Настоящее изобретение относится к способу манипулирования материнскими рулонами на установках для конвертинга бумаги.
Известно, что производство бумажных логов предполагает подачу непрерывного бумажного полотна вдоль заданной траектории. Бумажное полотно перфорируют в поперечном направлении в заданном месте указанной траектории так, чтобы оно было разделено на листы заданной длины, разделяемые путем отрыва. Кроме того, используют трубчатые элементы (обычно называемые сердечниками/втулками/гильзами), на поверхности которых наносят заданное количество клея для обеспечения возможности приклеивания первого листа лога, подлежащего формированию. Кроме того, используют намоточные валики, которые расположены и функционируют на станции формирования логов и которые вызывают вращение сердечника, на который наматывается бумага. Формирование лога заканчивается, когда заданное количество бумаги будет намотано на сердечник. После этого формируют другой лог. Когда формирование лога будет завершено, последний лист лога должен быть приклеен к расположенному под ним листу для избежания самопроизвольного разматывания лога. После этого каждый лог разделяют на множество более коротких рулонов посредством отрезных машин.
Для обеспечения возможности надлежащего выполнения процесса установка для конвертинга бумаги всегда содержит раскат, на котором размещают материнские рулоны, с которых подают бумажное полотно. Раскаты содержат, в частности, основание для обеспечения опоры для каждого материнского рулона, и последний может вращаться вокруг его продольной оси, поскольку он присоединен к двум опорным фиксаторам, каждый из которых вставлен с возможностью удаления на соответствующей стороне материнского рулона. При размотке бумаги материнский рулон находится на основании раската, и фиксаторы находятся внутри материнского рулона, при этом, как правило, когда материнский рулон будет почти израсходован и должен быть заменен, фиксаторы извлекают для его освобождения. В завершение, установка для конвертинга бумаги обычно содержит мостовой кран, посредством которого материнский рулон перемещают из места временного хранения к раскату.
Основная задача настоящего изобретения состоит в том, чтобы предложить способ манипулирования материнскими рулонами, который является особенно эффективным и в то же время безопасным и характеризуется высоким уровнем автоматизации.
Данный результат достигается в соответствии с настоящим изобретением посредством способа, имеющего признаки, указанные в пункте 1 формулы изобретения. Другие признаки настоящего изобретения являются предметом зависимых пунктов формулы изобретения.
Способ в соответствии с настоящим изобретением обеспечивает преимущество, заключающееся в том, что этапы перемещения материнских рулонов сделаны более безопасными и эффективными, автоматизируемыми и управляемыми сравнительно простым и экономичным образом.
Эти и другие преимущества и признаки данного изобретения будут наилучшим образом поняты любым специалистом в данной области техники благодаря нижеприведенному описанию и приложенным чертежам, которые представлены в качестве примера, но не должны рассматриваться в ограничивающем смысле, на которых:
- фиг.1 представляет собой схематический вид сбоку устройства для обеспечения опоры для материнских рулонов на установке, выполненной с возможностью осуществления способа в соответствии с настоящим изобретением, с материнским рулоном на указанном опорном устройстве;
- фиг.2 представляет собой схематический вид сбоку устройства, показанного на фиг.1;
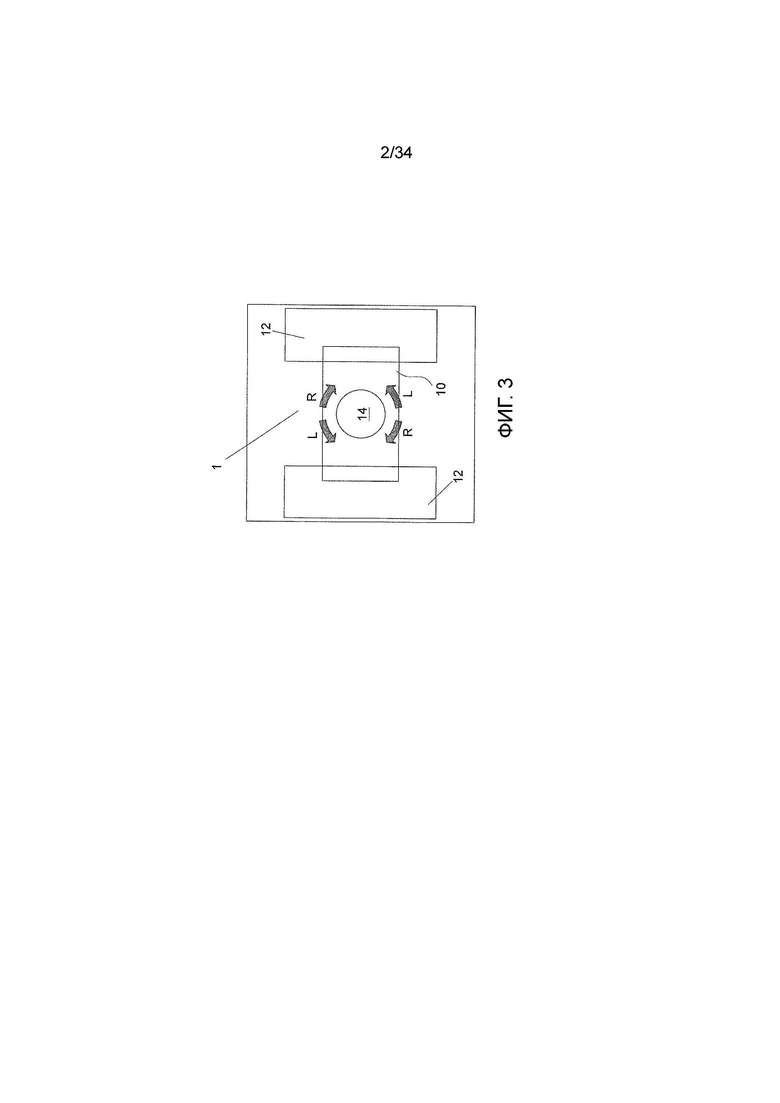
- фиг.3 представляет собой схематический вид снизу устройства, показанного на фиг.1 и 2;
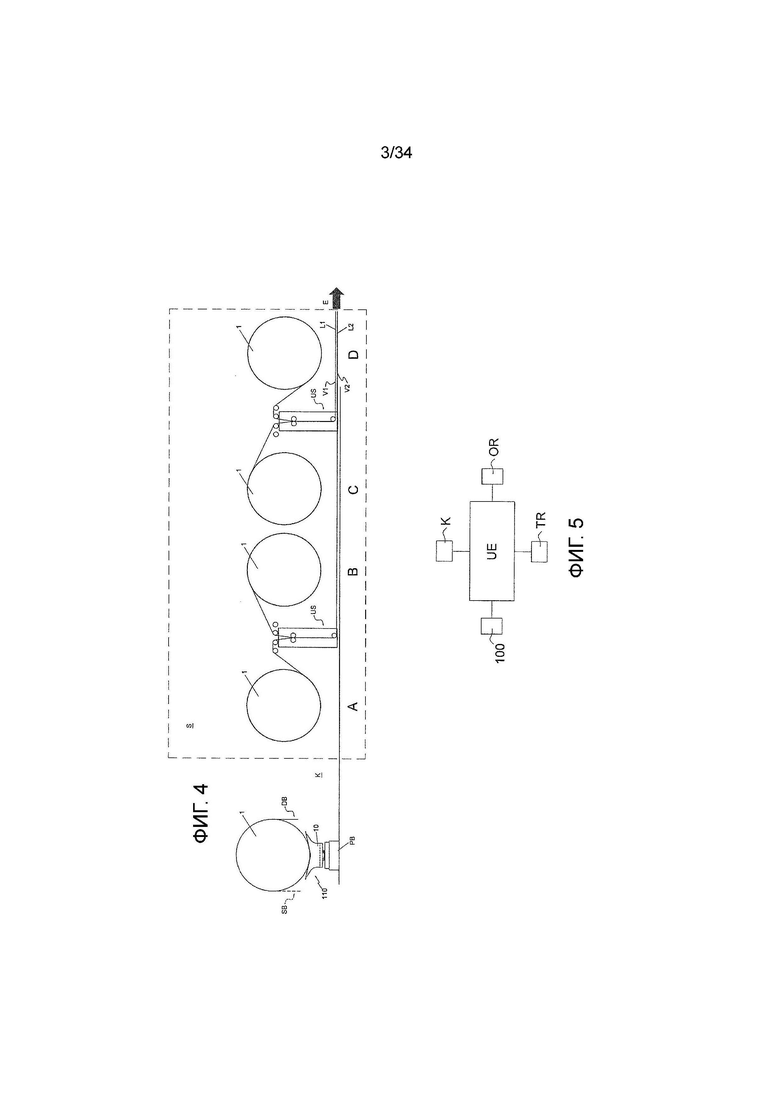
- фиг.4 схематически показывает положение указанного устройства относительно раската (S) основной установки для конвертинга бумаги, имеющей четыре позиции (А, В, С, D) для материнских рулонов (1), подлежащих размотке, и два устройства (SU) для смены;
- фиг.5 представляет собой упрощенную блок-схему, относящуюся к возможной конфигурации системы автоматического управления, предназначенной для устройства, показанного на фиг.1-4;
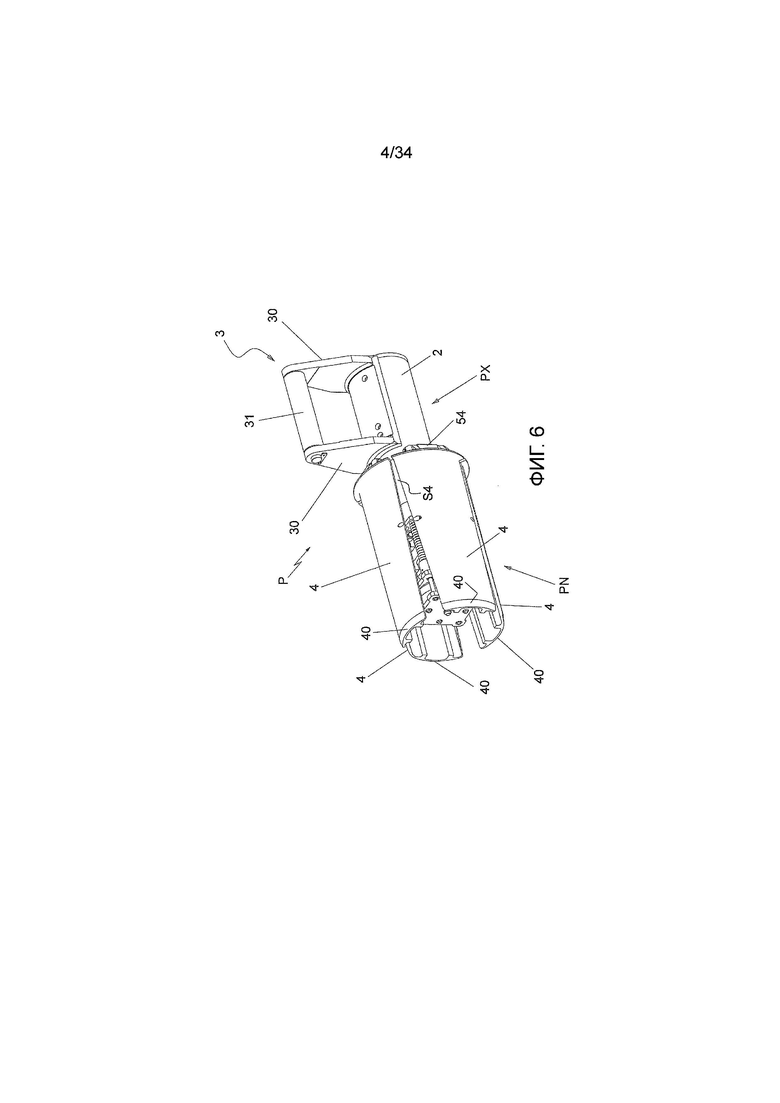
- фиг.6 представляет собой схематический вид в перспективе фиксатора, который может быть использован для осуществления способа в соответствии с настоящим изобретением;
- фиг.7 показывает фиксатор по фиг.6 с двумя секторами, удаленным, чтобы лучше показать внутреннюю часть;
- фиг.8 представляет собой поперечное сечение фиксатора, показанного на фиг.6;
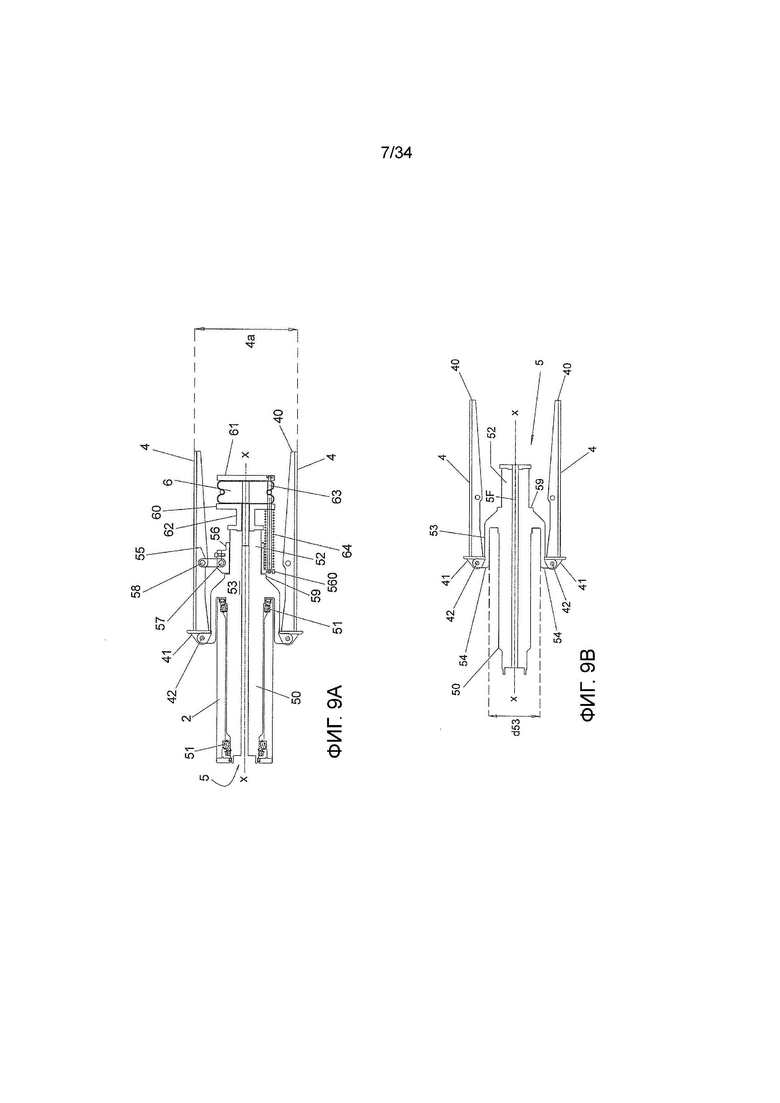
- фиг.9А представляет собой разрез, выполненный по линии А-А на фиг.8;
- фиг.9В показывает группу компонентов, отделенных от узла, показанного на фиг.9А;
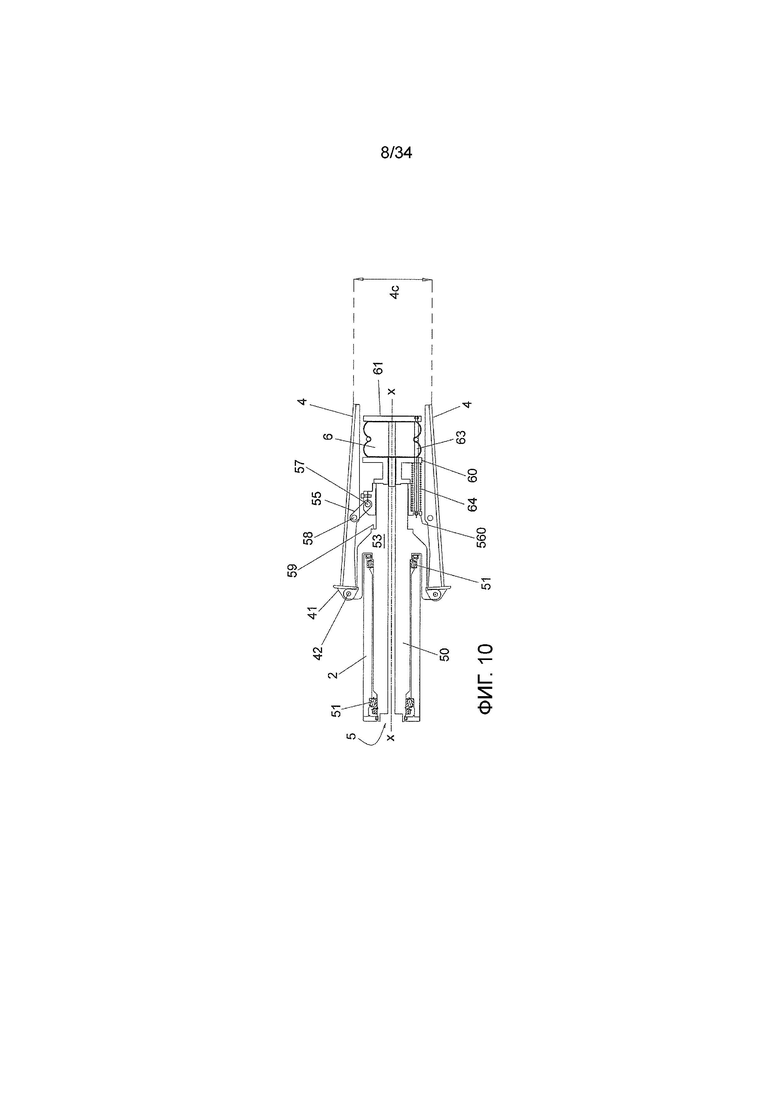
- фиг.10 представляет собой вид, аналогичный фиг.9А, но показывает фиксатор в сжатой конфигурации вместо расширенной конфигурации;
- фиг.11-16 схематически показывают последовательность этапов, относящихся к манипулированию фиксатором посредством мостового крана, при этом материнский рулон показан только на фиг.11 для более наглядной иллюстрации перемещений;
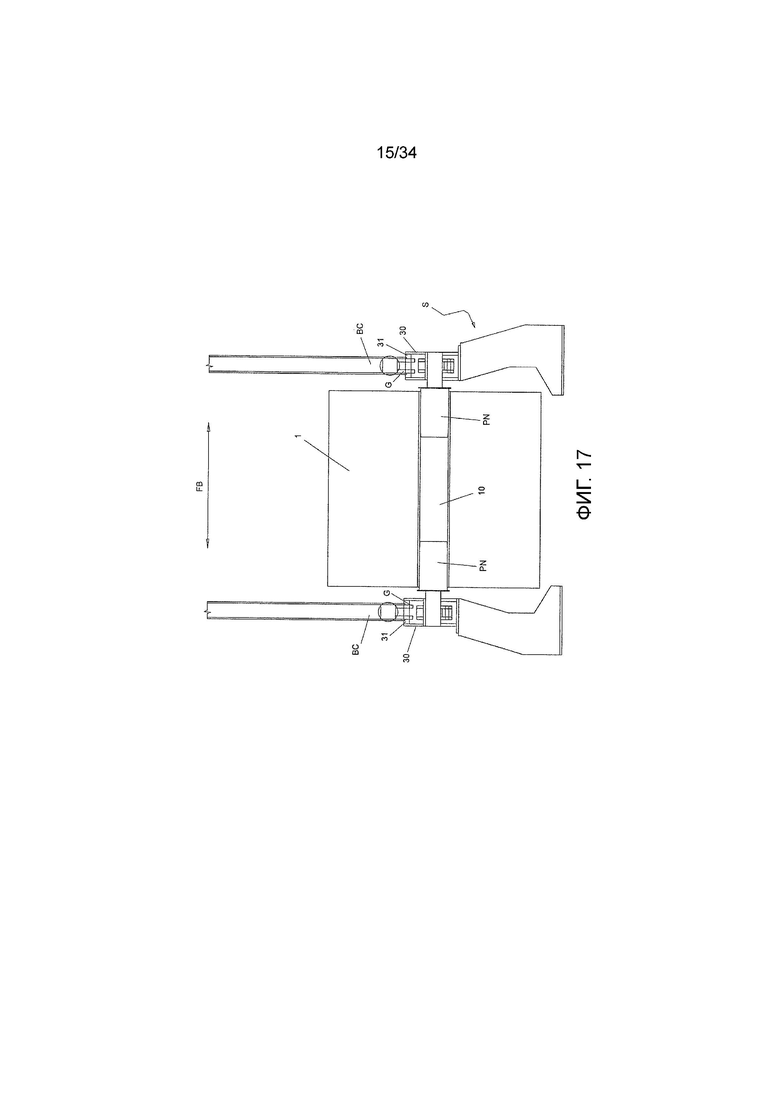
- фиг.17 представляет собой схематический вид сбоку материнского рулона с фиксаторами, вставленными в противоположные концы соответствующего сердечника;
- фиг.18 и 19 представляют собой два фрагмента фиг.11;
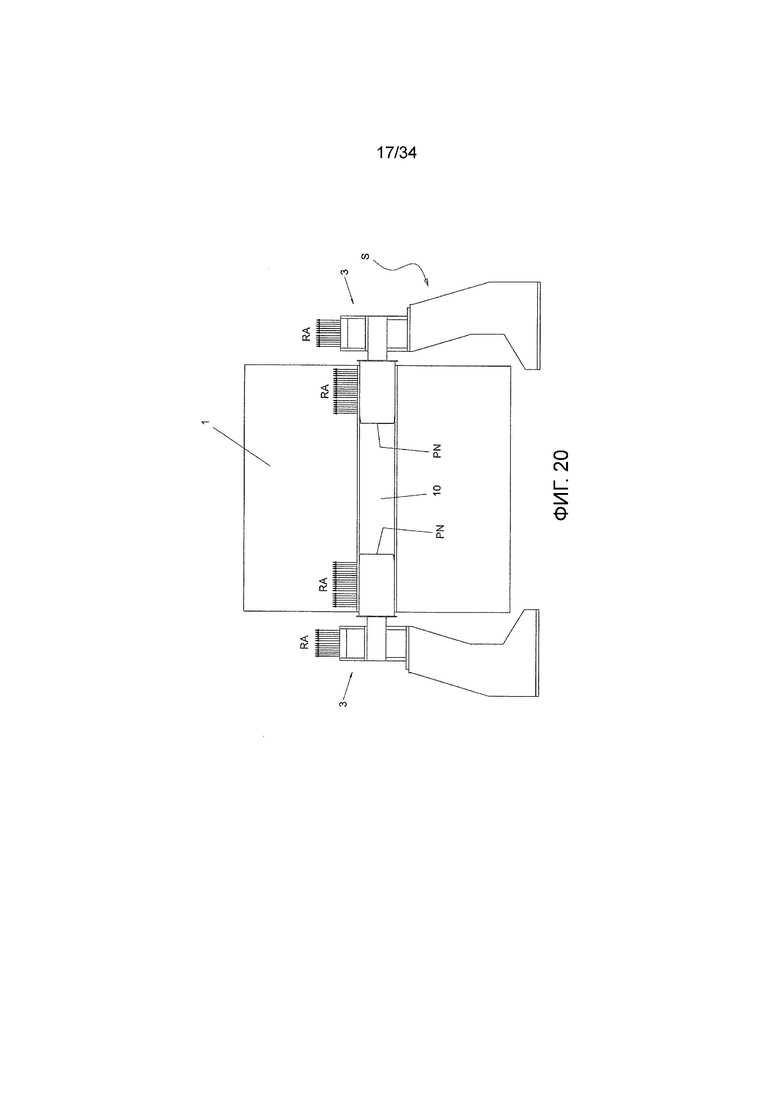
- фиг.20 показывает силы (RA), действующие на материнский рулон (А) при подъеме последнего;
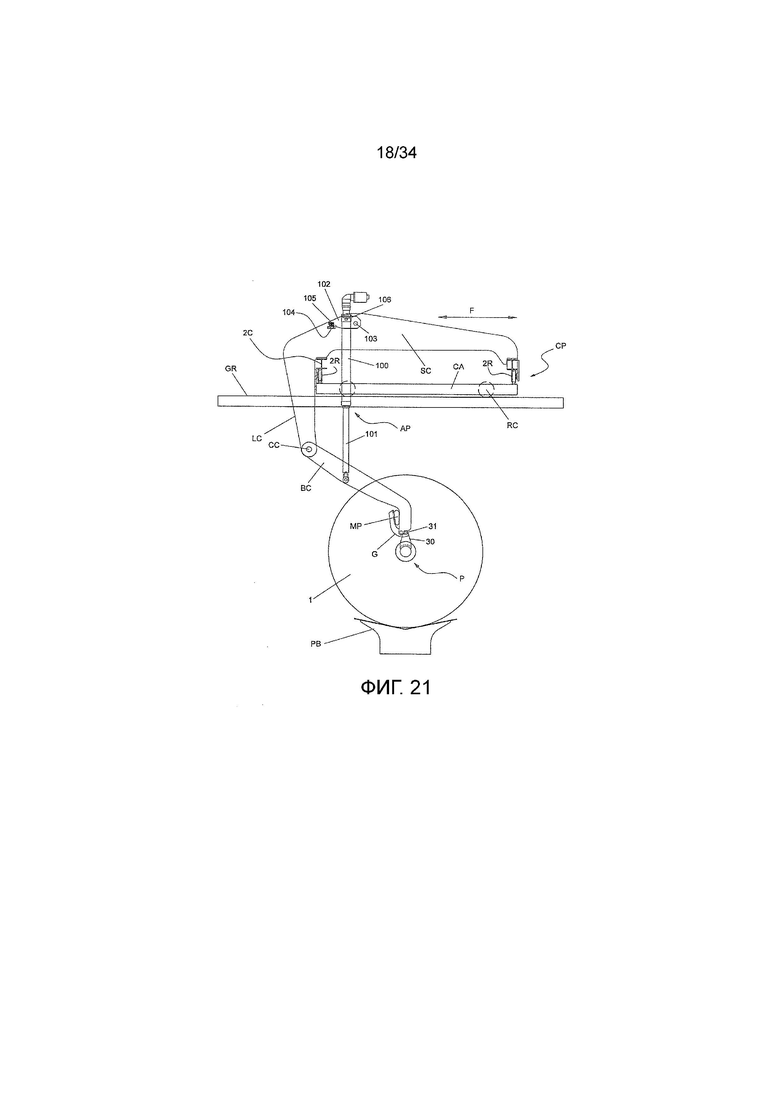
- фиг.21 схематически показывает вид сбоку мостового крана с концами соответствующих рычагов, выровненными надлежащим образом относительно продольной оси материнского рулона, размещенного на опоре;
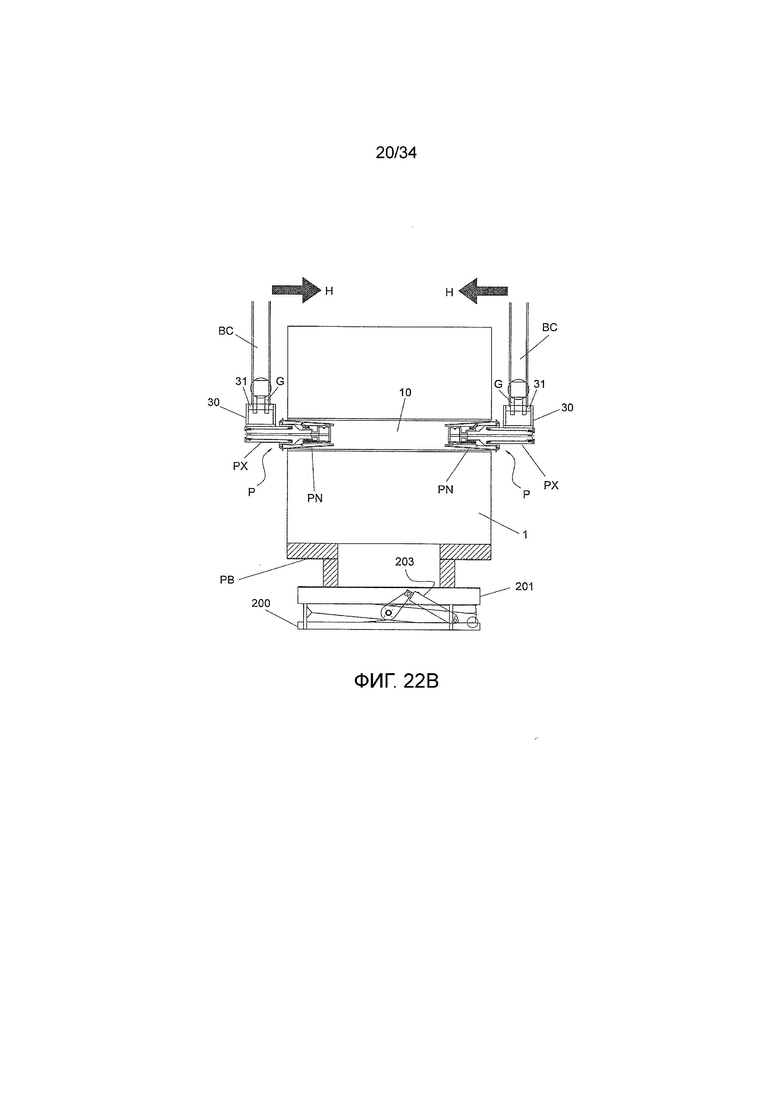
- фиг.22А и 22В показывают группу по фиг.21 на виде спереди в двух разных конфигурациях;
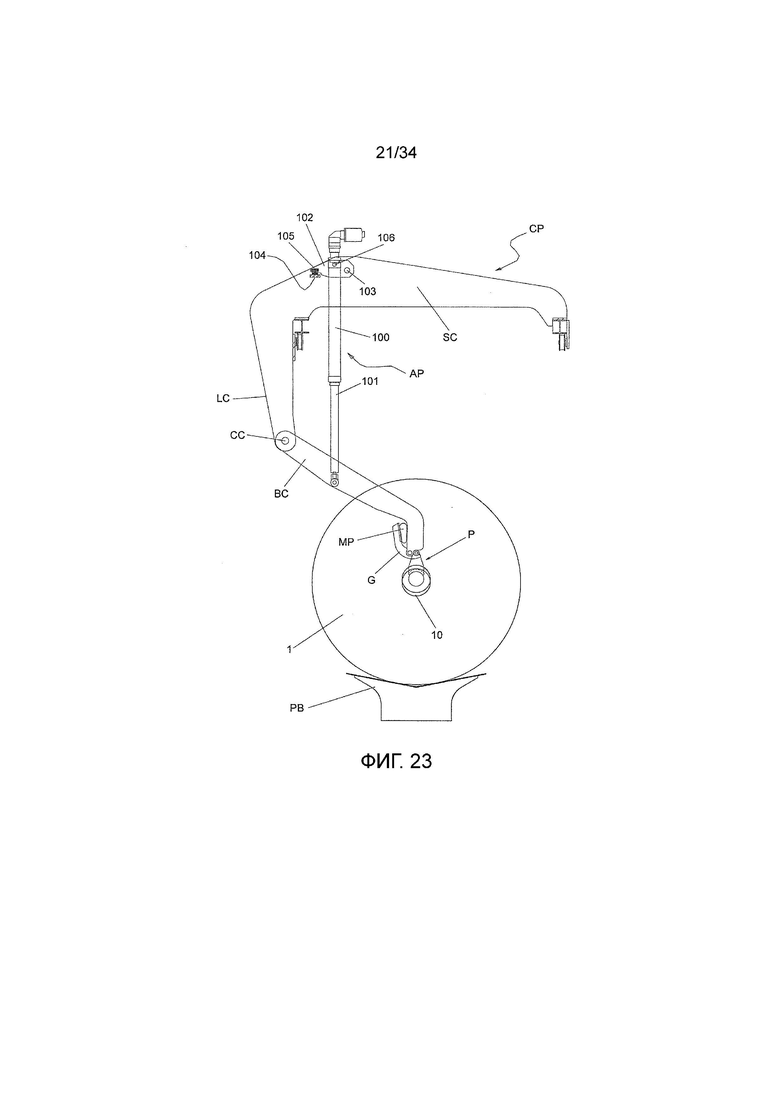
- фиг.23 представляет собой схематический вид сбоку мостового крана с концами соответствующих рычагов, расположенными выше продольной оси материнского рулона;
- фиг.24 показывает группу по фиг.23 на виде спереди;
- фиг.25 представляет собой схематический вид сбоку мостового крана с концами соответствующих рычагов, расположенными ниже продольной оси материнского рулона;
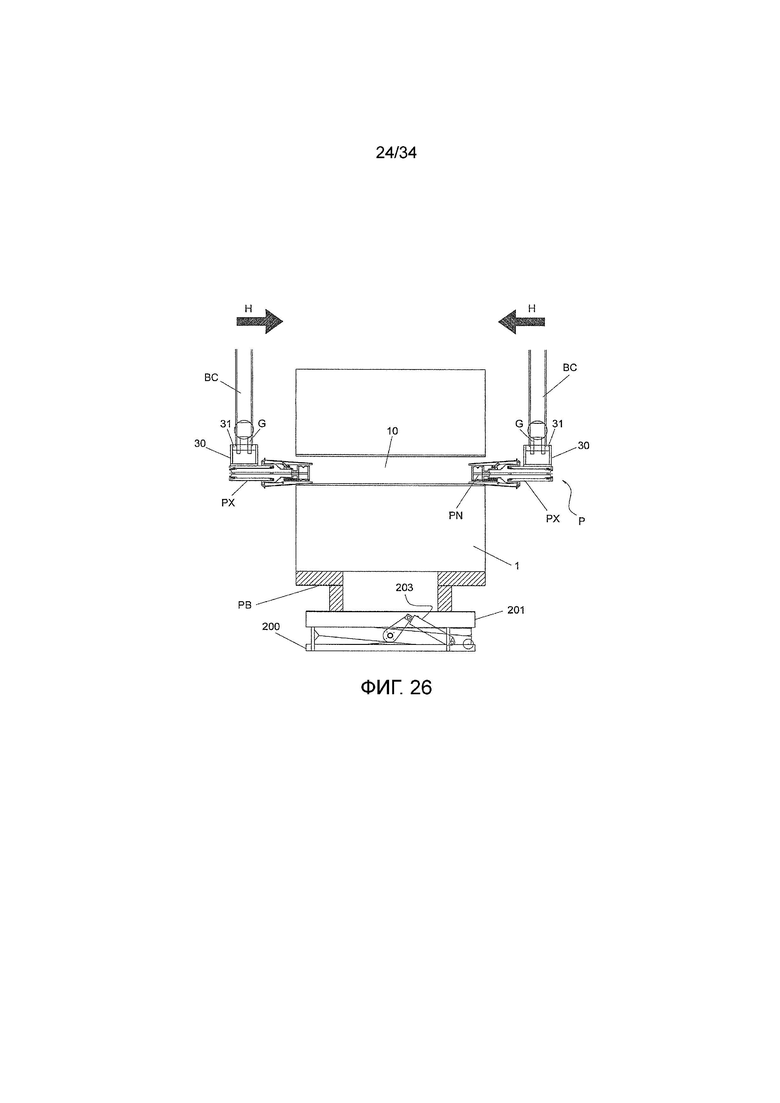
- фиг.26 показывает группу по фиг.25 на виде спереди;
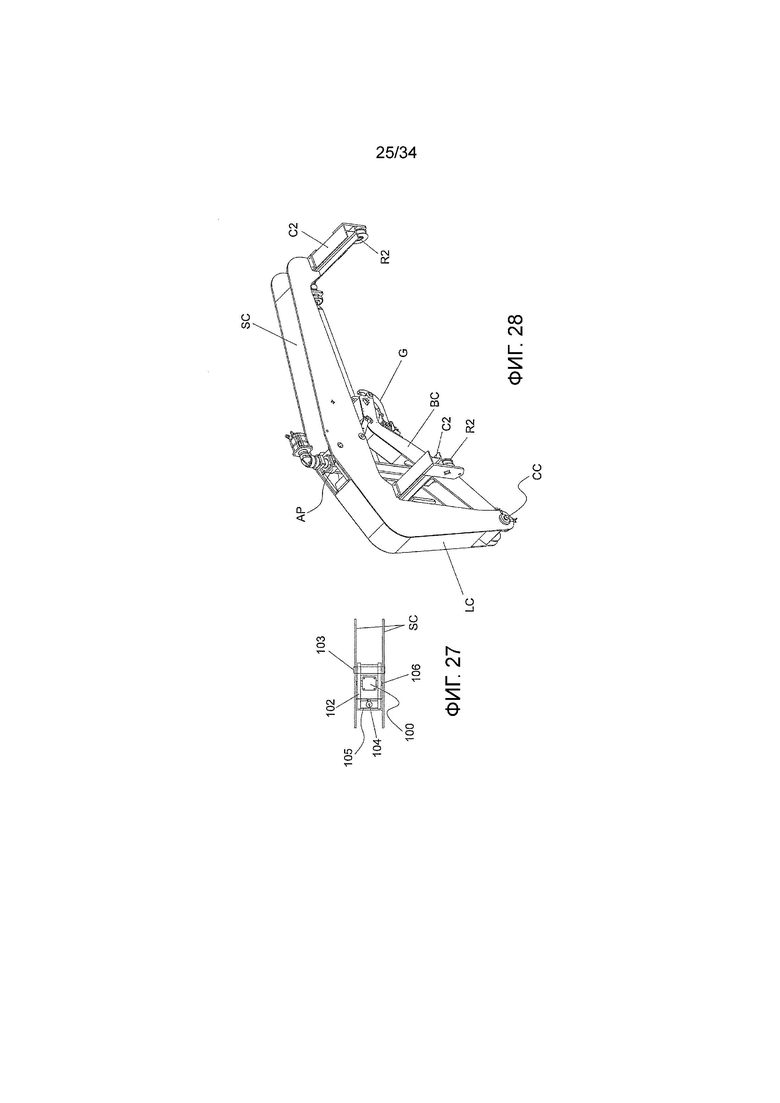
- фиг.27 представляет собой схематический вид сверху исполнительного механизма (АР) и его соединения с соответствующей верхней конструкцией (SC);
- фиг.28 представляет собой вид в перспективе рычага мостового крана с его верхней конструкцией;
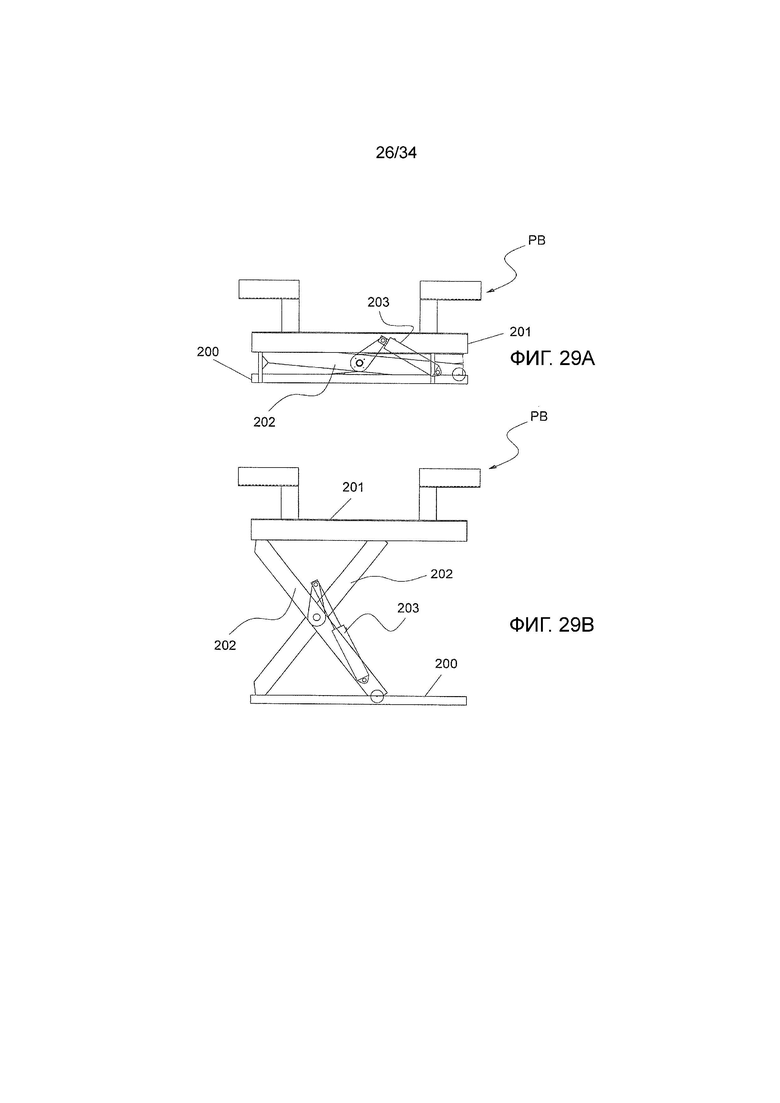
- фиг.29А и 29В схематически показывают платформу (РВ) в опущенном и соответственно поднятом положениях;
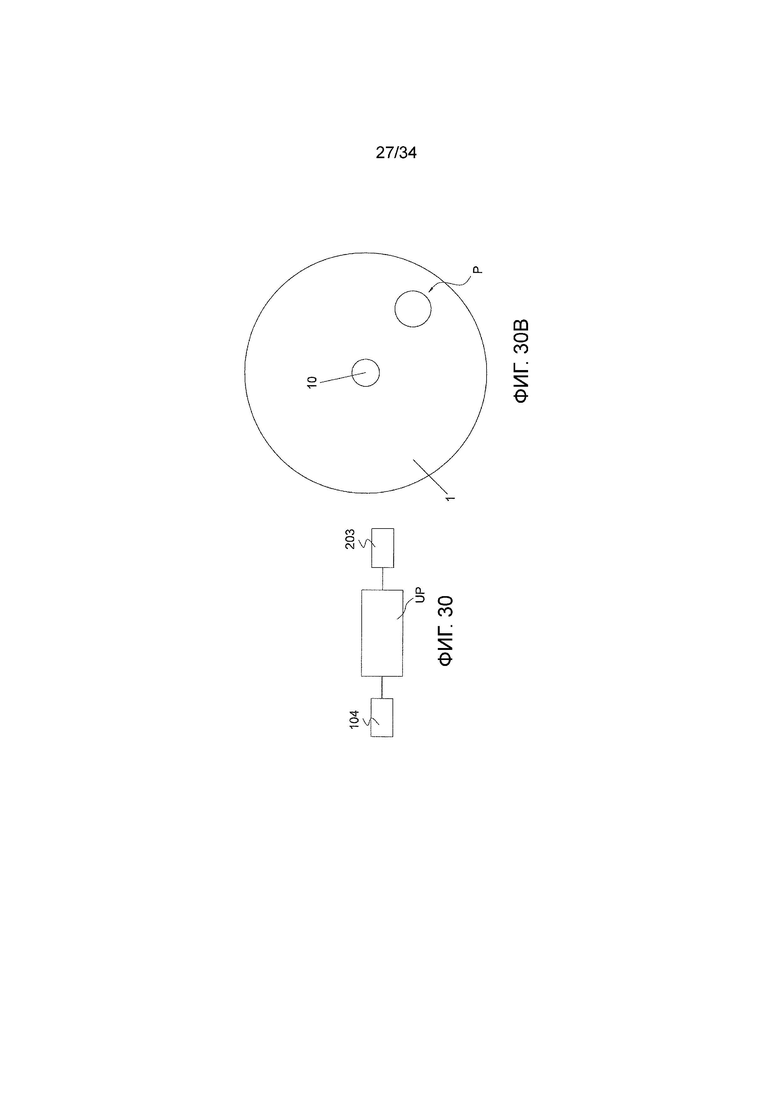
- фиг.30 представляет собой блок-схему возможной системы автоматического управления, которая может быть использована вместе с устройством, показанными на фиг.21-29;
- фиг.30В показывает неправильное положение фиксатора относительно материнского рулона;
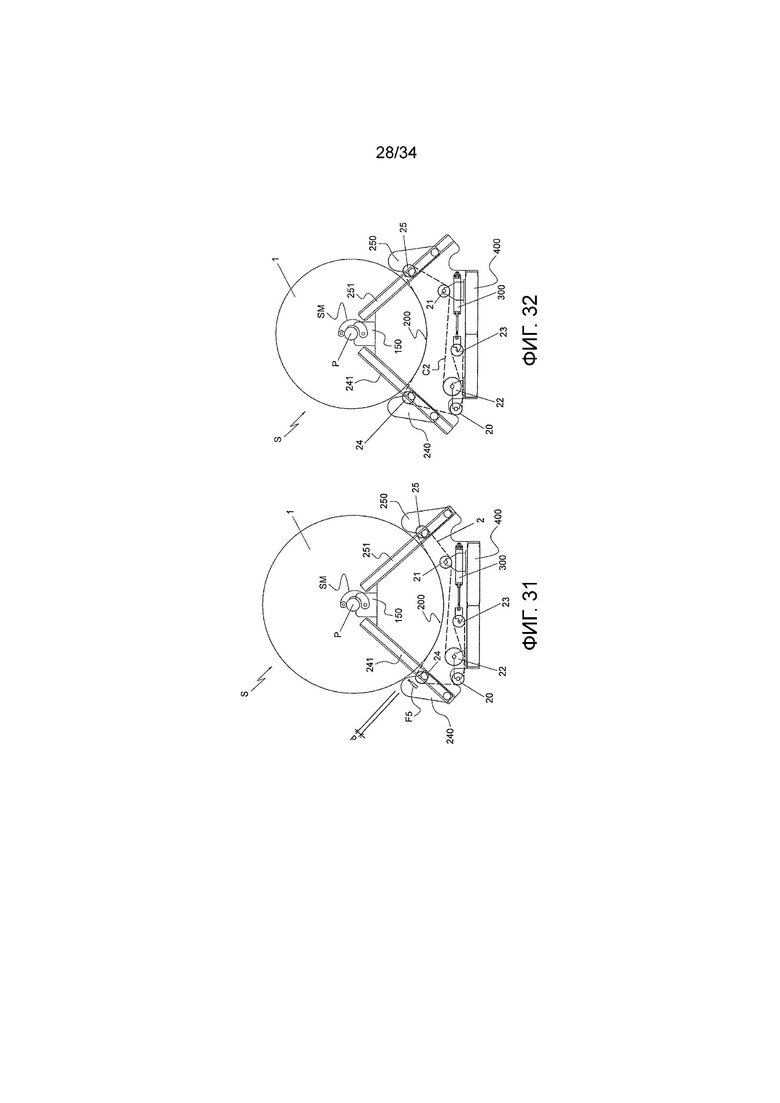
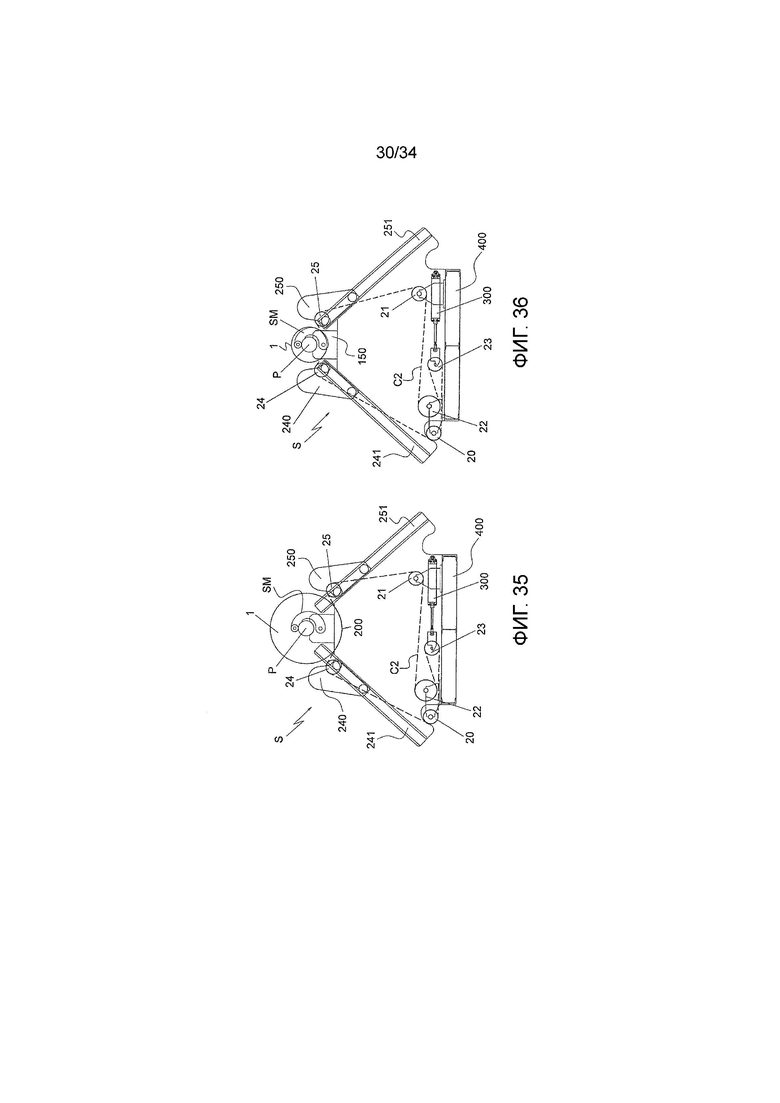
- фиг.31-36 схематически показывают на виде сбоку раскат, который может быть использован для осуществления способа в соответствии с настоящим изобретением, при последовательности конфигураций от начального момента времени, когда диаметр материнского рулона является максимальным (фиг.31), до конечного момента времени, когда диаметр материнского рулона является минимальным (фиг.36);
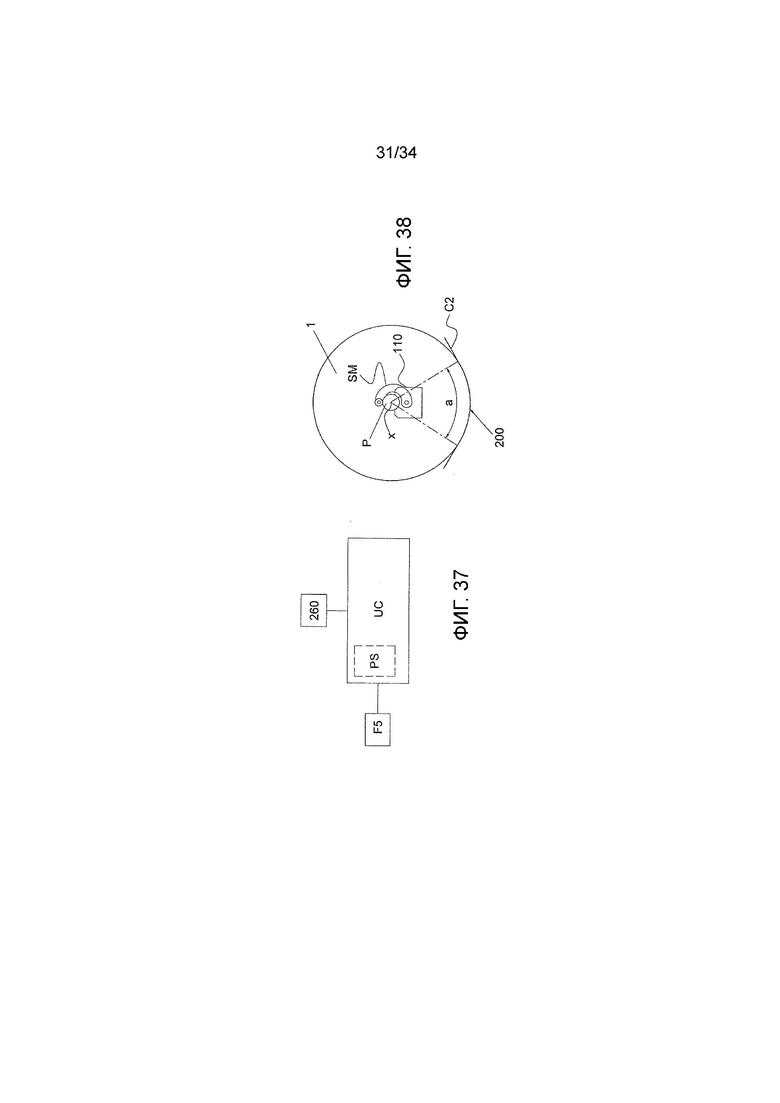
- фиг.37 схематически показывает упрощенную блок-схему, относящуюся к перемещению кареток, обеспечивающих опору для следящих элементов, имеющих форму шкивов;
- фиг.38 представляет собой увеличенный фрагмент фиг.33;
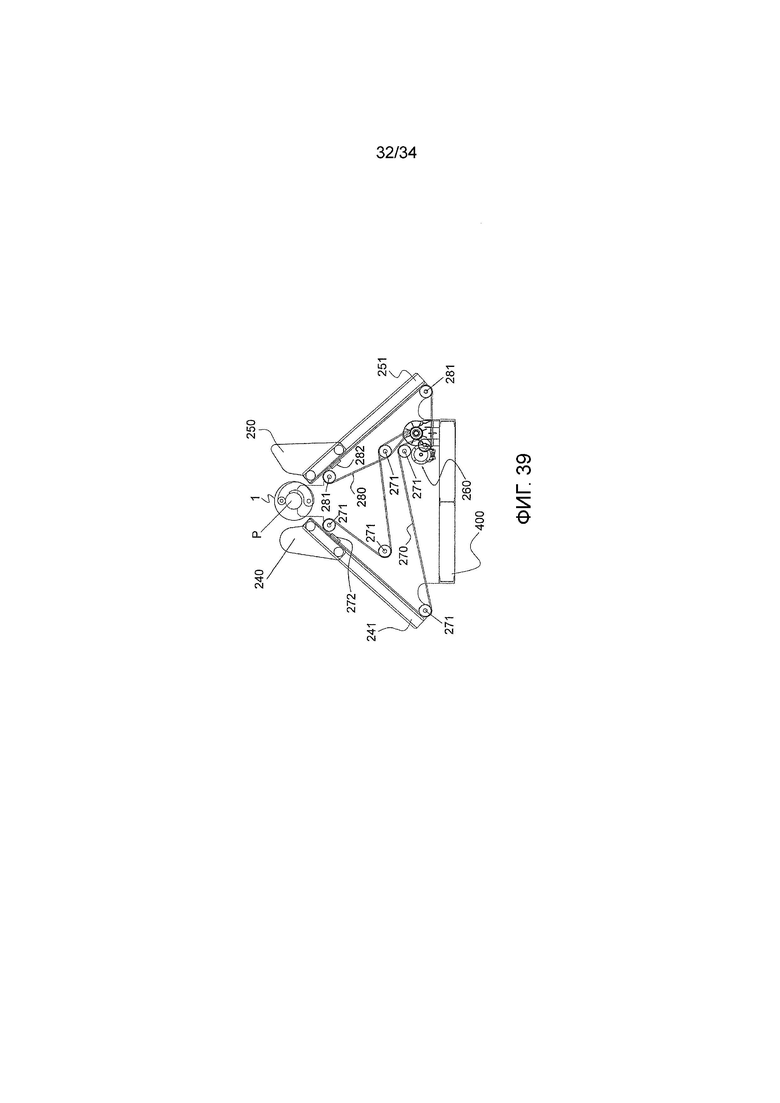
- фиг.39 представляет собой вид, аналогичный фиг.36, но иллюстрирует, в частности, возможный механизм для перемещения кареток (240, 250);
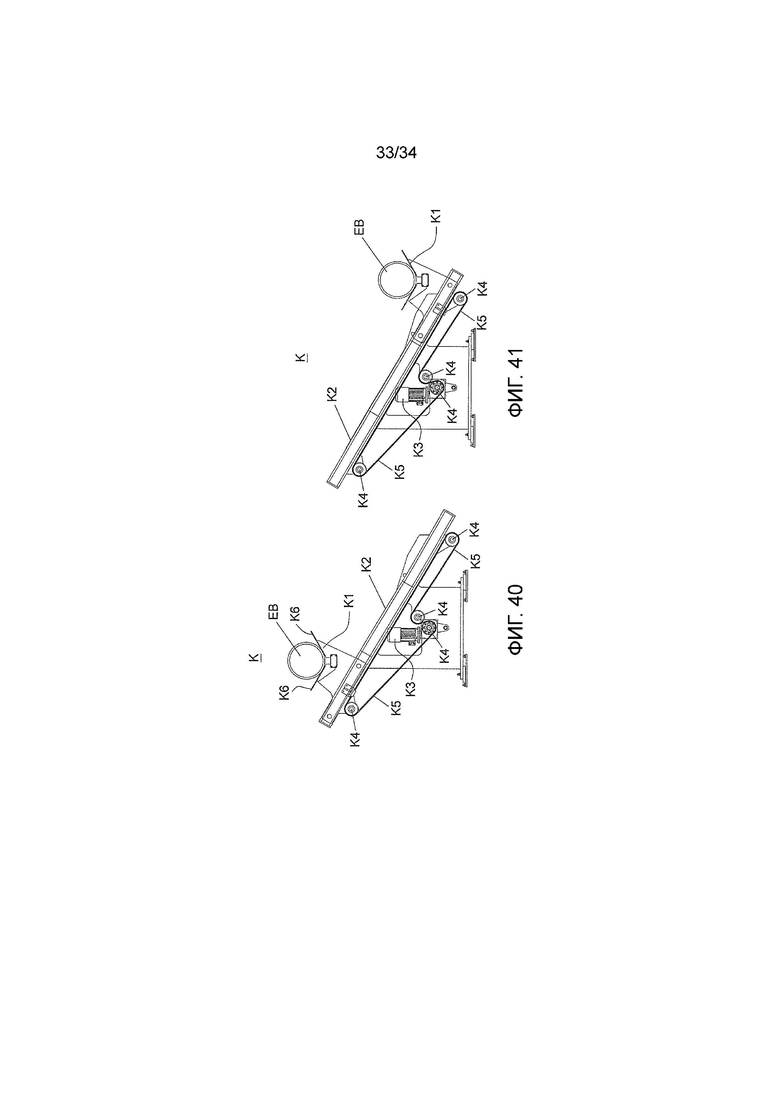
- фиг.40 и 41 представляют собой виды сбоку устройства для приема сработанных рулонов;
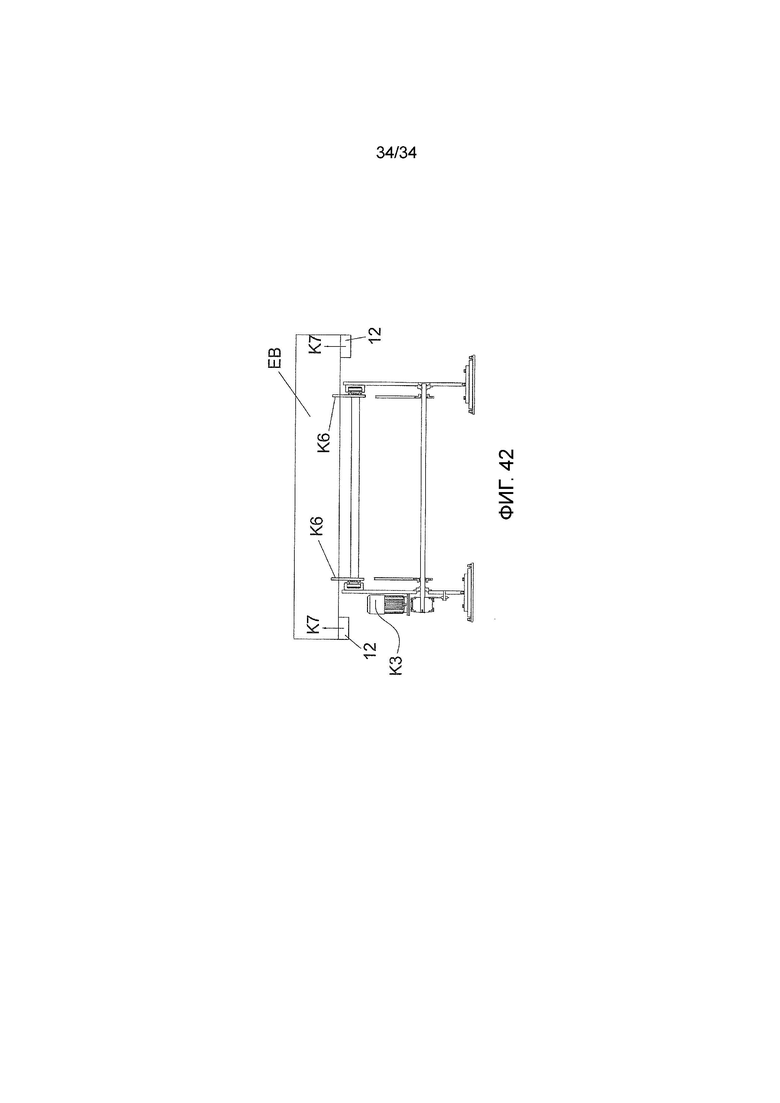
- фиг.42 представляет собой вид спереди устройства, показанного на фиг.40 и 41.
Способ в соответствии с настоящим изобретением может быть выполнен, например, посредством установки, содержащей:
- устройство, предназначенное для обеспечения опоры и ориентирования материнских рулонов (1) на станции (SA) промежуточного хранения;
- два фиксатора (Р), каждый из которых может быть вставлен в соответствующий конец сердечника (10) материнского рулона (1);
- мостовой кран (СР), имеющий два подвижных рычага (ВС);
- раскат (S).
Например, указанное опорное и ориентирующее устройство для материнских рулонов (1) содержит опору (110), выполненную с возможностью приема материнского рулона (1) и обеспечения опоры для материнского рулона (1), образованного из бумаги, намотанной в соответствии с заданным направлением намотки, при этом бумага имеет одну сторону, более гладкую, чем другая сторона, и обращенную к внутренней стороне или к наружной стороне материнского рулона. Указанная опора (110) содержит основание (11), на котором смонтирована поворотная платформа (10), выполненная с выступами (12), которые образуют двухстороннюю опору для материнского рулона (1). Указанные выступы (12) имеют сечение, имеющее форму перевернутой буквы ʺLʺ, для ограничения внутреннего пространства (13), доступного для вильчатых захватов вильчатого погрузчика (не показанного на чертежах), посредством которого материнский рулон (1), поступающий из другого места установки для конвертинга бумаги, в которой размещено опорное и ориентирующее устройство, или поступающий с «внешнего» предприятия/оборудования, позиционируют на поворотной платформе (10). Платформа (10) смонтирована на основании (11) посредством кольца (14) так, что платформа (10) может поворачиваться на основании (11) вокруг вертикальной оси (y-y), относительно которой сцентрировано кольцо (14). Платформа (10) приводится во вращательное движение посредством электрического мотора-редуктора (100), воздействующего на платформу (10) через зубчатую передачу, содержащую шестерню (101), которая входит в зацепление с внешней стороной кольца (14), при этом последнее соответственно выполнено зубчатым на его наружной стороне. Мотор-редуктор (100) смонтирован под основанием (11), и его выходной вал (102) проходит ортогонально через то же самое основание (11), которое имеет соответствующее сквозное отверстие; с другой стороны основания (11), то есть над ним, шестерня (101) смонтирована на свободном конце указанного вала.
На практике благодаря опоре (110) материнский рулон (1) может быть повернут вокруг оси (y-y) для обеспечения его надлежащей ориентации относительно раската (S).
На фиг.3 стрелки ʺRʺ и ʺLʺ показывают поворот материнского рулона (1) вокруг оси (y-y).
Например, как показано на фиг.4, если более гладкая сторона материнского рулона (1) представляет собой наружную сторону и «свободный хвостовой участок» того же самого материнского рулона (1) представляет собой правый хвостовой участок (DB), повернутый к раскату (S): если материнский рулон (1) предназначен для позиции (С) или для позиции (D), то материнский рулон (1) оставляют в его исходной ориентации; если материнский рулон (1) предназначен для позиции (А) или для позиции (В), то его ориентацию изменяют посредством поворота платформы (10) на 180° вокруг оси (y-y). Если - предполагая снова, что более гладкая сторона бумаги, намотанной на материнский рулон (1), представляет собой внешнюю сторону, - свободный хвостовой участок бумажного рулона (1) представляет собой левый хвостовой участок (SB): если материнский рулон (1) предназначен для позиции (А) или для позиции (В), то материнский рулон (1) оставляют в его исходной ориентации; если материнский рулон (1) предназначен для позиции (С) или для позиции (D), то его ориентацию изменяют посредством поворота платформы (10) на 180° вокруг оси (y-y).
Устройства (US) для смены известны сами по себе и предназначены для соединения концевой части почти сработанного/израсходованного материнского рулона с начальной частью другого материнского рулона, предусмотренного с противоположной стороны устройства для смены. Примеры раскатов, взаимодействующих с устройствами для смены, раскрыты в ЕР1742860 и ЕР1601600.
Устройство для ориентирования материнского рулона (1), раскрытое выше, гарантирует то, что более гладкая сторона бумаги будет представлять собой наружную сторону изделия, полученного соединением (известными способами) слоев, выходящих из устройства (S) для смены. На фиг.4 наружные стороны двух слоев (V1, V2), выходящих из устройства (S) для смены, обозначены ссылочными позициями ʺL1ʺ и ʺL2ʺ. Стрелка ʺEʺ показывает направление слоев (V1, V2), выходящих из устройства (S) для смены и направленных к соединительному устройству, расположенному дальше по ходу (которое само по себе известно и, следовательно, не описано подробно; например, указанное устройство может представлять собой клеемазальное устройство или устройство для соединения слоев).
Ориентация материнского рулона (1) в исходном положении/позиции промежуточного хранения распознается оператором, который, используя клавиатуру (К), вводит данную информацию в программируемое устройство (UE), с которым соединен мотор-редуктор (100). После этого программируемое устройство (U) обеспечивает приведение платформы (10) во вращательное движение или нет на основе ориентации материнского рулона (1), введенной оператором, и на основе места назначения (А, В, С, D), как раскрыто ранее.
Управление этапом определения ориентации материнского рулона может осуществляться посредством средства автоматического распознавания, выполненного с возможностью определения того, является ли более гладкая сторона бумаги, намотанной на материнский рулон (1), наружной или внутренней стороной.
Например, указанное средство автоматического распознавания содержит оптическое считывающее устройство (OR) или считывающее устройство (TR), выполненное с возможностью считывания меток радиочастотной идентификации. В первом случае на наружную сторону концевой части материнского рулона (1) нанесен знак (например, геометрическая конфигурация или штриховой код), который может быть распознан оптическим считывающим устройством (OR) и который идентифицирует такую сторону, как более гладкую или более шероховатую сторону. Во втором случае метка радиочастотной идентификации нанесена на концевой участок материнского рулона и имеет такую же функцию, какая раскрыта для геометрической формы и штрихового кода. Знак или штриховой код, или метка радиочастотной идентификации может быть предусмотрен/выполнен(-а) на рулоне на целлюлозно-бумажном предприятии, на котором рулон изготавливают, или в установке для конвертинга бумаги.
Клавиатура (К), оптическое считывающее устройство (OR) и устройство считывания меток представляют собой пример средств, разрешающих приведение в действие средства ориентации материнского рулона (1), и приводятся в действие в соответствии с разрешением, данным посредством клавиатуры (К), оптического считывающего устройства (OR) или устройства считывания меток.
Платформа (10) также может быть выполнена с конфигурацией, обеспечивающей возможность одновременного размещения более одного материнского рулона (1).
В соответствии с примерами, показанными на чертежах, каждый фиксатор (Р) имеет наружную сторону (РХ) и внутреннюю сторону (PN), при этом внутренняя сторона (PN) предназначена для вставки в сердечник (10) рулона (1) и наружная сторона является внешней по отношению к тому же самому рулону (1), когда внутренняя сторона (PN) находится внутри сердечника (10). На фиг.6 и фиг.7 наружная сторона (РХ) находится справа, в то время как внутренняя сторона (РN) находится слева. Фиксатор (Р) является по существу симметричным относительно центральной продольной оси (x-x).
Наружная сторона (РХ) фиксатора (Р) образована хвостовиком (2), продольная ось которого совпадает с продольной осью (x-x) фиксатора (Р). На указанном хвостовике (2) закреплена ручка (3), образованная двумя параллельными консольными элементами (30), выступающими в радиальном направлении от хвостовика (2) и соединенными элементом (31), параллельным указанной продольной оси (x-x). Ручка (3) применяется с верхней стороны хвостовика (2), то есть со стороны последнего, которая при эксплуатации повернута вверх. Хвостовик (2) является полым.
В соответствии с примером, показанным на чертежах, внутренняя сторона (PN) фиксатора (Р) является разжимной: указанная внутренняя сторона расширяется (как показано на фиг.6, фиг.7, фиг.8, фиг.9А и фиг.9В), когда она вставлена в сердечник (10) рулона (1), для входа в контактное взаимодействие с последним, при этом она сжимается (как показано на фиг.10) для ее вставки в сердечник (10) или вывода из контактного взаимодействия с рулоном.
Наружная поверхность внутренней стороны (PN) образована множеством секторов (4), число которых в данном примере составляет четыре, каждый из которых образован участком с цилиндрической поверхностью со свободным передним концом (40) и задним концом (41). Фиксатор (Р) также содержит элемент (5), имеющий: заднюю часть (50), вставленную в продольном направлении в полый хвостовик (2) при размещении подшипников (51) между ними; переднюю часть (52), обращенную к переднему концу (40) секторов (4) и состоящую из продольной выступающей части задней части (50), и наружную чашеобразную часть (53), внутренний диаметр (d53) которой превышает наружный диаметр хвостовика (2), в промежуточном месте между задней частью (50) и передней частью (52). На практике задняя часть (50) элемента (5) вставлена в хвостовик (2), промежуточная часть (53) является внешней по отношению к хвостовику, который частично (то есть в его наиболее выдвинутой вперед части) находится внутри чашеобразной промежуточной части (53), и передняя часть (52) образует продолжение элемента (5), которое, как показано на чертежах, является внутренним по отношению к секторам (4).
Задний конец (41) каждого сектора (4) удерживается относительно чашеобразной части (53) элемента (5) посредством стержня (42), вставленного в радиальный выступ (54), выступающий наружу от той же самой чашеобразной части (53). Число указанных выступов (54) в данном примере составляет четыре, и они расположены на угловом расстоянии, составляющим 90°, друг от друга. Ось каждого стержня (42) ориентирована вдоль направления по касательной относительно хвостовика (2), поверхность которого является цилиндрической. Кроме того, каждый стержень (42) расположен на заданном расстоянии от наружной поверхности хвостовика (2), когда стержень (42) вставлен в выступ (54), который функционирует в качестве дистанционирующего элемента.
В соответствии с примером, показанным на чертежах, секторы (4) идентичны друг другу и разделены линиями разделения или зонами (S4) разрыва непрерывности для обеспечения возможности их перемещения (как дополнительно описано ниже) без столкновений друг с другом. Кроме того, в примере каждый из секторов (4), если смотреть сверху, имеет трапециевидную форму с бóльшим основанием, соответствующим его задней стороне (41).
Каждый сектор (4) также удерживается относительно передней части (52) указанного элемента (5) посредством соединительной штанги (55), шарнирно присоединенной с одной стороны (нижней стороны) к втулке (56), установленной с возможностью скольжения в продольном направлении на передней части (52) элемента (5), и с противоположной стороны (верхней стороны) к внутренней поверхности соответствующего сектора (4). Соединение соединительной штанги (55) с втулкой (56) образовано стержнем (57), ось которого параллельна стержню (42), который соединяет заднюю часть (41) сектора (4) с соответствующим выступом (54) чашеобразной части (53); соединение той же самой соединительной штанги (55) с внутренней стороной сектора (4) выполнено посредством дополнительного стержня (58), параллельного предыдущему стержню (57).
Перед передним концом передней части (52) элемента (5) расположена пневматическая пружина (6), размещенная между двумя плитами (60, 61), которые ортогональны указанной оси (x-x). Первая плита (60) имеет заднюю выступающую часть (62), которая функционирует в качестве дистанционирующего элемента и прикреплена к переднему концу передней части (52) элемента (5). Вторая плита (61) находится с противоположной стороны по отношению к пневматической пружине (6). Несколько штанг (63) соединяют вторую плиту (61) с указанной втулкой (56): каждая штанга (63) прикреплена с одной стороны ко второй плите (61) и с противоположной стороны к заднему выступу (560) втулки (56) и проходит свободно через соответствующее отверстие, образованное в первой плите (60). На каждой из штанг (63) установлена цилиндрическая винтовая пружина (64). Штанги (63) и цилиндрические винтовые пружины (64) ориентированы параллельно указанной оси (x-x), и число стержней (63) составляет четыре в примере, показанном на чертежах.
Когда пневматическая пружина (6) «разгружена», то есть сжата, воздействие цилиндрических винтовых пружин (64) является таким, чтобы удерживать втулку (56) сдвинутой назад на части (52) элемента (5): в этом состоянии задняя часть втулки (56) поджимается пружинами (64) к опорной поверхности (59), имеющейся на элементе (5) между промежуточной частью (53) и передней частью (52), и секторы (4) открыты, при этом соединительные штанги (55) ориентированы вдоль радиального направления относительно оси (x-x), то есть ориентированы параллельно нагрузке, действующей на фиксатор (Р).
Секторы (4) удерживаются нормально открытыми посредством пружин (64).
При «нагружении», то есть расширении, пневматической пружины (6) обеспечивается преодоление сопротивления пружин (64), и втулка (56) перемещается вперед вместе с основанием соединительных штанг (55), в результате чего секторы (4) закрываются при взаимном сближении соответствующих передних концов (40).
Сжатый воздух вводится в пневматическую пружину (6) или удаляется через продольное сквозное отверстие (5F), образованное в элементе (5).
Таким образом, секторы (4) могут быть открыты и закрыты посредством их поворота вокруг стержней (42).
Следовательно, разжимной фиксатор в соответствии с примером, описанным выше, использует внешний источник энергии для переключения между расширенной конфигурацией и сжатой конфигурацией. В данном примере энергия, подаваемая извне, передается сжатым воздухом.
Передние концы (40) секторов (4) образуют по существу круглую конфигурацию, наружный диаметр (4а; 4с) которой изменяется в соответствии с конфигурацией (открытой/закрытой) тех же самых секторов (4) между максимальным значением (4а) и минимальным значением (4с).
Разность (Δ) указанного максимального значения (4а) и указанного минимального значения (4с) предпочтительно составляет от 10% до 30% от максимального значения (4а):
0,30*(4а)≥Δ=(4а-4с)≥0,10*(4а).
Указанная разность (Δ) предпочтительно составляет от 15% до 20% от максимального значения (4а):
0,20*(4а)≥Δ=(4а-4с)≥0,15*(4а).
Более предпочтительно, если указанная разность (Δ) составляет от 15% до 18% от максимального значения (4а):
0,18*(4а)≥Δ=(4а-4с)≥0,15*(4а).
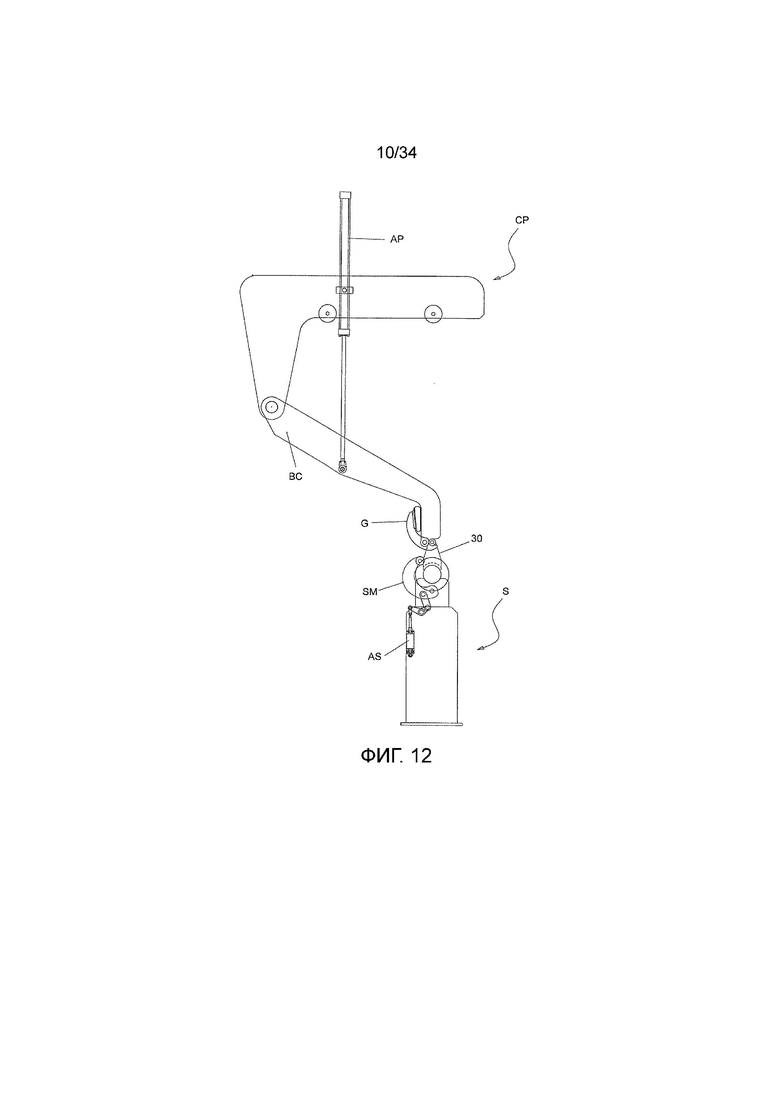
Фиг.11-16 показывают возможную последовательность движений, связанных с загрузкой материнского рулона (1) на раскат (S), предусмотренный на каждой из его сторон с подвижным полукольцом (SM), управление которым осуществляет посредством исполнительного механизма (AS), который - само по себе известным образом - посредством рычагов (LS) обеспечивает его поворот по часовой стрелке (в направлении закрытия) или против часовой стрелки (в направлении открытия) над неподвижной лотковой опорой (SF): когда фиксатор (Р) находится над лотковой опорой (SF), поворот подвижного полукольца (SM) в направлении по часовой стрелке вызывает вход наружной части (РХ) фиксатора (Р) в контактное взаимодействие с соответствующей стороной раската (S). Напротив, поворот подвижного полукольца (SM) в направлении против часовой стрелки определяет расфиксацию фиксатора (Р) относительно раската (S).
На фиг.11 материнский рулон (1) с фиксаторами (Р), вставленными в оба конца его сердечника (10), прицеплен к подвижным рычагам (ВС) мостового крана (СР), при этом подвижные полукольца (SM) раската (S) открыты. В частности, каждый подвижный рычаг (ВС) мостового крана (СР) снабжен на его свободном конце подвижным крюком (G), который, в свою очередь, имеет крюкообразный свободный конец для облегчения его размещения под элементом (31) ручки (3). Крюк (G) шарнирно присоединен на свободном конце указанного подвижного рычага (ВC) посредством стержня (PG) с горизонтальной осью и имеет заднюю сторону, соединенную с пневматической пружиной (МР), посредством которой тот же самый крюк (G) может быть повернут в направлении по часовой стрелке или против часовой стрелки вокруг стержня (PG). Управление перемещением подвижного рычага (ВС) осуществляется посредством соответствующего исполнительного механизма (АР).
На фиг.12 подвижный рычаг (ВC) мостового крана (СР) был опущен посредством исполнительного механизма (АP), фиксатор (Р) находится на лотковой опоре (SF) раската (S), крюк (G) удерживает ручку (3), и подвижные полукольца (SM) открыты.
На фиг.13 в то время, как крюк (G) по-прежнему удерживает ручку (3) фиксатора (Р), полукольца (SM) повернуты в направлении по часовой стрелке для фиксации фиксатора (Р) относительно раската (S).
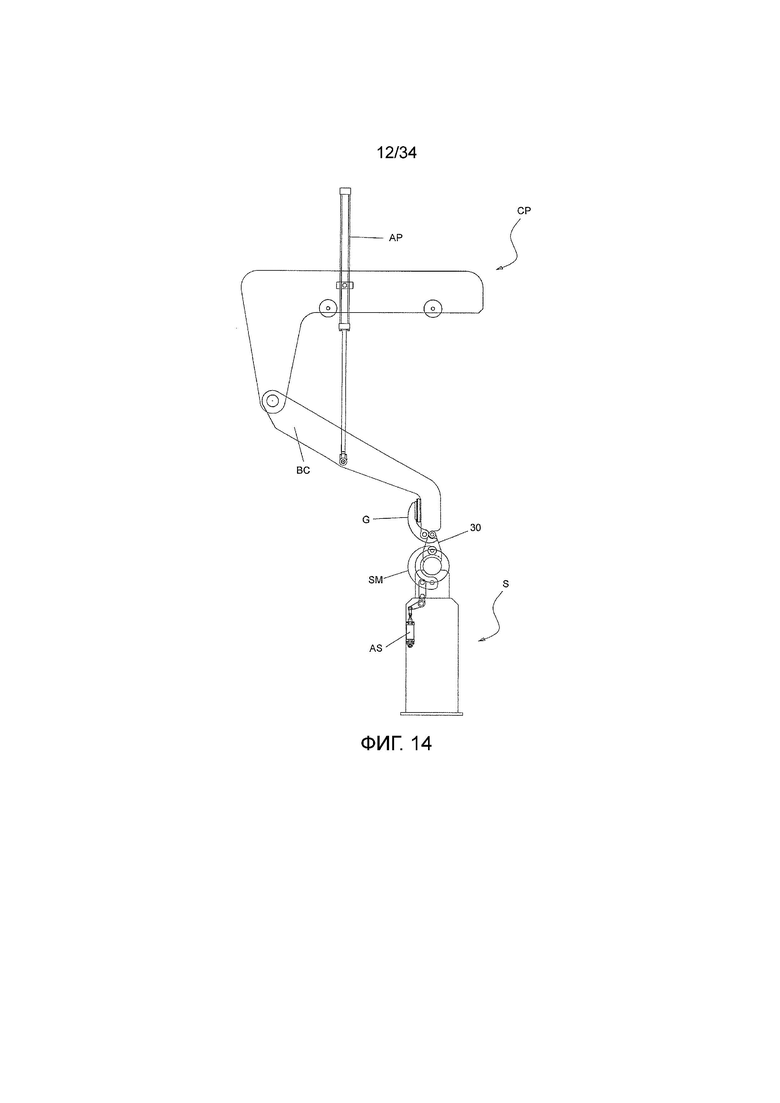
На фиг.14 крюк (G) мостового крана (СР) повернут для отсоединения его от ручки (3) фиксатора (Р).
Поскольку рычаги (ВС) мостового крана (СР) перемещаются для обеспечения их приближения друг к другу и удаления друг от друга, как схематически показано двунаправленной стрелкой ʺFBʺ на фиг.17, те же самые рычаги (ВС) могут обеспечить вставку фиксаторов (Р) в два конца сердечника (10) рулона (1) и соответственно их отсоединение.
Фиг.15 и фиг.16 показывают подвижный рычаг мостового крана, который перемещается от раската (S).
Для вывода рулона (1) с фиксаторами (Р) из контактного взаимодействия с раскатом (S) последовательность будет противоположной по отношению к описанной выше.
Как упомянуто ранее, ручка (3) на фиксаторе (Р) позволяет прицепить фиксатор (Р) к соответствующему рычагу мостового крана, пока тот же самый фиксатор (Р) по-прежнему находится на раскате (S).
Следует отметить, что рулон всегда опирается на рычаги (ВС) мостового крана (СР) или на раскат (S), или на оба данных элемента.
Кроме того, благодаря ручкам (3), которые, как упомянуто ранее, прицеплены к крюкам (G), каждый из фиксаторов (Р) может качаться на соответствующем ему крюке (G), и это способствует самовыравниванию фиксаторов (Р) относительно оси рулона (1) во время вставки фиксаторов в сердечник (10) рулона (1).
Фиг.20 схематически показывает силы (RA), действующие на рулон (1) во время его подъема: распределение сил является таким, чтобы избежать или, по меньшей мере, значительно уменьшить изгибание сердечника (10), который, кроме того, не подвергается заметным нагрузкам, вызывающим продольный изгиб.
При рассмотрении примера, показанного на фиг.21-30, следует отметить, что каждый из рычагов (ВС) мостового крана (СР) соединен - посредством шарнира с горизонтальной осью (С-С) - с нижней выступающей частью (LC) верхней конструкции (SC). Последняя смонтирована на тележке (СА), установленной с возможностью перемещения (посредством электродвигателя, не показанного на чертежах, обычным образом) вдоль прямолинейной направляющей (GR), расположенной на заданной высоте относительно нижнего основания платформы (РВ).
Указанная направляющая (GR) показана только на фиг.21 и фиг.22, при этом ссылочные позиции ʺRCʺ обозначают колеса тележки (СА), выполненной с возможностью передвижения по балкам, которые образуют направляющую (GR), при этом на остальных фигурах она не показана для простоты. Две верхние конструкции (SC) и соответствующие выступающие части (LC) и подвижные рычаги (ВС) могут быть приближены друг к другу или удалены друг от друга, то есть могут быть перемещены ортогонально к направлению (F) плавного перемещения мостового крана (СР) вдоль направляющей (GR). На фиг.22, фиг.24 и фиг.26 стрелки (Н) показывают взаимное сближение рычагов (ВС) во время вставки фиксаторов (Р), введенных в контактное взаимодействие с ними, в соответствующие концы сердечника (10) рулона (1). Для этого каждая из двух верхних конструкций (SC) образует одно целое со второй тележкой (2С), снабженной колесами (2R), плавно перемещающимися по направляющим (2G), образуемым верхней поверхностью первой тележки (СА). Управление каждой из тележек (2С) осуществляется посредством соответствующего силового гидравлического цилиндра (2М), который обеспечивает управление ее поступательным перемещением вдоль направляющих (2G) на верхней стороне первой тележки (СА), которые проходят вдоль направления, ортогонального к направлению балок, которые образуют направляющую (GR), по которой перемещается первая тележка (СА). Каждый силовой гидравлический цилиндр (2М) прикреплен посредством его кожуха к кронштейну, закрепленному в центральном месте на первой тележке (СА), и посредством его штока присоединен к внутренней стороне соответствующей верхней конструкции (SC). Таким образом, каждая из указанных верхних конструкций (SC) с соответствующим рычагом (ВС) может быть перемещена в двух направлениях как вдоль направляющей (GR), так и ортогонально к последней.
Управление поворотом каждого подвижного рычага (ВС) вокруг оси шарнира (СС) осуществляется посредством соответствующего исполнительного механизма (АР), который имеет полый цилиндр (100), прикрепленный к верхней конструкции (SC), и шток (101), присоединенный к подвижному рычагу (ВС). Более конкретно, указанный полый цилиндр (100) шарнирно присоединен к кронштейну (102) посредством горизонтального стержня (106). Кронштейн (102) с одной стороны (с правой стороны на чертежах) шарнирно присоединен к верхней конструкции (SC) посредством стержня (103) с горизонтальной осью, ориентированной ортогонально к той же самой верхней конструкции («выходящей» из листа). Со стороны, противоположной по отношению к стержню (103), на верхней конструкции (SC) применяется динамометрический датчик (104), находящийся в фиксированном положении под свободным концом (105) кронштейна (102). Другими словами, динамометрический датчик (104) находится в фиксированном положении под концом (105) кронштейна (102), противоположным по отношению к концу того же самого кронштейна, шарнирно присоединенному к верхней конструкции (SC) посредством стержня (103). Как можно увидеть на фрагменте по фиг.28, указанная верхняя конструкция (SC) является коробчатой, как и кронштейн (102), который расположен между двумя сторонами верхней конструкции (SC). Стержень (103) проходит перпендикулярно к сторонам верхней конструкции (SC), в то время как стержень (106), который параллелен стержню (103), проходит перпендикулярно к сторонам кронштейна (102).
Как показано на фиг.28, рычаги (ВС) и выступающая часть (LC) также имеют коробчатую форму, как и верхняя конструкция (SC). Стержень (СС), который соединяет подвижный рычаг (ВС) с выступающей частью (LC), проходит перпендикулярно к данным элементам. Исполнительный механизм (АР) расположен между сторонами рычагов (ВС) и верхней конструкции (SC).
Три возможных случая, относящихся к фазе ввода фиксаторов (Р) в сердечник (10) рулона (1), таковы.
Случай 1: ось рулона (1) выровнена относительно оси (x-x) фиксаторов (Р), и отсутствуют какие-либо значительные изменения веса, действующего на динамометрический датчик (104), во время ввода фиксаторов (Р) в сердечник рулона. Данный случай проиллюстрирован на фиг.21 и фиг.22А-22В. В частности, на фиг.22А рычаг (ВС), находящийся справа, уже обеспечил ввод соответствующего фиксатора (Р) в сердечник (10) рулона (1), в то время как рычаг (ВС), находящийся слева, еще «открыт», то есть соответствующий фиксатор (Р) находится вне рулона (1). На фиг.22В оба рычага (ВС) «закрыты», то есть оба фиксатора (Р) вставлены в рулон (1). Тем не менее, само собой разумеется, два рычага (ВС) могут быть перемещены одновременно, как показано стрелками ʺHʺ.
Случай 2: ось сердечника (10) рулона (1) находится ниже, чем ось (x-x), то есть под осью (x-x), фиксаторов (Р), и во время ввода фиксаторов они вызывают подъем рулона (1), так что динамометрический датчик (104) определяет увеличение значения веса, которое превышает заданный предел. В этом случае платформа (РВ), на которой размещен рулон (1), обеспечивает коррекцию положения последнего посредством его подъема, как дополнительно раскрыто в дальнейшем, до тех пор, пока нагрузка, измеряемая динамометрическим датчиком, не станет равной нагрузке, обусловленной только весом фиксаторов (Р).
Случай 3: ось сердечника (10) рулона (1) находится выше, чем ось (x-x), то есть над осью (x-x), фиксаторов (Р), и во время ввода фиксаторов они подвергаются подъему, так что динамометрический датчик (104) определяет уменьшение значения веса, которое превышает заданный предел. В этом случае платформа (РВ), на которой размещен рулон (1), обеспечивает коррекцию положения последнего посредством его опускания, как дополнительно раскрыто в дальнейшем, до тех пор, пока нагрузка, измеряемая динамометрическим датчиком, не станет равной нагрузке, обусловленной только весом фиксаторов (Р).
Например, платформа (РВ) может быть поднята и опущена посредством пантографного механизма, расположенного и функционирующего под той же самой платформой (РВ). Таким образом, существует возможность регулирования высоты платформы и, следовательно, высоты сердечника (10) рулона (1) относительно фиксаторов (Р), соединенных с рычагами (ВС) мостового крана (СР). Указанный механизм содержит нижнее основание (200) и верхнее основание (201), соединенные посредством рычагов (202), шарнирно соединенных друг с другом и с теми же основаниями (200, 201) и соединенных посредством исполнительного механизма (203). Последний само по себе известным образом, когда он приведен в действие, определяет поворот рычагов (202) и, кроме того, подъем или опускание верхнего основания (201), на котором расположена платформа (РВ). Следовательно, обеспечивается подъем или опускание рулона (1). Следует понимать, что механизм для подъема/опускания платформы (РВ) может представлять собой механизм любого другого типа. Для упрощения на фиг.21, 23 и 25 механизм для подъема/опускания платформы (РВ) не показан.
Кронштейн (102) и динамометрический датчик (104) в соответствии с примером, описанным выше, образуют возможный вариант осуществления устройства для обнаружения изменений нагрузки на рычагах (ВС) мостового крана (СР). Указанное устройство может быть соединено с программируемым устройством (UP), как на упрощенной схеме по фиг.30, которое управляет опусканием или подъемом платформы (РВ) за счет воздействия на исполнительный механизм (203) для устранения данных изменений.
Следовательно, фиг.21-30 иллюстрируют устройство, содержащее мостовой кран (СР) с подвижными рычагами (ВС), каждый из которых выполнен с возможностью входа в контактное взаимодействие с фиксатором (Р), вставляемым в соответствующую сторону рулона (1), и платформу (РВ), расположенную под указанным основанием (11) для обеспечения опоры для рулона (1), и содержащее средства обнаружения, выполненные с возможностью обнаружения изменений нагрузки на указанных рычагах (ВС) во время вставки фиксаторов (Р) в рулон (1), и средства перемещения, выполненные с возможностью обеспечения вертикального перемещения рулона (1) и рычагов (ВС) друг относительно друга, когда абсолютная величина изменения нагрузки, определенная указанными средствами обнаружения, превышает заданный предел, до доведения указанной величины до значения ниже заданного предела.
В устройстве, показанном на фиг.21-30, указанные средства перемещения выполнены с возможностью обеспечения перемещения рулона (1) в вертикальном направлении относительно рычагов (ВС); указанные средства перемещения содержат механизм для опускания и подъема указанной платформы (РВ); указанный механизм для опускания и подъема платформы (РВ) представляет собой пантографный механизм; указанные средства для обнаружения изменений нагрузки на рычагах (ВС) содержат для каждого рычага (ВС) динамометрический датчик (104), применяемый в фиксированном положении на конструкции (SC) мостового крана (СР), к которой присоединены рычаги (ВС), и элемент (102), выполненный с возможностью воздействия на динамометрический датчик (104), при этом каждый элемент (102) соединен с соответствующим рычагом (ВС); каждый элемент (102) соединен с соответствующим рычагом (ВС) посредством исполнительного механизма (АР), который соединяет тот же самый рычаг (ВС) с указанной конструкцией (SC); указанные средства обнаружения и указанные средства перемещения соединены с программируемым устройством (UP), которое получает электрические сигналы, передаваемые средствами обнаружения, и управляет средствами перемещения и запрограммировано для приведения в действие средств перемещения в соответствии с сигналами, передаваемыми средствами обнаружения.
Следует понимать, что вышеупомянутая коррекция может быть выполнена посредством опускания или подъема рычагов мостового крана и оставления платформы (РВ) в фиксированном положении. В этом случае устройство (UP) будет соединено с исполнительными механизмами (АР) для опускания или подъема рычагов (ВС), когда, как упомянуто ранее, динамометрический датчик (104) - или другое соответствующее устройство обнаружения - обнаружит изменение нагрузки на рычагах (ВС), абсолютная величина которого превышает заданный предел, до доведения данной величины до значения ниже заданного предела.
Средства для обнаружения изменения нагрузки также пригодны для взвешивания рулона. Таким образом, существует возможность отслеживания количества обработанного материала путем вычисления разности веса рулона (1) в начале и его веса в конце этапа размотки.
Кроме того, при использовании динамометрического датчика, размещенного соответствующим образом относительно рычагов мостового крана, могут быть определены также изменения в нагрузках, действующих в направлении, параллельном оси рулона (1). Например, если рассматривать возможный случай, проиллюстрированный на фиг.30B, то видно, что фиксатор (Р) находится справа и ниже сердечника (10): изменение нагрузки, действующей в направлении, параллельном продольной оси сердечника, во время приближения рычага, несущего фиксатор (Р), будет больше заданного предела (действительно, фиксатор Р находится в положении, в котором он не может быть вставлен в сердечник рулона 1). В таком состоянии управляющее устройство (UP) выдаст команду на останов рычага, который несет фиксатор (Р), для предотвращения повреждения рулона (1).
Раскат (S), который может быть использован для осуществления способа в соответствии с настоящим изобретением, содержит опору (150), на которой может быть размещен материнский рулон (1) и которая снабжена стопорными хомутами (SM). Каждый из хомутов (SM) образует ограничитель для соответствующего фиксатора (Р), вставленного в соответствующую сторону рулона (1). Когда рулон (1) устанавливают на опоре (150), хомуты (SM) открыты. Во время этапа размотки, то есть тогда, когда рулон (1) вращается вокруг его собственной оси (x-x) и вокруг оси фиксаторов (Р), хомуты (SM) закрыты (как на фиг.31-36). Когда рулон (1) будет израсходован и должен быть удален с опоры (150) для его замены новым рулоном посредством использования мостового крана (СР), хомуты (SM) снова открывают. Опора (150), а также хомуты (SM) представляют собой элементы такого типа, которые известны специалистам в данной области техники, и, следовательно, не описаны более подробно.
Кроме того, раскат (S) содержит множество бесконечных ремней (С2), приводимых в движение шкивами (20, 21, 22, 23, 24, 25), при этом два шкива (20, 21) расположены в соответствующих фиксированных положениях, один шкив (22) также расположен в фиксированном положении и соединен с электродвигателем так, чтобы он функционировал в качестве ведущего шкива, натяжной шкив (23) установлен на валу, который может быть перемещен в горизонтальном направлении посредством исполнительного механизма (300), образующего одно целое с расположенным под ним, неподвижным основанием (400), и два ведомых шкива (24, 25) находятся на постоянном расстоянии от продольной оси рулона (1). Более конкретно, ведомые шкивы (24, 25) расположены каждый на соответствующей каретке (240, 250), которая может свободно скользить вдоль направляющей (241, 251), ориентированной радиально относительно оси рулона (1), то есть ориентированной радиально относительно хомута (SM). На фиг.31-36 ремни показаны пунктирными линиями, чтобы лучше показать их конфигурацию. Как показано на фиг.31-36, указанные направляющие (241, 251) находятся с противоположных сторон относительно хомута (SM) и ориентированы диагонально с противоположными углами наклона так, что их соответствующие верхние концы обращены к центру хомута (SM), предусмотренного на опоре (150). Другими словами, направляющие (241, 251) ориентированы так, что их верхние концы сходятся в радиальном направлении к центру хомута (SM), где проходит продольная ось рулона (1). Каретки (240, 250) приводятся в действие посредством электрического мотора-редуктора (260), который показан только на фиг.37 и фиг.39. Выходной вал мотора-редуктора (260) обеспечивает перемещение двух цепей (270, 280), приводимых в движение посредством соответствующих ведущих роликов (271, 281). Цепи (270, 280) и мотор-редуктор (260) находятся внутри направляющих (241, 251), то есть в пространстве, ограниченном указанными направляющими. Каждая каретка (240, 250) соединена с ее нижней стороны с соответствующей цепью (270, 280). Места, в которых каретки (240, 250) соединены с цепями (270, 280), обозначены ссылочными позициями (272) и (282).
Как показано на чертежах, шкивы (20, 21, 22, 23, 24, 25) расположены таким образом, что ремни (С2) находятся ниже рулона (1).
На каретке (240) установлен фотоэлемент (F5), оптическая ось которого направлена к рулону (1). Положение фотоэлемента (F5) на каретке (240) является фиксированным. Для упрощения фотоэлемент (F5) показан только на фиг.31 и на блок-схеме по фиг.37.
Рулон (1) образует преграду для луча света, генерируемого фотоэлементом (F5), при условии, что расстояние между тем же самым фотоэлементом (F5) и рулоном (1) равно заданной величине (первое рабочее состояние).
Когда вследствие уменьшения диаметра рулона (1), вызываемого размоткой бумажного материала, расстояние между фотоэлементом (F5) и рулоном (1) превысит заданную величину, рулон (1) больше не будет образовывать преграду для луча света, и это соответствует второму рабочему состоянию.
В первом рабочем состоянии каретки (240, 250) и соответствующие шкивы (24, 25) являются неподвижными.
Во втором рабочем состоянии каретки (240, 250) приближены к рулону (1), то есть они синхронно поднимаются вдоль соответствующих направляющих (241, 251) до тех пор, пока первое рабочее состояние не будет восстановлено. Исполнительный механизм (300) одновременно обеспечивает перемещение шкива (23) для поддержания надлежащего натяжения ремней (С2), когда конфигурация последних изменяется.
Для этого фотоэлемент (F5) соединен с управляющим устройством (UC), которое управляет мотором (260) и снабжено панелью (PS) для задания желательной величины вышеуказанного расстояния.
Таким образом, когда диаметр рулона (1) уменьшается, всегда имеется ветвь (200) ремней (C2), которая «копирует» нижнюю сторону того же самого рулона (1) и имеет по существу постоянную угловую амплитуду (а), при этом угол (а) видим между осью (x) рулона (1) или соответствующего фиксатора (Р) и точками контакта верхней ветви (200) ремней (С2) с рулоном (1), как показано на фиг.38.
На практике расстояние (d) между ведомыми шкивами (24, 25) и рулоном (1) остается постоянным во время размотки бумажного полотна с рулона (1). Другими словами, верхняя ветвь (200) ремней (С2) следует за изменением диаметра рулона (1), поскольку она поднимается и копирует нижнюю сторону последнего.
Следовательно, независимо от диаметра рулона (1) во время размотки бумаги ремни (С2) всегда воздействуют оптимальным образом на тот же самый рулон, идеально копируя профиль последнего в зоне (200), где они оказывают тянущее воздействие.
В качестве примера начальный диаметр рулона (1) составляет 3000 мм, и конечный диаметр составляет 500 мм.
Фотоэлемент (F5) может быть заменен любым другим устройством, пригодным для определения расстояния от каретки (240) и, следовательно, от фотоэлемента (F5) до рулона (1).
Следовательно, раскат (S), описанный выше, содержит:
- тянущие средства с переменной конфигурацией, которые воздействуют за счет контакта на рулон (1) и выполнены с возможностью обеспечения вращения того же самого рулона вокруг соответствующей продольной оси с заданной скоростью;
- средства реконфигурирования, выполненные с возможностью изменения конфигурации указанных тянущих средств в зависимости от текущего диаметра рулона (1);
- средства (F5; UC) управления, выполненные с возможностью управления средствами реконфигурирования таким образом, чтобы контакт между рулоном (1) и указанными тянущими средствами был обеспечен в зоне (200) контакта, имеющей угловую амплитуду (а), по существу постоянную во время изменения диаметра рулона (1).
В соответствии с примером, описанным выше, тянущие средства с переменной конфигурацией образованы ремнями (С2); средства реконфигурирования тянущих средств образованы каретками (240, 250) с соответствующими шкивами (24, 25), и средства управления образованы фотоэлементом (F5) и программируемым устройством (UC). Кроме того, в соответствии с примером, описанным выше, тянущие средства расположены под опорой (150) так, чтобы они воздействовали на нижнюю сторону рулона (1).
Мостовой кран (СР) также используется для удаления сработанных рулонов (ЕВ) из раската (S) и для перемещения их к позиции (К) выгрузки рядом с платформой (РВ). На указанной позиции (К) выгрузки имеется каретка (К1), которая выполнена с возможностью плавного перемещения вдоль наклонной плоскости (К2) и приводится в движение соответствующим электродвигателем (К3), соединенным с кареткой посредством цепей (К5), направляемых роликами (К4), предусмотренными в заданных положениях ниже плоскости (К2). Указанная плоскость (К2) ориентирована таким образом, что она имеет верхнюю сторону, на которой перемещается каретка (К1) для приема сработанного рулона (ЕВ), и нижнюю сторону разгрузки.
Мостовой кран подает сработанный рулон (ЕВ) к каретке (К1), ожидающей в первом, то есть верхнем, положении, и затем перемещается для захвата рулона, предусмотренного на платформе (РВ), и для размещения его на раскате (S), как раскрыто выше, так что новый рулон занимает место сработанного рулона. После этого каретка (К1) переводится к нижней стороне плоскости (К2). Теперь платформу (РВ) поднимают для захвата на ней сработанного рулона благодаря выступающим частям (12) поворотного компонента (10), которые входят в контактное взаимодействие со сработанным рулоном (ЕB) снаружи по отношению к рычагам (К6) каретки (К1), расположенным с указанной нижней стороны, как показано стрелками (К7) на фиг.42.
Следовательно, платформа, используемая для рулонов (1), предназначенных для раската (S), также используется для обеспечения возможности удаления сработанных рулонов (ЕВ) посредством устройства с вильчатым захватом, с помощью которого новые рулоны загружаются на ту же самую платформу.
На практике детали исполнения могут различаться любым эквивалентным образом по отношению к элементам, описанным и показанным на чертежах, без отхода от идеи выбранного решения и при этом остаются в пределах объема охраны, предоставленной настоящим патентом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МАТЕРИНСКИМИ РУЛОНАМИ НА УСТАНОВКАХ ДЛЯ КОНВЕРТИНГА БУМАГИ | 2015 |
|
RU2676155C2 |
| ФИКСАТОР ДЛЯ ОБЕСПЕЧЕНИЯ ОПОРЫ ДЛЯ МАТЕРИНСКИХ РУЛОНОВ В УСТАНОВКАХ ДЛЯ КОНВЕРТИНГА БУМАГИ | 2015 |
|
RU2676154C2 |
| ОБОРУДОВАНИЕ ДЛЯ УДАЛЕНИЯ БУМАГИ С РАЗМАТЫВАЕМЫХ РУЛОНОВ, ИСПОЛЬЗУЕМЫХ ДЛЯ ИЗГОТОВЛЕНИЯ ЛОГОВ ИЗ БУМАЖНОГО МАТЕРИАЛА | 2018 |
|
RU2751661C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ РУЛОНОВ ПЕЧАТНОЙ ПРОДУКЦИИ | 1992 |
|
RU2071926C1 |
| Устройство для механизированной замены анодов в электролизере для получения алюминия | 1988 |
|
SU1623569A3 |
| ПНЕВМОКАРКАСНОЕ ЗВЕНО И АВТОМОБИЛЬ ДЛЯ СКЛАДЫВАНИЯ, ПОГРУЗКИ И ПЕРЕВОЗКИ ЗВЕНЬЕВ МОБИЛЬНОГО ПАРОМНО-МОСТОВОГО ПАРКА | 1999 |
|
RU2174571C2 |
| УСТАНОВКА И СПОСОБ ПРОИЗВОДСТВА БУМАЖНЫХ ЛОГОВ | 2017 |
|
RU2737401C1 |
| Устройство для автоматической склейки полотен на раскате | 1982 |
|
SU1033615A1 |
| РАЗДАТОЧНОЕ УСТРОЙСТВО ДЛЯ ЛИСТОВЫХ МАТЕРИАЛОВ | 2006 |
|
RU2397688C1 |
| ПРЕДВАРИТЕЛЬНО НАПРЯЖЕННАЯ ПОДКРАНОВАЯ БАЛКА | 2004 |
|
RU2268230C2 |












Изобретение относится к области манипулирования рулонами. При осуществлении способа манипулирования материнскими рулонами в установках для конвертинга бумаги обеспечивают платформу с основанием и раскат. Основание выполнено с возможностью обеспечения опоры для материнского рулона на станции ожидания. Раскат выполнен с возможностью приема рулона на станции размотки. Позиционируют материнский рулон на платформе на станции ожидания. Транспортируют материнский рулон вдоль заданной траектории от указанной платформы к указанному раскату посредством мостового крана. Кран снабжен подвижными рычагами. Перед транспортировкой временно соединяют два фиксатора с рычагами мостового крана. Вставляют фиксаторы в противоположные базовые части материнского рулона посредством рычагов. Транспортировку рулона осуществляют вдоль траектории, содержащей по меньшей мере один участок подъема или опускания, вместе с вставленными в рулон фиксаторами. 14 з.п. ф-лы, 46 ил.
1. Способ манипулирования материнскими рулонами в установках для конвертинга бумаги, включающий следующие этапы:
а) обеспечение по меньшей мере одной платформы с основанием, выполненным с возможностью обеспечения опоры для материнского рулона на станции ожидания, и по меньшей мере одного раската (S), выполненного с возможностью приема указанного рулона на станции размотки, на которой материнский рулон разматывают;
b) позиционирование материнского рулона (1) на платформе на станции ожидания;
с) транспортирование материнского рулона (1) вдоль заданной траектории от указанной платформы к указанному раскату (S) посредством мостового крана (СР), снабженного подвижными рычагами (ВС),
отличающийся тем, что
указанному этапу (с) предшествуют первый этап, состоящий во временном соединении двух фиксаторов (Р) с рычагами (ВС) мостового крана (СР), и второй этап, состоящий во вставке данных двух фиксаторов (Р) в две противоположные базовые части материнского рулона (1) посредством использования тех же самых рычагов (ВС);
указанный этап (с) включает транспортирование рулона (1) вдоль траектории, содержащей по меньшей мере один участок подъема или опускания, вместе с фиксаторами (Р), вставленными таким образом в материнский рулон (1).
2. Способ по п.1, отличающийся тем, что указанному этапу транспортирования рулона (1) предшествует этап, состоящий в повороте того же самого рулона (1) на 180° вокруг вертикальной оси, если ориентация рулона (1) на платформе отличается от заданной ориентации.
3. Способ по п.2, отличающийся тем, что указанный этап поворота рулона (1) выполняют на указанной станции ожидания.
4. Способ по п.1, отличающийся тем, что он включает этап обнаружения возможных изменений нагрузки на указанных рычагах (ВС) во время вставки фиксаторов (Р) внутрь рулона (1) и включает перемещение рулона (1) и рычагов (ВС) относительно друг друга, когда абсолютная величина изменения нагрузки превышает заданный предел, до доведения указанной величины до значения ниже заданного предела.
5. Способ по п.4, отличающийся тем, что рулон (1) перемещают вертикально относительно рычагов (ВС).
6. Способ по п.1, в котором каждый фиксатор (Р) содержит наружную сторону (РХ) и внутреннюю сторону (PN), при этом внутренняя сторона (PN) выполнена с возможностью вставки в рулон (1) бумажного материала, и при этом наружная сторона (РХ) остается с наружной стороны того же самого рулона (1), когда внутренняя сторона (PN) находится внутри рулона (1), отличающийся тем, что указанная наружная сторона (РХ) выполнена с зацепляемой крюком частью (3), выполненной с возможностью ввода в контактное взаимодействие со средством (СР), выполненным с возможностью обеспечения вертикального перемещения фиксатора (Р).
7. Способ по п.6, отличающийся тем, что наружная сторона (РХ) фиксатора (Р) образована хвостовиком (2), продольная ось которого совпадает с продольной осью (x-x) фиксатора (Р), и тем, что указанная зацепляемая крюком часть содержит проушину, образованную на хвостовике (2) и ограниченную двумя параллельными консольными элементами (30), которые выступают в радиальном направлении от хвостовика (2) и соединены элементом (31), параллельным указанной продольной оси (x-x).
8. Способ по п.7, отличающийся тем, что указанная проушина (30, 31) предусмотрена с верхней стороны хвостовика (2).
9. Способ по п.1, отличающийся тем, что указанные фиксаторы (Р) представляют собой разжимные фиксаторы.
10. Способ по п.1, отличающийся тем, что каждый из указанных фиксаторов (Р) имеет внутреннюю сторону (PN), образованную множеством секторов (4), каждый из которых образован участком с цилиндрической поверхностью со свободной передней частью (40), тем, что передние части (40) указанных секторов (4) образуют по существу круглую форму с диаметром, изменяющимся между максимальным значением (4а) и минимальным значением (4с), и тем, что разность (Δ) указанного максимального значения (4а) и указанного минимального значения (4с) составляет от 10% до 30% от максимального значения (4а): 0,30 * (4а) ≥ Δ =(4а-4с) ≥ 0,10 * (4а).
11. Способ по п.1, отличающийся тем, что указанный участок подъема или опускания представляет собой вертикальный участок указанной заданной траектории.
12. Способ по любому из предшествующих пунктов, отличающийся тем, что указанные фиксаторы (Р) извлекают посредством рычагов (ВС) мостового крана (СР) из сработанного материнского рулона, который перемещен на станцию выгрузки сработанных рулонов.
13. Способ по одному или более из предшествующих пунктов, отличающийся тем, что указанный этап (с) включает транспортирование рулона (1) вдоль траектории, которая заканчивается в соответствии с раскатом (S), снабженным средствами размотки, расположенными и функционирующими под опорой (150), выполненной с возможностью обеспечения опоры для рулона (1), при этом раскат (S) свободен от верхних конструкций.
14. Способ по пп. 2 и 3, отличающийся тем, что указанный возможный поворот рулона (1) выполняют при том же самом рулоне, позиционируемом на указанной платформе, так что любой подобный поворот выполняют при рулоне (1), находящемся не в подвешенном состоянии.
15. Способ по п.1, отличающийся тем, что указанную платформу также используют для приема сработанных рулонов (ЕВ), удаленных из раската (S).
| US 3695532 A, 03.10.1972 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| СКЛАДНОЕ УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ МАТЕРИАЛОВ В ВИДЕ РУЛОНОВ, ЗАХВАТ ДЛЯ ЭТОГО УСТРОЙСТВА И РУЛОННЫЙ СЕРДЕЧНИК | 1992 |
|
RU2092414C1 |

