Изобретение относится к области технических средств навигации (местонахождения и ориентации в пространстве) танков и/или самоходных артиллерийских установок с устройством вращения / поворота ствола относительно корпуса по азимуту, с использованием спутниковой связи.
В настоящее время широко применяется спутниковая связь для точного определения положения (GPS и др.) и ориентации материальных объектов, включая различные транспортные средства, в том числе танки, характерной особенностью которых является наличие установленной на самоходном гусеничном шасси вращающейся по азимуту артиллерийской установки - пушки, в дополнение к инерциальным системам ориентации и комплексным электронно-оптико-механическим системам целеуказания и наведения ствола артиллерийской установки на цель [1. Интернет-ресурс: Стрельба. - http://btvt.narod.ru/uchebka/fire2.htm. 2. RU №2533645 С2, МПК B60R 25/00, B60K 35/00, G01S 13/93, G08G 1/00).
Наиболее близким к заявляемому устройству по назначению и совокупности существенных конструктивных признаков аналогом (прототипом) является система контроля местонахождения и ориентации в пространстве транспортного средства, содержащая установленные на борту транспортного средства, по крайней мере, два пространственно разнесенных средства спутниковой ориентации, выходы которых подключены к входам бортового компьютера, выход которого выполнен с возможностью записи информации на носитель и передачи ее в пункт контроля движения [3. RU №29139 U1, МПК G01C 21/00, 27.04.2003, Бюл. №12].
В ближайшем аналоге (прототипе) два средства спутниковой ориентации установлены с разнесением в продольном или поперечном направлениях на расстояние не менее 1 м, что для различных перечисленных характерных транспортных средств дает точность ориентации в диапазоне от 0,5 до 1,0 м. В качестве средств спутниковой связи используются, как правило, датчики GPS. При этом точность местонахождения и ориентации возрастает с увеличением «базы» пары датчиков - расстояния между их проекциями на горизонтальную плоскость. В частных примерах выполнения устройства это достигается размещением одного из этих датчиков на отделяемом от корпуса оборудовании, возвращаемом или не возвращаемом метаемые за пределы транспортного средства (снаряды на гибкой связи, ракеты и т.д.).
Однако, в ближайшем аналоге (прототипе) по варианту размещения обоих датчиков на корпусе транспортного средства (очевидно, сюда следует отнести также танки и самоходные артиллерийские установки - САУ) упомянутая база не велика и ограничена длиной корпуса транспортного средства. Вариант же выноса одного из датчиков на артиллерийский снаряд или управляемый реактивный снаряд (УРС) проблематичен как по экономическим, так и по техническим причинам. Это ограничивает технико-эксплуатационные и тактико-технические возможности системы (транспортного средства с такой системой).
Проблема (задача), на решение которой направлено заявляемое изобретение, заключается в расширении технико-эксплуатационных и тактико-технических возможностей системы.
Решение указанной проблемы (задачи) достигается тем, что в системе контроля местонахождения и ориентации в пространстве транспортного средства с артиллерийской установкой, содержащей [системе] установленные на борту транспортного средства минимум два пространственно разнесенных средства спутниковой ориентации, выходы которых подключены к входам бортового компьютера, выход которого выполнен с возможностью записи информации на носитель и передачи ее в пункт управления и контроля движения, согласно заявляемому изобретению, два средства спутниковой ориентации установлены, соответственно, на оси поворота ствола артиллерийской установки по азимуту и на конце ствола.
Решение указанной проблемы (задачи) достигается также следующими дополнительными конструктивными признаками (в дополнение к указанным в предыдущем абзаце основным):
- третье средство спутниковой связи может быть установлено в кормовой части корпуса транспортного средства (это позволяет не только повысить надежность системы и увеличить базу за счет большего расстояния между датчиком на конце ствола и кормовым датчиком, но и определять взаимное положение корпуса транспортного средства и ствола его артиллерийской установки по спутниковой системе; а также повышает надежность системы за счет дублирования в случае выхода части средств из строя);
- при предыдущем признаке, третье средство спутниковой связи установлено в продольной плоскости, проходящей через ось поворота ствола артиллерийской установки по азимуту (это упрощает алгоритм тригонометрических расчетов местонахождения и ориентации как корпуса/шасси транспортного средства, так и ствола артиллерийской установки);
- либо четвертое средство спутниковой связи может быть установлено в носовой части корпуса транспортного средства, в продольной плоскости, проходящей через ось поворота ствола артиллерийской установки по азимуту (это дополнительно повышает точность определения ориентации корпуса транспортного средства и еще больше повышает надежность системы за счет дублирования в случае выхода из строя части средств);
- во всех частных случаях средства спутниковой связи могут быть выполнены в виде датчиков GPS (это в наибольшей степени адаптирует заявляемое предложение к современному уровню развития космической и электронной техники и технологиям, определяет приемлемый стоимостной «коридор» при реализации).
Примеры (для танка как примера транспортного средства с поворотной артиллерийской установкой) выполнения заявляемого изобретения представлены графически:
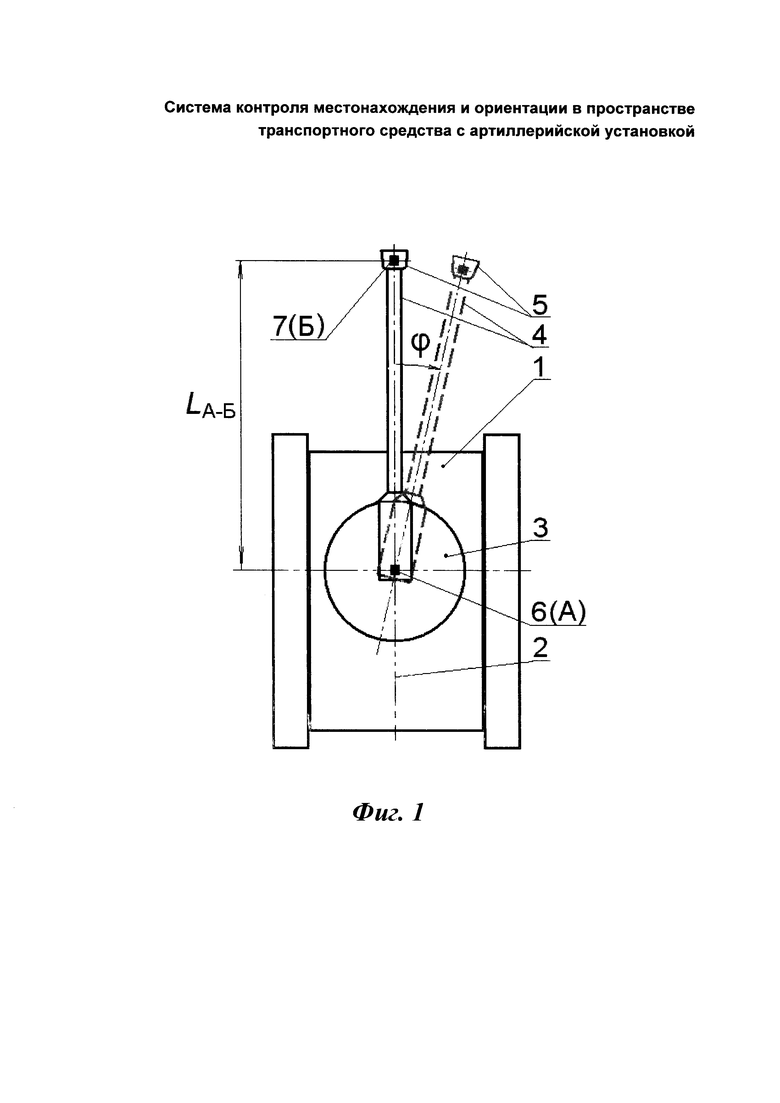
на фиг. 1 - система контроля местонахождения и ориентации в пространстве танка, с двумя датчиками GPS, вид в плане, где LA-B - база (расстояние между проекциями датчиков А и Б на горизонтальную плоскость; ϕ - угол поворота (по азимуту) ствола 3 вокруг оси вращения башни 2;
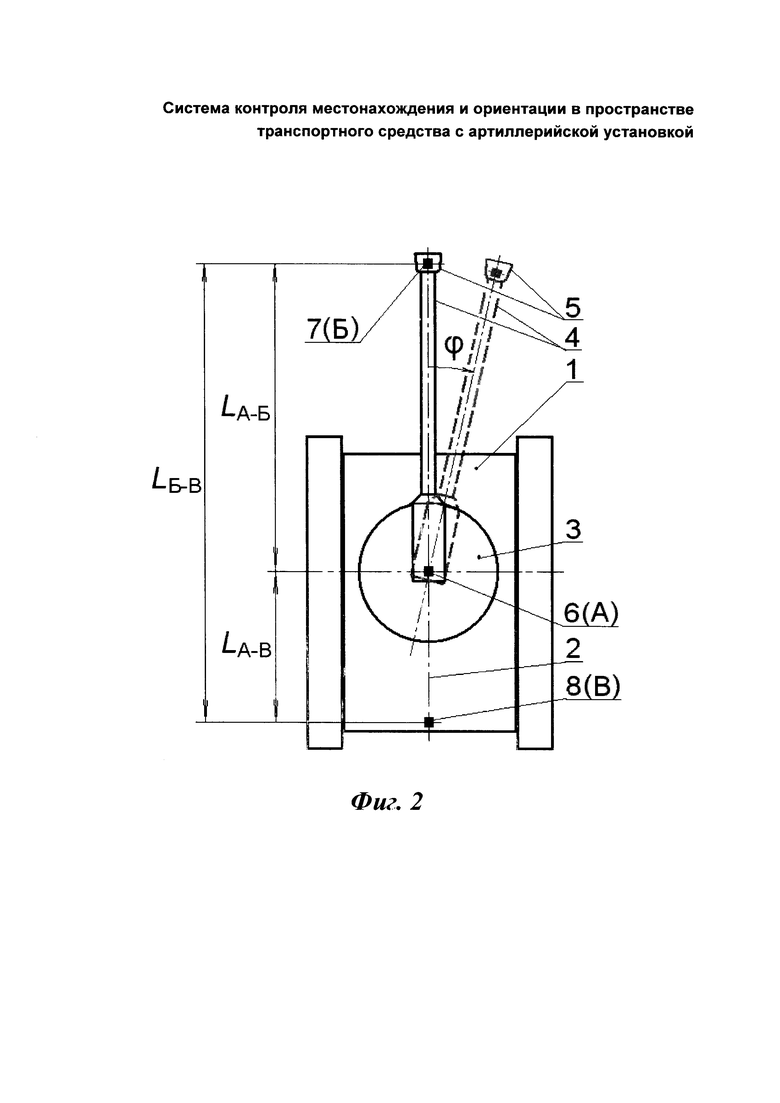
на фиг. 2 - то же, с тремя датчиками GPS, где LA-B - база (расстояние между проекциями датчиков А и В на горизонтальную плоскость) при не повернутом стволе артиллерийской установки;
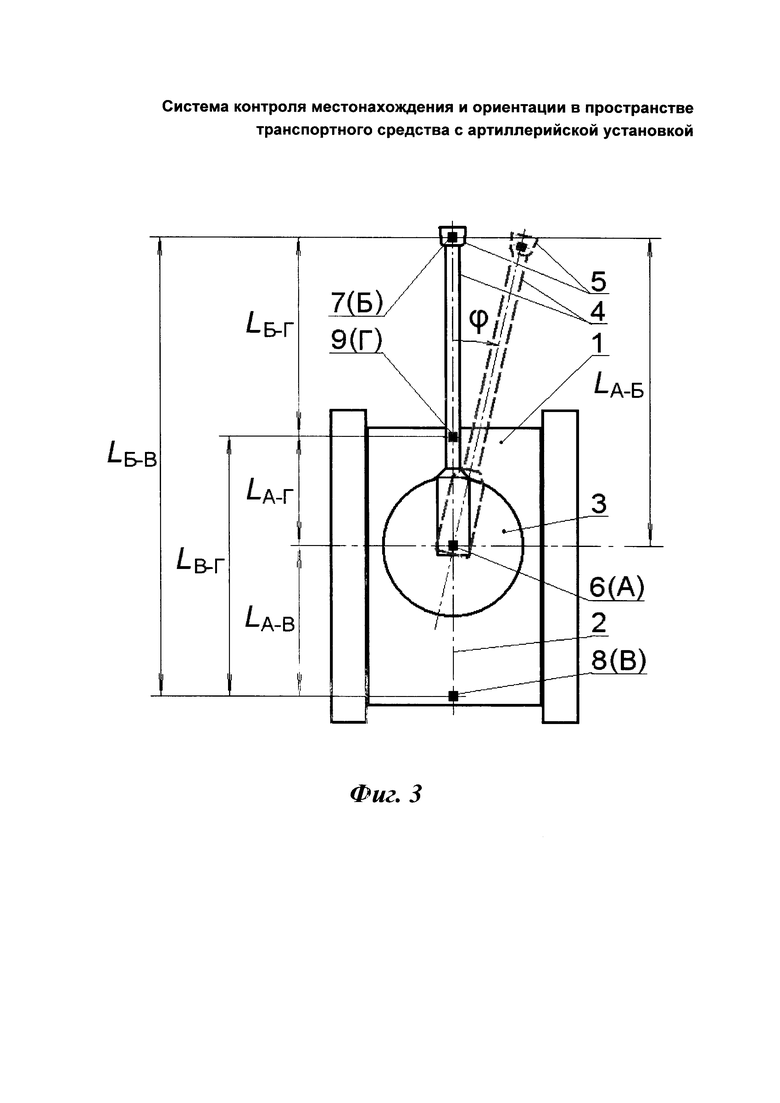
на фиг. 3 - система контроля местонахождения и ориентации в пространстве танка, с четырьмя датчиками GPS, где LБ-Г - база (расстояние между проекциями датчиков Б и Г на горизонтальную плоскость, LB-Г - база (расстояние между проекциями датчиков В и Г на горизонтальную плоскость).
На фиг. 1-3 обозначены позициями: 1 - корпус танка; 2 - вертикальная плоскость, проходящая через продольную ось корпуса 1; 3 - поворотная (вращающаяся) башня танка; 4 - ствол артиллерийской установки, встроенной в башню 3; 5 - дульный тормоз ствола 4; 6 (А) - средство спутниковой ориентации (датчик GPS), установленное(ый) на оси поворота (вращения) башни 3 со стволом 4 артиллерийской установки; 7 (Б) - средство спутниковой ориентации (датчик GPS), установленное(ый) на свободном конце ствола 4, в частности на дульном тормозе 5; 8 (В) - средство спутниковой ориентации (датчик GPS), установленное(ый) в кормовой части корпуса 1; 9 (Г) - средство спутниковой ориентации (датчик GPS), установленное(ый) в носовой части корпуса 1.
Заявляемая система контроля местонахождения и ориентации в пространстве транспортного средства с артиллерийской установкой (далее по тексту - «Система») по частному примеру с двумя датчиками (см. фиг. 1) содержит установленные на борту транспортного средства (ТС), пространственно разнесенные (база LA-Б в проекции на горизонтальную плоскость) средства спутниковой ориентации - датчики GPS А (поз. 6) и Б (поз. 7). Датчик А установлен на оси поворота/вращения ствола 4 (она же - ось поворота/вращения башни 3) артиллерийской установки, а датчик Б (поз. 7) - на свободном конце ствола 4, в данном примере - на дульном тормозе 5.
Система по частному примеру с тремя датчиками (см. фиг. 2) отличается от предыдущей наличием третьего датчика - В (поз. 8), установленного в кормовой части корпуса 1 ТС. Датчикам А, Б, В соответствуют уже три базы (пары) - LA-Б, LА-B, LБ-В соответственно. Последняя из них - при не повернутом стволе 4, то есть при совпадении оси канала ствола 4 с плоскостью 2, - наибольшая.
Система по частному примеру с четырьмя датчиками (см. фиг. 3) отличается от предыдущей наличием четвертого датчика - Г (поз. 9), установленного в носовой части корпуса 1 ТС. Датчикам А, Б, В и Г соответствуют уже шесть баз (пар) - LВ-Г, LA-Б, и LA-В, LА-Г, LБ-Г и LБ-В Последняя из них - также при не повернутом стволе 4 - наибольшая, три предыдущие - резервные (как уступающие другим по величине).
Расположение датчиков А, В, Г на плоскости 2 носит приоритетный, рекомендательный характер и в обоснованных случаях возможно отклонение влево и/или вправо, что, однако, несколько усложнит обработку данных Системой.
Во всех описанных частных примерах выходы датчиков (А, Б, В, Г) подключены к входам бортового компьютера (не показано), выход которого выполнен с возможностью записи информации на носитель и передачи ее в пункт управления и контроля движения транспортного средства и орудийной установки относительно корпуса 1 ТС.
Возможны примеры с вынесенной орудийной установкой (без башни 3).
Заявляемое устройство работает следующим образом.
В примере по фиг. 1, при значении угла ϕ=0° (не повернутый ствол 4), оба датчика - А и Б (поз 6 и 7) расположены в одной плоскости 2. Их координаты по GPS определяются. База LA-Б превышает длину корпуса 1 (а значит, и базу пары корпусных датчиков у прототипа) для многих ТС, особенно с длинноствольными орудийными установками и с центральным и, тем более, передним расположением башни 3 на корпусе 1. Большая база обусловливает более высокую точность определения положения ТС в пространстве и его ориентацию. При повернутом на тот или иной угол ϕ стволе 4, пара датчиков А и Б с базой LA-Б позволяет с такой же точностью определить ориентацию ствола 4.
В примере по фиг. 2, при значении угла ϕ=0° все три датчика - А, Б и В (поз 6-8) расположены в одной плоскости 2. Их координаты по GPS определяются. База LA-Б превышает базу пары корпусных датчиков у прототипа для многих ТС (см. предыдущий пример). Большая база обусловливает более высокую точность определения положения ТС в пространстве и его ориентацию. База LБ-В более определенно и существенней превышает базу пары корпусных датчиков и у прототипа для практически всех ТС, и даже при использовании пары А и Б (см. этот же абзац). Столь большая база (LБ-В) обусловливает еще более высокую точность определения положения ТС в пространстве и его ориентацию. При повернутом на тот или иной угол ϕ стволе 4, два датчика - А и В - расположены в одной плоскости 2, при этом датчики А и Б с базой LA-Б позволяют с такой же точностью определить ориентацию ствола 4, а пара датчиков А и В с базой LA-В позволяет с меньшей точностью определить или подтвердить (при неподвижном ТС или неизменном его курсе) ориентацию корпуса 1 (курсовой угол ТС). Последнее значение вновь может быть уточнено при возврате ствола 4 в исходное нулевое положение ϕ=0°.
В примере по фиг. 3, при значении угла ϕ=0° все четыре датчика - А, Б, В и Г (поз 6-9) расположены также в одной плоскости 2. Их координаты по GPS определяются. Как и в предыдущем примере по фиг. 2, база LБ-В максимально превышает базу пары корпусных датчиков и у прототипа для практически всех ТС, и даже в Системе по фиг. 1. Столь большая база (LБ-В) обусловливает еще более высокую точность определения положения ТС в пространстве и его ориентацию. При повернутом на тот или иной угол ϕ стволе 4, пара датчиков А и Б с базой LА-Б позволяет с точностью двух первых примеров определить ориентацию ствола 4, а пара датчиков В и Г с базой LB-Г позволяет с определить или подтвердить (при неподвижном ТС или неизменном его курсе) ориентацию корпуса 1 (курсовой угол ТС) с такой же точностью, как у прототипа, но существенно большей, чем в примере по фиг. 2. Последнее значение вновь может быть уточнено с максимально высокой точностью при возврате ствола 4 в исходное нулевое положение ϕ=0°.
В случае выхода из строя любых одного или двух датчиков из упомянутых четырех, остается возможность использовать по назначению две пары или одну пару соответственно. Разумеется, с некоторым проигрышем в точности. В этом смысле базы (пары) LA-Г и LБ-Г можно считать резервными, повышающими надежность Системы в целом.
Датчик Б, встроенный в дульный тормоз 5, лучше защищен (более благоприятные условия при вероятном взаимодействии ствола 4 с грунтом, растительностью и прочими препятствиями.
Таким образом, использование изобретения позволяет расширить технико-эксплуатационные или тактико-технические возможности системы контроля местонахождения и ориентации в пространстве транспортного средства (ТС) с артиллерийской установкой, за счет увеличения базы пары датчиков, увеличения вариантов попарного сочетания датчиков и дублирования.
Изобретение относится к области технических средств навигации танков и/или самоходных артиллерийских установок, с использованием спутниковой связи. Система контроля местонахождения и ориентации в пространстве транспортного средства с артиллерийской установкой, например танка, содержащая поворотную по азимуту относительно корпуса транспортного средства пушку, пространственно разнесенные по оси ствола пушки не менее двух средств спутниковой ориентации – первого А (6) и второго Б (7) соответственно, выходы средств спутниковой ориентации подключены к входам бортового компьютера, выход последнего выполнен с возможностью записи информации на носитель и передачи ее в пункт управления и контроля транспортного средства, при этом второе средство спутниковой ориентации установлено на стволе пушки. В системе также предусмотрено по меньшей мере третье средство В (8) спутниковой ориентации, которое установлено на корпусе транспортного средства. Средства А и Б установлены, соответственно, на оси поворота ствола (4) артиллерийской установки по азимуту и на конце ствола пушки (4). Дополнительно приведен пример с четырьмя средствами: А, Б, В и Г (поз. 6, 7, 8 и 9). Технический результат – расширение технико-эксплуатационных или тактико-технических возможностей системы контроля местонахождения и ориентации в пространстве транспортного средства (ТС) с артиллерийской установкой, за счет увеличения базы пары датчиков, увеличения вариантов попарного сочетания датчиков и дублирования. 5 з.п. ф-лы, 3 ил.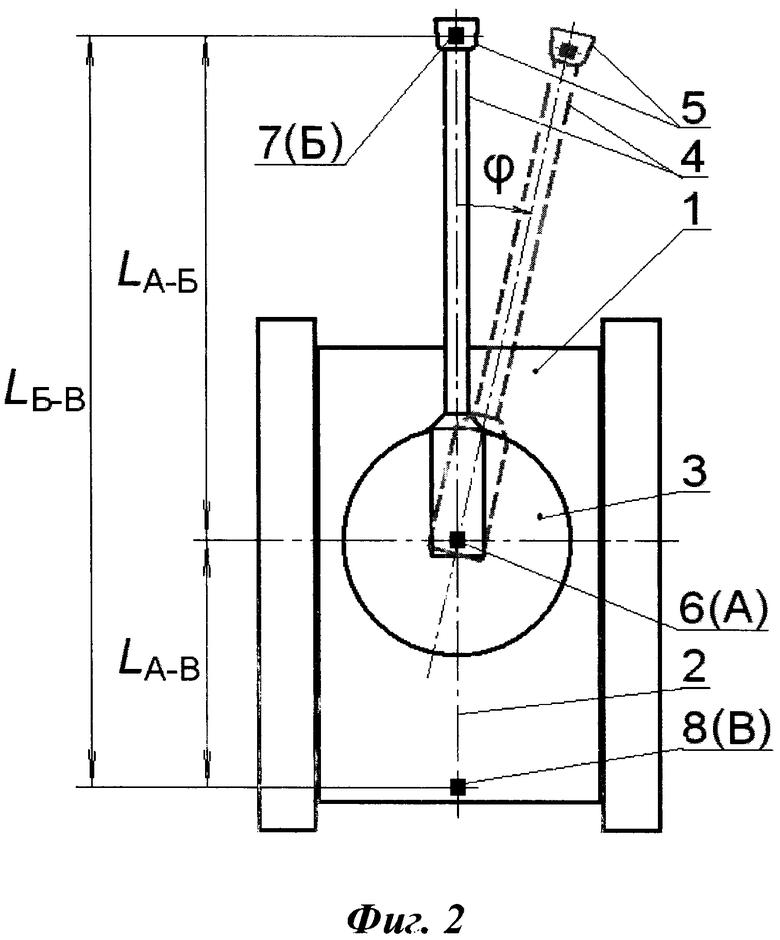
1. Система контроля местонахождения и ориентации в пространстве транспортного средства с артиллерийской установкой, например танка, содержащая поворотную по азимуту относительно корпуса транспортного средства пушку, пространственно разнесенные по оси ствола пушки не менее двух средств спутниковой ориентации - первого и второго соответственно, выходы средств спутниковой ориентации подключены к входам бортового компьютера, выход последнего выполнен с возможностью записи информации на носитель и передачи ее в пункт управления и контроля транспортного средства, при этом второе средство спутниковой ориентации установлено на стволе пушки, отличающаяся тем, что в ней предусмотрено по меньшей мере третье средство спутниковой ориентации, которое установлено на корпусе транспортного средства.
2. Система по п. 1, отличающаяся тем, что третье средство спутниковой ориентации установлено в продольной плоскости транспортного средства, проходящей через ось поворота ствола пушки по азимуту.
3. Система по п. 1, отличающаяся тем, что дополнительно предусмотрено по меньшей мере четвертое средство спутниковой ориентации, которое установлено в носовой части корпуса транспортного средства.
4. Система по п. 3, отличающаяся тем, что четвертое средство спутниковой ориентации установлено в продольной плоскости транспортного средства, проходящей через ось поворота ствола пушки по азимуту.
5. Система по п. 1, отличающаяся тем, что первое средство спутниковой ориентации установлено на оси поворота ствола пушки по азимуту.
6. Система по п. 1, отличающаяся тем, что второе средство спутниковой ориентации установлено на конце ствола пушки.
| Фасовочная машина | 1932 |
|
SU29139A1 |
| WO 1998012572 A1, 26.03.1998 | |||
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2013 |
|
RU2529649C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2008 |
|
RU2379700C1 |

