Предлагаемое техническое решение относится к области радиолокации и может быть использовано для повышения помехозащищенности РЛС в отношении помех, воздействующих по боковым лепесткам антенны.
Одной из наиболее эффективных помех для РЛС в настоящее время
является имитационная, образуемая путем многократного переизлучения принятого постановщиком помех рабочего сигнала РЛС. Высокая эффективность ее объясняется тем, что из-за ее дискретности может быть достигнута большая импульсная мощность при сравнительно небольшой средней, и при этом ее параметры соответствуют характеристике канала оптимальной обработки РЛС, т.к. она представляет собой размноженную копию сигнала РЛС.
Основной эффект от ее воздействия - создание высокого уровня ложной тревоги и перегрузка устройств обработки РЛС, достигается в области боковых лепестков и фона диаграммы направленности антенны (ДНА) при нахождении постановщика помех на значительно большей дальности от РЛС по сравнению с постановщиком шумовой помехи.
Известные способы устранения импульсных помех на основе межпериодной обработки, например, в устройстве СДЦ не дадут положительного результата, поскольку постановщик помех излучает помеху синхронно с излучением РЛС, причем, от периода к периоду изменяет параметры сигнала, имитируя движение целей.
Известен способ подавления, который реализуется в устройстве для защиты от помех в области боковых лепестков антенной решетки (ФАР). Устройство содержит последовательно включенные передатчик, циркулятор, приемник и блок обнаружения и измерения координат целей, ФАР, подключенная сигнальным выходом ко второму входу циркулятора, блок управления фазовращателями, выход которого подключен к управляющему входу ФАР, блок управления положением луча, два выхода которого подключены ко второму входу блока обнаружения и измерения координат целей и входу блока управления фазовращателями, генератор синхроимпульсов, выход которого подключен ко входу передатчика и третьему входу блока обнаружения и измерение координат целей, а также модулятор фазы фазовращателей, включенный между выходом генератора синхроимпульсов и дополнительным входом блока управления.
Суть способа и работа устройства основаны на том, что для РЛС с ФАР при выборе определенного количества фазовращателей и дискретном изменении в них фазового состояния, например, на величину ±180° фаза главного лепестка ДНА практически не изменится, а фаза боковых будет изменяться в пределах 0-180°. При введении модуляции в процессе приема сигналы бокового направления ФАР будут искажаться и приближаться по своей структуре к шумовым импульсам и через устройство обработки не пройдут.
Недостаток способа и устройства состоит в том, что они могут быть применены лишь в РЛС с ФАР и не применимы в РЛС, не имеющих электронного управления лучом антенны. Кроме того, внедрение их в уже разработанные РЛС даже с ФАР вызовет большие трудности, если в устройстве управления фазовым состоянием ФАР отсутствует дополнительный вход для подключения модулятора фазы.
Известен способ амплитудного подавления боковых лепестков (ПБЛ) антенны на прием (Крони Д., Уоллис П. Системы подавления боковых лепестков диаграммы направленности антенны первичного радиолокатора. Зарубежная радиоэлектроника, 1966, № 5, с. 12-30) основанный на том, что в приемном канале РЛС в дополнение к сигналу, снимаемому с основной антенны, принимается сигнал антенной ПБЛ с ДН, перекрывающей уровень боковых лепестков основной антенны. При приеме сигналов со всех направлений кроме главного, уровень сигнала в канале ПБЛ должен превышать уровень сигнала основного канала. По результатам сравнения этих уровней принимается решение об отнесении принятого сигнала к сигналам главного направления либо бокового.
Этот способ имеет ряд недостатков. Необходимо иметь стабильные линейные амплитудные характеристики основного канала и канала ПБЛ в широком динамическом диапазоне, т.к. при ограничении сигнала или нарушении соотношения усилений каналов может подавляться сигнал главного направления, либо отсутствовать подавление бокового.
Наиболее близким техническим решением к предлагаемому является способ когерентной компенсации помех (Защита от радиопомех. Под ред. Максимова М.В. М.: Сов. радио, 1976, с. 220). Суть этого способа состоит в том, что сигнал помехи принимается основной остронаправленной антенной и компенсационной, охватывающей область боковых лепестков основной ДНА, при этом на выходах основного и компенсационного каналов путем регулировки уровня помехи и фазового сдвига в компенсационном канале создают одинаковые по интенсивности и противоположные по фазе сигналы помех, которые при суммировании взаимно компенсируются, а сигнал пеленгового направления проходит через сумматор с минимальными искажениями, поскольку для него соотношения амплитуд и фаз, требуемые для подавления, соблюдаться не будут.
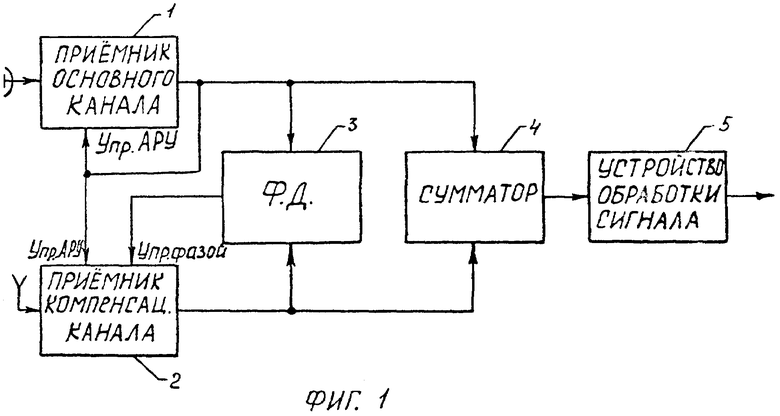
На фиг.1 приведена блок-схема устройства, реализующего этот способ.
Известное устройство содержит основную антенну с приемником 1 основного канала, дополнительную антенну с приемником 2 компенсационного канала, выходы основного и дополнительного приёмников 1 и 2 подключены, соответственно к первому и второму входам фазового детектора 3 и, соответственно, к первому и второму входам сумматора 4, выход которого подключен к устройству 5 обработки сигнала, выход которого является выходом всего устройства. Кроме того, управляющие входы АРУ (автоматической регулировки усиления) основного и дополнительного приемников 1 и 2 объединены и подключены к выходу приемника основного канала, а выход фазового детектора 3 подключен к управляющему фазой входу дополнительного приемника 2.
Устройство работает следующим образом (см. там же с. 232). За счет воздействия помехи с выхода приемника 1 на управляющие входы АРУ на выходах приемников 1 и 2 обеспечивается равенство мгновенных значений колебаний помехи. В то же время фазовый детектор 3 вырабатывает напряжение, зависящее лишь от разности фаз и помехи основного и компенсационного каналов. Под действием этого напряжения фаза помехи компенсационного канала будет изменяться до тех пор, пока напряжение с выхода фазового детектора не приблизиться к нулевому, в котором и будет поддерживаться. Это означает, что будет поддерживаться постоянной и разность фаз помехи на выходе приемников 1 и 2. Это дает возможность обеспечить на входах сумматора 4 противофазность векторов помехи и поддерживать ее. Совместная работа АРУ и фазовой подстройки обеспечивает необходимые фазовые и амплитудные соотношения между векторами помехи, необходимые для их взаимной компенсации в сумматоре 4.
Может быть несколько вариантов реализации автокомпенсаторов по приведенной обобщенной схеме, отличающихся главным образом вариантами регулировки фазы и амплитуды. В качестве фазовращателя может быть использован, например, ферритовый фазовращатель на СВЧ с плавным изменением фазы. Известно использование изменения частоты гетеродина приемника компенсационного канала для изменения фазы помехи этого канала (там же, с. 232).
Наибольшее распространение получили автокомпенсаторы на промежуточной частоте с применением квадратурных преобразователей (там же с. 221). Но для любого варианта реализации существо операций способа остаются неизменным.
Недостатком способа автокомпенсации и устройства, его реализующего, является то, что они эффективны при действии шумовой помехи или протяженных импульсных и не работают по импульсным помехам, имеющим длительность, сравнимую с длительностью рабочего сигнала из-за малого быстродействия автоматических регулировок. Увеличивать их быстродействие нельзя, т.к. при этом будут подавляться рабочие сигналы. Кроме того, для подавления n источников помех требуется n каналов компенсации.
Целью предлагаемого изобретения является повышение помехозащищенности РЛС в отношении импульсных помех, действующих по боковым лепесткам ДНА.
Поставленная цель достигается тем, что в способе, основанном на приеме основного и компенсационного сигналов, изменении фазы и амплитуды компенсационного сигнала, согласно изобретению, при возрастании уровня ложной тревоги за счет воздействия импульсных помех осуществляют модуляцию фазы компенсационного сигнала, при этом изменяют его уровень, начиная с минимального значения, а затем усиливают его до значения, обеспечивающего снижение уровня ложных тревог до заданного уровня.
Т.е. цель достигается путем искажения параметров сигналов, принимаемых с боковых направлений, а не путем точной компенсации помехи основного канала. При этом если модуляцию осуществлять колебанием с периодом существенно меньшим, чем длительность импульса, то будет происходить его декорреляция со всех направлений кроме сигнала главного направления, который практически не будет искажаться в связи с тем, что уровень полезного сигнала, принимаемого компенсационным каналом, будет на уровне боковых лепестков ДН основной антенны.
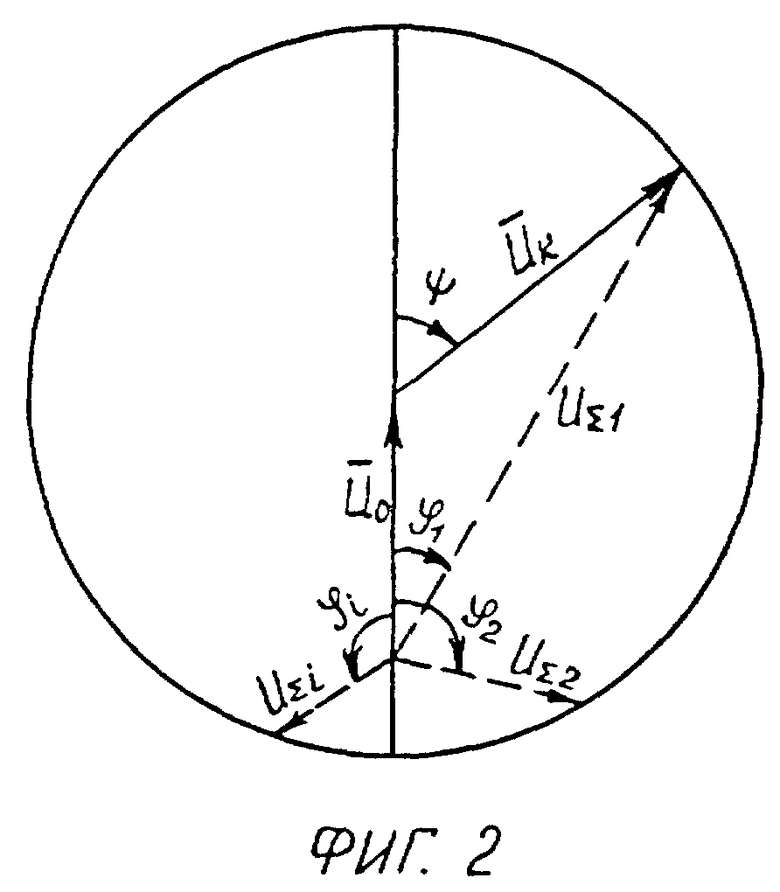
Суть способа поясняется векторной диаграммой на фиг.2. На диаграмме показано, что вектор помехи основного канала  суммируется с вектором помехи компенсационного канала
суммируется с вектором помехи компенсационного канала  , модулированного по фазе колебанием, Ψ(t):
, модулированного по фазе колебанием, Ψ(t):

При этом суммарный вектор помехи будет иметь вид:

где



Если обеспечить

где Ω - частота модулирующего колебания, то из (5) видно, что:

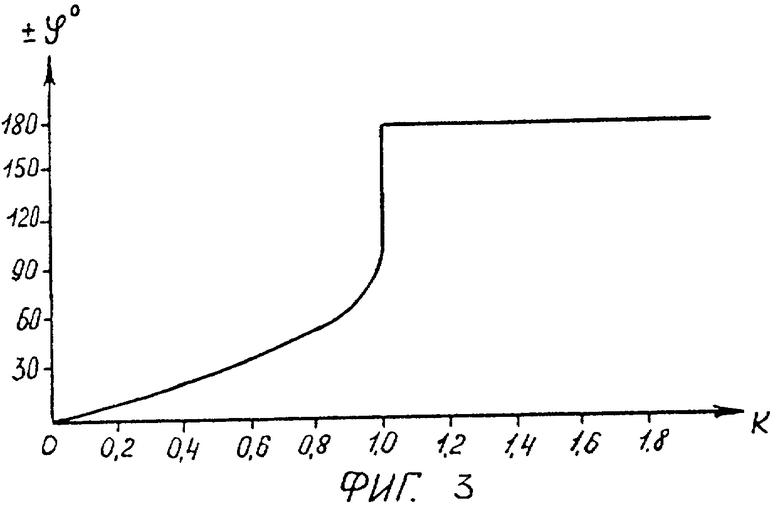
Эта зависимость иллюстрируется графиком на фиг.3.
Таким образом, импульс сигнала, принимаемого с бокового направления путем выбора соответствующего значения К>1 может быть полностью декоррелирован (фаза сигнала согласно (8) под действием модулирующего напряжения за время действия импульса будет отклоняться от эталонного значения в пределах 0-±180°) и при дальнейшей обработке будет подавлен, в то же время сигнал главного направления пройдет без практического искажения (так как для сигнала главного направления К≪1 и согласно (9) фаза сигнала не изменится).
Поставленная цель достигается также тем, что в устройстве для подавления сигналов в области боковых лепестков антенны РЛС, содержащее основную антенну, связанную с приемником основного канала, дополнительную антенну, связанную с приемником компенсационного канала, последовательно соединенные сумматор и устройство обработки сигнала, выход которого является выходом всего устройства, а выходы приемников основного и компенсационного каналов подключены, соответственно, к первому и второму входам сумматора, согласно изобретению введен модулятор, выход которого подключен к управляющему фазой входу приемника компенсационного канала, управляющий АРУ, вход которого соединен с выходом всего устройства.
Именно введение нового блока - модулятора в указанной последовательности обеспечивает согласно способу декорреляцию сигналов, принимаемых в области боковых лепестков ДН антенны, т.е. достижение цели изобретения. Это позволяет сделать вывод, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сравнение заявляемых технических решений с прототипом позволило установить соответствие их критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемые изобретения от прототипа, не были выявлены и поэтому они обеспечивают заявляемому техническому решению соответствие критерию "существенные отличия".
На фиг.1 представлена блок-схема известного устройства подавления сигналов в области боковых лепестков; на фиг.2, 3 - векторная диаграмма, поясняющая предлагаемый способ; на фиг.4 - блок-схема предлагаемого устройства подавления сигналов в области боковых лепестков антенны РЛС; на фиг.5 - блок-схема устройства 5 обработки сигналов; на фиг.6а, б, в - варианты соединения модулятора с возможными вариантами выполнения приемника компенсационного канала; а на фиг.7. - блок-схема этого же соединения с вариантом приемника, выполненная с использованием двух квадратур, на основе наиболее часто встречающемся на практике приемника компенсационного канала, на фиг.8 - диаграмма, поясняющая операцию модуляции фазы сигнала компенсационного канала в приемнике на фиг.7 с двумя квадратурами.
Устройство подавления сигналов в области боковых лепестков антенны РЛС содержит основную антенну, связанную с приемником 1 основного канала, дополнительную антенну, связанную с приемником 2 компенсационного канала, последовательно соединенные сумматор 4 и устройство 5 обработки сигнала, выход которого является выходом всего устройства, а выходы приемников 1 и 2 подключены соответственно, к первому и второму входам сумматора 4, а также модулятор 6, выход которого подключен к управляющему фазой входу приемника 2, управляющий АРУ, вход которого подключен к выходу устройства 5 обработки сигнала.
Устройство работает следующим образом. При отсутствии имитационной помехи частота появления сигналов на выходе устройства обработки 5 находится ниже допустимого уровня, при этом на входе УПР АРУ приемника 2 компенсационного канала управляющее напряжение отсутствует и его усиление минимально (приемник может быть закрыт), что исключает влияние собственных шумов приемника 2 и сигналов, принимаемых дополнительной антенной, на условия приема сигналов приемника 1 основного канала. Никакого влияния на эти же условия не будет оказывать и модулятор 6. Сигнал основного канала (см. фиг.2)  будет проходить через сумматор 4 без искажения фазы, поскольку
будет проходить через сумматор 4 без искажения фазы, поскольку  и в соответствии с (5) Y(t)=0 (см. также график на фиг.3).
и в соответствии с (5) Y(t)=0 (см. также график на фиг.3).
При появлении имитационной помехи с частотой следования, значительно превышающей допустимую частоту приема отраженных сигналов, на выходе устройства 5 обработки сигналов частота появления сигнала превысит пороговый уровень и на входе УПР АРУ приемника 2 возникнет управляющее напряжение, которое будет увеличивать его усиление. В этом случае будет возрастать Umk и К (см. (4)-(6)), что приведет к появлению модуляции фазы суммарного сигнала на выходе сумматора 4. Причем, максимальное отклонение фазы от номинального значения будет расти с ростом усиления приемника 2 (см. график на фиг.3).
С ростом фазовых искажений суммарного сигнала будет расти степень его подавления в устройстве 5 обработки сигнала. Процесс будет нарастать до тех пор, пока степень подавления искаженных сигналов не достигнет величины, при которой они окажутся ниже порога принятия решения в устройстве 5 и частота появления сигналов на его выходе не снизится до порогового значения. Описанный процесс полностью аналогичен работе АРУ, например, по шумам (Защита от радиопомех. Максимов М.В. и др. М.: Сов. радио, 1976, с. 197).
В приведенной на фиг.4 блок-схеме используются известные устройства РЛС.
К приемнику 1 основного канала не предъявляется никаких дополнительных требований, связанных с применением предлагаемого способа, и выбор его типа определяется видом сигнала РЛС и общими требованиями к РЛС.
Сумматор 4 - это широко применяемое устройство, входящее в состав любого автокомпенсатора. Применение предлагаемого способа никаких дополнительных требований к сумматору не предъявляет (может быть выполнен как общая нагрузка двух приемников 1 и 2).
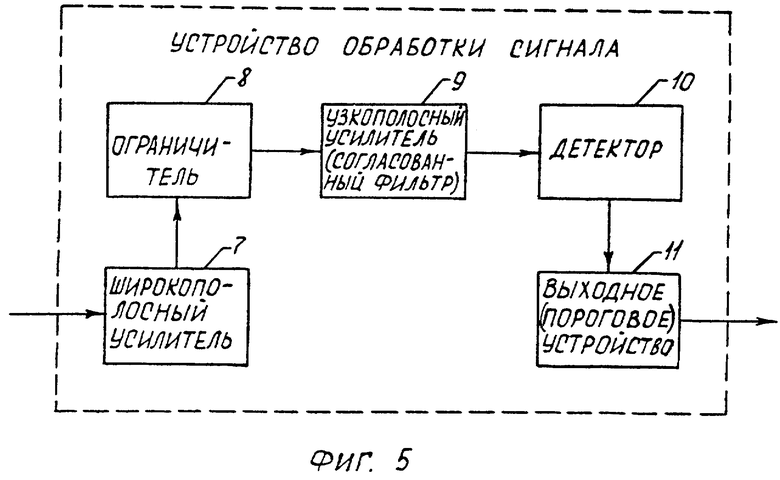
К устройству 5 обработки сигналов предъявляется требование подавления сигнала с искаженной структурой. В радиолокации эта задача решается как задача подавления нестационарных помех. Наиболее распространенным способом этого подавления является применение схемы ШОУ (широкополосный усилитель-ограничитель-узкополосный усилитель). Приемник со схемой ШОУ широко известен (там же с. 382), но в связи с тем, что отдельные элементы приемника зависят от типа сигнала, его функциональная схема приведена на фиг.5. Он содержит последовательно соединенные широкополосный усилитель 7, вход которого является входом устройства 5 обработки сигнала, ограничитель 8, узкополосный усилитель 9, детектор 10 и пороговое устройство 11, выход которого является выходом устройства 5 обработки сигнала. Построение узкополосного усилителя - согласованного фильтра 9 зависит от конкретного типа сигнала РЛС. Предлагаемый способ наиболее эффективен для сигнала со сжатием или для пачки когерентных импульсов, при этом, если используется, например, фазокодированный сигнал или пачка когерентных импульсов, то согласованный фильтр строится по схеме, приведенной, например, в разделе 8.5 Справочника по радиолокации под ред. М.Сколника т. 3, изд. "Сов. радио", М.: 1979; при использовании ЛЧМ - см. раздел 8.3 там же. Широкополосный усилитель 7, ограничитель 8, детектор 10, пороговое устройство 11 универсальны и от конкретной структуры сигнала не зависят.
В качестве модулятора 6 может быть использован любой генератор гармонических колебаний или генератор видеоимпульсов. В приведенном ниже анализе предусматривается применение генератора гармонических колебаний.
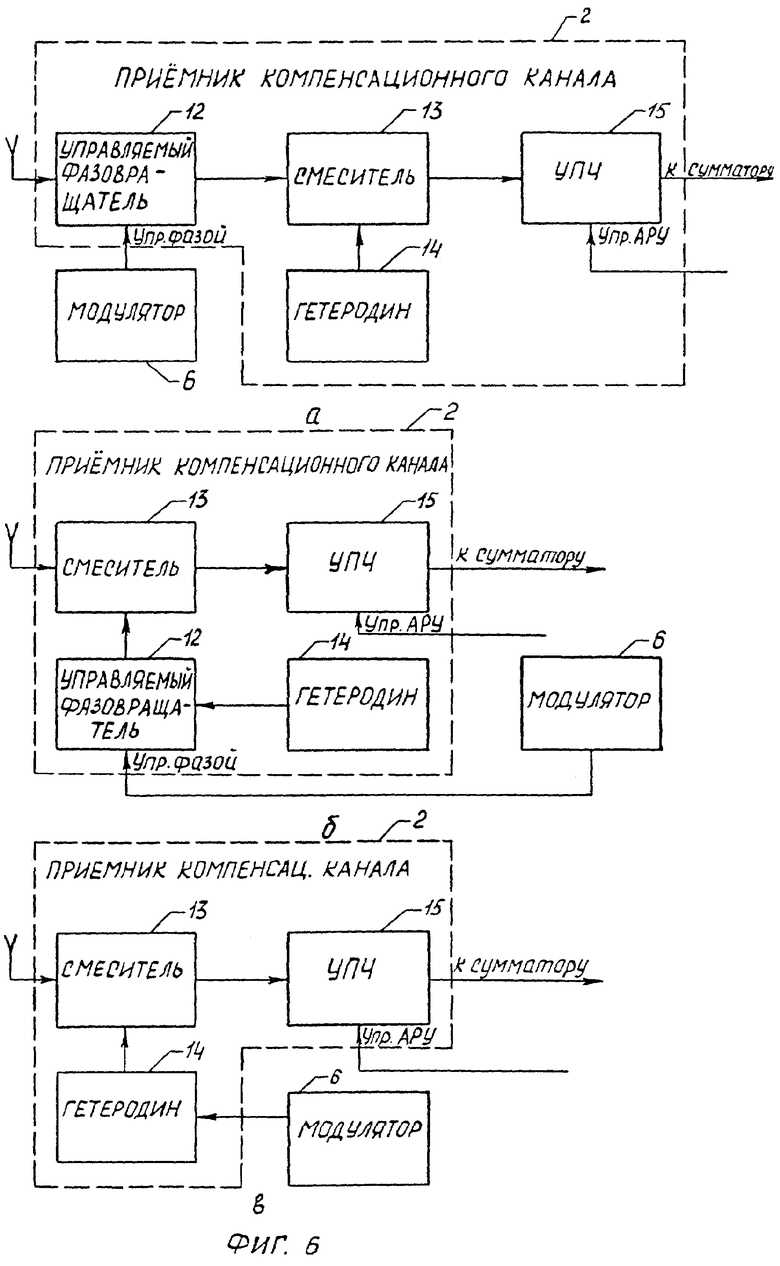
Хотя к приемнику 2 компенсационного канала применение предлагаемого способа существенных дополнительных требований не предъявляет по сравнению с требованиями автокомпенсатора, однако в зависимости от типа приемника 2 компенсационного канала, используемого в РЛС, будут изменяться принципы управления фазовым сдвигом колебанием модулятора. Поскольку реализацию предлагаемого способа целесообразно выполнять на основе существующего в РЛС автокомпенсатора, как дополнение к нему, то целесообразно рассмотреть типовые варианты автокомпенсаторов.
Существует два наиболее распространенных варианта приемников 2 компенсационного канала: с раздельным управлением усилением и фазовым сдвигом этого канала и совмещенным.
Наиболее простой схемой взаимодействия узлов предлагаемого устройства с автокомпенсатором получается в вариантах при раздельном управлении. В этом случае колебание модулятора непосредственно подается на вход узла, изменяющего фазу компенсационного канала. Так, при использовании фазовращателя (например, ферритового) в СВЧ тракте блок-схема соединения узлов приемника 2 и модулятора 6 приведена на фиг.6а.
В этой схеме принимаемый сигнал с антенны компенсационного канала подается на управляемый фазовращатель 12. Фаза этого сигнала на выходе управляемого фазовращателя 12, сдвиг фазы, в котором изменяется под действием колебания модулятора 6, оказывается промодулированной. Далее частота сигнала в смесителе 13 за счет колебания гетеродина 14 преобразуется в промежуточную частот с сохранением фазовой модуляции. В усилителе промежуточной частоты (УПЧ) 15, усиление которого устанавливается под действием напряжения, подаваемого с выхода устройства 5 на управляющий вход УПЧ "Упр АРУ", сигнал усиливается. В приведенной на фиг.6а блок-схеме блоки 12, 13, 14, 15 образуют приемник компенсационного канала 2 на фиг.4.
Разновидностью варианта схемы на фиг.6а может быть вариант с включением фазовращателя в цепь между гетеродином 14 и смесителем 13.
Блок-схема такого соединения приведена на фиг.6б. Отличие этой схемы от схемы на фиг.6а состоит в том, что управляемый фазовращатель 12 включен в цепь гетеродина 14, благодаря чему модулируется фаза гетеродина, что вызывает модуляцию фазы сигнала на промежуточной частоте на выходе смесителя 13.
Кроме того, возможно управление фазой компенсационного канала путем изменения частоты гетеродина (там же, с.232). В этом случае в блок-схеме на фиг.6 будет исключен управляемый фазовращатель 12, а выход модулятора 6 будет соединен с управляющим частотой входом гетеродина 14.
Блок-схема этого соединения приведена на фиг.6в. Изменение частоты гетеродина приводит к изменению фазы сигнала на промежуточной частоте точно так же, как это осуществляется в автокомпенсаторе (см. ссылку выше).
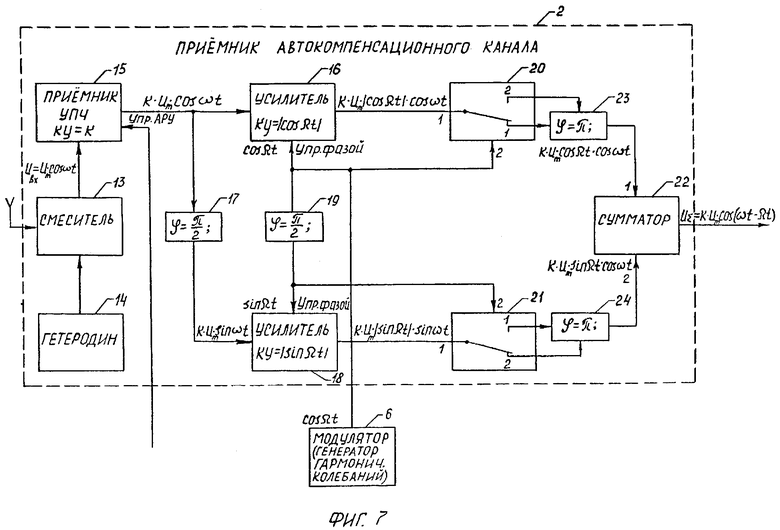
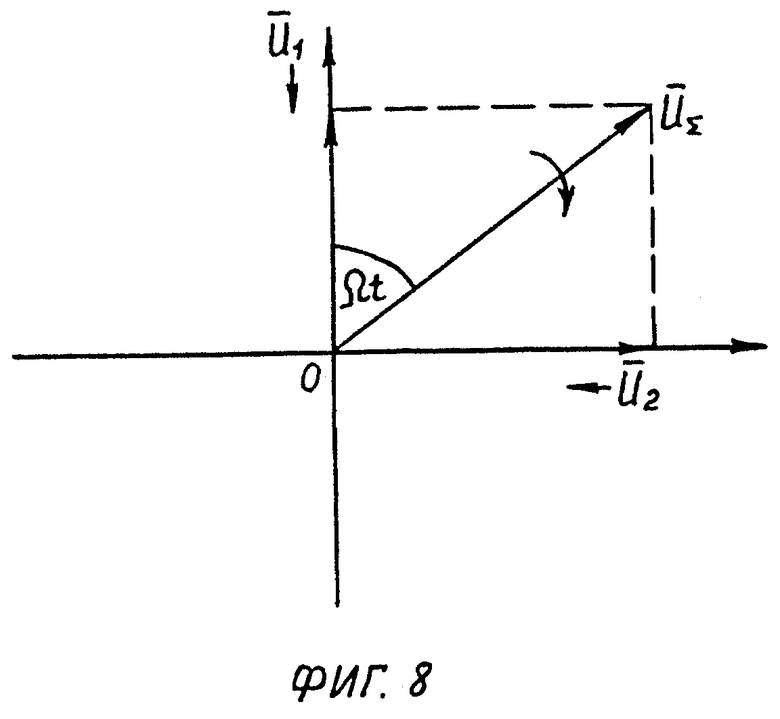
Примером второго варианта приемника 2 с совмещенным управлением усилением и фазой компенсационного канала является вариант с квадратурными преобразователями (там же с.221). В этом варианте плавное изменение фазы в компенсационном канале получают путем изменения усиления в двух квадратурных каналах с дискретным переключением фазы в фазовращателях с двумя состояниями 0 или π. Эти операции иллюстрируются на фиг.8.
Если амплитуду векторов  модулировать колебаниями соответственно cos Ωt и sin Ωt, то фаза суммарного вектора будет модулирована частотой Ω:
модулировать колебаниями соответственно cos Ωt и sin Ωt, то фаза суммарного вектора будет модулирована частотой Ω:

Блок-схема приемника 2 компенсационного канала, выполняющего операцию, описываемую выражением (10) приведена на фиг.7.
Приемник работает следующим образом. Принимаемое колебание с выхода УПЧ 15, имеющего регулируемый коэффициент усиления (КУ), равным К, поступает на вход усилителя 16 и через фазовращатель 17, имеющий сдвиг  на усилитель 18. Так образуют два квадратурных вектора колебаний (см. фиг.8) на входе усилителей 16 и 18
на усилитель 18. Так образуют два квадратурных вектора колебаний (см. фиг.8) на входе усилителей 16 и 18

Коэффициент усиления усилителей 16 и 18 изменяется пропорционально напряжению, подаваемому с модулятора 6 (причем, при использовании в цепях управления усилителей двухполупериодного выпрямления колебания модулятора), т.е. с учетом фазового сдвига в фазовращателе 19.

Электронные коммутаторы 20 и 21 при положительной полуволне колебания модулятора занимают одно из двух положений (например, замыкают вход 1 с выходом 1), а при отрицательной - другое; это обеспечивает получение колебаний на первом и втором входах сумматора 22 колебаний вида
кUmcos Ωt·cosωt и кUmsin Ωt·sinωt
За счет сложения их в сумматоре 22 на входе его будет получено колебание вида (10).
Устройства, применяемые в блок-схеме на фиг.7 общеизвестны. В качестве фиксированных фазовращателей 17, 19, 23, 24 могут быть взяты линии задержки со временем задержки tз:
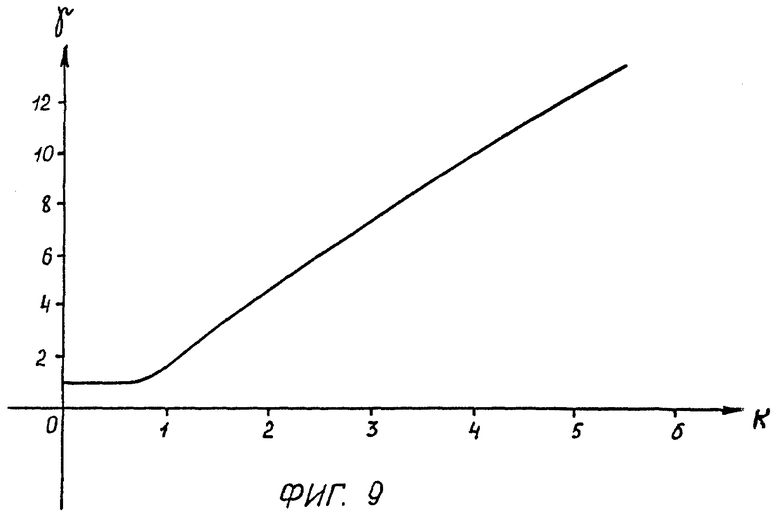
где y - требуемый фазовый сдвиг, fc - частота сигнала. Используя выражения (1)-(6), оценим величину γ подавления сигнала бокового направления (т.е. с искаженной фазой) по отношению к сигналу главного направления на выходе согласованного фильтра 9 (фиг.5) как отношение двух корреляционных интегралов (с учетом нормирования амплитуды колебаний в ограничителе 8)
Можно показать, что при
На фиг.9 приведен график зависимости γ=f(к), построенный по выражению (13). Из графика видно, что величина ослабления, практически, линейно (при К>1) зависит от величины К (соотношение сигнала приемника 2 компенсационного канала к сигналу приемника 1 основного канала).
При этом следует отметить, что γ - величина ослабления сигнала бокового направления относительно нормированного в ограничителе 8 уровня. Из этого следует, что для того, чтобы полностью подавить сигнал бокового направления требуется максимальный уровень ослабления несколько больший, чем отношение нормированного уровня сигнала на выходе детектора 10 к уровню порога порогового устройства 11 и не зависит от максимального входного уровня помехи.
Таким образом, анализ эффективности предлагаемого способа и устройства показывает, что сигнал бокового направления ослабляется относительно нормированного в ограничителе сигнала в число раз, определяемого отношением уровня сигнала компенсационного канала к уровню основного, что дает возможность за счет автоматической регулировки этого отношения устанавливать его таким, что сигнал бокового направления будет ниже порога срабатывания устройства 11. Этим и достигается полное подавление сигналов бокового направления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕЛЯЦИОННЫЙ АВТОКОМПЕНСАТОР ПОМЕХ | 1984 |
|
SU1841059A1 |
| ПРИЕМО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО РАДИОЛОКАТОРА | 1985 |
|
SU1841065A1 |
| РАДИОЛОКАТОР | 1984 |
|
SU1841061A1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ АКТИВНЫХ ПОМЕХ | 1986 |
|
SU1840938A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1991 |
|
RU2237263C2 |
| РАДИОЛОКАЦИОННОЕ ПРИЕМНОЕ УСТРОЙСТВО | 1984 |
|
SU1841013A1 |
| МНОГОКАНАЛЬНЫЙ АВТОКОМПЕНСАТОР | 1984 |
|
SU1841060A1 |
| ПОМЕХОЗАЩИЩЕННОЕ ПРИЕМНОЕ УСТРОЙСТВО РЛС | 1989 |
|
SU1841067A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| СИСТЕМА ЗАЩИТЫ ИМПУЛЬСНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2005 |
|
RU2291459C2 |
Изобретение относится к области радиолокации и может быть использовано для повышения помехозащищенности РЛС в отношении помех, воздействующих по боковым лепесткам антенны. Технический результат заключается в повышении помехозащищенности РЛС в отношении импульсных помех, действующих по боковым лепесткам ДНА. Для этого устройство содержит основную и компенсационную антенны, приемные блоки, сумматор, блок обработки сигналов и модулятор. А в способе перед суммированием основного и компенсационного сигналов дополнительно модулируют по фазе компенсационный сигнал в пределах от 0° до 360° по периодическому закону с периодом, не превышающим длительности импульса помехи, после суммирования осуществляют фильтровую обработку, детектирование и сравнение с порогом. 2 н.п. ф-лы, 2 з.п. ф-лы, 9 ил.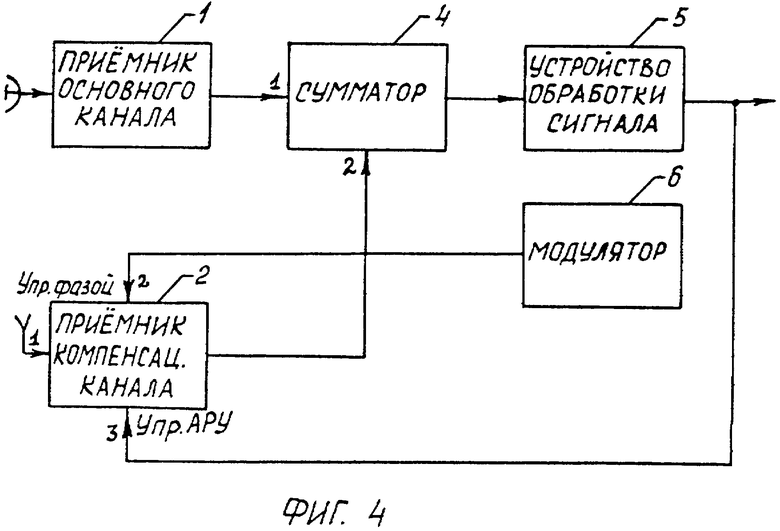
| Защита от радиопомех | |||
| Под ред | |||
| М.В.Максимова, М.: Сов | |||
| радио, 1976, стр.220. |

