Изобретение относится к испытаниям транспортных средств на надежность (безотказность и долговечность) и касается автоматического контроля уровня нагружения транспортных средств с учетом логистики измерения дорожных условий испытаний.
Известно, что полученные по результатам испытаний (эксплуатации) показатели надежности транспортных средств зависят не только от их качества, но и не в меньшей мере от условий, в которых их испытывают или эксплуатируют.
В настоящее время условия испытаний транспортных средств регламентируют видами дорог и распределением по ним общего пробега [1], характеристики которых постоянно изменяются в зависимости от времени года, метрологических условий и интенсивности движения, и оценивают их через коэффициент суммарного сопротивления давлению ψj каждой j-й дороги [2], [3] и [4], определяемого расходом топлива, затрачиваемого на преодоление суммарных сил сопротивления движению транспортного средства, и реализуемой скоростью движения, а мера их воздействия на транспортное средство - через накопленную величину уровня нагружения по расчетной зависимости (патент RU №2090855, кл. С1 6 G01M 17/00, 1997 [5], принятый за прототип):

где Wj - уровень нагружения на j-й дороге;
Sj - пробег на j-й дороге, км;
ψj - коэффициент суммарного сопротивления движению, определяемый по выражению:

где  - средний расход топлива, л/100 км;
- средний расход топлива, л/100 км;
 - средняя скорость движения на j-й дороге, км/ч;
- средняя скорость движения на j-й дороге, км/ч;
n - коэффициент пропорциональности, характерный для каждого типа транспортного средства повышенной точности.
Недостаток такой регламентации при практической реализации способа состоит в ручной обработке исходных данных, получаемых по результатам испытаний ТС на j-x видах дорог в виде учета времени непрерывного движения, пройденного пути и расхода топлива, расчете на их основе скорости движения, коэффициента суммарного сопротивления движению ψj, уровня нагружения Wj и учете текущей накопленной его величины, сопоставлении с нормативным значением WjH, представленным в виде прямой в функции нормативного пробега SH, по видам j-x дорог [2] и оценке степени выполнения программы испытаний, что сопровождается повышенными затратами времени выполнения указанных операций, появлением неизбежной погрешности выполнения расчета и возможным участием человеческого фактора, приводящим к понижению качества оценки свойств надежности.
Реализующее способ устройство (патент RU №2063887 C1 В60К 41/28, 1996, принятый за прототип) [6] содержит включатель бортовой сети, датчики контроля режима работы двигателя и его систем, тормозов и трансмиссии, используемые для автоматизации управления транспортным средством.
Известное устройство имеет ограниченные функциональные возможности и не учитывает уровень воздействия внешней среды: профиль опорной поверхности и ее состояние, температуру наружного воздуха, прицепную нагрузку и др.
Сущность изобретения заключается в следующем.
Расширение функциональных возможностей способа за счет автоматического контроля параметров режима нагружения ТС с их регистрацией и периодическим по времени выведением на монитор блока принятия решения для визуального контроля водителем текущей остаточной информации уровня нагружения ТС и пробега на каждом виде j-x испытательных дорог, выполняемого для оценки надежности в условиях постоянно изменяющихся характеристик дорог, в которых транспортное средство перемещают по j-й опорной поверхности в ведущем неустановившемся режиме движения, определенным профилем и несущей способностью опорной поверхности, регистрируют средний расход топлива в л/100 км с помощью датчиков расхода топлива ДТ и скорости движения ДС с последующей их передачей в процессорный модуль, с которого, при внесении в него значений коэффициента n повышенной точности формируется текущее среднее значение коэффициента ψj в заданном повторяющемся интервале времени, а с учетом выполненного пробега по датчику пути ДS - регистрируется величина уровня нагружения Wj с последующим сравнением с заданной нормативной величиной WjH и на этой основе устанавливается его остаточная величина ΔWj на каждой j-й дороге при переходе с одного вида дорог на другой, при этом устройство для автоматического контроля уровня нагружения включается в работу одновременно с пуском двигателя через кнопку канала связи А блока принятия решения с последующей передачей информации в процессорный модуль, блок формирования уровня нагружения, блок накопления уровня нагружения, блок сравнения значений параметра Wj с его нормативом и выводом на монитор блока принятия решения остаточных значений параметра Wj;
при переходе испытаний на булыжную дорогу оператор включает кнопку канала связи Б, а устройство обеспечивает передачу информации по указанным алгоритмам канала связи А;
при переходе на грунтовую испытательную дорогу и включения оператором кнопки канала связи Г устройство обеспечивает передачу информации, помимо указанных по каналам связи А и Б, дополнительно из процессорного модуля в блок распознавания трех видов грунтовых дорог, обозначенных границами значений показателя ψj и далее в блок формирования уровня нагружения W.
Совокупность признаков автоматического контроля, формирования и передачи непосредственно контролируемых и оцениваемых параметров для визуального и аппаратного определения изменяющегося остаточного уровня нагружения ТС в зависимости от пробега на каждом виде (пяти) испытательных дорог и устройство с определенными операционными блоками, реализующее эти условия, позволяет считать заявленные объекты соответствующими критерию «новизна».
Совокупность последовательных операций, включающих инструментальную регистрацию с помощью датчиков скорости движения и расхода топлива в процессорном модуле, с предварительно введенным в него значением коэффициента n повышенной точности, раздельное формирование по формуле (2) среднего значение показателя ψj, за каждые 10 с движения ТС и передачу его через кнопочные переключатели каналов связи А, Б и Г блока принятия решения в блок формирования по формуле (1) накопленной величины уровня нагружения Wj при предварительном поступлении с датчика пути значения выполненного пробега Sj, при этом включение по каналу связи А устанавливается с одновременным включением бортовой сети, по каналу связи Б - переключением кнопки при переходе на булыжную дорогу, а по каналу связи Г - через блок распознавания каждого в отдельности вида грунтовых дорог и далее, в зависимости от включенного переключателя блока принятия решения, трансформацию в блок сравнения значений параметра Wj и последующее выведение на монитор блока принятия решения его остаточных значений, что позволяет считать заявленное решение соответствующими критерию «изобретательский уровень».
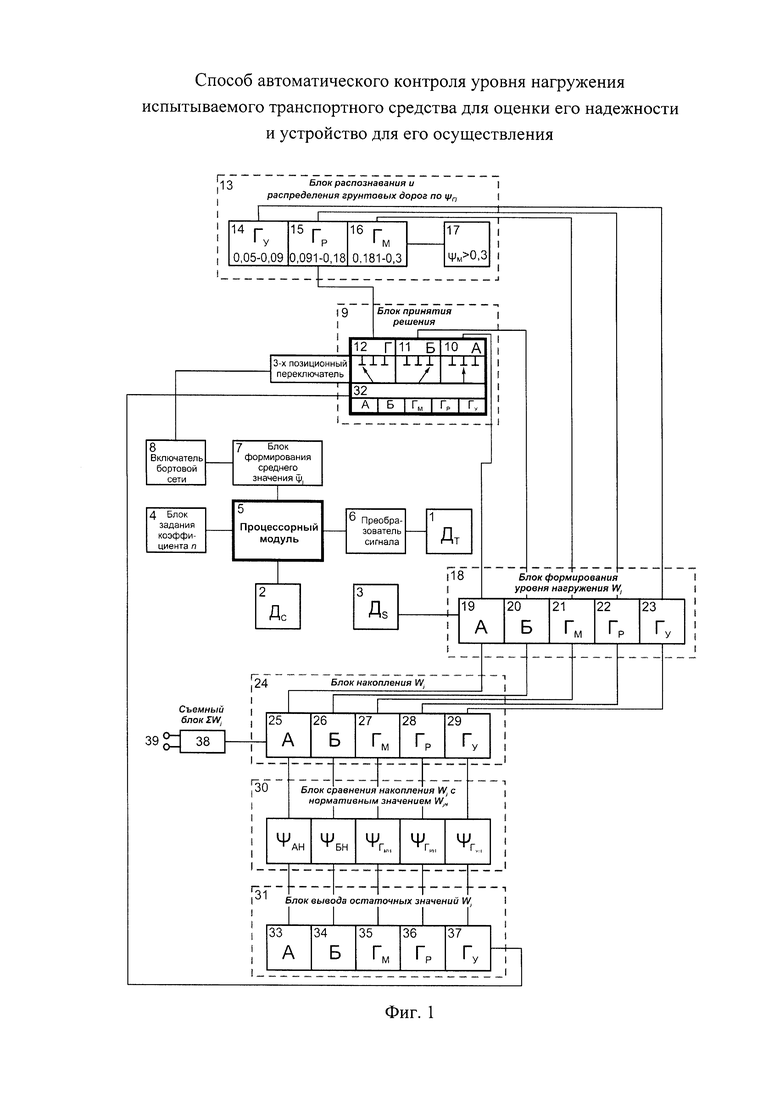
На фиг. 1 представлена общая функциональная схема устройства автоматического контроля уровня нагружения.
Устройство, реализующее способ автоматического контроля уровня нагружения, состоит из датчиков расхода топлива ДТ 1, скорости движения ДС 2 и пройденного пути ДS 3, блока задания коэффициента n 4, характерного для каждого типа ТС, процессорного модуля ПМ формирования коэффициента суммарного сопротивления движению ψj 5, к которому подключены датчик ДС и через преобразователь 6 датчик ДТ, блока формирования среднего значения сигнала 7 с интервалом Δt=10с, включателя бортовой сети 8, 3-х позиционного переключателя блока принятия решения 9 с кнопочными переключателями каналов связи А 10, Б 11 и Г 12, блока распознавания вида грунтовых дорог 13 с их выходами значения ψj по грунтовой дороге Гу удовлетворительного состояния 14 в диапазоне 0,05-0,09, по разбитой грунтовой дороге Гр 15 в диапазоне 0,091-0,18 и размокшей грунтовой дороге Гм 16 в диапазоне 0,181-0,3 с сигнализатором датчика превышения допустимой величины ψM>0,3 17, блока формирования уровня нагружения Wj 18 по видам дорог с подблоками: А - 19, Б - 20, Гм - 21, Гр - 22, Гу - 23 с использованием информации, поступающей с датчика ДS 3 и процессорного модуля 5, блока накопления уровня нагружения Wj 24 по видам дорог: А - 25, Б - 26, Гм - 27, Гр - 28, Гу - 29, блока сравнения 30 текущих значений показателя Wj с нормативными значениями WjH, блока вывода остаточных значений Wj 31 на секторы монитора 32 блока принятия решения 9 по видам дорог: А - 33, Б - 34, Гм - 35, Гр - 36, Гу - 37 и съемный блок суммарного уровня нагружения Wj 38 по всем видам j-x дорог с выводом на канал 39.
Устройство, реализующее способ, работает следующим образом.
При включении водителем бортовой сети включателем 8 и пуска двигателя датчики 1, 2 и 3 и процессорный модуль 5 переводятся в работоспособное состояние. Перед началом движения каждого образца одноразово через блок задания коэффициента n повышенной точности 4 в процессорный модуль 5 в соответствии с зависимостью (2) вводится числовое значение коэффициента n.
С началом движения по А-дороге без участия водителя в процессорном модуле 5 формируется текущее значение показателя ψj, среднее значение которого за время Δt формируется в блоке 7 и передается по каналу связи А 10 в блок принятия решения 9, при закрытых каналах связи 11 и 12, и далее в подблок А 19 блока формирования уровня нагружения 18, где при поступлении информации с датчика ДS 3 по зависимости (1) формируется значение показателя WA, которое передается в подблок А 25 блока накопления уровня нагружения 24 и далее в блок сравнения 30 значения показателя WA с нормативным значением WAH и выводом через блок 31 на сектор 33 монитора 32 значений WA.
При переходе на дорогу с булыжным покрытием (Б-дорогу) оператором включается канал связи Б блока принятия решения 9, при котором канал связи А 10 закрывается, а процессорный модуль продолжает работу и передает информацию, аналогично каналу связи А 10, в блок формирования уровня нагружения 18 в подблок Б 20 и далее в подблок Б 26 блока 24.
При переходе на грунтовую дорогу (Г-дорогу) оператором включается канал связи Г блока принятия решения 9, при котором канал связи Б 11 закрывается при закрытом канале связи А, а процессорный модуль продолжает работать в установленном режиме и передает информацию по каналу связи Г 12 в блок распознавания и распределения грунтовых дорог 13, в котором в зависимости от среднего значения ψГj, сформированном за время Δt=10c, выполняется распределение в подблоки 14, 15 и 16 со значением показателя ψj в диапазоне соответственно: ψГУ - 0,05-0,09, ψГР - 0,091-0,18, ψМ - 0,181-0,30. Например, из процессорного модуля 5 значение ψj, равное 0,065, соответствующее дороге ГУ, поступает в блок 13, в котором это значение распознается по диапазону ψj и адресуется в блок 14 с последующей его передачей в подблок 23 блока формирования уровня нагружения 18 и далее в блок накопления уровня нагружения 24 по линии ГУ 29, блок сравнения 30 значений Wj с нормативными значениями, блок вывода остаточных значений Wj 31 и монитор 32 по линии связи 37.
Нормативные значения Wj по видам дорог в соответствии с [2] определены значениями: WAH=276, WБH=621, WГУм=684, WГРм=456 и WMн=828 н⋅км при суммарном их значении, равном 2865 н⋅км.
При движении транспортного средства на одной их указанных грунтовых дорог могут возникнуть небольшие участки других видов этих дорог. И если они встречаются на пути движения за время формирования среднего значения ψj, равного 10с и более, то их результаты в блоке 13 перераспределяются в соответствии с заданным диапазоном показателя ψj по видам грунтовых дорог, что придает получаемым результатам по Wj повышенную точность.
После завершения пробега ТС по грунтовым дорогам за смену оператор переводит блок принятия решения из положения канала связи Г в канал связи А. То же самое происходит автоматически после выключения блока питания и повторного его включения. Кроме того, блок 24 одновременно передает накапливаемую информацию по Wj каждой j-й дороги в съемный блок суммарного уровня нагружения ΣWj 38 с выводом его значения на монитор 32, при этом съемный блок 38 имеет каналы 39 для компьютерного съема информации по Wj.
В процессе пробеговых испытаний ТС по размокшей грунтовой дороге М возможно появление участков с значением ψМ, превышающим предельное значение, равное 0,3. В этом случае включается аварийный сигнализатор датчика 17, предписывающий необходимость оперативного перевода Тс на более легкий участок этой дороги.
Использование автоматического контроля уровня нагружения испытываемого транспортного средства для оценки его надежности при инструментальной регистрации первичными преобразователями расхода топлива и скорости движения и автоматического расчета коэффициента суммарного сопротивления движению ψj, при повышенной точности задания коэффициента пропорциональности n, пяти видов испытательных дорог и определения показателя уровня нагружения Wj, его контроля в ходе испытаний и оценка остаточной величины для принятия решения обеспечивают по сравнению с известным способом определения параметров ψj и Wj, базирующимся на их расчете вручную с использованием исходных данных пониженной точности, особенно при расчете средней скорости движения, и требующий повышенных трудозатрат при использовании бумажных носителей информации, не исключая человеческий фактор, повышенную точность и универсальность определения уровня нагружения при испытаниях независимо от места, времени, опыта и субъективной оценки исполнителей, а также оперативность получения данных по Wj, обеспечивая высокое качество оценки условий испытаний, а, следовательно, полученных результатов по параметрам надежности AT.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. ОТ 37.001.472-88. Приемочные испытания автотранспортных средств. Типовая программа испытаний. - Введ. 1989-01-01. - М.: НАМИ, 1989.
2. ОТ 37.001.520-96. Категории испытательных дорог. Параметры и методы их определения. - Введ. 1997-07-01. - М.: «Дорожный транспорт», ТК 56, 1997.
3. Патент RU №2011955 С1 G01М 17/00 от 30.04.1994 г.
4. Патент RU №2561647 С1 G01М 17/007 от 27.08.2015 г.
5. Патент RU №2090855 C1 G01М 17/00 от 20.09.1997 г.
6. Патент RU №2063887 C1 В60К 41/28 от 20.07.1996 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ КОНТРОЛЛЕР РЕГИСТРАЦИИ УРОВНЯ НАГРУЖЕНИЯ ИСПЫТЫВАЕМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2024 |
|
RU2830917C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ОСТАТОЧНОГО РЕСУРСА ТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ЕГО ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2761126C1 |
| СПОСОБ СТЕНДОВЫХ ИСПЫТАНИЙ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОЛГОВЕЧНОСТЬ | 2001 |
|
RU2181484C1 |
| СПОСОБ НОРМИРОВАНИЯ, КОНТРОЛЯ И КОРРЕКТИРОВКИ УРОВНЯ НАГРУЖЕНИЯ ИСПЫТЫВАЕМЫХ ТРАНСПОРТНЫХ СРЕДСТВ ДЛЯ ОБЕСПЕЧЕНИЯ УСЛОВИЙ ВОСПРОИЗВОДИМОСТИ ИХ НАДЕЖНОСТИ | 1995 |
|
RU2090855C1 |
| СПОСОБ КОНТРОЛЯ ПОКАЗАТЕЛЕЙ ТОПЛИВНОЙ ЭКОНОМИЧНОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТОВЫХ ДОРОГАХ | 2013 |
|
RU2548981C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ ДОРОЖНЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2753737C1 |
| СПОСОБ ДОРОЖНЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ АВТОМОБИЛЕЙ МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ И ЗАЩИЩЕННЫХ АВТОМОБИЛЕЙ В ЭКСТРЕМАЛЬНЫХ ДОРОЖНЫХ УСЛОВИЯХ | 2023 |
|
RU2822469C1 |
| Способ определения средней скорости движения транспортного средства | 2017 |
|
RU2662592C1 |
| СПОСОБ КОНТРОЛЯ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2129711C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ КАТЕГОРИЙ УСЛОВИЙ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2585116C1 |
Изобретение относится к испытаниям транспортных средств. В способе автоматического контроля уровня нагружения испытываемого транспортного средства в пределах нормативных значений для оценки его надежности перемещают транспортное средство по опорной поверхности и определяют накопленную величину уровня нагружения. При перемещении транспортного средства определяют с дискретностью 0,1 с коэффициент суммарного сопротивления движению. Среднее значение указанного коэффициента формируется в течение 10 с и передается через блок принятия решения по одному из каналов связи в одну из секций блока формирования уровня нагружения. Расширяются функциональные возможности способа. 2 н.п. ф-лы, 1 ил.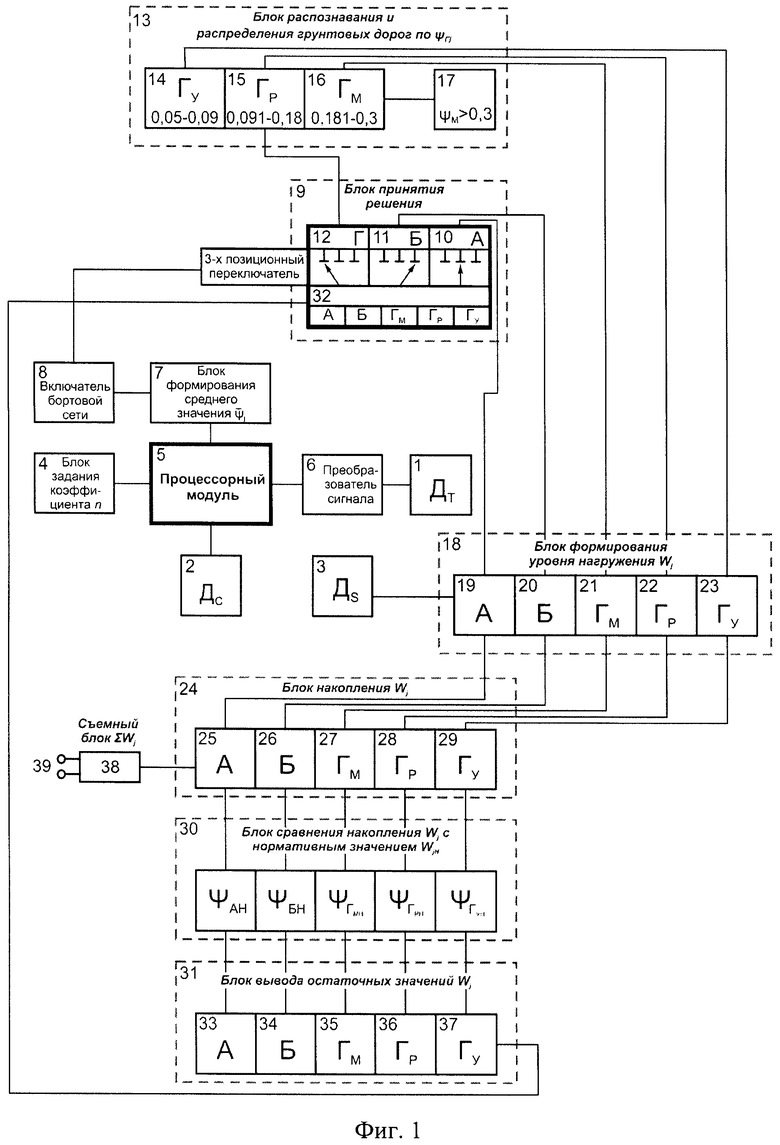
1. Способ автоматического контроля уровня нагружения испытываемого транспортного средства в пределах нормативных значений для оценки его надежности, заключающийся в перемещении испытываемого транспортного средства по j-й опорной поверхности и определении накопленной величины уровня нагружения, отличающийся тем, что при перемещении транспортного средства по j-й опорной поверхности определяют инструментально расход топлива, скорость движения и на основе предварительного расчета коэффициента пропорциональности n повышенной точности, характерного для каждого типа транспортного средства, и его использования в процессорном модуле определяют с дискретностью 0,1 с коэффициент суммарного сопротивления движению, среднее значение которого  формируется в течение Δt=10 с, передают через блок принятия решения по одному из включенных оператором каналов связи - А, Б или Г в одну из секций блока формирования уровня нагружения Wj, вычисляемого путем перемножения среднего значения коэффициента
формируется в течение Δt=10 с, передают через блок принятия решения по одному из включенных оператором каналов связи - А, Б или Г в одну из секций блока формирования уровня нагружения Wj, вычисляемого путем перемножения среднего значения коэффициента  и выполненного пробега Sj за указанный отрезок времени, а полученное таким образом порциальное значение ΔWj суммируют с предшествующим накоплением показателя Wj, сравнивают с нормативом WjH, а разницу в виде остаточного значения Wj выводят на монитор оператора для принятия решения, кроме того, при включении оператором канала связи Г сигнал с процессорного модуля со средним значением
и выполненного пробега Sj за указанный отрезок времени, а полученное таким образом порциальное значение ΔWj суммируют с предшествующим накоплением показателя Wj, сравнивают с нормативом WjH, а разницу в виде остаточного значения Wj выводят на монитор оператора для принятия решения, кроме того, при включении оператором канала связи Г сигнал с процессорного модуля со средним значением  первоначально направляют в блок распознавания вида грунтовой дороги и, в зависимости от значений ψГj, соответствующих грунтовым дорогам: удовлетворительного состояния ψГУ в диапазоне 0,05-0,09, разбитой ψГР - 0,091-0,18 или размокшей ψГМ - 0,181-0,3, распределяют по каналам связи ГУ, ГР и ГМ в аналогичные секции блока формирования уровня нагружения, а при превышении значения ψГМ>0,3 включают аварийный сигнализатор.
первоначально направляют в блок распознавания вида грунтовой дороги и, в зависимости от значений ψГj, соответствующих грунтовым дорогам: удовлетворительного состояния ψГУ в диапазоне 0,05-0,09, разбитой ψГР - 0,091-0,18 или размокшей ψГМ - 0,181-0,3, распределяют по каналам связи ГУ, ГР и ГМ в аналогичные секции блока формирования уровня нагружения, а при превышении значения ψГМ>0,3 включают аварийный сигнализатор.
2. Устройство автоматического контроля уровня нагружения испытываемого транспортного средства для оценки его надежности, содержащее включатель бортовой сети, датчики расхода топлива и скорости движения, отличающееся тем, что в него введены процессорный модуль, к входам которого подключены датчик скорости в км/ч, датчик расхода топлива через преобразователь сигнала в л/100 км и блок формирования количественного значения коэффициента пропорциональности n, процессорный модуль формирования коэффициента ψj с дискретностью 0,1 с, блок формирования среднего значения  в течение Δt=10 с, блок принятия решения с каналами связи А, Б и Г в виде 3-х позиционного переключателя с ручным управлением, блок автоматического распознавания видов грунтовых дорог по диапазону количественных значений ψГj каждого из них и распределение по соответствующим каналам связи, блок формирования уровня нагружения, входы которого подключены к блоку принятия решения по каналам связи А и Б и к блоку распознавания и распределения грунтовых дорог по каналам связи А, Б, ГУ, ГР и ГМ, блок сравнения накопленной величины уровня нагружения с нормативными значениями по всем видам дорог и блок вывода остаточных значений показателя Wj по видам дорог на монитор, соединенных между собой по указанным пяти каналам связи.
в течение Δt=10 с, блок принятия решения с каналами связи А, Б и Г в виде 3-х позиционного переключателя с ручным управлением, блок автоматического распознавания видов грунтовых дорог по диапазону количественных значений ψГj каждого из них и распределение по соответствующим каналам связи, блок формирования уровня нагружения, входы которого подключены к блоку принятия решения по каналам связи А и Б и к блоку распознавания и распределения грунтовых дорог по каналам связи А, Б, ГУ, ГР и ГМ, блок сравнения накопленной величины уровня нагружения с нормативными значениями по всем видам дорог и блок вывода остаточных значений показателя Wj по видам дорог на монитор, соединенных между собой по указанным пяти каналам связи.
| СПОСОБ НОРМИРОВАНИЯ, КОНТРОЛЯ И КОРРЕКТИРОВКИ УРОВНЯ НАГРУЖЕНИЯ ИСПЫТЫВАЕМЫХ ТРАНСПОРТНЫХ СРЕДСТВ ДЛЯ ОБЕСПЕЧЕНИЯ УСЛОВИЙ ВОСПРОИЗВОДИМОСТИ ИХ НАДЕЖНОСТИ | 1995 |
|
RU2090855C1 |
| RU 2063887 C1, 20.07.1996 | |||
| СПОСОБ КОНТРОЛЯ ПОКАЗАТЕЛЕЙ ТОПЛИВНОЙ ЭКОНОМИЧНОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТОВЫХ ДОРОГАХ | 2013 |
|
RU2548981C1 |
| СПОСОБ СТЕНДОВЫХ ИСПЫТАНИЙ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОЛГОВЕЧНОСТЬ | 2001 |
|
RU2181484C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СУММАРНОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ ДЛЯ КАТЕГОРИРОВАНИЯ ИСПЫТАТЕЛЬНЫХ ДОРОГ | 2014 |
|
RU2561647C1 |

