Изобретение относится к летательным аппаратам на динамической воздушной подушке, движущимся на небольшой высоте и поддерживающимся в воздухе аэродинамической подъемной силой, генерируемой на воздушном крыле, корпусе и других элементах, предназначенных для создания подъемной силы с использованием в основном в эксплуатационном режиме влияния близости опорной поверхности - «экранного эффекта», и касается конструирования экранолета с силовой движительной установкой, выполненной по схеме мультикоптера, значительно улучшающей летные характеристики аппарата и повышающей уровень устойчивости и управляемости в полете.
Как известно из аэродинамики, при полете возникает «экранный эффект» - это эффект резкого увеличения подъемной силы крыла и других аэродинамических характеристик летательного аппарата, проявляющийся при полете вблизи экранирующей поверхности (воды, земли и др.). При этом за крылом уменьшается скос потока и снижается вихреобразование около концов крыла, это снижает индуктивное сопротивление. Таким образом обеспечивается влияние экрана на заметное увеличение подъемной силы крыла и снижение его аэродинамического сопротивления. Это создает существенное повышение аэродинамического качества летательного аппарата (отношение подъемной силы к силе лобового сопротивления). «Это качество может достигать значительно больших показателей, чем у всех известных видов транспортных средств с близкими скоростями движения» [1]. Данные свойства экраноплана существенно влияют на экономические показатели и позволяют применять силовую установку меньшей мощности, при этом увеличив грузоподъемность машины. Несмотря на это конструкции современных экранопланов далеки от совершенства. Они сложны в производстве и обслуживании, малоэкономичны, а также небезопасны в эксплуатации. Мелкосерийное производство достигли лишь экранопланы при их эксплуатации над водной поверхностью. Расширение области применения и условий эксплуатации данного вида транспорта является сложной технической задачей, решить которую возможно только при условии разработки новых технических решений с использованием эффекта влияния экрана, обеспечивающей надежную стабилизацию и безопасность полетов на малой высоте над любой относительно ровной поверхностью. Одной из самых сложных и трудновыполнимых задач при создании экранопланов остается придание ему продольной устойчивости - «способности сохранять заданный режим полета и возвращаться к нему после прекращения воздействия на него различного рода возмущений» [2]. Считается, что эта проблема относится к относительно небольшим летательным аппаратам (ЛА). Летать на малой высоте (до нескольких метров) особенно сложно из-за непосредственной близости опорной поверхности, где экран нестабильный и машина подвержена воздействию таких внешних факторов, как порывы ветра, «воздушные ямы», различные препятствия на пути и т.д., поэтому пилоту на скорости бывает довольно сложно среагировать на сложную ситуацию, чтобы выровнять аппарат, а над сильно пересеченной местностью полет бывает вообще затруднен или даже невозможен. Поддерживать устойчивость и управляемость на таких переходных режимах, как взлет и посадка, также весьма затруднительно ввиду воздействия резко меняющихся внешних сил.
В теории экранного полета известны специфические особенности: крыло экраноплана создает подъемную силу в основном не за счет разреженного давления над верхней плоскостью, а за счет повышенного давления под нижней плоскостью. Причем фокус подъемной силы крыла (центр ее приложения) вблизи экрана не постоянный, а смещается в зависимости от высоты полета над экраном, скорости движения аппарата и угла атаки, что существенно осложняет систему продольной устойчивости [3]. Известно, что центр давления аэродинамического экрана при крейсерской скорости находится ближе к задней кромке крыла, но если экраноплан перед каким-нибудь препятствием взмывает вверх и выходит за пределы экрана, то центр давления смещается к передней кромке крыла, отчего может возникнуть так называемый «аэродинамический подхват» - самопроизвольный рост тангажа (изменение направления движения аппарата относительно поперечной оси) и необратимый процесс увеличения угла кабрирования, который может привести к перевороту через корму [4]. Опасная неустойчивость возникает и в момент обратного приближения аппарата к экрану, когда «воздух под крылом как бы запирается, давление под ним распределяется более равномерно и центр этого давления смещается назад. Все вместе это приводит к появлению значительного пикирующего (в сторону экрана) момента на аппарате [5]. Во время посадки с приближением к опорной поверхности «эффект экрана» усиливается и центр приложения подъемной силы опять же существенно смещается к задней кромке крыла, в то время как на передней кромке давление ослабевает, в результате чего появляется пикирующий момент, зачастую приводящий к перевороту машины через носовую часть - капотированию. Особенно неустойчив у экрана аппарат «самолетной» схемы и при малейших возмущениях либо ударяется об экран, либо уходит в высоту. Действия рулей высоты для выравнивания машины при появлении подобных дисбалансирующих моментов зачастую не хватает, а увеличение площади стабилизаторов ухудшает аэродинамику, и все равно не обеспечивает полной гарантии восстановления устойчивости.
В силу этих причин полет в непосредственной близости от поверхности накладывает повышенные требования к обеспечению устойчивости экраноплана, в первую очередь в продольной плоскости.
Поперечная же устойчивость (по крену) практически постоянна и не столь проблематична, так как обеспечивается за счет эффекта самого экрана: при крене аппарата происходит резкое возрастание подъемной силы на части крыла, приближающейся к экранирующей поверхности, что приводит к появлению восстанавливающего эффекта [6, 7].
Из уровня техники известен вертолет-самолет-амфибия (патент РФ №2310583), который содержит моноплан с высокорасположенным крылом небольшого удлинения, на консолях которого смонтированы два поворотных кольцевых канала, оснащенных узлами поворота и винтами, создающими вертикальную и соответствующим отклонением горизонтальную тягу, и снабженных редукторами винтов, которые связаны соединительными валами с главным редуктором, приводимым силовой установкой, включающей два двигателя, установленных в гондолах по обе стороны от продольной оси фюзеляжа и снабженных синхронизирующим валом и газовыми рулями путевого и продольного управления, смонтированными в конце хвостовой балки, хвостовое оперение и шасси трехопорное, убирающееся в носовой отсек, и герметичные борт-отсеки. Вертолет-самолет-амфибия имеет возможность преобразования на вертолетных режимах полета с одно- в трехвинтовую ярусную схему 2+1 и обратно или на самолетных режимах полета с моно- в биплановую схему и обратно. Однако данная конструкция сложна и не обладает достаточной грузоподъемностью сравнимой с экранопланом.
Из проведенного патентных поиска и информации СМИ близкими к предлагаемому изобретению по экраноплану известны самолет Airbus E-FAN, самолет TRIFAN 600 компаний "XTI Airkraft" с "Bye Aerospace".
Известен гидроконвертоэкраноплан (патент на изобретение РФ №2264951), который имеет моноплан с размещенными тандемом средне- и высокорасположенным крыльями. На их консолях смонтированы кольцевые каналы, оснащенные узлами поворота и консольными винтами, создающими вертикальную и соответствующим отклонением горизонтальную тягу, и снабженные в их центре на горизонтальных ребрах жесткости редукторами винтов, из которых передние и задние объединены соответственно разноуровневыми поперечными и продольными соединительными валами трансмиссии с двумя промежуточными Т-образными редукторами, приводимыми силовой установкой. Однако данная конструкция также сложна в эксплуатации и уступает экраноплану по грузоподъемности.
Наиболее близким по технической сущности к заявляемому техническому решению является (патент РФ №2737406) электромоторный экраноплан-амфибия, содержащий центральное крыло с присоединенными по бокам консолями внешнего крыла, фюзеляж, встроенный внутрь центрального крыла, с выступающими из него вперед носком и над ним фонарем кабины, поплавки катамаранного типа с колесами или без колес, установленные снизу по бокам центрального крыла, двухкилевое вертикальное оперение, пристыкованное к бокам хвостовой части фюзеляжа, горизонтальное оперение, расположенное на килях сверху, два или более воздушных винта или воздушных винта в кольце, закрепленных перед консолями центрального крыла на поворотной балке в передней части носка фюзеляжа, вращаемой дистанционным приводом, каждый упомянутый воздушный винт оснащен электродвигателем, расположенным на оси соответствующего воздушного винта, блоками аккумуляторной батареи, размещенными в водонепроницаемых отсеках консолей центрального крыла, электронными блоками конвертора и контроллера, располагаемых в носке фюзеляжа.
Известный летательный аппарат (экраноплан) является наиболее близким по технической сущности к заявляемому экраноплану и выбран в качестве прототипа, однако обладает недостаточной подъемной силой и недостаточно высокими аэродинамическими качествами, чтобы выполнять вертолетный режим на большой высоте, и недостаточной поперечной и продольной управляемостью при наборе высоты.
Экраноплан, в отличие от самолета, не может в такой же пропорции увеличивать скорость, поскольку его режим полета происходит при постоянной плотности воздуха. Но при этом, высокая плотность воздуха способствует во столько же раз увеличению подъемной силы, при той же площади крыла, что и у самолета, и во столько же увеличению тяги, снимаемой с единицы мощности двигателя. К сожалению, силовая установка экраноплана должна преодолеть значительный горб сопротивления при старте с воды.
Целью предлагаемого изобретения является создание экраноплана на основе нового принципа движения, обладающего оптимальными летными характеристиками и высоким уровнем устойчивости, способного совершать стабильный полет на всех режимах движения, причем не только над водной поверхностью, но и в неиспользуемом практически диапазоне движения - над твердой земной поверхностью и преодоления горба сопротивления путем изменения процесса при старте экраноплана с воды и взлета с твердой поверхности.
Технический результат от использования всей совокупности существенных признаков изобретения заключается в обеспечении оптимальных летных характеристик, в улучшении самостабилизации в режиме экранного полета, обеспечении высокого уровня управляемости и устойчивости движения по высоте, тангажу и крену и возможности максимально уменьшить или исключить процесс преодоления горба сопротивления при старте экраноплана с водной поверхности и возможности старта с твердой поверхности.
Конструктивная компоновка экраноплана выполнена по схеме «прямого крыла», использована нетрадиционная силовая установка, выполненная по схеме мультикоптера.
Мультикоптер содержит фюзеляж, на котором установлена ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях; фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, а средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа. Силовая установка размещается на верхней части вдоль корпуса экранолета. Экранолет может иметь вспомогательную силовую установку, размещенную во внутренней части корпуса, которая используется для приведения в действие водометных движителей и (или) дополнительные ВМГ с воздушными винтами размещенные на горизонтальном оперении. Средства стабилизации могут быть выполнены в виде килей, являющихся горизонтальным и вертикальным оперением. При этом площадь горизонтального оперения и расположение его плеча от центра тяжести экранолета выбираются с возможностью обеспечения запаса его продольной статической устойчивости по углу тангажа.
Экраноплан с двигательной установкой, выполненной по схеме мультикоптера, может быть снабжен опорными элементами, выполненными в виде понтонов, где располагаются водометные движители, приводимые в действие вспомогательной двигательной установкой и крепящимися к днищу корпуса. При альтернативе корпус в нижней части может быть выполнен в форме, несущей функцию опорных элементов. В этом варианте водометные движители располагаются внутри в нижней его части.
Из аэродинамики известно, что экраноплан во время полета на границе двух сред подвергается значительным инерционным и ударным нагрузкам, поэтому, выбирая между требованиями аэродинамики и технологичностью машины, решающим должно быть обеспечение прочности аппарата и безопасности экипажа.
Этим требованиям отвечает взятая за основу схема «прямое крыло» (разновидность «самолетной схемы»), внутри корпуса которого могут размещаться все агрегаты, экипаж и полезный груз. Компактный несущий корпус такой конструкции, выполненной по самолетной схеме с силовой двигательной установкой выполненной в виде мультикоптера с ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, а средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вокруг оси балок фюзеляжа. Это кардинально изменяет аэродинамику экраноплана, поскольку вся силовая установка может создавать подъемную силу, как с использованием поверхности крыла или без него или комбинированную подъемную силу, а при относительно невысокой крейсерской скорости и высоте полета большая площадь крыла получает уменьшение удельной нагрузки на него, а также обеспечивает управляемое хорошее планирование. Кроме того, применение силовой установки мультикоптерного типа, где воздушные винты элетродвигателей имеют возможность поворота вокруг оси балок на угол 360° это позволяет в сочетании с ВМГ с двигателем внутреннего сгорания (ДВС) гораздо эффективнее использовать «воздушную подушку» экрана, увеличить грузоподъемность и высоту полета, обеспечивает упрощение структуры конструкции, ее высокую прочность и живучесть, что в свою очередь сказывается на надежности и эксплуатационной безопасности увеличению его грузоподъемности и дальности полета аппарата.
Предлагаемая схема главной энергетической установки в компоновке экраноплана с дополнительными ВМГ с воздушными винтами, размещенными на горизонтальном оперении, относится к единой энергетической установкой (ЕЭУ), обеспечивающей как режим старта, так и маршевый режим (полет).
Для морского варианта экраноплана в компоновке необходимо дополнительно предусматривать установку «малого хода», состоящую из водометных движителей, и (или) дополнительные ВМГ с воздушными винтами, размещенные на горизонтальном оперении. Это, в сочетании с высокой крейсерской скоростью, повышает безопасность и автономность экраноплана в режиме плавания до уровня обычных водоизмещающих судов.
Для пояснения технической сущности изобретения представлены чертежи и схемы Фиг. 1-4, на которых изображено:
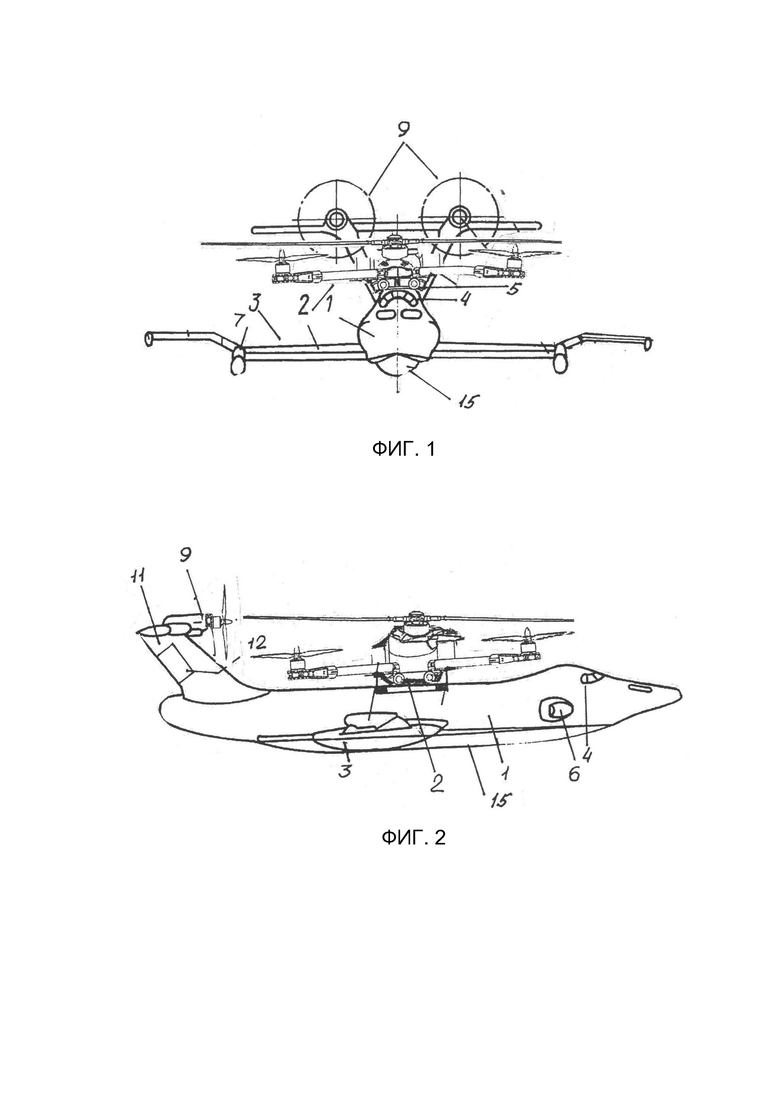
- Фиг. 1 - Вид спереди, экраноплан с силовой установкой, выполненной по схеме мультикоптера.
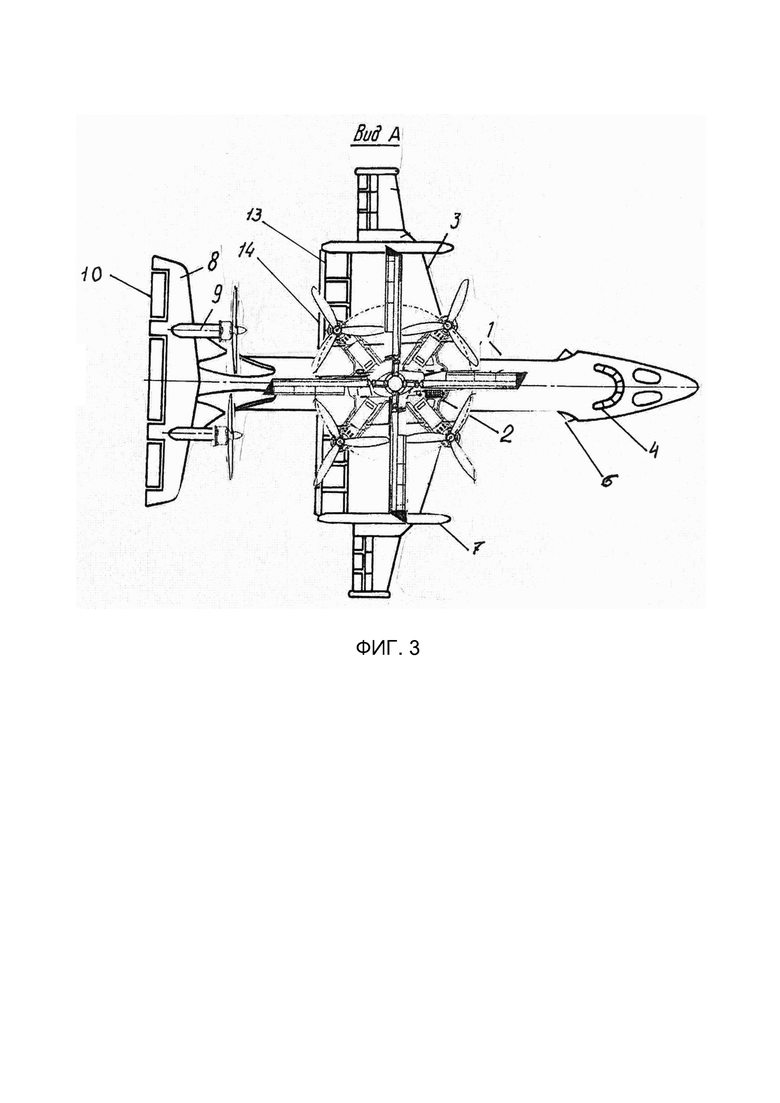
- Фиг. 2 - Вид сбоку экраноплан с силовой установкой, выполненной по схеме мультикоптера.
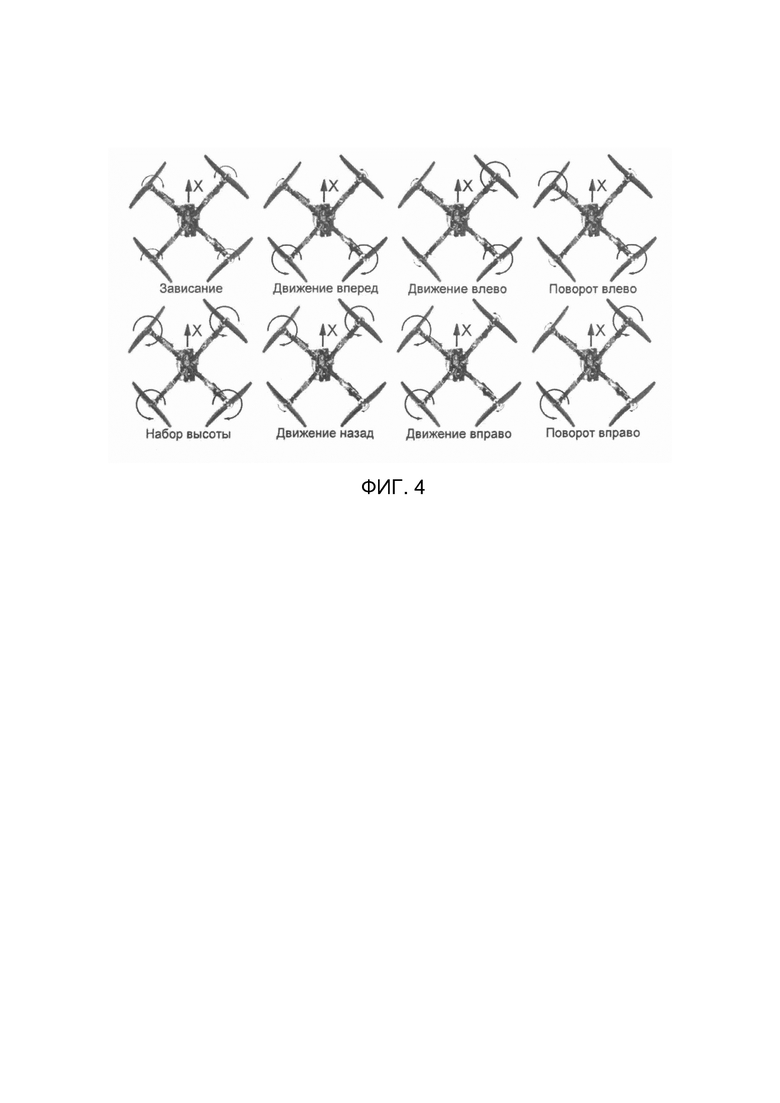
- Фиг. 3 - Вид сверху, экраноплан с силовой установкой, выполненной по схеме мультикоптера.
- Фиг. 4 - Схема полета экраноплана с силовой установкой, выполненной по схеме мультикоптера.
Конструктивная схема предлагаемого экраноплана представляет из себя фюзеляж (1) выполненный по «самолетной схеме», которая оптимально подходит для размещения силовой установки, выполненной в виде мультикоптера (2) и установленной на фюзеляж (1), выполненный в виде продолговатой формы, вытянутой от носа к корме, крыла (3) (Фиг. 1-3). Конфигурация корпуса может быть любой другой формы, оптимальной для эксплуатационных целей и улучшающей аэродинамику аппарата [8, 9]. В носовой и средней частях экраноплана размещаются кабина (4) для экипажа и энергетическая установка (на схеме не показана). Как вариант - кабина может быть выступающей из корпуса. Так же как вариант может быть предусмотрена аварийная кабина (5), расположенная в силовой установке, выполненной по схеме мультикоптера, который может отделяться при необходимости и совершать полет самостоятельно. Предусмотрено расположение центра массы впереди аэродинамического фокуса улучшает центровку экраноплана, от которой зависят ходовые характеристики и продольная устойчивость [10]. Для стабилизации высоты полета и балансировки по тангажу при полете на закритических углах атаках в носовой части корпуса может монтироваться управляемый предкрылок (6). На крыле (3) шарнирно закреплены элероны (13) и закрылки (14), служащие для балансировки и управления устойчивостью по тангажу и крену. Маршевые двигатели (9) и рули высоты (10), расположенные высоко на килях, выведены из возмущенного потока реактивной струи движителей, и находятся вне зоны влияния экрана, что повышает эффективность управления по тангажу и улучшает продольную статическую устойчивость аппарата [11]. Хвостовое оперение для обеспечения надлежащей управляемости и путевой устойчивости двухкилевое, достаточно выраженное (11). Рули направления на килях (12) частично расположены внутренней плоскостью в воздушном потоке, отбрасываемом воздушными винтами, что позволяет управлять вектором тяги, перенаправляя реактивную струю в нужную сторону и гораздо эффективнее маневрировать по курсу. На боковинах крыла (3), шарнирно закреплены элероны (13) и закрылки (14), служащие для балансировки и управления устойчивостью по тангажу и крену.
Для улучшения несущих свойств корпуса и балансировки аппарата монтируются средства механизации - закрылки и тормозные щитки (на фиг. не показано). Днище корпуса (15) в передней части может быть, как вариант, вогнутого типа, а в кормовой части - прямая. Такая форма предотвратит перетекание потока из-под днища в стороны и увеличит подъемную силу крыла. Шасси экраноплана (на фиг. не показано) может быть колесным, сменным или любого другого типа, в зависимости от местности базирования и условий движения.
Главная конструктивная особенность экраноплана - применение нетрадиционной движительной силовой установки с выполненной в виде мультикоптера с ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, благодаря данному техническому решению, которым решаются все проблемные вопросы, касающиеся устойчивости и управляемости аппарата и возможности максимально уменьшить или исключить процесс преодоления горба сопротивления при старте экраноплана с водной поверхности и возможности старта с твердой поверхности.
Силовая установка выполненная в виде мультикоптера содержит фюзеляж, на котором установлена ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях, при этом длина воздушного винта ВМГ с ДВС по меньшей мере вдвое больше длины воздушных винтов электродвигателей. Система также содержит компьютер, установленный на шасси с возможностью обмена данными с бортовым компьютером экраноплана и с двигателями мультикоптера, источник электропитания, установленный на шасси мультикоптера и соединенный с двигателями ВМГ мультикоптера, генератор, соединенный с ДВС и зарядным устройством АКБ и осуществляющий при работе ДВС зарядку АКБ с возможностью осуществлять работу электродвигателей ВМГ воздушных винтов в полете при необходимости. Антенны, установленные на шасси с возможностью обмена данными с компьютером. Воздушные винты ВМГ с электродвигателями установлены на лучах рамы с возможностью поворота вдоль оси лучей рамы на 360 градусов с использованием аэродинамических рулей (заслонок) с возможностью фиксации. Кроме этого лучи рамы мультикоптера выполнены таким образом, что могут использоваться в качестве топливных баков для питания ДВС ВМГ. Установлена система аварийной посадки состоящей подушки безопасности и шасси, выполненного в виде торсионов. Шасси выполняют роль опор и соединяют корпус силовой установки с корпусом экраноплана с помощью креплений обеспечивающих возможность отсоединения силовой установки и использования силовой установки в качестве ЛА. Управление полетом экраноплана может происходить следующим образом: принципиально без применения ВМГ с ДВС происходит так же, как при радиальном расположении ВМГ с электродвигателями. При увеличении оборотов задних ВМГ и уменьшении на передних мультикоптера силовая установка будет обеспечивать движение экраноплана вперед. При манипулировании левой и правой группами силовая установка мультикоптера будет осуществлять движение экраноплана вправо или влево (Фиг 4). Поворот экраноплана применением силовой установки производится замедлением вращения, например, винтов мультикоптера, крутящихся по часовой стрелке или наоборот. При включении ВМГ с ДВС и отключении ВМГ с электродвигателями экранолет будет осуществлять полет как ЛА вертолетного типа [12, 13, 14], т.е. обороты несущего винта, будут стараться поддерживать постоянными. В этом случае единственной переменной величиной будет оставаться установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъемная сила будет увеличивается, а при уменьшении - соответственно уменьшается, что будет обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот. Наклон экраноплана вперед или назад (по тангажу) и вбок (по крену) будет достигаться созданием разницы подъемных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени. Для компенсации реактивного момента, который будет возникать в данном режиме полета в качестве рулевого устройства (винта или фенестрона) можно использовать левую или правую ВМГ с электродвигателями. При выполнении ВМГс ДВС по двухосной схеме реактивный момент будет компенсироваться вращением самих винтов ВМГ с ДВС. При комбинированном режиме полета для взлета частота вращения всех винтов силовой установки увеличивается одинаково. Для полета в сторону - вращение винтов ВМГ с электродвигателями на одной половине аппарата ускоряется, а на другой - замедляется. Одновременно при помощи автомата перекоса ВМГ с ДВС уменьшает угол установки лопастей несущего винта для передней половины плоскости вращения крыла и увеличивает - для задней. Таким образом, сзади подъемная сила увеличивается, а спереди - уменьшается, благодаря чему изменяется наклон винта и появляется движущая сила. Бортовой компьютер силовой установки, соединенный шинной обмена данными с компьютером экранолета, входящего в состав бортового навигационно-пилотажного комплекса экранолета, установленный в корпусе мультикоптера, производит обмен данными с двигателями мультикоптера и определяет оптимальную частоту их вращения в зависимости от характера движения и направления полета экраноплана. Воздушные винты ВМГ с электродвигателями установленные на лучах рамы с возможностью поворота вдоль оси лучей рамы на 360 градусов с использованием с возможностью фиксации, позволяют осуществлять полет мультикоптера в режимах винтокрылых летательных аппаратов - винтокрылов. При этом два повернутых на 90 градусов ВМГ с электродвигателем в передней части могут работать как тянущие воздушные винты, а два других, как толкающие. Или все четыре ВМГ могут работать одновременно, как тянущие или как толкающие. Это обеспечивает возможность увеличения скорости полета, пространственной ориентации фюзеляжа экраноплана относительно направления тяги несущих винтов в неограниченном диапазоне независимо от траектории и режима движения, включая режимы взлета, висения, горизонтального и вертикального полета, посадки. Применение в конструкции мультикоптера несущего воздушного винта ВМГ на с ДВС расположенного на фюзеляже мультикоптера обеспечивается ослабление нежелательных переходных процессов, возникающих при переходе ВМГ с электродвигателями из вертикального положения в горизонтальное при этом переход происходит на постоянной высоте, в полете и не требует подъема или опускания мультикоптера. А на больших скоростях экранного полета управляемая обгонная муфта может отключать несущий воздушный винт ДВС ВМГ от трансмиссии и дальнейший полет идет уже в режиме авторотации, при которой несущий винты работает, на подзарядку аккумуляторов как мультикоптера, так и экраноплана.
Расчеты специалистов показывают, что для экранопланов наиболее рационален движитель типа вертолетного винта, а мультикоптер с несущим воздушным винтом ВМГ с ДВС расположенным на фюзеляже мультикоптера меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости, что как раз создает вертикально направленную подъемную силу, причем в несколько раз большую, чем крыло самолета [15]. В силу этого конструктивное решение внедрить на экраноплане мультикоптерный движитель хотя и вытекает из известных концепций летательных аппаратов, таких как циклокоптер (цикложир) или, однако в новой компоновке применительно к экранному полету обладает новизной, поскольку именно в результате комбинации с «самолетной схемой» возникает новый положительный эффект, позволяющий решить основные проблемные вопросы, касающиеся эффективной стабилизации и безопасности полетов экраноплана.
В данном варианте экраноплан будет работать следующим образом. Перемещение от места базирования до места назначения может осуществляться «по скоростной схеме -винтокрыла» при ориентации средств тяги относительно фюзеляжа, как представлено на фиг.4, при этом используются преимущества летательных аппаратов скоростной винтокрыльной схемы в скорости и экономичности полета [12, 13, 14], а размещение дополнительной ВМГ с ДВС и воздушным винтом на фюзеляже оказывает положительное воздействие на его аэродинамические характеристики по грузоподъемности, скорости и безопасности и расстоянии полета. Подъемная сила при приведении силовой установки в действие начинает начинает вырабатываться даже на стоянке. После отрыва экраноплана от поверхности воздушными винтами силовой установки инициируется подъемная сила, вектор тяги которой направлен вверх, затем после поворота ВМГ с электродвигателями на определенный угол реактивная сила воздушного потока повышает давление позади крыла и за кормой возникает горизонтальная тяга, толкающая экраноплан вперед. Одновременно при движении аппарата во время старта при помощи автомата перекоса ВМГ с ДВС уменьшается угол установки лопастей несущего винта для передней половины плоскости вращения крыла и увеличивает - для задней. Таким образом, сзади подъемная сила увеличивается, а спереди - уменьшается, благодаря чему изменяется наклон винта и появляется движущая сила. По мере увеличения скорости под крылом в набегающем потоке за счет подпора воздуха также возникает заметная подъемная сила, которая возрастает уже за счет увеличения аэродинамического давления экрана.
Таким образом, подъемная сила экраноплана складывается из нескольких составляющих и аппарат в полете опирается не только на «воздушную подушку» экрана, которая зачастую бывает нестабильной, но также поддерживается в воздухе за счет подъемной силы на крыле, и на вращающихся воздушных винтах силовой установки, которые функционируют в более стабильном воздушном пространстве, не ограниченном экраном, что позволяет достигать компромисса в соотношении подъемной силы, возникающей под крылом и над крылом, как на границе экранного полета, так и на режимах экранного и свободного полетов, что в совокупности существенно улучшает летные характеристики аппарата и стабилизирует полет.
Эффект от взаимодействия этих сил выражается в отсутствии или коротком разбеге и пробеге при взлете и посадке экраноплана, а также в возможности применения двигательной установки гораздо меньшей мощности, чем для обычных летательных аппаратов.
Важнейшей аэродинамической характеристикой нагнетателей является зависимость давления от производительности. Компоновка воздушных винтов силовой установки по мультикопторной схеме последовательно друг за другом в сумме существенно повышает тягу силовой установки, в то время как воздушные винты, установленные параллельно (соосные), увеличивают производительность движителей (т.е. объемный расход воздуха) [16]. Этот факт подтверждает, что выбранная схема силовой установки в виде мультикоптера на экраноплане вполне функциональна и пригодна для создания необходимого напора воздуха и придания ему требуемых параметров. Управляемость экранопланом в вертикальной плоскости осуществляется перекладкой горизонтальных воздушных рулей и закрылками, но из-за малого плеча поверхностей управления их действия зачастую бывает недостаточно. В такой ситуации продольная балансировка может строиться еще за счет дросселирования и изменения частоты вращения передних или задних воздушных винтов мультикоптера и воздушного винта ВМГ двигателя внутреннего сгорания, то есть за счет увеличения или уменьшения их подъемной силы. Этими приемами можно более эффективно управлять полетом и на сверхмалых скоростях, и на взлетно-посадочных режимах.
Изменение направления полета в горизонтальной плоскости осуществляется при помощи вертикальных аэродинамических рулей, элеронов и закрылков, а также дифференцированием тяги воздушных винтов мультикоптера, уменьшая обороты с одной стороны борта и увеличивая с другой. Эти приемы позволяют создать достаточный для управления момент в каналах крена, расширяют диапазон маневренности, позволяют снизить инерционность при поворотах, уверенно и с малым креном входить в вираж и выходить из него, что делает машину устойчивее и безопаснее. Кроме того, замедлением вращения передних и задних воздушных винтов ВМГ с электрическими двигателями при соответствующих углах их установки относительно лучей рамы возможно осуществлять торможение.
При заходе на посадку, когда в связи с замедлением скорости движения происходит ослабление действия «воздушной подушки» экрана, снижается подъемная сила под крылом, что может привести к возникновению пикирующего момента. В случае возникновения подобной или иной нештатной ситуации подъемная сила на вращающихся винтах силовой установки позволит повысить коэффициент подъемной силы аппарата, сгладив тем самым отрицательные моменты и стабилизировать полет, обеспечивая безопасную посадку.
Заявленный экраноплан с двигательной установкой, выполненной по схеме мультикоптера, отличается от типовых летательных аппаратов существенными преимуществами:
- применение на силовой установке, выполненной в виде мультикоптера на экраноплане с возможностью ее отделения от экраноплана и полета в качестве ЛА с экипажем или дистанционно;
- взлет и посадка по-вертолетному;
- способность летать на малой высоте с минимальной скоростью над любым типом поверхности или зависать над ней;
- высокая устойчивость в турбулентных потоках воздуха и маневренность;
- компактность, высокая прочность и надежность;
- экономичность;
- возможность создавать экранопланы различного целевого назначения: пассажирский, грузовой, комбинированный, а также многоцелевой военный ЛА;
- возможность использования ВМГ с ДВС для зарядки аккумуляторов ЛА мультикоптера и (или) экраноплана в полете, что делает ЛА незаменимым над водной поверхностью в районах тундры, степей, пустынь и других открытых, малонаселенных районов;
- способен создавать достаточно плотную воздушную подушку и хорошо планирует.
Важное достоинство экраноплана и в том, что ему не нужна специальная силовая установка для создания тяги, так как воздушные винты силовой установки могут выполнять функции по созданию подъемной силы и горизонтальной тяги, а мощность двигателей максимально преобразуется в полезную работу.
В силу указанных положительных факторов, конструктивное решение использовать силовую установку на основе мультикоптера в компоновке экраноплана типа «самолетного типа» вполне рационально, поскольку сочетание преимуществ и результативности каждого из них позволяет добиться оптимальных летных характеристик и обеспечивает высокий уровень управляемости и устойчивости движения по высоте, тангажу и крену, что соответствует техническому результату, на достижение которого направлено изобретение.
При необходимости аппарату можно придать непотопляемость, оборудовав в корпусе герметичные отсеки плавучести или заполнив их легким пористым материалом. Управление экранопланом требует определенных навыков, поэтому необходима специальная подготовка пилотов, кроме того, часть функций можно механизировать - помимо специальных измерительных приборов установить, например, бортовую ЭВМ, которая поможет выбрать оптимальную скорость и другие параметры полета, контролировать расход топлива и т.д., можно оборудовать аппарат автоматической системой навигации и управления движением, которая сможет поддерживать горизонтальное положение и высоту полета в автоматическом режиме и другими средствами автоматизации.
Список используемых источников
1. Н.И. Белавин «Экранопланы», 1977 г., изд. «Судостроение», Ленинград, стр. 19.
2. Н.И. Белавин «Экранопланы», 1977 г., изд. «Судостроение», Ленинград, стр. 29.
3. Н.И. Белавин «Экранопланы», 1977 г., изд. «Судостроение», Ленинград, стр. 32.
4. Статья «Аэродинамика экраноплана», http://vairboat.fatal.ru/wigs.htm
5. «Физические особенности экранного эффекта. Продольная устойчивость экраноплана»; http:ekranoplan-ru.narod.ru/c31.htm
6. Н.И. Белавин «Экранопланы», 1977 г., изд. «Судостроение», Ленинград, стр. 193-194.
7. Ежи Бень «Модели и любительские суда на воздушной подушке», Ленинград, изд. «Судостроение», стр. 79.
8. «Физические особенности экранного эффекта», http:/ekranoplan-ru.narod.ru/c3l.htm
9. Н.И Белавин «Экранопланы», 1977 г., изд. «Судостроение», Ленинград, стр. 225.
10. Ежи Бень «Модели и любительские суда на воздушной подушке», Ленинград, изд. «Судостроение», стр. 78.
11. Н.И Белавин «Экранопланы». 1977 г., изд. «Судостроение», Ленинград, стр. 58, 68.
12. Самолет вертикального взлета и посадки. Патент США №3037721 А, МПК В64С 29/00, 05.06.1962.
13. Вертолет. Патент РФ на изобретение №2263049. МПК В64С 27/52, 27.10.2005. 6.9. Богданов Ю.С., Михеев Р.Л. Конструкция вертолетов. М.: Машиностроение, 1990; URL: http://xaribda.ru/node/68. Дата обращения 27.09.2018.
14. Ружинский Е.И. Американские самолеты вертикального взлета, URL: http://coolib.eom/b/l28556/read. Дата обращения 27.09.2018.
15. «Физические особенности экранного эффекта. Особенности силовых установок экраноплана», http:/ekranoplan-ru.narod.ru/c3.htm [В.И. Меркулов, «Гидродинамика знакомая и незнакомая», Москва, «Наука», 1989 г., стр. 56].
16. Ежи Бень «Модели и любительские суда на воздушной подушке», Ленинград, изд. «Судостроение», стр. 35, 37.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| Наземная высокоскоростная транспортная система, включающая многофункциональный магистральный экранолет | 2017 |
|
RU2677215C1 |
| Воздушная транспортная система | 2021 |
|
RU2764036C1 |
| Экранолёт | 2019 |
|
RU2729114C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЭКРАНОПЛАНА И ЭКРАНОПЛАН, РЕАЛИЗУЮЩИЙ СПОСОБ | 1995 |
|
RU2097269C1 |
| ЭКРАНОПЛАН | 2012 |
|
RU2550568C2 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| ЭКРАНОЛЕТ | 2005 |
|
RU2333854C2 |
| ГИДРОСАМОЛЕТ С ЭКРАННЫМ ЭФФЕКТОМ | 2012 |
|
RU2532658C2 |
Изобретение относится к летательным аппаратам на воздушной подушке. Экраноплан с двигательной установкой, выполненной по схеме мультикоптера (2), содержит фюзеляж (1), крылья (3), силовую двигательную установку, органы управления. Силовая двигательная установка установлена на верхней плоскости корпуса и представляет собой мультикоптер, на котором установлена винтомоторная группа (ВМГ) с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями. Указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, позволяющая осуществлять полет в вертолетном режиме. Достигается оптимизация летных характеристик, повышение устойчивости и управляемости. 3 з.п. ф-лы, 4 ил.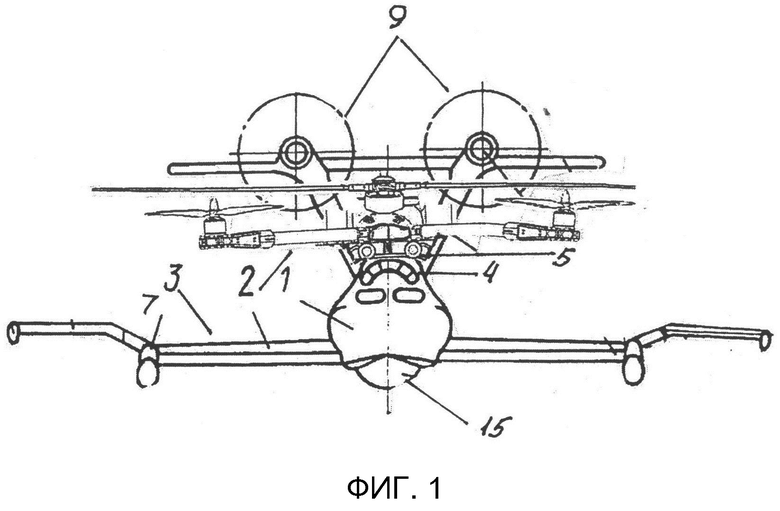
1. Экраноплан с двигательной установкой, выполненной по схеме мультикоптера, содержащий фюзеляж, крылья, силовую двигательную установку, органы управления, отличающийся тем, что его силовая двигательная установка, установленная на верхней плоскости корпуса, представляет собой мультикоптер, на котором установлена ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, позволяющая осуществлять полет в вертолетном режиме.
2. Экраноплан по п. 1, отличающийся тем, что мультикоптер может совершать самостоятельный полет как в пилотируемом режиме, так и как беспилотный летательный аппарат.
3. Экраноплан по п. 1, отличающийся тем, что в корпусе силовой двигательной установки может размещаться кабина для экипажа.
4. Экраноплан по п. 1, отличающийся тем, что воздушные винты ВМГ с электродвигателями, установленные на лучах рамы мультикоптера с возможностью поворота вдоль оси лучей рамы на 360 градусов с использованием с возможностью фиксации, позволяют осуществлять полет в режимах мультикоптера, а совместно с ВМГ с ДВС и в режимах винтокрылых летательных аппаратов-винтокрылов.
| ЭЛЕКТРОМОТОРНЫЙ ЭКРАНОПЛАН-АМФИБИЯ | 2019 |
|
RU2737406C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ЛАВВП), ГИБРИДНАЯ ЭЛЕКТРОСИЛОВАЯ УСТАНОВКА (ГЭУ) ДЛЯ ЛАВВП И СПОСОБ ФУНКЦИОНИРОВАНИЯ ЛАВВП С ГЭУ (ВАРИАНТЫ) | 2019 |
|
RU2715823C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1993 |
|
RU2012512C1 |
| JP 7069295 A, 14.03.1995. | |||

