[1] Данное техническое решение в общем относится к области вычислительной техники, а в частности к системам и способам осуществления автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства.
УРОВЕНЬ ТЕХНИКИ
[2] В настоящее время под понятием «аутентификация» в информационных системах понимают проверку личных данных объекта (например, человека, компьютера, информационного процесса) с целью авторизации доступа этого объекта к ресурсам (например, услугам, сетям, системам, приложениям).
[3] В уровне техники существуют различные способы обеспечения проверки подлинности пользователя, работающего с мобильным устройством и запрашивающего доступ к нему. Аутентификация может происходить на основании нескольких факторов:
[4] - данные, известные пользователю, например, ввод пароля на мобильном устройстве;
[5] - предмет, которым обладает пользователь, например, магнитная карта или чип-карта, которая прикладывается к мобильному устройству;
[6] - действие, выполняемое только пользователем, например, живая подпись на сенсорном экране;
[7] - физический параметр, присущий пользователю, например, отпечаток пальца.
[8] В настоящее время в основе наиболее широко применяемого способа осуществления аутентификации пользователя на мобильном устройстве лежит применение статического пароля совместно с идентификатором (логин). Преимущество такого способа заключается в том, что его можно осуществлять полностью с помощью программного обеспечения, избегая тем самым дополнительных затрат (аппаратные средства). Однако сетевой шпионаж с целью сбора личных данных законных пользователей является помехой для выполнения этого способа. Личные данные, полученные таким образом, могут использоваться в дальнейшем. Приемы хеширования или шифрования паролей не могут в полной мере решить эту проблему, поскольку они защищают только линии связи, оставляя незащищенным пользовательский терминал (мобильное устройство), в котором теперь нередко можно найти множество вредоносных приложений (хакерские программы).
[9] Методы аутентификации, основанные на средствах, предоставляемых пользователям, таких как маркер аутентификации, чип-карта, смарт-карта или флэш-накопитель, являются нежелательными, так как являются причиной дополнительных затрат на аппаратные средства.
[10] В то же время применяемые в настоящее время биометрические способы аутентификации в основном являются сложными, и для них необходимо выполнение этапа утомительного предварительного определения параметров.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[11] Данное техническое решение направлено на устранение недостатков, присущих существующим решениям, известным из уровня техники.
[12] Технической проблемой (другими словами технической задачей) в данном техническом решении является осуществление аутентификации пользователя на основании его подписи, осуществляемой движением мобильного устройства, находящегося в руке пользователя.
[13] Техническим результатом, проявляющимся при решении вышеуказанной технической проблемы, является упрощение аутентификации пользователя мобильного устройства.
[14] Также дополнительным техническим результатом по отношению к уровню техники является повышение точности аутентификации пользователя мобильного устройства за счет сравнения ускорений движения мобильного устройства.
[15] Указанный технический результат достигается благодаря осуществлению способа автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства, в котором получают первый набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством акселерометра мобильного устройства в форме цифрового сигнала; осуществляют обработку цифрового сигнала для первого набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге; получают второй набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством акселерометра мобильного устройства в форме цифрового сигнала; осуществляют обработку цифрового сигнала для второго набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге; определяют величину расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства; сравнивают определенную на предыдущем шаге величину расстояния с заранее заданным значением, причем если расстояние меньше данного значения, идентифицируют пользователя и разрешают доступ к ресурсу; а если расстояние больше данного значения, не идентифицируют пользователя и не разрешают доступ к ресурсу.
[16] В некоторых вариантах осуществления технического решения при получении первого набора значений ускорений движения мобильного устройства акселерометр преобразует его в электрический цифровой сигнал, который кондиционируется.
[17] В некоторых вариантах осуществления технического решения дополнительно с акселерометром используется гироскоп.
[18] В некоторых вариантах осуществления технического решения осуществляют обработку цифрового сигнала для первого набора значений ускорений движения мобильного устройства посредством сглаживания и фильтрации.
[19] В некоторых вариантах осуществления технического решения при сглаживании сигнала используют фильтр нижних частот и/или фильтр Калмана.
[20] В некоторых вариантах осуществления технического решения определяют величину расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства посредством использования евклидовой метрики.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[21] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей, на которых:
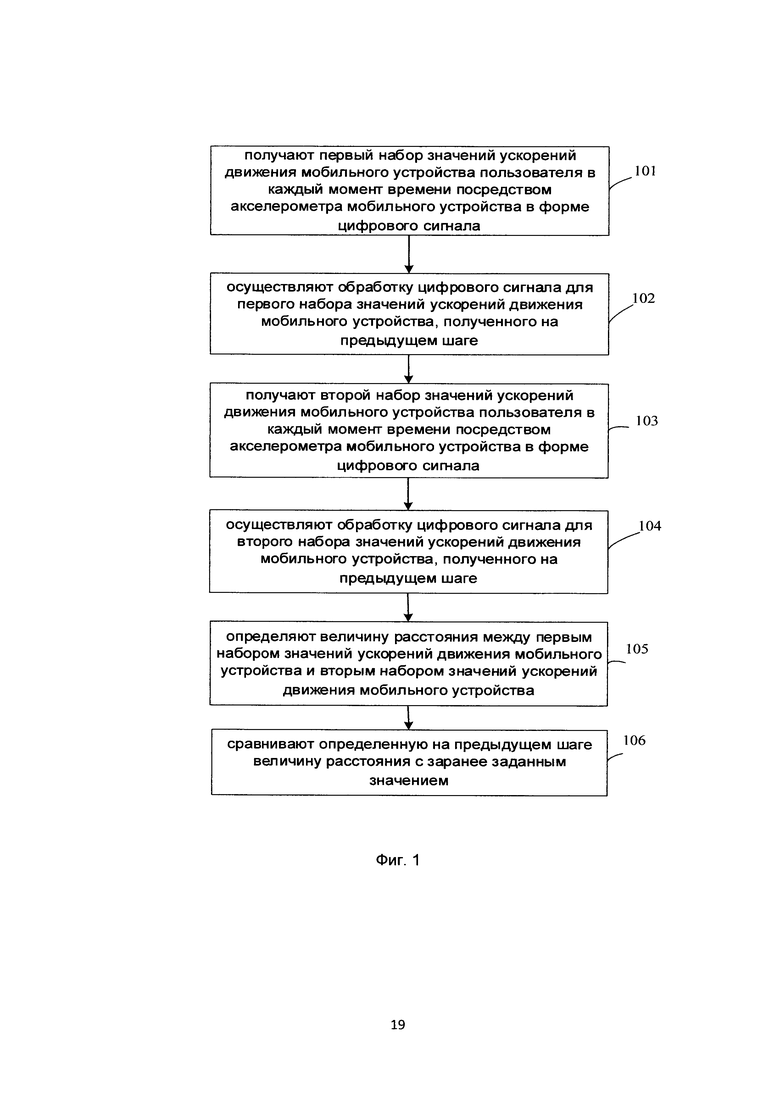
[22] На Фиг. 1 показан пример осуществления варианта технического решения согласно способу автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства;
[23] На Фиг. 2 показан кондиционированный входной сигнал АЦП, где выборки представлены красными точками;
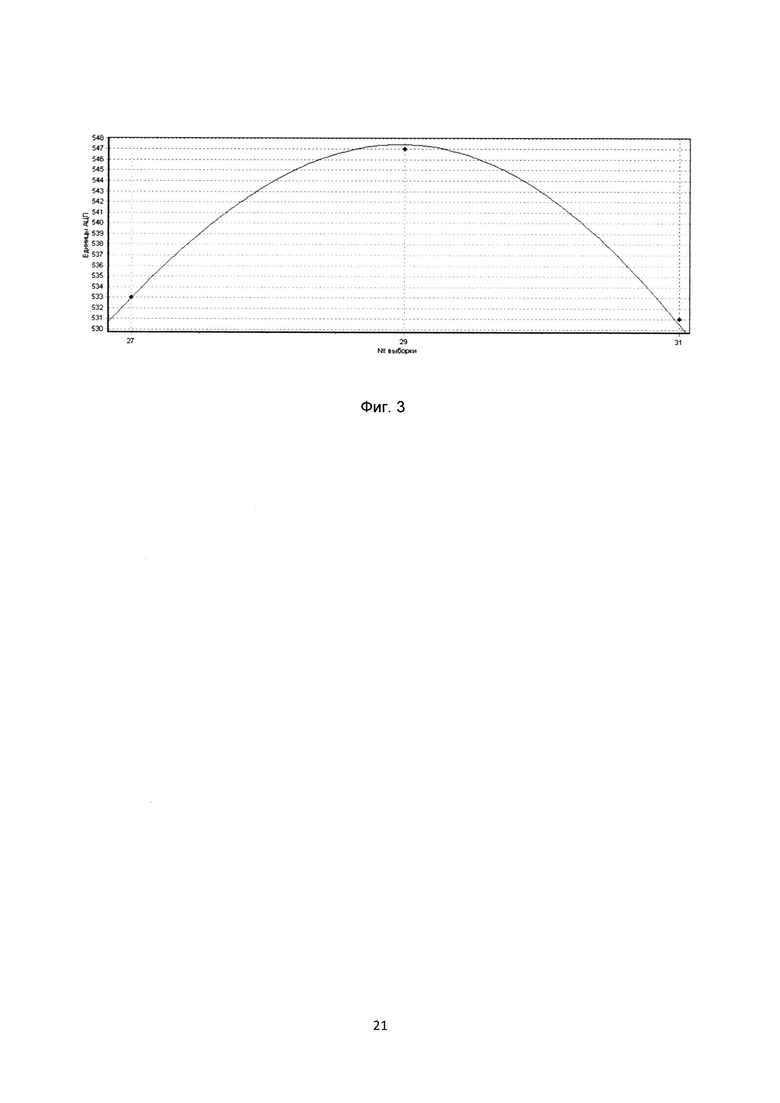
[24] На Фиг. 3 показан увеличенный масштаб кондиционированного входного сигнала АЦП, показанного на Фиг. 2, где выборки представлены красными точками;
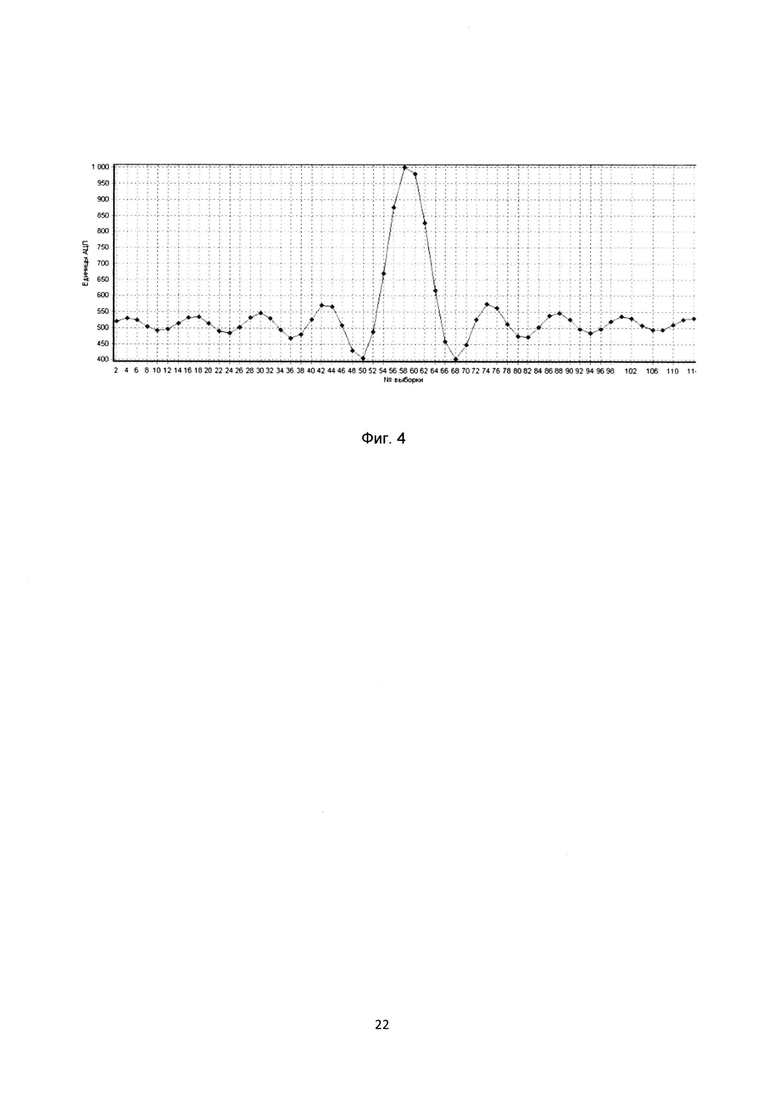
[25] На Фиг. 4 показано восстановление сигнала по выборкам, при котором выборки на графике соединяются прямыми линиями;
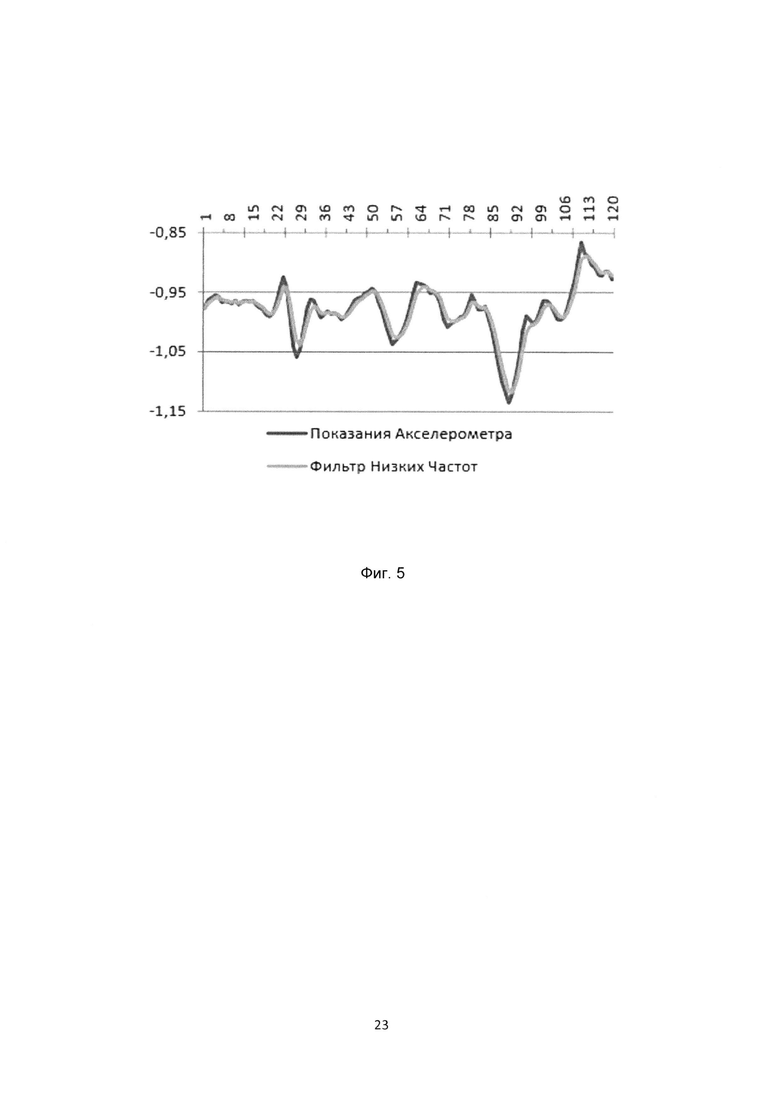
[26] На Фиг. 5 показан пример обработки сигнала посредством фильтра нижних частот;
[27] На Фиг. 6 показано направление осей акселерометра;
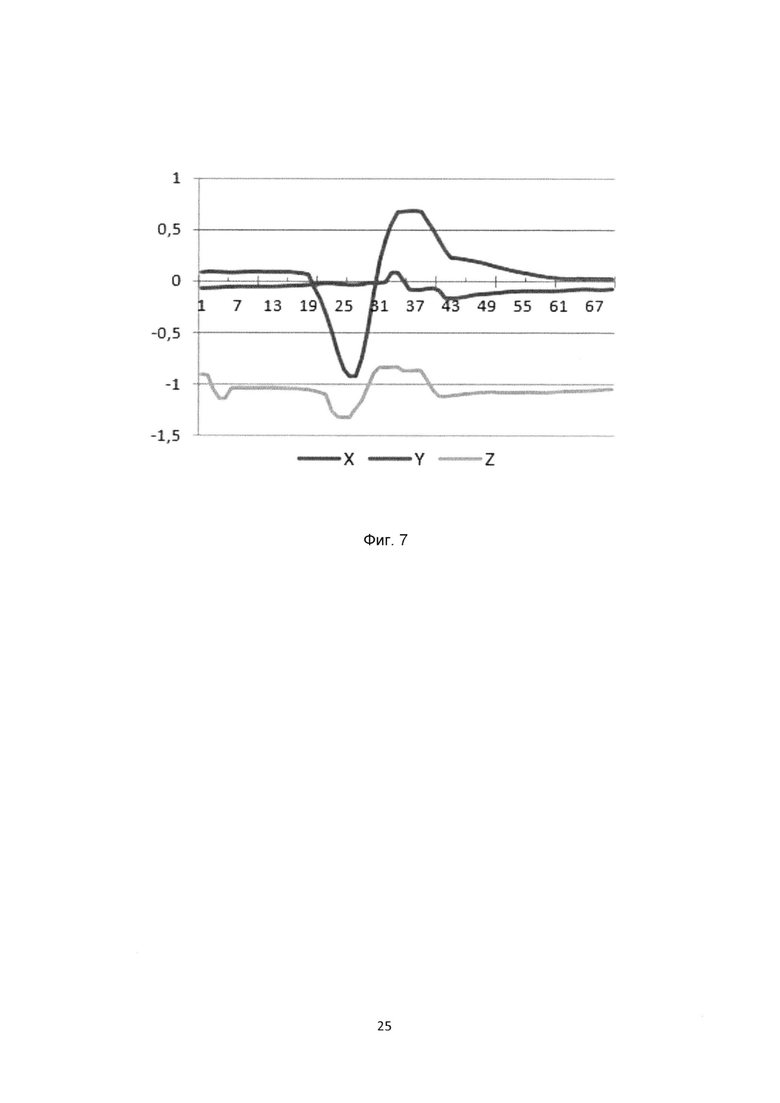
[28] На Фиг. 7 показан график отображения значений ускорений акселерометра при движении мобильного устройства резко по горизонтальной прямой слева направо;
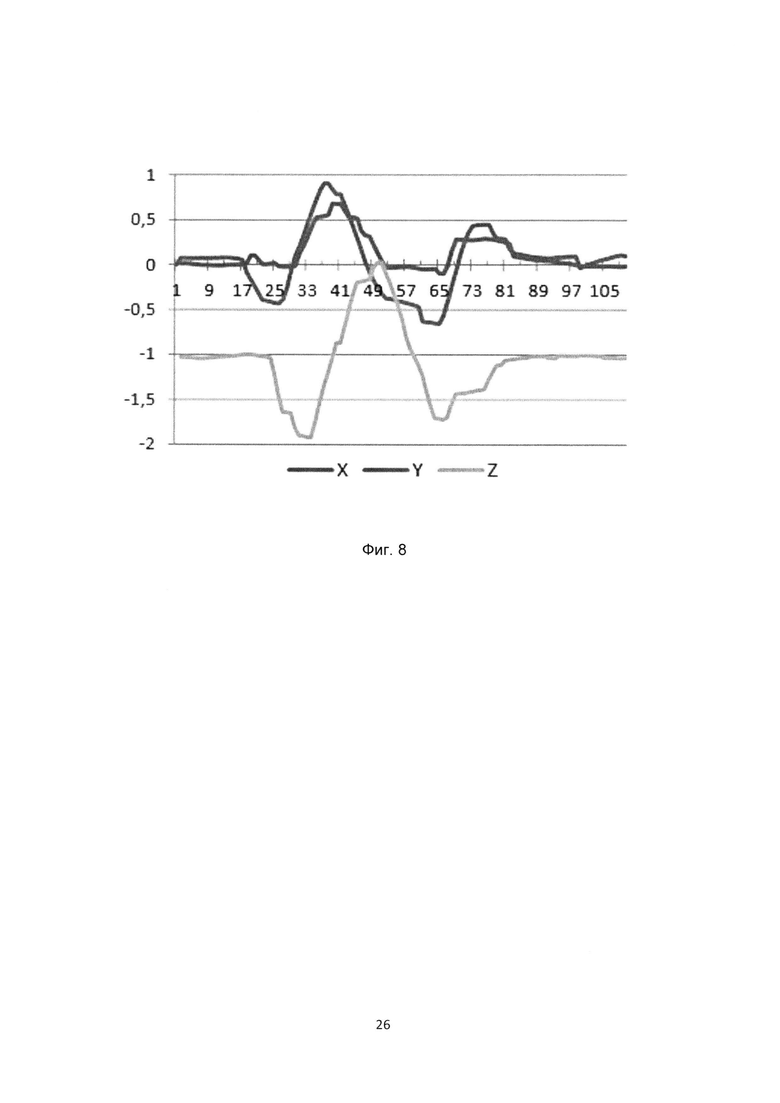
[29] На Фиг. 8 показан график отображения значений ускорений акселерометра при движении мобильного устройства по окружности;
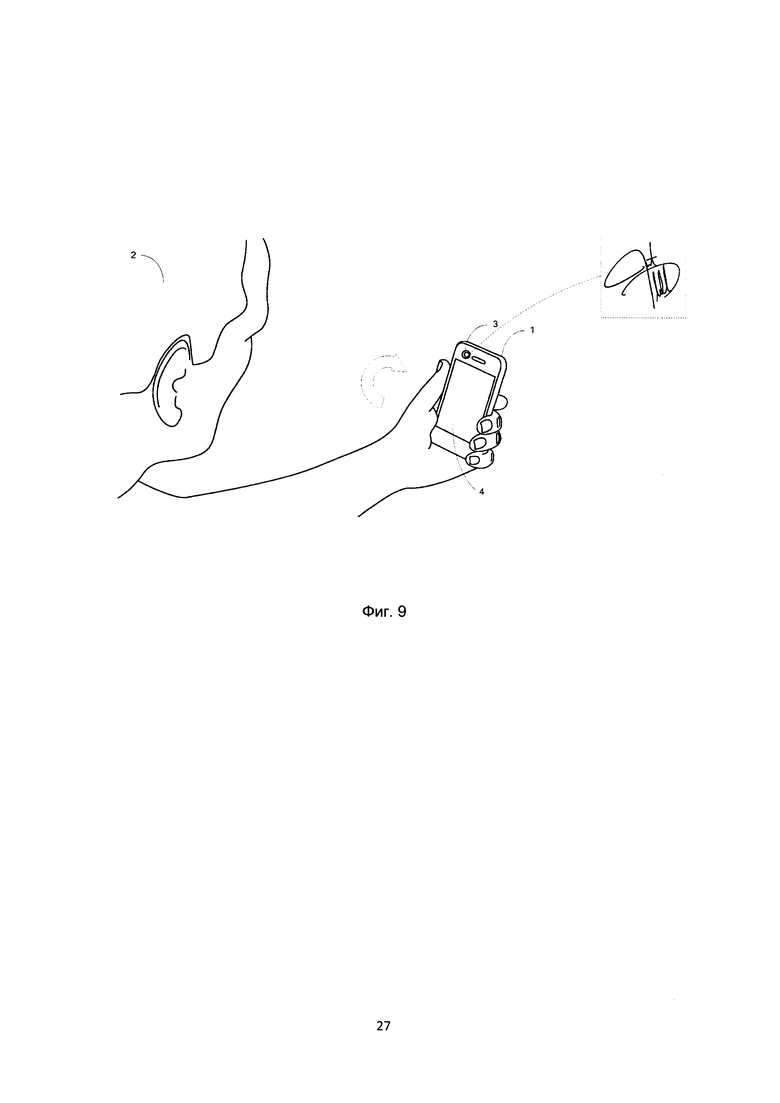
[30] На Фиг. 9 показан пример осуществления технического решения, согласно которому пользователь формирует данный набор значений, посредством написания движением мобильного устройства в воздухе своей подписи;
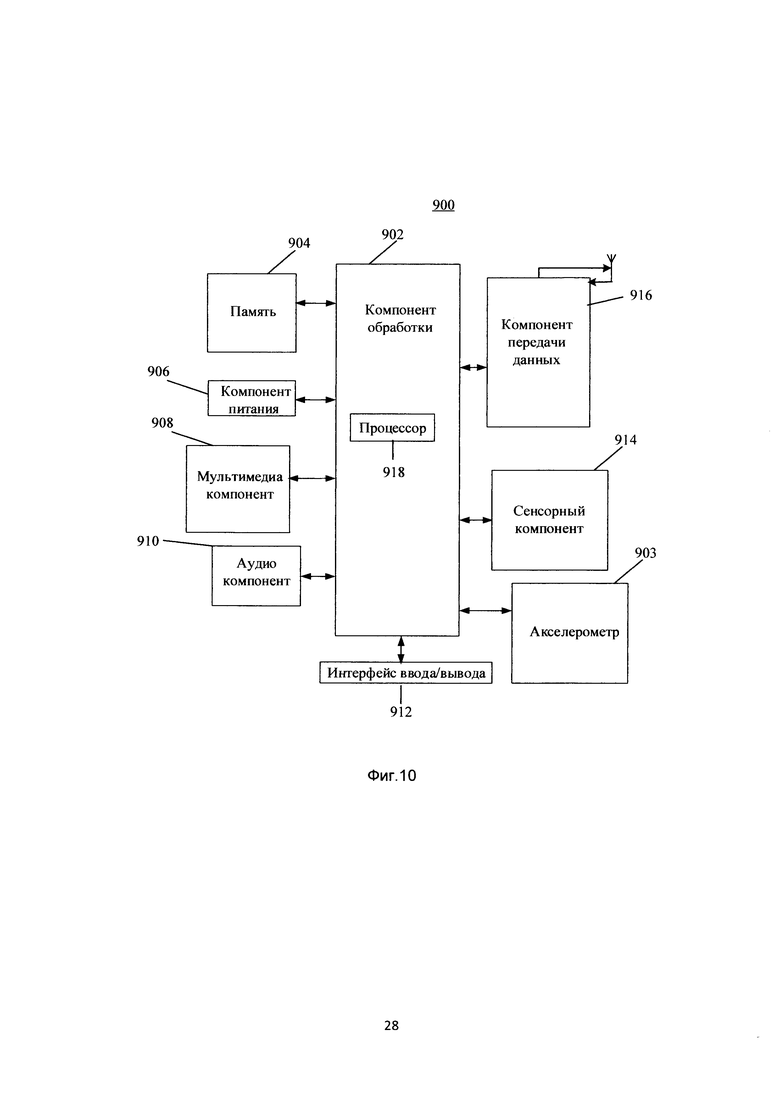
[31] На Фиг. 10 показана система автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[32] Данное техническое решение может быть реализовано на компьютере, в виде системы или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа.
[33] Техническое решение может быть реализовано в виде распределенной компьютерной системы.
[34] В данном решении под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций).
[35] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
[36] Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы.
[37] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[38] Ниже будут описаны термины и понятия, необходимые для осуществления настоящего технического решения.
[39] Аутентификация - средство защиты, устанавливающее подлинность лица, получающего доступ к автоматизированной системе, путем сопоставления сообщенного им идентификатора и предъявленного подтверждающего фактора.
[40] Цифровой сигнал - дискретный сигнал, который дает представление о значении контролируемой величины в цифровом виде.
[41] Акселерометр - измерительное устройство, предназначенное для измерения ускорений.
[42] Расстояние - в данном техническом решении содержание термина «расстояние», как и в математике, связано с понятием метрики и метрического пространства.
[43] Метрика - функция, определяющая расстояния в метрическом пространстве.
[44] Аналого-цифровой преобразователь (АЦП) - устройство для автоматического преобразования аналоговых (непрерывных во времени) сигналов в эквивалентные им дискретные сигналы, представленные цифровым кодом. Аналоговыми величинами чаще всего бывают электрическое напряжение или сила тока, частота колебаний, фазовые сдвиги, углы поворота. Цифровые коды представляются в основном в двоичной, двоично-десятичной или десятичной системах счисления. АЦП широко используются для сопряжения источников аналоговых сигналов (напр., измерит, преобразователей, АВМ) с цифровыми регистраторами и цифровыми вычислит. устройствами (напр., с микропроцессором, ЭВМ).
[45] Цифровой код - последовательность цифр (сигналов), подчиняющаяся определенному закону, с помощью которой осуществляется условное представление числового значения величины.
[46] Обучающая выборка (training sample) - выборка, по которой производится настройка (оптимизация параметров) модели зависимости.
[47] Тестовая (или контрольная) выборка (test sample) - выборка, по которой оценивается качество построенной модели.
[48] Фиг. 1 представляет собой блок-схему, показывающую способ осуществления автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства, который содержит следующие шаги:
[49] Шаг 101: получают первый набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством акселерометра мобильного устройства в форме цифрового сигнала.
[50] На данном шаге получают на мобильном устройстве первый набор значений ускорений движения мобильного устройства, который хранится в памяти 904 (Фиг. 10) мобильного устройства. Данный набор значений формируется на мобильном устройстве посредством написания пользователем движением мобильного устройства в воздухе своей подписи (как показано на Фиг. 9). Для обеспечения необходимой точности рекомендуется выполнять подпись, например, верхним левым углом мобильного устройства. Данный первый набор значений ускорений движения мобильного устройства называют эталонным, который является аналогом пароля. Также вышеуказанный набор значений может являться частью обучающей выборки (training sample) для работы ИНС (искусственной нейронной сети) в дальнейшем при распознавании подписи пользователя. Обучающая выборка - это конечное множество объектов, для которых известна их классовая принадлежность, используемое для обучения (тренировки) нейронной сети. При обучении нейронной сети с учителем элементы обучающей выборки подаются на вход нейронной сети. Выходной вектор подстраивается под некоторый заранее заданный целевой вектор путем изменения весов связей нейронной сети. Обучающая выборка не должна содержать противоречий, так как нейронная сеть однозначно сопоставляет выходные значения входным. В некоторых вариантах осуществления технического решения используется многослойный персептрон, который является нейронной сетью с прямым распространением сигнала (без обратных связей), обучаемой с учителем. Для обучения ИНС могут использоваться не ограничиваясь, метод обратного распространения (Backpropagation) или метод упругого распространения (Resilient propagation или Rprop), или генетический алгоритм (Genetic Algorithm) и т.д.
[51] В некоторых вариантах осуществления чтобы помочь изолировать траекторию движения пользователем, используют кнопку на мобильном устройстве для различения преднамеренного движения жеста и непреднамеренного движения или отклонения. Кнопка может быть нажата во время выполнения подписи, или ее можно нажать один раз в начале жеста и один раз в конце. В другом варианте осуществления скорость траектории может использоваться для определения начала и конца жестов. Например, когда пользователь начинает длинное, быстрое движение, предполагается, что жест начался. Когда проходит некоторое время, и общее количество или скорость движения уменьшаются до уровня ниже некоторого заранее заданного порогового значения, предполагается, что жест завершен. В еще одном варианте осуществления любое движение считается потенциальным движением жеста, а движущееся окно данных используется для захвата жестов.
[52] Поскольку пользователь может быть не знаком с опытом использования движения руки для рисования заданной траектории своей подписи в воздухе, может использоваться обратная связь, чтобы помочь пользователю научиться управлять траекторией. В этом случае изображение (отсканированная подпись пользователя), соответствующее траектории точек X и Y, может отображаться, например, на дисплее мобильного устройства, чтобы уведомить пользователя о траектории, которая будет использоваться в алгоритме распознавания жестов.
[53] Воздействующее ускорение, полученное в виде набора значений (который называют выборка) в каждый момент времени в каждой точке пространства, акселерометр 903 (Фиг. 10) преобразует в электрический цифровой сигнал, который кондиционируется (усиливается или ослабляется, а при необходимости к нему добавляется постоянное смещение) так, чтобы его возможные уровни соответствовали входному диапазону аналого-цифрового преобразователя (АЦП). АЦП периодически осуществляет выборку сигнала, т.е., запоминает текущее значение сигнала и преобразовывает его в пропорциональный этому значению цифровой код. В зависимости от числа разрядов АЦП, код принимает положительные целочисленные значения в диапазоне от 0 до 2N - 1, где N - число разрядов АЦП. Например, для 10-разрядного АЦП код может принимать значения от 0 до 1023, для 12-разрядного - от 0 до 4095. Значения кодов АЦП безразмерны, их также называют единицами АЦП. Выборки выполняются посредством АЦП через одинаковые интервалы времени Т. На Фиг. 2 показан кондиционированный входной сигнал АЦП, выборки представлены красными точками. Набор значений ускорений может поступать параллельно или последовательно примерно в таком виде: 519 535 530... (это выборки №1,2,3...). Если посмотреть в большем масштабе на Фиг. 2 (см. Фиг. 3) видно, что значения сигнала и выборки отличаются: выборка в единицах АЦП - это ближайшее целое число, соответствующее значению выбираемого сигнала. Компонент 902 обработки данных (Фиг. 10) восстанавливает сигнал по выборкам, в простейшем случае выборки на графике соединяются прямыми линиями, а степень искажения графика тем меньше, чем больше число разрядов АЦП и чем выше частота выборки (чем выше эти параметры, тем дороже акселерометр), как показано на Фиг. 4. В некоторых вариантах осуществления технического решения используют линейную интерполяцию, например, сплайнами. В некоторых вариантах осуществления технического решения для интерполяции используют кривые Безье.
[54] В качестве акселерометра 903 (Фиг. 10) в зависимости от архитектуры на данный момент могут использоваться несколько типов устройств, например, на основе MEMS. Основным назначением акселерометра является предоставление информации о текущем ускорении устройства, точнее разности ускорения устройства и ускорения свободного падения. В состоянии покоя показания датчика совпадают с вектором ускорения свободного падения. В некоторых вариантах осуществления работа акселерометра может базироваться на конденсаторном принципе. В такой системе подвижная часть выполнена в виде обычного грузика, смещаемого в зависимости от того, в какую сторону наклонено устройство. По мере его смещения происходит изменение емкости конденсатора, а конкретнее, напряжения. Эти данные позволяют получить смещение грузика, а вместе с ним и искомое ускорение. Именно так и работает акселерометр. Наиболее распространенным типом являются пьезоэлектрические системы. В их основе лежит грузик, воздействующий под давлением на пьезокристалл. В ответ на это он вырабатывает электрический ток, благодаря чему можно рассчитать искомое ускорение, если известны параметры всей системы. В некоторых вариантах осуществления изобретения вместе с акселерометром используется гироскоп. Его основное предназначение заключается в измерении угловых скоростей относительно одной или нескольких осей. Собственно, комбинация акселерометра и гироскопа позволяет отследить и зафиксировать движение в трехмерном пространстве. Направление осей акселерометра показано на Фиг. 6: х, у и z, по которым записываются значения ускорений, которые отображаются на графике. Например, если происходит достаточно резкое движение мобильным устройством по горизонтальной прямой слева направо, график выглядит как показано на Фиг. 7.
На графике ярко выделяются два всплеска по оси X, первый начало движения, второй - конец. Значения на остальных осях существенно не меняются. Аналогично, всплески значений на осях Y и Z образуются при движении в соответствующем направлении. Движение же по окружности, отображенное на Фиг. 8, проводилось против часовой стрелки, начальной точкой движения являлась нижняя точка окружности. Графики изменений значений по осям X и Z практически совпадают, именно по этим осям «рисовалась» окружность. Естественно имеет место фазовый сдвиг, так как горизонтальное изменение началось раньше, чем вертикальное. Рассмотрим подробнее график показаний акселерометра по вертикальной оси Z. График имеет синусоидальный вид, так как начало движения находилось в нижней точке окружности, где sin принимает значение - 1, то ожидается увидеть полную фазу синусоиды от первой нижней точки до второй, что и можно наблюдать на графике. Спад до первой нижней точки и подъем от второй, характеризуют начало движения (разгон) и завершение (торможение). По сути, первый набор значений ускорений мобильного устройства является эталонным.
[55] Специалисту в данной области техники будет понятно, что настоящее изобретение не ограничено устройствами на основе MEMS, а также что описанные здесь варианты осуществления на основе MEMS являются иллюстративными и что настоящее изобретение может быть реализовано с помощью любого акселерометра, компаса и гироскопа, которые могут находится в мобильном устройстве. Специалисту в данной области техники будет понятно, что в настоящем изобретении также могут использоваться другие типы инерциальных датчиков, которые могут быть включены в мобильное устройство, например кварцевые датчики. Другие типы инерционных датчиков, которые включают механические компоненты на микро- или миллиметровой шкале и могут быть объединены с электронной схемой, также могут быть использованы в настоящем изобретении.
[56] Шаг 102: осуществляют обработку цифрового сигнала для первого набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге.
[57] Показания акселерометра на мобильных устройствах подвержены достаточно сильному шуму. Зашумленность порой достигает 0.08g, вследствие этого возникает острая необходимость борьбы с шумом. Ниже будут рассмотрены несколько подходов к сглаживанию и фильтрации данных акселерометра.
[58] В некоторых вариантах осуществления используют метод средних значений, который является одним из самых простых методов фильтрации шума. На каждом шаге k, значение νk вычисляется как среднее из n предыдущих значений акселерометра, то есть  . Такой метод дает при средних значениях n неплохое сглаживание, однако при использовании данного метода может возникнуть большая задержка в значениях, что необходимо учитывать.
. Такой метод дает при средних значениях n неплохое сглаживание, однако при использовании данного метода может возникнуть большая задержка в значениях, что необходимо учитывать.
[59] В некоторых вариантах осуществления технического решения одним из способов борьбы с зашумленными данными является применение фильтра. Задача распознавания движения мобильным устройством накладывает одно существенное требование к фильтру - требование производительности достаточной для того, чтобы использовать фильтр в режиме реального времени с минимальными задержками. Конечно, большим плюсом фильтра является приближенность значений к начальным. В некоторых вариантах осуществления технического решения могут использовать фильтр нижних частот, который обладает способностью фильтровать сигналы выше указанной частоты, то есть фильтр пропускает сигналы низкой частоты, что позволяет избавиться от шумовых помех сигнала, в данном случае показаний акселерометра. Самый простой фильтр низких частот описывается следующей формулой: On=On-1+α(In-On-1), где О -выходное значение сигнала (отфильтрованное), In - входные значения (нефильтрованные), α - коэффициент фильтрации, принимающий значения от 0 до 1. При α равном 1, выходные значения совпадают с входными. Пример работы фильтра нижних частот показан на Фиг. 5. При обработке результат получается более гладким.
[60] В некоторых вариантах осуществления используется фильтр Калмана. Фильтр Калмана часто используется для фильтрации значений различного рода сигналов, его можно встретить в GPS - приемниках, обработчиках показаний датчиков и т.д. Фильтр Калмана является разновидностью рекурсивных фильтров. Для вычисления оценки состояния системы на текущий шаг работы ему необходима оценка состояния (в виде оценки состояния системы и оценки погрешности определения этого состояния) на предыдущем шаге работы и измерения на текущем шаге. Итерации фильтра Калмана делятся на две фазы: экстраполяция и коррекция. Во время экстраполяции фильтр получает предварительную оценку состояния системы на текущий шаг по итоговой оценке состояния с предыдущего шага. Эту предварительную оценку также называют априорной оценкой состояния, так как для ее получения не используются наблюдения соответствующего шага. В фазе коррекции априорная экстраполяция дополняется соответствующими текущими измерениями для коррекции оценки. Скорректированная оценка также называется апостериорной оценкой состояния, либо оценкой вектора состояния
на текущий шаг по итоговой оценке состояния с предыдущего шага. Эту предварительную оценку также называют априорной оценкой состояния, так как для ее получения не используются наблюдения соответствующего шага. В фазе коррекции априорная экстраполяция дополняется соответствующими текущими измерениями для коррекции оценки. Скорректированная оценка также называется апостериорной оценкой состояния, либо оценкой вектора состояния  . Обычно эти две фазы чередуются: экстраполяция производится по результатам коррекции до следующего наблюдения, а коррекция производится совместно с доступными на следующем шаге наблюдениями, и т.д.
. Обычно эти две фазы чередуются: экстраполяция производится по результатам коррекции до следующего наблюдения, а коррекция производится совместно с доступными на следующем шаге наблюдениями, и т.д.
[61] Дополнительная фильтрация для очистки сигнала может устранить непроизвольное дрожание руки и другие нежелательные высокочастотные компоненты. Джиттер - это маленькая и быстрая вибрация, присущая человеческой руке.
[62] Шаг 103: получают второй набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством акселерометра мобильного устройства в форме цифрового сигнала.
[63] На данном шаге получают на мобильном устройстве пользователя второй набор значений ускорений движения мобильного устройства пользователя в каждый момент времени на устройство обработки данных, который хранится в памяти 904 (Фиг. 10) мобильного устройства, когда пользователь осуществляет уже непосредственно аутентификацию в мобильном устройстве с помощью выполнения в воздухе подписи (как показано на Фиг. 9).
[64] В некоторых вариантах осуществления технического решения второй набор значений ускорений движения мобильного устройства используют либо как часть обучающей выборки для обучения ИНС, либо уже как тестовую выборку для проверки работы технического решения, т.е. для задачи классификации подписи пользователя.
[65] Шаг 104: осуществляют обработку цифрового сигнала для второго набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге.
[66] На данном шаге аналогично показанному выше осуществляется сглаживание и фильтрация данных акселерометра. Аналогично могут использоваться алгоритмы обработки, известные из уровня техники любому специалисту, применение которых также очевидно.
[67] Имея на компоненте 902 обработки данных два набора значений ускорений движения мобильного устройства, полученных ранее, необходимо и сравнить, осуществляя перед этим дополнительную предобработку. Для корректности сравнения сначала устанавливают одинаковую длительность выполнения пользователем подписи в воздухе посредством растягивания или сужения графика, получая одинаковую длину. Фактически на данном этапе устанавливают одинаковый размер наборов значений ускорений движения мобильного устройства, так как некорректно сравнивать, например, подпись, которая длится 5 секунд и 10 секунд. Также необходимо учитывать, что акселерометр имеет некоторую задержку в определении значений ускорений, которая может быть очень значимой, в связи с чем устанавливают для наборов значений ускорений одинаковые совпадающие моменты времени посредством осуществления интерполяции значений ускорений. Также может возникнуть проблема, при которой пользователь первый раз формирует подпись посредством движения в воздухе медленно, а во второй раз и последующий с другой скоростью, например, интенсивнее. Для устранения данной проблемы сжимают график траектории движения (посредством умножения всех точек двух сравниваемых наборов значений ускорений мобильного устройства), например, до диапазона [0;1], в результате чего два набора значений ускорений движения мобильного устройства имеют одинаковые минимумы и максимумы, и проблема решается.
[68] В некоторых вариантах осуществления используют наивный байесовский классификатор для определения принадлежит ли второй набор значений ускорений движения мобильного устройства к тому же классу, что и первый набор значений ускорений.
[69] Шаг 105: определяют величину расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства.
[70] На данном шаге сравнивают два набора значений ускорений определяя между ними величину расстояния, например, используя Евклидову метрику (или евклидово расстояние)
[71] Для двух наборов значений ускорений движения мобильного устройства α=(α1,...,αn) и b=(b1,...,bn), полученных ранее, евклидово расстояние определяется следующим образом:

[72] В некоторых вариантах осуществления технического решения может применяться метрика Манхэттена, метрика Громова-Хаусдорфа и т.д., не ограничиваясь, что является очевидным для эксперта в уровне технике.
[73] Шаг 106: сравнивают определенную на предыдущем шаге величину расстояния с заранее заданным значением.
[74] После определения величины расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства с использованием метрики, осуществляют сравнение данной величины с заранее заданным значением е (например, пороговым значением).
[75] Если ранее определенное расстояние d меньше данного значения ε, идентифицируют пользователя и разрешают доступ к мобильному устройству или ресурсу, находящемся на мобильном устройстве;
[76] Если ранее определенное расстояние d больше данного значения ε, не идентифицируют пользователя и не разрешают доступ к мобильному устройству или ресурсу, находящемся на мобильном устройстве.
[77] Пользователь или разработчик мобильного устройства могут также настраивать пороговые значения распознавания различными способами. Каждая индивидуальная подпись может содержать независимые пороговые значения и может также содержать конечный вероятностный масштабный коэффициент, который переносит подпись по отношению к другим подписям, позволяя разработчику приложения или пользователю выбирать подпись из двух аналогичных подписей, которые легче запускать.
[78] В некоторых вариантах осуществления, мобильное устройство 900 может быть мобильным телефоном, устройством для обмена сообщениями, планшетом и персональным цифровым помощником и т.д.
[79] Ссылаясь на Фигуру 10, система 900 может включать один или более следующих компонент: компонент 902 обработки данных, акселерометр 903, память 904, компонент 906 питания, компонент 908 мультимедиа, интерфейс 912 ввода/вывода (I/О), сенсорный компонент 914, компонент 916 передачи данных.
[80] В некоторых вариантах, компонент 902 обработки данных в основном управляет всеми операциями мобильного устройства 900, например, дисплеем, передачей данных, работой акселерометра и операцией записи данных. Компонент 902 обработки данных может включать в себя один или более процессоров 918, реализующих инструкции для завершения всех или части шагов из указанных выше способов. Кроме того, компонент 902 обработки данных может включать в себя один или более модулей для удобного процесса взаимодействия между компонентом 902 обработки и другими компонентами. Например, компонент 902 обработки данных может включать в себя мультимедийный модуль для удобного облегченного взаимодействия между компонентом 908 мультимедиа и компонентом 902 обработки.
[81] Память 904 выполнена с возможностью хранения различных типов данных для поддержки работы мобильного устройства 900. Примеры таких данных включают в себя инструкции из любого приложения или способа, изображения, видео, и т.д. Память 904 может быть реализована в виде облачного хранилища данных, любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, Статического Оперативного Запоминающего Устройства (СОЗУ), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (ЭСППЗУ), Стираемого Программируемого Постоянного Запоминающего Устройства (СППЗУ), Программируемого Постоянного Запоминающего Устройства (ППЗУ), Постоянного Запоминающего Устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного или оптического диска.
[82] В некоторых вариантах, компонент 906 питания обеспечивает электричеством различные компоненты мобильного устройства 900. Компонент 906 питания может включать систему управления электропитанием, один или более источник питания, и другие узлы для генерации, управления и распределения электроэнергии к мобильному устройству 900.
[83] В некоторых вариантах, мультимедийный компонент 908 включает в себя экран, обеспечивающий выходной интерфейс между мобильным устройством 900 и пользователем. В некоторых вариантах осуществления, экран может быть жидкокристаллическим дисплеем (ЖКД) или сенсорной панелью (СП). Если экран включает в себя сенсорную панель, экран может быть реализован в виде сенсорного экрана для приема входного сигнала от пользователя. Сенсорная панель включает один или более сенсорных датчиков в смысле жестов, прикосновения и скольжения сенсорной панели. Сенсорный датчик может не только чувствовать прикосновение или жест перелистывания, но и определять длительность времени и давления, связанных с режимом работы прикосновения и скольжения.
[84] Интерфейс 912 ввода/вывода обеспечивает интерфейс между компонентом 902 обработки данных и периферийным интерфейсным модулем.
[85] Сенсорный компонент 914 содержит один или более сенсоров и выполнен с возможностью обеспечения различных аспектов оценки состояния мобильного устройства 900. Например, сенсорный компонент 914 может обнаружить состояния вкл/выкл мобильного устройства 900, относительное расположение компонентов, например, дисплея и кнопочной панели мобильного устройства 900, изменение положения мобильного устройства 900 или одного компонента мобильного устройства 900, наличие или отсутствие контакта между пользователем и мобильного устройства 900, а также ориентацию или ускорение/замедление и изменение температуры мобильного устройства 900. Сенсорный компонент 914 содержит бесконтактный датчик, выполненный с возможностью обнаружения присутствия объекта, находящегося поблизости, когда нет физического контакта. Сенсорный компонент 914 содержит оптический датчик (например, КМОП или ПЗС-датчик изображения) выполненный с возможностью использования в визуализации приложения. В некоторых вариантах сенсорный компонент 914 содержит датчик ускорения, гироскоп, магнитный датчик, датчик давления или датчик температуры.
[86] Коммуникационный компонент 916 выполнен с возможностью облегчения проводной или беспроводной связи между мобильным устройством 900 и другими устройствами. Мобильное устройство 900 может получить доступ к беспроводной сети на основе стандарта связи, таких как WiFi, 2G или 3G, или их комбинации. В одном примерном варианте компонент 916 передачи данных получает широковещательный сигнал или трансляцию, связанную с ними информацию из внешней широковещательной системы управления через широковещательный канал. В одном варианте осуществления компонент 916 передачи данных содержит модуль коммуникации ближнего поля (NFC), чтобы облегчить ближнюю связь. Например, модуль NFC может быть основан на технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной (UWB) технологии, Bluetooth (ВТ) технологии и других технологиях.
[87] В примерном варианте осуществления, память 904 включает инструкции, которые выполняются процессором 918 мобильного устройства 900 для реализации описанных выше способов автоматизированной аутентификации пользователя на основании его подписи. Например, энергонезависимым компьютерно-читаемым носителем может быть ПЗУ, оперативное запоминающее устройство (ОЗУ), компакт-диск, магнитная лента, дискеты, оптические устройства хранения данных и тому подобное.


Изобретение относится к области вычислительной техники. Техническим результатом является упрощение аутентификации пользователя мобильного устройства. Раскрыт способ осуществления автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства, включающий следующие шаги: получают первый набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством МЭМС акселерометра мобильного устройства в форме цифрового сигнала, причем акселерометр преобразует в электрический цифровой сигнал, который кондиционируется так, чтобы его возможные уровни соответствовали входному диапазону аналого-цифрового преобразователя; осуществляют обработку цифрового сигнала для первого набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге, посредством сглаживания и фильтрации; получают второй набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством МЭМС акселерометра мобильного устройства в форме цифрового сигнала, причем акселерометр преобразует в электрический цифровой сигнал, который кондиционируется так, чтобы его возможные уровни соответствовали входному диапазону аналого-цифрового преобразователя; осуществляют обработку цифрового сигнала для второго набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге, посредством сглаживания и фильтрации; определяют величину расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства; сравнивают определенную на предыдущем шаге величину расстояния с заранее заданным значением, причем если расстояние меньше данного значения, идентифицируют пользователя и разрешают доступ к мобильному устройству; если расстояние больше данного значения, не идентифицируют пользователя и не разрешают доступ к мобильному устройству. 4 з.п. ф-лы, 10 ил.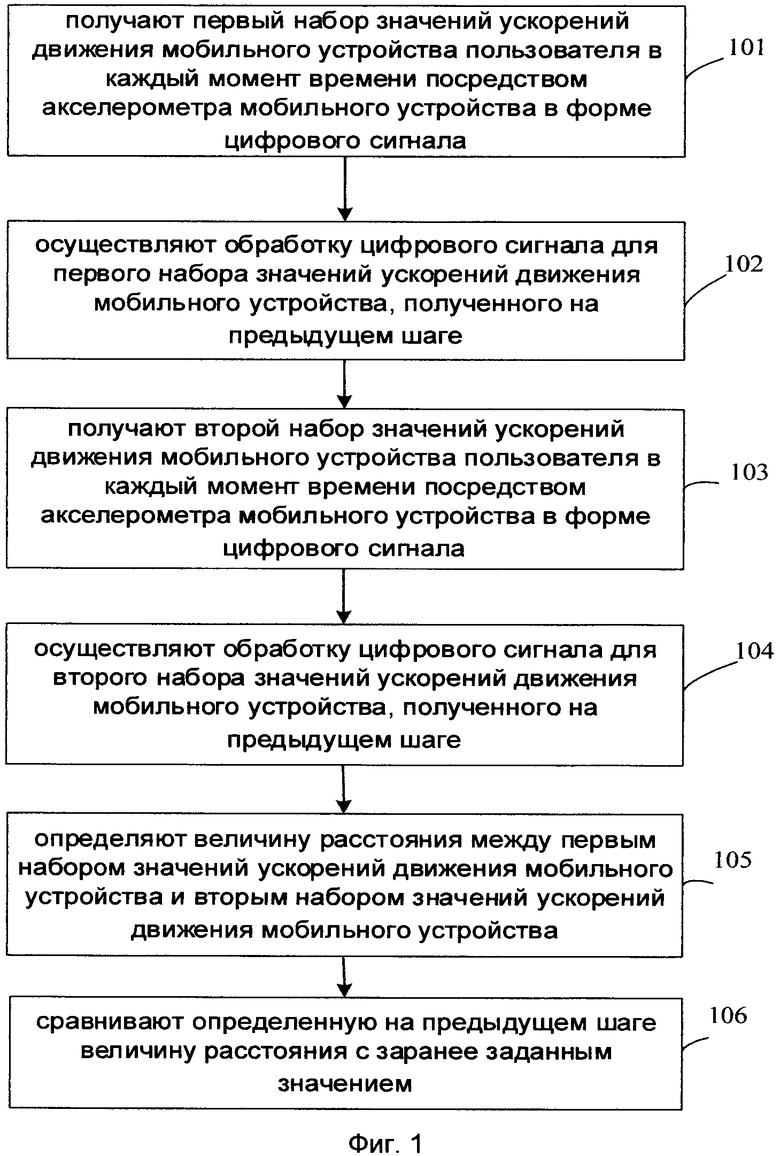
1. Способ осуществления автоматизированной аутентификации пользователя на основании его подписи, осуществляемой посредством движения в воздухе мобильного устройства, включающий следующие шаги:
• получают первый набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством МЭМС акселерометра мобильного устройства в форме цифрового сигнала, причем
- акселерометр преобразует в электрический цифровой сигнал, который кондиционируется так, чтобы его возможные уровни соответствовали входному диапазону аналого-цифрового преобразователя;
• осуществляют обработку цифрового сигнала для первого набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге, посредством сглаживания и фильтрации;
• получают второй набор значений ускорений движения мобильного устройства пользователя в каждый момент времени посредством МЭМС акселерометра мобильного устройства в форме цифрового сигнала, причем
- акселерометр преобразует в электрический цифровой сигнал, который кондиционируется так, чтобы его возможные уровни соответствовали входному диапазону аналого-цифрового преобразователя;
• осуществляют обработку цифрового сигнала для второго набора значений ускорений движения мобильного устройства, полученного на предыдущем шаге, посредством сглаживания и фильтрации;
• определяют величину расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства;
• сравнивают определенную на предыдущем шаге величину расстояния с заранее заданным значением, причем
- если расстояние меньше данного значения, идентифицируют пользователя и разрешают доступ к мобильному устройству;
- если расстояние больше данного значения, не идентифицируют пользователя и не разрешают доступ к мобильному устройству.
2. Способ по п. 1, характеризующийся тем, что при получении первого набора значений ускорений движения мобильного устройства акселерометр преобразует его в электрический цифровой сигнал, который кондиционируется.
3. Способ по п. 1, характеризующийся тем, что дополнительно с акселерометром используется гироскоп.
4. Способ по п. 1, характеризующийся тем, что при сглаживании сигнала используют фильтр нижних частот и/или фильтр Калмана.
5. Способ по п. 4, характеризующийся тем, что определяют величину расстояния между первым набором значений ускорений движения мобильного устройства и вторым набором значений ускорений движения мобильного устройства посредством использования евклидовой метрики.
| Токарный резец | 1924 |
|
SU2016A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАЩИТЫ ДОСТУПА К ДАННЫМ, СОХРАНЕННЫМ НА МОБИЛЬНОМ УСТРОЙСТВЕ, С ПОМОЩЬЮ ПАРОЛЯ | 2012 |
|
RU2488879C1 |

