ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе прямого введения и имплантации устройства для контроля физиологических условий, например, в теле, включая, например, давление внутри воротных и печеночных вен. Эти система и способ относятся к управляемому механизму введения, имеющему возможность имплантации устройства непосредственно в полость тела. Кроме того, настоящее изобретение описывает различные новые механизмы для закрепления имплантированного устройства в целевом месте полого органа.
УРОВЕНЬ ТЕХНИКИ
Системы введения используются, например, для закрепления имплантируемых устройств внутри полости тела. Обычно система введения содержит катетер, имплантируемое устройство и элемент для высвобождения имплантируемого устройства в целевой позиции, например, как описано в публикации США № 2003/0125790 и публикации США № 2008/0071248. Катетер внутри себя содержит систему введения и обеспечивает возможность продвижения этой системы к целевой позиции, где имплантируемое устройство высвобождается.
Имплантируемое устройство остается внутри тела для выполнения своих заданных функций после отвода назад системы введения.
Важно, что имплантируемое устройство должно быть надежно прикреплено к целевому месту перед тем, как система введения высвободит это устройство. Устройство, которое закреплено ненадежно, может отделиться и создать серьезные угрозы для пациента, особенно если это устройство начинает мигрировать от места имплантации. Плохо закрепленное устройство, которое циркулирует в теле, может привести к серьезным поражениям, включая острый инфаркт миокарда, инсульт и нарушение работы органов. Более того, обычные устройства для введения ограничены введением имплантатов с концентрической ориентацией в трубчатые полые органы, т.е. вдоль направления просвета полого органа, что уменьшает количество доступных мест имплантации и ограничивает способ введения.
Далее, по меньшей мере, в случае обычных стентов, минимальный расширенный диаметр имплантируемого устройства определяется диаметром полого органа. Существующие катетерные процедуры для имплантации устройств в просветы полых органов неприменимы для полых органов, доступ к которым не может быть осуществлен чрескожно. В частности, введение устройств большого диаметра может привести к внутреннему кровотечению, как это бывает, например, при доступе к воротной вене для контроля воротной гипертензии. Таким образом, существует потребность в системе введения, которая обеспечивает возможность надежного закрепления имплантируемого устройства в теле перед отводом назад этой системы введения. Кроме того, существует потребность в системе, которая обеспечивает возможность введения имплантируемого устройства с ориентацией, перпендикулярной целевым тканям, и требует сцепления только с частью этих целевых тканей, а также потребность в имплантируемом устройстве, размеры которого не ограничиваются размерами целевого полого органа.
Система, которая имеет возможность прямой, надежной и безопасной имплантации устройства, уменьшит сложность такой процедуры и потребность в послеоперационных процедурах, что обеспечит благоприятные результаты для врача и пациента.
Таким образом, существует потребность в системе введения, которая бы обеспечила возможность прямой, безопасной и надежной имплантации устройства в тело.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе прямого введения и способу надежной имплантации устройства, например, в структуры тела, для измерения различных физиологических характеристик. Настоящее изобретение полезно в клинической практике, где оно уменьшает время, требующееся для процедуры имплантации, и устраняет необходимость в многократных повторных попытках имплантации в случае, если первая попытка имплантации была неудачной, или в постимплантационной проверке надежности закрепления. Кроме того, настоящее изобретение может устранить необходимость в последующей процедуре извлечения отделившегося имплантируемого устройства, как это бывает в случае, когда устройство не было надежно имплантировано с самого начала. Настоящее изобретение не ограничено целевыми местами в просветах трубчатых полых органов, и эти целевые места включают нетрубчатые полые органы, а также структуры, не являющиеся полыми органами, например, такие, как перегородка в сердце при измерении давления в левом предсердии, и паренхима печени при измерении внутрибрюшного давления. Имплантируемое устройство согласно настоящему изобретению требует лишь небольшой части целевых тканей и имеет меньший профиль благодаря тому, что требуемый размер имплантируемого устройства не определяется диаметром места имплантации в трубчатом полом органе, что обеспечивает более легкое маневрирование системы и еще более увеличивает доступность мест имплантации, включая, например, воротную вену для контроля воротной гипертензии. Настоящее изобретение дает преимущества, состоящие в уменьшенном времени процедуры, более безопасном доступе благодаря меньшему диаметру проколов, дополнительных местах для имплантации, уменьшенном процедурном дискомфорте, уменьшенной необходимости в последующих процедурах, а также в повышенной доступности мест имплантации.
Согласно настоящему изобретению создана система прямого введения имплантируемого устройства, которая содержит канюлю, толкатель, управляемый механизм размещения, имплантируемое устройство и измеритель усилия, имеющий предел обратного усилия, и в которой толкатель, управляемый механизм размещения и имплантируемое устройство расположены внутри канюли, причем имплантируемое устройство с возможностью отсоединения прикреплено к управляемому механизму размещения, а управляемый механизм размещения расположен на дистальном конце толкателя и выполнен с возможностью управляемого высвобождения имплантируемого устройства, когда измеритель усилия достигнет предела обратного усилия после отвода назад толкателя.
Предпочтительно, система дополнительно содержит игольчатый фиксатор, имеющий проксимальный конец, соединенный с имплантируемым устройством, и заостренный дистальный конец.
Предпочтительно, система дополнительно содержит, по меньшей мере, один шип, проходящий из игольчатого фиксатора между проксимальным концом и дистальным концом игольчатого фиксатора.
Предпочтительно, система дополнительно содержит стопор между, по меньшей мере, одним шипом и проксимальным концом игольчатого фиксатора.
Предпочтительно, стопор является плоским диском, имеющим площадь поверхности, проходящую по радиусу от игольчатого фиксатора.
Предпочтительно, система дополнительно содержит прокладку, расположенную между проксимальным концом игольчатого фиксатора и стопором.
Предпочтительно, система дополнительно содержит кнопку, имеющую головку и ножку, проходящую от головки, причем ножка имеет проксимальный конец, соединенный с головкой, и заостренный дистальный конец.
Предпочтительно, система дополнительно содержит буртик на ножке между проксимальным и дистальным концами ножки.
Предпочтительно, система дополнительно содержит, по меньшей мере, один вырез на буртике.
Предпочтительно, система дополнительно содержит отверстие в головке, причем имплантируемое устройство размещено в отверстии.
Предпочтительно, имплантируемое устройство прикреплено непосредственно к головке.
Предпочтительно, толкатель содержит участок толкателя с обратной формой.
Предпочтительно, участок толкателя с обратной формой с возможностью отсоединения соединен с имеющим ответную форму участком имплантируемого устройства.
Предпочтительно, имеющий ответную форму участок имплантируемого устройства является конусом.
Предпочтительно, участок толкателя с обратной формой прикреплен к имеющему ответную форму участку имплантируемого устройства магнитным, полимерным или адгезивным средством.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее изобретение будет пояснено более подробно со ссылкой на прилагаемые чертежи, на которых:
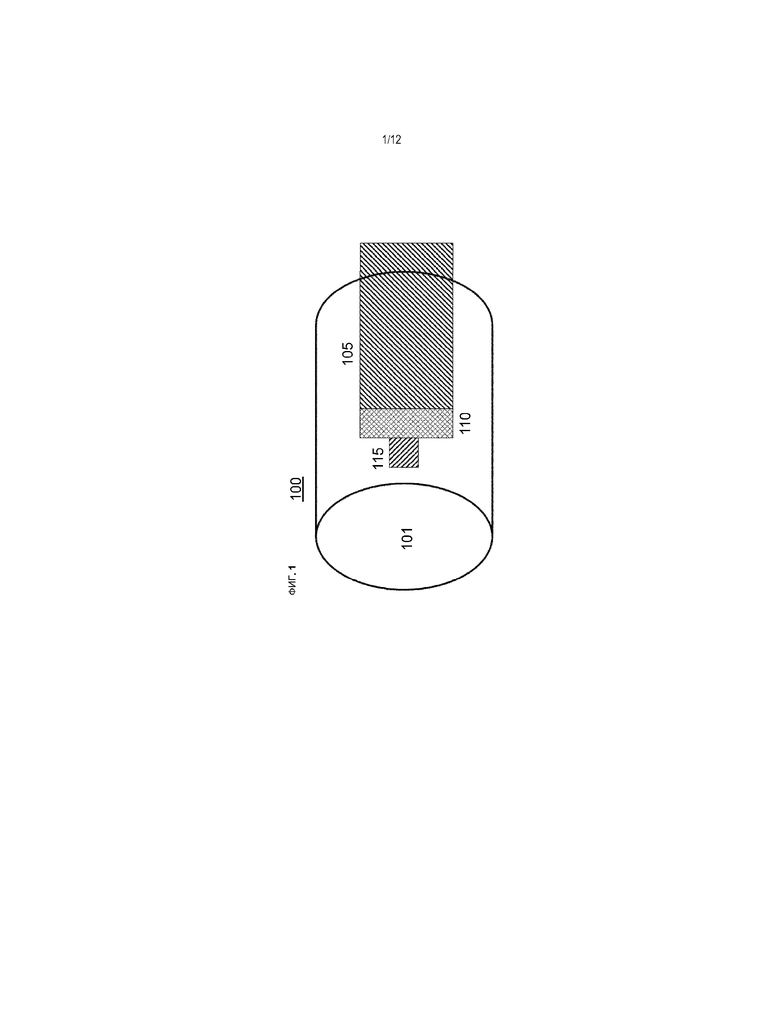
ФИГ. 1 показывает систему прямого введения согласно настоящему изобретению.
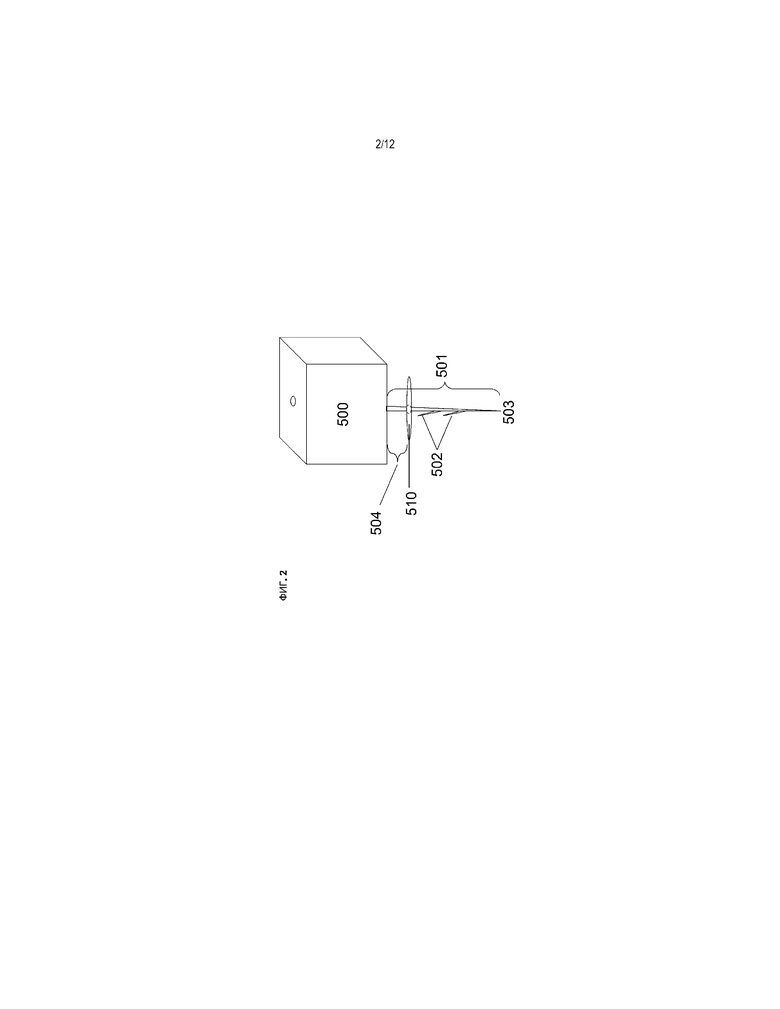
ФИГ. 2 показывает имплантируемое устройство, имеющее игольчатый фиксатор и стопор.
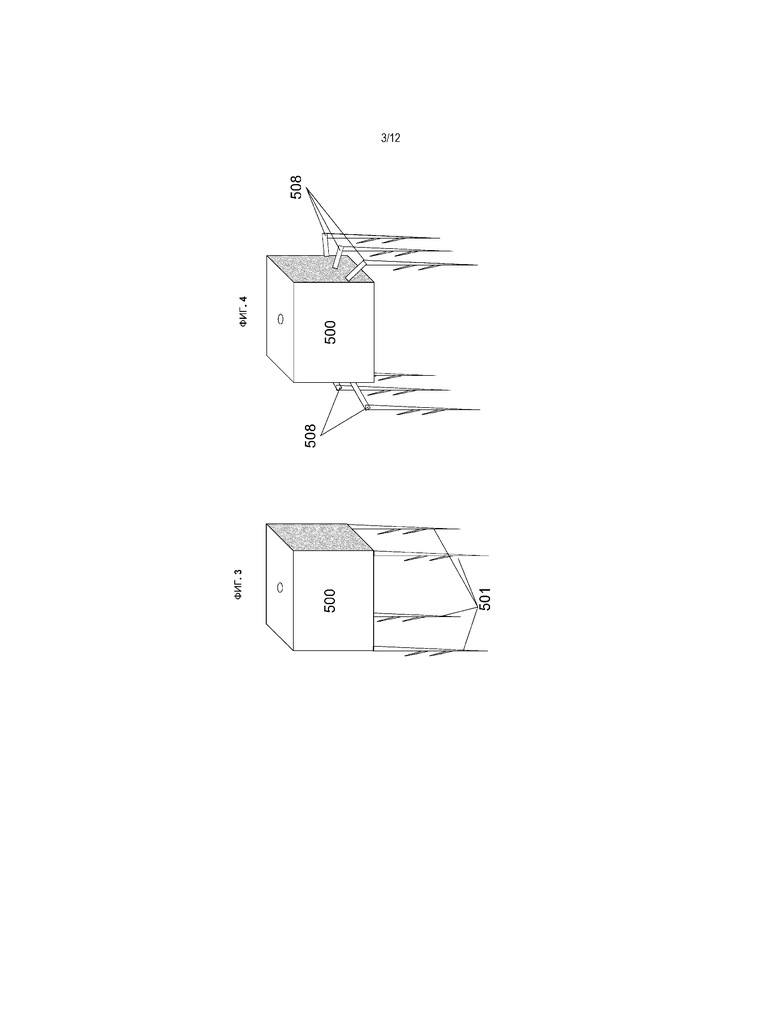
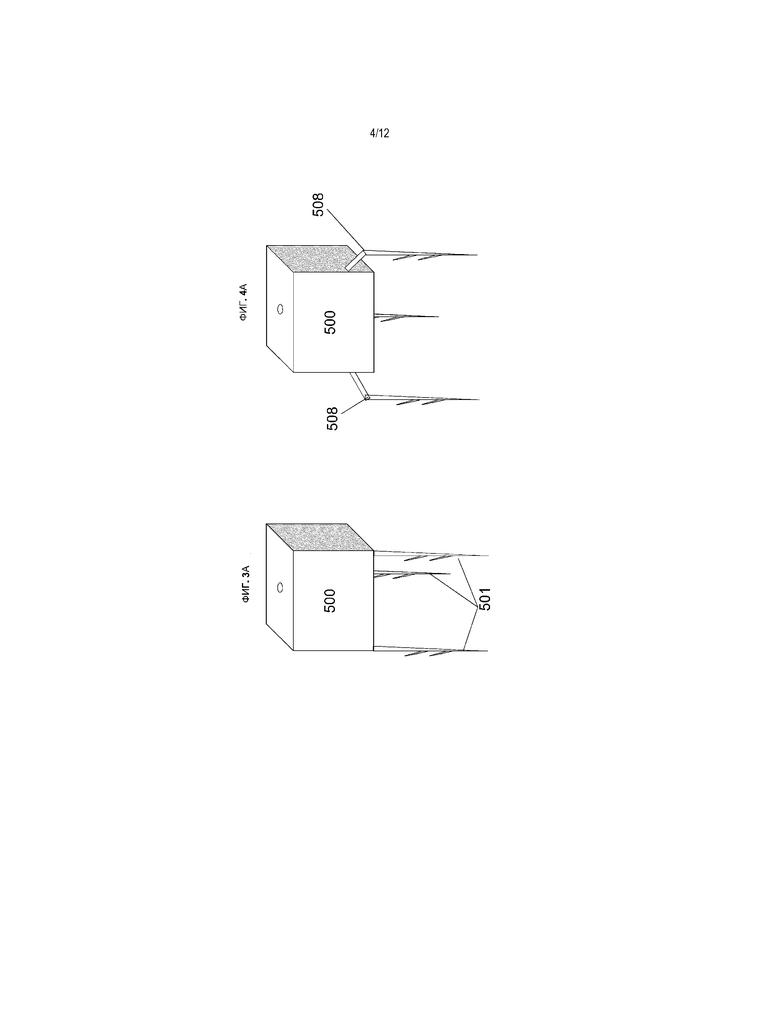
ФИГ. 3 и 3А показывают имплантируемые устройства с четырьмя и тремя игольчатыми фиксаторами соответственно.
ФИГ. 4 и 4А показывают имплантируемые устройства с четырьмя и тремя шарнирными игольчатыми фиксаторами соответственно.
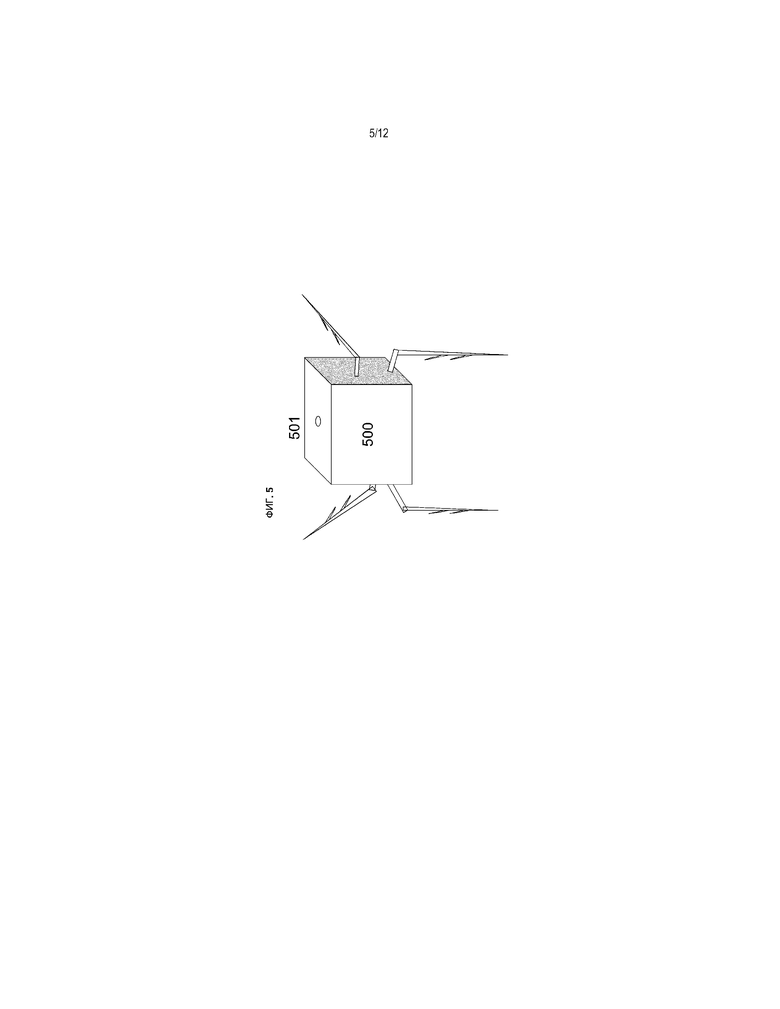
ФИГ. 5 показывает имплантируемое устройство с четырьмя шарнирными игольчатыми фиксаторами, расположенными в различных направлениях.
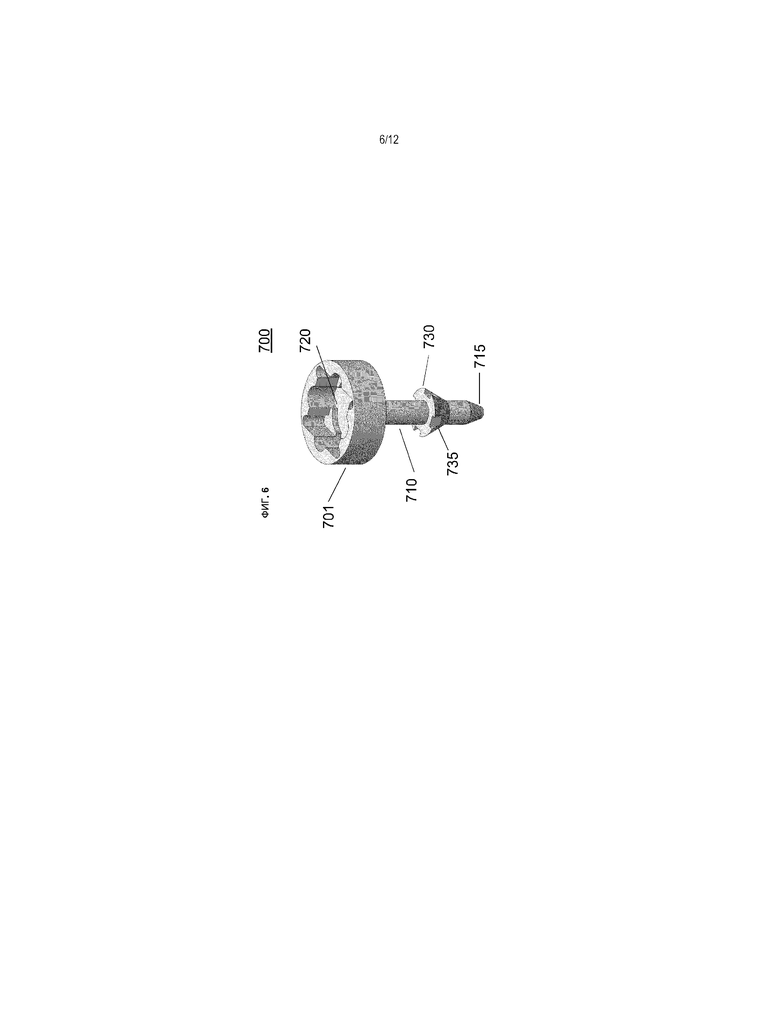
ФИГ. 6 показывает крепежный элемент в виде кнопки.
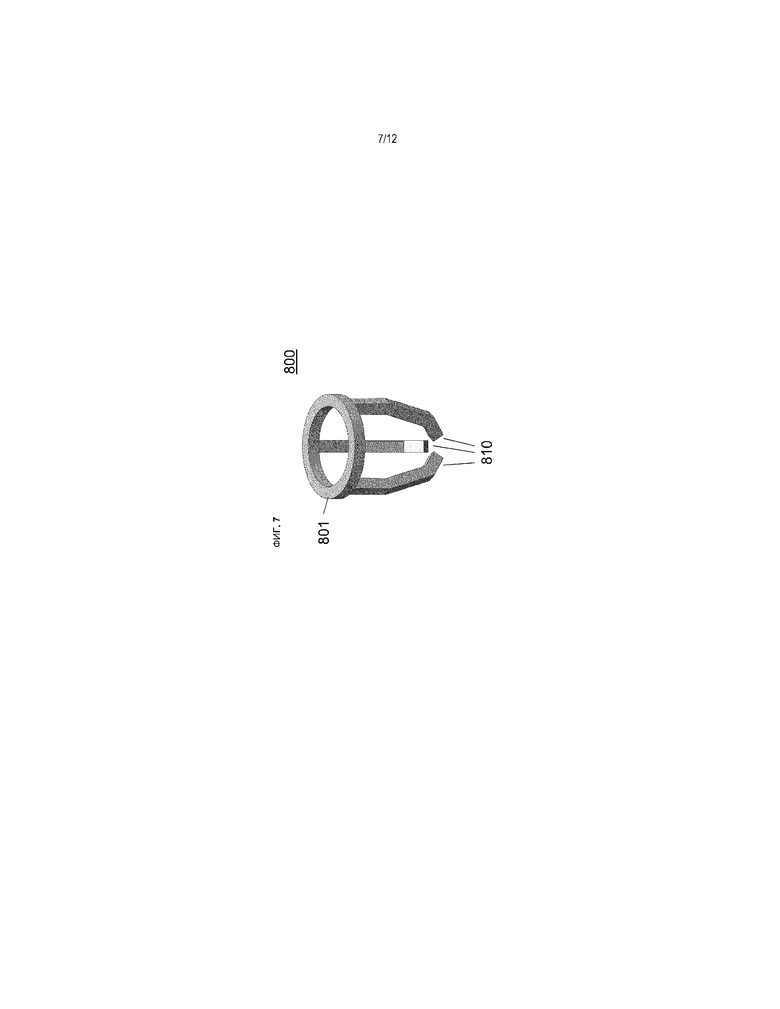
ФИГ. 7 показывает крепежный элемент в виде кольца с ножками.
ФИГ. 8 показывает крепежный элемент в виде кольца с ножками, имеющими несколько сегментов.
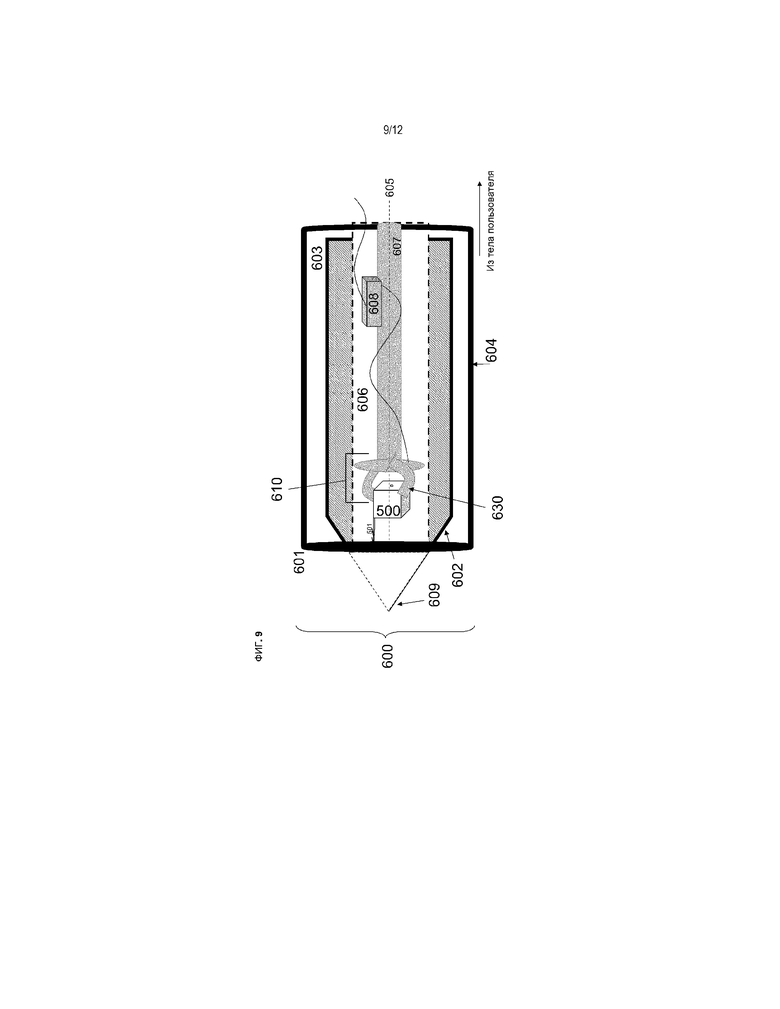
ФИГ. 9 показывает систему прямого введения, содержащую канюлю, толкатель, управляемый механизм введения и имплантируемое устройство.
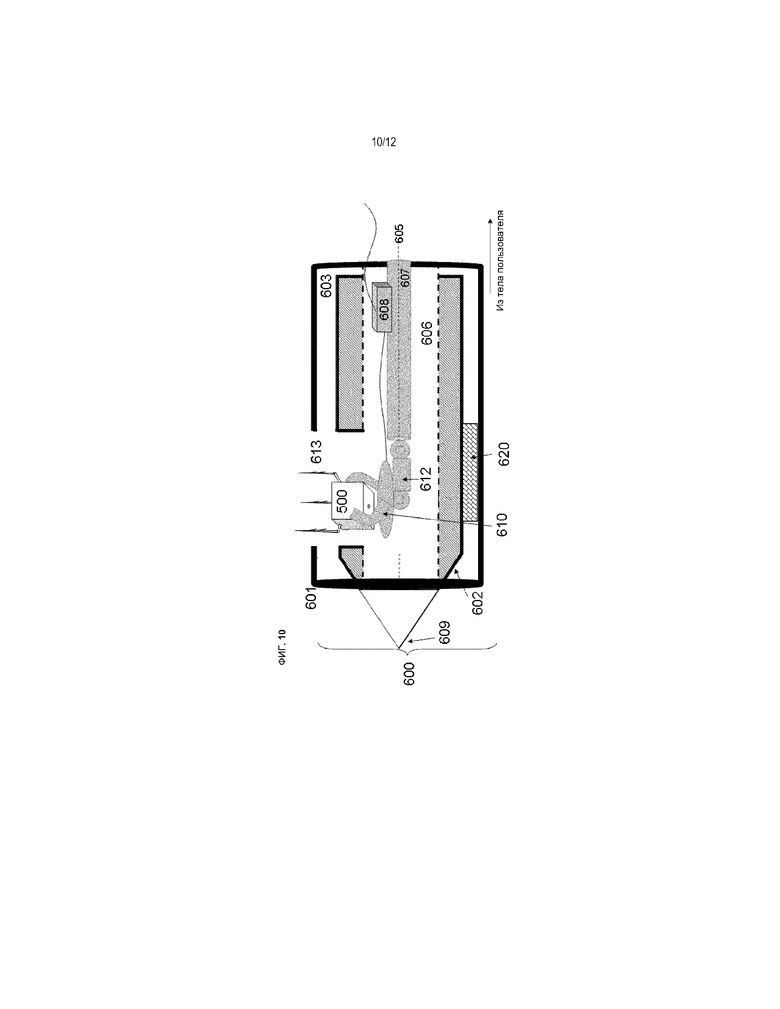
ФИГ. 10 показывает систему прямого введения, имеющую отверстие в стенке канюли.
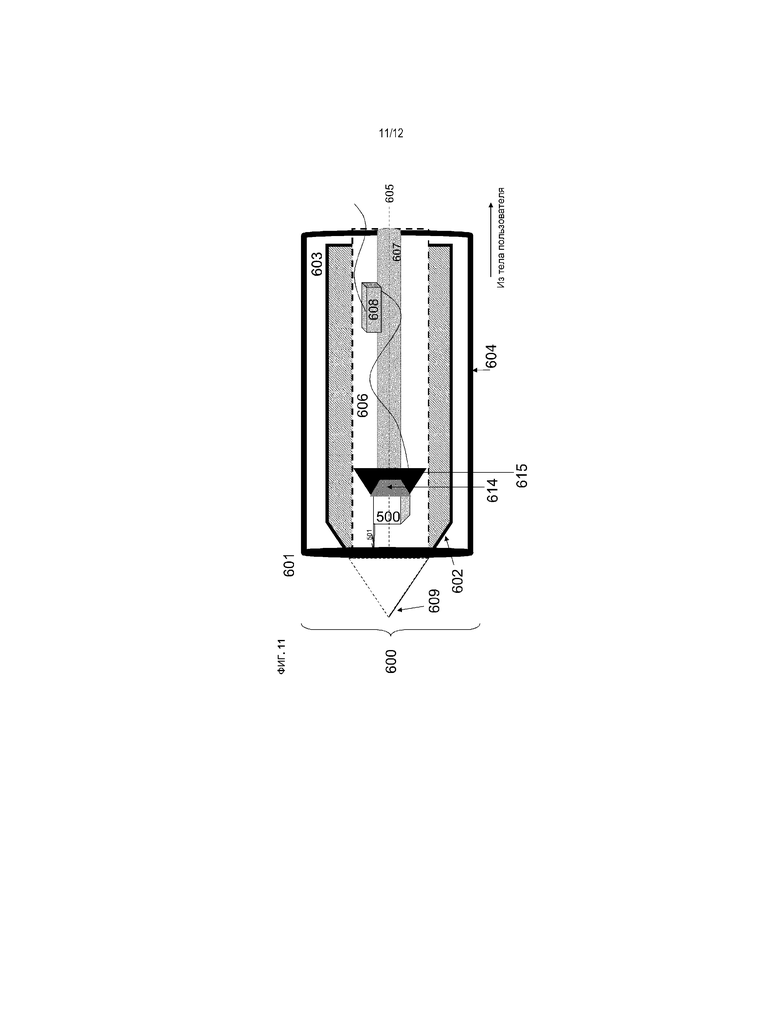
ФИГ. 11 показывает альтернативный вариант реализации системы прямого введения согласно настоящему изобретению.
ФИГ. 12 показывает пример целевого места для системы прямого введения, описываемой в настоящей заявке.
Настоящие чертежи приведены в качестве примеров для лучшего понимания настоящего изобретения и для схематического иллюстрирования конкретных вариантов и деталей изобретения. Квалифицированные специалисты легко приведут другие подобные примеры, также находящиеся в рамках объема изобретения. Чертежи не предназначены для ограничения объема изобретения, определяемого приложенной формулой изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к системе прямого введения имплантируемого устройства в организм. В частности, данная система относится к устройству, которое имплантируются в организм для контроля физических или химических параметров тела.
Размер и относительно низкая инвазивность этих системы особенно хорошо подходят для медицинских и физиологических применений, включая, в том числе, измерение характеристик крови в кровеносных сосудах/артериях/венах, например, таких, как химические или физические параметры крови. Данные устройство и способ применимы, например, для контроля определенных заболеваний или условий, для доставки лекарственного средства или для других подобных ситуаций.
Система прямого введения содержит проводниковую канюлю, толкатель, управляемый механизм введения и имплантируемое устройство. Система прямого введения может дополнительно содержать иглу, расположенную внутри канюли («игла-сердечник») или отдельно от канюли. Если не указано иное, то любые ссылки на «канюлю» будут здесь относиться как к канюлям с иглой-сердечником, так и к канюлям без иглы-сердечника. Проводниковая канюля содержит внутреннюю полость, в которую помещается система, и толкатель, расположенный в этой внутренней полости. Фиг. 1 показывает систему введения 100, в которой во внутренней полости проводниковой канюли 101 расположен толкатель 105. На конце толкателя расположен управляемый механизм 110 введения, и к механизму 110 прикреплено имплантируемое устройство 115. Управляемый механизм введения может в качестве опции дополнительно содержать измеритель усилия, не показанный на фиг. 1, для обеспечения обратной связи с оператором при измерении толкающего усилия, используемого для закрепления имплантируемого устройства 115, и/или тянущего усилия, приложенного к закрепленному имплантируемому устройству.
Проводниковая канюля выполнена с возможностью размещения в ней толкателя, управляемого механизма введения и имплантируемого устройства. В качестве опции, канюля с иглой-сердечником может быть выполнена с возможностью размещения иглы, причем эта игла может вытягиваться назад через канюлю после первоначального прокалывания тканей и/или во время продвижения устройства к месту имплантации. Канюля может иметь внешний диаметр в диапазоне от 1 до 50 G (G - калибр иглы), внутренний диаметр в диапазоне от 0,01 до 20 мм и длину от 1 до 200 см и изготавливается из подходящего полугибкого биосовместимого материала для использования внутри тела.
Подходящие материалы включают, например, силиконы, поливинилхлорид (ПВХ) и другие биосовместимые материалы медицинского назначения. В одном из конкретных вариантов проводниковая канюля имеет внешний диаметр 17 G (калибр 17, что соответствует внешнему диаметру 1,47 мм), внутренний диаметр 1,06 мм, длину 20 см и изготовлена из полугибкого биосовместимого материала.
Толкатель расположен во внутренней полости проводниковой канюли и прикреплен к управляемому механизму введения и имплантируемому устройству. Толкатель может иметь внешний диаметр в диапазоне от менее чем 0,01 до более чем 20 мм, длину в диапазоне от 1 до 200 см и участок с обратной формой - обратным конусом на дистальном конце, выполненный с возможностью защиты области вокруг имплантируемого устройства.
Толкатель выполнен с возможностью продольного перемещения внутри полости канюли от проксимального конца канюли до целевого места имплантации для введения имплантируемого устройства. Толкатель изготовлен из подходящего полугибкого биосовместимого материала, такого как силикон, ПВХ, титан или нержавеющая сталь. Материалы канюли и толкателя могут быть одинаковыми или различными. Система может дополнительно содержать саморегулирующийся ориентирующий элемент для углового ориентирования, расположенный между толкателем и механизмом введения и обеспечивающий регулирование ориентации при введении, когда толкатель не перпендикулярен целевому месту. В этом случае ориентирующий элемент может быть, например, пассивным шарниром, который регулирует угол механизма введения относительно целевого места. Ориентирующий элемент может зацепляться или изгибаться, как только часть имплантируемого устройства закреплена в целевом месте, и этот ориентирующий элемент обеспечивает возможность перемещения свободных (не закрепленных) частей имплантируемого устройства относительного целевого места. Ориентирующий элемент дает возможность механизму введения занять более перпендикулярное положение относительно целевого места для надежной имплантации.
В другом варианте канюля может иметь отверстие в своей стенке. Когда канюля пересекает просвет полого органа в поперечном направлении, она в то же время перемещается параллельно направлению этого просвета, и отверстие располагается перпендикулярно канюле и стенке органа. Соответственно, данное отверстие обеспечивает возможность введения имплантируемого устройства через это отверстие непосредственно в стенку сосуда. Далее, толкатель может быть выполнен таким образом, что он может сгибаться в данном отверстии, обеспечивая возможность проталкивания имплантируемого устройства через это отверстие. Таким образом, данное отверстие обеспечивает возможность имплантации имплантируемого устройства в положении, при котором канюля коаксиально параллельна стенке сосуда. Управляемый механизм введения прикреплен к толкателю и выполнен с возможностью управляемого высвобождения имплантируемого устройства, прикрепленного к управляемому механизму введения, в месте закрепления. Управляемый механизм введения содержит средства для введения имплантируемого устройства, такие, как, например, магнитные, полимерные, липкие, механические или другие средства, либо комбинацию средств, что обеспечивает возможность управляемого высвобождения имплантируемого устройства в месте закрепления. Управляемый механизм введения может управляться оператором, так что имплантируемое устройство высвобождается по усмотрению оператора. Например, этот механизм может содержать управляемый оператором захватный механизм, такой как захват, который удерживает имплантируемое устройство во время доставки и высвобождает имплантируемое устройство в результате манипуляции оператора. Помимо этого, управляемый оператором механизм введения может быть также выполнен на основе материалов с памятью формы, например, нитинола или полимеров с памятью формы, которые могут управляться с использованием хорошо известных средств из данной области техники, таких как тепловая, световая, химическая, рН-, магнитная или электрическая стимуляция, описанных, например, в U.S. No. 6,720,402 и U.S. No. 2009/0306767, оба из которых полностью включены в данную заявку посредством ссылок. Например, материал с памятью формы может представлять собой пружину, имеющую возможность сжатия и растяжения при подаче и выключении электрического тока. Электроактивные полимеры или магнитные сплавы с памятью формы также могут применяться подобным образом. Еще одним примером может являться механизм со шнуром и петлей, в котором шнур продет через петлю или сходную кольцевую структуру имплантируемого устройства, и два конца шнура расположены в направлении проксимального конца управляемого механизма введения. Для подтверждения надежного закрепления имплантируемого устройства можно потянуть за оба конца шнура, чтобы убедиться, что имплантируемое устройство не отделилось. Путем отпускания одного конца шнура обеспечивается вывод шнура из петли, и после этого механизм введения может быть извлечен. Управляемый механизм введения может иметь любой подходящий размер или форму, обеспечивающие возможность размещения в полости канюли.
В другом варианте управляемый механизм введения не управляется оператором, но представляет собой самоуправляемый механизм введения, который может быть выполнен на основе механических, магнитных или полимерных средств, например, адгезивного материала. Самоуправляемые механизмы этого типа автоматически отсоединяют имплантируемое устройство от управляемого механизма введения без отсоединяющих манипуляций оператора. Самоуправляемый механизм введения имеет предел по обратному усилию, т.е. пороговое значение не выше, чем усилие, необходимое для надлежащего закрепления имплантируемого устройства, прикрепленного к управляемому механизму, когда после надежной имплантации устройства управляемый механизм введения автоматически отделяется от имплантируемого устройства при отводе назад толкателя.
"Надежное закрепление" в том смысле, в котором данный термин используется здесь, относится к усилию, требующемуся для отрыва устройства от целевого места. Данное усилие выше, чем усилие, требующееся для отделения имплантируемого устройства от управляемого механизма введения. В мягких тканях, таких как кровеносные сосуды, надежное закрепление может быть достигнуто при условии приложения усилия не менее 1 г и не более 1 кг. В противном случае устройство останется прикрепленным к управляемому механизму введения после отвода назад толкателя. Например, на имплантируемое устройство и/или управляемый механизм введения может быть нанесено адгезивное вещество, обеспечивающее разделение, как только имплантируемое устройство будет надежно закреплено в целевом месте.
В другом варианте управляемый механизм перемещения может содержать механические средства, такие как фланец, приспособленный под имплантируемое устройство и/или управляемый механизм перемещения и обеспечивающий отделение имплантируемого устройства от управляемого механизма введения, как только имплантируемое устройство будет надежно закреплено в целевом месте. Еще одним вариантом может быть магнитный механизм на имплантируемом устройстве и/или управляемом механизме введения, обеспечивающий отделение имплантируемого устройства от управляемого механизма введения только после того, как имплантируемое устройство будет надежно закреплено. Эти управляемые механизмы введения могут сцепляться и расцепляться с имплантируемым устройством с использованием различных средств. В одном из вариантов управляемый механизм введения управляется оператором на проксимальном конце системы. В другом варианте управляемый механизм смещения может быть самоуправляемым с помощью опционального измерителя усилия, с автоматическим высвобождением устройства, когда к нему приложена предварительно заданная величина усилия. Для обеспечения надежного закрепления устройства в или на целевом месте, может также использоваться комбинация механизмов высвобождения.
Предпочтительно, управляемый механизм введения имеет механизм обратной связи, который обеспечивает надежную имплантацию имплантируемого устройства до отвода назад толкателя. Механизм обратной связи по усилию может быть приспособлен к управляемому пользователем или к самоуправляемому механизму введения, описанному выше. В одном из вариантов механизм обратной связи по усилию может содержать измеритель усилия. Конкретно, этот измеритель усилия обеспечивает обратную связь с оператором по величине толкающего усилия, используемого для закрепления имплантируемого устройства, и/или тянущего усилия, используемого для отделения имплантируемого устройства от управляемого механизма введения. Один из примеров измерителя усилия, который может быть включен в систему согласно настоящему изобретению, описан в публикации США № 2010/0024574, содержание которого включено в настоящую заявку посредством ссылки. Данный измеритель усилия обеспечивает измерения, которые информируют оператора о закреплении имплантата, что для мягких тканей может соответствовать диапазону усилия от 1 г до 1 кг, и обеспечивает возможность принятия оператором решения о том, начинать ли отвод системы.
Как было описано выше, имплантируемое устройство прикреплено к управляемому механизму введения и предназначено для введения в целевое место. Обычно имплантируемое устройство обеспечивает возможность прямого доступа к физиологическим характеристикам, таким как физические и химические характеристики. Химические характеристики включают, например, концентрации ионов, таких как ионы калия и натрия, в физиологических жидкостях, или наличие/отсутствие определенных химических веществ в крови, например, уровни глюкозы или гормонов. Физические характеристики могут включать, например, температуру, давление или насыщенность крови кислородом. Другие физические или химические характеристики могут быть легко измерены согласно тому, что известно из данной области техники и описано в данной заявке. Указанными устройствами обычно являются микродатчики и/или лаборатории на чипе. Имплантируемым устройством может быть, например, датчик с крепежным элементом, имеющим возможность закрепления на целевых тканях. Определенные измерительные устройства предпочтительно используются в несжимаемой окружающей среде. Еще в одном варианте имплантируемое устройство может содержать носитель для локальной, управляемой или устойчивой доставки лекарственных средств; подобное устройство описано в U.S. No. 5,629,008, содержание которого включено в настоящую заявку посредством ссылки.
Габаритные параметры имплантируемого устройства будут определяться размерами целевого полого органа или доступной полости в целевой структуре, не являющейся полым органом. Тем не менее, имплантируемое устройство может иметь максимальный внешний диаметр в диапазоне от 0,01 до 10 мм и высоту не более 20 мм и может предпочтительно адаптироваться для обеспечения возможности интеграции устройства, имеющего диаметр в диапазоне от 0,01 до 10 мм и высоту в диапазоне от 0,01 до 20 мм. Может оказаться желательным, чтобы устройство было полностью интегрировано в крепежный элемент. Предпочтительно, имплантируемое устройство изготавливают из материала, который является нетромбогенным, биологически не разлагаемым и не подверженным биологическому обрастанию. В одном из вариантов имплантируемое устройство имеет максимальный внешний диаметр 1 мм и высоту менее 0,4 мм и обеспечивает возможность интеграции датчика, имеющего диаметр 0,8 мм и высоту 0,3 мм. Одна предпочтительная целевая область для закрепления имплантируемого устройства, которая может быть определена на основе толщины кровеносных сосудов в целевом месте, может иметь диапазон от 0,5 до 50 мм по толщине. Целевые области структур, не являющихся полыми органами, включают перегородку в сердце или паренхиму печени. Имплантаты в сердце могут использоваться, например, для измерения давления в предсердиях при застойной сердечной недостаточности, а в печени - для измерения внутрибрюшного давления.
Имплантируемое устройство может быть закреплено в желаемом положении посредством крепежного элемента. Этот крепежный элемент обеспечивает возможность для имплантируемого устройства оставаться надежно закрепленным в целевой позиции, в то же время обеспечивая возможность отделения управляемого механизма введения от имплантируемого устройства. В одном из вариантов, для фиксации имплантируемого устройства в желаемой позиции могут использоваться крюки, нити или другие средства фиксации. Крепежный элемент изготавливают из любых подходящих биосовместимых материалов, включая нержавеющую сталь, нитинол, материалы с памятью формы, аморфные металлы и биосовместимые полимеры.
Фиг. 2 показывает имплантируемое устройство 500, имеющее иллюстративные средства фиксации. Игольчатый фиксатор 501 может быть прикреплен к имплантируемому устройству 500 путем диффузионного склеивания, сварки, пайки твердым припоем, пайки мягким припоем, прессования или другими подходящими способами. Игольчатый фиксатор 501 представляет собой элемент, имеющий возможность прокалывания тканей и органов, и содержит шипы 502, которые являются элементами с заостренными концами, выступающими под углом, по существу в противоположном направлении от заостренного дистального конца 503 фиксатора 501. Шипы 502 фиксируют прикрепление имплантированного устройства к полому органу или тканям тела благодаря сцеплению с тканями, окружающими прокол, сделанный фиксатором, что предотвращает отсоединение фиксатора. Шипы 502 могут быть выполнены с возможностью складывания по направлению к фиксатору 501 в случае, если его вставляют в ткани тела, и с возможностью раскрытия на некоторый угол относительно фиксатора 501 в случае, если его вытягивают с места имплантации. Складные шипы 502 помогают имплантируемому устройству оставаться на месте имплантации. Стопор 510 на фиг. 2, является, например, по существу плоским диском с поверхностной областью, выступающей во всех направлениях от фиксатора 501; он может также использоваться с любым вариантом фиксатора 501 для предотвращения слишком глубокого проникновения фиксатора 501 в ткани тела путем обеспечения фрикционного или физического барьера. В другом варианте стопор 510 может иметь любую подходящую форму, конструкцию или расположение, легко находимые в данной области техники. Прокладка 504 задает расстояние между стопором и имплантируемым устройством, которое может изменяться в зависимости от позиции целевых тканей. Предпочтительно, расстояние между вершиной фиксатора и стопором приблизительно равно толщине тканевой стенки, являющейся целевой для имплантации, и это расстояние может составлять более 0,1 мм и не более 50 мм. Расстоянием между стопором и имплантируемым устройством определяется расстояние, на котором имплантируемое устройство размещается относительно стенки полого органа. Стопор может использоваться для обеспечения того, чтобы имплантируемое устройство не проникало слишком глубоко в целевое место, независимо от длины толкателя. Расстояние между стопором и имплантируемым устройством может регулироваться таким образом, чтобы имплантируемое устройство располагалось заподлицо со стенкой полого органа (стопор соприкасается с имплантируемым устройством) либо находилось на расстоянии до 50 мм от целевого места. Это расстояние может регулироваться для приведения в соответствие с пространственными условиями конкретного места имплантации. Если имплантируемое устройство является датчиком, то предпочтительно, чтобы этот датчик располагался на расстоянии от тканей тела для предотвращения контакта с тканями или нарастания тканей на датчике.
В другом варианте измеритель усилия, описанный выше, может быть выполнен с возможностью определения начального или иного контакта стопора с тканями в целевой позиции, в дополнение к измерению усилия, используемого для закрепления имплантируемого устройства.
Фиг. 3-5 показывают различные альтернативные варианты имплантируемого устройства с игольчатыми крепежными элементами. Например, на фиг. 3 показано, что по углам устройства может быть установлено несколько фиксаторов 501, конкретно четыре фиксатора. Фиг. 3А, являющийся альтернативным вариантом фиг. 3, показывает три фиксатора, прикрепленных к имплантируемому устройству 500 в форме «треноги». Количество и позиции фиксаторов имплантируемого устройства могут изменяться по желанию в зависимости от конкретного устройства или применения. Фиг. 4 показывает устройство с «паучьими лапками», имеющее множество шарнирных игольчатых фиксаторов 508. Шарнирные фиксаторы могут иметь неподвижные или подвижные шарниры, что обеспечивает возможность определенного перемещения дистального конца фиксатора относительно имплантируемого устройства. Фиг. 4А показывает имплантируемое устройство 500, имеющее три шарнирных фиксатора 508 в форме треноги. Количество шарнирных фиксаторов 508 может изменяться произвольно; можно эффективно использовать от 3 до 10 шарнирных фиксаторов, например, 4, 5, 6 или 7. В качестве альтернативы фиг. 5 показывает шарнирно закрепленные фиксаторы 508, расположенные в нескольких направлениях. Ни количество, ни ориентация неподвижных фиксаторов 501 или шарнирно закрепленных фиксаторов 508 не ограничены. Для помощи в закреплении имплантируемого устройства может использоваться любое количество фиксаторов в любых компоновках и с любой ориентацией. Кроме того, шарнирные фиксаторы, в зависимости от необходимости, могут содержать один или более шарниров для обеспечения желаемой структуры крепления. Фиксаторы на фиг. 3-5 могут содержать шипы, которые складываются по направлению к фиксаторам при прохождении через ткани тела и раскрываются от фиксаторов при вытягивании последних. Хотя фиксаторы на фиг. 3-5 изображены без стопоров, квалифицированные специалисты поймут, что стопоры могут быть прикреплены к указанным неподвижным или шарнирным фиксаторам на различных расстояниях от базы имплантируемого устройства.
Фиг. 6-8 показывают другие крепежные элементы для закрепления имплантируемого устройства в целевой позиции. Фиг. 6 показывает крепежный элемент в форме кнопки 700, содержащий головку 701 и ножку 710. Ножка 710 подбирается по размеру и приспосабливается для размещения в целевом месте, в то время как головка остается в просвете полого органа. На фиг. 6 головка 701 содержит отверстие 720, в котором размещается имплантируемое устройство. Вершина имплантируемого устройства может располагаться заподлицо с головкой при определенных применениях, в то время как при других применениях может потребоваться, чтобы устройство выступало над плоскостью головки. В другом варианте головка 701 не содержит отверстие 720, и имплантируемое устройство крепится непосредственно на внешней поверхности головки 701. Ножка 710 может содержать конический или заостренный конец 715, что обеспечивает возможность легкого введения ножки в целевые ткани. Ножка 710 может также содержать конический буртик 730 для предотвращения отсоединения от целевого места. Буртик 730 на фиг. 6 содержит также несколько вырезов 735 в боковой поверхности. Вырезы образуют острые кромки в буртике 730 и служат для введения в ткани вокруг буртика 730. В другом варианте (не показан) ножка может содержать вместо буртика 730 винты, шипы или другие известные средства из данной области техники для предотвращения отделения от целевого места. Крепежные элементы с винтом содержат винтовые гребни на окружной поверхности ножки, обеспечивающие сопротивление отделению от целевого места. Крепежные элементы с шипами содержат шипы с заостренными концами, выступающие под углом, по существу в противоположную сторону от конического конца, аналогично шипам фиксатора 501 на фиг. 2.
Фиг. 7 показывает еще один вариант крепежного элемента для имплантируемого устройства. В этом варианте крепежные элементы 800 содержат кольцо 801 и две или более ножек 810. На фиг. 7 в качестве примера показаны три ножки 810, однако квалифицированные специалисты поймут, что количество, форма и ориентация этих ножек может изменяться в соответствии с имплантируемым устройством. Кольцо 801 фиксирует имплантируемое устройство, когда ножки 810 входят в целевые ткани для удержания конструкции в целевом месте. Хотя на фиг. 7 показано кольцо 801 круглой формы, это кольцо может иметь любую форму, обеспечивающую закрепление имплантируемого устройства. Предпочтительно, ножки 810 изготовлены из сверхупругого материала или материала с памятью формы, например, Нитинола или полимеров с памятью формы. Кроме того, могут использоваться другие биосовместимые материалы, такие как нержавеющая сталь, аморфные металлические сплавы или биосовместимые полимеры. Ножки содержат один или более сегментов, причем эти сегменты могут располагаться как под углом к соседним сегментам той же ножки, так и под углом к соседним ножкам. Предпочтительно, чтобы ножки были изготовлены из сверхупругого материала и имели предварительно заданное угловое положение относительно кольца. При вводе в канюлю ножки 810 могут складываться внутрь, как показано на фиг. 7, где эти ножки, по существу, перпендикулярны кольцу 801. Будучи выведенными из канюли в место имплантации, ножки 810 прокалывают целевые ткани и раскрываются до предварительно заданного углового положения, что обеспечивает прочную фиксацию в целевых тканях. В другом варианте ножки 810 могут обладать памятью формы в сложенном положении, как показано на фиг. 7. После прохождения через ткани в месте имплантации материал с памятью формы расширяется, в результате чего ножки раскрываются из сложенного, по существу перпендикулярного, положения на фиг. 7, в раскрытое положение. Расширение материала с памятью формы может быть инициировано с помощью хорошо известных средств из данной области техники, таких как тепловая, световая, химическая, рН-, магнитная или электрическая стимуляция.
Фиг. 8 показывает еще один вариант крепежного элемента для имплантируемого устройства. В этом варианте крепежный элемент 900 содержит кольцо 901 и две или более ножек 910, имеющих несколько сегментов. Кольцо 901 закрепляет имплантируемое устройство, когда ножки 910 внедряются в целевые ткани для удержания конструкции в целевом месте. Хотя на рис. 8 изображено кольцо 901 круглой формы, это кольцо может иметь любую форму, обеспечивающую закрепление имплантируемого устройства. Аналогичным образом, хотя изображенные ножки имеют прямоугольную форму сечения, в других вариантах они могут иметь цилиндрическую или другую форму. Каждая из ножек 910 содержит вертикальные сегменты 903, горизонтальные сегменты 905 и крепежный сегмент 907. Вертикальные сегменты 903 и горизонтальные сегменты 905 выполнены чередующимися, как показано на фиг. 8, с образованием впадин 915 и вершин 917, действующих как прокладки для отделения крепежных сегментов 907 от кольца 901. Количество и длина вертикальных сегментов 903 и горизонтальных сегментов 905 могут изменяться для создания крепежных элементов, имеющих различное количество вершин и впадин, а также различную высоту и/или длину вершин и впадин, для регулирования гибкости или жесткости крепежных элементов. Предпочтительно, ножки могут быть изготовлены их сверхупругого материала, например, Нитинола. Могут использоваться и другие биосовместимые материалы, такие как нержавеющая сталь, аморфные металлические сплавы или биосовместимые полимеры. Аналогично варианту на фиг. 7, ножки 910 находятся в радиально сложенном положении, когда фиксатор 900 помещен в канюлю. Сразу же после размещения ножки 910 прокалывают окружающие ткани и раскрываются до заданного углового положения относительно кольца 910. В другом варианте ножки 910 изготовлены из материала с памятью формы и раскрываются после прохождения через целевые ткани. Расширение материала с памятью формы может быть инициировано с помощью хорошо известных средств из данной области техники, таких как тепловая, световая, химическая, рН-, магнитная или электрическая стимуляция. Аналогично вариантам на фиг. 2-5, ножки на фиг. 7-8 могут дополнительно содержать шипы, которые могут складываться по направлению к фиксаторам, когда последние входят в ткани тела, и раскрываться наружу, когда фиксаторы вытягиваются из этих тканей.
На фиг. 9-11 показаны различные варианты системы 600 прямого введения, используемой для доставки имплантируемого устройства 500. На фиг. 9 показана система 600 прямой доставки, содержащая внутривенную канюлю 601, толкатель 607, управляемый механизм 610 введения и имплантируемое устройство 500. Канюля 601 имеет полость 603, которая представляет собой трубчатый проход через канюлю 601. Канюля 601 содержит трубку 604 с продольной осью 605. В данном варианте в полости 603 канюли коаксиально расположена игла 602 для прокалывания тканей и органов тела. Игла 602 содержит игольную полость 606, расположенную коаксиально внутри иглы 602, и толкатель 607, имеющий, по существу, цилиндрическую форму и расположенный коаксиально внутри игольной полости 606. Толкатель 607 выступает наружу системы 600 прямой доставки на проксимальном конце, где он доступен оператору для манипулирования. Толкатель 607 может продвигаться внутри полости 606 к дистальному концу 609 иглы 602. В одном из вариантов эта игла может быть отведена назад через канюлю 601. В другом варианте, не показанном на фиг. 9, игла может быть исключена из системы прямого введения, и толкатель размещается в полости 603 канюли.
В одном из вариантов управляемый механизм введения представляет собой зажим, например, такой, как показан фиг. 9. В этом варианте толкатель 607 отделен от имплантируемого устройства 500 или прикреплен к нему с возможностью открепления посредством зажима 610, который может управляться оператором. Зажим 610 содержит, по меньшей мере, один продолговатый зажимной элемент 630 для выключаемого фрикционного зажатия имплантируемого устройства 500. В этом варианте имплантируемое устройство 500 может содержать один или более игольчатых фиксаторов 501 (или других крепежных элементов), которые облегчают введение устройства через внутреннюю полость 606. Толкатель 607 может использоваться для вдавливания фиксатора 501 в целевые ткани. Фиг. 9 показывает систему введения, имеющую измеритель усилия 608, который измеряет и отображает усилие, прикладываемое к объекту. Измеритель усилия 608 может использоваться для измерения величины усилия, прикладываемого к толкателю 607, и таким образом, для информирования оператора о том, что фиксатор 501 внедрился в ткани, например, путем отображения внезапного повышения и последующего спада приложенного усилия. При этом усилие, измеряемое измерителем 608, может находиться в диапазоне от 1 г до 1 кг. Измеритель усилия 608 может также использоваться для проверки надежности присоединения фиксатора путем измерения тянущего усилия, которое фиксатор 501 способен выдержать без отделения. Как только осуществлено надежное закрепление имплантируемого устройства, оператор может манипулировать зажимным механизмом 610 для высвобождения имплантируемого устройства и отвода назад толкателя.
На фиг. 10 показан еще один вариант системы 600 прямой доставки для имплантируемого устройства 500. Фиг. 10 показывает канюлю 601, имеющую отверстие 613 в стенке 601 вблизи дистального конца системы 600 прямой доставки, что обеспечивает возможность введения имплантируемого устройства 500 в направлении, перпендикулярном стенке полого органа, и может избавить от необходимости трансгепатического прокола вены, как будет описано далее. На фиг. 10 имплантируемое устройство 500 имеет три шарнирных игольчатых фиксатора. Можно использовать другие количества шарнирных фиксаторов, либо вместо этих фиксаторов или вместе с ними использовать другие крепежные элементы, как описано выше.
Согласно фиг. 10, система 600 прямой доставки может продвигаться с помощью артериального доступа без нарушения оптимального положения, с помощью шарнира 612 между толкателем 607 и зажимом 610, что обеспечивает возможность позиционирования зажима 610 под углом к толкателю. Шарнир 612 может быть активным шарниром, управляемым оператором. В таком варианте зажим располагается под углом 90 градусов к толкателю, но возможны и другие углы. Таким образом, имплантируемое устройство 500 может быть размещено даже там, где канюля 601 коаксиально параллельна стенке полого органа. В этом варианте система может дополнительно содержать толкающий компонент 620, который обеспечивает требуемое усилие для надежного закрепления имплантируемого устройства в положении, перпендикулярном стенке полого органа и оси канюли. Например, толкающий компонент 620 может быть расширяемым баллоном, который, будучи расширенным, толкает имплантируемое устройство к целевому месту. В другом варианте толкающий компонент может представлять собой элемент в памятью формы, например нитиноловую пружину, которая может приводиться в действия с помощью хорошо известных средств из данной области техники, таких как тепловая, световая, химическая, рН-, магнитная или электрическая стимуляция. Как показано на фиг. 9, измеритель усилия 608 может использоваться для измерения величины усилия, создаваемого толкателем 607, и таким образом информировать оператора о надежном закреплении имплантируемого устройства перед отводом толкателя. В данном варианте введение имплантируемого устройства через отверстие не требуется. В качестве опции имплантируемое устройство может быть вытолкнуто наружу на дистальном конце канюли и/или этим устройством можно манипулировать с помощью шарнира 12 для оптимального ориентирования для имплантации.
Фиг. 11 показывает еще один вариант системы 600 прямой доставки, в которой имплантируемое устройство 500 надежно прикреплено к управляемому механизму введения, выполненному в виде защитного обратного конуса 614, который изготовлен из биосовместимого материала. Защитный конус на фиг. 11 может также быть изготовлен из магнитного, механического, полимерного или адгезивного материала. В других вариантах управляемый механизм введения, показанный на фиг. 11, не обязательно является коническим, но может иметь любую подходящую форму для доставки устройства.
Защитный конус 614 входит в сопряженную часть 615 толкателя во время доставки. Толкатель 607 продвигает имплантируемое устройство 500 через полость к месту имплантации. Согласно фиг. 11, имплантируемое устройство продвигается через игольную полость 600, которая расположена внутри полости канюли. В другом варианте, который не показан, имплантируемое устройство может продвигаться только через полость канюли. Дальнейшее продвижение толкателя приводит имплантируемое устройство в целевую позицию. Отвод назад толкателя 607 отделяет имплантируемое устройство от защитного конуса 614, оставляя это устройство в месте имплантации, причем обеспечивается надежное закрепление устройства. В варианте, показанном на фиг. 11, усилие, требуемое для отделения защитного конуса 614 от части 615 толкателя, меньше, чем усилие, требуемое для удаления крепежного элемента 501 из тканей тела после надежной имплантации. Соответственно, величина усилия, которое высвобождает имплантируемое устройство из управляемого механизма введения, является регулируемой. Как было указано выше, защитный конус 614 может быть прикреплен к части 615 толкателя с помощью, например, магнитных, механических, полимерных или адгезивных средств. Могут использоваться и другие подобные средства, как это известно в данной области техники. Соответственно, имплантируемое устройство 500 и защитный конус 614 могут быть отделены от системы 600 прямой доставки путем отвода назад толкателя 607 и его части 615 после надежного закрепления фиксатора 501 в целевой позиции. Защитный конус 614 и часть 615 толкателя могут использоваться вместо друг друга или в сочетании в любом из вариантов системы 600 прямой доставки для имплантации устройства 500.
Фиг. 11 показывает использование измерителя усилия 608 вместе с системой. Измеритель усилия соединен с частью 615 толкателя и может измерять усилие, используемое для закрепления имплантируемого устройства 500, а также усилие, используемое для вытягивания имплантируемого устройства из целевой позиции после закрепления. Измеритель усилия 608 является опциональным компонентом системы.
Система прямого введения, описанная выше, может использоваться для имплантации имплантируемого устройства в любые доступные трубчатые или нетрубчатые структуры тела, такие как кардиоваскулярная система, воротные вены печени, гастроинтестинальный тракт, перегородка в сердце или паренхима печени. Например, настоящее изобретение может быть применимо в воротной вене печени во время процедур катетеризации воротной вены для имплантации устройства 500 в воротную вену. Воротная вена является кровеносным сосудом брюшной полости, по которому деоксигенированная кровь поступает в печень для очистки. Система кровеносных сосудов в виде печеночных вен выводит очищенную кровь из печени в нижнюю полую вену, откуда кровь возвращается в сердце. Воротная гипертензия («ВГТ») возникает в случае, если в воротной вене происходит повышение кровяного давления, что может не являться результатом повышения общего системного кровяного давления пациента. Часто ВГТ определяется как «градиент воротного давления или разность давлений между воротной веной и печеночными венами, например, от 10 мм. рт. ст. и выше». Типовое воротное венозное давление при нормальных физиологических условиях приблизительно составляет менее 10 мм рт. ст., а градиент печеночного венозного давления (ГПВД) приблизительно составляет менее 5 мм рт. ст. Повышенное воротное давление приводит к образованию портосистемных шунтов, включая гастроэзофагиальные варикозные расширения. Образовавшиеся варикозные расширения представляют собой большую опасность для пациента из-за своей подверженности разрывам с последующим кровотечением, что во многих случаях приводит к смерти. Из-за этого ВГТ считается одним из наиболее серьезных осложнений цирроза печени и основной причиной осложнений и смертности у пациентов с циррозом. Одним из иллюстративных примеров применения настоящего изобретения является введение имплантируемого устройства для контроля ВГТ.
Фиг. 12 показывает воротную венозную систему; показана воротная венозная система печени, включая правую воротную вену (ПВВ), левую воротную вену (ЛВВ) и главную воротную вену (ГВВ). Предпочтительно, зона имплантации находится в ЛВВ, показанной на фиг. 12.
В случае печеночной вены имплантируемое устройство 500 может быть введено, например, путем транс-яремного доступа к печеночной вене, аналогично процедуре, используемой при измерениях градиента давления в печеночной вене. Имплантация обычно осуществляется интервенционным радиологом под флюорографическим контролем.
Процедура введения с помощью механизма прямого введения, описанного выше, начинается с использования хорошо известных средств для идентификации и доступа к целевой позиции для прямой имплантации. Целевая позиция может быть идентифицирована с помощью флюорографии и/или ультразвука и доступ к ней может быть осуществлен с помощью хорошо известных путей доступа. Например, одним из путей доступа является фронтальный подгрудинный левый путь к левой воротной вене. Первым этапом введения имплантируемого устройства является продвижение комплекта доступа, включая канюлю, через живот в левую долю печени. После достижения требуемой глубины тканей печени игла может быть отведена назад. Целевой полый орган предпочтительно является ветвью большой воротной вены (4-10 мм в диаметре), перпендикулярной продольному направлению основного полого органа. Однако перпендикулярность продольному направлению основного полого органа не требуется, например, в случае использования варианта системы, показанного на фиг. 10. Этап продвижения комплекта доступа может включать использование канюли, имеющей иглу, расположенную внутри канюли и выступающую из дистального конца последней, для прокалывания тканей тела, вытягивание иглы обратно таким образом, чтобы игла была извлечена через канюлю, и последующее продвижение канюли к целевому месту. В другом варианте этап продвижения комплекта доступа может включать использование иглы, отдельной от канюли, для прокалывания тканей тела, удаление иглы, введение канюли и ее продвижение к целевому месту.
Как только целевая позиция полого органа достигнута, толкатель, управляемый механизм введения и имплантируемое устройство вводят в канюлю. Как описано выше, управляемый механизм введения и имплантируемое устройство крепят к дистальному концу толкателя и вводят его в канюлю. Продвигают имплантируемое устройство к дистальному концу с помощью толкателя. При достижении дистального конца канюли продвигают толкатель далее для закрепления имплантируемого устройства в целевом месте. При отводе толкателя прикладывают регулируемую величину обратного (тянущего) усилия, что приводит к отцеплению имплантируемого устройства от толкателя и управляемого механизма введения. Затем удаляют проводниковую канюлю, оставляя имплантируемое устройство в полом органе. Данный способ может быть адаптирован для самоуправляемого или для управляемого оператором механизма введения, описанного выше, а также для других целевых позиций вне печеночно-воротной венозной системы.
В другом варианте данного способа, как только достигнута надлежащая позиция полого органа, толкатель, управляемый механизм введения и имплантируемое устройство вводят в канюлю. Имплантируемое устройство продвигают в дистальную сторону с помощью толкателя. При достижении дистального конца канюли прикладывают величину усилия, которая, например, может быть измерена с помощью измерителя усилия, для продвижения толкателя для обеспечения закрепления имплантируемого устройства в стенке полого органа. При отводе толкателя прикладывают величину тянущего усилия, которая, например, может быть измерена измерителем усилия, для обеспечения надежного закрепления имплантируемого устройства. Далее высвобождают имплантируемое устройство из управляемого механизма введения и отводят назад толкатель. В завершение, извлекают проводниковую канюлю, оставляя имплантируемое устройство в полом органе. Данный способ может быть выполнен с возможностью самоуправляемого или для управляемого оператором механизма введения, описанного выше, а также для других целевых позиций вне печеночно-воротной венозной системы.
Любой из вышеописанных способов может быть осуществлен с помощью канюли, имеющей иглу, расположенную в канюле и выступающую на ее дистальном конце; в способе прокалывают ткани тела, вытягивают назад иглу так, чтобы она была отведена через канюлю, и продвигают канюлю к целевому месту. В другом варианте любой из этих способов может быть осуществлен с помощью иглы, не расположенной внутри канюли; в способе прокалывают ткани тела, извлекают иглу и продвигают канюлю к целевому месту. Еще в одном варианте любой из вышеописанных способов может осуществляться без использования каких-либо игл, например, согласно другой процедуре, которая уже обеспечила доступ к целевому месту; в указанном способе прикрепляют канюлю к средству доступа, например к направляющей проволоке, имеющей доступ к целевому месту, и продвигают канюлю к указанному месту.
Специалистами, имеющим обычную квалификацию в данной области техники, будет высоко оценена возможность осуществления многочисленных изменений, дополнений, модификаций и других действий над тем, что подробно показано и описано в настоящей заявке в различных вариантах, без выхода за рамки идеи или объема настоящего изобретения. Следовательно, предполагается, что объем настоящего изобретения, определяемый нижеследующей формулой изобретения, включает все предвидимые изменения, дополнения, модификации или применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ПРЯМОГО ВВЕДЕНИЯ УСТРОЙСТВА ДЛЯ КОНТРОЛЯ ФИЗИОЛОГИЧЕСКИХ УСЛОВИЙ | 2013 |
|
RU2616131C2 |
| СИСТЕМА РАЗМЕЩЕНИЯ ИМПЛАНТИРУЕМОГО КРЕПЕЖНОГО ЭЛЕМЕНТА, СПОСОБ СБОРКИ ТАКОЙ СИСТЕМЫ И КРЕПЕЖНЫЙ ЭЛЕМЕНТ (ВАРИАНТЫ) | 2013 |
|
RU2684841C2 |
| ИМПЛАНТИРУЕМЫЙ КРЕПЕЖНЫЙ ЭЛЕМЕНТ | 2013 |
|
RU2632524C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОРОТНОГО И/ИЛИ ПЕЧЕНОЧНОГО ДАВЛЕНИЯ И СИСТЕМА ДЛЯ ОТСЛЕЖИВАНИЯ ПОРТАЛЬНОЙ ГИПЕРТЕНЗИИ | 2012 |
|
RU2627154C2 |
| СБОРНЫЙ УЗЕЛ РЕТРАКТОРА ТКАНЕЙ | 2012 |
|
RU2585730C2 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ СЕРДЕЧНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ДОСТАВКИ | 2018 |
|
RU2759657C2 |
| ФИКСАТОРЫ ВОЛОСЯНЫХ ИМПЛАНТАТОВ, СИСТЕМЫ НА ИХ ОСНОВЕ И СПОСОБЫ ИХ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2577511C2 |
| ИМПЛАНТАТ НЕОФАЛЛОСА И СПОСОБ ИМПЛАНТАЦИИ ПЕНИЛЬНОГО ПРОТЕЗА В НЕОПЕНИС | 2017 |
|
RU2748879C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ДРЕНИРОВАНИЯ ЖИДКОСТЕЙ И ПОНИЖЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2004 |
|
RU2361552C2 |
| РЕТРАКТОР ТКАНЕЙ В СБОРЕ | 2011 |
|
RU2559920C2 |


Изобретение относится к медицинской технике, а именно к системе прямого введения и имплантации устройства для контроля физиологических условий, например, в теле, включая, например, давление внутри воротных и печеночных вен. Система прямого введения имплантируемого устройства содержит канюлю, толкатель, управляемый механизм размещения, имплантируемое устройство и измеритель усилия, имеющий предел обратного усилия. Толкатель, управляемый механизм размещения и имплантируемое устройство расположены внутри канюли. Имплантируемое устройство с возможностью отсоединения прикреплено к управляемому механизму размещения, а управляемый механизм размещения расположен на дистальном конце толкателя и выполнен с возможностью управляемого высвобождения имплантируемого устройства, когда измеритель усилия достигнет предела обратного усилия после отвода назад толкателя. Использование изобретения обеспечивает возможность прямой, безопасной и надежной имплантации устройства в тело. 14 з.п. ф-лы, 12 ил.
1. Система прямого введения имплантируемого устройства, которая содержит:
канюлю,
толкатель,
управляемый механизм размещения,
имплантируемое устройство и
измеритель усилия, имеющий предел обратного усилия, и
в которой толкатель, управляемый механизм размещения и имплантируемое устройство расположены внутри канюли, причем имплантируемое устройство с возможностью отсоединения прикреплено к управляемому механизму размещения, а управляемый механизм размещения расположен на дистальном конце толкателя и выполнен с возможностью управляемого высвобождения имплантируемого устройства, когда измеритель усилия достигнет предела обратного усилия после отвода назад толкателя.
2. Система по п. 1, которая дополнительно содержит игольчатый фиксатор, имеющий проксимальный конец, соединенный с имплантируемым устройством, и заостренный дистальный конец.
3. Система по п. 2, которая дополнительно содержит по меньшей мере один шип, проходящий из игольчатого фиксатора между проксимальным концом и дистальным концом игольчатого фиксатора.
4. Система по п. 3, которая дополнительно содержит стопор между по меньшей мере одним шипом и проксимальным концом игольчатого фиксатора.
5. Система по п. 4, в которой стопор является плоским диском, имеющим площадь поверхности, проходящую по радиусу от игольчатого фиксатора.
6. Система по п. 4, которая дополнительно содержит прокладку, расположенную между проксимальным концом игольчатого фиксатора и стопором.
7. Система по п. 1, которая дополнительно содержит кнопку, имеющую головку и ножку, проходящую от головки, причем ножка имеет проксимальный конец, соединенный с головкой, и заостренный дистальный конец.
8. Система по п. 7, которая дополнительно содержит буртик на ножке между проксимальным и дистальным концами ножки.
9. Система по п. 8, которая дополнительно содержит по меньшей мере один вырез на буртике.
10. Система по п. 7, которая дополнительно содержит отверстие в головке, причем имплантируемое устройство размещено в отверстии.
11. Система по п. 7, в которой имплантируемое устройство прикреплено непосредственно к головке.
12. Система по п. 1, в которой толкатель содержит участок толкателя с обратной формой.
13. Система по п. 12, в которой участок толкателя с обратной формой с возможностью отсоединения соединен с имеющим ответную форму участком имплантируемого устройства.
14. Система по п. 13, в которой имеющий ответную форму участок имплантируемого устройства является конусом.
15. Система по п. 13, в которой участок толкателя с обратной формой прикреплен к имеющему ответную форму участку имплантируемого устройства магнитным, полимерным или адгезивным средством.
| US 2010331868 A1, 30.12.2010 | |||
| Устройство для измерения центрального венозного давления | 1991 |
|
SU1802695A3 |
| US 2007270932 A1, 22.11.2007 | |||
| US 2003181794 A1, 25.09.2003. | |||

