Изобретение относится к технике обработки цифровых данных с помощью программируемых специализированных вычислительных устройств и может быть использовано при разработке специализированных вычислительных устройств обработки цифровых данных на борту боевых летательных аппаратов.
Известна (RU, патент №2413655) модульная система авионики самолета, содержащая процессорные модули, несколько блоков, расположенных в разных местах в самолете и объединенных в сеть. Блоки содержат два основных процессорных модуля (СРМ1, СРМ2) и два модуля ввода-вывода (IOM1, IOM2). Модули ввода-вывода (IOM1, IOM2) служат интерфейсами для подлежащих управлению систем, для управления и промежуточного хранения данных, поступающих в блок или выдаваемых из него. Каждый основной процессорный модуль (СРМ1, СРМ2) имеет независимую прямую связь с каждым IOМ модулем и СРМ модулем и в каждом основном процессоре несколько независимых системных программ работают под управлением операционной системы.
Система позволяет исключить монтажную шину, которая требуется в известных системах. Недостатком этой системы является ограничение ее функциональных возможностей, ориентированных в основном на реализацию функций управления и контроля.
Наиболее близким аналогом предлагаемого изобретения является (RU, патент №2413280) платформа интегрированной модульной авионики (ИМА), выполненная в виде одного или двух крейтов (здесь и в дальнейшем термин «крейт» употребляется в качестве синонима термина «контейнер» или «герметизированный корпус»), содержащих по две идентичных подсистемы. В состав каждой подсистемы входят коммутатор и две пары вычислительных модулей. Вычислительные модули внутри каждой пары соединены между собой первыми группами входов-выходов. При этом первые вычислительные модули каждой пары в каждой подсистеме взаимно соединены друг с другом вторыми группами входов-выходов, а также независимо соединены соответствующими группами входов-выходов с коммутатором своей подсистемы и коммутатором второй подсистемы крейта. Вторые вычислительные модули каждой пары в каждой подсистеме также взаимно соединены друг с другом соответствующими группами входов-выходов. При наличии в платформе ИМА двух крейтов коммутаторы первых подсистем каждого крейта взаимно соединены друг с другом соответствующей группой входов-выходов. Аналогичную взаимосвязь имеют коммутаторы и вторых подсистем крейтов.
Вычислительные модули платформы ИМА в ближайшем аналоге являются универсальными вычислительными модулями. При этом между модулями каждой пары осуществлено разделение исполняемых функций:
- первый модуль пары осуществляет прием информации и выдачу сигналов управления во внешние системы летательного аппарата (ЛА) по каналам с интерфейсом ARINC 429, обрабатывает информацию, поступающую от систем авионики с интерфейсом ARINC 664 по стандарту AFDX (Avionics Full Duplex Switched Ethernet), и обеспечивает реализацию алгоритмов работы основных систем авионики самолета (например, системы самолетовождения, технического обслуживания и управления общесамолетным оборудованием). Дополнительно в первом модуле каждой пары реализуется функция распределенного программного автомата контроля и реконфигурации. Этот программный автомат производит мониторинг работы всех пар модулей платформы ИМА и обеспечивает взаимный обмен результатами вычислений и результатами встроенного контроля в реальном масштабе времени. На основе сравнения результатов работы всех модулей распределенный программный автомат контроля и реконфигурации исключает из работы неисправные модули и модули с искаженными результатами вычислений;
- второй модуль пары осуществляет прием информации от датчиков летательного аппарата и выдачу сигналов управления на исполнительные механизмы по каналам с интерфейсом ARINC 825 (CAN), а также обеспечивает реализацию программных средств встроенного контроля в каждом вычислительном модуле каждой пары. Дополнительно второй модуль первой пары модулей подсистемы осуществляет сравнение графической информации, обработанной в первой и второй парах модулей подсистемы, и при ее совпадении выдает эти данные на систему индикации ЛА.
Основная задача, решаемая платформой ИМА в прототипе, заключается в обеспечении возможности многократного дублирования работы подсистемы, что существенно уменьшает вероятность отказа и соответственно гарантирует надежность ее работы на борту самолета. В частности, при использовании одного крейта надежность выполнения функций, реализуемых подсистемой при эксплуатации на борту ЛА, повышается в два раза, а при использовании в предлагаемой платформе ИМА двух крейтов - в четыре раза.
В качестве недостатков ближайшего аналога, предопределенных принципами ее построения (конструкцией), следует указать следующие:
- применение только универсальных вычислительных модулей накладывает ограничения на функциональные возможности платформы ИМА, которые фактически в основном ориентированы на реализацию функций управления и контроля на борту ЛА гражданского назначения с использованием интерфейса AFDX;
- выдача сигналов управления (например, на исполнительные механизмы летательного аппарата) производится всеми парами вычислительных модулей (ВМ6 и ВМ7, ВМ8 и ВМ9, ВМ10 и ВМ11, ВМ12 и ВМ13) первого крейта, а также всеми парами вычислительных модулей (ВМ19 и ВМ20, ВМ21 и ВМ22, ВМ23 и ВМ24, ВМ25 и ВМ26) второго крейта, поэтому необходимо реализовать высоконадежную программно-аппаратную систему контроля, которая в реальном масштабе времени исключит приход на исполнительные механизмы сигналов управления более чем от одной пары вычислительных модулей. При этом чем выше уровень резервирования системы, тем сложнее реализация системы контроля;
- применена жесткая схема дублирования модулей, которая накладывает значительные ограничения на варианты реконфигурации при проектировании системы;
- большие накладные расходы на передачу информации между модулями разных крейтов и подсистем. Например, при передачи информации от ВМ 7 в ВМ 20 требуется пройти 4 транзитных узла (ВМ 6, Ком 4, Ком 17, ВМ 19).
При разработке предлагаемых в изобретении вариантов платформы интегрированной модульной авионики боевых комплексов (ИМА БК) учитывались следующие положения.
1. Отличительной чертой бортовой сети ЛА Fibre Channel, используемой для поддержки функций управления, отображения и контроля, является доставка сообщений между абонентами при гарантированном непревышении требуемого времени доставки. В связи с этим бортовая сеть FC, обеспечивающая функционирование платформы ИМА боевого ЛА, в дополнение к стандартным требованиям Fibre Channel должна функционировать с учетом основных положений стандарта ARINC 664 и обеспечивать доставку сообщений между оконечными устройствами сети за определенное время, худшее значение которого может быть рассчитано на этапе проектирования сети. При этом бортовая сеть FC становится детерминированной сетью Fibre Channel. Детерминированная сеть Fibre Channel может быть резервированной.
2. Для боевых ЛА характерны требования минимизации как номенклатуры, так и габаритных характеристик применяемых электронных компонентов вычислительной платформы ИМА.
3. Для платформ ИМА БК характерно требование обеспечения возможности их расширяемости и масштабирования, обусловленное необходимостью обеспечения соответствия характеристик ИМА БК неизбежным изменениям тактико-технических требований, предъявляемых к ЛА, а также обеспечения соответствия характеристик ИМА неизбежным модернизациям ЛА в течение их жизненного цикла.
Технический результат, на достижение которого направлено изобретение, заключается в расширении функциональных возможностей платформы ИМА БК при одновременном повышении уровня ее надежности, гибкости реконфигурации и упрощении технологии применения (в том числе в части программного обеспечения и организации информационных потоков), используемых при реализации вычислительных комплексов, базирующихся на данной платформе ИМА БК.
Указанный технический результат достигается тем, что в платформе интегрированной модульной авионики боевых комплексов, содержащей, по меньшей мере, один крейт, который включает, по меньшей мере, один модуль коммутатор и универсальный вычислительный модуль, каждый крейт дополнительно снабжен детерминированным сетевым каналом информационного обмена, модулем графического контроллера, модулем ввода/вывода, каналом телевидеоизображения, соединенным со входами-выходами модуля графического контроллера, каналом информационного обмена, соединенным со входами-выходами модуля ввода/вывода, при этом модуль коммутатор соединен входами-выходами посредством сетевого канала информационного обмена с модулем графического контроллера, с модулем ввода/вывода, с универсальным вычислительным процессорным модулем и с сопрягаемым оборудованием, при этом каждый модуль интегрированной модульной авионики боевых комплексов содержит встроенный в модуль независимый программируемый контроллер, предназначенный для контроля состояния модуля, управления электропитанием модуля, организации взаимодействия по сервисной шине, а все независимые программируемые контроллеры модулей соединены входами-выходами между собой посредством сервисного канала информационного обмена, предназначенного для обмена между всеми модулями платформы информацией о состоянии модулей и выдачи управляющих команд, на изменение состояния модуля.
Платформа может содержать дополнительный универсальный вычислительный модуль в каждом из крейтов.
Платформа может содержит дополнительный модуль коммутатор в каждом из крейтов.
Достижение технического результата в части:
- расширения возможности применения платформы интегрированной модульной авионики боевых комплексов (ИМА БК), по сравнению с ближайшим аналогом осуществляется за счет введения в состав платформы модуля графического контроллера и модуля ввода-вывода, что позволяет адаптировать платформу под решение более широкого круга задач;
- упрощения технологии применения достигается за счет введения в состав платформы ИМА БК дополнительных модулей: модуля ввода/вывода, соединенного с каналом информационного обмена, и модуля графического контроллера, соединенного с каналом телевидеоизображения;
- повышения уровня надежности, обеспечено использованием независимого программируемого контроллера в каждом модуле и сервисного канала информационного обмена, объединяющего все модули платформы ИМА БК в единую сеть;
- повышения гибкости реконфигурации достигается за счет подключения всех модулей платформы ИМА БК к детерминированному сетевому каналу информационного обмена и, одновременно, к сервисному каналу информационного обмена.
При этом используемые в реализуемой для решения поставленных задач платформе ИМА БК модули могут быть введены в состав каждого крейта платформы ИМА БК в любой комбинации и необходимом пользователю количестве, ограничиваемом наличием доступных посадочных мест для данного типа модуля в крейте, что обеспечивает расширение функциональных возможностей, а также обеспечение надежности за счет обеспечения возможности дублирования крейтов в составе платформы ИМАБК.
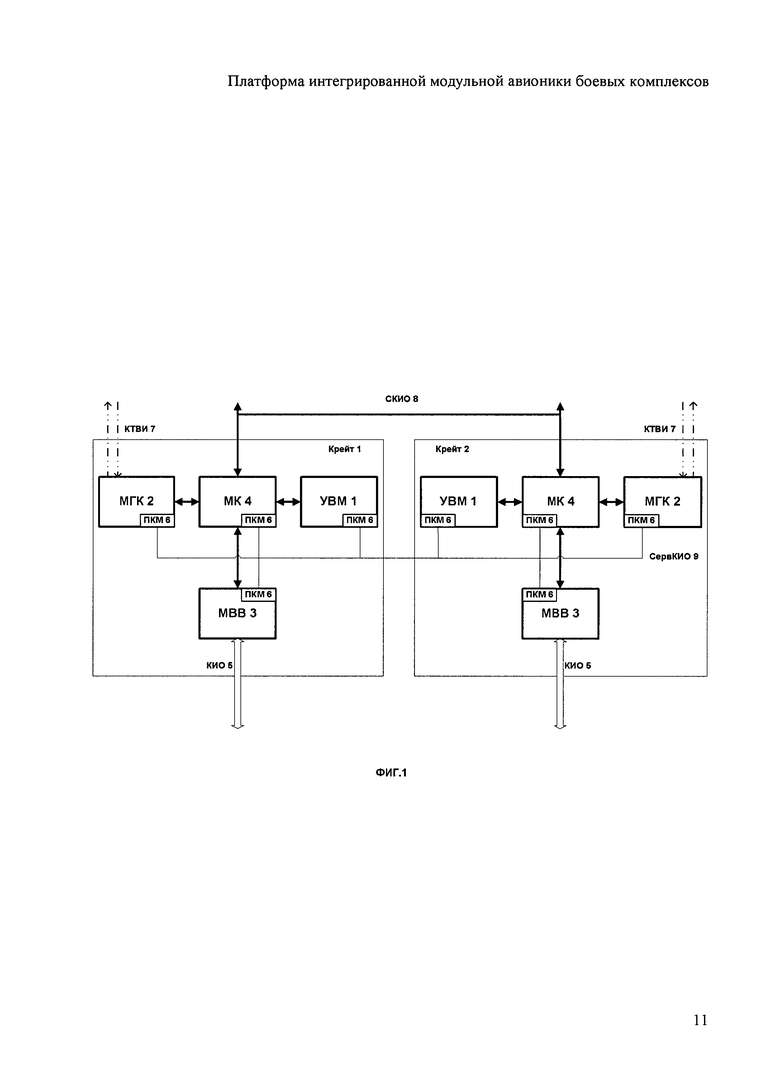
Изобретение поясняется графическими материалами, где на фиг. 1 представлена базовая схема двукрейтовой вычислительной системы на базе ИМА БК; на фиг. 2 - развитие базовой схемы в части внедрения дополнительного универсального вычислительного модуля; на фиг. 3 - внедрение дублирующего модуля коммутатора.
Платформа интегрированной модульной авионики боевых комплексов включает следующие элементы:
Универсальный вычислительный процессорный модуль - УВМ 1;
Модуль графического контроллера - МГК 2;
Модуль ввода/вывода - МВВ 3;
Модуль коммутатор - МК 4;
Канал информационного обмена - КИО 5;
Программируемый контроллер модуля - ПКМ 6;
Канал телевидеоизображения - КТВИ 7;
Детерминированный сетевой канал информационного обмена - СКИО 8;
Сервисный канал информационного обмена - СервКИО 9.
Универсальный вычислительный процессорный модуль (УВМ) 1 представляет собой универсальный процессорный модуль, построенный на базе многоядерного процессора, предназначенный для решения вычислительных задач. Он соединен по СКИО 8 входом/выходом со всеми МГК 2, МВВ 3 и МК 4 своего крейта и другим сопрягаемым оборудованием (например, локатор, система автоматического управления, индикаторы и т.д., что не входит в состав ИМА БК).
Модуль графического контроллера 2 (МГК) представляет собой процессорный модуль, предназначенный для решения задач работы с графическим и видеоизображением. Он соединен по СКИО 8 входом/выходом со всеми УВМ 1, МВВ 3 и МК 4 и по КТВИ 7 входом/выходом с сопрягаемым оборудованием.
Модуль ввода/вывода (МВВ) 3 представляет собой устройство сопряжения ИМА БК с бортовыми линиями связи (например, МКИО, ДНК), осуществляющее прием, контроль и выдачу информации. Он соединен по СКИО 8 входом/выходом со всеми УВМ 1, МГК 2 и МК 4, и по КИО 7 входом/выходом с сопрягаемым оборудованием (не входит в состав ИМА БК).
Модуль коммутатор (МК) 4 представляет собой устройство, предназначенное для коммутации потоков информации между всеми модулями из состава ИМА БК и сопрягаемым оборудованием. Он соединен через входы/выходы по СКИО 8 с сопрягаемым оборудованием и другими МК 4 в составе ИМА БК и через входы/выходы по СКИО 8 с со всеми УВМ 1, МГК 2, МВВ 3 в своем крейте. Количество МК 4 информации может быть от одного до К, и определяется необходимой надежностью (степень резервирования) и/или количеством возможных абонентов. При этом МК 4 должны быть связаны между собой по СКИО 8.
Канал КИО 5 представляет собой линии связи и информационного обмена, например, по ГОСТ 18977-79, последовательному коду, по параллельному коду, мультиплексные и другие.
Программируемый контроллер модуля (ПКМ) 6 представляет собой встроенный в модуль независимый контроллер, предназначенный для контроля состояния модуля, управления электропитанием модуля, организации работы по сервисной шине. Он соединен по СервКИО 9 входами/выходами со всеми ПКМ других модулей из состава ИМАБК.
Канал теле-видео изображения (КТВИ) 7 представляет собой линии связи, по которым осуществляется трансляции видеоизображения по стандарту ARTNC 818.
Каналы СКИО 8 представляют собой полнодуплексные линии связи и информационного обмена по технологии FC (Fiber Channel).
Канал СервКИО 9 представляет собой высоконадежные линии связи и информационного обмена шинного (магистрального) типа, предназначенные для обмена информации о состоянии абонентов и управляющих команд, например CAN (Controller Area Network).
ИМА БК работает следующим образом.
Информация от сопрягаемого оборудования поступает по СКИО 8 на вход МК 4 первого и второго крейта. Далее с выходов МК 4 по СКИО 8 она поступает на входы УВМ 1 и МГК 2 своего крейта, а также может поступать на входы МВВ 3 для дальнейшей выдачи по КИО 5 в сопрягаемое оборудование. Параллельно информация может поступать по КИО 5 на входы МВВ 3. Оттуда она по СКИО 8 через МК 4 поступает на входы УВМ 1 и МГК 2, а также на вход МК 4 другого крейта.
В УВМ 1 находятся программы, использующие поступающие входные данные для своих алгоритмов. Результаты работы программ через выходы УВМ 1 по СКИО 8 выдаются или в сопрягаемое оборудование по СКИО 8 через МК 4, или по КИО 5 через МВВ 3 или в МГК 2, или в любой комбинации вышеуказанных случаев.
Видеоинформация от сопрягаемого оборудования поступает по КТВИ 7 на вход МГК 2. По имеющимся в МГК 2 алгоритмам, с учетом информации, поступившей от УВМ 1 и от сопрягаемого оборудования по КИО 5 через МВВ 3, происходит обработка и анализ изображения. В результате работы получается обработанная телевидеоинформация, которая выдается в сопрягаемое оборудование через КТВИ 7 и/или параметрическая информация, которая выдается через СКИО 8 в УВМ 1 и/или в другие системы по СКИО 8 через МК 4 и/или по КИО 5 через МВВ 3.
В состав каждого модуля входит ПКМ 6. Все ПКМ 6 входами/выходами объединены в единую сеть через СервКИО 9. ПКМ контролирует работоспособность своего модуля (включая ПО: зависание и т.п.) и выдает информацию о его состоянии в ПКМ других модулей через СервКИО 9. В случае обнаружения неисправностей в модуле ПКМ может отключить его питание или дать команду на перезагрузку. Если неисправность модуля нарушила работоспособность ПКМ 6 или произошел отказ самого ПКМ 6, то по отсутствию информации или по неправильной ее выдачи от ПКМ этого модуля, ПКМ 6 других модулей могут принять решение об отключении питания данного модуля. Решение принимается путем голосования.
Реализации платформы ИМА БК на базе двух идентичных крейтов поддерживает возможность дублирования крейтов на борту ЛА, при этом внешние связи функциональных модулей в крейтах должны быть продублированы.
МК 4 содержит множество заранее созданных вариантов конфигурации сети СКИО 8. Варианты конфигурации сменяются при наступлении определенных условий задаваемых разработчиком системы (например, отказы отдельных модулей или сопрягаемого оборудования).
Для повышения надежности и отказоустойчивости в платформе ИМА БК из двух крейтов принят следующий алгоритм работы МК 4.
1. Вся информация, поступающая на вход МК 4 по СКИО 8 (как поступающая от сопрягаемого оборудования, так и от УВМ 1, МГК 2 и МВВ 3), помимо передачи непосредственно адресату, передается по СКИО 8 в МК 4 другого крейта. Таким образом, обеспечивается полное дублирование всей информации, поступающей на вход МК 4 каждого крейта, что обеспечивает систему всей информацией даже в случае обрыва части проводов от бортовых систем к конкретному МК 4.
2. В случае штатной работы, один крейт, по заранее определенным правилам, определяется как основной, а другой как резервный. За модулями из этого крейта закрепляется право выдавать информацию. Информация выдается в другие системы по СКИО 8 через МК 4 своего крейта, а также передается в МК 4 другого крейта для параллельной выдачи тому же потребителю и в дублирующий модуль, из состава второго крейта, для обеспечения синхронизации работы модулей.
В случае отказа любого из модулей в составе основного крейта аналогичный модуль в резервном крейте становится ведущим. Потоки информационного взаимодействия регулируемые МК 4 адаптируются для работы в требуемой конфигурации.
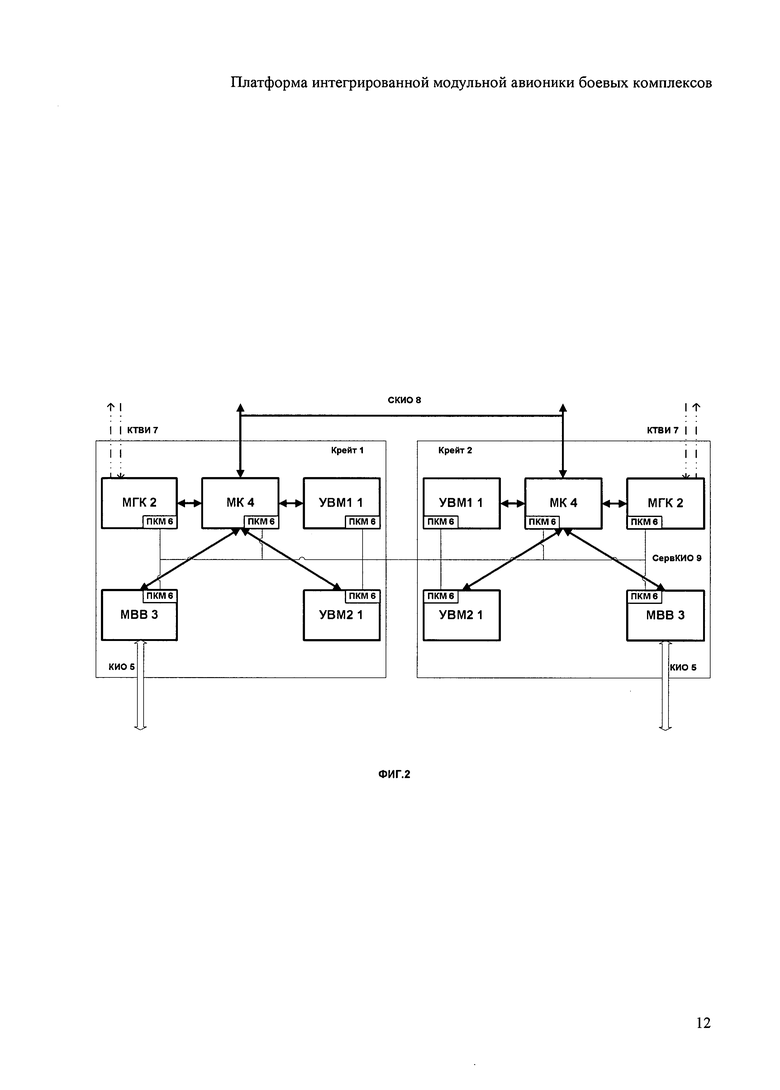
На фиг. 2 представлен вариант платформы ИМА БК, базирующийся на решениях, использованных в варианте, приведенном на фиг. 1, при расширении в каждой подсистеме количества универсальных вычислительных процессорных модулей до двух единиц.
Основная цель ввода дополнительного УВМ 1 - поддержка возможности скользящего резервирования (дублирования) УВМ подсистемы. В случае достаточных вычислительных мощностей УВМ для выполнения всех функциональных задач, второй УВМ в подсистеме может полностью дублировать первый. В противном случае задачи должны быть разделены для выполнения на 2 УВМ, что при отказе одного из УВМ в ходе функционирования потребует реализации функционально урезанной конфигурации системы с одним работоспособным УВМ и соответствующей переконфигурации сети СКИО 8.
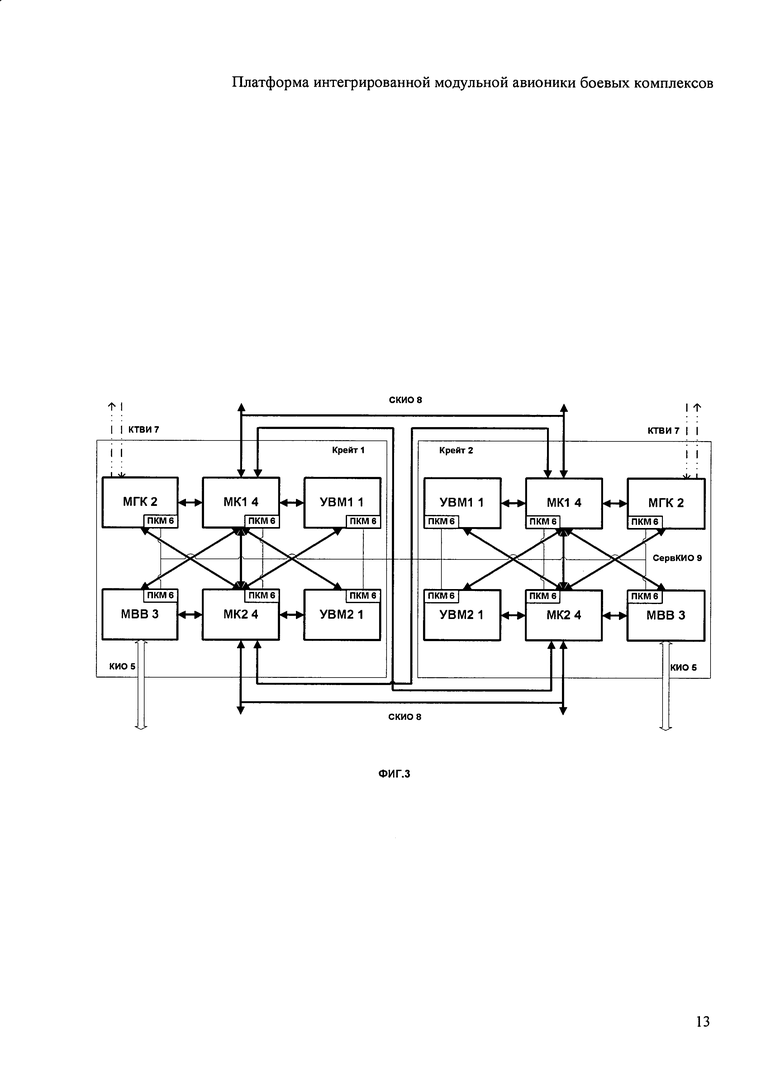
На фиг. 3 представлен вариант платформы ИМА БК, базирующийся на решениях, использованных в вариантах, приведенных на фиг. 1 или фиг. 2, при вводе в каждую подсистему, размещенную в крейте, в дополнение к первому (основному) МК 4 второго (дополнительного) МК 4.
Целью ввода дополнительного модуля коммутатора в подсистему является обеспечение возможности резервирования основного МК 4 подсистемы. При этом основной МК 4 первой подсистемы должен быть соединен по СКИО 8 со вторым МК 4 во второй подсистеме, и наоборот. Подключение внешних систем по СКИО 8 должно быть полностью идентично как для основных МК 4 в каждом из крейтов, так и для дополнительных. Это позволяет, в случае отказа любого из МК 4 в одном из крейтов, организовать полное дублирование потоков информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамической реконфигурации вычислительных комплексов модульной архитектуры | 2018 |
|
RU2694008C1 |
| Блок вычислительный | 2019 |
|
RU2707701C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2009 |
|
RU2413280C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СВЯЗИ И ОБМЕНА ДАННЫМИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2829898C1 |
| ПАНОРАМНЫЙ АВИАЦИОННЫЙ ИНДИКАТОР | 2022 |
|
RU2800102C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
Изобретение относится к технике обработки цифровых данных с помощью программируемых специализированных вычислительных устройств и может быть использовано при разработке специализированных вычислительных устройств обработки цифровых данных на борту боевых летательных аппаратов. Технический результат - повышение надежности и гибкости реконфигурации платформы интегрированной модульной авионики боевых комплексов (ИМА БК). Платформа ИМА БК включает следующие элементы: универсальный вычислительный процессорный модуль - УВМ 1; модуль графического контроллера - МГК 2; модуль ввода/вывода - МВВ 3; модуль коммутатор - МК 4; канал информационного обмена - КИО 5; программируемый контроллер модуля - ПКМ 6; канал телевидеоизображения - КТВИ 7; сетевой канал информационного обмена - СКИО 8; сервисный канал информационного обмена - СервКИО 9. 2 з.п. ф-лы, 3 ил.
1. Платформа интегрированной модульной авионики боевых комплексов, содержащая по меньшей мере один крейт, который включает по меньшей мере один модуль коммутатор и универсальный вычислительный модуль, отличающаяся тем, что каждый крейт дополнительно снабжен детерминированным сетевым каналом информационного обмена, модулем графического контроллера, модулем ввода/вывода, каналом телевидеоизображения, соединенным со входами-выходами модуля графического контроллера, каналом информационного обмена, соединенным со входами-выходами модуля ввода/вывода, при этом модуль коммутатор соединен входами-выходами посредством сетевого канала информационного обмена с модулем графического контроллера, с модулем ввода/вывода, с универсальным вычислительным процессорным модулем и с сопрягаемым оборудованием, при этом каждый модуль интегрированной модульной авионики боевых комплексов содержит встроенный в модуль независимый программируемый контроллер, предназначенный для контроля состояния модуля, управления электропитанием модуля, организации взаимодействия по сервисной шине, а все независимые программируемые контроллеры модулей соединены входами-выходами между собой посредством сервисного канала информационного обмена, предназначенного для обмена между всеми модулями платформы информацией о состоянии модулей и выдачи управляющих команд, на изменение состояния модуля.
2. Платформа по п. 1, отличающаяся тем, что содержит дополнительный универсальный вычислительный модуль в каждом из крейтов.
3. Платформа по п. 1, отличающаяся тем, что содержит дополнительный модуль коммутатор в каждом из крейтов.
| Центрифуга для выделения полезных ископаемых по их удельным весам | 1953 |
|
SU108868A1 |
| Комбинированный способ основной обработки почвы и почвообрабатывающий агрегат для его осуществления | 1958 |
|
SU125422A1 |
| МОДУЛЬНАЯ СИСТЕМА АВИОНИКИ САМОЛЕТА | 2006 |
|
RU2413655C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

