Изобретение относится к испытаниям транспортных средств (ТС) на надежность (безотказность, долговечность) и касается устройства для непрерывного контроля уровня нагружения транспортного средства при автоматическом переключении контролируемых параметров при переходе транспортного средства с одного вида испытательных дорог на другой.
В настоящее время условия испытаний ТС регламентируют видами дорог [1] и [2] с их оценкой через коэффициент суммарного сопротивления движению Ψj каждой j-й дороги [3] и [4], определяемый расходом топлива, затрачиваемого на преодоление суммарных сил сопротивления движению ТС и реализуемой скоростью движения, и меру их воздействия на ТС - через накопленную величину уровня нагружения по расчетной зависимости [5]:

где Wj - уровень нагружения на j-й дороге, н.км (нормативный километр);
Sj - пробег на j-й дороге, км;
Ψj - коэффициент суммарного сопротивления движению.
Указанная методическая основа оценки уровня нагружения испытываемого ТС реализована в патенте на изобретение RU №2671066 С1 G01M 17/00 «Способ автоматического контроля уровня нагружения испытываемого ТС для оценки его надежности и устройство для его реализации» [6], которое практически представляет собой не автоматическую, а автоматизированную систему с ручным управлением, не лишенную недостатка. Известное устройство не исключает технологический сбой в системе передачи контролируемых параметров при случайном неиспользовании ручного управления 3-х позиционным переключателем блока принятия решения в момент перехода ТС с одного вида испытательных дорог на другой по причине отсутствия между ними согласованных технологических связей.
Сущность изобретения заключается в согласованной передаче контролируемых параметров по каналу связи, соответствующему виду испытательной дороги, без участия водителя, путем автоматического переключения каналов связи, соответствующих видам испытательных дорог, что обеспечивает совместно с дублирующей системой - переключателя режимов контроля с индикаторами прохождения сигнала высокую надежность регистрации контролируемых параметров.
Это достигается тем, что в блок принятия решения устройства введен блок автоматического переключения видов испытательных дорог с подблоками их распознавания по средним значениям, устанавливаемым дискретно за каждые отрезки времени Δt=8 с на:
- асфальтированной дороге по показателю ΨА, равному значению менее 0,05 (ΨА<0,05);
- грунтовой дороге по показателю Ψгj, равному значению 0,05 и более  );
);
- булыжной дороге по амплитуде вертикальных ускорений подрессоренной массы  со средним значением, равным и более 3 м/с2
со средним значением, равным и более 3 м/с2  .
.
Совокупность признаков автоматического контроля и передачи контролируемых параметров в каналы связи, которые соответствуют видам испытательных дорог, без участия водителя ТС, с помощью операционных блоков автоматического переключения каналов, позволяет считать заявленный объект соответствующим критерию «новизна».
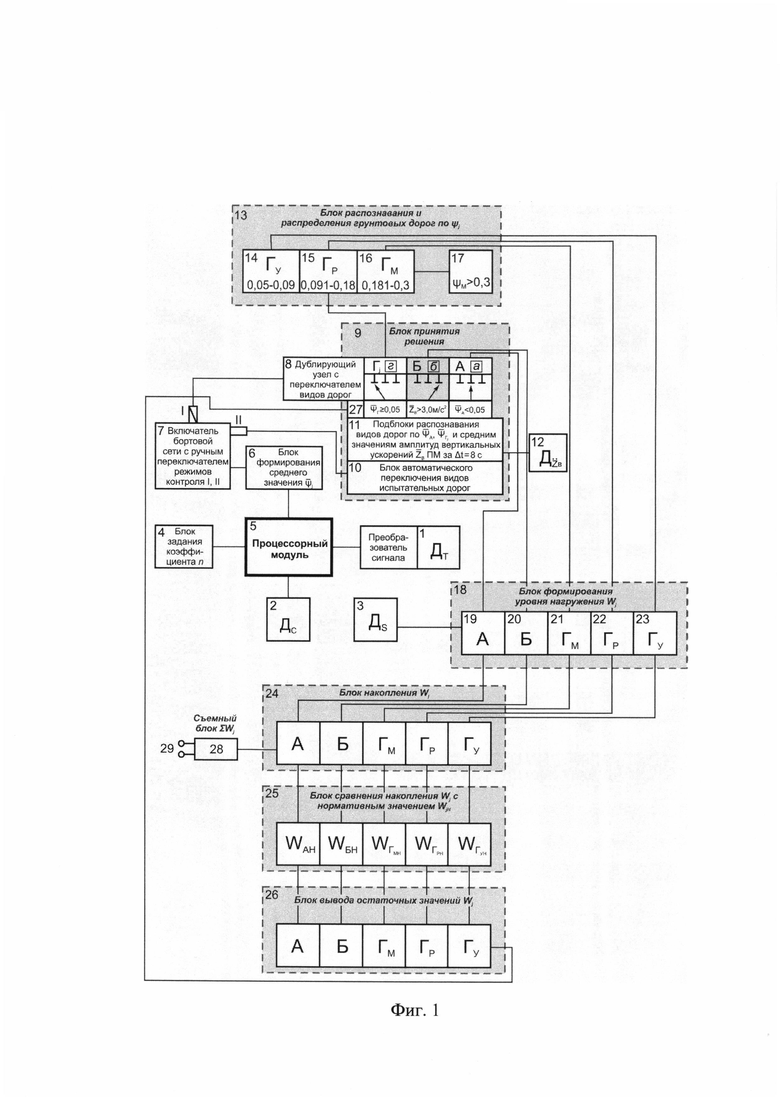
На фиг. 1 представлена общая функциональная схема устройства автоматического контроля уровня нагружения транспортного средства без участия водителя.
Устройство состоит из датчиков расхода топлива с преобразователем сигнала Дс1, скорости движения Дs2 и пройденного пути Дs3, блока задания коэффициента n4, характерного для каждого типа ТС, процессорного модуля 5 формирования суммарного сопротивления движению Ψj, к которому подключены датчик Дс и датчик Дт, блока 6 формирования среднего значения сигнала с интервалом Δt=8 с, включателя бортовой сети с ручным переключателем в положения I и II режимов контроля 7, дублирующего узла с переключателем видов дорог 8, блока принятия решения 9 с каналами связи А, Б и Гj и индикаторами прохождения сигнала а, б и г, блока 10 автоматического переключения видов испытательных дорог, подблоков 11 распознавания видов дорог А и Гj по  и Б - через вертикальные ускорения ПМ по средним значениям ΖВПМ за время Δt с датчиком ускорений 12, блока 13 распознавания и распределения грунтовых дорог Гу - 14, Гр - 15 и Гм - 16 с сигнализатором датчика 17 превышения допустимой величины Ψм>0,3, блока формирования уровня нагружения 18 по видам дорог с подблоками А - 19, Б - 20, Гм - 21, Гр - 22, Гу - 23 с использованием сигнала, поступающего с датчика Дs - 3 за время Δt и блоков: накопления Wj - 24, сравнения Wj с нормативным значением Wн - 25 и вывода остаточных значений Wj - 26 на секторы монитора 27 блока принятия решения 9 по видам дорог и съемного блока суммарного уровня нагружения WΣj - 28 с выводом на канал 29.
и Б - через вертикальные ускорения ПМ по средним значениям ΖВПМ за время Δt с датчиком ускорений 12, блока 13 распознавания и распределения грунтовых дорог Гу - 14, Гр - 15 и Гм - 16 с сигнализатором датчика 17 превышения допустимой величины Ψм>0,3, блока формирования уровня нагружения 18 по видам дорог с подблоками А - 19, Б - 20, Гм - 21, Гр - 22, Гу - 23 с использованием сигнала, поступающего с датчика Дs - 3 за время Δt и блоков: накопления Wj - 24, сравнения Wj с нормативным значением Wн - 25 и вывода остаточных значений Wj - 26 на секторы монитора 27 блока принятия решения 9 по видам дорог и съемного блока суммарного уровня нагружения WΣj - 28 с выводом на канал 29.
Устройство работает следующим образом.
При включении водителем бортовой сети с переключателем режимов контроля 7 в положении II и пуска двигателя датчики 1, 2 и 3 и процессорный модуль 5 переводятся в работоспособное состояние. Перед началом первого движения каждого образца одноразово через блок задания коэффициента n повышенной точности 4 в процессорный модуль 5 по источнику [4] вводится его числовое значение.
С началом движения по А-дороге или любой другой подъездной дороге до испытательного участка в процессорном модуле 5 формируется текущее значение показателя Ψj, среднее значение которого за время Δt формируется в блоке 6 и передается через включатель бортовой сети с переключателем режимов контроля, находящийся в положении II, в блок автоматического переключения видов испытательных дорог 10 с предварительным анализом количественного значения в подблоке 11. При значении Ψj<0,05 сигнал через канал связи, при закрытых каналах связи Б и Гj, из блока принятия решения 9 передается в подблок 19 блока формирования уровня нагружения 18, где при поступлении информации с датчика Дs - 3 по зависимости (1) формируется значение показателя WA, которое далее передается по тракту А последовательно в блоки 24, 25 и 26 с выводом значения WA на монитор 27.
При переходе испытываемого образца на грунтовую испытательную трассу со значением Ψг, равным и более 0,05, сигнал из блока 6 поступает в блок автоматического переключения видов испытательных дорог 10 также с предварительным анализом в подблоке 11. При значении Ψj≥0,05 открывается канал связи Гj с одновременным закрытием канала связи А, сигнал из блока 10 поступает в блок распознавания и распределения грунтовых дорог 13 по значению ΨГj в диапазоне 0,05-0,3, в котором, в зависимости от среднего значения ΨГj, сформированном за время Δt=8 с, выполняется распределение в подблоки 14, 15 и 16 со значением показателя ΨГj в диапазоне соответственно ΨГу - 0,05 - 0,09, ΨГр - 0,091 - 0,18, ΨM - 0,181 - 0,3 с последующей его передачей в блок формирования уровня нагружения 18 в один из подблоков 21, 22, 23 и далее в блок накопления уровня нагружения 24 по соответствующим каналам связи ГМ, ГР и ГУ, блок сравнения 25 и блок вывода остаточных значений ΨГj 26 с выводом значений на монитор 27.
Дифференцированная регистрация параметров по ΨГj и WГj грунтовых дорог позволяет проводить испытания не только по отдельно взятому их виду, но и на общей грунтовой дороге со смешанным их расположением, что чаще всего имеет место на испытательных полигонах, существенно повышая точность оценки надежности ТС при автоматическом переключении видов испытательных дорог.
При переходе образца на дорогу с булыжным покрытием (Б-дорогу) канал связи Б подблока 11 автоматически включается в работу при достижении минимально допустимых вертикальных ускорений подрессоренной массы по средним значениям, равным 3 м/с2 и более, установленным на основе статистических обобщений испытаний автомобилей многоцелевого назначения на плавность хода [7] и их нормативам [8] в количестве более 120 образцов. При включении канала связи Б в подблоке 11 каналы связи А и Гj автоматически закрываются, независимо от того, что переход ТС выполнен с дороги А или дорог Гj, при продолжении работы процессорного модуля и передаче среднего значения показателя ΨБ в блок 10 и последующей его передаче в блок по формированию уровня нагружения 18 в подблок 20 и далее по описанной технологии в блоки 24, 25 и 26 с выводом сигнала на монитор 27.
При штатной работе системы передача сигнала по Ψj из блока 10 параллельно сопровождается работой индикаторов сигнала а, б и г, а в случае их отказа оператор (водитель ТС) переводит переключатель блока 7 в положение I, соединяя его с дублирующим узлов 8 и последующим переключением видов дорог ручным способом до выяснения причин сбоя автоматической системы 10 и ее подблоков 11 или индикаторов сигнала а, б или г.
Дублирующая система включается также принудительно в связи с завершением испытаний образца или приближением остаточных значений показателя Wj к нулю хотя бы по одному из пяти видов дорог при реализации нормативов Wjн, значения по которым определены по зависимости 1 и заложены в блоке 25 на уровне, н.км:
WАн=276, WБн=621, WГун=684, WГрн=456 и WМн=828 при суммарном их значении 2865.
Использование автоматического контроля уровня нагружения испытываемого транспортного средства, в отличие от аналога, представляющего автоматизированную систему с ручным управлением контроля передачи сигнала по параметрам Ψj и Wj при переходе ТС с одного вида дороги на другой, обеспечивает исключение человеческого фактора, в том числе преднамеренного, когда пробеги ТС проводят по более «легкой» дороге с зачетом по «тяжелой», повышенную точность и оперативную возможность оценить выполненные пробеги по видам дорог, а при наличии единственной грунтовой дороги на испытательном полигоне - обеспечить дифференцированную регистрацию контролируемых параметров по трем видам грунтовых дорог (Гу, Гр и Гм), которые могут быть выделены отдельными участками протяженностью от 100 м и более (с учетом дискретности расчета средних значений параметров за время Δt=8 с), обеспечивая высокую оценку качества условий испытаний и показателей надежности.
ИСТОЧНИКИ ИНФОРМАЦИИ
1 ОСТ 37.001.472-88. Приемочные испытания автотранспортных средств. Типовая программа испытания. - Введ. 1989-01-01. - М.: НАМИ, 1989.
2 ОСТ 37.001.520-96. Категории испытательных дорог. Параметры и методы их определения. - Введ. 1997-07-01. - М.: «Дорожный транспорт», ТК56, 1996 г.
3 RU патент на изобретение №2011955 С1 G01М 17/00 от 30.04.1994.
4 RU патент на изобретение №2561647 C1 G01M 17/007 от 04.08.2015.
5 RU патент на изобретение №2090855 C1 G01M 17/00 от 20.09.1997.
6 RU патент на изобретение №2671066 C1 G01M 17/00 от 29.10.2018.
7 ОСТ 37.001.275-84. Автотранспортные средства. Методы испытаний на плавность хода. - Введ. 1985-07-01 (изм. №2, ИУОС №4, 1991). - М.: НАМИ, 1985.
8 ОСТ 37.001.291-84. Автотранспортные средства. Технические нормы плавности хода. - Введ. 1985-07-01. - М.: НАМИ, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического контроля уровня нагружения испытываемого транспортного средства для оценки его надежности и устройство для его осуществления | 2017 |
|
RU2671066C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ ДОРОЖНЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2753737C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ОСТАТОЧНОГО РЕСУРСА ТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ЕГО ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2761126C1 |
| СПОСОБ СТЕНДОВЫХ ИСПЫТАНИЙ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОЛГОВЕЧНОСТЬ | 2001 |
|
RU2181484C1 |
| СПОСОБ КОНТРОЛЯ ПОКАЗАТЕЛЕЙ ТОПЛИВНОЙ ЭКОНОМИЧНОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТОВЫХ ДОРОГАХ | 2013 |
|
RU2548981C1 |
| СПОСОБ ДОРОЖНЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ АВТОМОБИЛЕЙ МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ И ЗАЩИЩЕННЫХ АВТОМОБИЛЕЙ В ЭКСТРЕМАЛЬНЫХ ДОРОЖНЫХ УСЛОВИЯХ | 2023 |
|
RU2822469C1 |
| Способ определения средней скорости движения транспортного средства | 2017 |
|
RU2662592C1 |
| СПОСОБ ДОРОЖНЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582319C2 |
| Способ определения мощности двигателя транспортного средства при заданных полной массе, средней скорости движения и показателе категории испытательной дороги | 2017 |
|
RU2677738C1 |
| СПОСОБ ДОРОЖНЫХ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ ТРАНСПОРТНЫХ СРЕДСТВ В РЕЖИМЕ КОМБИНИРОВАННОГО ТОРМОЖЕНИЯ | 2022 |
|
RU2791157C1 |
Изобретение относится к испытаниям транспортных средств. Бортовой контроллер регистрации уровня нагружения испытываемого транспортного средства при его перемещении по различным типам опорной поверхности испытательных дорог, содержит процессорный модуль с датчиками расхода топлива и преобразователем сигнала и скорости движения, блок формирования средних значений коэффициента суммарного сопротивления движению, блок принятия решения с 3-х позиционным ручным переключателем, блок распознавания и распределения грунтовых дорог, блок формирования уровня нагружения с датчиком пути. Дополнительно введены блок автоматического переключения каналов контролируемых параметров по видам испытательных дорог совместно с индикаторами прохождения сигнала, дублирующий узел, подблоки, входящие в блок принятия решений по распознаванию испытательных дорог по средним значениям коэффициента суммарного сопротивления движению и средним значением амплитуд вертикальных ускорений подрессоренной массы с датчиком вертикальных ускорений. Повышается надежность регистрации контролируемых параметров. 1 ил.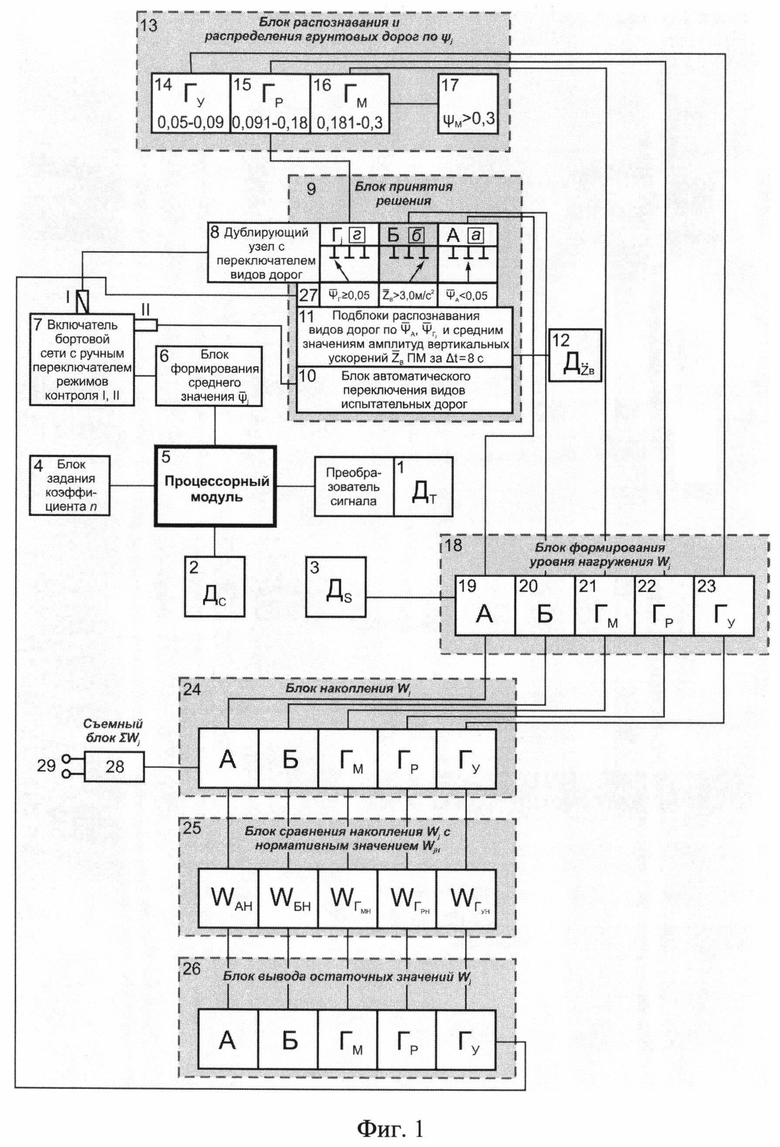
Бортовой контроллер регистрации уровня нагружения испытываемого транспортного средства в пределах нормативных значений для оценки его надежности при перемещении испытываемого транспортного средства по опорной поверхности испытательных дорог типа А - асфальтобетонных, Б - булыжных, Гj - грунтовых: Гу - удовлетворительного состояния, Гр - разбитых, Гм - размокших и определении накопленной величины показателя уровня нагружения Wj, содержащий процессорный модуль с датчиками расхода топлива и преобразователем сигнала и скорости движения, блок формирования средних значений коэффициента суммарного сопротивления движению  блок принятия решения с 3-х позиционным ручным переключателем, блок распознавания и распределения грунтовых дорог по
блок принятия решения с 3-х позиционным ручным переключателем, блок распознавания и распределения грунтовых дорог по  блок формирования уровня нагружения с датчиком пути в км., отличающийся тем, что в него введены блок автоматического переключения каналов контролируемых параметров по видам испытательных дорог А, Б и Гj совместно с индикаторами прохождения сигнала а, б и г, входы которого подключены к включателю бортовой сети с ручным переключателем режимов контроля, дублирующий узел, подблоки, входящие в блок принятия решений по распознаванию испытательных дорог А, Б и Г по средним значениям:
блок формирования уровня нагружения с датчиком пути в км., отличающийся тем, что в него введены блок автоматического переключения каналов контролируемых параметров по видам испытательных дорог А, Б и Гj совместно с индикаторами прохождения сигнала а, б и г, входы которого подключены к включателю бортовой сети с ручным переключателем режимов контроля, дублирующий узел, подблоки, входящие в блок принятия решений по распознаванию испытательных дорог А, Б и Г по средним значениям:  и
и  и средним значением амплитуд вертикальных ускорений подрессоренной массы
и средним значением амплитуд вертикальных ускорений подрессоренной массы  со значением ≥3 м/с2 с датчиком вертикальных ускорений, выходы которых подключены к блоку формирования уровня нагружения, в том числе один из них - через блок распознавания трех видов грунтовых дорог Гу, Гр и Гм, и дальнейшей регистрации сигнала по Wj, последовательно, в блоках накопления, сравнения с нормативным значением Wн и вывода остаточных значений показателя Wj по видам дорог на монитор, соединенных между собой по каналам связи А, Б, Гу, Гр и Гм.
со значением ≥3 м/с2 с датчиком вертикальных ускорений, выходы которых подключены к блоку формирования уровня нагружения, в том числе один из них - через блок распознавания трех видов грунтовых дорог Гу, Гр и Гм, и дальнейшей регистрации сигнала по Wj, последовательно, в блоках накопления, сравнения с нормативным значением Wн и вывода остаточных значений показателя Wj по видам дорог на монитор, соединенных между собой по каналам связи А, Б, Гу, Гр и Гм.
| Способ автоматического контроля уровня нагружения испытываемого транспортного средства для оценки его надежности и устройство для его осуществления | 2017 |
|
RU2671066C1 |
| СПОСОБ НОРМИРОВАНИЯ, КОНТРОЛЯ И КОРРЕКТИРОВКИ УРОВНЯ НАГРУЖЕНИЯ ИСПЫТЫВАЕМЫХ ТРАНСПОРТНЫХ СРЕДСТВ ДЛЯ ОБЕСПЕЧЕНИЯ УСЛОВИЙ ВОСПРОИЗВОДИМОСТИ ИХ НАДЕЖНОСТИ | 1995 |
|
RU2090855C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СУММАРНОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ ДЛЯ КАТЕГОРИРОВАНИЯ ИСПЫТАТЕЛЬНЫХ ДОРОГ | 2014 |
|
RU2561647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СУММАРНОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ЕГО ДОРОЖНЫХ ИСПЫТАНИЯХ | 1990 |
|
RU2011955C1 |

