ОБЛАСТЬ ТЕХНИКИ
[001] Данное техническое решение в общем относится к способам и системам безопасности и экономии топлива для транспортных средств и, в частности, относится к системам и способам, позволяющим последующему транспортному средству безопасно следовать за первым транспортным средством на близком расстоянии.
УРОВЕНЬ ТЕХНИКИ
[002] В настоящее время все большее распространение получают самоуправляемые автомобили. Следование за другим транспортным средством обеспечивает значительную экономию топлива, но, как правило, небезопасно, когда водитель делает это вручную.
[003] В настоящее время управление движением транспортных средств при нормальном движении осуществляется либо вручную, либо системами комфорта, а в редких аварийных ситуациях может управляться системами активной безопасности.
[004] Системы комфорта, такие как адаптивный круиз-контроль, контролируют скорость автомобиля, чтобы сделать его более приятным или расслабляющим для водителя, частично автоматизируя задачу вождения. Эти системы используют датчики дальности, чтобы затем контролировать скорость, чтобы поддерживать постоянный интервал до впереди идущего транспортного средства. В целом эти системы не обеспечивают дополнительной безопасности и не имеют полного контроля над транспортным средством (с точки зрения возможности полного торможения или ускорения), но они облегчают задачу вождения, что приветствуется водителем.
[005] Некоторые системы безопасности пытаются активно предотвращать аварии, автоматически тормозя автомобиль (без участия водителя) или помогая водителю затормозить автомобиль, чтобы избежать столкновения. Эти системы обычно не добавляют удобства и используются только в экстренных ситуациях, но они способны полностью контролировать движение автомобиля.
[006] Ручное управление водителем уступает по возможностям даже существующим системам по нескольким причинам. Во-первых, водитель с ручным управлением не может безопасно поддерживать близкое расстояние. На самом деле, такие виды дистанций, которые позволяют получить какой-либо измеримый выигрыш, приводят к небезопасным условиям, рискуя дорогостоящей и разрушительной аварией. Во-вторых, ручное вождение не так надежно в поддержании постоянного интервала движения, как автоматизированная система.
[007] Поэтому очевидно, что существует острая потребность в надежном и экономичном полуавтономном сопровождении транспортных средств. Эти усовершенствованные полуавтономные системы сопровождения транспортных средств позволяют транспортным средствам следовать близко друг к другу безопасно, эффективно и удобным способом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[008] Технической проблемой или технической задачей, решаемой в данном техническом решении, является осуществление способа и системы управления группой самоуправляемых транспортных средств.
[009] Техническим результатом, достигаемым при решении вышеуказанной технической проблемы, является повышение эффективности экономии энергии транспортного средства за счет уменьшения сопротивления воздуха двигающимся пелотоном.
[0010] Дополнительным техническим результатом является снижение дорожных пробок и заторов, которые уменьшаются за счет движения пелотона и экономии площади дорожного покрытия.
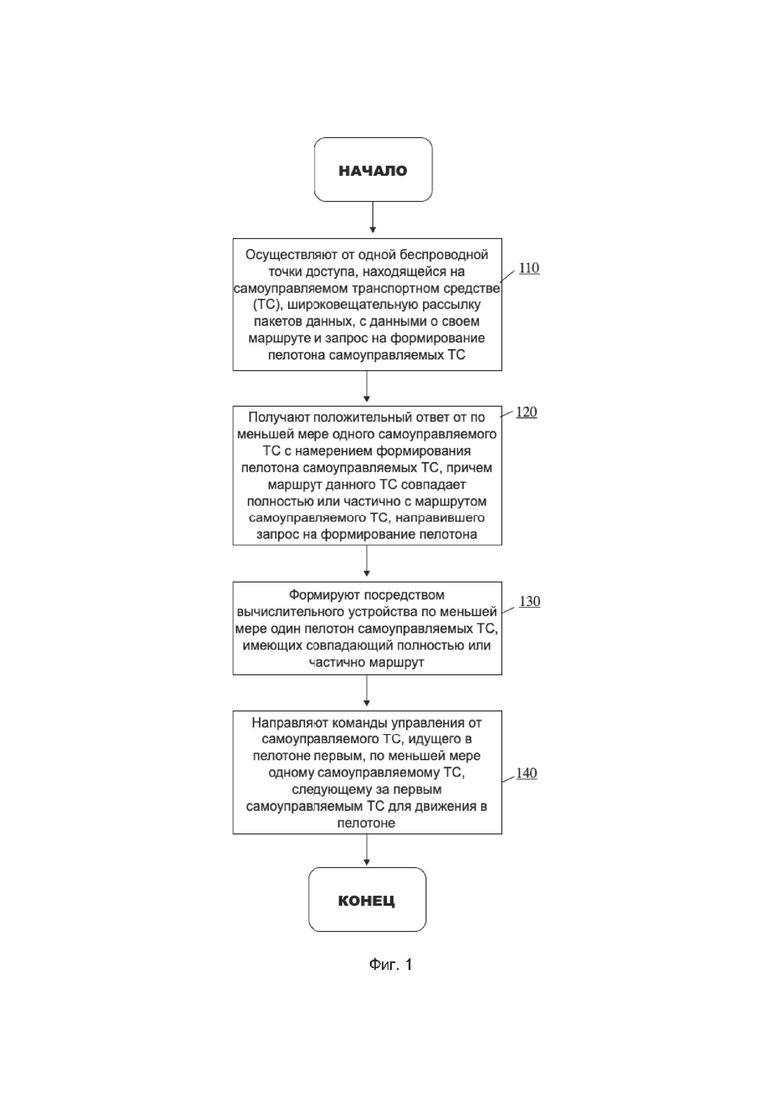
[0011] Указанный технический результат достигается за счет осуществления способа управления группой самоуправляемых транспортных средств, который выполняется посредством по меньшей мере одного вычислительного устройства, и в котором осуществляют от одной беспроводной точки доступа, находящейся на самоуправляемом транспортном средстве (ТС), широковещательную рассылку пакетов данных, с данными о своем маршруте и запрос на формирование пелотона самоуправляемых ТС; получают положительный ответ от по меньшей мере одного самоуправляемого ТС с намерением формирования пелотона самоуправляемых ТС, причем маршрут данного ТС совпадает полностью или частично с маршрутом самоуправляемого ТС, направившего запрос на формирование пелотона; формируют посредством вычислительного устройства по меньшей мере один пелотон самоуправляемых ТС, имеющих совпадающий полностью или частично маршрут; направляют команды управления от самоуправляемого ТС, идущего в пелотоне первым, по меньшей мере одному самоуправляемому ТС, следующему за первым самоуправляемым ТС для движения в пелотоне.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Признаки и преимущества настоящего технического решения станут очевидными из приведенного ниже подробного описания и прилагаемых чертежей, на которых:
[0013] На Фиг. 1 показан вариант реализации способа управления группой самоуправляемых транспортных средств в виде блок-схемы.
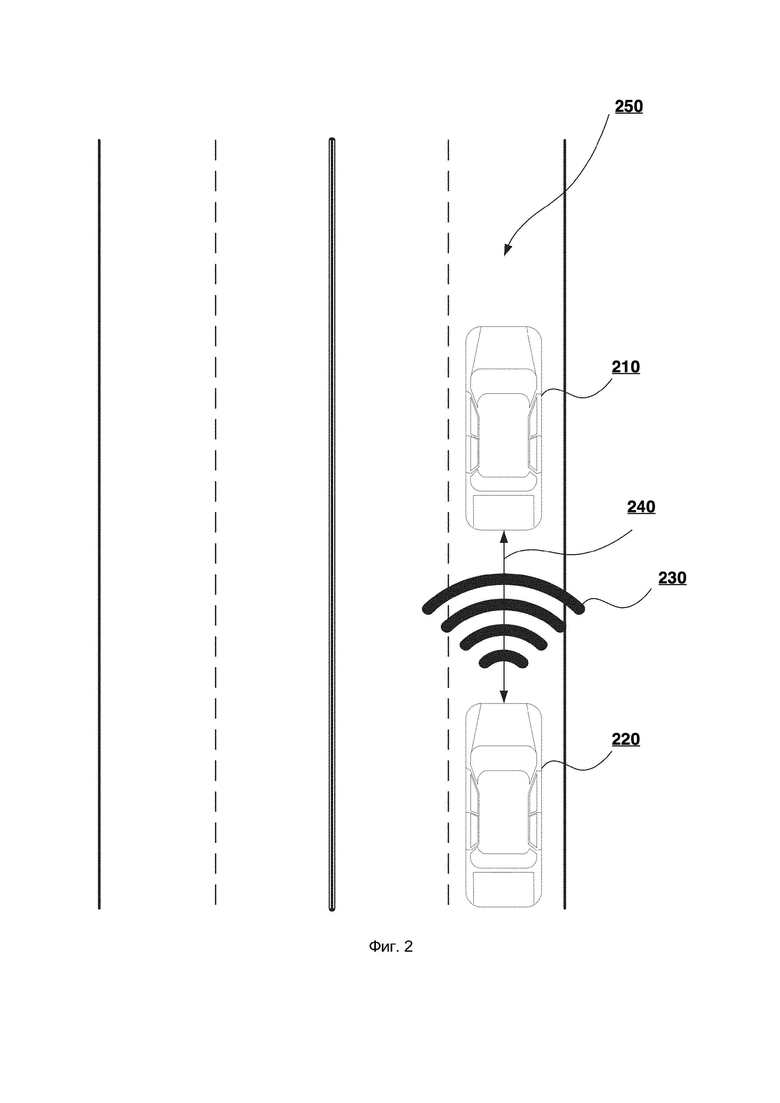
[0014] На Фиг. 2 показан вариант реализации широковещательной рассылки пакетов данных между самоуправляемыми транспортными средствами.
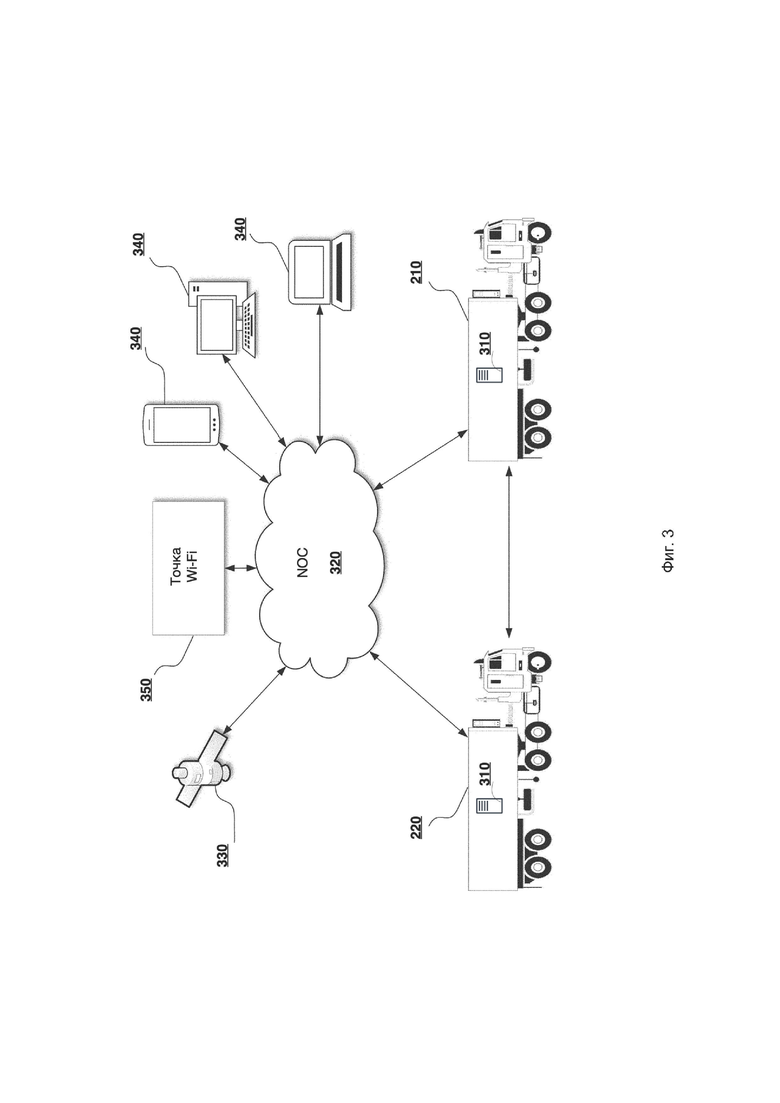
[0015] На Фиг. 3 показан вариант реализации движения пелотона из
самоуправляемых транспортных средств и его взаимодействия с центром управления сетью NOC.
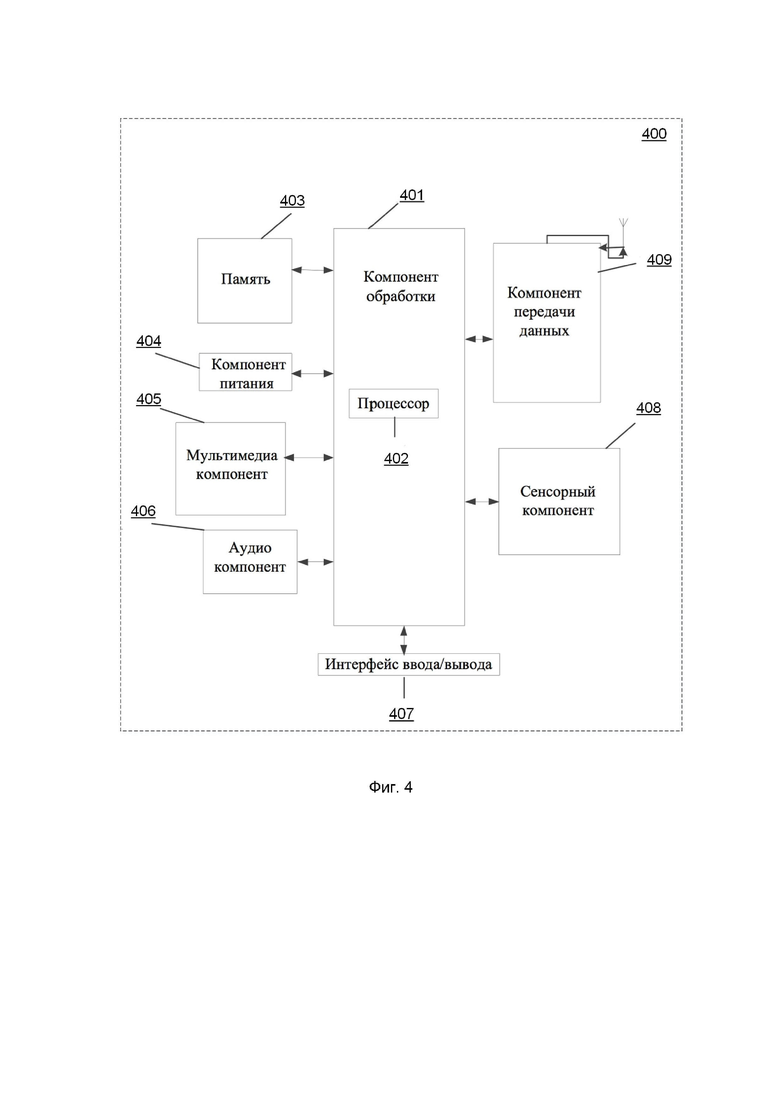
[0016] На Фиг. 4 показан вариант реализации системы управления группой самоуправляемых транспортных средств.
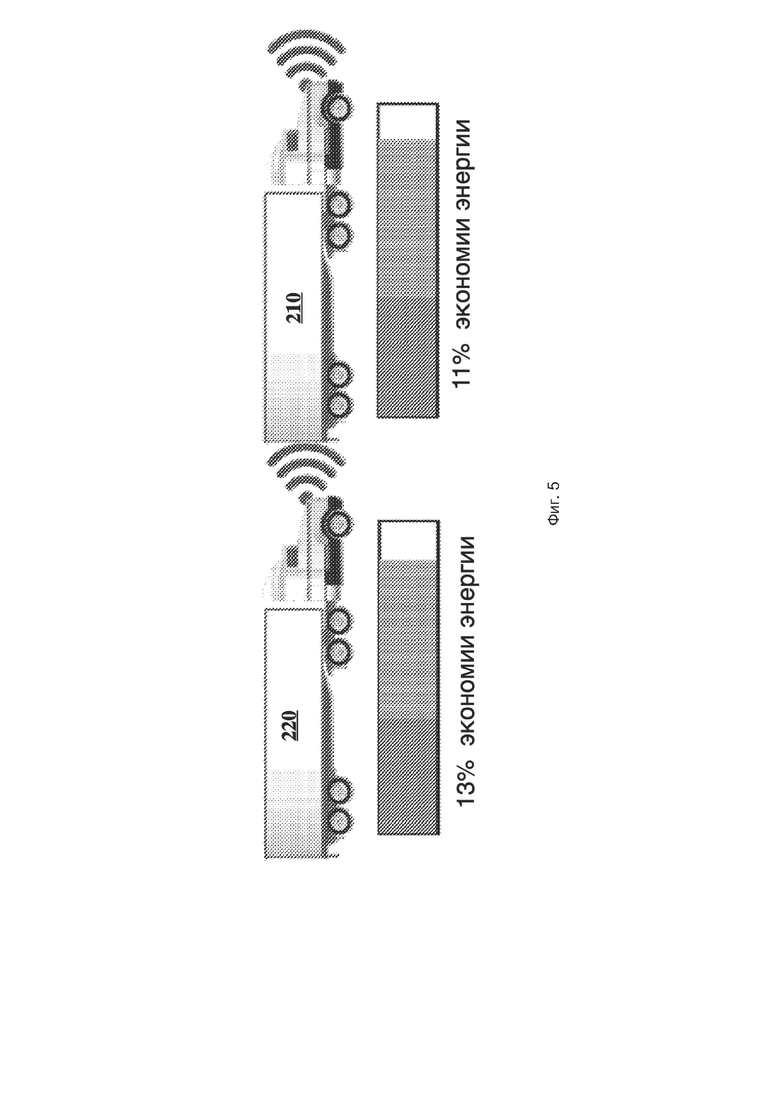
[0017] На Фиг. 5 показан пример реализации движения в пелотоне, который позволяет самоуправляемым ТС экономить значительную часть энергии за счёт движения в аэродинамической тени других ТС.
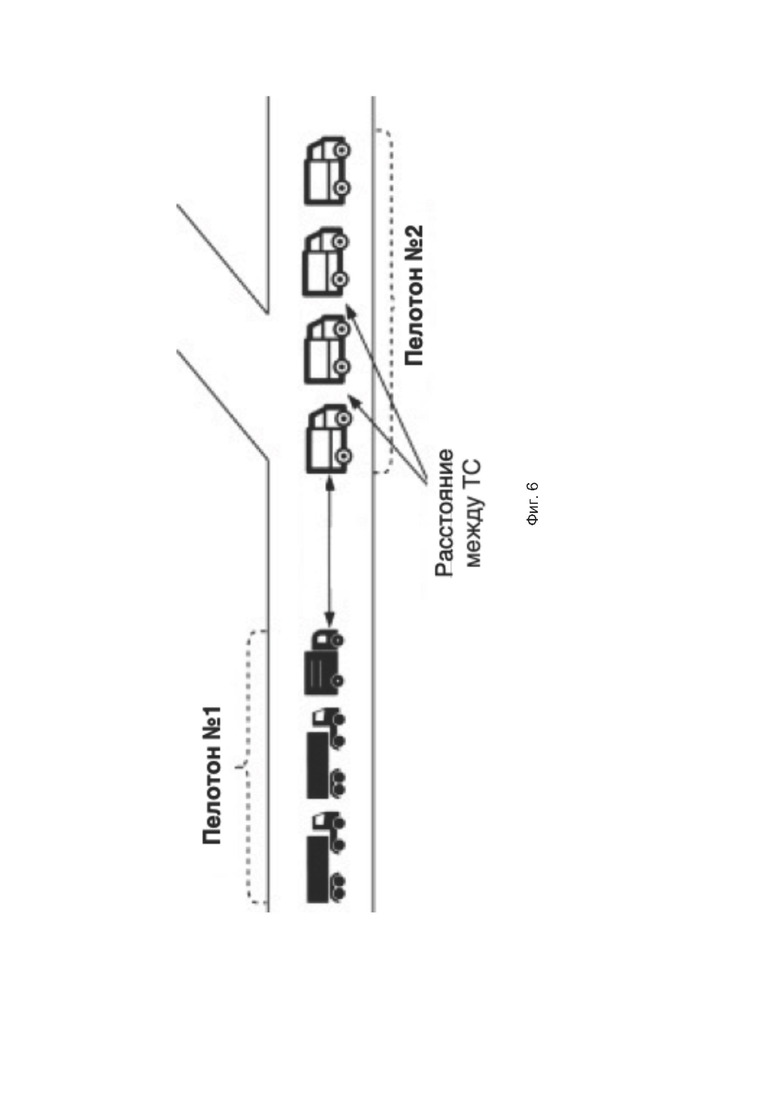
[0018] На Фиг. 6 показан вариант реализации взаимодействия между пелотонами.
ПОДРОБНОЕ ОПИСАНИЯ ИЗОБРЕТЕНИЯ
[0019] Ниже будут подробно рассмотрены термины и их определения, используемые в описании технического решения.
[0020] В данном изобретении под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций), централизованные и распределенные базы данных, смарт-контракты.
[0021] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы), смарт-контракт, виртуальная машина Ethereum (EVM) или подобное. Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы. [0022] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[0023] Кроме того, описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры, предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть очевидно, что любые описанные структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Аналогично, должно быть очевидно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены в пригодной для чтения компьютером среде и выполняться с использованием компьютера или процессора, независимо от того, показан такой компьютер или процессор в явном виде или нет.
[0024] Функции различных элементов, представленных на иллюстрациях, в том числе любого функционального блока, обозначенного как «процессор», могут быть осуществлены с использованием специализированных аппаратных средств, а также аппаратных средств, способных выполнять соответствующие программы. В случае использования процессора эти функции могут быть выполнены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не следует трактовать как указание исключительно на аппаратные средства, способные выполнять программное обеспечение; оно может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP, Digital Signal Processor), сетевой процессор, специализированную интегральную схему (ASIC, Application Specific Integrated Circuit), программируемую логическую схему (FPGA, Field Programmable Gate Array), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Кроме того, могут быть предусмотрены и другие обычные и/или заказные аппаратные средства.
[0025] В данном документе программные модули или просто модули, реализуемые программными средствами, могут быть представлены в виде любого сочетания элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться показанными явно или подразумеваемыми аппаратными средствами.
[0026] Далее с учетом вышеизложенных принципов рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты осуществления аспектов настоящей технологии.
[0027] Ниже будет подробно раскрыт способ управления группой самоуправляемых транспортных средств, выполняемый посредством по меньшей мере одного вычислительного устройства и показанный на Фиг. 1.
[0028] Шаг 110: осуществляют от одной беспроводной точки доступа, находящейся на самоуправляемом транспортном средстве (ТС), широковещательную рассылку пакетов данных, с данными о своем маршруте и запрос на формирование пелотона самоуправляемых ТС.
[0029] Транспортное средство 210, как показано на Фиг. 2, с которым связана беспроводная точка доступа, может представлять собой любое транспортное средство для отдыха или перевозки грузов, такое как автомобиль для личного или коммерческого использования, грузовой автомобиль, мотоцикл и т.д. Транспортное средство 210 может представлять собой самоуправляемое транспортное средство. Следует отметить, что не накладывается каких-либо ограничений на конкретные параметры транспортного средства 210, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства, рабочий объем двигателя и т.д.
[0030] В различных примерах транспортное средство 210 может включать в себя или оснащаться одним или большим количеством датчиков, таких как набор видеокамер, набор устройств взвешивания, набор датчиков подвески, набор датчиков обнаружения света и дальности (LIDAR), набор ультразвуковых датчиков, набор датчиков определения местоположения, набор радиочастотных датчиков (таких как Bluetooth или Wi-Fi приемопередатчиков), а также других датчиков, используемых для различных действий с транспортным средством (например, датчиков двигателя, датчиков давления в шинах, датчиков открытия или закрытия дверей, датчиков ремней безопасности, внешних стерео-камер или LIDAR датчиков для AV и так далее). Набор датчиков, как описано в данном документе, может соответствовать одному или большему количеству индивидуальных датчиков или одному или большему количеству массивов датчиков.
[0031] На реализацию вычислительного устройства 310, показанному на Фиг. 3, находящемся на самоуправляемом транспортном средстве 210 или где-то удаленно, не накладывается каких-либо ограничений. Вычислительное 310 устройство может быть реализовано, например, в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, автомобильного навигатора (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство, и т.д. Следует отметить, что вычислительное устройство 310 может быть постоянно связано или не связано с транспортным средством 210. В качестве дополнения или альтернативы, вычислительное устройство 310 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления вычислительное устройство 310 содержит дисплей.
[0032] Широковещательная рассылка пакетов 230 осуществляется с помощью технологии DSRC, которая является разновидностью технологии Wi-Fi для применения на движущемся транспорте и обеспечивает следующие характеристики:
- практически мгновенное (менее 1/4 секунды) соединение;
- передача данных на скоростях до 100 мегабит на дальность до 1 км;
- устойчивая работа при движении транспорта со скоростью до 250 км/ч.
[0033] В некоторых вариантах реализации при широковещательной рассылке пакетов данных 230 запрос на формирование пелотона 240 самоуправляемых ТС, двигающегося по трассе или шоссе 250, может содержать координаты ТС 210 для ТС 220, маршрут пелотона 240, стоимость движения в пелотоне 240 и другие технические характеристики, не ограничиваясь.
[0034] Основное отличие DSRC 230 от ближайшего своего аналога Wi-Fi заключается в том, что DSRC применяется под связь с быстро движущимся объектом. То есть, пока самоуправляемое ТС 210 проезжает в зоне действия антенны другого самоуправляемого ТС 220 для формирования пелотона 240, транспондер должен перейти в активный режим, установить соединение и произвести обмен информацией. На практике на скорости 90 км/ч можно надежно передать 1 МБ информации. В некоторых вариантах реализации увеличивают скорость до 4 МБ, но появляется риск потери связи. Во время проезда самоуправляемого ТС 210 в поле действия радиуса другого самоуправляемого ТС 220 происходит следующее:
- приемо-передающее устройство самоуправляемого ТС 210,
двигающегося в пелотоне, получает сигнал маяка и «просыпается».
Сигнал маяка содержит структуру данных BST с перечнем предоставляемых сервисов (приложений), которые поддерживаются на данной точке. Время между получением первого сигнала антенны (любого, не обязательно содержащего BST) и готовностью транспондера к работе составляет 5 мс.
- антенна и приемо-передающее устройство самоуправляемого ТС 210, двигающегося в пелотоне, определяют канал, по которому будет осуществляться обмен. По дороге едет и останавливается множество автомобилей, и разделение канала необходимо.
- приемо-передающее устройство при помощи структуры данных VST сообщает о приложении (или приложениях), которое ему необходимо. Например, EFC — присоединение к пелотону 240.
- антенна и приемо-передающее устройство устанавливают защищенное соединение и обмениваются данными в рамках выбранного приложения.
[0035] Формат пакета широковещательной рассылки 230 в случае использования DSRC выглядит следующим образом.
- преамбула (preamble), которая нужна для синхронизации приемо-
передающего устройства и антенны.
- Start flag — 0111 1110.
- LID — идентификатор ссылки для броадкаста 11111111, для остальных случаев — четыре октета случайно выбранных во время установления соединения чисел для идентификации канала обмена с конкретным приемо-передающим устройством.
- MAC control field содержит информацию о содержимом пакета — аплинк
или даунлинк, команда или ответ на команду и т.п.
- LLC control содержит тип команды или ответа на команду,
- LLC status, соответственно, содержит результат выполнения команды
- LPDU — собственно, информация прикладного уровня (рассмотрим ее отдельно).
[0036] Прикладной блок может передаваться по частям, если не умещается в один физический пакет. Завершается фрейм CRC контрольной суммой и стоп-битами аналогичными стартовому флагу.
[0037] В некоторых вариантах реализации технология DSRC 230 дополняется технологиями динамической маршрутизации для построения одноранговых сетей, DTN (Delay&Disruption-Tolerant Networking – сетей, устойчивых к задержкам), глобального геопозиционирования ГЛОНАСС/GPS, что позволяет решить большинство проблем, характерных для традиционных систем управления и связи. Кроме того, данная технология позволяет существенно повысить технические характеристики системы за счёт размещения средств первичной обработки данных непосредственно на приёмо-передающих устройствах без отправки больших объёмов информации в вычислительныецентры.
[0038] Вычислительное устройство 310, находящееся в самоуправляемом ТС 210, может содержать модуль безопасности (VUSM). Данная функция отвечает за защиту данных, которые подлежат передаче с DSRC-VU другому ТС с запросом на формирование пелотона 240 самоуправляемых ТС.
[0039] Защищённые данные хранятся в памяти VUSM. С интервалами (например, каждую минуту), вычислительное устройство 310 шифрует и пополняет данные RTM (включающие в себя значения данных полезной нагрузки и данных безопасности, представленные ниже в настоящем приложении), хранящиеся в памяти DSRC-VU. Работа модуля безопасности не входит в область применения настоящего изобретения, кроме того, что требуется обновлённые данные предоставлять устройству связи каждый раз, когда данные VUSM меняются.
[0040] Связь между вычислительным устройством 310 и DSRC-VU может быть проводной или беспроводной Bluetooth Low Energy (BLE), а физическое расположение DSRC-VU может составлять единое целое с антенной или лобовым стеклом транспортного средства 210, быть внутри БУ или находиться где-то между ними.
[0041] DSRC-VU обеспечивается надёжным источником питания в любой момент времени. Способы обеспечения питания определяются в рамках проектного решения.
[0042] Память DSRC-VU энергонезависимая, чтобы данные на DSRC-VU сохранялись даже в том случае, если зажигание транспортного средства выключено.
[0043] Если связь между вычислительным устройством 310 и DSRC-VU осуществляется через BLE, а источник питания – не подзаряжаемая батарея, источник питания DSRC-VU заменяется при каждой регулярной проверке, а производитель оборудования DSRC- VU обязан позаботиться о том, чтобы питание было достаточным на весь период между двумя регулярными проверками, и чтобы в течение этого периода любое устройство REDCR могло получить доступ к данным без сбоев или перерывов.
[0044] DSRC-VU является встроенным в антенну или соединённым с ней устройством, обеспечивает связь с вычислительным устройством 310 через проводное или беспроводное подключение (BLE), где хранятся текущие данные (данные VUPM) и осуществляется контроль ответов на запросы при помощи DSRC 5,8 гГц. Разъединение устройства DSRC или помехи в функциях устройства DSRC при нормальной эксплуатации транспортного средства считаются нарушением регламента связи.
[0045] Шаг 120: получают положительный ответ от по меньшей мере одного самоуправляемого ТС с намерением формирования пелотона самоуправляемых ТС, причем маршрут данного ТС совпадает полностью или частично с маршрутом самоуправляемого ТС, направившего запрос на формирование пелотона.
[0046] Аналогично каждое самоуправляемое ТС 210 содержит модуль безопасности (REDCR) (SM-REDCR), который используется для расшифровки и проверки целостности данных, исходящих из вычислительного устройства 310, осуществляющего широковещательную рассылку пакетов данных 230, с данными о своем маршруте и запрос на формирование пелотона 240 самоуправляемых ТС.
[0047] Функция DSRC (REDCR) (DSRC-REDCR) включает в себя трансивер 5,8 гГц и встроенные программы и другое программное обеспечение контроля связи с DSRC-VU в соответствии с настоящим техническим решением.
[0048] DSRC-REDCR запрашивает DSRC-VU отправившего запрос транспортного средства и получает данные (текущие данные VUPM отправившего запрос транспортного средства) через соединение и процессы DSRC и хранит полученные данные в своём SM-REDCR.
[0049] Антенна DSRC-VU располагается в таком месте, откуда она оптимизирует связь DSRC между транспортным средством и придорожной антенной (в целом или ближе к центру лобового стекла транспортного средства). На легковых транспортных средствах устройство может устанавливаться на уровне верхней части лобового стекла.
[0050] Перед антенной или вблизи неё не должны находиться никакие металлические объекты (например, именные таблички, наклейки, отражающие элементы из фольги (тонировка), козырьки от солнца, стеклоочистители лобового стекла в неподвижном состоянии), которые могут создать помехи связи. Антенна устанавливается так, чтобы её осевое направление было примерно параллельно поверхности дороги.
[0051] Данный набор характеристик связан с примером использования, когда ТС 210, получающее запрос для удаленной связи ближнего действия пользуется считывающим устройством удалённой связи раннего обнаружения (интерфейсами DSRC 5,8 гГц, интерфейсами, применяемыми в соответствии с ERC 70- 03 и тестируемыми по соответствующим параметрам EN 300 674-1) (REDCR) с целью удалённой идентификации транспортного средства для формирования пелотона 240 самоуправляемых ТС.
[0052] В данном случае самоуправляемое ТС 220, содержащее REDCR, получает пакеты широковещательной рассылки 230 с транспортного средства 210 в направлении центральной части лобового стекла транспортного средства 210. Получение сигналов осуществляется с помощью интерфейса DSRC 5,8 гГц в рамках ERC 70-03.
[0053] Ниже будет подробно раскрыт получения пакетов широковещательной рассылки.
[0054] Протокол операции по загрузке данных в соединении интерфейса DSRC 5,8 гГц реализуется в рамках следующих этапов. В настоящем решении описана последовательность операций в идеальных условиях без повторных передач или перерывов связи. Цель этапа инициализации (этап 1) – установить связь между REDCR и DSRC-VU, попавших в зону операции DSRC 5,8 гГц (ведущий-ведомый), но ещё не установивших связь с REDCR, и передавать уведомления о процессах в приложении.
[0055] Этап 1 Инициализация. REDCR передаёт фрейм с таблицей использования радиомаяков (BST), в которую входят идентификаторы приложений (AID) в перечне поддерживаемых услуг. В приложении RTM это просто услуга со значением AID = 2 (Freight&Fleet). DSRC-VU оценивает полученную BST и отвечает (см. ниже), выдавая перечень поддерживаемых приложений в области Freight&Fleet, или не отвечает, если никакие приложения не поддерживаются. Если REDCR не предлагает AID = 2, DSRC-VU не отвечает REDCR.
[0056] Этап 2 DSRC-VU передаёт фрейм с запросом назначить частное окно.
[0057] Этап 3 REDCR передаёт фрейм с назначенным частным окном.
[0058] Этап 4 DSRC-VU использует назначенное частное окно для передачи
фрейма с таблицей обслуживания транспортного средства (VST). В такой VST представлен перечень всех различных вариантов инстанцирования приложений, кот рые данное DSRC-VU поддерживает в рамках AID = 2.
Различные варианты инстанцирования определяются при помощи уникальных EID, каждый из которых связан со значением параметра контекстной метки приложения с указанием на приложение и поддерживаемый стандарт.
[0059] Этап 5 Затем REDCR анализирует предложенную VST и прерывает связь (RELEASE), так как больше в VST ничего не интересует (т.е. получает VST из DSRC-VU, которое не поддерживает операцию RTM), или, если получает соответствующую VST, запускает инстанцирование приложения.
[0060] Этап 6 Для этого REDCR передаёт фрейм с командой для извлечения данных RTM с указанием инстанцирования приложения RTM и идентификатора, соответствующего инстанцированию приложения RTM (как DSRC-VU указывает в VST), и назначает частное окно.
[0061] Этап 7 DSRC-VU использует назначенное частное окно для передачи фрейма, в котором содержится адресный идентификатор, соответствующий инстанцированию приложения RTM, как указано в VST, с последующим свойством RtmData (полезный элемент + элемент безопасности).
[0062] Этап 8 Если поданы запросы на многие услуги (например, не только формирование пелотона, а обслуживание ТС), значение «n» меняется на следующий номер услуги, и процесс повторяется.
[0063] Этап 9 REDCR подтверждает получение данных, передавая фрейм с командой RELEASE на DSRC-VU для прекращения сеанса ИЛИ, если не удалось подтвердить успешное получение LDPU, возвращается к этапу 6.
[0064] Если маршрут частично или полностью получившего запрос
самоуправляемого ТС 220 совпадает с маршрутом направившего запрос о формировании пелотона 240 ТС 210, в ответ данное ТС 220 направляет положительный ответ. Очевидно, что ответ может быть цифровым или литеральным, не ограничиваясь.
[0065] Функция отображения и/или уведомления используется для представления результатов функции удалённой связи. Отображение возможно на экране вычислительного устройства 310, в распечатанном виде, в виде аудиосигнала или в разных сочетаниях этих форм. Форма отображения и/или уведомления зависит от требований направившего запрос самоуправляемого ТС 210 и проектных характеристик изделия и в данном техническом решении не обсуждается.
[0066] Когда транспортные средства (например, 210 и 220) находятся в составе пелотона 240 или поблизости в радиусе действия канала связи ближнего действия, такого, например, как DSRC 230, в системе достаточно для передачи сообщений между процессорами или бортовыми системами каждого ТС, хотя могут использоваться и другие формы беспроводной связи, например сотовая связь. Однако даже в составе пелотона 240 машинам полезно поддерживать постоянную связь с NOC 320, как показано на Фиг. 3. Как будет более подробно описано ниже, от каждого самоуправляемого ТС (например, 210 и 220) к NOC 310 отправляется множество данных, включая состояние и производительность самоуправляемого ТС 210, изменения маршрута, местную погоду и другие данные. Это позволяет оператору автопарка заранее управлять техническим обслуживанием и ремонтом грузовиков, корректировать маршрут пелотона 240 или пелотонов в зависимости от погодных условий или дорожного строительства, определять местоположение самоуправляемого ТС 210 в случае чрезвычайной ситуации и управлять множеством других аналитических данных.
[0067] В примерном варианте осуществления каналов связи для управления обменом сообщениями в системе могут быть следующая архитектура. Более конкретно, данный вариант осуществления использует различные протоколы связи для управления обменом сообщениями между потенциальными или фактическими партнерами по пелотону 240, одним или несколькими связанными центрами NOC 320, точкой беспроводного доступа, которая обеспечивает удаленный доступ к центрам NOC 320. В случаях, когда связь с NOC 320 недоступна в течение определенного периода времени осуществляется вариант осуществления ячеистой сети, посредством которой сообщения могут передаваться между NOC 320 и транспортным средством 210 через промежуточные транспортные средства. В частности, транспортное средство 210 поддерживает связь с партнерским транспортным средством 220 пелотона 240 через DSRC 230 или другие подходящие проводные или беспроводные технологии. Кроме того, на большей части маршрута транспортного средства оно также поддерживает связь с NOC 230 через сотовую связь 240.
Аналогичным образом, транспортное средство 210 связывается с NOC 320 через сотовую линию связи 240 при отсутствии разрыва беспроводной линии связи.
[0068] Однако сотовая связь 240 не всегда возможна, особенно в ТС, передвигающихся на большие расстояния по пересеченной местности. Кроме того, сотовая связь 240 является относительно медленной для передачи больших объемов данных, например, тех, которые могут храниться в автомобиле, если в нем используется видеозапись или другие функции с высокой пропускной способностью. Таким образом, в некоторых вариантах осуществления транспортные средства 210 и 220 также оборудованы для доступа к точкам доступа Wi-Fi 350, которые, в свою очередь, обмениваются данными с центром управления сетью 320 (NOC) либо через беспроводную линию связи, либо через проводной канал связи. Стационарные точки доступа Wi-Fi 350 все чаще встречаются вдоль проезжей части, а также в центрах управления сетью. Кроме того, могут быть введены точки доступа Wi-Fi в транспортных средствах на основе 4G LTE или аналогичных услуг, например, Microcell и аналогичных технологий, которые также могут в некоторых случаях обеспечивать канал связи.
[0069] В некоторых вариантах осуществления может использоваться метод ретрансляции, основанный на одноранговой ячеистой сети. Например, предположим, что транспортное средство 210 движется на восток и только что проехало зону с хорошей связью с NOC 320 (центр управления сетью, англ. «network operations center»), но теперь проходит через зону, в которой отсутствует беспроводная связь. Основная задача NOC 320 — автоматизация повседневной работы центра управления сетью. Центр сетевых операций или иногда центр управления сетью 320 представляет собой один или несколько серверов, из которых осуществляется мониторинг и контроль сети или управление сетью через компьютер, связь или спутниковую сеть.
[0070] Предположим также, что транспортное средство X, движется на запад и в течение некоторого времени не имело связи, но восстановит беспроводную связь раньше, чем ТС, отправляющее сигналы. По крайней мере, в некоторых вариантах осуществления управляющий сервер знает с достаточной точностью определяет местонахождение каждого из транспортных средств, которые он отслеживает, на основе прогнозов поездок, более подробно обсуждаемых ниже, даже когда сотовая или аналогичная связь недоступна. Таким образом, если NOC 320 необходимо отправить информацию транспортному средству X, NOC 320 отправляет самоуправляемому ТС сообщение для транспортного средства X, в то время как самоуправляемое ТС все еще имеет связь с NOC 320. Затем, когда самоуправляемое ТС и транспортное средство X находятся рядом, самоуправляемое ТС передает сообщение NOC 320 транспортному средству X. Аналогичным образом, если ТС необходимо передать данные в NOC 320, но в настоящее время нет связи с NOC 320, оно может передать свои данные на транспортное средство X, и транспортное средство X повторно передает данные в NOC 320, когда транспортное средство X восстанавливает связь с NOC 320.
[0071] Специалистам в данной области техники будет понятно, что в некоторых вариантах осуществления, хотя, возможно, и не в других, такой беспроводной обмен сообщениями будет зашифрован в целях безопасности. При соответствующих мерах безопасности транспортные средства, не находящиеся в управлении парком, также могут использоваться для передачи сообщений. Например, транспортные средства Y и Z, могут получать сообщения от транспортных средств A и B и затем ретранслировать их в NOC 320, если они должным образом оборудованы для связи с NOC 320, что может осуществляться посредством стандартного протокола. В среде, имеющей достаточное количество транспортных средств, оборудованных для беспроводной связи, создается ячеистая сеть, по которой сообщения могут передаваться от транспортного средства к транспортному средству, а оттуда в NOC320. Такая ячеистая сеть также позволяет передавать сообщения о состоянии от транспортного средства к транспортному средству, так что, например, пелатон 240 транспортных средств знает о состоянии окружающих транспортных средств. Например, пелатон 240 может быть проинформирован о том, где автомобиль слева должен съехать с проезжей части, что, например, позволяет взводу избежать подрезки этого автомобиля между транспортными средствами или иного непредвиденного поведения. Аналогичным образом, пелотону 240, состоящему из машин A и B, можно заблаговременно сообщать об аварийных условиях, что позволяет повысить эксплуатационную безопасность.
[0072] В некоторых вариантах реализации запросы в пелотоне 240 могут формироваться посредством технических устройств пользователя 340, таких как телефон, планшет, персональный компьютер, портативный компьютер и так далее.
[0073] Шаг 130: формируют посредством вычислительного устройства по меньшей мере один пелотон самоуправляемых ТС, имеющих совпадающий полностью или частично маршрут.
[0074] По крайней мере, в некоторых вариантах осуществления надежно безопасный пелотон 240 формируется посредством вычислительного устройства 310. В некоторых вариантах реализации в целях создания пелотона 240, передают команды управления через коммуникационный шлюз в бортовые системы самоуправляемых транспортных средств (например, 210 и 220).
Бортовая система получает от NOC 320 информацию о парах транспортных средств, которые, по мнению NOC 320, имеют возможность связывания, с последующими разрешениями на связывание в соответствующее время. Кроме того, бортовая система получает предупреждения об опасности, которые в целом включают в себя опасности для транспортного средства в зависимости от предполагаемого маршрута движения.
[0075] Бортовая система содержит, с функциональной точки зрения, один или несколько электронных блоков управления (ЭБУ) или ECU, которые управляют различными функциями. ECU (Electronic Control Unit) - электронный блок управления, является общим термином для любого электронного блока управления. Для простоты пояснения ЭБУ обеспечивает обработку сообщений и управление связью. Специалистам в данной области техники понятно, что функция ЭБУ может быть реализована в отдельном устройстве или может быть интегрирована в ЭБУ, который также обеспечивает другие функции. Следует понимать, что в большинстве случаев ЭБУ, как описано здесь, содержит контроллер или другой процессор вместе с соответствующим запоминающим устройством и другими вспомогательными устройствами для выполнения программных инструкций того типа, который обсуждается более подробно, как описано здесь. В варианте осуществления ЭБУ управляет интерфейсами Wi-Fi, LTE и Bluetooth соответственно, и, в свою очередь, осуществляет двунаправленную связь с функцией ЭБУ контроллера пелотона. Функция ЭБУ контроллера пелотона, в свою очередь, осуществляет двунаправленную связь с другими кандидатами в члены пелотона через канал DSRC, а также выводит данные на дисплей водителя.
[0076] По меньшей мере, в некоторых вариантах осуществления функция бортового ЭБУ связывается с шиной CAN транспортного средства, которая обеспечивает соединение с контроллером пелотона, контроллером журнала, интерфейсом водителя. ЭБУ также возвращает в NOC 320 отчеты о местоположении и состоянии транспортного средства со скоростью примерно один раз в секунду. Кроме того, когда доступен канал передачи данных с подходящей высокой пропускной способностью и низкой стоимостью, такой как Wi-Fi, ЭБУ выгружает свой журнал в NOC 320. В зависимости от варианта осуществления журнал может содержать все данные, включая видеоинформацию, или может содержать подмножество этих данных. Например, в одном варианте дамп журнала может содержать некоторые или все данные шины CAN, включая данные SAE J1939, некоторые или все данные радара, лидара и видео, некоторые или все данные GPS, некоторые или все данные DSRC и некоторые или все данные о состоянии. Специалистам в данной области техники будет понятно, что не все такие данные передаются по шине CAN, а вместо этого могут передаваться через Ethernet-соединение, двухточечное соединение или другую подходящую линию связи.
[0077] Шаг 140: направляют команды управления от самоуправляемого ТС, идущего в пелотоне первым, по меньшей мере одному самоуправляемому ТС, следующему за первым самоуправляемым ТС для движения в пелотоне.
[0078] Контроллер пелатона осуществляет двустороннюю связь с модулем связи между транспортными средствами в отношении массы, положения, скорости, крутящего момента/торможения, передачи и неисправностей. Более конкретно, контроллер получает по линии связи DSRC данные о другом транспортном средстве, включая массу, положение, скорость, состояние крутящего момента/тормоза, передачу и неисправности. Контроллер пелатона использует эти входы для предоставления данных о состоянии на уровень супервизора, как упоминалось выше, а также предоставляет команды крутящего момента и торможения, а также передачи. При отсутствии датчика передачи выбор передачи для механических коробок передач можно рассчитать на основе частоты вращения двигателя и скорости вращения шин. Передача на автоматических коробках передач может определяться непосредственно с ЭБУ коробки передач.
[0079] Контроллер пелотона также получает информацию о состоянии и неисправности от функции приведения в действие самоуправляемого ТС, которая содержит функции рулевого управления, дроссельной заслонки, переключения передач, сцепления и торможения, а также другие действия.
[0080] Обработка данных, которая происходит на транспортном средстве, может быть лучше оценена. Когда транспортное средство запускается, аппаратное обеспечение запускается также. Обработчики шины данных регистрируются в системе, используя либо конфигурацию по умолчанию, либо, если конфигурация была получена от NOC 320 и активна, с использованием этой активной конфигурации. На следующем этапе запускается «слушатель» авторизации пелотона, функция которого состоит в прослушивании сообщений авторизации пелотона от NOC 320.
[0081] Затем на следующем этапе обрабатываются последние данные о событии с транспортным средством, после чего на следующем этапе выполняется проверка, было ли получено уведомление об авторизации пелотона от NOC 320. Если это так, запись авторизации отправляется в контроллер с помощью интерфейса программного обеспечения, такого как API.
Если авторизация пелотона не была получена, выполняется проверка, чтобы определить, было ли получено изменение конфигурации от NOC 320. Если это так, новая конфигурация реализуется и изменяет, какие данные собираются с транспортного средства и сообщаются в NOC 320 в сообщении «навигационной цепочки», и отправляется сигнал перезапуска, чтобы вызвать возврат к этапу, где обработчики шины данных переустанавливаются.
[0082] Если новая конфигурация не была получена, процесс переходит к этапу, где выполняется проверка того, прошло ли достаточно времени, чтобы информация о местоположении и состоянии должна быть отправлена в NOC 320. Если это так, информация о местоположении и статусе или сообщение «навигационной цепочки» отправляется в NOC 320. Частота, с которой такие навигационные сообщения отправляются в NOC 320, по меньшей мере в некоторых вариантах осуществления определяется параметрами конфигурации, полученными от NOC 320, причем эти параметры также определяют данные о событии, которые должны быть отправлены в NOC 320 как часть сообщения. По меньшей мере, в некоторых вариантах осуществления сообщение «навигационной цепочки» передается в NOC 320 регулярно, например, один раз в секунду. Кроме того, при необходимости в NOC 320 регулярно отправляется сообщение «Я готов вступить в пелотон».
[0083] В некоторых вариантах реализации осуществляется проверка безопасности сети, которая включает в себя проверку по существу непрерывной надежной связи DSRC, включая каналы, использующие различные протоколы или модальности, такие как, например, LTE, Wi-Fi или пара передатчик/приемник модулированного сигнала. Методы измерения расстояния от передней части заднего транспортного средства до задней части переднего транспортного средства, которые не зависят от DSRC, могут включать радар, камеру, лидар и ультразвук. Приведение в действие тормоза передним ТС может быть обнаружено независимо от DSRC с помощью камеры, установленной в передней части следующего за ним автомобиля. В варианте осуществления, если обнаружена проблема со связью DSRC, объединение в пелотон отключается до тех пор, пока проблема со связью не будет решена. Таким образом, либо пелотон не может быть задействован, либо, если он уже занят, пелотон будет распущен. Специалистам в данной области техники должно быть понятно, что в некоторых вариантах осуществления будет реализовано множество каналов связи, и в этом случае отказ одного или нескольких, но при этом еще достаточно работоспособных, чтобы гарантировать точность, не приведет к отключению пелотона. Процесс проверки связи включает в себя один или несколько этапов, а в некоторых случаях все из: (а) измерение времени, прошедшего с момента последнего принятого сообщения, и сравнение с ожидаемым временем между сообщениями; (b) проверка идентификатора и содержимого сообщения; (c) определение того, превышает ли уровень шума канала связи заданный порог. Отказ любого из трех останавливает дальнейший пелотон.
[0084] Движение в пелотоне позволяет самоуправляемым ТС экономить значительную часть энергии за счёт движения в аэродинамической тени других ТС, как показано на Фиг. 5; сопротивление воздуха в общей группе гораздо ниже (вплоть до 40 %).
[0085] В некоторых вариантах реализации сэкономленную энергию (топливо или электроэнергию) могут использовать для распределения фиатных средств между участниками пелотона пропорционально затраченной энергии и позиции в пелотоне.
[0086] В некоторых вариантах реализации пелотоны могут взаимодействовать между собой и присоединяться по таким же принципам, как взаимодействуют самоуправляемые ТС, как показано на Фиг. 6.
[0087] Также в некоторых вариантах реализации команды управления отправляются от NOC на самоуправляемые ТС или посредством ретрансляции сигналов [0088] Команды управления могут содержать изменение скорости, маршрута, дистанции между ТС и другие характеристики.
[0089] Сэкономленная энергия в рамках движения пелотона может затем конвертироваться в фиатные средства, топливо, товары и услуги, и так далее.
[0090] В некоторых вариантах реализации пелотон может разъединяться для добавления в него новых участников и/или удаления участников пелотона, которые не выполняют условия нахождения в пелотоне.Чем дальше от лидера пелотона находится ТС, тем эффективнее его движение.
[0091] В некоторых вариантах реализации NOC контролирует характеристики движения пелотона в целом, направляя управляющие сигналы как лидеру группы, так и участникам пелотона, контролируя пелотон.
[0092] Ссылаясь на Фиг. 4, данное техническое решение может быть реализовано в виде вычислительной системы 400 управления группой самоуправляемых транспортных средств, которая содержит один или более из следующих компонентов:
- компонент 401 обработки, содержащий по меньшей мере один процессор402,
- память 403,
- компонент 405 мультимедиа,
- компонент 406 аудио,
- интерфейс 407 ввода / вывода (I / O),
- сенсорный компонент 408,
- компонент 409 передачи данных.
[0093] Компонент 401 обработки в основном управляет всеми операциями системы 400, например, осуществляет обработку данных о пользователе или его запросе, а также управляет дисплеем, телефонным звонком, передачей данных, работой камеры и операцией записи мобильного устройства связи.
Компонент 401 обработки может включать в себя один или более процессоров 402, реализующих инструкции для завершения всех или части шагов из указанных выше способов. Кроме того, компонент 401 обработки может включать в себя один или более модулей для удобного процесса взаимодействия между другими модулями 401 обработки и другими модулями.
Например, компонент 401 обработки может включать в себя мультимедийный модуль для удобного облегченного взаимодействия между компонентом 405 мультимедиа и компонентом 401 обработки.
[0094] Память 403 выполнена с возможностью хранения различных типов данных для поддержки работы системы 400, например, базу данных с профилями пользователей. Примеры таких данных включают в себя инструкции из любого приложения или способа, контактные данные, данные адресной книги, сообщения, изображения, видео, и т. д., и все они работают на системе 400.
Память 403 может быть реализована в виде любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, статического оперативного запоминающего устройства (СОЗУ), Электрически-Стираемого Программируемого постоянного запоминающего устройства (ЭСППЗУ), Стираемого Программируемого постоянного запоминающего устройства (СППЗУ), Программируемого постоянного запоминающего устройства (ППЗУ), постоянного запоминающего устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного диска или оптического диска и другого, не ограничиваясь.
[0095] Компонент 405 мультимедиа включает в себя экран, обеспечивающий выходной интерфейс между системой 400, которая может быть установлена на мобильном устройстве связи пользователя и пользователем. В некоторых вариантах реализации, экран может быть жидкокристаллическим дисплеем (ЖКД) или сенсорной панелью (СП). Если экран включает в себя сенсорную панель, экран может быть реализован в виде сенсорного экрана для приема входного сигнала от пользователя. Сенсорная панель включает один или более сенсорных датчиков в смысле жестов, прикосновения и скольжения по сенсорной панели. Сенсорный датчик может не только чувствовать границу прикосновения субъекта или жест перелистывания, но и определять длительность времени и давления, связанных с режимом работы на прикосновение и скольжение. В некоторых вариантах осуществления компонент 405 мультимедиа включает одну фронтальную камеру и/или одну заднюю камеру. Когда система 400 находится в режиме работы, например, режиме съемки или режиме видео, фронтальная камера и/или задняя камера могут получать данные мультимедиа извне. Каждая фронтальная камера и задняя камера может быть одной фиксированной оптической системой объектива или может иметь фокусное расстояние или оптический зум.
[0096] Компонент 406 аудио выполнен с возможностью выходного и/или входного аудио сигнала. Например, компонент 406 аудио включает один микрофон (MIC), который выполнен с возможностью получать внешний аудио сигнал, когда система 400 находится в режиме работы, например, режиме вызова, режима записи и режима распознавания речи. Полученный аудио сигнал может быть далее сохранен в памяти 403 или направлен по компоненту 409 передачи данных. В некоторых вариантах осуществления компонент 406 аудио также включает в себя один динамик выполненный с возможностью вывода аудио сигнала.
[0097] Интерфейс 407 ввода / вывода (I / O) обеспечивает интерфейс между компонентом 401 обработки и любым периферийным интерфейсным модулем.
Вышеуказанным периферийным интерфейсным модулем может быть клавиатура, руль, кнопка, и т. д. Эти кнопки могут включать, но не ограничиваясь, кнопку запуска, кнопку регулировки громкости, начальную кнопку и кнопку блокировки.
[0098] Сенсорный компонент 408 содержит один или более сенсоров и выполнен с возможностью обеспечения различных аспектов оценки состояния системы 400. Например, сенсорный компонент 408 может обнаружить состояния вкл/выкл системы 400, относительное расположение компонентов, например, дисплея и кнопочной панели, одного компонента системы 400, наличие или отсутствие контакта между субъектом и системой 400, а также ориентацию или ускорение/замедление и изменение температуры системы 400. Сенсорный компонент 408 содержит бесконтактный датчик, выполненный с возможностью обнаружения присутствия объекта, находящегося поблизости, когда нет физического контакта. Сенсорный компонент 408 содержит оптический датчик (например, КМОП или ПЗС-датчик изображения) выполненный с возможностью использования в визуализации приложения. В некоторых вариантах сенсорный компонент 408 содержит датчик ускорения, датчик гироскопа, магнитный датчик, датчик давления или датчик температуры.
[0099] Компонент 409 передачи данных выполнен с возможностью облегчения проводной или беспроводной связи между системой 400 и другими устройствами. Система 400 может получить доступ к беспроводной сети на основе стандарта связи, таких как WiFi, 2G, 3G, 5G, или их комбинации. В одном примерном варианте компонент 409 передачи данных получает широковещательный сигнал или трансляцию, связанную с ними информацию из внешней широковещательной системы управления через широковещательный канал. В одном варианте осуществления компонент 409 передачи данных содержит модуль коммуникации ближнего поля (NFC), чтобы облегчить ближнюю связь. Например, модуль NFC может быть основан на технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосных (UWB) технологии, Bluetooth (BT) технологии и других технологиях.
[00100] В примерном варианте осуществления система 400 может быть реализована посредством одной или более Специализированных Интегральных Схем (СИС), Цифрового Сигнального Процессора (ЦСП), Устройств Цифровой Обработки Сигнала (УЦОС), Программируемым Логическим Устройством (ПЛУ), логической микросхемой, программируемой в условиях эксплуатации (ППВМ), контроллера, микроконтроллера, микропроцессора или других электронных компонентов, и может быть сконфигурирован для реализации способа 500 осуществления умного поиска авиабилетов.
[00101] В примерном варианте осуществления энергонезависимый машиночитаемый носитель содержит память 403, которая включает инструкции, где инструкции выполняются процессором 401 системы 400 для реализации описанных выше способов осуществления способа управления группой самоуправляемых транспортных средств. Например, энергонезависимым машиночитаемым носителем может быть ПЗУ, оперативное запоминающее устройство (ОЗУ), компакт-диск, магнитная лента, дискеты, оптические устройства хранения данных и тому подобное.
[00102] Вычислительная система 400 может включать в себя интерфейс дисплея, который передает графику, текст и другие данные из коммуникационной инфраструктуры (или из буфера кадра, не показан) для отображения на компоненте 405 мультимедиа. Вычислительная система 400 дополнительно включает в себя устройства ввода или периферийные устройства. Периферийные устройства могут включать в себя одно или несколько устройств для взаимодействия с мобильным устройством связи пользователя, такие как клавиатура, микрофон, носимое устройство, камера, один или более звуковых динамиков и другие датчики. Периферийные устройства могут быть внешними или внутренними по отношению к мобильному устройству связи пользователя. Сенсорный экран может отображать, как правило, графику и текст, а также предоставляет пользовательский интерфейс (например, но не ограничиваясь ими, графический пользовательский интерфейс (GUI)), через который субъект может взаимодействовать с мобильным устройством связи пользователя, например, получать доступ и
взаимодействовать с приложениями, запущенными на устройстве.
[00103] Элементы заявляемого технического решения находятся в функциональной взаимосвязи, а их совместное использование приводит к созданию нового и уникального технического решения. Таким образом, все блоки функционально связаны.
[00104] Все блоки, используемые в системе, могут быть реализованы с помощью электронных компонент, используемых для создания цифровых интегральных схем, что очевидно для специалиста в данном уровне техники. Не ограничиваюсь, могут использоваться микросхемы, логика работы которых определяется при изготовлении, или программируемые логические интегральные схемы (ПЛИС), логика работы которых задаётся посредством программирования. Для программирования используются программаторы и отладочные среды, позволяющие задать желаемую структуру цифрового устройства в виде принципиальной электрической схемы или программы на специальных языках описания аппаратуры: Verilog, VHDL, AHDL и др.
Альтернативой ПЛИС могут быть программируемые логические контроллеры (ПЛК), базовые матричные кристаллы (БМК), требующие заводского производственного процесса для программирования; ASIC - специализированные заказные большие интегральные схемы (БИС), которые при мелкосерийном и единичном производстве существенно дороже.
[00105] Обычно, сама микросхема ПЛИС состоит из следующих компонент:
- конфигурируемых логических блоков, реализующих требуемую логическую функцию;
- программируемых электронных связей между конфигурируемыми логическими блоками;
- программируемых блоков ввода/вывода, обеспечивающих связь внешнего вывода микросхемы с внутренней логикой.
[00106] Также блоки могут быть реализованы с помощью постоянных запоминающих устройств.
[00107] Таким образом, реализация всех используемых блоков достигается стандартными средствами, базирующимися на классических принципах реализации основ вычислительной техники.
[00108] Как будет понятно специалисту в данной области техники, аспекты настоящего технического решения могут быть выполнены в виде системы, способа или компьютерного программного продукта. Соответственно, различные аспекты настоящего технического решения могут быть реализованы исключительно как аппаратное обеспечение, как программное обеспечение (включая прикладное программное обеспечение и так далее) или как вариант осуществления, сочетающий в себе программные и аппаратные аспекты, которые в общем случае могут упоминаться как «модуль», «система» или «архитектура». Кроме того, аспекты настоящего технического решения могут принимать форму компьютерного программного продукта, реализованного на одном или нескольких машиночитаемых носителях, имеющих машиночитаемый программный код, который на них реализован.
[00109] Также может быть использована любая комбинация одного или нескольких машиночитаемых носителей. Машиночитаемый носитель хранилища может представлять собой, без ограничений, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, аппарат, устройство или любую подходящую их комбинацию. Конкретнее, примеры (неисчерпывающий список) машиночитаемого носителя хранилища включают в себя: электрическое соединение с помощью одного или нескольких проводов, портативную компьютерную дискету; жесткий диск, оперативную память (ОЗУ), постоянную память (ПЗУ), стираемую программируемую постоянную память (EPROM или Flash-память), оптоволоконное соединение, постоянную память на компакт-диске (CD-ROM), оптическое устройство хранения, магнитное устройство хранения или любую комбинацию вышеперечисленного. В контексте настоящего описания, машиночитаемый носитель хранилища может представлять собой любой гибкий носитель данных, который может содержать или хранить программу для использования самой системой, устройством, аппаратом или в соединении с ними.
[00110] Программный код, встроенный в машиночитаемый носитель, может быть передан с помощью любого носителя, включая, без ограничений, беспроводную, проводную, оптоволоконную, инфракрасную и любую другую подходящую сеть или комбинацию вышеперечисленного.
[00111] Компьютерный программный код для выполнения операций для шагов настоящего технического решения может быть написан на любом языке программирования или комбинаций языков программирования, включая объектно-ориентированный язык программирования, например Python, R, Java, Smalltalk, С++ и так далее, и обычные процедурные языки программирования, например язык программирования «С» или аналогичные языки программирования. Программный код может выполняться на компьютере пользователя полностью, частично, или же как отдельный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере, или же полностью на удаленном компьютере. В последнем случае, удаленный компьютер может быть соединен с компьютером пользователя через сеть любого типа, включая локальную сеть (LAN), глобальную сеть (WAN) или соединение с внешним компьютером (например, через Интернет с помощью Интернет-провайдеров).
[00112] Аспекты настоящего технического решения были описаны подробно со ссылкой на блок-схемы, принципиальные схемы и/или диаграммы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления настоящего технического решения. Следует иметь в виду, что каждый блок из блок-схемы и/или диаграмм, а также комбинации блоков из блок-схемы и/или диаграмм, могут быть реализованы компьютерными программными инструкциями. Эти компьютерные программные инструкции могут быть предоставлены процессору компьютера общего назначения, компьютера специального назначения или другому устройству обработки данных для создания процедуры, таким образом, чтобы инструкции, выполняемые процессором компьютера или другим программируемым устройством обработки данных, создавали средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или диаграммы.
[00113] Эти компьютерные программные инструкции также могут храниться на машиночитаемом носителе, который может управлять компьютером, отличным от программируемого устройства обработки данных или отличным от устройств, которые функционируют конкретным образом, таким образом, что инструкции, хранящиеся на машиночитаемом носителе, создают устройство, включающее инструкции, которые осуществляют функции/действия, указанные в блоке блок-схемы и/или диаграммы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ПСЕВДОНАВИГАЦИОННОЙ ПОМОЩИ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2695037C1 |
| СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ПОТОКА ДВИЖЕНИЯ ТРАНСПОРТА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2704758C2 |
| ГОЛОВНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ДЛЯ ПОМОЩИ НА ПЕРЕКРЕСТКАХ С ИСПОЛЬЗОВАНИЕМ СПЕЦИАЛИЗИРОВАННОЙ СВЯЗИ НА КОРОТКИХ РАССТОЯНИЯХ | 2017 |
|
RU2711036C2 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЕ ЗАГОТОВКИ | 2015 |
|
RU2696649C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПАССАЖИРСКОГО ДРОНА В ГОРНОЙ МЕСТНОСТИ | 2018 |
|
RU2681278C1 |
| СПОСОБЫ И СИСТЕМЫ ОБЕСПЕЧЕНИЯ ДАННЫХ СКАНИРОВАНИЯ ДЛЯ ПРИНЯТИЯ РЕШЕНИЙ САМОУПРАВЛЯЕМЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2020 |
|
RU2795345C1 |
| СИСТЕМА ОПОЗНАВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2500036C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ МАРШРУТА НА ОСНОВАНИИ ТЕЛЕМАТИЧЕСКОГО СКОРИНГА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2023 |
|
RU2814789C1 |
| ВЫЯВЛЕНИЕ ГЛУБИНЫ ВОДЫ ДЛЯ ПЛАНИРОВАНИЯ И ОТСЛЕЖИВАНИЯ МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2686159C2 |
Изобретение относится к способам управления группой самоуправляемых транспортных средств. Способ управления группой самоуправляемых транспортных средств, выполняемый посредством вычислительного устройства и включающий следующие шаги: осуществляют от одной беспроводной точки доступа, находящейся на самоуправляемом транспортном средстве, широковещательную рассылку пакетов данных, с данными о своем маршруте и запрос на формирование пелотона самоуправляемых ТС, получают положительный ответ от самоуправляемого ТС с намерением формирования пелотона самоуправляемых ТС. Причем маршрут данного ТС совпадает с маршрутом самоуправляемого ТС, направившего запрос на формирование пелотона, формируют посредством вычислительного устройства пелотон самоуправляемых ТС, имеющих совпадающий маршрут, направляют команды управления от самоуправляемого ТС, идущего в пелотоне первым, к самоуправляемому ТС, следующему за первым самоуправляемым ТС для движения в пелотоне. Достигается повышение энергоэффективности транспортных средств. 11 з.п. ф-лы, 6 ил.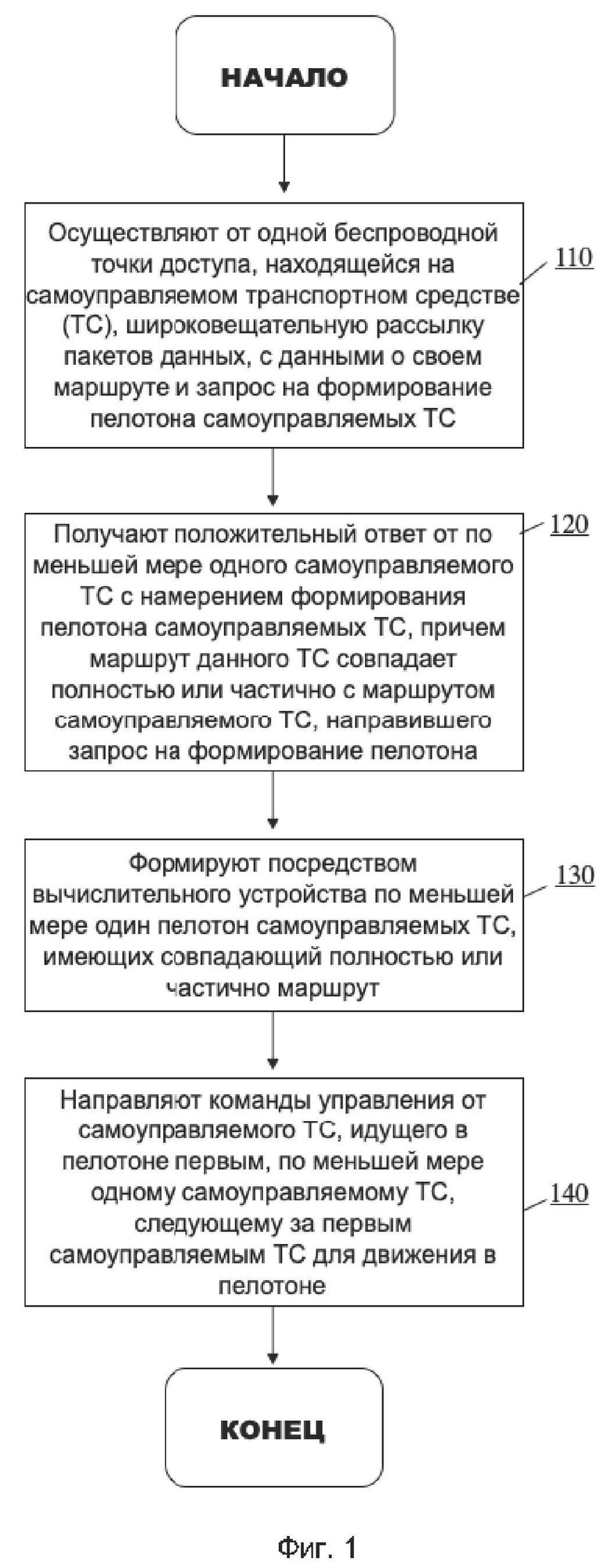
1. Способ управления группой самоуправляемых транспортных средств, выполняемый посредством по меньшей мере одного вычислительного устройства и включающий следующие шаги:
осуществляют от одной беспроводной точки доступа, находящейся на самоуправляемом транспортном средстве (ТС), широковещательную рассылку пакетов данных, с данными о своем маршруте и запрос на формирование пелотона самоуправляемых ТС;
получают положительный ответ от по меньшей мере одного самоуправляемого ТС с намерением формирования пелотона самоуправляемых ТС, причем маршрут данного ТС совпадает полностью или частично с маршрутом самоуправляемого ТС, направившего запрос на формирование пелотона;
формируют посредством вычислительного устройства по меньшей мере один пелотон самоуправляемых ТС, имеющих совпадающий полностью или частично маршрут;
направляют команды управления от самоуправляемого ТС, идущего в пелотоне первым, по меньшей мере одному самоуправляемому ТС, следующему за первым самоуправляемым ТС для движения в пелотоне.
2. Способ по п. 1, характеризующийся тем, что транспортное средство включает в себя набор видеокамер и/или набор устройств взвешивания, и/или набор датчиков подвески, и/или набор датчиков обнаружения света и дальности (LIDAR), и/или набор ультразвуковых датчиков, и/или набор датчиков определения местоположения, и/или набор радиочастотных датчиков.
3. Способ по п. 1, характеризующийся тем, что вычислительное устройство реализовано в виде блока управления двигателем транспортного средства, и/или центрального процессора транспортного средства, и/или автомобильного, и/или планшета, и/или персонального компьютера, встроенного в транспортное средство.
4. Способ по п. 1, характеризующийся тем, что вычислительное устройство постоянно связано или не связано с транспортным средством.
5. Способ по п. 1, характеризующийся тем, что широковещательная рассылка пакетов осуществляется с помощью технологии DSRC.
6. Способ по п. 1, характеризующийся тем, что при широковещательной рассылке пакетов данных запрос на формирование пелотона самоуправляемых ТС, двигающегося по трассе или шоссе, содержит координаты ТС, и/или маршрут пелотона, и/или стоимость движения в пелотоне.
7. Способ по п. 1, характеризующийся тем, что, когда самоуправляемое ТС проезжает в зоне действия антенны другого самоуправляемого ТС для формирования пелотона, транспондер выходит в активный режим, устанавливает соединение и производит обмен информацией.
8. Способ по п. 5, характеризующийся тем, что дополнительно используют динамическую маршрутизацию для построения одноранговых сетей, и/или сетей DTN, и/или глобального геопозиционирования ГЛОНАСС/GPS.
9. Способ по п. 1, характеризующийся тем, что вычислительное устройство, находящееся в самоуправляемом ТС, содержит модуль безопасности.
10. Способ по п. 1, характеризующийся тем, что каждое самоуправляемое ТС содержит модуль безопасности (REDCR), который используется для расшифровки и проверки целостности данных, исходящих из вычислительного устройства, осуществляющего широковещательную рассылку пакетов данных, с данными о своем маршруте и запрос на формирование пелотона самоуправляемых ТС.
11. Способ по п. 1, характеризующийся тем, что самоуправляемое ТС осуществляет передачу данных с центром управления сетью (NOC).
12. Способ по п. 11, характеризующийся тем, что в случаях, когда связь с NOC недоступна в течение определенного периода времени, осуществляется вариант осуществления ячеистой сети, посредством которой сообщения передаются между NOC и транспортным средством через промежуточные транспортные средства.
| Устройство управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе применения многосвязной адаптивной системы управления | 2020 |
|
RU2753778C1 |
| US 9606539 B1, 28.03.2017 | |||
| ВЗАИМОДЕЙСТВИЕ МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ ДЛЯ УПОРЯДОЧИВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ | 2017 |
|
RU2674744C1 |

