Общая область техники
Объектом изобретения является система управления полетом летательного аппарата, содержащая блоки обработки или вычислительные устройства и образующая двухканальную архитектуру.
В частности, эта система находит свое применение для двигателей небольшого размера, таких как вертолетные двигатели.
Уровень техники
Существующие бортовые системы управления полетом, которыми оснащены летательные аппараты, такие как самолеты или вертолеты, выполняют функции управления и регулирования двигателя летательного аппарата, обеспечивающие его хорошую работу. Такие функции являются критическими для безопасности пассажиров. Следовательно, такие системы должны быть стойкими к неисправностям.
Для этого, как правило, существующие системы управления полетом содержат два блока обработки или вычислительных устройства, каждое из которых может обеспечивать хорошую работу двигателя. Следовательно, такая система образует двухканальную архитектуру, в которой каждый канал может обеспечивать выполнение указанных критических функций в случае неисправности другого канала.
Чтобы определить, следует ли ему принять за себя выполнение этих функций, каждый блок обработки должен иметь возможность обмениваться информацией с другим блоком обработки системы управления, в частности, информацией, касающейся рабочего состояния этого другого блока обработки. Для этого, как правило, оба блока обработки системы управления соединены цифровой двухсторонней линией связи или двумя односторонними линиями связи противоположного направления, такими как линия связи CCDL (“Cross Channel Data Link”).
Чтобы повысить стойкость к неисправностям такой системы управления полетом, блоки обработки системы управления могут быть выполнены раздельно в двух удаленных корпусах, чтобы быть удаленными географически друг от друга и чтобы уменьшить таким образом чувствительность к внешним воздействиям. Кроме того, чтобы сделать систему управления стойкой к неисправности линии передачи данных между блоками обработки, блоки обработки могут быть соединены при помощи дополнительной линии связи в виде нескольких дискретных аналоговых связей, которые могут достигать количества двадцати для систем управления на гражданских самолетах. Однако увеличение числа связей повышает вероятность отказа одной из них и увеличивает объем проводки, что затрудняет получение компактной системы управления полетом. Хотя для управления двигателями больших летательных аппаратов, таких как лайнеры, такая компактность не имеет значения, она становится определяющей, чтобы ограничивать общий габарит, в случае двигателя небольшого летательного аппарата, такого как вертолетный двигатель.
Следовательно, существует потребность в системе управления, имеющей двухканальную архитектуру, сводящую к минимуму количество проводки и в то же время остающуюся стойкой к неисправностям и к внешним воздействиям.
Раскрытие изобретения
В связи с этим первым объектом настоящего изобретения является система управления полетом летательного аппарата, содержащая:
- первый блок обработки,
- второй блок обработки,
- средства связи, выполненные с возможностью установления первой цифровой двухсторонней линии связи и второй цифровой двухсторонней линии связи между первым блоком обработки и вторым блоком обработки,
при этом указанная вторая линия связи является избыточной с первой линией связи, и указанные первая и вторая линии связи могут быть активными одновременно,
при этом указанная система дополнительно содержит аварийные средства связи, позволяющие обеспечивать обмены данными между первым блоком обработки и вторым блоком обработки в случае отказа первой и второй линий связи,
при этом указанные аварийные средства связи содержат сеть датчиков или приводов и/или защищенную бортовую сеть для авионики.
Такая система обладает повышенной стойкостью к неисправностям, благодаря избыточности своих блоков обработки и своих средств связи, а также за счет минимизации числа линий связи, и одновременно имеет ограниченный габарит. Кроме того, аварийные средства связи позволяют избегать полного ослепления двухканальной системы и прерывания связи между двумя блоками обработки. Наконец, использование таких сетей для обмена информацией между блоками обработки позволяет повысить уровень избыточности средств связи между блоками обработки и обеспечивать надежность работы системы управления полетом, не прибегая к использованию специальных дополнительных средств связи только для связи между блоками обработки.
Согласно предпочтительному и не ограничительному признаку, первая и вторая линии связи могут быть линиями связи CCDL (“Cross Channel Data Link”).
Такая линия связи позволяет, в частности, блокам обработки обмениваться более сложными данными исправности, чем данные, обмениваемые при помощи дискретных аналоговых линий связи известных систем, и одновременно уменьшить объем проводки.
Защищенная бортовая сеть для авионики может быть, например, избыточной сетью Ethernet типа AFDX (“Avionics Full DupleX switched Ethernet) или μAFDX.
Согласно предпочтительному и не ограничительному признаку, каждый блок обработки заявленной системы управления содержит средства для проверки целостности данных, получаемых по каждой из линий связи.
Это позволяет убедиться, что принятые данные не были искажены во время их передачи.
Кроме того, каждый блок обработки может содержать средства для проверки когерентности данных, полученных по первой линии связи и по второй линии связи, в результате передачи данной одновременно по первой линии связи и по второй линии связи.
Это позволяет улучшить способность системы обнаруживать изменения данных, обмениваемых между блоками обработки, и свести к минимуму вероятность отказа системы управления полетом.
Кроме того, средства связи заявленной системы управления полетом могут быть выполнены с возможностью передачи от первого блока обработки во второй блок обработки данных, относящихся к исправности первого блока обработки, при этом указанная заявленная система дополнительно содержит средства для выбора блока обработки с целью управления двигателем указанного летательного аппарата среди первого и второго блоков обработки в зависимости от переданных данных, относящихся к исправности первого блока обработки, и от данных, относящихся к исправности второго блока обработки.
Такой обмен данными позволяет каждому блоку обработки узнать рабочее состояние другого блока обработки, чтобы гарантировать, что канал с лучшим рабочим состоянием продолжает обеспечивать управление двигателем.
Краткое описание чертежей
Другие отличительные признаки и преимущества будут более очевидны из нижеследующего описания варианта выполнения. Это описание представлено со ссылками на прилагаемые чертежи, на которых:
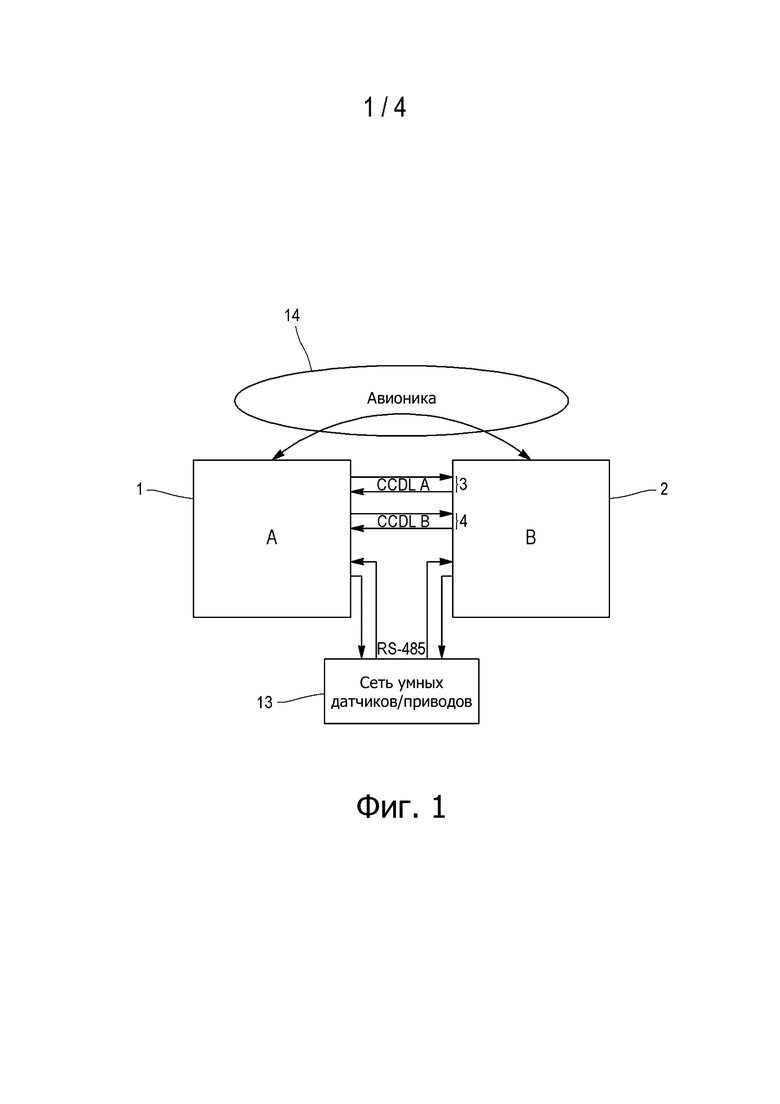
фиг. 1 - схематичный вид системы управления полетом согласно варианту выполнения изобретения;
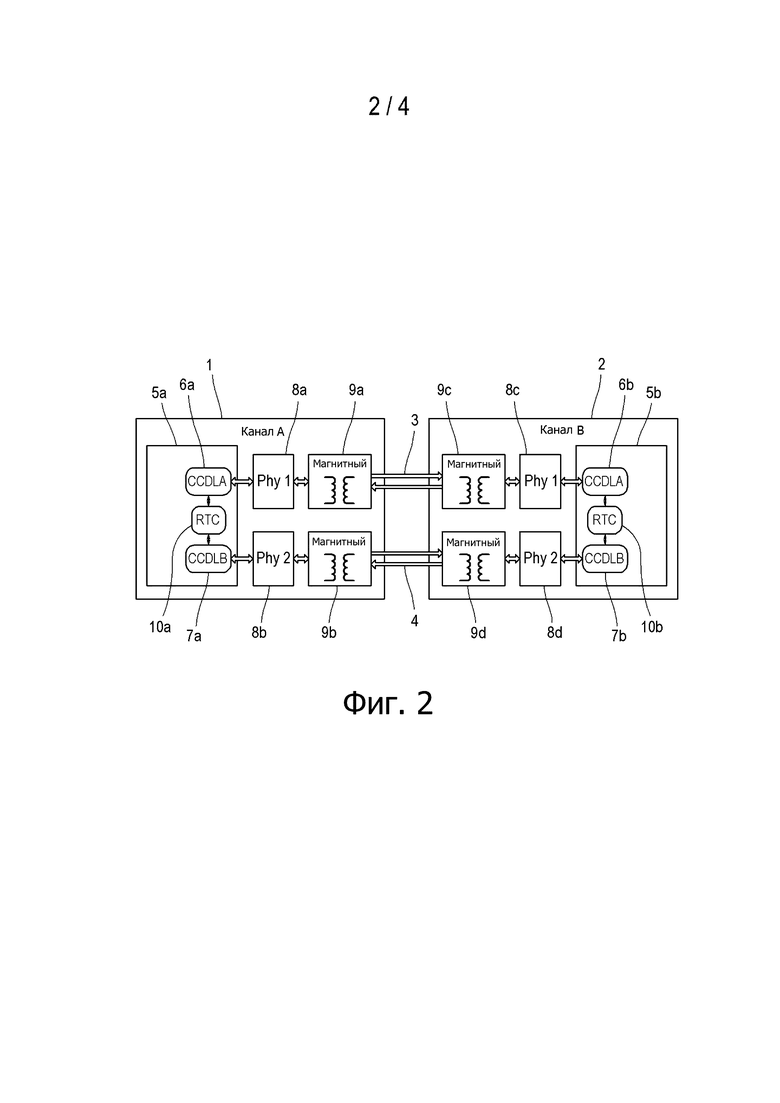
фиг. 2 - схема аппаратных средств, предназначенных для установления двух линий связи CCDL между двумя блоками обработки системы управления полетом согласно варианту выполнения изобретения;
фиг. 3 схематично иллюстрирует физическое разделение модулей CCDL каждого блока обработки системы управления полетом согласно варианту выполнения изобретения;
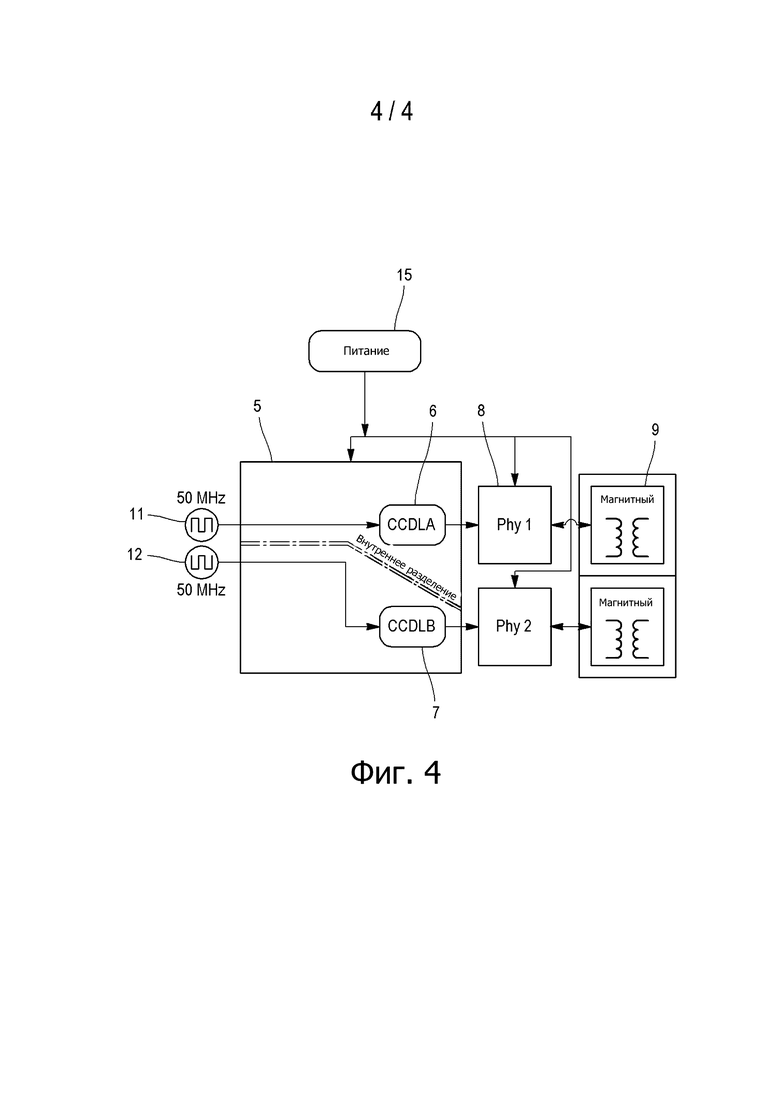
фиг. 4 схематично иллюстрирует разделение аппаратных средств блока обработки, предназначенных для установления двух линий связи CCDL, согласно варианту выполнения изобретения.
Осуществление изобретения
Вариант выполнения изобретения, представленный на фиг. 1, касается системы управления полетом летательного аппарата, содержащей по меньшей мере первый блок 1 обработки и второй блок 2 обработки. Эта два блока обработки являются избыточными и могут, каждый, выполнять функции управления и регулирования двигателя летательного аппарата. Таким образом, система, показанная на фиг. 1, образует двухканальную архитектуру, содержащую канал А и канал В.
Блоки обработки 1 и 2 могут быть процессорами одной многопроцессорной компьютерной системы, содержащей несколько процессоров. Чтобы улучшить стойкость системы управления полетом по отношению к внешним воздействиям и чтобы одно локальное событие не могло вывести из строя одновременно оба блока обработки 1 и 2, оба канала могут быть установлены на расстоянии друг от друга в разных корпусах. В такой конфигурации блоки обработки не являются рабочими исполнительными устройствами, находящимися внутри одного процессора.
Система содержит также средства связи, позволяющие соединять оба блока обработки для обеспечения обмена данными, являющимися существенными для нормальной работы каждого из блоков обработки, такими как данные о рабочем состоянии противоположного блока обработки.
Эта двухканальная система отличается от известных систем тем, что средства связи выполнены с возможностью установления первой цифровой двухсторонней линии связи 3 и второй цифровой двухсторонней линии связи 4 между первым блоком 1 обработки и вторым блоком 2 обработки. В отличие от известных систем, такая система не содержит никакой дискретной связи между двумя блоками обработки, что позволяет ограничить сложность ее проводки и вероятность отказа одной из связей.
Вторая линия связи 4 является избыточной с первой линией связи 3, чтобы обеспечивать связь между двумя блоками обработки в случае отказа первой линии связи 3 и наоборот. С точки зрения обмена информацией между двумя блоками обработки такая избыточность обеспечивает такой же уровень надежности, как и у известных систем.
Кроме того, указанные первая и вторая линии связи могут быть одновременно активными. Таким образом, в отличие от систем, в которых избыточную линию связи используют только в случае отказа первой линии связи, система управления полетом может использовать первую линию связи 3 и вторую линию связи 4 одновременно при нормальной работе, то есть в случае отсутствия отказа одной из двух линий связи, и может использовать сосуществование этих двух линий связи, чтобы проверять отсутствие искажения данных, обмениваемых между двумя блоками обработки.
Первый и второй блоки обработки 1 и 2 могут использовать протокол Ethernet EIEEE 802.3, HDLC, SDLC, или любой другой протокол, имеющий функцию обнаружения или исправления ошибки, чтобы сообщаться между собой через две линии связи 3 и 4. В частности, линия связи Ethernet обеспечивает отличные характеристики, высокую надежность по отношению к окружающей среде, в частности, с точки зрения стойкости к действию молнии и электромагнитной совместимости (“CEM”), и высокую функциональную надежность, благодаря применению механизмов контроля целостности данных и контроля потоков. Кроме того, протокол Ethernet является промышленным стандартом, совместимым с технологиями связи в рамках авионики, такими как AFDX (“Avionics Full DupleX switched Ethernet) или μAFDX, и с технологиями обслуживания.
Первая и вторая линии связи могут быть линиями связи CCDL (“Cross Channel Data Link”). Такая линия связи позволяет синхронизировать каждое приложение с точностью до ста микросекунд. Такая линия связи позволяет также, вместо обмена дискретными сообщениями, как в известных системах, осуществлять обмен данными исправности, формируемыми аппаратными средствами (“hardware”) или программными средствами (“software”), данными, необходимыми для системы (измерение, статус…), и функциональными данными эксплуатационной системы (OS) или прикладной системы (AS).
Такие линии связи CCDL между двумя блоками обработки А и В показаны на фиг. 2. Каждый блок 1, 2 обработки может содержать систему, например, однокристальную систему (SoC, “system on a chip”), или систему, состоящую из микропроцессора и периферийных средств, установленных в отдельных корпусах или в карте FPGA, при этом система 5а, 5b имеет первый модуль CCDL (CCDLА) 6а, 6b для установления первой линии связи CCDL 3 и второй модуль CCDL (CCDLВ) 7а, 7b для установления второй линии связи CCDL 4. Поскольку каждая линия связи CCDL имеет свой собственный модуль, независимость каждой из линий связи CCDL увеличивается, и вероятность одновременного отказа обеих линий CCDL уменьшается. Каждый модуль CCDL может быть соединен с входным/выходным интерфейсом в своем корпусе через материальный интерфейс Phy 8a, 8b, 8c, 8d и трансформатор 9a, 9b, 9c, 9d.
Как показано на фиг. 3, модули CCDL каждого блока обработки могут быть физически разделены, будучи расположенными на системе 5а, 5b в разных местах, удаленных друг от друга, например, каждый расположен в углу системы. В альтернативном варианте эти модули CCDL могут быть расположены на разных кристаллах. Это позволяет уменьшить вероятность общей неисправности в случае изменения типа SEU (“Single Event Upset”) или MBU (“Multiple Bit Upset”).
Согласно первому варианту, каждая система 5a, 5b получает питание от отдельного источника питания. Согласно второму варианту, система содержит источник питания 15 (“power supply”), общий для всей однокристальной системы, при этом каждая однокристальная система может питаться при помощи двух разных синхронизирующих сигналов 11 и 12, как показано на фиг. 4. Таким образом, хотя их питание и не является независимым, модули CCDL каждого блока обработки могут питаться от независимых тактовых синхронизаторов, что усиливает стойкость однокристальной системы к неисправностям, поскольку неисправность тактового синхронизатора одного из модулей CCDL не может повлиять на другой модуль CCDL.
Модули CCDL каждого блока обработки могут быть синхронизированы при помощи локального синхронизирующего механизма в реальном времени (HTR или RTC “Real time clock”) 10a, 10b, как показано на фиг. 2, и механизма синхронизации, такого как механизм с синхронизирующим окном. Таким образом, в случае потери синхронизации каждый блок обработки работает, благодаря своему локальному тактовому синхронизатору, затем опять синхронизируется при получении надлежащего сигнала. Локальный синхронизирующий механизм можно запрограммировать при помощи приложения, и его программирование защищено от изменений типа SEU (“Single Event Upset”) или MBU (“Multiple Bit Upset”). Вместе с тем, линии связи CCDL могут продолжать работать даже в отсутствие синхронизации или в случае потери тактового синхронизатора.
Система может также содержать аварийные средства связи, позволяющие обеспечивать обмены данными между первым и вторым блоками обработки и используемые только в случае отказов первой и второй линий связи, чтобы избегать прерывания связи между блоками обработки.
В первом варианте выполнения, представленном на фиг. 1, эти аварийные средства связи могут содержать сеть датчиков или приводов 13. Такая сеть датчиков или приводов может быть, например, сетью умных датчиков или приводов (“smart sensor, smart actuator”). Каждый блок обработки можно подключить к этой сети 13 через шину типа RS-485, позволяющую передавать информацию не в аналоговом, а в цифровом виде.
Во втором варианте выполнения, представленном на фиг. 1, эти аварийные средства связи содержат бортовую защищенную сеть 14 для авионики. Такая защищенная бортовая сеть может быть, например, избыточной сетью Ethernet, такой как AFDX (“Avionics Full DupleX switched Ethernet”) или μAFDX. Такая сеть обеспечивает средства общего использования ресурсов, разделения потоков, а также детерминизм и доступность, необходимые для авиационной сертификации.
Поскольку цифровые сигналы, передаваемые через две двухсторонние линии связи между блоками обработки, являются более чувствительными к помехам, чем дискретные аналоговые сигналы, передаваемые через множество дискретных линий связи в существующих системах, можно установить механизмы контроля целостности и контроля когерентности данных, передаваемых между двумя удаленными блоками обработки.
Так, каждый блок обработки может содержать средства проверки целостности данных, получаемых через каждую из двухсторонних линий связи. Чтобы проверить целостность полученных данных, можно проверить различные поля каждого принятого фрейма, в частности, в случае линии связи Ethernet, - поля, относящиеся к адресу получателя, к адресу источника, к типу и к длине фрейма, к данным МАС и к вставным данным. Фрейм можно считать некорректным, если длина этого фрейма не соответствует длине, указанной в поле длины фрейма, или если байты не являются целыми числами. Фрейм можно также считать некорректным, если контроль избыточности (CRC, “Cyclic Redundancy Check”), производимый вычислением при получении фрейма, не соответствует принятому CRC по причине ошибок, связанных, например, с помехами во время передачи.
Кроме того, при передаче одной данной одновременно по первой линии связи 3 и по второй линии связи 4 каждый блок обработки может содержать средства для проверки когерентности данных, принятых по двум линиям связи, которые должны переносить одну и ту же информацию в отсутствие неисправности или искажения передаваемых фреймов.
Чтобы иметь возможность обеспечивать управление двигателем летательного аппарата, система управления полетом должна доверить это управление одному из своих двух каналов. Для этого каждый блок обработки должен знать рабочее состояние противоположного блока обработки. Поэтому средства связи системы выполнены с возможностью передавать от первого блока обработки во второй блок обработки данные, относящиеся к исправности первого блока обработки, и наоборот.
Такие данные исправности являются данными, позволяющими выбирать канал и осуществлять полную системную диагностику. Они могут быть: данными диагностики CCDL, сигналами, необходимыми для логики переключения каналов, данными статуса эксплуатационной системы и приложений, данными диагностики оборудования, в частности, датчиков или приводов, данными функциональной диагностики, осуществляемой программой, и т.д.
Система управления полетом может содержать средства, чтобы выбирать, - с целью управления двигателем летательного аппарата в зависимости от переданных данных, относящихся к исправности первого блока обработки, и данных, относящихся к исправности второго блока обработки, - блок обработки среди первого и второго блоков обработки, позволяющий обеспечивать лучшую работу системы управления полетом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНАЯ АРХИТЕКТУРА | 2015 |
|
RU2679706C2 |
| Способ проверки неразрывности передачи данных между главным входным блоком и главным выходным блоком | 2015 |
|
RU2677454C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| СИСТЕМА ИНДИКАЦИИ ДЛЯ ПРИЛОЖЕНИЙ АВИОНИКИ И НЕ АВИОНИКИ | 2008 |
|
RU2467289C2 |
| СПОСОБ ЗАПУСКА ТЕСТИРОВАНИЯ РАБОТЫ ВЕНТИЛЯТОРА | 2015 |
|
RU2674611C2 |
| СТРУКТУРА, РАСПРЕДЕЛЕННАЯ МЕЖДУ СИСТЕМОЙ FADEC И КОМПОНЕНТАМИ АВИОНИКИ | 2008 |
|
RU2483005C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕДАЧИ ДАННЫХ И ЭНЕРГИИ ЧЕРЕЗ УСТРОЙСТВА СЕТИ | 2010 |
|
RU2488962C2 |
| АРХИТЕКТУРА СИСТЕМЫ ОТКАЗОУСТОЙЧИВОЙ КОММУТАЦИИ ИНФОРМАЦИИ | 2016 |
|
RU2665227C2 |
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ БОЕВЫХ КОМПЛЕКСОВ | 2014 |
|
RU2595507C2 |
| РАДИОСИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2564434C2 |

Система управления полетом летательного аппарата содержит два блока обработки, средства двухсторонней связи между первым и вторым блоками обработки, выполненные с возможностью быть активными одновременно, аварийные средства связи, содержащие сеть датчиков или приводов и защищенную бортовую сеть для авионики. Обеспечивается повышение надежности системы управления полетом, уменьшение габаритов. 5 з.п. ф-лы, 4 ил. 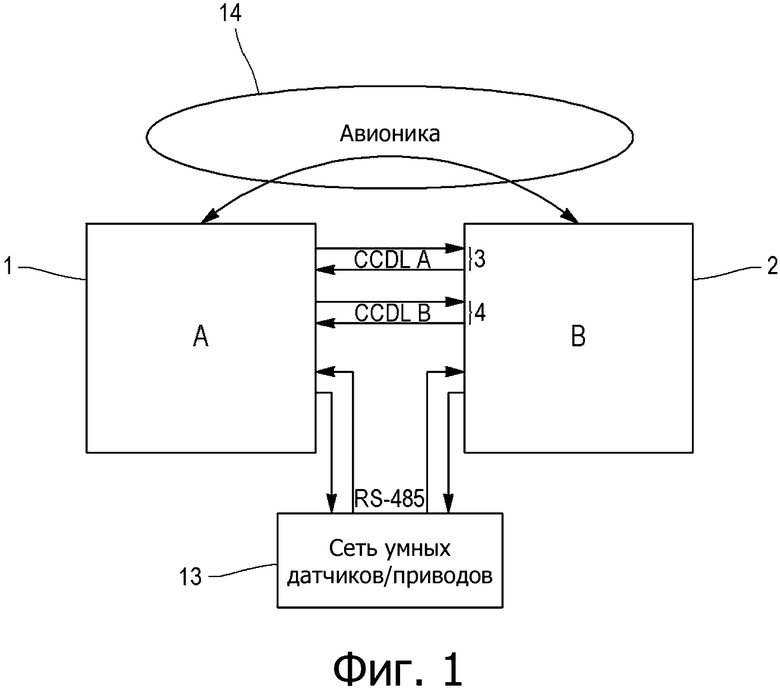
1. Система управления полетом летательного аппарата, содержащая:
первый блок (1) обработки,
второй блок (2) обработки,
средства связи, выполненные с возможностью установления первой цифровой двухсторонней линии связи (3) и второй цифровой двухсторонней линии связи (4) между первым блоком (1) обработки и вторым блоком (2) обработки,
при этом указанная вторая линия связи (4) является избыточной для первой линии связи (3),
и указанные первая (3) и вторая (4) линии связи выполнены с возможностью быть активными одновременно,
при этом указанная система дополнительно содержит аварийные средства связи, позволяющие обеспечивать обмен данными между первым (1) и вторым (2) блоками обработки в случае отказа первой (3) и второй (4) линий связи,
при этом указанные аварийные средства связи содержат сеть (13) датчиков или приводов и/или защищенную бортовую сеть (14) для авионики.
2. Система управления полетом по п. 1, в которой первая (3) и вторая (4) линии связи являются линиями связи CCDL (“Cross Channel Data Link”).
3. Система управления полетом по п. 1 или 2, в которой защищенная бортовая сеть (14) является избыточной сетью Ethernet типа AFDX (“Avionics Full DupleX switched Ethernet) или μAFDX.
4. Система управления полетом по любому из пп. 1-3, в которой каждый блок (1, 2) обработки содержит средства для проверки целостности данных, принимаемых по каждой из линий связи (3, 4).
5. Система управления полетом по любому из пп. 1-4, в которой каждый блок (1, 2) обработки содержит средства для проверки согласованности данных, принимаемых по первой линии связи (3) и по второй линии связи (4) в результате передачи данных одновременно по первой линии связи (3) и по второй линии связи (4).
6. Система управления полетом летательного аппарата по любому из пп. 1-5, в которой средства связи выполнены с возможностью передачи от первого блока (1, 2) обработки во второй блок (2, 1) обработки данных, относящихся к исправности первого блока (1, 2) обработки, при этом указанная система содержит средства для выбора блока обработки для управления двигателем указанного летательного аппарата из первого (1, 2) и второго (2, 1) блоков обработки в зависимости от переданных данных, относящихся к исправности первого блока обработки, и от данных, относящихся к исправности второго блока (2, 1) обработки.
| US 20080205416 A1, 28.08.2008 | |||
| US 20120297108 A1, 22.11.2012 | |||
| US 8504178 B2, 06.08.2013 | |||
| US 5274554 A1, 28.12.1993. |

