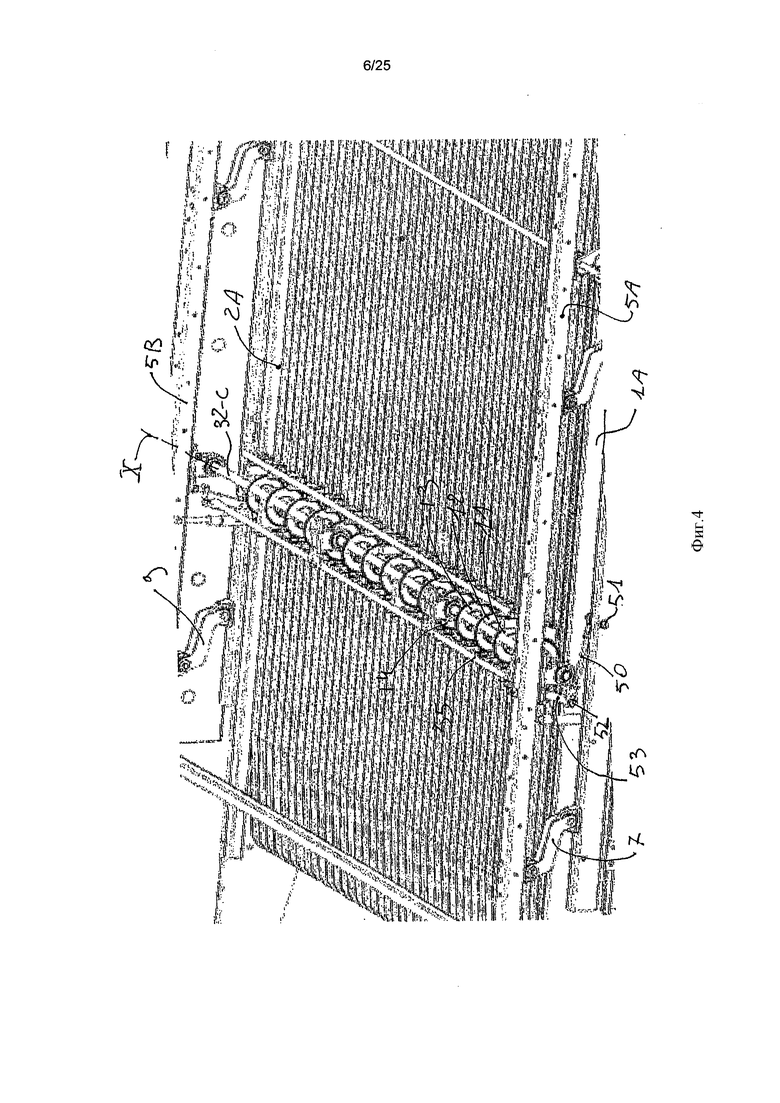
[0055] Для того, чтобы преодолеть проблему, описанную во введении к настоящему описанию, т.е. необходимость устранения всех препятствий от поверхности подвижного стола, решение, принятое для предотвращения препятствования описанных выше средств движению вишен, транспортируемых упомянутым столом 100 путем его поступательного перемещения, заключается в частичном подъеме как упомянутых наклонных направляющих, так и соответствующих вращающихся режущих элементов, так что последние перемещаются в направлении от подвижного стола 100 и размещаются на такой высоте выше него, что они больше не представляют собой препятствие для объектов, в частности, пучков вишен, которые транспортируются упомянутым подвижным столом.
[0056] В частности, как показано на Фиг. 13, Фиг. 14, Фиг. 15 и Фиг. 19-22, предусмотрены определенные механические средства перемещения, соединенные с основным устройством и шарнирно соединенные так, чтобы модифицировать и усовершенствовать его, так что их воздействие и работа вызывают вращение упомянутого вспомогательного вала 55 вокруг его центра вращения, соответствующего оси X, так что упомянутые верхние кромки 11-2, 12-2, 13-2, … и соответствующие тонкие концы 11-Р, 12-Р, 13-Р, 14-Р, … соответствующих упомянутых наклонных направляющих 11-1, 12-1, 13-1, 14-1, … поворачиваются на заранее определенный угол Δ, чтобы вызвать поворотный подъем упомянутых наклонных направляющих.
[0057] Разумеется, упомянутый стол может сохранить свои первоначальные особенности, поскольку настоящее изобретение привносит в известное устройство исключительно прогрессивное усовершенствование, и, следовательно, упомянутый стол 100 по-прежнему содержит множество параллельных пазов 20, 21, 22, 23, …, расположенных по существу перпендикулярно упомянутым вращающимся валам 32А, 32B, 32С, …, упомянутые пазы отделены один от другого соответствующими выдающимися над поверхностью частями 20-А, 21-А, 22-А, 23-А, …, при этом упомянутый стол перемещается в направлении, параллельном упомянутым пазам, и, следовательно, перпендикулярно упомянутым вращающимся валам 32А, 32B, 32С, …, и при этом упомянутые наклонные направляющие расположены так, чтобы соответствовать упомянутым соответствующим пазам, и проекция каждой из упомянутых наклонных направляющих относительно соответствующего паза выровнена относительно того же паза.
[0058] Для создания материального воплощения этого решения на прилагаемых фигурах, в частности, на Фиг. 13 и Фиг. 14, показано геометрическое и схематическое представление способа работы этого изобретения; тем не менее, несмотря на то, что упомянутые фигуры являются исключительно схематическими, они в полной мере пригодны и достаточны для объяснения логики и способа работы настоящего изобретения.
Устройство по настоящему изобретению изображено на Фиг. 13, на которой показан вид сбоку в вертикальном разрезе, идентичный виду, показанному на Фиг. 12.
Соответственно показан неподвижный горизонтальный боковой элемент 1А, к которому прикреплена упомянутая шарнирная тяга 50; нижний конец 51 этой тяги шарнирно присоединен к упомянутому боковому элементу 1А, как уже было описано выше.
[0059] В нормальных рабочих условиях, т.е. с наклонными направляющими, расположенными под своим обычным наклоном над столом 100, имеет место показанное на Фиг.13 положение первого механического соединительного элемента 53, шарнирно прикрепленного к упомянутой шарнирной соединительной тяге 50 своим нижним концом 52; как описано выше, упомянутый вспомогательный вал 55, находящийся внутри соответствующего отверстия, для поворачивания введен во взаимодействие со вторым механическим соединительным элементом 54, который, в свою очередь, своим противоположным концом опирается на вращающийся вал 32-С, который рассматривается в настоящем объяснении.
[0060] Основным аспектом настоящего изобретения является то, что соединение:
- упомянутого нижнего конца 52 первого механического соединительного элемента 53,
- и соответствующего конца упомянутой шарнирной соединительной тяги 50, выполнено как свободно вращающееся шарнирное соединение; это позволяет упомянутому первому механическому соединительному элементу 53 иметь возможность поворачивания относительно упомянутой шарнирной соединительной тяги 50.
Теперь обратимся к Фиг. 14; она представляет собой точно такое же изображение, какое показано на предыдущей Фиг. 13, за исключением того, что на упомянутое первое изображение было наложено второе изображение, соответствующее тому же первому изображению, на котором, однако, положение упомянутого конца 51 было смещено вправо в новое положение 51, соответственно, в направлении, противоположном направлению движения упомянутого стола 100.
[0061] Результатом этого смещения является то, что:
- упомянутая шарнирная соединительная тяга 50 перемещается в новое положение 50А,
- упомянутый первый механический соединительный элемент 53 перемещается в новое положение 53А; это обусловлено тем, что он должен вращаться вокруг своей геометрической оси Y, которая при этом, как в большой степени демонстрируется сравнением Фиг. 13 и Фиг. 14, а также сравнением Фиг. 19 и Фиг. 20, должна вращаться вокруг оси X, пространственное положение которой, с другой стороны, остается неизменным (см. Фиг. 13 и Фиг. 14);
- упомянутый первый механический соединительный элемент по существу может перемещаться только как рычаг, выступающий из упомянутого вспомогательного вала 55;
- нижний конец 52 первого механического соединительного элемента 53 перемещается в новое положение 52А; это положение определяется точкой пересечения двух дуг окружности, при этом радиус первой из них определяется первым механическим соединительным элементом 53А с неподвижной осью на вспомогательном валу 55, и радиус второй из них определяется шарнирной соединительной тягой 50A с новой осью поворота в точке 51A.
[0062] Поскольку соединение между первым механическим соединительным элементом 53А и вторым механическим соединительным элементом 54А является жестким, и оба этих элемента введены во взаимодействие с тем же вспомогательным валом 55, то, как показано на Фиг. 14, неизбежно, если упомянутая шарнирная тяга перемещается влево, то упомянутый конец 52А упомянутого первого механического соединительного элемента 53А поворачивается в направлении против часовой стрелки на угол Δ, и, следовательно, также упомянутый второй механический соединительный элемент 54А поворачивается в том же направлении против часовой стрелки, результатом чего является перемещение в том же направлении и на тот же угол Δ как вращающегося вала 32-С, так и соответствующих режущих элементов и наклонных направляющих; на Фиг. 14 понятно показано, что новое положение 11-1(B), которое занимает соответствующая наклонная направляющая, ранее обозначенная как 11-1, было изменено, логически рассуждая, на тот же угол Δ, на который новое положение соединительного элемента 53А было изменено относительно исходного положения 53.
[0063] Несомненным, окончательным и желаемым результатом является подъем от стола 100 как упомянутого вращающегося вала, так и соответствующих режущих элементов и наклонных направляющих.
Следует отметить, как показано, в частности, на Фиг.14, что ось, первоначально обозначенная как Y, вокруг которой вращается вспомогательный вал 55, после приведения в действие устройства по настоящему изобретению и, следовательно, после вращательного подъема наклонных направляющих, перемещается в соответствующее положение Y1.
Для определения нового местоположения конца 52А, который "направляет" в целом перемещение, следует, разумеется, учитывать, что оно представляет собой пересечение двух окружностей, радиусами которых являются, соответственно, элементы 50 и 53, линейные размеры которых, несомненно, должны оставаться неизменными, поскольку они являются двумя материальными рычагами.
[0064] Разумеется, упомянутый угол Δ вращения узла, состоящего из элементов 53, 54, вала 32, соответствующих режущих элементов и наклонных направляющих, может представлять собой любой угол, величина которого пригодна для подъема упомянутых наклонных направляющих и соответствующих вращающихся режущих элементов на высоту, достаточную для удаления всех препятствий прохождению расположенного под ними пучка вишен; тем не менее, оптимальным решением является, разумеется, вращение упомянутого вспомогательного вала 55 вокруг его центра вращения, который соответствует оси "X", на такой угол, чтобы верхние кромки 11-2, 12-2, 13-2, и т.д., а также множество тонких концов 11-Р, 12-Р, 13-Р, 14-Р, … соответствующих наклонных направляющих 11-1, 12-1, 13-1, 14-1, … были расположены горизонтально, на максимальной удаленности от расположенного под ними стола 100; на Фиг.14 показано, для упрощения, что положение и направление наклонной направляющей 11-1 смещены до нового положения 11-1 (В), т.е. до по существу горизонтального положения, поскольку она становится параллельной столу 100, который был описан выше как горизонтальный стол.
[0065] С точки зрения конструкции настоящее изобретение может быть выполнено следующим образом:
как показано на Фиг.15, установлен горизонтальный ползун, или тяга, 60, перемещающийся(-аяся) скольжением в горизонтальном направлении вдоль геометрической оси Z, расположенной в одну линию с боковым элементом 1А; относительно последующего описания следует понимать, что все, что указано в отношении бокового элемента 1А, идентичным образом распространяется на конструкцию и узел параллельного бокового элемента 1В, учитывая фундаментальную симметрию устройства относительно вертикальной плоскости, срединной относительно упомянутых боковых элементов и параллельной направлению движения стола 100.
Упомянутый ползун 60 имеет в своей верхней части множество выступающих элементов 61, 62, 63, 64, …, которые простираются вверх и имеют в своих соответствующих верхних выступах соответствующие отверстия 61 А, 62А, 63А, 64А, …
[0066] Как показано на Фиг. 16, упомянутый ползун 60 вставляют и перемещают внутри паза 90, выполненного в специальной конструкции, размещенной рядом с боковым элементом 1А, … и простирающейся вдоль него, так что упомянутый ползун может перемещаться внутри упомянутого паза вдоль геометрической оси Z, которая является по существу горизонтальной и параллельной направлению движения стола 100, и, следовательно, получают описанную конструкцию, также расположенную в плоскости (не показана), по существу перпендикулярной упомянутым вращающимся валам 32-С, 32А, 32B …
Упомянутый боковой элемент 1А имеет по существу U-образную форму, и упомянутый ползун 60 расположен в соответствующем центральном пазу 90.
[0067] Как показано на Фиг. 15, Фиг. 16 и Фиг. 17, нижний рычаг 73 расположен в определенном положении на упомянутом ползуне 60 и выступает вниз от сквозного отверстия 80, выполненного на нижней стороне упомянутого бокового элемента 1А.
К нижнему концу упомянутого нижнего рычага 73 прикреплен конец 85 поршня привода 82, предпочтительно - пневматического цилиндра, корпус которого закреплен на соответствующей части соответствующего бокового элемента 1А.
После установки узла, состоящего из упомянутого ползуна 60 и соответствующих выступающих элементов и рычагов, в боковом элементе 1А, как показано на соответствующих фигурах, каждый нижний конец 51 соответствующей шарнирной тяги 50 закрепляют с возможностью вращения, т.е. шарнирно закрепляют в соответствующем отверстии 61A, 62A, 63A, 64A, …
[0068] На Фиг. 14 показано, что при приведении в действие упомянутый привод 82, прикладывая усилие к боковому элементу 1А, на котором он установлен, толкает упомянутый нижний рычаг 73 и, следовательно, всю тягу 60 с упомянутыми выступающими элементами 61, 62, 63, …, либо в прямом направлении, либо в противоположном - в любом случае, все так же вдоль упомянутой геометрической оси Z.
[0069] Как показано на фигуре, выступающий элемент 62, имеющий соответствующее верхнее отверстие 62А, в котором шарнирно закреплен упомянутый нижний конец 51 соответствующей шарнирной тяги 50, смещается в новое положение 62-N.
Понятно, что в упомянутом новом положении шарнирная тяга 50 остается шарнирно закрепленной в верхнем отверстии 62А того же выступающего элемента 62, и, следовательно, ее нижний конец перемещается в новое положение 51А, что в конечном итоге приводит к перемещению шарнирной тяги в новое положение 50А, уже описанное выше.
Кроме того, на Фиг. 19 и Фиг. 21 совершенно понятно проиллюстрировано, как в проекции на плоскость, так и в перспективе, рабочее состояние, в котором наклонные направляющие расположены под определенным наклоном, что соответствует их положению на Фиг. 13; и совершенно аналогичным способом на Фиг. 20 и Фиг. 22 совершенно понятно проиллюстрировано, как в проекции на плоскость, так и в перспективе, рабочее состояние, в котором наклонные направляющие повернуты в горизонтальное положение или положение "покоя", которое соответствует их положению на Фиг. 14.
[0070] С использованием упомянутой конструкции и путем выполнения описанной выше операции становится возможным легко и незамедлительно привести в действие упомянутый привод 82 и добиться последующего перемещения упомянутых нижних концов 51 вдоль соответствующего бокового элемента 1А в горизонтальном и продольном прямом и противоположном направлении относительно соответствующего вращающегося вала 32, ось которого обозначена как упомянутая ось X, которое вызывает не только смещение, но также и вращение упомянутых шарнирных тяг 50, результатом чего, как было объяснено выше, является вращение соединенных вспомогательных валов 55, а также соответствующих наклонных направляющих и вращающихся режущих элементов таким образом, что они поднимаются от стола 100, тем самым освобождая путь для транспортировки и ручной обработки продуктов, размещенных на нем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разъединения продуктов сельского хозяйства | 2013 |
|
RU2621936C2 |
| ОТРЕЗНОЙ СТАНОК СО СТОЛОМ | 2009 |
|
RU2404029C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ КРЕПЛЕНИЯ РЕЖУЩЕГО ЭЛЕМЕНТА | 2006 |
|
RU2395370C2 |
| Измельчающее устройство и способ технического обслуживания такого устройства | 2018 |
|
RU2765814C2 |
| НАСТОЛЬНОЕ РЕЖУЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2398674C1 |
| СТАНОК ДЛЯ РЕЗКИ ПОД УГЛОМ (ВАРИАНТЫ) | 2005 |
|
RU2308359C2 |
| ОТРЕЗНЫЕ УСТРОЙСТВА | 2009 |
|
RU2424879C2 |
| СКЛАДНАЯ СКОЛЬЗЯЩАЯ ТОРЦОВОЧНАЯ ПИЛА | 2016 |
|
RU2712667C2 |
| НАСТОЛЬНОЕ РЕЖУЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2396162C1 |
| ГОРИЗОНТАЛЬНАЯ ВЕТРОСИЛОВАЯ ТУРБИНА | 2010 |
|
RU2539945C2 |




Изобретение относится к сельскому хозяйству, в частности к устройству для разъединения продуктов сельского хозяйства или растениеводства, соединенных между собой отростками, такими как черешки, плодоножки, стебли и т.д., например вишен, небольших кистей томатов «черри» и других, которые были собраны и доставляются соединенными в небольшие пучки. Устройство содержит неподвижную конструкцию, имеющую два параллельных горизонтальных боковых элемента, множество режущих модулей, снабженных обычным вращающимся валом, который имеет множество вращающихся режущих элементов, установленных в фиксированных положениях по его длине. Валы расположены параллельно один другому и установлены выше средств транспортировки, пригодных для перемещения продуктов, помещенных на них, в направлении к упомянутым вращающимся режущим элементам. Устройство также имеет множество позиционирующих наклонных направляющих, которые установлены в положении, соответствующем соответствующему вращающемуся режущему элементу, имеют продолговатую форму в направлении движения упомянутых средств транспортировки, значительно уплощены и вертикально ориентированы. Их продолговатая верхняя кромка ориентирована по нисходящей линии в направлении к упомянутым средствам транспортировки с таким наклоном, что высота упомянутых кромок увеличивается в направлении подачи средств транспортировки таким образом, что кисти продуктов, помещенных на упомянутых средствах транспортировки, перемещаются в направлении к упомянутым наклонным направляющим. Соответствующая верхняя кромка направляющих определяет точку пересечения соответствующего режущего элемента с плодоножками каждой кисти, подаваемой под режущий элемент. В устройстве также предусмотрены средства перемещения, предназначенные для вращения вспомогательного вала вокруг его центра вращения, так что упомянутые верхние кромки и тонкие концы соответствующих наклонных направляющих поворачиваются на заранее определенный угол, обуславливая поворотный подъем упомянутых наклонных направляющих. Использование изобретения позволит провести качественную обработку по разъединению продуктов сельского хозяйства. 8 з.п. ф-лы, 26 ил. 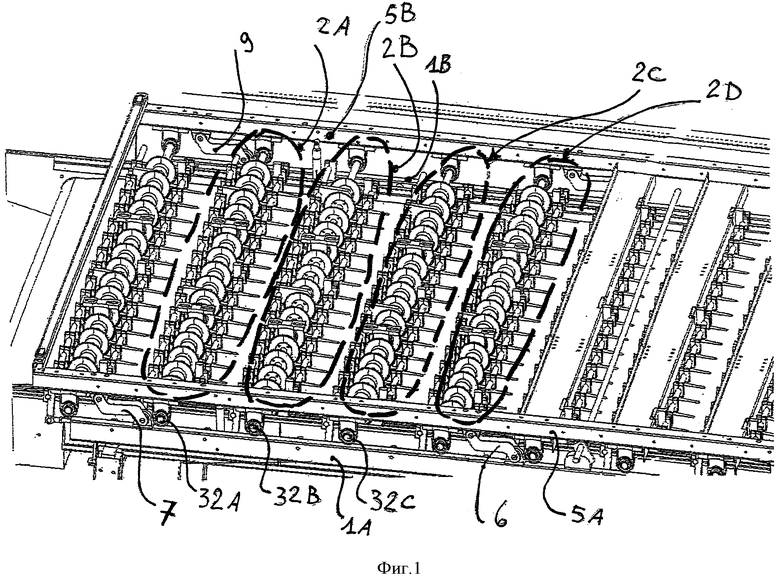
1. Устройство для разъединения продуктов растениеводства, в частности вишен, которое содержит:
неподвижную опорную конструкцию, с рамой и двумя параллельными горизонтальными элементами (1А, 1В), которые определяют внутреннюю, по существу плоскую и предпочтительно прямоугольную, поверхность (S),
средства транспортировки, расположенные в пределах упомянутой поверхности (S), и пригодные для приема и транспортировки упомянутых продуктов растениеводства прямолинейным движением,
множество режущих модулей (2А, 2В, 2С, 2D, …), последовательно расположенных над упомянутой прямоугольной поверхностью (S), каждый модуль содержит соответствующий вращающийся вал (32А, 32В, 32С, …) с множеством вращающихся режущих элементов (11, 12, 13, 14, …), установленных в фиксированных положениях по его длине, упомянутые валы расположены параллельно и установлены выше средств транспортировки, пригодных для перемещения продуктов, помещенных на них, в направлении к упомянутым вращающимся режущим элементам,
множество позиционирующих наклонных направляющих (11-1, 12-1, 13-1, 14-1, …), установленных в соответствии с конкретными вращающимися режущими элементами, упомянутые наклонные направляющие имеют продолговатую форму в направлении движения упомянутых средств транспортировки, сильно уплощены и вертикально ориентированы, продолговатая верхняя кромка упомянутых соответствующих наклонных направляющих ориентирована по нисходящей линии и в направлении упомянутых средств транспортировки с таким наклоном, что высота упомянутых кромок возрастает в направлении движения упомянутых средств транспортировки,
установленную подвижную раму, содержащую две по существу параллельные балки (5-А, 5-В), имеющую геометрическую форму, подобную геометрической форме упомянутой опорной конструкции (1А, 1В), и расположенную выше нее, и упомянутая подвижная рама соединена с упомянутой неподвижной конструкцией посредством множества подвижных рычагов (6, 7-8, 9), каждый из которых соединен на одном из его концов (6А) с некоторой точкой на упомянутой неподвижной конструкции, а на его противоположном конце (6В) - с некоторой соответственной точкой упомянутой подвижной рамы, причем упомянутые концы (6А, 6В), принадлежащие одному и тому же рычагу (6), расположены на различных вертикальных прямых линиях (r, t), так что упомянутая подвижная рама становится способной перемещаться относительно упомянутой неподвижной конструкции поступательным перемещением по круговой траектории,
при этом упомянутая подвижная рама, при сообщении ей единственного поступательного движения по круговой траектории, может отводить или поднимать одновременно упомянутые режущие модули, и, следовательно, соответствующие вращающиеся валы (32А, 32В, 32С, …) и соответствующие наклонные направляющие, относительно упомянутой неподвижной конструкции,
и при этом ось (X) упомянутых вращающихся валов (32А, 32В, 32С, …) выполнена зафиксированной относительно упомянутой подвижной рамы при помощи соответствующих соединительных и опорных элементов (40, 41),
упомянутые средства транспортировки могут транспортировать пучки продуктов, помещенные на них, в направлении упомянутых наклонных направляющих (11-1, 12-1, 13-1, 14-1, …),
механические соединительные элементы, которые содержат для каждого режущего модуля (2А, 2В, 2С, 2D, …) шарнирную тягу (50), шарнирно закрепленную ее нижним концом (51) в неподвижной точке упомянутой опорной конструкции (1А, 1B), а противоположным концом (52) на первом механическом соединительном элементе (53), закрепленном на вспомогательном валу (55), к которому прикреплен второй механический соединительный элемент (54), на одном конце (54В) которого выполнено сквозное отверстие, в котором с возможностью вращения установлен соответствующий вращающийся вал (32С), и наклонная направляющая, соединенная с соответствующим вращающимся валом, взаимодействует, предпочтительно через соответствующий рычаг (56А), с соответствующим вспомогательным валом (55),
и при этом каждая из упомянутых наклонных направляющих (11-1, 12-1, 13-1, …) на соответствующей верхней кромке (11-2, 12-2, 13-2, …) имеет соответствующий паз (11-3, 12-3, 13-3, …), выполненный так, чтобы вмещать нижнюю кромку соответствующего вращающегося режущего элемента (11, 12, 13, …),
отличающееся тем, что оно содержит управляющие и исполнительные средства, способные вращать упомянутый вспомогательный вал (55) вокруг его центра вращения, соответствующего упомянутой оси (X), так что упомянутые верхние кромки (11-2, 12-2, 13-2, 14-2, …) и соответствующие тонкие концы (11-Р, 12-Р, 13-Р, 14-Р, …) соответствующих упомянутых наклонных направляющих (11-1, 12-1, 13-1, 14-1, …) поворачиваются на заранее определенный угол (Δ), обуславливая поворотный подъем упомянутых наклонных направляющих.
2. Устройство по п. 1, отличающееся тем, что упомянутый заранее определенный угол (Δ) имеет такую величину, что упомянутые верхние кромки (11-2, 12-2, 13-2, …) горизонтально выровнены [11-1(B)] с соответствующими упомянутыми тонкими концами (11-Р, 12-Р, 13-Р, …).
3. Устройство по п. 1 или 2, отличающееся тем, что упомянутые средства транспортировки содержат элемент (100) с заданным уровнем, образованный множеством параллельных пазов (20, 21, 22, 23, …), которые по существу перпендикулярны упомянутым вращающимся валам (32А, 32В, 32С, …), причем упомянутые пазы отделены один от другого соответствующими выдающимися над поверхностью частями (20-А, 21-А, 22-А, 23-А, …),
и при этом упомянутый элемент с заданным уровнем перемещается параллельно упомянутым пазам (20, 21, 22, 23, …) и, следовательно, перпендикулярно упомянутым вращающимся валам (32А, 32В, 32С, …),
и тем, что расположение упомянутых наклонных направляющих согласовано с соответствующими упомянутыми пазами, а проекция каждой из упомянутых наклонных направляющих относительно одного из упомянутых пазов выровнена относительно этого же паза.
4. Устройство по п. 3, отличающееся тем, что упомянутые наклонные направляющие, упомянутые механические соединительные элементы, упомянутые шарнирные тяги и упомянутые опорные элементы упомянутого вспомогательного вала имеют такие размеры, координаты и взаимное расположение, что отдаление/приближение упомянутой подвижной рамы относительно упомянутой неподвижной конструкции вызывает поступательно-вращательное перемещение, которое передается как движение на оси вращающихся валов и которое определяет, что наклонные направляющие, которые связаны с одним и тем же вращающимся валом (32С), имеют возможность движения в плоскости, по существу перпендикулярной к соответствующему вращающемуся валу, и движения, включающего в себя изменение наклона направляющих в соответствующем пазу.
5. Устройство по п. 1, отличающееся тем, что упомянутые управляющие и исполнительные средства способны поступательно перемещать упомянутый нижний конец (51) упомянутой шарнирной тяги (50), закрепленной на упомянутой неподвижной опорной конструкции, в другое положение (51А) на упомянутом горизонтальном элементе (1А) в направлении отдаления от упомянутого вспомогательного вала (55).
6. Устройство по п. 5, отличающееся тем, что упомянутая неподвижная опорная конструкция также включает в себя:
ползун (60), который перемещается скольжением относительно соответствующего упомянутого элемента (1А) упомянутой неподвижной конструкции,
множество узлов (61А, 62А, 63А, …) соединения, которые являются зафиксированными относительно упомянутого ползуна (60), и которые выполнены с возможностью закрепления в них соответствующих упомянутых нижних концов (51) соответствующих шарнирных тяг (50).
7. Устройство по п. 6, отличающееся тем, что
упомянутый ползун (60) выполнен с множеством верхних выступающих элементов (61, 62, 63, 64, …),
и упомянутые узлы (61А, 62А, 63А, …) соединения расположены на соответствующих упомянутых верхних выступающих элементах (61, 62, 63, 64, …).
8. Устройство по п. 6 или п. 7, отличающееся тем, что упомянутый ползун (60) соединен со средствами перемещения, так чтобы перемещать его по существу вдоль упомянутых элементов (1А, 1В) и предпочтительно горизонтальным и прямолинейным движением.
9. Устройство по п. 8, отличающееся тем, что
на нижней стороне упомянутого элемента (1А) находится сквозное отверстие (80),
на нижней стороне упомянутого ползуна расположен нижний рычаг (73), выполненный так, чтобы проходить через упомянутое сквозное отверстие (80),
и в котором упомянутые средства перемещения включают в себя привод (82), предпочтительно, гидравлический или пневматический цилиндр, соединенный на одном из своих концов с фиксированной точкой на упомянутом элементе (1А), и на противоположном конце (85) с концом упомянутого нижнего рычага (73).
| US 7033631 B1, 25.04.2006 | |||
| US 3065777 A, 27.11.1962 | |||
| Машина для отделения плодоножек | 1988 |
|
SU1570700A1 |
| Машина для отделения плодоножек | 1982 |
|
SU1090328A1 |

