Изобретение относится к области радиолокации и, в частности, к способам радиолокации целей на фоне отражений от земной поверхности, реализуемых в радиолокационных системах управления воздушным движением (УВД), а также стационарных и мобильных импульсно-доплеровских информационно-измерительных системах различного назначения.
Известны способы импульсно-доплеровской радиолокации целей на фоне отражений от земной поверхности, широко применяемые в РЛС с совмещенным приемопередающим антенным устройством и квазинепрерывным излучением (КНИ) высокой частоты повторения (ВЧП) импульсов [1-5], в которых прием отраженных от лоцируемых объектов эхо-сигналов осуществляется в паузах работы передатчика. В РЛС КНИ зондирующий сигнал (ЗС) представляет собой когерентную регулярную импульсную последовательность (РИП) с периодом следования импульсов, существенно меньшим задержки отраженного от цели эхо-сигнала. Такие сигналы обеспечивают высокое качество доплеровской селекции движущихся целей (СДЦ) на фоне паразитных помеховых переотражений от земной поверхности и возможность оценивать с высокой точностью дальность и скорость сопровождаемых целей.
Принципиальным недостатком реализованных в РЛС с регулярным КНИ известных способов импульсно-доплеровской радиолокации являются низкие обзорно-поисковые возможности таких РЛС из-за наличия непросматриваемых за один цикл зондирования "слепых" эквидистантно расположенных участков дальности, а также неоднозначности первичного местоопределения дальности обнаруженных целей. Для устранения отмеченных недостатков приходится в каждом угловом направлении производить n-кратное (n=3…5) зондирование пространства пачечным КНИ с различными частотами повторения импульсов [2, 5]. В результате, n-кратно снижается темп обзора пространства и, соответственно, возрастает расход время-энергетических ресурсов РЛС КНИ на решение обзорно-поисковых задач. В ряде РЛС КНИ этот недостаток частично устраняется применением раздельных на передачу и прием антенных систем, допускающих возможность одновременной работы РЛС на прием и передачу. В этом случае из процесса приема-обработки локационных сигналов исключается процедура бланкирования приемника РЛС на время излучения зондирующих посылок, а "ослепляющее" воздействие на РЛС радиочастотной энергетики зондирующих посылок и помеховых переотражений исключается их глубокой частотной режекцией в приемнике РЛС. Однако эта мера не всегда достаточна по эффективности режекции помех и не снимает проблемы обеспечения при использовании пачечных РИП ВЧП однозначного дальномерного местоопределения обнаруженных целей.
В [1-6] рассмотрены возможности преодоления отмеченных ограничений с использованием нерегулярных импульсных последовательностей (НИП) со свойством не более одного совпадения (с единичным уровнем боковых лепестков автокорреляционной функции). Однако при временных рассовмещениях эхо-сигналов относительно опорных такие НИП не обеспечивают требуемое для эффективной селекции движущихся целей (СДЦ) высокое качество спектральных сечений функции неопределенности. Аналогичная картина отмечается и в случаях использования фазо- и частотно-манипулированных сигналов [3, 4].
В качестве прототипа заявляемого объекта изобретения принят известный способ импульсно-доплеровской локации [1], заключающийся в обзоре пространства путем формирования и направленного излучения в каждом угловом элементе разрешения поискового пространства когерентной импульсной последовательности зондирующих посылок с общим числом и периодом следования, удовлетворяющих условиям достаточности для обнаружения целей частотно-скоростной избирательности РЛС и однозначности скоростного местоопределения обнаруживаемых целей, направленного приема в паузах работы передатчика РЛС эхо-сигналов целей и помеховых переотражений с последующей их времячастотной обработкой путем противопомехового взвешивания, частотной режекции помеховых переотражений и многоканальной по дальности и скорости корреляционно-фильтровой обработки принятых эхо-сигналов.
Недостатком известного способа импульсно-доплеровской радиолокации является низкая скорость обзора пространства по указанной выше причине - необходимости (3…5) - кратного лоцирования пространства в каждом угловом направлении для устранения «слепых» участков дальности и обеспечения однозначности дальностно-скоростного местоопределения обнаруживаемых целей.
Технической задачей предлагаемого способа является повышение скорости обзора пространства РЛС КНИ в условиях воздействия переотражений от земной поверхности.
Техническим результатом, обеспечивающим решение поставленной технической задачи, является исключение непросматриваемых за один цикл зондирования "слепых" участков дальности с возможностью однозначного дальностно-скоростного местоопределения обнаруженных целей.
Указанный технический результат и, как следствие, решение поставленной технической задачи достигается тем, что в известном способе импульсно-доплеровской радиолокации целей на фоне отражений от земной поверхности, заключающимся в обзоре пространства путем формирования и направленного излучения в каждом угловом элементе разрешения поискового пространства когерентной импульсной последовательности зондирующих посылок с общим числом и периодом следования, удовлетворяющих условиям достаточности для обнаружения целей частотно-скоростной избирательности РЛС и однозначности скоростного местоопределения обнаруживаемых целей, направленного приема в паузах работы передатчика РЛС эхо-сигналов целей и помеховых переотражений с последующей их времячастотной обработкой путем противопомехового взвешивания, частотной режекции помеховых переотражений и многоканальной по дальности и скорости корреляционно-фильтровой обработки принятых эхо-сигналов, согласно изобретению перед обзором пространства производят измерение плотности дальностно-скоростного распределения мощности помеховых переотражений, рассчитывают скорость малоиндексной гиперболической вобуляции периода следования и длительности зондирующих посылок, при формировании зондирующих импульсных посылок дополнительно вобулируют период повторения и длительность импульсных посылок в соответствии с рассчитанным гиперболическим законом, а в процессе времячастотной обработки принимаемые эхо-сигналы разделяют на линейно-частотно модулированные парциалы, для каждого текущего контролируемого дальностно-скоростного элемента разрешения поискового пространства оценивают выполнение условия непревышения заданного энергетического порога значения величины взаимной корреляции измеренной плотности распределения мощности помеховых переотражений и квадрата функции неопределенности отдельно взятых линейно-частотно модулированных парциалов зондирующего сигнала, центрированной в точке установки текущего контролируемого дальностно-скоростного элемента разрешения, и далее, по завершению раздельной для каждого парциала противопомехового взвешивания, частотной режекции и многоканальной по дальности и скорости корреляционно-фильтровой обработки, не удовлетворяющие вышеупомянутому условию корреляционно-фильтровые отклики парциалов эхо-сигнала бланкируют, после чего для каждого текущего контролируемого дальностно-скоростного элемента разрешения производят векторное суммирование небланкированных корреляционно-фильтровых откликов для согласованных по дальности и скорости линейно-частотно-модулированных парциалов эхо-сигнала с текущего контролируемого элемента разрешения.
Введение указанных выше отличий обеспечивает возможность реализации в одном цикле зондирования пространства беспровальной зоны обнаружения и однозначного дальностно-скоростного местоопределения обнаруженных целей за счет использования в РЛС КНИ составного многокомпонентного зондирующего сигнала (ЗС) с гиперболической интервальной и широтно-импульсной вобуляцией зондирующих посылок и ввода в цикл приемообработки ответных эхо-сигналов совокупности операций, позволяющих избирательно для каждого дальностно-скоростного элемента разрешения реконфигурировать структуру функции неопределенности (ФН) принимаемых эхо-сигналов в соответствии с характеристиками складывающейся фоно-помеховой обстановки. Такая реконфигурация выполнима благодаря возможности расщепления ЗС на ограниченное число взаимонепересекаемых в частотной области сигнальных парциалов, каждому из которых в ФН составного ЗС соответствует пространственно-локализованный фрагмент «ножевидной» формы. Конфигурация и ориентация фрагментообразующих парциалов ФН обладают поясняемой далее возможностью обеспечения высокой эффективности селекции движущихся целей (СДЦ) и однозначности первичных дальностно-скоростных измерений местонахождения обнаруженных целей.
Отмечаемая при гиперболической КНИ неэквидистантность расстановки зондирующих импульсных посылок исключает возникновение при однократном лоцировании пространства «слепых» участков дальности в практически значимой области зоны действия РЛС и обеспечивает однозначность первичных дальностно-скоростных измерений местонахождения обнаруженных целей..
Отмеченные технические нововведения позволяют достичь указанного выше технического результата и, как следствие, повысить скорость обзора пространства РЛС КНИ с сохранением высокого качества СДЦ.
Изобретение поясняется фиг.1-7.
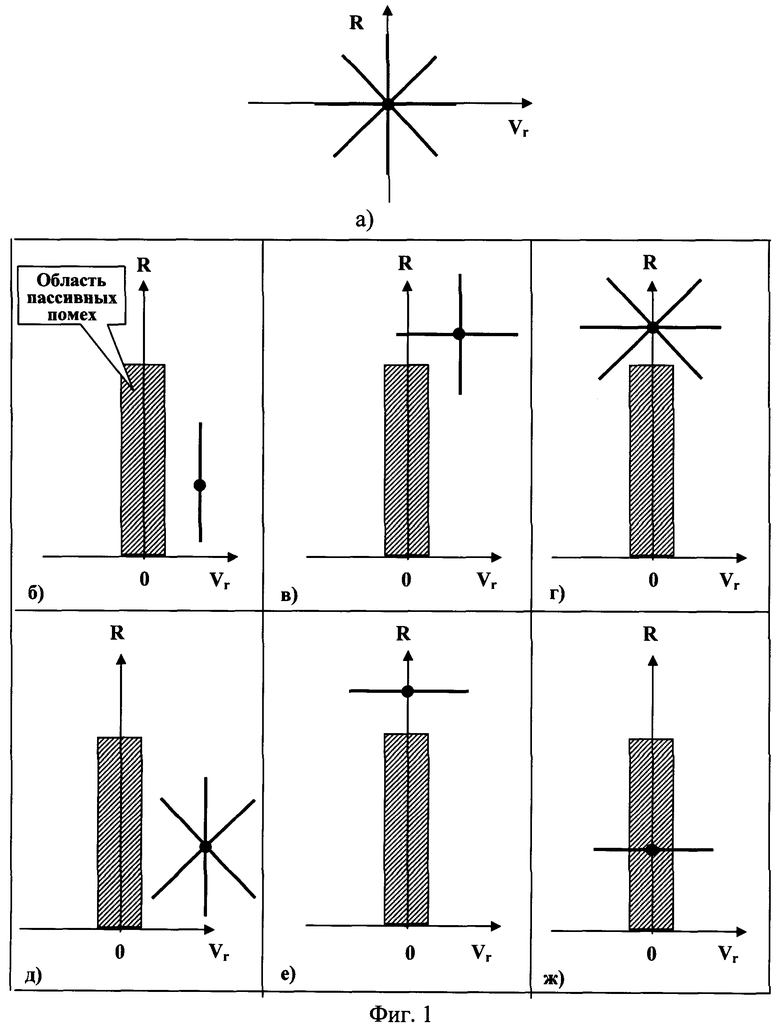
На фиг.1а приведена графическая иллюстрация идеализированной ФН составного ЗС со "звездно-лучевой" структурой, образованной четырьмя формообразующими парциалами ФН в виде взаимопересекаемых отрезков прямых разного наклона.
На фиг.1б-1ж приведена графическая иллюстрация различных вариантов реконфигурации ФН для случаев обнаружения цели в различных элементах разрешения поисковой дальностно-скоростной области, где штриховкой условно обозначена область интенсивных отражений от подстилающей поверхности и местных предметов в окрестности РЛС.
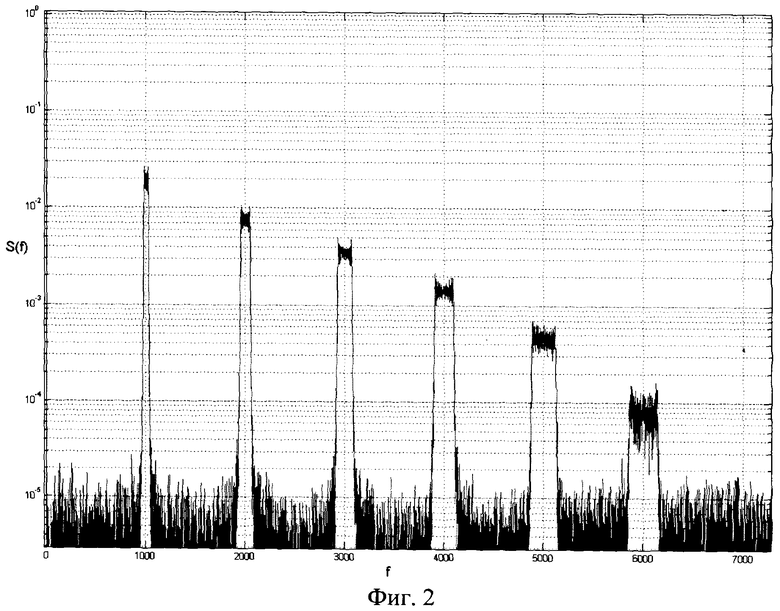
На фиг.2 приведена функция амплитудного спектра гиперболической нерегулярной импульсной последовательности (НИП).
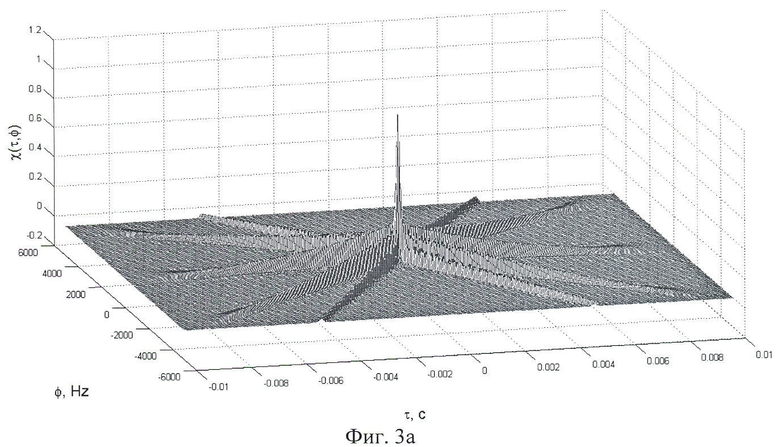
На фиг.3а приведено трехмерное изометрическое изображение ФН гиперболической НИЛ.
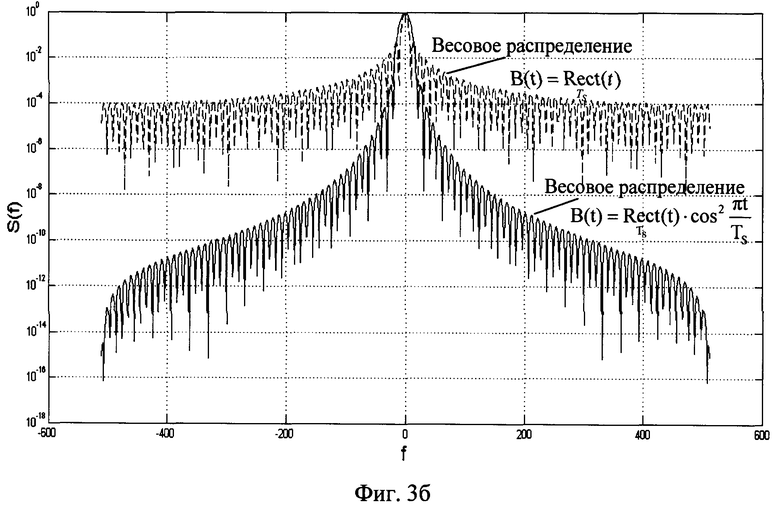
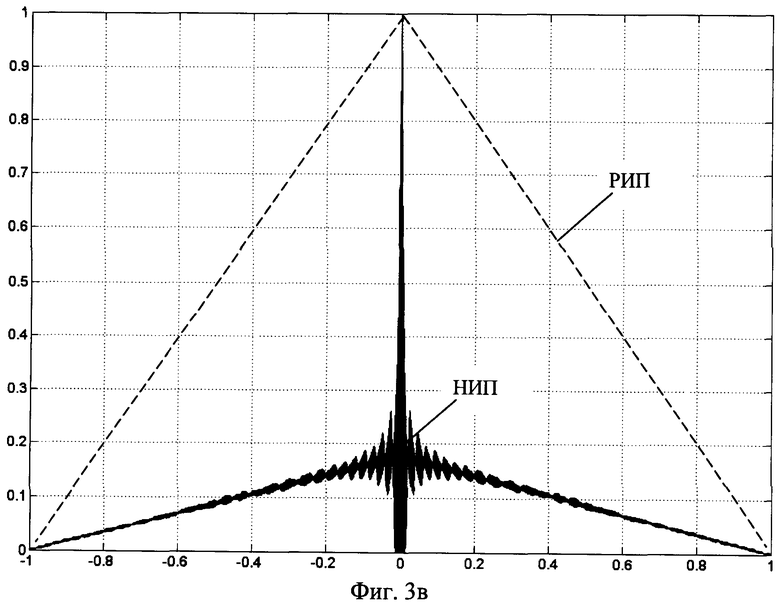
На фиг.3б,в - главные частотное и временное сечения ФН КНИ в виде эквидистантной РИП и гиперболической НИП.
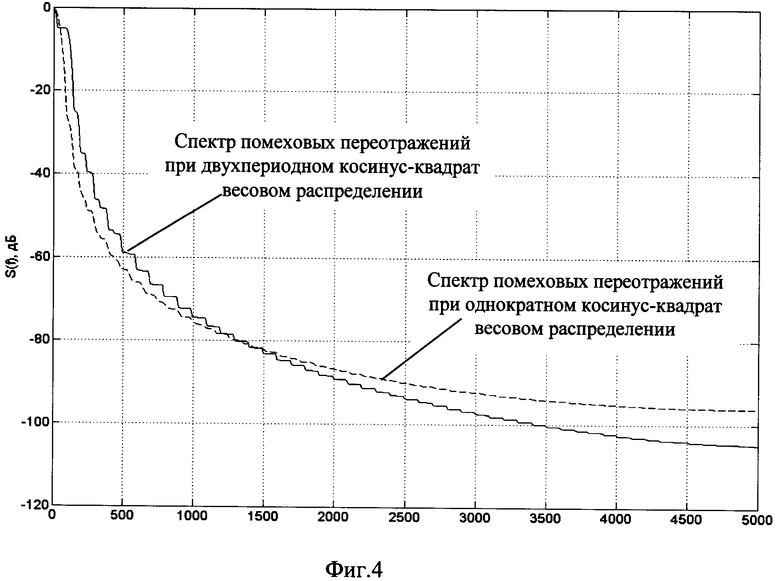
На фиг.4 - графики функций энергетического спектра принимаемых помеховых переотражений на выходах парциальных радиоприемных каналов (РПрК) при одно- и двухпериодном косинусквадратном весовом взвешивании принимаемых эхо-сигналов.
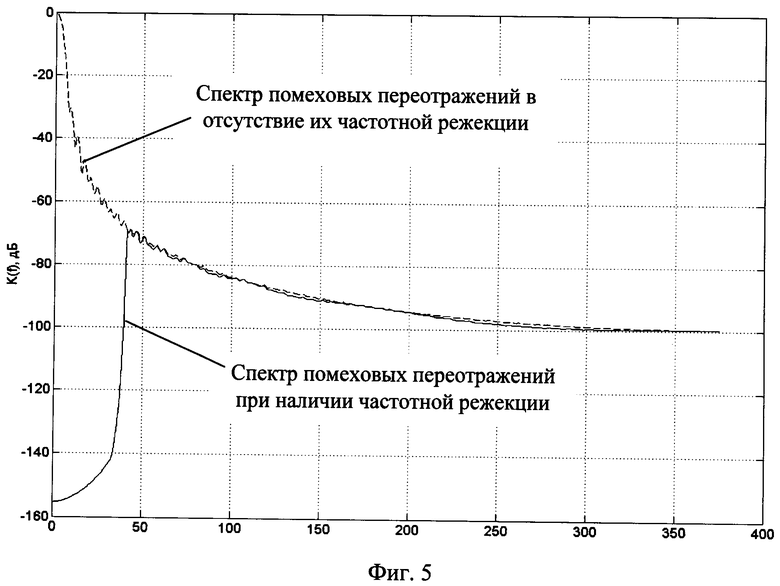
На фиг.5 - графики функций энергетического спектра помеховых переотражений на выходах парциальный РПрК в отсутствие и при наличии их частотной режекции.
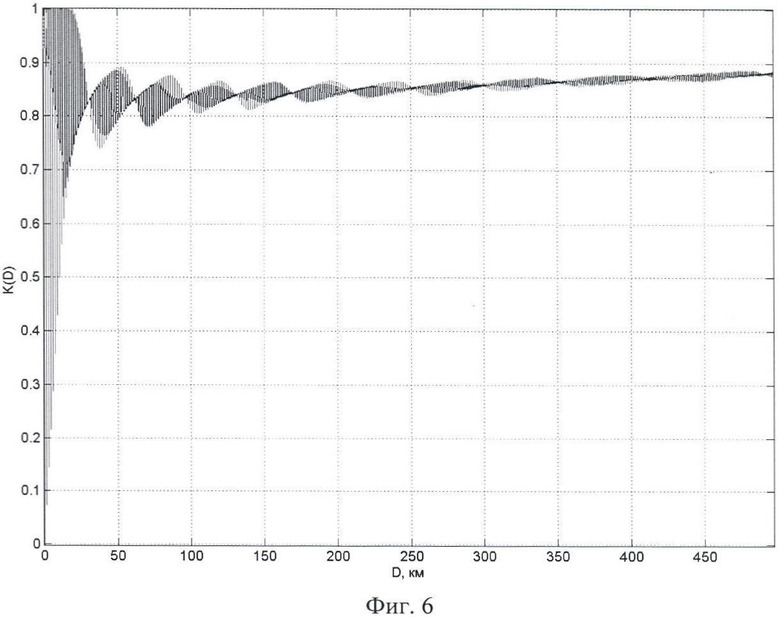
На фиг.6 - график зависимости коэффициента передачи схемой бланкирования приемника энергии принимаемых эхо-сигналов в тракт их времячастотной обработки в функции от времени запаздывания эхо-сигналов.
На фиг.7 - блок-схема РЛС с КНИ гиперболического типа.
Поясняемый фиг.1а-1ж принцип адаптивной к складывающейся помеховой обстановке реконфигурации ФН ЗС основан на принципах теории оптимизации характеристик ЗС и оптимального приема целевых эхо-сигналов на фоне помеховых, предусматривающими минимизацию взаимопересечения помехонасыщенных участков лоцируемого пространства с областью высоких уровней ФН зондирующего сигнала, центрированного в точке установки текущего контролируемого элемента разрешения. Процесс реконфигурации состоит в устранении помехонасыщенных фрагментов ФН путем режекции и бланкирования соответствующих этим фрагментам составляющих эхо-сигнала на этапе их обработки.
Осуществление указанной режекции и бланкирования помеховых сигналов сопряжено с уменьшением энергетики не только помеховых, но и полезных эхо-сигналов, что допустимо по следующим причинам:
- при работе по целям в помехонасыщенной ближней зоне действия РЛС отмечается избыток энергии эхо-сигналов близко расположенных целей;
- дальняя зона действия РЛС, как правило, существенно менее загружена пассивными помехами и потребность в реконфигурации ФН практически исключается (см. фиг.1г).
Для реализации принципа программно-адаптивной реконфигурации ФН локационных сигналов используют составной ЗС в виде нерегулярной импульсной последовательности (НИП) с гиперболической малоиндексной вобуляцией периода повторения (Ti) и длительности (τi) импульсов:

где i, (N+1) - нумерация и общее количество импульсов в пачке соответственно;
 - модулирующая ректанг-функция, обозначающая прямоугольный импульс единичной высоты длительностью τi, позицированный на временной оси в точке t=0;
- модулирующая ректанг-функция, обозначающая прямоугольный импульс единичной высоты длительностью τi, позицированный на временной оси в точке t=0;
 - временная расстановка импульсов НИП;
- временная расстановка импульсов НИП;

Ti≈T0+2a(i+0,5)T0 3 - значение периода повторения импульсов пачки в окрестности i-го импульса;
 - длительность i-го импульса пачки;
- длительность i-го импульса пачки;
α - скорость линейной малоиндексной вобуляции ЧПИ, удовлетворяющей условию ΔFп=α·Ts<<Fп;
 - общая длительность пачки радиоимпульсов;
- общая длительность пачки радиоимпульсов;
F0, T0, τo - начальные значения ЧПИ, периода следования и длительности импульсов пачки соответственно;
 - закон изменения текущего значения частоты повторения импульсов (ЧПИ);
- закон изменения текущего значения частоты повторения импульсов (ЧПИ);
h=Ti/τi=const - скважность импульсной последовательности;
ωн, φ0 - несущая частота и начальная фаза высокочастотного заполнения НИП.
Гиперболическая НИП (1) является аддитивной композицией линейно-частотно-модулированных (ЛЧМ) колебаний, обеспечивающих при условии ΔЕП=α·Ts<<fп, FП>(2…3)fДЦ,  требуемую линейно-"ножевую" звездную структуру высокоуровневой области функции неопределенности (ФН) с возможностью ее программно-адаптивной реконфигурации
требуемую линейно-"ножевую" звездную структуру высокоуровневой области функции неопределенности (ФН) с возможностью ее программно-адаптивной реконфигурации

где τ, fд - сдвиги НИП по временной задержке и частоте Доплера соответственно;
Fп, ΔFп - среднее значение ЧПИ и ее девиация;
fдц - верхняя граница диапазона доплеровских частот целевых эхо-сигналов;
 - общая длительность пачки радиоимпульсов;
- общая длительность пачки радиоимпульсов;
 - весовые коэффициенты суммируемого ряда,
- весовые коэффициенты суммируемого ряда,
sinc(x) - функция вида 
Соответственно, выражения для главных частотного и временного сечений функции неопределенности гиперболического НИП имеют вид:


Для иллюстрации отмеченных выше особенностей составного гиперболического НИП-сигнала на фиг.2, 3 приведены результаты компьютерных расчетов двумерной ФН НИП, а также ее главных частотного и временного сечений (сплошные линии). При этом в качестве исходных данных приняты следующие параметры НИП:
- количество импульсов в пачке - N=700;
- скважность импульсной последовательности - h=8;
- соотношение начального и конечного периодов повторения импульсов ti/tn=1,5.
Для сравнения, на фиг.3в пунктиром приведено также главное временное сечение функции неопределенности РИП-сигнала с теми же характеристиками, но в отсутствие вобуляции периода следования и длительности зондирующих посылок. Для главных частотных сечений ФН РИП и НИП сигналов отмечается их полное совпадение.
Сравнение представленных частотно-временных характеристик НИП-сигнала позволяет сделать следующие выводы:
- в отличие от РИП функция неопределенности гиперболической НИП обладает унимодальной структурой, обеспечивающей возможность реализации однозначной оценки дальностно-скоростных параметров обнаруживаемых целей при однократном цикле зондирования лоцируемого пространства;
- главные спектральные сечения ФН регулярной и гиперболической нерегулярной импульсных последовательностей идентичны, что обеспечивает потенциально высокую частотную селективность гиперболических эхо-сигналов на фоне интенсивных мешающих переотражений, свойственную РИП-сигналам;
- введение линейной вобуляции ЧПИ обеспечивает реализацию практически беспровальной по дальности зоны обзора.
По результатам теоретических и цифровых модельных исследований определен перечень ключевых условий обеспечения предельных характеристик качества помехоподавления, представленных системой неравенств вида
 ,
,
 ,
,
Ts≥(10…20)τпп,
 ,
,
N≥(0,5…1)·103>>2(NБЛ+NРФ),
где  - среднее значение ЧПИ;
- среднее значение ЧПИ;
τпп - верхняя граница диапазона временных задержек помеховых переотражений от подстилающей поверхности и местных предметов;
fд.max - верхняя граница диапазона доплеровских частот целевых эхо-сигналов;
 - длительность зондирующего пачечного сигнала;
- длительность зондирующего пачечного сигнала;
α - скорость линейной вобуляции ЧПИ;
N+1 - количество импульсов в составе пачечного зондирующего сигнала;
Nбл - количество элементов НИП, бланкируемых на время установления переходных процессов;
Nрф - количество элементов НИП, приходящихся на время установления процесса режекции ПП;
h - скважность зондирующих посылок;
B(t) - весовое окно в виде двухпериодного косинус-квадратного распределения.
Физическая суть перечисленных ограничений в выборе параметров гиперболических НИП и режима их весовой обработки характеризуется следующими положениями.
Среднее значение ЧПИ  задается исходя из требований обеспечения однозначности функциональной связи величины доплеровского сдвига целевых эхо-сигналов (fд) и радиальной скорости перемещения цели (VR), а также предельно возможного частотного разноса ЛЧМ-парциалов для создания свободных от пассивных помех частотных зон.
задается исходя из требований обеспечения однозначности функциональной связи величины доплеровского сдвига целевых эхо-сигналов (fд) и радиальной скорости перемещения цели (VR), а также предельно возможного частотного разноса ЛЧМ-парциалов для создания свободных от пассивных помех частотных зон.
Для обеспечения высокой частотной избирательности применяемых сигналов, являющейся основой эффективной скоростной селекции целевых эхо-сигналов на фоне помеховых, длительность зондирующих сигналов (Ts) и соответственно количество импульсов в пачке (N+1) выбирается предельно высокой, многократно превосходящей эффективную протяженность (τпп) примыкающей к РЛС помехообразующей области.
Скорость линейной вобуляции ЧПИ (α) устанавливают исходя из условия недопущения:
- взаимного пересечения эквидистантно (с шагом  ) расположенных частотных парциалов энергетического спектра НИП
) расположенных частотных парциалов энергетического спектра НИП
 ,
,
где ΔFп - девиация ЧПИ в пределах всей длительности пачечного сигнала  ;
;
- разрывных деформаций огибающей помеховых эхо-сигналов при бланкировании приемника на время излучения зондирующих посылок, благодаря чему практически исключено «размывание» спектра бланкированных помеховых переотражений, необходимое для обеспечения высокой эффективности их частотно-скоростной режекции.
Величину скважности зондирующих посылок (h), определяющей размеры остаточных «слепых» дальностей в ближней зоне, уровень боковых лепестков автокорреляционной функции (АКФ)  и ширину главного максимума функции автосвертки гиперболической НИП
и ширину главного максимума функции автосвертки гиперболической НИП  , предельно максимизируют путем выбора генераторного прибора и режима его работы в составе передатчика РЛС.
, предельно максимизируют путем выбора генераторного прибора и режима его работы в составе передатчика РЛС.
Использование двухпериодного  косинус-квадратного весового распределения позволяет снизить рассогласование огибающей бланкированного эхо-сигнала и формы весового окна в широком диапазоне временных задержек помеховых эхо-сигналов. Это обеспечивает дополнительное по отношению к однопериодному весовому распределению снижение уровня боковых лепестков функции энергетического спектра аддитивной смеси бланкированных помеховых эхо-сигналов со всей дистанции зоны помеховых переотражений на 3…5 дБ, благодаря чему минимизируется «затекание» энергии помеховых сигналов в частотную область нахождения целевых эхо-сигналов. Целесообразность применения двухпериодного весового распределения взамен классического однопериодного косинус-квадратного распределения Хана [3] обусловлена возможностью сглаживания резких скачкообразных и линейно-ломаных переходов огибающей эхо-сигнала не только в области ее переднего и заднего фронтов, но и в ее центральной области. Платой за отмеченный выигрыш является примерно двукратное ухудшение частотно-скоростного разрешения целей, что допустимо при учете имеющегося избытка этого разрешения в случае применения КНИ ВЧП.
косинус-квадратного весового распределения позволяет снизить рассогласование огибающей бланкированного эхо-сигнала и формы весового окна в широком диапазоне временных задержек помеховых эхо-сигналов. Это обеспечивает дополнительное по отношению к однопериодному весовому распределению снижение уровня боковых лепестков функции энергетического спектра аддитивной смеси бланкированных помеховых эхо-сигналов со всей дистанции зоны помеховых переотражений на 3…5 дБ, благодаря чему минимизируется «затекание» энергии помеховых сигналов в частотную область нахождения целевых эхо-сигналов. Целесообразность применения двухпериодного весового распределения взамен классического однопериодного косинус-квадратного распределения Хана [3] обусловлена возможностью сглаживания резких скачкообразных и линейно-ломаных переходов огибающей эхо-сигнала не только в области ее переднего и заднего фронтов, но и в ее центральной области. Платой за отмеченный выигрыш является примерно двукратное ухудшение частотно-скоростного разрешения целей, что допустимо при учете имеющегося избытка этого разрешения в случае применения КНИ ВЧП.
На фиг.4 приведен график реализуемого снижения уровня боковых лепестков распределения спектральной плотности помехи (СПП) при переходе от классического однопериодного к двухпериодному косинус-квадратному весовому распределению. Величина этого снижения в рабочей зоне нахождения откликов целевых эхо-сигналов составляет ~(3…6) дБ.
Потенциальные селективные возможности гиперболических НИП в обеспечении выделения целевых эхо-сигналов на фоне помеховых иллюстрируются соответствующими графическими материалами, полученными по результатам числовых модельных экспериментов.
На фиг.5 приведен график функции распределения энергетической спектральной плотности помехи (СПП) для случая неподвижных элементов паразитного рассеяния (σVпп=0) в отсутствии и при наличии режекции ПП в области нулевых доплеровских частот. Числовое моделирование производилось для следующих исходных данных:
N≈103;
 ;
;
 ;
;
h=8;
- тип подстилающей поверхности РЛС - однородный, неподвижный (σV=0);
- спад интенсивности переотражений по задержке -  [6];
[6];
- тип весовой обработки эхо-сигналов - двухпериодный косинус-квадратный.
В отличие от способов приема-обработки нерегулярных малоимпульсных последовательностей с использованием принципов череспериодной компенсации (ЧПК) [1] в рассматриваемом случае по завершению частотно-скоростной режекции ПП в каждом элементе дальности аддитивную смесь помеховых и целевых эхо-сигналов в контролируемом диапазоне доплеровских сдвигов целевых эхо-сигналов расфильтровывают с применением многоканальной линейки («гребенки») узкополосных доплеровских фильтров. При этом дополнительно на ~20…30 дБ сокращается энергетика помеховых сигналов, «просачивающихся» в одиночный целевой фильтровой канал, при практически неослабленном прохождении целевых эхо-сигналов.
На фиг.6 приведен график для коэффициента передачи энергетики эхо-сигналов в приемник РЛС при их бланкировании на время излучения зондирующих посылок В(τ) для аналогичных вышерассмотренных исходных данных. Анализ представленной зависимости показывает, что применение вобуляции ЧПИ практически снимает вопрос существования «слепых» дальностей. Малоразмерные остаточные «слепые» дальности, характеризуемые снижением энергетики принимаемых целевых эхо - сигналов свыше 3дБ, наблюдаются лишь в ближней зоне в первых (3…5) развертках периода следования зондирующих посылок. С учетом наличия в ближней зоне избытка энергии целевых эхо-сигналов это позволяет реализовать однотемповый цикл зондирования пространства на всю глубину требуемой зоны обзора лоцируемого пространства.
Техническая реализация предлагаемого способа функционирования импульсно-доплеровских РЛС с использованием составных расщепляемых на ЛЧМ-парциалы гиперболических НИП сопряжена с необходимостью изменения процесса формирования, приема и обработки принимаемых локационных сигналов (ПЛС), который реализован в прототипе [1]. Требуются следующие нововведения в цикл формирования, приема и обработки ПЛС:
- измерение плотности дальностно-скоростного распределения мощности помеховых переотражений на предшествующем обзору пространства интервалу времени в каждом угловом направлении;
- расчет параметра а интервальной (Ti) и широтно-импульсной (τi) вобуляции зондирующих посылок;
- гиперболическая вобуляция длительности и периода следования излучаемых РЛС зондирующих посылок;
- переход к использованию принципа бесстробовой обработки ПЛС с разделением их не во временной (с временным стробированием ПЛС), а в частотной области, при котором производится частотное разделение эхо-сигналов на ЛЧМ-парциалы;
- расчет бланкируемых каналов корреляционно-фильтровой обработки эхо-сигналов исходя из условия недопущения взаимопересечения примыкающей к РЛС области высокомощных помеховых переотражений и области высокоуровневых значений ФН ЛЧМ парциалов целевых эхо-сигналов.
- программно-управляемая выборочная для каждого элемента разрешения коммутация сигналов корреляционно-фильтровой обработки отдельно взятых ЛЧМ парциалов ПЛС для их последующего векторного суммирования;
- векторное суммирование отфильтрованных сжатых ЛЧМ парциалов.
Все дополнительно включенные в процессе формирования зондирующих посылок и приема-обработки сигналов операции являются физически реализуемыми и не требуют выхода за рамки современной радиоэлектронной схемотехники, существующих алгоритмических разработок и широко применяемых программных продуктов, реализованных в современных цифровых сигнальных процессорах [7, 8].
На фиг.7 приведена упрощенная версия построения приемообрабатывающей и передающей части РЛС КНИ с рассмотренным принципом зондирования пространства и организации приема - обработки локационных эхо-сигналов.
На фиг.7 приняты следующие нумерация и обозначения составных элементов блок-схемы РЛС КНИ:
1 - антенна;
2 - циркулятор;
3 - передатчик РЛС;
4 - схема бланкирования радиоприемного тракта;
5 - приемоусилительный тракт;
6 - АЦП;
7 - бесквадратурный цифровой фазовый детектор;
8 - формирователь импульсов запуска передатчика РЛС;
9 - вычислитель параметров интервальной и широтно-импульсной вобуляции ЗС в текущем цикле зондирования пространства;
10 - цифровой блок управления (ЦБУ);
11 - определитель бланкируемых каналов корреляционно-фильтровой обработки;
12 - блок выборки канальных сигналов корреляционно-фильтровой обработки;
13 - цифровой полосовой фильтр;
14 - цифровой сигнальный процессор;
15 - буферное ОЗУ;
16 - блок векторного сложения сигналов корреляционно-фильтровой обработки;
17 - блок измерения плотности дальностно-скоростного распределения мощности помеховых переотражений.
Опосредованный в приведенном блок-схемном решении заявленный способ определил следующие особенности его реализации:
- введение блока 17 измерения плотности дальностно-скоростного распределения помеховых переотражений и блока 9 для расчета параметров интервальной (Ti) и широтно-импульсной (τi) вобуляции ЗС;
- наличие формирователя (8) зондирующих сигналов с вобулированной частотой повторения и длительностью зондирующих посылок;
- частотное разделение преобразованных в цифровой формат ПЛС с помощью цифровых полосовых фильтров (ЦПФ) (13);
- применение раздельной цифровой корреляционно-фильтровой обработки ("сжатия") ЛЧМ парциалов эхо-сигналов реализуемой сигнальными процессорами (14);
- включение в состав обзорного приемника определителя (12) бланкируемых каналов корреляционно-фильтровой обработки ПЛС;
- наличие элементов (блоков 12…15), обеспечивающих выборочную для каждой поисковой ячейки дальностно-скоростного разрешения коммутации небланкированных каналов обработки ко входу векторного сумматора "сжатых" ЛЧМ парциалов.
Наиболее трудоемкая из перечисленных операций многоканальная корреляционно-фильтровая обработка эхо-сигналов может быть реализована в соответствии с интегральной сверточной композицией вида:

где 
 - комплексно-значная запись спектра k-го ЛЧМ парциала принятого ответного и опорного локационных сигналов соответственно;
- комплексно-значная запись спектра k-го ЛЧМ парциала принятого ответного и опорного локационных сигналов соответственно;
τц, ωдц - временная задержка и доплеровский сдвиг целевого эхо-сигнала;
е-jωτ- ядро преобразования Фурье;
ωHk, ωBk - граничные значения частотной полосы k-o ЛЧМ парциала.
Необходимое для расчета скорости вобуляции ЧПИ (α) и работы определителя бланкируемых каналов корреляционно-фильтровой обработки описание области высокомощных помеховых переотражений Р(τ, ωд), как правило, формируется по результатам предварительных измерений помехового рельефа ("помеховой карты") в точке стояния РЛС КНИ на этапе, предшествующем рабочему циклу поиска интересуемых объектов локации.
С учетом малой динамики линейных перемещений элементов паразитного переизлучения зондирующих посылок РЛС (растительным покровом, морской поверхностью и т.д.) [6] измерение помехового рельефа может производиться РЛС с КНИ с использованием ЗС в виде регулярных импульсных последовательностей низкой ЧПИ, определяемой из условия

кГц при высоте поднятия антенной системы РЛС до 30…50 м.
Не исключена и возможность цифрового синтеза «помеховой карты» с применением цифровой карты района дислокации РЛС.
Алгоритм работы определителя бланкируемых каналов корреляционно-фильтровой обработки эхо-сигналов базируется на вычислении корреляционного интеграла вида
k=[-0,5h;+0,5h],
где  - координаты текущего контролируемого дальностно-скоростного элемента разрешения;
- координаты текущего контролируемого дальностно-скоростного элемента разрешения;
(0, τпп), (ωпн, ωпв) - границы области помеховых переотражений;
Р(τ, ωд) - энергетическая плотность распределения помеховых переотражений в координатах (τ, ωд);
ψк(τ, ωд) - функция неопределенности k-го ЛЧМ-парциала зондирующего многокомпонентного сигнала;
Bk, Ck - символьные обозначения принимаемых решений о бланкировании или открытии канала приемообработки k-го ЛЧМ-парциала принятого локационного сигнала;
Р0 - пороговая величина корреляционного интеграла, по превышении
которой канал приемообработки k-ого ЛЧМ парциала в точке бланкируется.
Таким образом, предлагаемый способ импульсно-доплеровской радиолокации обеспечивает недоступный для аналогов и прототипа эффект реализации практически беспровальной по дальности зоны обнаружения РЛС целей с возможностью однозначного измерения их дальности и скорости при однократном цикле зондирования пространства. При этом n - кратно (n≈2…4) повышается скорость обзора надрадиогоризонтной маловысотной области пространства в условиях воздействия на РЛС интенсивных переотражений от земной поверхности и практически сохраняется реализуемая при использовании РИП высокая степень подавления мешающих переотражений, что соответствует цели данного изобретения.
Изобретение выполнено на уровне технического предложения и реализовано на ПЭВМ в виде математической имитационно - стохастической модели.
Результаты проведенных модельных экспериментов подтверждают работоспособность и высокую эффективность функционирования РЛС КНИ гиперболического типа с предлагаемым способом формирования и приемообработки локационных сигналов.
Изобретение может быть использовано в подсистемах совместного приема-обнаружения и измерения время - частотных сдвигов принимаемых локационных сигналов (ПЛС) обзорных, многофункциональных и специализированных РЛС с квазинепрерывным излучением (КНИ) при работе в условиях воздействия интенсивных переотражений от земной поверхности и местных предметов.
Источники, принятые во внимание
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Сов. Радио, 1981, стр.119.
2. Трухачев А.А. Радиолокационные сигналы и их применение. - М.: Военное издательство, 2005.
3. Кук Ч., Бернфельд М. Радиолокационные сигналы: Пер. с англ. / Под ред. B.C.Кельзона. - М.: Сов. Радио, 1971.
4. Френкс Л. Теория сигналов: Пер. с англ. / Под ред. В.Е.Вакмана. - М.: Сов радио, 1974.
5. Справочник по радиолокации под ред. М.И.Сколника. Т.3. - М.: Сов. Радио, 1976.
6. Справочник по радиолокации под ред. М.И.Сколника. T.1. - М.: Сов. Радио, 1979.
7. Рабинер Л., Голд Б. Теория и применение цифровой обработки сигналов. - М.: Мир, 1978.
8. Лайонс Р. Цифровая обработка сигналов: Пер. с англ. / Под ред. А.А.Бритова. - М.: «Бином», 2006.
Изобретение относится к области радиолокации. Достигаемый технической результат изобретения - повышение скорости обзора пространства радиолокационной станцией в условиях воздействия переотражений от земной поверхности за счет исключения непросматриваемых за один цикл зондирования «слепых» участков дальности и реализации однозначного дальностно-скоростного местоопределения обнаруживаемых целей. Повышение скорости обзора пространства обеспечивается малоиндексной интервальной и широтноимпульсной гиперболической вобуляцией зондирующих посылок и реализацией адаптированной к специфике составного зондирующего сигнала. Для каждого отдельно взятого дальностно-скоростного элемента разрешения поискового пространства производится противопомеховое согласование реализуемой конфигурации функции неопределенности режектированного принятого эхосигнала с дальностно-скоростным распределением мощности помеховых переотражений, принятый эхо-сигнал с помощью полосовых частотных фильтров разделяют на ЛЧМ парциалы, которые подвергают раздельной корреляционно-фильтровой обработке, после чего для каждого дальностно-скоростного элемента разрешения поискового пространства селектируют и векторно суммируют свободные от помех линейно-частотно-модулированные составляющие целевых эхо-сигналов. 3 з.п. ф-лы, 7 ил.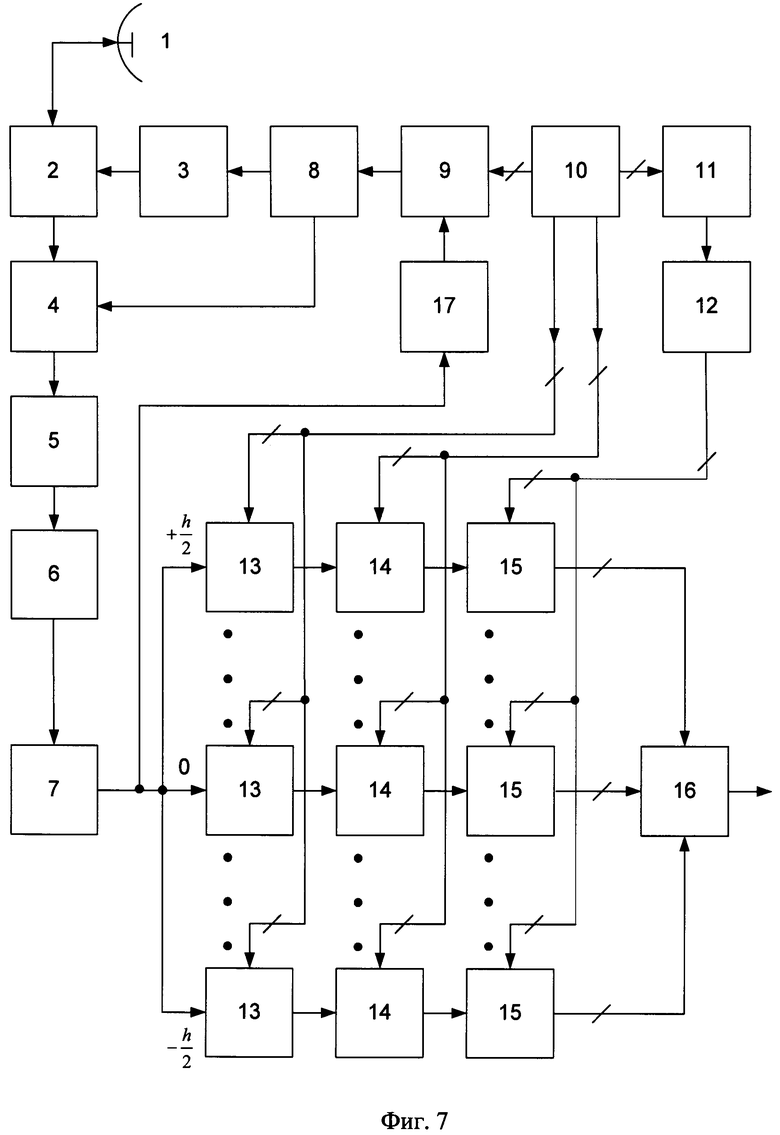
1. Способ обзорной импульсно-доплеровской радиолокации целей на фоне переотражений от земной поверхности, заключающийся в обзоре пространства путем формирования и направленного излучения в каждом угловом элементе разрешения поискового пространства когерентной импульсной последовательности зондирующих посылок с общим числом и периодом следования, удовлетворяющих условиям достаточности частотно-скоростной избирательности РЛС для обнаружения целей и однозначности скоростного местоопределения обнаруживаемых целей, направленного приема в паузах работы передатчика РЛС эхо-сигналов целей и помеховых переотражений с последующей их времячастотной обработкой путем противопомехового взвешивания, частотной режекции помеховых переотражений и многоканальной по дальности и скорости корреляционно-фильтровой обработки принятых эхо-сигналов, отличающийся тем, что перед обзором пространства производят измерение плотности дальностно-скоростного распределения мощности помеховых переотражений, рассчитывают скорость дополнительно вводимой гиперболической вобуляции периода следования и длительности зондирующих посылок, при формировании зондирующих импульсных посылок дополнительно вобулируют период следования и длительность импульсных зондирующих посылок в соответствии с рассчитанным гиперболическим законом, а в процессе времячастотной обработки принимаемые эхо-сигналы разделяют на линейно-частотно модулированные парциалы, для каждого текущего контролируемого дальностно-скоростного элемента разрешения поискового пространства оценивают выполнение условия непревышения заданного энергетического порога значения величины взаимной корреляции измеренной плотности распределения мощности помеховых переотражений и квадрата функции неопределенности отдельно взятых линейно-частотно модулированных парциалов зондирующего сигнала, центрированной в точке установки текущего контролируемого дальностно-скоростного элемента разрешения, и далее по завершении раздельной для каждого парциала противопомехового взвешивания частотной режекции и многоканальной по дальности и скорости корреляционно-фильтровой обработки не удовлетворяющие вышеупомянутому условию корреляционно-фильтровые отклики парциалов эхо-сигнала бланкируют, после чего для каждого текущего контролируемого дальностно-скоростного элемента разрешения производят векторное суммирование небланкированных корреляционно-фильтровых откликов для согласованных по дальности и скорости линейно-частотно модулированных парциалов эхо-сигнала с текущего контролируемого элемента разрешения.
2. Способ по п.1, отличающийся тем, что период следования Ti и длительность τi импульсных зондирующих посылок вобулируют согласно формуле
Ti≈T0+2α(i+0,5)T0 3, i=-0,5N…+0,5N,
где Тi;, T0 - текущее и начальное значения периода следования импульсных
зондирующих посылок соответственно;
N - количество импульсных посылок;
i - нумерация позиций импульсов в N посылке;
α - скорость гиперболической модуляции периода следования и
длительности зондирующих посылок;
h=Const - скважность зондирующих посылок.
3. Способ по п.2, отличающийся тем, что скорость α гиперболической вобуляции периода следования и длительности зондирующих посылок рассчитывают по формуле
где - суммарная длительность последовательности зондирующих посылок;
 - среднее значение периода повторения зондирующих посылок;
- среднее значение периода повторения зондирующих посылок;
 - среднее значение частоты повторения зондирующих посылок;
- среднее значение частоты повторения зондирующих посылок;
τпп - верхняя граница диапазона временных задержек помеховых
переотражений.
4. Способ по п.1, отличающийся тем, что противопомеховое взвешивание эхо-сигналов производят с использованием двухпериодного косинус-квадратного весового распределения вида
 , t∈[-0.5Ts,+0.5Ts],
, t∈[-0.5Ts,+0.5Ts],
где B(t) - функция весового распределения;
t - текущее время;
Rect(t) - модулированная ректанг-функция, обозначающая прямоугольный Ts
импульс диничной высоты длительностью Ts, позиционированный на временной оси в точке t=0.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: изд | |||
| «Советское радио», 1981, с.119 | |||
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ НА ФОНЕ СИЛЬНЫХ ИМПУЛЬСНЫХ ПОМЕХ В ПРИЕМНОМ КАНАЛЕ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2007 |
|
RU2334247C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕСКОЛЬКИХ ЦЕЛЕЙ, ИСПОЛЬЗУЕМЫЙ ПРЕЖДЕ ВСЕГО В ОБЗОРНЫХ РАДИОЛОКАТОРАХ С БОЛЬШИМ КОЛИЧЕСТВОМ ЛУЧЕЙ, ФОРМИРУЕМЫХ ПО УГЛУ МЕСТА | 2003 |
|
RU2317565C2 |
| RU 2052836 С1, 20.01.1996 | |||
| US 6166678 А, 26.12.2000 | |||
| US 2008316090 A1, 25.12.2008 | |||
| WO 2005066649 A3, 03.01.2008 | |||
| Устройство для пескоструйной обработки изделий | 1990 |
|
SU1810279A1 |

