ОБЛАСТЬ ТЕХНИКИ
[001] Данное техническое решение в общем относится к области беспилотной навигации в вычислительной технике, а в частности к системам и способам навигации пассажирских дронов в горной местности.
УРОВЕНЬ ТЕХНИКИ
[002] В настоящее время каждый горнолыжный курорт для удобства спортсменов и любителей имеет специальное оборудование - подъемник горнолыжный. С его помощью туристы могут подняться на вершину горы, а также спуститься с нее. Это экономит время для развития навыков спуска на лыжах, сноубордах и санях. Необходимо заметить, что подъемники на горнолыжных трассах бывают нескольких типов: воздушные (в них турист поднимается на гору сидя на скамейке, или в кабинке, которые перемещаются по тросу с отрывом от земной поверхности); наземные (горнолыжник или сноубордист скользит по поверхности земли, держась руками за крепление, или сидя на специальной тарелке).
[003] Однако большим минусом известных из уровня техники подъемников является то, что они ограничены по маршруту, и движутся от точки до точки по одному и тому же маршруту. Данная особенность подъемников приносит большие неудобства людям, которые занимаются так называемым фрирайдом (катание на сноуборде или горных лыжах вне подготовленных трасс) и вынуждены в основном кататься вдоль подготовленных трасс. Дополнительно, лавинщики, осуществляющие поиск людей при сходе лавин, вынуждены проводить поиск людей поднимаясь пешком к месту схода лавины, теряя время, которое может спасти человеческую жизнь.
[004] В настоящее время технологии, связанные с пассажирскими дронами, становятся доступными для широкого рынка и не требуют вмешательства человека. Все алгоритмы машинного обучения, датчики и системы безопасности с тем же успехом можно применять для пассажирских дронов. В сравнении с автомобилями дроны встречают на своем пути гораздо меньше препятствий и в то же время имеют намного больше вариантов для предотвращения аварий. Летающий пассажирский дрон отличается легким весом, компактными габаритами и возможностью дистанционного управления.
[005] Однако позиционирование пассажирского дрона в горной местности усложняется высокой изменчивостью рельефа и из-за снега. Ориентироваться, составляя карты местности на основе снимков достаточно сложно на белом снегу, к тому же сложности добавляет наличие сугробов, лесных награждений на скалистой местности и т.д.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[006] Данное техническое решение направлено на устранение недостатков, свойственных решениям, известным из уровня техники.
[007] Технической задачей или, другими словами, технической проблемой, решаемой в данном техническом решении, является реализация способа и системы для навигации пассажирского дрона в горной местности.
[008] Техническим результатом, достигаемым при решении вышеуказанной технической задачи, является повышение точности и скорости навигации пассажирского дрона в горной местности.
[009] Дополнительным техническим результатом является повышение безопасности навигации пассажирского дрона в горной местности за счет синхронизации между несколькими пассажирскими дронами.
[0010] Указанный технический результат достигается благодаря осуществлению способа навигации пассажирского дрона в горной местности, в котором получают карту горной местности, загруженную в памяти по меньшей мере одного пассажирского дрона, имеющего набор датчиков; передают в режиме реального времени посредством набора активных радиометок сигналы, включающие в себя информацию об их местоположении с привязкой к топографии местности по меньшей мере одному пассажирского дрону; получают посредством приемника пассажирского дрона сигналы от активных радиометок, находящихся на доступном расстоянии приемника пассажирского дрона; осуществляют позиционирование по меньшей мере одного дрона на основании карты горной местности, сигналов активных радиометок и данных набора датчиков пассажирского дрона посредством устройства обработки данных; формируют по меньшей мере один маршрут по меньшей мере одного пассажирского дрона на основании позиционирования, определенного на предыдущем шаге, причем учитывают позиционирование и маршруты других дронов.
[0011] В некоторых вариантах осуществления изобретения активной радиометкой является GPS-маяк и/или iBeacon-маяк.
[0012] В некоторых вариантах осуществления изобретения дрон имеет камеру и/или лидар, и/или сонар.
[0013] В некоторых вариантах осуществления изобретения при формировании карты горной местности на основании сигналов активных радиометок устройство обработки данных находится на пассажирском дроне.
[0014] В некоторых вариантах осуществления изобретения при формировании карты горной местности на основании сигналов активных радиометок устройство обработки данных находится удаленно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Признаки и преимущества настоящего технического решения станут очевидными из приведенного ниже подробного описания и прилагаемых
чертежей, на которых:
[0016] На Фиг. 1 показан пример осуществления способа навигации пассажирского дрона в горной местности в виде блок-схемы;
[0017] На Фиг. 2 показан пример осуществления пассажирского дрона;
[0018] На Фиг. 3 показан пример осуществления системы навигации пассажирского дрона в горной местности;
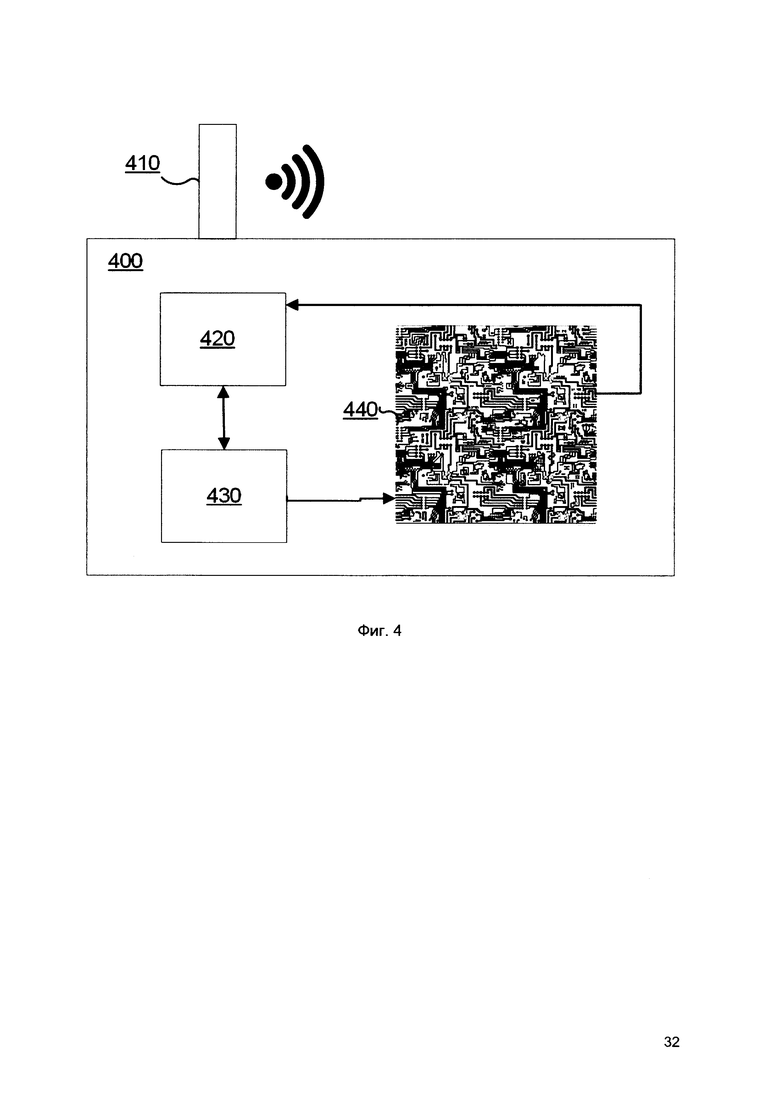
[0019] На Фиг. 4 показан вариант осуществления радиометки, излучающей сигналы для позиционирования дрона;
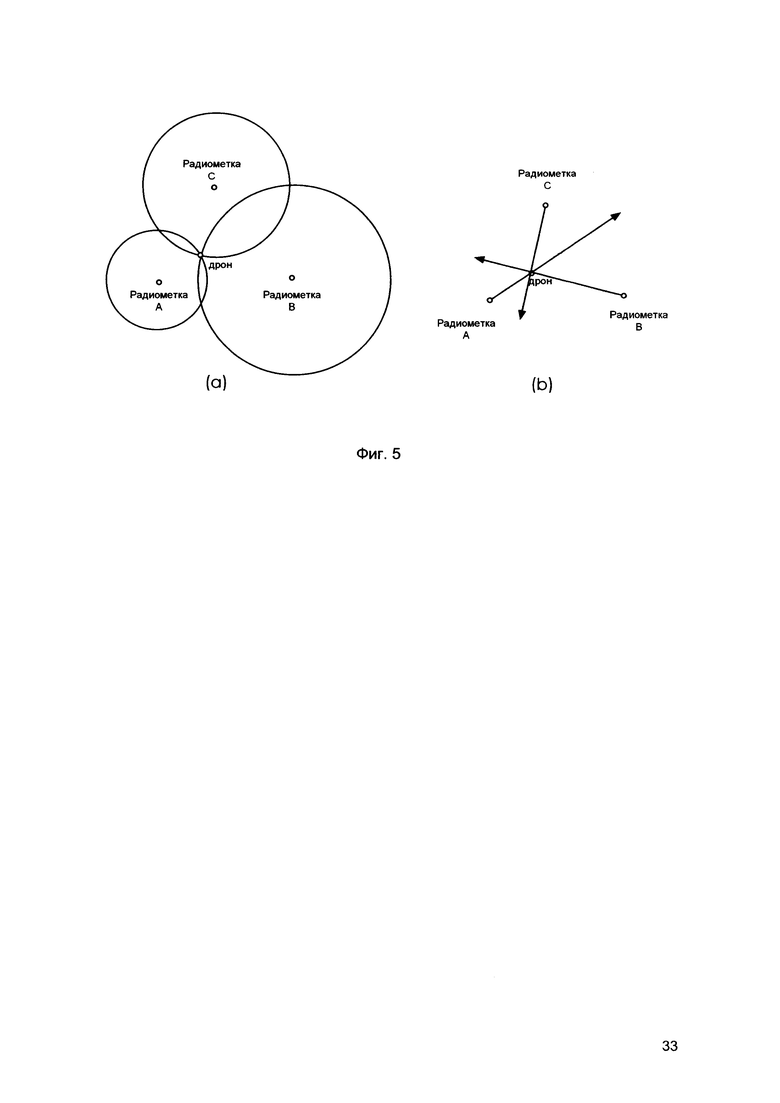
[0020] На Фиг. 5 показан пример осуществления позиционирования дрона посредством триангуляции.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0021] Данное техническое решение может быть реализовано на компьютере или другом устройстве обработки данных, в виде автоматизированной системы или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа.
[0022] Техническое решение может быть реализовано в виде распределенной компьютерной системы, компоненты которой являются облачными или локальными серверами.
[0023] В данном решении под системой подразумевается компьютерная система или автоматизированная система (АС), ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированная система управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность вычислительных операций (действий, инструкций).
[0024] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
[0025] Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы, облачные хранилища данных.
[0026] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[0027] Дрон (от англ. drone - «трутень») - беспилотный летательный аппарат (БПЛА).
[0028] Цифровая карта (цифровая карта местности) - цифровая модель местности, созданная путем цифрования картографических источников, фотограмметрической обработки данных дистанционного зондирования, цифровой регистрации.
[0029] Данное изобретение может использоваться не только для горнолыжников, но и для подъема обычных людей, например, в шале на вершине горы, туристов по горным тропам и т.п.
[0030] Способ навигации пассажирского дрона в горной местности, показанный в виде блок-схемы на Фиг. 1, включает следующие шаги.
[0031] Шаг 101: получают карту горной местности, загруженную в памяти по меньшей мере одного пассажирского дрона, имеющего набор датчиков.
[0032] Пассажирский дрон или другими словами беспилотный летательный аппарат (БПЛА), который показан на Фиг. 2, в некоторых вариантах реализации может содержать следующие различные варианты пассажирских сидений: пассажиры сидят бок о бок или последовательно друг за другом. Кабина дрона может содержать дополнительный соседний отсек для багажа, который может быть как открытым (например, отсеки для горных лыж или сноуборда), так и закрытым. Данный дополнительный отсек можно использовать при наклоне/повороте дрона для крепления багажа, закрепляя багаж ремнями, которые имеют соответствующую функцию для обеспечения безопасности багажа. Расположение пассажирских мест спроектировано таким образом, чтобы у каждого пассажира был доступ к выходу.
[0033] Пассажирский дрон, показанный на Фиг. 2 может быть выполнен из углеродного волокна, что делает дрон легким и одновременно невероятно прочным.
[0034] Пассажирский дрон может содержать следующий набор датчиков:
• МЭМС-датчики и инерционные модули датчиков,
• датчики параметров окружающей среды,
• датчики приближения,
• беспроводные приемопередатчики субгигагерцевого диапазона, модули Bluetooth и Wi-Fi,
• микросхемы для систем глобального позиционирования (GPS/Galileo/Glonass/Beidou2/QZSS).
[0035] Пассажирский дрон из-за наличия на борту пассажира имеет погрешности в распределении веса и разброс в характеристиках двигателей. Это приводит к тому, что в процессе полета дрон может отклоняться от положения равновесия. Компенсацию этих отклонений осуществляют за счет изменения тяги двигателя, но такое решение требует точного определения крена, тангажа и рыскания. Для измерения перечисленных угловых координат используют инерционные модули датчиков и МЭМС-датчики. Инерционные модули датчиков могут представлять собой комбинацию, например, из 3-осевого акселерометра и 3-осевого гироскопа (некоторые модели пассажирских дронов имеют в своем составе и 3-осевой магнитометр). Такая комбинация является идеальным вариантом для пассажирского дрона. 6-осевой или 9-осевой инерционный модуль датчиков может быть выполнен с широким диапазоном измерений (например, ±2/±4/±8/±16 g для акселерометра и ±125/±245/±500/±1000/±2000°/с для гироскопа) и минимальным потреблением: 0,65 мА в активном состоянии и всего 4,5 мкА в спящем режиме. Инерционный модуль датчиков может быть настроен на генерирование сигналов прерываний по событиям: обнаружения свободного падения; изменения ориентации по одной из шести осей; обнаружению одиночной или двойной вибрации; по наличию или отсутствию перемещения.
[0036] Информация о состоянии параметров окружающей среды имеет важное значение для обеспечения безопасности пассажирского дрона. В данном изобретении могут использовать комбинированный датчик влажности и температуры. Его главными преимуществами являются высокая разрядность для обоих сенсоров (16 бит), малые габариты (2×2×0,9 мм), отличная точность и малое потребление. Питающий ток при частоте опроса 1 Гц составляет всего 2 мкА, а в режиме сна падает до 0,5 мкА.
[0037] Датчик определения расстояния, содержащийся в пассажирском дроне, определяет расстояние до объекта по времени распространения светового потока от передатчика к приемнику. Чем ближе объект, тем меньше времени требуется свету, чтобы преодолеть расстояние. При этом его амплитуда не играет решающей роли. В результате датчик способен не только определять наличие или отсутствие объекта, но и измерять расстояние до него, вне зависимости от световых потерь на поглощение и рассеивание. Это приводит к тому, что перечень детектируемых движений существенно расширяется. Датчик определения расстояния до объекта представляет собой законченную систему, включающую датчик приближения (Proximity sensor), датчик освещенности (Ambient Light Sensor), излучатель (light source), ОЗУ и ПЗУ, микроконтроллер. Данный датчик способен определять расстояние до объектов с высокой точностью вне зависимости от характеристик объекта, а также измерять освещенность в широком динамическом диапазоне. ИК-излучатель создает мощные одиночные световые импульсы. С одной стороны, это позволяет определять время пролета с высокой точностью, а с другой - увеличивает максимальное измеряемое расстояние.
[0038] Датчик определения расстояния может использовать семь режимов измерений:
[0039] одиночные измерения расстояния (Range single-shot);
[0040] одиночные измерения освещенности (ALS single-shot);
[0041] непрерывные измерения расстояния (Range continuous);
[0042] непрерывные измерения освещенности (ALS continuous);
[0043] непрерывные измерения расстояния и одиночные измерения освещенности (Range continuous and ALS single-shot);
[0044] одиночные измерения расстояния и непрерывные измерения освещенности (Range single-shot and ALS continuous);
[0045] непрерывные измерения расстояния и освещенности (Range Continuous and ALS Continuous).
[0046] Модули Bluetooth и Wi-Fi представляют собой законченные системы для построения узлов беспроводных сетей с поддержкой стека TCP/IP, серверных функций и протоколов безопасности SSI/TLS. При этом все протоколы передачи данных являются встроенными и не требуют от дополнительного сложного конфигурирования.
[0047] В некоторых вариантах осуществления используют тепловизионный датчик с гиростабилизацией. Датчик обеспечивает максимально точное измерение температуры окружающей среды и отдельных объектов, на которые он наведен, что делает его полезным для аналитики и телеметрии. Тепловизионный датчик раскрывает детали, которые нельзя увидеть невооруженным глазом, направляя дрону изображение для анализа, которое отражает даже незначительные изменения температуры. Это позволяет использовать данный датчик при обнаружении повреждений оборудования или зданий, местонахождения пропавших людей и при решении других задач. Для лучшего эффекта пассажирский дрон может содержать сразу два подвеса: один с тепловизионным датчиком, а второй с обычной камерой.
[0048] Полученная на пассажирском дроне карта горной местности является цифровой картой местности, которая может храниться в специальном формате, принятом в RPS. В состав RPS входят вспомогательные программы для преобразования цифровых карт из форматов MAPINFO и PLANET в формат RPS.
[0049] Цифровая карта может включать в себя следующие компоненты: набор растровых листов карты, содержащих для каждой точки информацию о высоте над уровнем моря и типе местности; набор векторных файлов, описывающих линейные объекты: реки, дороги, линии электропередачи и т.п.; набор файлов с надписями, размещаемыми на карте: названия населенных пунктов, рек, объектов и т.п.; описание карты: размер листа, масштаб, координаты листов карты, тип проекции, в которой получена карта.
[0050] В некоторых вариантах осуществления цифровая карта местности является трехмерной. Также в данном изобретении допускается применение различных цифровых классификаторов, которые позволяют объединить в рамках единого окна электронной цифровой карты горной местности данные различной тематики, размещенные в различных местах памяти. В некоторых вариантах реализации изобретения используется управление составом слоев, объектов и атрибутов, формирование палитры и шрифтов, создание и редактирование внешнего вида условных обозначений для 2D и 3D отображения пространственных данных предварительно в устройстве обработки данных. Для визуализации пространственных данных по унифицированным протоколам OGC WFS классификатор интегрируется со схемой пространственных данных в формате XSD. В некоторых вариантах осуществления цифровая карта местности может отображаться в графическом интерфейсе пользователя на дисплее в пассажирском дроне.
[0051] Память пассажирского дрона может быть выполнена с возможностью хранения различных типов данных для поддержки работы дрона. Примеры таких данных включают в себя инструкции для любого приложения или способа, работающего в дроне, контактные данные пользователей, данные адресной книги, сообщения, изображения, видео, и т.д. Память может быть реализована в виде любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, Статического Оперативного Запоминающего Устройства (СОЗУ), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (ЭСППЗУ), Стираемого Программируемого Постоянного Запоминающего Устройства (СППЗУ), Программируемого Постоянного Запоминающего Устройства (ППЗУ), Постоянного Запоминающего Устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного или оптического диска.
[0052] Шаг 102: передают в режиме реального времени посредством набора активных радиометок сигналы, включающие в себя информацию об их местоположении с привязкой к топографии местности по меньшей мере одному пассажирского дрону.
[0053] Любое решение на основе радиочастотной идентификации состоит из трех основных компонентов:
[0054] - радиометка - средство маркировки отслеживаемых объектов;
[0055] - устройство чтения и записи таких радиометок;
[0056] - серверное и клиентское программное обеспечение, установленное например непосредственно на пассажирском дроне, которое расшифровывает полученную со считывателей информацию и представляет ее в формате, подходящем для систем управления.
[0057] В данном техническом решении радиометка, установленная на объектах в горной местности и ридер (иногда употребляется в уровне техники термин устройство чтения или считыватель, считывающее устройство), установленный на дроне, содержат антенну и микросхему, в которой находится приемник, передатчик и память с информацией о данных каждой радиометки.
[0058] В некоторых вариантах осуществления радиометка 310 может быть установлена на опорах воздушной линии электропередачи в горной местности, как это показано на Фиг. 3, на деревьях, сторожках, каменных элементах и т.д. Способ крепления радиометки к данным объектам также может быть любым общеизвестным из уровня техники.
[0059] Каждая радиометка 400, как показано на Фиг. 4, может содержать: антенну 410, модулятор 420 импеданса, выпрямитель 430 ВЧ тока и электронную схему 440 с генератором случайных сигналов, обеспечивающих случайный период повторения считываемого кода радиометки 400. Антенна 410, модулятор 420 и выпрямитель 430 соединены параллельно. Выход выпрямителя 430 соединен с входом электронной схемы 440, а ее управляющий выход соединен с управляющим входом модулятора 420.
[0060] Микросхема 440 содержит все упомянутые электронные компоненты радиометки, необходимые для ее функционирования. Может быть использована, например, микросхема ЕМ4123 (ЕМ Microelectronic-Marin SA).
[0061] Модулятор 420 импеданса микросхемы 440 представляет собой переменный резистор, сопротивление которого изменяется в такт с величиной управляющего кодового сигнала электронной схемы. Модулятор 420 может быть подключен параллельно входу микросхемы 440, поэтому изменение его сопротивления приводит к изменению импеданса микросхемы и, следовательно, к изменению коэффициента отражения сигнала от антенны 410 в такт с напряжением кодового идентификационного сигнала радиометки 400. В качестве модулятора 420 может использоваться полевой транзистор с изолированным затвором.
[0062] Выпрямитель 430 ВЧ сигнала предназначен для питания электронной схемы 440 и имеет вход ВЧ сигнала и выход сигнала постоянного тока. Он может быть выполнен, например, на основе полупроводниковых диодов с барьером Шоттки.
[0063] В состав электронной схемы 440 радиометки 400 может входить генератор сигналов считывания кода радиометки со случайным периодом повторения, с помощью которого реализуется антиколлизионный протокол, т.е. разрешаются коллизии - наложение сигналов разных радиометок. Согласно методу ALOHA [К. Финкенцеллер. RFID-технологии. Справочное пособие / пер. с нем. - М.: Додэка-XXI, 2010, стр. 238], случайная задержка повторяющихся сообщений - ответных сигналов каждой радиометки, обеспечивает правильное считывание ее кодовых идентификационных сигналов. Электронная схема 440 может быть выполнена на основе микроконтроллера и энергонезависимой памяти.
[0064] В качестве источника питания радиометки может использоваться литиевая батарея CR2450. Она обладает высокой емкостью при относительно малых габаритных размерах. При использовании батареи CR2450 емкостью 600 мАч общее время работы радиометки, составляет около двух лет. Батарея имеет выходное напряжение в ЗВ и рассчитана на малые значения выходного тока, 2 мА, при превышении которого емкость батареи начинает резко падать. Питание приемопередатчика осуществляется от напряжения 5 В, а пиковое потребление тока может составлять до 45 мА. С учетом этих факторов для энергообеспечения радиометки используется специальная электрическая схема. В этой схеме используются конденсаторы, позволяющие накапливать заряд в паузах между отправлением данных и обеспечивающие необходимые значения тока выходного тока в момент передачи.
[0065] В некоторых вариантах осуществления радиометка 400 может быть активной или пассивной. Считывание радиометок осуществляется в поле электромагнитных волн, как это показано на Фиг. 3, которые излучаются приемопередающей антенной ридера, установленного на дроне 300, в направлении радиометок.
[0066] В случае если радиометка является пассивной, сигнал ридера активизирует работу радиометки, находясь на заранее заданном расстоянии от нее. При чтении сигнала радиометки антенна ридера излучает радиосигнал определенной частоты, который принимается антенной радиометки. Энергии радиосигнала достаточно для питания передатчика радиометки и передачи на ридер содержимого памяти радиометки. Поскольку обмен информацией между ридером и радиометкой происходит по радиоканалу, прямой видимости между ними не требуется. В данном техническом решении радиометкой может быть миниатюрный медный антенный контур с припаянной к нему микросхемой, который обычно встроен в корпус из подходящего сорта пластика, металла, дерева и т.д. В некоторых вариантах осуществления электронику радиометки крепят к тонкому полиэтиленовому кольцу или наклеивают на пленку из полиэтилентерефталата. Как известно из уровня техники, пассивная радиометка, чтобы послать отклик ридеру, должна сначала запитать свои схемы энергией радиосигнала ридера. Чтобы сократить время отклика, используют радиометки, которые могут как "маячок" с требуемой периодичностью испускать радиоимпульсы, чтобы ридер, установленный на дроне, уловив их сразу, мог бы послать запрос на чтение.
[0067] В других вариантах осуществления изобретения применяют активные радиометки. Активные радиометки отличаются от пассивных тем, что содержат литиевую батарею, которая обеспечивает дополнительное питание интегральной микросхемы. Таким образом, они принимают и передают информацию на заметно большей дальности, чем пассивные. Диапазоны рабочих частот активных радиометок могут быть следующие: 10…15 МГц; 850…950 МГц; 2,45 ГГц. Объем памяти такой радиометки достигает 2 МБ, а способы записи-считывания данных аналогичны пассивным радиометкам. Срок эксплуатации зависит от срока службы батареи и составляет примерно 3…10 лет. Рабочий диапазон температур обычно -30…+50°С. Активные радиометки могут использоваться с теми же ридерами, что и пассивные. Кроме того, их работа при наличии электромагнитных помех от силового электрооборудования по понятным причинам более устойчива, чем пассивных радиометок.
[0068] В некоторых вариантах реализации изобретения радиометка может быть размещена внутри другого объекта, например, коробки или облицовки столба ЛЭП. Дополнительно, радиометка может быть замаскирована под элементы окружающей среды.
[0069] Перед установкой радиометки на объект идентификации радиометка программируется. Идентификационная информация записывается любым известным способом в генератор кода.
[0070] Радиометки предварительно устанавливают в горной местности на расстояние друг от друга, не превышающее дальность передачи-приема сигнала от радиометки на пассажирский дрон.
[0071] Шаг 103: получают посредством приемника пассажирского дрона сигналы от активных радиометок, находящихся на доступном расстоянии приемника пассажирского дрона.
[0072] Ридер представляет собой комбинацию передатчика и приемника, снабженных антенной, демодулятора и дешифратора принятого от радиометки сигнала и интерфейса с устройством обработки данных. Антенна ридера излучает радиосигналы, которые активизируют радиометку и принимают ответный радиосигнал от нее. Антенны различаются по размерам и форме и могут встраиваться в любое место пассажирского дрона, наиболее удобное для считывания сигналов с радиометок, например на днище дрона. В некоторых вариантах осуществления на дроне находится несколько ридеров. Ридеры работают в непрерывном режиме при считывании большого числа радиометок. Однако если в непрерывном считывании нет необходимости, они включаются только по команде, последовавшей в автоматическом режиме от программного обеспечения дрона или от оператора. Для расширения рабочей зоны обнаружения радиометок может быть применена система из нескольких антенн, подключенных к одному ридеру, работой которого управляет программное обеспечение.
[0073] Ридер дрона улавливает сигнал радиоволн радиометки, после чего ридер соединяется с радиометкой, которая содержит ссылку с информацией на базу данных дрона, в которой отображается информация о данном объекте, и его координаты. При считывании этой радиометки получают следующие поля:
[0074] - код объекта, его тип;
[0075] - координаты данного объекта.
[0076] В некоторых вариантах реализации изобретении географические координаты включают широту, долготу и высоту. Географические координаты одной и той же точки могут быть выражены в разных форматах. В зависимости от того, представлены минуты и секунды как значения от 0 до 60 или от 0 до 100 (десятичные доли).
[0077] Формат координат могут использовать следующим образом: DD -градусы, ММ - минуты, SS - секунды, если минуты и секунды представлены как десятичные доли, то используют DD.DDDD. Например:
[0078] DD MM SS: 50° 40' 45'' в.д., 40 50' 30'' с.ш. - Градусы, минуты, секунды
[0079] DD ММ.ММ: 50° 40.75' в.д., 40 50.5' с.ш. - Градусы, десятичные минуты
[0080] DD.DDDDD: 50.67916 в.д., 40.841666 с.ш. - Десятичные градусы.
[0081] Пример различных форм записи одних и тех же координат:
[0082] 21.36214,-157.95341
[0083] N21.36214, W157.95341
[0084] 21.36214°N, 157.95341°W
[0085] 21°21.728'N, 157°57.205'W
[0086] 21°21'43.7''N, 157°57'12.3''W
[0087] Считывание данных с радиометки происходит автоматически, как только радиометка попадает в радиус действия антенны дрона. Для нее не являются помехой гарь, грязь, высокая или низкая температура или агрессивные среды, картонная или пластиковая упаковка.
[0088] При использовании технологии радиочастотной идентификации доступное расстояние для обмена сигналами может быть в диапазоне от 5 м до 3000 м). В случае превышения верхней границы допустимого диапазона от по меньшей мере одной радиометки, пассажирский дрон может автоматически подключаться к системе глобального позиционирования.
[0089] В некоторых вариантах осуществления данные с радиометки зашифрованы криптографическим алгоритмом с открытым ключом, например, RSA, DSA (Digital Signature Algorithm), Elgamal (шифросистема Эль-Гамаля), Diffie-Hellman и т.д., не ограничиваясь.
[0090] В некоторых вариантах осуществления изобретения для определения расстояния до объектов может использоваться сонар и/или радар, размещенный на днище пассажирского дрона. Сонар (прибор для определения дальности акустическим методом) и радар (прибор для определения дальности радиолокационным методом) работают по одному принципу, определяя местонахождение удаленных объектов. В обоих случаях посылаются невидимые волны, которые отражаются от попадающихся на пути твердых объектов. Время, необходимое для возврата отраженных волн в точку, из которой они были направлены, указывает, на каком расстоянии находятся объекты.
[0091] В радаре для локализации объектов используется определенный тип световых волн - радиоволны. Как и все световые волны, радиоволна распространяется по прямой с постоянной скоростью света - 299274 км/с. В сонаре для локализации объектов используются звуковые волны. Эти волны также распространяются по прямой, но с различными скоростями. Скорости распространения звуковых волн зависят от среды, через которую они проходят.Звук образуется вследствие вибрации объекта, в результате которой начинают вибрировать окружающие молекулы - таким образом звуковые волны приобретают как бы вид цепной реакции.
[0092] Шаг 104: осуществляют позиционирование по меньшей мере одного дрона на основании карты горной местности, сигналов активных радиометок и данных набора датчиков пассажирского дрона посредством устройства обработки данных.
[0093] Позиционирование осуществляется в режиме реального времени. Расстояние от радиометки до приемника дрона с фиксированными координатами определяется по углу направления на радиометки Angle of arrival (АоА), по времени прихода сигнала Time of arrival (ТоА) или по времени распространения сигнала от радиометки до приемника Time-of-flight (ToF).
[0094] В некоторых вариантах осуществления позиционирование осуществляется на основании триангуляции, как показано на Фиг. 5. Триангуляция использует геометрические знания для получения местоположения дрона. Местоположение пассажирского дрона может быть определено либо на основании определенного расстояния до фиксированных известных точек местоположения радиометок, либо на основании угла принятого сигнала от радиометок. На Фиг. 5 показано, как получить местоположение пассажирского дрона на основании информации о расстоянии до радиометки и угла прихода сигнала. Предположим, что у нас есть радиометки А, В и С, которые являются фиксированными в известных положениях. В случае (а), как показано на Фиг. 5, если известно расстояние пассажирского дрона от всех трех радиометок, местоположение точки пассажирского дрона может быть выражено как пересечение трех окружностей. Для случая (b), если известен угол прихода сигналов к точке местоположения пассажирского дрона, находящегося на определенной высоте над поверхностью или угол точки пассажирского дрона к радиометкам, можно легко получить местоположение точки пассажирского дрона путем пересечения трех векторов, а также его высоту. Единственная проблема заключается в том, как получить расстояние или угол от точки пользователя до радиометок.
[0095] В данном техническом решении может использоваться триангуляция на основании угла прихода сигналов радиометок. Это способ получения угла принятого сигнала от известных радиометок для получения местоположения пассажирского дрона. Угол сигнала может быть легко получен, если пассажирский дрон и радиометки используют технологию направленной антенны.
[0096] Также может использоваться триангуляция, основанная на времени, которая является одним из методов, использующих расстояние для осуществления триангуляции. Предположение о триангуляции, основанной на времени, заключается в том, что время, используемое от радиометки до точки пассажирского дрона, может использоваться для определения расстояния между двумя точками, а именно между радиометкой и дроном. Поскольку скорость движения беспроводного сигнала известна, она приблизительно равна скорости света в воздухе. Для триангуляции, основанной на времени, существуют два типа методов: ТоА (время прихода сигнала) и TDoA (разница во времени прихода сигнала).
[0097] Метод ТоА напрямую измеряет время, в течение которого доходит пакет данных, используемый для передачи с пассажирского дрона на радиометку или наоборот. Пассажирский дрон может передавать пакет с меткой времени. Радиометка может легко получить время прибытия сигнала от дрона. Однако этот метод предполагает, что время на радиометке и пассажирском дроне одинаково. Чтобы удовлетворить это предположение, радиометки и пассажирские дроны должны точно синхронизировать свое время, чего очень трудно достичь в действительности.
[0098] Метод TDoA аналогичен методу ТоА, однако для его использования требуется только синхронизировать радиометки. Даже если время передачи пакетов данных неизвестно, радиометки могут иметь разные гиперболические кривые для различного предполагаемого времени передачи данных. В таком случае можно предполагать разные гиперболические кривые для различного предполагаемого времени передачи пакетов данных. И кривые, пересекающиеся в одной точке, должны быть правильным временем передачи, причем данная точка указывает возможное местоположение пассажирского дрона.
[0099] Также в данном техническом решении используется метод радиоотпечатков, который основывается на построенной карте уровней сигналов на цифровой карте в горной местности, и не требует использования моделей распространения радиосигнала. Для того чтобы определить местоположение этим методом, создается база данных, содержащая информацию об уровнях сигнала в различных участках цифровой карты горной местности. Карта уровня сигналов должна состоять из реальных координат и связанных с этими значениями уровней сигналов от доступных активных радиометок. Местоположение пассажирского дрона может быть оценено с помощью измерения уровня сигналов радиометок, и поисков точных совпадений в базе данных или ближайшей к приемнику точки, для которой измерены уровни сигнала. Данный метод обеспечивает высокую точность определения местоположения пассажирского дрона, однако требует поддержки карты сигналов в актуальном состоянии.
[001] Для вычисления местоположения пассажирского дрона метод использует предварительно собранные данные о значениях силы сигнала в каждой территориальной единице. Каждой территориальной единице соответствует m-мерный вектор (m=20) вещественных чисел (FingerPrint) - значений силы сигнала соответствующих т радиометок. При определении местоположения пассажирского дрона с него снимается значение силы сигнала m радиометок, строится m-мерный вектор q, после чего в базе производится поиск к наиболее близких векторов к вектору q. Местоположение пассажирского дрона определяется как усредненное значение координат территориальных единиц, соответствующих к ближайшим векторам к q. Метод радиоотпечатков подробно описан в уровне техники, например, здесь: Honkavirta V. "Location fingerprinting methods in wireless local area networks". M.Sc. thesis, Tampere University of Technology, November 2008.
[002] В некоторых вариантах реализации изобретения в нелетную погоду используют дополнительно для осуществления позиционирования сонар или радар, который находится на пассажирском дроне. Также может использоваться датчик визуального позиционирования. По сути это видеокамера, которая в режиме реального времени анализирует поверхность под дроном.
[003] В некоторых вариантах реализации изобретения для повышения точности позиционирования могут использовать глобальные системы позиционирования, например, такие как GPS (NAVSTAR), ГЛОНАСС или Galileo.
[004] Шаг 105: формируют по меньшей мере один маршрут по меньшей мере одного пассажирского дрона на основании позиционирования, определенного на предыдущем шаге, причем учитывают позиционирование и маршруты других дронов.
[005] Все расположенные активные радиометки имеют известные координаты, что и позволяет относительно них позиционировать пассажирские дроны. Таким образом, система координат для всех пассажирских дронов является единой. Зная свои координаты и координаты другого пассажирского дрона, можно проложить маршрут по направлению к другому пассажирскому дрону или с учетом его маршрута проложить непересекающийся маршрут.
[006] Таким образом, возникает задача определения координат других пассажирских дронов в своей собственной системе координат некоторого одного пассажирского дрона. Данная задача позволяет синхронизировать перемещение нескольких или группы пассажирских дронов в режиме реального времени для предотвращения их столкновения.
[007] В данном техническом решении может использоваться роевой алгоритм, например метод роя частиц, для синхронизации пассажирских дронов между собой.
[008] Все агенты системы в терминологии роевых алгоритмов, которыми являются пассажирские дроны выполняют следующие условия:
[009] - Все агенты должны избегать пересечения с окружающими их агентами;
[0010] - Каждая частица должна корректировать свою скорость в соответствии со скоростями окружающих ее частиц;
[0011] - Каждый агент должен стараться сохранять достаточно малое расстояние между собой и окружающими его агентами.
[0012] В примере осуществления в системе находится два пассажирских дрона. Первый объект (базовый объект) - это объект, который определяет местоположение второго объекта в своей собственной системе координат. Второй объект (целевой объект) - это объект, координаты которого необходимо определить в системе координат базового объекта.
[0013] Решение задачи определения координат движущегося объекта в
собственной системе координат базового объекта, если известны только расстояния между объектами, измеренные в последовательные моменты времени, известно из уровня техники и явлется очевидным для специалиста.
[0014] Аналогично определяют координаты, формируют маршруты любого количества пассажирских дронов и решают задачи, связанные с взаимодействием базового объекта с этими целевыми объектами.
[0015] В некоторых вариантах реализации изобретения пассажирский дрон может лететь по маршруту, вручную скорректированному пользователем на графическом интерфейсе пользователя пассажирского дрона.
[0016] Прокладывание маршрута пассажирского дрона пользователя может осуществляться по заранее заданным точкам пользователя, или вдоль лыжной трассы, или вдоль наиболее безопасных мест в случае падения и т.п.
[0017] В некоторых вариантах реализации изобретения для увеличения точности используют так называемые «графы движения» - некоторые вероятные траектории перемещения пассажирских дронов. Использование такого алгоритма существенно повышает точность позиционирования. В данном решении может использоваться широкий арсенал алгоритмов расчета траектории: ToF (Time-of-Flight); RSSi (Received Signal Strength Indicator - по силе сигнала от радиометок); IMU (Inertial Movement Unit - электронный самописец движения), а также эффективного набора датчиков: трехосевого акселерометра; трехосевого гироскопа; трехосевого магнитометра пассажирского дрона.
[0018] В некоторых вариантах осуществления изобретения могут использоваться два типа топологии беспроводной сети: "точка"-"точка" (р2р) и/или "точка"-"многоточка" (р2 тр). Точкой в данном контексте может пониматься пассажирский дрон, топология беспроводной сети подразумевает построение между точками доступа Wi-Fi моста. Для формирования беспроводного моста и передачи данных между дронами, каждый пассажирский дрон должен дополнительно содержать принимающую и передающую антенну.
[0019] Для корректной работы беспроводного моста между дронами, расстояние должно соответствовать радиусу зоны Френеля, которая определяется по следующей формуле:
[0020] где R - радиус зоны Френеля,м
[0021] S - расстояние до нужной точки расчета, от первой антенны, км
[0022] D - расстояние до нужной точки расчета, от второй антенны, км
[0023] f - частота, ГГц.
[0024] Для организации топологии сети "точка"-"многоточка" могут использоваться совместно с радиометками, например, в одном корпусе, дополнительно Wi-Fi точки доступа. Могут быть использованы точки доступа компании Ubiquiti серии NanoBeam, PowerBeam, NanoBridge и PowerBridge, которые имеют производительную радиочасть с высокой мощностью (до 28 dBm) и параболические WiFi антенны, фокусирующие радиосигнал в узкий луч, что позволяет добиться дальности соединения до 15 км и более в условиях прямой видимости между устройствами. Аналогом могут являться точки доступа AirGrid, которые при схожих характеристиках имеют меньшую парусность, поскольку отражатели их WiFi антенн имеют решетчатую форму. Использование AirGrid очень рекомендуется использовать в местах с повышенной ветровой нагрузкой, например, в горной местности. При использовании беспроводного WiFi моста появляется возможность бесперебойного обмена информацией между пассажирскими дронами на достаточно большом расстоянии, что также может использоваться и для позиционирования дронов.
[0025] Данный беспроводной Wi-Fi мост может работать на частоте 5 ГГЦ (в отличие от большинства WiFi оборудования, работающего на частоте 2.4 ГГЦ), в связи с чем на передачу данных не влияют помехи.
[0026] Система навигации пассажирского дрона в горной местности может содержать пассажирский дрон, содержащий драйверы двигателей (FSC), плату управления (Flight Control Unit, FCU), инерционный модуль IMU, радиопередатчик, модуль питания, модуль навигации.
[0027] Для управления двигателями пассажирского дрона необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателей (FSC). В уровне техники существует достаточно много самых различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены. В данном техническом решении может использоваться микросхема, которая называется L293D и является одной из самых распространенных микросхем, предназначенных для этой цели. L293D содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью широтно модулированного сигнала (ШИМ). Эта микросхема объединяет полноценный контроллер, драйвер трехфазного поста, аналоговую периферию (компараторы, АЦП, ОУ) и микросхемы питания (LDO 12 В, DC/DC). Микросхема может работать с напряжениями до 45 В и является идеальным решением для создания сверхкомпактных драйверов электродвигателей.
[0028] От платы управления (Flight Control Unit, FCU) зависит стабильность полета. Плату управления можно предварительно запрограммировать, в результате чего получают систему управления, работающую под руководством оператора или автономно. При помощи шлейфа она соединяется с каждым мотором, драйвером двигателя и подает на него управляющий сигнал (запрограммированную команду). Чем большее количество сигналов сможет обрабатывать плата, тем больше маневров сможет выполнять пассажирский дрон. Набор датчиков пассажирского дрона подключается также к плате управления. Акселерометр, барометр, гироскоп, данные с радиометок передают на нее свои показания, которые она должна обрабатывать. Здесь же формируется и обратная связь с удаленным оператором и/или пассажиром, который является оператором, через передатчик, установленный на корпусе.
[0029] В качестве модуля(-ей) питания могут использоваться аккумуляторы на основе лития, в частности - литий-полимерные (Li-Pol). Отличительной особенностью литиевых аккумуляторов, предназначенных для питания пассажирского дрона, является их способность к высокой токоотдаче, которая выражается величиной "С", кратной емкости аккумулятора. Для пассажирских дронов необходимы аккумуляторы с токоотдачей не менее 15…25С. В данном изобретении может использоваться серия аккумуляторов LP/НС, которая имеет токоотдачу кратностью до 15…20°С, а серия LP/HD - 20С. Например, аккумулятор LP1042126HD с емкостью 5 А⋅ч способен долговременно работать на нагрузку с током потребления до 100 А.
[0030] В качестве радиопередатчика может использоваться SPIRIT1 -универсальный приемопередатчик, работающий с частотными диапазонами 169/315/433/868/915 МГц и обеспечивающий скорость передачи до 500 кбит/с.Мощность передатчика для SPIRIT1 достигает 16 дБм, а чувствительность приемника - 118 дБм. Также SPIRI1T отличается малыми габаритами (2×2 мм) и низким потреблением. Также пассажирский дрон может включать модуль Wi-Fi, который представляет собой законченную систему для построения узлов беспроводных сетей с поддержкой стека TCP/IP, серверных функций и протоколов безопасности SSI/TLS.
[0031] Способы, описанные здесь, действия по их осуществлению и различные варианты осуществления и вариации этих способов и действий, по отдельности или в комбинации, могут быть определены в соответствии с компьютерно-читаемыми командами, материально воплощенными на одном или более компьютерно-читаемых носителях, например, на энергонезависимых носителях записи, элементах запоминающих устройств на интегральных схемах или их комбинации. Компьютерно-читаемые носители могут быть любыми доступными носителями, к которым может получать доступ устройство обработки данных. Для примера, но не для ограничения, компьютерно-читаемые носители могут содержать запоминающие устройства компьютеров и носители, используемые при связи. Запоминающие устройства компьютеров содержат энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные любым способом или технологией для хранения информации, такими, как компьютерно-читаемые команды, структуры данных, программные модули или другие данные. Компьютерные запоминающие устройства содержат, в частности, RAM, ROM, EEPROM, флэш-память или запоминающие устройства по другим технологиям, CD-ROM, цифровые универсальные диски (DVD) или другие оптические запоминающие устройства, магнитные кассеты, магнитную ленту, запоминающие устройства на магнитных дисках или другие магнитные запоминающие устройства, другие типы энергозависимых и энергонезависимых запоминающих устройств, любую другую среду, которая может использоваться для хранения желаемой информации и к которой компьютер может получать доступ, и любую подходящую комбинацию перечисленного выше.
[0032] Компьютерно-читаемые команды, осуществляемые на одном или более компьютерно-читаемом носителе могут определять команды, например, как часть одной или более программ, которые в результате их выполнения компьютером дают команду компьютеру выполнять одну или более функций, описанных здесь, и/или различные варианты осуществления, вариации и их комбинации. Компьютерно-читаемые носители, на которых такие команды реализуются, могут постоянно находиться на одном или более компонентах любой из систем, описанных здесь, могут распределяться по одному или более таких компонентов и могут находиться в переходном состоянии между ними. Различные аспекты изобретения могут быть реализованы в программируемой среде (например, документы, созданные в HTML, XML или другом формате, которые, когда просматриваются в окне программы браузера, выполняют аспекты графического интерфейса пользователя (GUI) или выполняют другие функции). Различные аспекты изобретения могут реализовываться как запрограммированные и незапрограммированные элементы или как любая их комбинация.
[0033] Компьютерно-читаемые носители могут быть переносимы, так что команды, хранящиеся на них, могут загружаться на любой подходящий ресурс компьютерной системы, чтобы осуществлять аспекты настоящего изобретения, обсужденные здесь. Кроме того, следует понимать, что команды, хранящиеся на компьютерно-читаемом носителе, описанные выше, не ограничиваются командами, реализуемыми как часть прикладной программы, работающей на главном устройстве обработки данных; скорее, команды могут быть осуществлены как любой тип машинного кода (например, программное обеспечение или микрокоманда), который может использоваться для программирования процессора, чтобы реализовать обсужденные выше аспекты настоящего изобретения.
[0034] Различные варианты осуществления, согласно изобретению, могут быть реализованы на одной или более компьютерных системах. Например, различные аспекты изобретения могут быть реализованы как специализированное программное обеспечение, выполняемое в универсальной компьютерной системе, например, на устройстве, способном работать в беспроводной системе, и/или на периферийном устройстве. Компьютерная система может содержать процессор, подключенный к одному или более запоминающим устройствам, таким как дисковый накопитель, запоминающее устройство или другое устройство для запоминания данных. Запоминающее устройство обычно используется для хранения программ и данных во время работы компьютерной системы. Компоненты компьютерной системы могут быть соединены механизмом объединения, который может содержать одну или более шин данных (например, между компонентами, которые интегрированы внутри одной и той же машины), и/или сетей (например, между компонентами, постоянно находящимися на отдельных дискретных машинах). Компьютерная система также содержит одно или более устройств ввода данных, например, клавиатуру, мышь, шаровой манипулятор, микрофон, сенсорный экран и одно или более устройств вывода, например, печатающее устройство, экран дисплея, громкоговоритель. Кроме того, компьютерная система может содержать один или более интерфейсов, которые связывают компьютерную систему с сетью связи (дополнительно или как альтернатива механизму объединения).
[0035] Сеть может быть сетью любого подходящего типа, такой как локальная сеть (LAN), глобальная сеть (WAN), интранет, Интернет или любой их комбинацией. Для иллюстративных целей в этом примере показано ограниченное количество устройств. Устройства могут присоединяться к сети через один или более серверов, маршрутизаторов, модулей доступа, шлюзов, устройств трансляции сетевого адреса или через любую подходящую их комбинацию.
[0036] Следует понимать, что изобретение не ограничивается его выполнением на какой-либо конкретной системе или группе систем. Также следует понимать, что изобретение не ограничивается какой-либо частной распределенной архитектурой, сетью или протоколом связи.
[0037] Из описанных здесь некоторых вариантов осуществления изобретения, специалистам в данной области техники должно быть ясно, что вышеописанное осуществление является просто иллюстрацией, а не ограничением, и представлено только в качестве примера. Многочисленные модификации и другие варианты осуществления находятся в рамках объема обычных средств, принятых в данной области техники, и рассматриваются как попадающие в объем изобретения. Приведенное выше описание и чертежи служат только в качестве примера. В частности, хотя многие из представленных здесь примеров, содержат определенные комбинации способа, действий или элементов системы, следует понимать, что эти действия и эти элементы могут быть объединены другими способами, чтобы выполнять те же самые цели. Действия, элементы и признаки, обсуждавшиеся в связи с только одним вариантом осуществления, не предназначены исключаться из подобной роли в других вариантах осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОКАЛЬНАЯ СИСТЕМА МОНИТОРИНГА МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ СПОРТСМЕНОВ И СПОРТИВНЫХ СНАРЯДОВ | 2018 |
|
RU2691947C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ОБЪЕКТОВ В ЗОНЕ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ | 2020 |
|
RU2756032C1 |
| Система определения местоположения объекта | 2018 |
|
RU2698409C1 |
| Самоорганизующийся и самоуправляемый рой БПЛА и способ контроля территории на наличие установленного события посредством такого роя | 2022 |
|
RU2805431C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ТРЕХМЕРНОГО ЛИЦА ОБЪЕКТА И УСТРОЙСТВО ДЛЯ НЕГО | 2017 |
|
RU2671990C1 |
| Коммуникационная система для подземных сооружений | 2017 |
|
RU2672273C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| Система определения местоположения объекта внутри помещения | 2017 |
|
RU2679727C2 |
| Способ автоматической навигации лесозаготовительной машины в реальном масштабе времени в заданной системе координат | 2020 |
|
RU2777560C2 |
Данное техническое решение относится к области беспилотной навигации в вычислительной технике, а в частности к системам и способам навигации пассажирских дронов в горной местности. Предлагается способ навигации пассажирского дрона в горной местности, в котором получают карту горной местности, загруженную в памяти по меньшей мере одного пассажирского дрона, имеющего набор датчиков, затем передают в режиме реального времени посредством набора активных радиометок сигналы, включающие в себя информацию об их местоположении с привязкой к топографии местности, по меньшей мере одному пассажирского дрону. Причем получают посредством приемника пассажирского дрона сигналы от активных радиометок, находящихся на доступном расстоянии приемника пассажирского дрона, осуществляют позиционирование по меньшей мере одного дрона на основании карты горной местности, сигналов активных радиометок и данных набора датчиков пассажирского дрона посредством устройства обработки данных, причем измеряют уровни сигналов всех радиометок в каждой точке цифровой карты, определяют ближайшую к приемнику дрона радиометку, для которой измерены уровни сигнала, и определяют местоположение пассажирского дрона как усредненное значение ближайших координат радиометок. После чего формируют по меньшей мере один маршрут по меньшей мере одного пассажирского дрона на основании позиционирования, определенного на предыдущем шаге, причем учитывают позиционирование и маршруты других дронов. Технический результат - повышение точности и скорости навигации пассажирского дрона в горной местности. 2 н. и 8 з.п. ф-лы, 5 ил.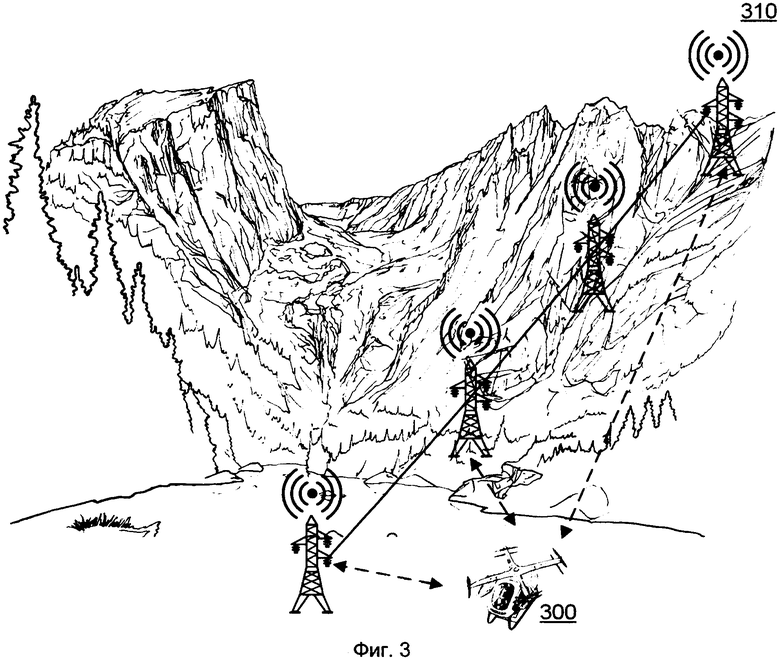
1. Способ навигации пассажирского дрона в горной местности, включающий следующие шаги:
• получают карту горной местности, загруженную в памяти по меньшей мере одного пассажирского дрона, имеющего набор датчиков;
• передают в режиме реального времени посредством набора активных радиометок сигналы, включающие в себя информацию об их местоположении с привязкой к топографии местности, по меньшей мере одному пассажирского дрону;
• получают посредством приемника пассажирского дрона сигналы от активных радиометок, находящихся на доступном расстоянии, приемника пассажирского дрона;
• осуществляют позиционирование по меньшей мере одного дрона на основании карты горной местности, сигналов активных радиометок и данных набора датчиков пассажирского дрона посредством устройства обработки данных, причем
 измеряют уровни сигналов всех радиометок в каждой точке цифровой карты, где она установлена;
измеряют уровни сигналов всех радиометок в каждой точке цифровой карты, где она установлена;
определяют ближайшую к приемнику дрона радиометку, для которой измерены уровни сигнала;
определяют местоположение пассажирского дрона как усредненное значение ближайших координат радиометок;
• формируют по меньшей мере один маршрут по меньшей мере одного пассажирского дрона на основании позиционирования, определенного на предыдущем шаге, причем учитывают позиционирование и маршруты других дронов.
2. Способ по п. 1, характеризующийся тем, что активной радиометкой явлется GPS-маяк, и/или iBeacon-маяк, и/или RFID-метка.
3. Способ по п. 1, характеризующийся тем, что дрон имеет камеру, и/или лидар, и/или сонар.
4. Способ по п. 1, характеризующийся тем, что при формировании карты горной местности на основании сигналов активных радиометок устройство обработки данных находится на пассажирском дроне.
5. Способ по п. 1, характеризующийся тем, что при формировании карты горной местности на основании сигналов активных радиометок устройство обработки данных находится удаленно.
6. Способ по п. 1, характеризующийся тем, что при формировании маршрутов пассажирских дронов используют роевой алгоритм для синхронизации пассажирских дронов между собой.
7. Способ по п. 1, характеризующийся тем, что при позиционировании пассажирских дронов используют GPS, и/или ГЛОНАСС, и/или Galileo.
8. Способ по п. 1, характеризующийся тем, что при позиционировании пассажирских дронов используют метод радиоотпечатков.
9. Способ по п. 1, характеризующийся тем, что при позиционировании пассажирских дронов расстояние от радиометки до приемника дрона определяется по углу направления на радиометки, и/или по времени прихода сигнала, и/или по времени распространения сигнала от радиометки до приемника.
10. Система навигации пассажирского дрона в горной местности, включающая следующие компоненты:
• по меньшей мере один пассажирский дрон, выполненный с возможностью получения посредством приемника сигналов от по меньшей мере одной радиометки, находящейся на доступном расстоянии приемника;
• по меньшей мере одна радиометка, выполненная с возможностью передачи сигналов, включающих в себя информацию об ее местоположении с привязкой к топографии местности, по меньшей мере одному пассажирскому дрону;
• устройство обработки данных, выполненное с возможностью
 осуществления позиционирования по меньшей мере одного дрона на основании карты горной местности, сигналов активных радиометок и данных набора датчиков пассажирского дрона посредством устройства обработки данных;
осуществления позиционирования по меньшей мере одного дрона на основании карты горной местности, сигналов активных радиометок и данных набора датчиков пассажирского дрона посредством устройства обработки данных;
 формирования по меньшей мере одного маршрута по меньшей мере одного пассажирского дрона на основании позиционирования, определенного на предыдущем шаге, причем учитывают позиционирование и маршруты других дронов
формирования по меньшей мере одного маршрута по меньшей мере одного пассажирского дрона на основании позиционирования, определенного на предыдущем шаге, причем учитывают позиционирование и маршруты других дронов
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

