Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты, в том числе, от импульсных и ответных помех.
Большие проблемы работе РЛС создают преднамеренные активные, в том числе, импульсные помехи [Справочник. Радиотехнические системы. Основы построения и теория. Под редакцией Я.Д. Ширмана гл. 6.4.1, с. 79], воздействующие на РЛС по главному лучу и боковым лепесткам диаграммы направленности антенны (ДНА) [Защита от радиопомех, под ред. М.В. Максимова, М. Сов. Радио, 1976 г, с. 60]. Импульсные помехи энергетически более выгодны для постановщика, так как при небольшой средней мощности импульсная мощность помехи может быть очень большой. В результате действия импульсных помех происходят ложные обнаружения целей. При достаточно большой мощности помехи она обнаруживается не только в главном луче, но и при приеме с бокового направления боковыми лепестками ДНА, в результате чего при частоте следования импульсов значительно превышающей частоту зондирования создается большое число ложных сигналов (отметок) хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью, в случае синхронной ответной помехи. Во всех случаях импульсы помехи воспринимаются как отраженные от целей, поэтому по ним выполняют захват и завязку трассы [С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации стр. 109] с последующим ее сбросом, в случае несинхронной помехи, или ведением ложной трассы, в случае синхронной помехи с изменяющейся задержкой. В результате ответная помеха приводит к перегрузке устройств обработки сигнала и сопровождения трасс целей.
Известен способ подавления ответной импульсной помехи (ОИП), принятой с бокового направления боковыми лепестками диаграммы направленности (ДН) основной антенны РЛС, который осуществляется с помощью системы подавления боковых лепестков, содержащей основной и дополнительный приемные каналы с диаграммой направленности дополнительной антенны, перекрывающей боковые лепестки ДН основной антенны и схему вычитания по видеочастоте. Коэффициенты усиления антенны и приемника дополнительного канала выбираются таким образом, чтобы для помех, принятых боковыми лепестками ДН антенны основного приемного канала, выполнялось условие Uп1>Uп0,
где Uп1 и Uп0 - амплитуды импульсов помехи на выходе дополнительного и основного приемных каналов. На выход схемы вычитания проходят сигналы только в случае Uп1>Uп0 и фактически блокируют прохождение сигналов через основной канал. Поэтому импульсные помехи, принятые боковыми лепестками ДН основной антенны, будут подавлены [Основы построения радиотехнических войск, гл. 5.7.1 Амплитудная пространственная селекция импульсных помех. Учебник, под общей редакцией к.т.н. В.Н. Тяпкина. Красноярск, СФУ 2011 г].
Недостаток известного способа подавления импульсных помех состоит в том, что при превышении сигнала в дополнительном канале над сигналом основного канала схема вычитания фактически блокирует прохождение любых сигналов, в том числе и принимаемых с осматриваемого направления отраженных от целей и совпадающих по времени с импульсами помехи, поскольку при вычитании по видеочастоте не учитываются фазовые различия, что эквивалентно запрету, а это приводит к снижению вероятности обнаружения цели.
Известен наиболее близкий к предлагаемому способ компенсации непрерывных помех, принятых по боковым лепесткам [Справочник. Радиотехнические системы. Основы построения и теория. Под редакцией Я.Д. Ширмана, гл. 25.4.2, с. 436] основанный на приеме излучения источника помехи двумя приемными каналами - основным и дополнительным, вычислении корреляции между сигналами в этих каналах и последующей компенсацией активной помехи с помощью автокомпенсатора.
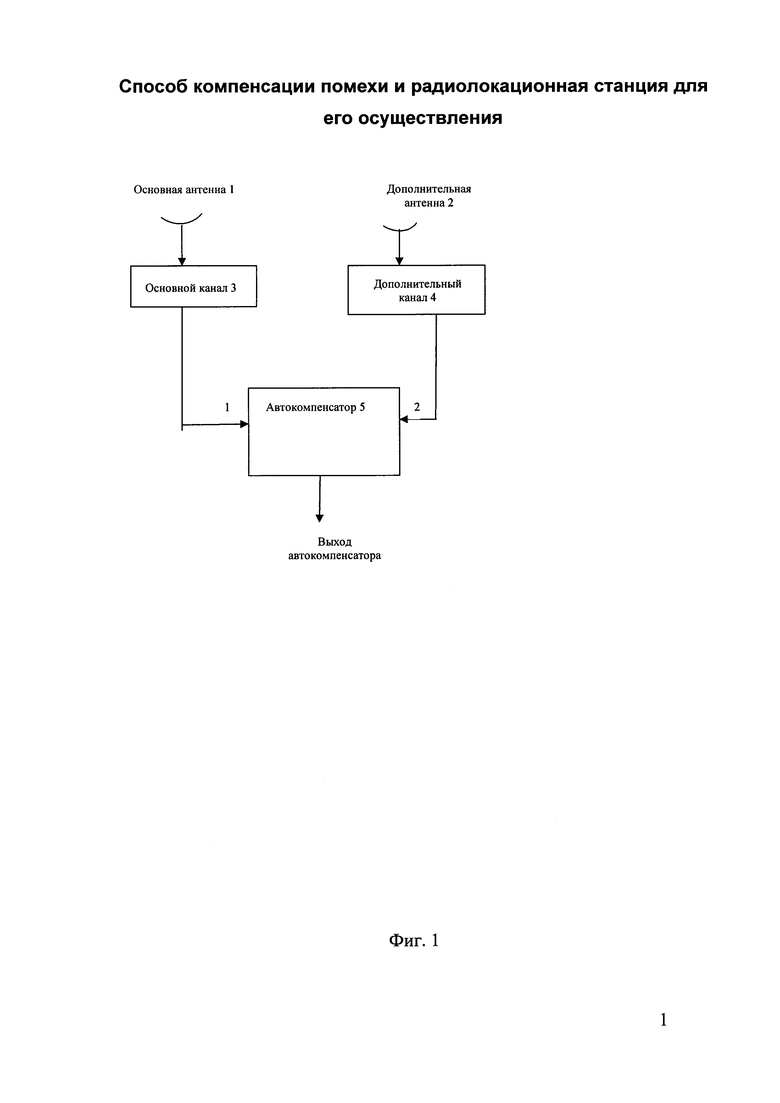
Известна наиболее близкая к предлагаемой РЛС (там же гл. 25.4.3 с. 436) (Фиг. 1), содержащая две антенны, основную 1 и дополнительную 2, два приемных канала - основной (ОК) 3, дополнительный (ДК) 4 и автокомпенсатор 5, выход основной антенны 1 соединен с входом ОК 3, выход дополнительной антенны 2 соединен с входом ДК 4, выходы ДК 4 и ОК 3 соединены с соответствующими входами автокомпенсатора 5.
Способ и РЛС работают следующим образом. Непрерывная помеха, принятая основной 1 и дополнительной 2 антеннами, поступает через основной 3 и дополнительный 4 каналы на соответствующие входы автокомпенсатора 5. В автокомпенсаторе корреляционным способом определяют соотношение уровней помехи, их выравнивание и противофазное сложение. При этом на выходе автокомпенсатора 5 происходит компенсация помехи.
Постоянная времени срабатывания автокомпенсатора выбирается много большей, чем длительность зондирующего импульса, для того, чтобы не происходило подавления сигнала от цели. Поэтому автокомпенсаторы не применяют для автокомпенсации импульсных помех.
Таким образом решаемой технической проблемой (техническим результатом) является компенсация импульсной помехи, принятой боковыми лепестками ДНА и исключении компенсации отраженного сигнала, принятого главным лучом.
Технический результат (решение проблемы) достигается тем, что в способе компенсации помехи, принятой с бокового направления боковыми лепестками диаграммы направленности антенны, основанном на приеме излучения источника помехи двумя приемными каналами - основным и дополнительным, вычислении корреляции между сигналами в этих каналах и последующей компенсацией помехи с помощью автокомпенсатора, согласно изобретению при превышении уровня импульсной помехи в дополнительном приемном канале уровня импульсной помехи в основном приемном канале формируют строб, на время действия которого включают автокомпенсатор.
Технический результат (решение проблемы) достигается тем, что в радиолокационную станцию для осуществления способа компенсации помехи, содержащую основную и дополнительную антенны, основной и дополнительный приемные каналы и автокомпенсатор, выходы антенн соединены со входами соответствующих приемных каналов, выходы приемных каналов соединены с первым и вторым входами автокомпенсатора соответственно, согласно изобретению включены схема сравнения уровней сигналов основного и дополнительного приемных каналов, устройство стробирования автокомпенсатора, выходы приемных каналов соединены с первым и вторым входами схемы сравнения уровней сигналов основного и дополнительного приемных каналов соответственно, выход схемы сравнения соединен с входом устройства стробирования, выход которого соединен с третьим входом автокомпенсатора.
Суть работы способа и РЛС заключается в следующем (фиг. 2).
Импульсная помеха принимается основной антенной с бокового направления за счет боковых лепестков ДН и дополнительной антенной, диаграмма которой перекрывает боковые лепестки основной антенны. Принятые сигналы поступают соответственно в основной и в дополнительный каналы, и далее на соответствующие входы схемы сравнения и автокомпенсатора. С выхода схемы сравнения сигнал, в случае превышения импульса помехи в дополнительном канале, поступает на устройство стробирования, строб которого включает автокомпенсатор. При этом автокомпенсатор работает только во время действия строба. В интервалах между стробами автокомпенсатор закрыт и шумы дополнительного канала не ухудшают коэффициент шума РЛС. Кроме того, в автокомпенсаторе предусмотрено запоминание его состояния на время между стробами. Строб поступает на схему запоминания, которая запоминает параметры автокомпенсатора от конца строба до начала следующего строба. Таким образом происходит последовательное, от строба к стробу, повышение коэффициента подавления импульсов помехи до максимально возможного значения. Чем выше частота повторения импульсов помехи по сравнению с периодом зондирования, тем быстрее автокомпенсатор может выходить на режим максимальной компенсации. При этом, если импульсы помехи, принятой с бокового направления, накладываются на отраженный сигнал от цели, принятый с осматриваемого направления, то помеха будет скомпенсирована, а сигнал от цели сохранится благодаря фазовым различиям.
Изобретение иллюстрируется чертежами:
фиг. 1 - схема РЛС для осуществления способа - прототипа;
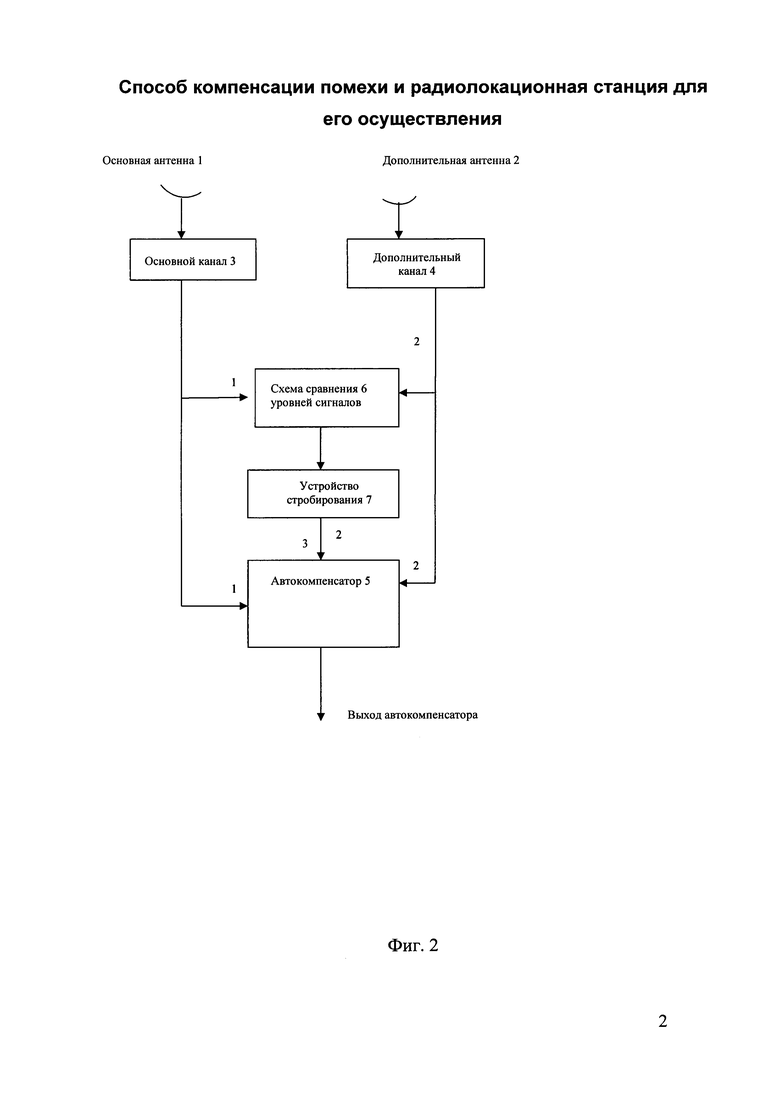
фиг. 2 -схема РЛС для осуществления заявленного способа.
Заявленная РЛС, для осуществления заявленного способа компенсации помехи (Фиг. 2) содержит основную антенну 1, дополнительную антенну 2, основной канал 3 и дополнительный канал 4, автокомпенсатор 5, схему сравнения уровней сигналов 6, устройство стробирования 7, выходы антенн 1 и 2 подключены соответственно к входам каналов ОК 3 и ДК 4, выход ОК 3 соединен с первыми входами схемы сравнения 6 и автокомпенсатора 5, выход ДК 4 соединен с о вторыми входами схемы сравнения 6 и автокомпенсатора 5, выход схемы сравнения 6 соединен с входом устройства стробирования 7, выход которого соединен с третьим входом автокомпенсатора 5, выход которого является выходом РЛС.
Рассмотрим более подробно осуществимость способа (Фиг. 2) на конкретном примере. Сигналы, принятые основной 1 и дополнительной 2 антеннами, поступают соответственно на входы ОК 3 и ДК 4, с выходов которых поступают соответственно на входы 1 и 2 схемы сравнения 6 и автокомпенсатора 5. В схеме 6 происходит сравнение уровней сигналов в ОК 3 и в ДК 4. Если сигнал в ДК 4 превышает уровень сигнала в ОК 3, то на выходе схемы сравнения 6 формируется сигнал, поступающий на устройство стробирования 7, где формируется строб, равный по длительности импульсу помехи, уровень которой превысил уровень сигнала в ОК 3. Сформированный строб с выхода устройства стробирования 7 поступает на третий вход автокомпенсатора 5 и включает его на время действия строба. Кроме того, в автокомпенсаторе предусмотрено запоминание его состояния на время между стробами. Строб поступает на схему запоминания, которая запоминает параметры (управляющее напряжение) автокомпенсатора от конца строба до начала следующего строба, а автокомпенсатор 5 в этот момент выключают до появления следующего строба.
Управляющее напряжение в автокомпенсаторе формируется в процессе вычисления взаимной корреляции между не скомпенсированными остатками помехи на выходе автокомпенсатора 5 и сигналом в ДК 4. За время действия строба может не происходить полной компенсации импульса помехи, поэтому запомненное управляющее напряжение используется как ступень для продолжения компенсации в следующем стробе.
Причинно-следственная связь между решаемой проблемой «… компенсация импульсной помехи, принятой по боковым направлениям и исключении компенсации отраженного сигнала, принятого главным лучом …» и признаками способа «… при превышении уровня сигнала в дополнительном приемном канале над уровнем сигнала в основном приемном канале формируют строб на время которого включают автокомпенсатор» состоит в том, что автокомпенсатор включают на время действия импульса помехи, принятой только с бокового направления боковыми лепестками ДН.
Таким образом достигается заявленный технический результат (решается поставленная проблема).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704007C1 |
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704001C1 |
| Способ компенсации помех (варианты) и радиолокационная станция для его осуществления | 2018 |
|
RU2695993C1 |
| Способ компенсации помех и комплекс для его осуществления | 2018 |
|
RU2703999C1 |
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704015C1 |
| СПОСОБ ПОДАВЛЕНИЯ АКТИВНОЙ ПОМЕХИ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2549375C1 |
| ПОМЕХОЗАЩИЩЕННОЕ ПРИЕМНОЕ УСТРОЙСТВО РЛС | 1989 |
|
SU1841067A1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840239A1 |
| КОРРЕЛЯЦИОННЫЙ АВТОКОМПЕНСАТОР ПОМЕХ | 1984 |
|
SU1841059A1 |
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты, в том числе, от импульсных и ответных помех. Достигаемый технический результат - компенсация импульсной помехи, принятой с боковых направлений боковыми лепестками диаграммы направленности антенны, и исключение компенсации отраженного сигнала, принятого главным лучом. Технический результат достигается тем, что в способе компенсации помехи, принятой с бокового направления боковыми лепестками диаграммы направленности антенны, основанном на приеме излучения источника помехи двумя приемными каналами - основным и дополнительным, вычислении корреляции между сигналами помехи в этих каналах и последующей компенсацией помехи с помощью автокомпенсатора, при превышении уровня импульсной помехи в дополнительном приемном канале уровня импульсной помехи в основном приемном канале формируют строб, на время действия которого включают автокомпенсатор. Технический результат достигается тем, что радиолокационная станция для осуществления заявленного способа компенсации помехи содержит основную и дополнительную антенны, основной и дополнительный приемные каналы, автокомпенсатор, схему сравнения сигналов основного и дополнительного приемных каналов, устройство стробирования автокомпенсатора, определенным образом соединенные между собой. 2 н.п. ф-лы, 2 ил.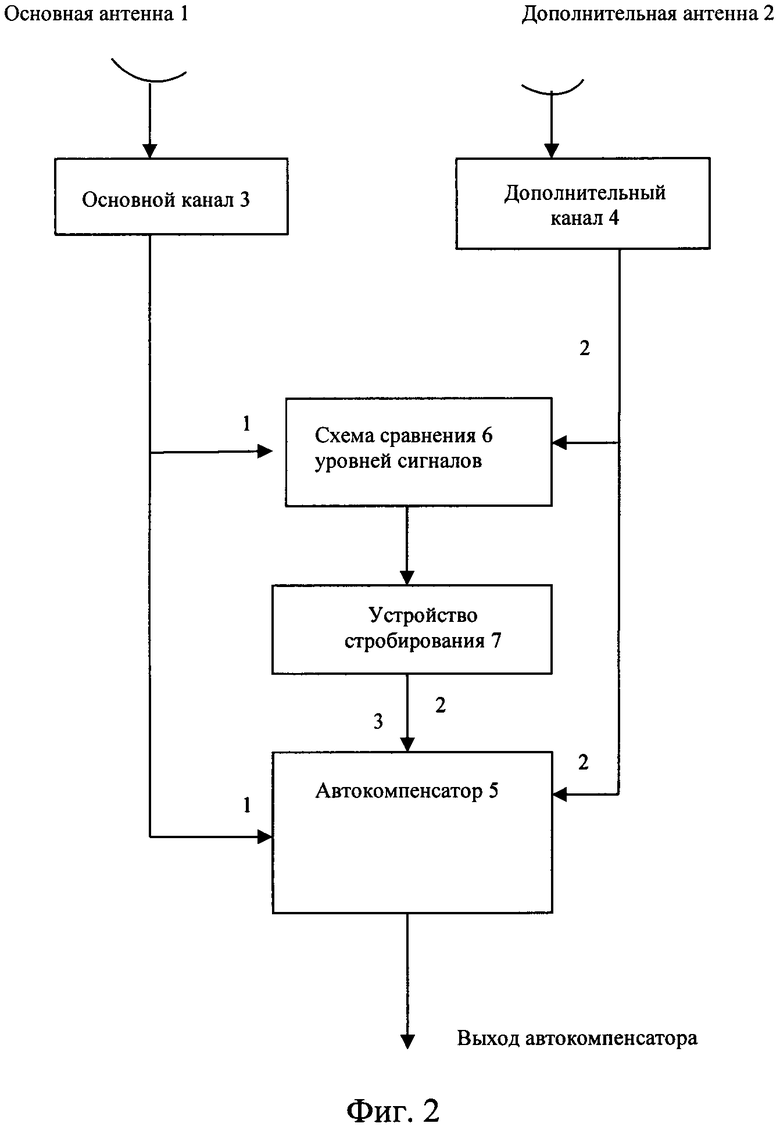
1. Способ компенсации помехи, принятой боковыми лепестками диаграммы направленности антенны, основанный на приеме излучения источника помехи двумя приемными каналами - основным и дополнительным, вычислении корреляции между сигналами помехи в этих каналах и последующей компенсацией помехи с помощью автокомпенсатора, отличающийся тем, что при превышении уровня импульсной помехи в дополнительном приемном канале уровня импульсной помехи в основном приемном канале формируют строб, на время действия которого включают автокомпенсатор.
2. Радиолокационная станция для осуществления способа компенсации помехи, содержащая основную и дополнительную антенны, основной и дополнительный каналы приема и автокомпенсатор, выходы антенн соединены со входами соответствующих приемных каналов, выходы приемных каналов соединены с первым и вторым входами автокомпенсатора, отличающаяся тем, что в нее включены схема сравнения уровней сигналов основного и дополнительного приемных каналов, устройство стробирования автокомпенсатора, выходы приемных каналов соединены с первым и вторым входами схемы сравнения уровней сигналов основного и дополнительного приемных каналов соответственно, выход схемы сравнения соединен с входом устройства стробирования, выход которого соединен с третьим входом автокомпенсатора.
| Радиотехнические системы | |||
| Основы построения и теория | |||
| Справочник | |||
| Под ред | |||
| ШИРМАНА Я.Д | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ НА ФОНЕ СИЛЬНЫХ ИМПУЛЬСНЫХ ПОМЕХ В ПРИЕМНОМ КАНАЛЕ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2007 |
|
RU2334247C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| US 6633251 B1, 14.10.2003 | |||
| WO 2005066649 A2, 21.07.2005 | |||
| JP 2003329765 A, 19.11.2003 | |||
| US 8587470 B2, 19.11.2013. | |||

