Изобретение относится к области авиации, а именно к летательным аппаратам, и предназначено для перевозки грузов и пассажиров, для опыления садов и полей, для охраны лесов и заповедников, как скорая помощь в труднодоступных районах.
Известны летательные аппараты, имеющие вертолетные несущие винты с большим диаметром, которые отбрасывают огромное количество воздуха с относительно небольшой скоростью, состоящие из корпуса, силовых установок, системы навигации, системы управления полетом. Это наиболее экономичное средство вертикального взлета и на режимах висения не имеет конкурентов среди вертикально взлетающих аппаратов.
Недостатком известных аппаратов является большой удельный вес силовой установки и низкое аэродинамическое качество, уменьшающееся с ростом скорости полета и ограничивающее его дальность и скорость, кроме того, невозможно использовать огромные несущие винты для скоростных вертикально взлетающих аппаратов.
Известны летательные аппараты вертикального взлета и посадки, содержащие корпус, крылья, силовую установку с самолетными винтами относительно небольшого диаметра, систему навигации, систему управления полетом.
Так называемый «Винтокрыл» обладает достоинствами вертолета на режимах висения, может иметь в 1,5-2 раза большую скорость и дальность.
Недостатком данного летательного аппарата является сложность конструкции, низкая весовая отдача, низкая эффективность вертикального взлета, обусловленная большим расходом рабочего тела при низкой скорости истечения.
Известны турбореактивные самолеты вертикального взлета и посадки, содержащие корпус, крылья, силовую установку, систему управления, навигационную систему. Двигатели турбореактивного самолета позволяют получить высокое отношение тяги к массе силовой установки. Получить большую тягу при минимальной массе чрезвычайно важно для самолетов вообще, а для вертикально взлетающего самолета в особенности, потому что чем больше масса двигателя, тем большая часть его тяги расходуется лишь на то, чтобы поднять самого себя.
Недостатком данной конструкции является большая скорость истечения газов, низкая экономичность, большой расход топлива, кроме того, турбореактивные самолеты требуют наличия взлетно-посадочной полосы с твердым покрытием и сложны в управлении в режиме взлета и посадки.
Известны спортивные самолеты классической схемы, включающие корпус, крыло, двигатель, систему управления, навигационную систему.
В данных самолетах струя воздуха от винта обдувает примерно 10- 20% поверхности крыла. За счет обдувки увеличивается местная скорость обтекания крыла, что вызывает увеличение коэффициента подъемной силы Су на 10-20%. Чем меньше скорость полета, тем больше ощутим эффект обдувки крыла винтами вследствие большой разницы местных скоростей потока на обдуваемых участках крыла. В отдельных случаях полета подъемная сила самолета за счет работы винта может увеличиваться на 15-20%. Следовательно, при работающем двигателе самолет может держаться в воздухе на скорости, меньшей, чем с неработающим двигателем.
Недостатком спортивных самолетов классической конструкции является низкая экономичность, низкое аэродинамическое качество и низкая весовая отдача.
Известны разработки самолетов «Шорт Снорт (Short Snort)» и «Джимми Крикет (Jimini Criket)», состоящие из корпуса, крыльев, силовых установок, систем навигации, систем управления, в которых вектор тяги двигателя направлялся над верхней поверхностью крыла, что позволяло самолету класса истребителя ограничить пробег при взлете всего несколькими сотнями футов. Для этой цели использовалась система трубопроводов и отверстий, которые направляли поток выхлопных газов подобно вееру над верхней поверхностью крыла. Благодаря данному техническому решению удавалось развивать гигантскую подъемную силу при очень небольших скоростях.
Недостатком этих решений является то, что система трубопроводов, позволяющая добиться данного эффекта, оказалась очень тяжелой.
Известны самолеты конструкции «Святослав», состоящие из корпуса, крыльев, силовых установок, систем навигации, систем управления, у которых использовался обдув части крыла небольшого размаха. Данный самолет показал супермалые скорости сваливания, весьма впечатляющие полеты на малых скоростях и очень высокую маневренность.
Недостатком этого технического решения является малая весовая отдача.
Техническим результатом предлагаемого решения является повышение весовой отдачи, увеличение подъемной силы, повышение аэродинамического качества, изменение вектора тяги в диапазоне на 360°, обеспечение безопасности полета, повышение маневренности, а также снижение расхода топлива.
Поставленный технический результат достигается тем, что предлагаемый летательный аппарат вертикального взлета и посадки содержит корпус обтекаемой формы, по меньшей мере, одно крыло, выполненное в виде кольца и имеющее в плане форму круга, овала, многогранника, а в сечении профиль круга, расположенное внутри и/или снаружи корпуса, внутри корпуса расположены силовая установка, маховик в виде полого диска, снабженного клапанами дистанционного управления, система управления, состоящая из рулей управления по направлению и рулей управления по крену и тангажу и вектору тяги, выполненных в виде профилированных колец и расположенных симметрично относительно друг друга и оси корпуса, которые дополнительно снабжены струйными и/или щелевыми соплами и шторками-щитками, при этом силовая установка включает в себя, по меньшей мере, один двигатель и, по меньшей мере, одно вентиляторное устройство или турбовентиляторный двигатель и эжекторное устройство, корпус обтекаемой формы содержит одну или несколько секций и дополнительно снабжен регулирующими устройствами дистанционного управления, расположенными по периметру в нижней части корпуса и представляющими собой клапаны, кингстоны, задвижки, крыло выполнено с большим удлинением с профилем максимального аэродинамического качества, определяемым по формуле К=Су/Сх=45-65, крыло представляет собой кольцо, имеющее в плане форму круга, овала, многогранника и имеющее в сечении профиль крыла, летательный аппарат вертикального взлета и посадки дополнительно содержит кабину пилота, расположенную внутри или снаружи корпуса и выполненную с возможностью отстыковки от корпуса и осуществления самостоятельного полета.
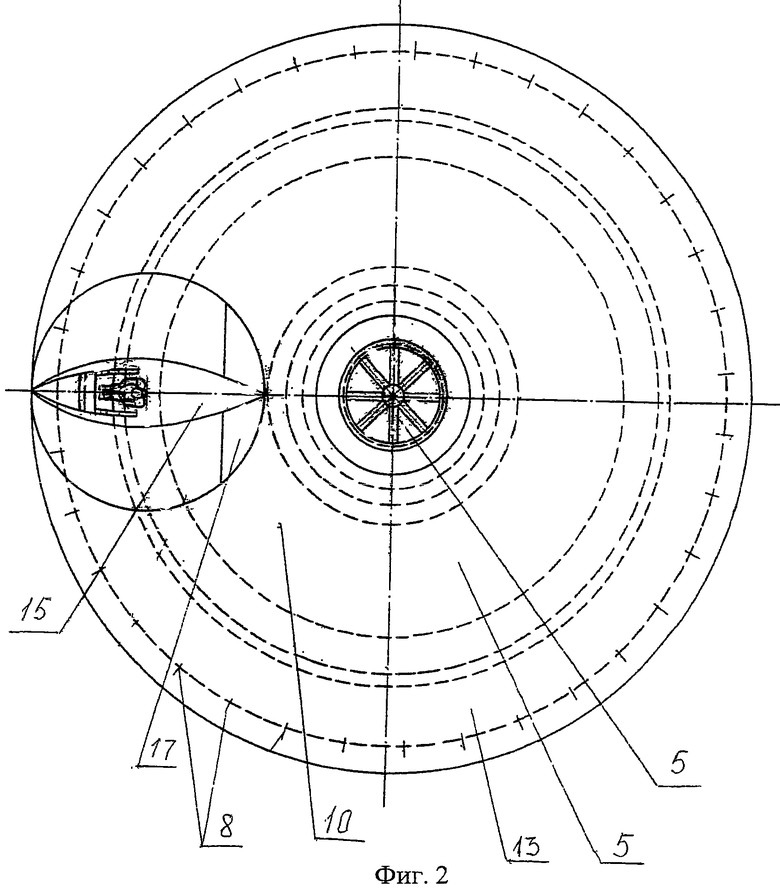
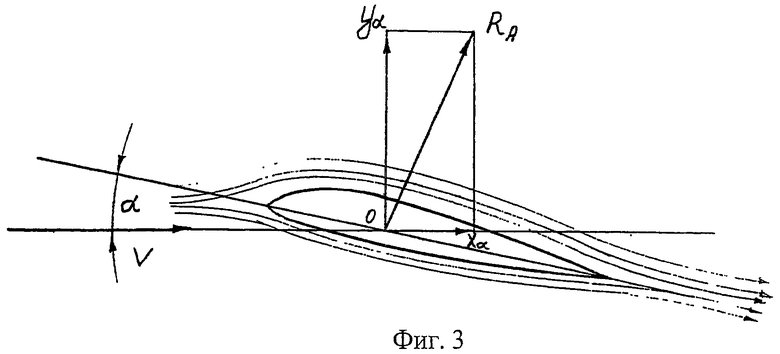
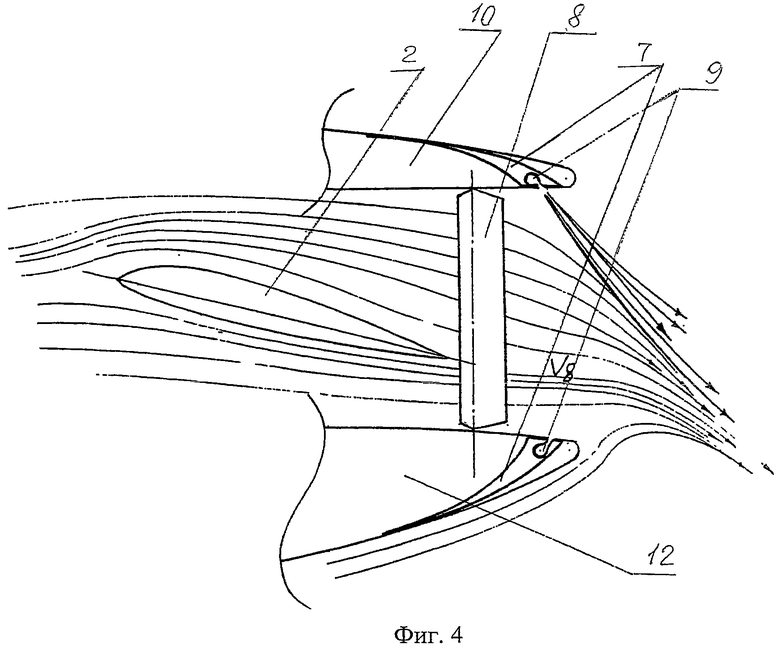
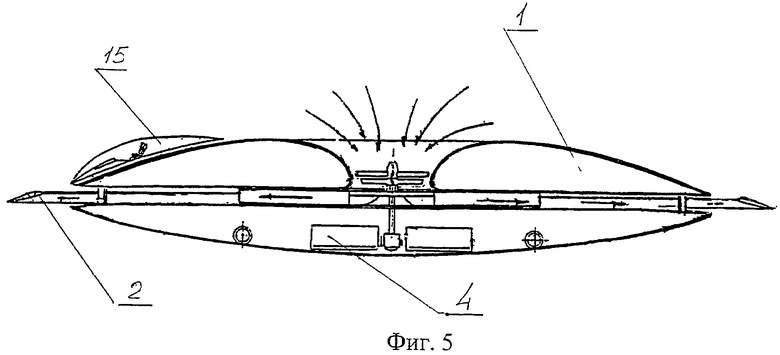
На фиг.1 изображен разрез летательного аппарата вертикального взлета и посадки с многосекционным корпусом, на фиг.2 изображен вид сверху летательного аппарата вертикального взлета и посадки с многосекционным корпусом, на фиг.3 изображена схема возникновения аэродинамических сил при обтекании крыла воздухом, на фиг.4 изображена схема воздействия щелевидных и/или струйных сопел на скоростной поток воздуха, исходящего по всему периметру летательного аппарата вертикального взлета и посадки, на фиг.5 изображен разрез летательного аппарата вертикального взлета и посадки с односекционным корпусом.
Летательный аппарат вертикального взлета и посадки (далее по тексту - ЛА) содержит корпус обтекаемой формы 1, по меньшей мере, одно крыло 2, расположенное внутри и/или снаружи корпуса 1.
Корпус 1 обтекаемой формы выполнен с возможностью создания воздушного потока внутри ЛА.
Корпус 1 обтекаемой формы выполнен, например, дискообразной формы, овалообразной формы, многогранной формы, формы в виде профиля крыла и т.п. и состоит, по меньшей мере, из одной секции.
Корпус 1 дополнительно снабжен регулирующими устройствами дистанционного управления, представляющими собой клапаны дистанционного управления, кингстоны дистанционного управления, задвижки дистанционного управления.
Внутри корпуса 1 расположены силовая установка, маховик 3, представляющий собой полый диск, снабженный клапанами дистанционного управления (на фиг. не показано), система управления.
Крыло 2 выполнено с большим удлинением с профилем максимального аэродинамического качества, определяемым по формуле К=Су/Сх=45-65 для создания максимальной подъемной силы, и имеет замкнутую форму или разомкнутую форму (разделенные на сектора). Крыло 2 представляет собой кольцо, имеющее в плане форму круга, овала, многогранника, а в сечении - профиль крыла. Крыло 2 установлено под углом атаки, при которым коэффициент подъемной силы имеет максимальную величину.
Диск-маховик 3 выполнен из сверхпрочных композитных материалов и предназначен для создания гироскопического эффекта - кариолисовой силы. Для этого во внутреннюю полость диска-маховика подается жидкость, которая, в свою очередь, на любом этапе полета ЛА имеет возможность быть мгновенно спущена через клапаны дистанционного управления, расположенные по периметру диска-маховика 3. Диск-маховик 3 имеет возможность использоваться для создания завесы-облака вокруг ЛА или распыления какой-либо жидкости.
Силовая установка ЛА включает в себя, по меньшей мере, один двигатель 4 и, по меньшей мере, одно вентиляторное устройство 5 или турбовентиляторный двигатель 4 и эжекторное устройство 6.
Двигатель 4 представляет собой, например, ДВС, турбореактивный, реактивный, дизель и т.п.
Вентиляторное устройство 5 представляет собой, например, осевое вентиляторное устройство, турбовентиляторное устройство, центробежное вентиляторное устройство, осевую турбину и т.п.
Система управления включает в себя рули управления по вектору тяги, крену и тангажу (элевоны) 7, а также рули управления по направлению 8.
Рули управления 7 по тангажу и крену выполнены в виде профилированных сплошных колец или сегментов кольца, расположенных симметрично относительно друг друга и оси корпуса по внутреннему периметру. Рули управления 7 по крену и тангажу выполняют функции управления вектором тяги, работают в скоростном высоконапорном потоке воздуха, создаваемом силовой установкой 4 и 5, а также дополнительно эжекторными устройствами 6, засасывающими воздух, проходящий через корпус 1.
Рули управления по крену и тангажу 7 дополнительно снабжены струйными и/или щелевыми соплами 9, размещенными по всему внешнему периметру обоих колец 7, выполняющими в заданных режимах вспомогательные и дублирующие функции рулей управлений по тангажу и крену 7.
Для эффективного управления вектором тяги рули управления 7 по тангажу и крену дополнительно оборудованы шторками-щитками (на фиг. не показано), работающими в автоматическом режиме.
На фиг.1 представлен ЛА, где корпус 1 выполнен многосекционным, имеющим верхнюю 10, среднюю 11 и нижнюю 12 секции.
В многосекционном корпусе 1 верхняя секция 10 выполняет функцию воздушного канала, внутри которого расположены осевая турбина 5, крылья 13, 14, выполненные, например, кольцеобразной формы, перфорированными по верхней поверхности, рули управления по направлению 8 и рули управления по тангажу и крену 7, выполняющие также функции вектора тяги.
В центре в средней секции 11, выполняющей функции воздушного канала, расположен центробежный вентилятор 5, эжекторные устройства 6, крыло 2, выполненное, например, кольцеобразной формы, перфорированное по верхней поверхности, диск-маховик 3.
В нижней секции 12 расположены грузопассажирский отсек, моторный отсек и т.д. При этом сам моторный и грузопассажирский отсеки отделены от остальных отсеков и загерметизированы.
Воздух в грузопассажирский отсек подается по каналам (на фиг. не показано), которые выведены в полую часть кольцеобразных, перфорированных по верхней поверхности крыльев 13,2, что позволяет затягивать срыв ламинарного потока верхней поверхности крыла 13,2, препятствуя тем самым его торможению и преждевременному отрыву, и расширяет диапазон беспрерывного обтекания. Кроме этого, воздух подается из заборного устройства (на фиг. не показано) в корпусе 1.
Это позволяет увеличить дальность полета ЛА и снизить расход топлива.
При многосекционном выполнении корпуса 1 одно кольцо-элевон 7 расположено в верхней секции 10 с возможностью сверху наполовину перекрывать под заданным углом воздушный канал средней секции 11. Другое кольцо-элевон 7 расположено в нижней секции 12 с возможностью снизу перекрывать под заданным углом наполовину воздушный канал средней секции 11, тем самым полностью перекрывая воздушные каналы корпуса 1 средней 11 и нижней 12 секции.
Оба кольца-элевона 7 могут работать автономно, независимо друг от друга или синхронно для создания или изменения от 0 до 360 градусов (относительно оси ЛА) вектора тяги, что вместе с рулями управления по направлению придает ЛА сверхманевренность.
Струйные и/или щелевые сопла 9 обеспечивают струйный и/или плоский потоки воздуха, вытекающего с большой скоростью под углом θ° к нижней 12 и верхней 10 поверхности секций. За счет истечения струи воздуха увеличивается эффективная площадь корпуса 1, изменяется характер обтекания профиля, кроме того, за счет импульса вытекающей струи (mVc) создается вертикальная составляющая силы (mVc sinθ), разгружающая корпус 1.
Например, эффективность реактивного закрылка зависит от коэффициента импульса выдуваемой струи и угла 9. Для приближенных расчетов приращения коэффициента подъемной силы при реактивном закрылке можно воспользоваться следующей интерполяционной формулой: Δсу≈3,9 √cµ sinθ.
Применение струйных и/или щелевидных сопел 9 (Фиг.4) позволяет получить большие значении коэффициента подъемной силы для ЛА. Воздух к струйным и/или щелевым соплам 9 подается от воздушного компрессора или резервной системы (на фиг. не показано).
Для обдува крыльев 13, 2, 14 применены осевая турбина 5 и центробежный вентилятор или турбовентилятор 5 с использованием устройств эжектирования атмосферного воздуха 6. Это обусловлено тем, что тяга, развиваемая силовой установкой 4, 5 или 4, 6, равна произведению массы отбрасываемого рабочего тела на его скорость в единицу времени. Однако увеличивать скорость рабочего тела ЛА для увеличения, к примеру, вертикальной тяги невыгодно, так как чем больше скорость, тем хуже отношение полученной тяги к мощности двигателей. Мощность используется тем лучше, чем меньше скорость потока воздуха или газов.
Это значит выгоднее и экономичнее отбрасывать большую массу рабочего тела с небольшой скоростью. Поэтому достоинство использования эжекторной установки 6 - это увеличение тяги, на 30% больше суммарной тяги двигателей 4. Исследования и лабораторные испытания известных конструкций показывают способность на каждый килограмм газов, вытекающих из сопла, подсасывать более 7 килограммов воздуха.
В случае, когда корпус 1 выполнен в форме крыла круглого в плане, эта проблема решена за счет большей абсолютной величины допустимого диапазона размещения центра масс (аэродинамического фокуса) и максимальной хорды корпуса-крыла 1.
Самое главное, что конструкция ЛА с крылом 2 или с крыльями 13, 2, 14 внутри и/или снаружи корпуса 1 находится в активном воздушном потоке по всему внутреннему и/или внешнему периметру ЛА. Воздушный поток, в свою очередь, создает дополнительную подъемную силу, как бы увеличивая эффективное удлинение корпуса-крыла 1 и снижая индуктивное сопротивление при полете на малых скоростях, позволяет полностью использовать преимущества корпуса-крыла 1 круглого в плане (применение продольной неустойчивости центра масс за фокусом корпуса 1, как у садящихся птиц, есть частичное решение проблемы. Нам удалось найти принципиально новое решение, исключающее недостатки существующих схем летательных аппаратов - бесхвосток).
Подъемная сила крыльев 13, 2, 14 и корпуса-крыла 1 возникает вследствие несимметричного обтекания его воздушным потоком. Это обтекание образуется в результате наличия несимметричного профиля или угла атаки или одновременно двумя факторами.
Рассмотрим, к примеру, обтекание крыла 2 при положительном угле атаки. На фиг.3 видно, что воздушный поток делится крылом 2 на два потока, которые обтекают нижнюю и верхнюю поверхности крыла 2. При этом струйки воздуха, обтекая верхнюю поверхность крыла 2, поджимаются и сечение их уменьшается. В соответствии с законом непрерывности струи скорость воздушного потока в струйках над верхней поверхностью крыла 2 увеличивается и становится больше скорости воздушного потока струек, обтекающих нижнюю поверхность крыла 2.
В соответствии с законом Бернулли (чем больше скорость движения жидкости в сосуде, тем меньше давление, оказываемое жидкостью на стенки сосуда) давление на нижней поверхности крыла 2 будет больше, чем на верхней поверхности.
Вспомним также, что всякое тело, двигаясь в воздухе (или воздух обдувает тело, как в аэродинамической трубе, в нашем случае - это и есть летающая аэродинамическая труба), испытывает с его стороны воздействие в виде аэродинамической силы, которую можно выразить формулой:
где CRα - безразмерный коэффициент;
ρ - плотность воздуха;
V - скорость тела относительно воздушной среды;
q - скоростной напор;
S - некоторая характерная площадь тела.
При малых скоростях полета (V<100 м/с) коэффициент С Rα определяется только ориентацией тела относительно потока воздуха (углами скольжения) и числом Рейнольдса, учитывающим вязкость воздуха:
Re=Vb/ν, где
b - характерный линейный знак тела;
ν - кинематический коэффициент вязкости.
Полная аэродинамическая сила раскладывается на подъемную силу Yα, направленную перпендикулярно вектору скорости набегающего потока, и силу лобового сопротивления Хα.
Подъемная сила и лобовое сопротивление определяются как
Yα=Cyα q S, Xα=Cxα q S, где
S - площадь крыла в плане;
Cyα, Cxα - коэффициенты соответственно называются коэффициентами подъемной силы и лобового сопротивления.
Отношение величины подъемной силы к величине лобового сопротивления (или их коэффициентов)
- называется аэродинамическим качеством. Максимальное значение аэродинамического качества (Кмах) является мерой аэродинамического совершенства.
Как уже рассматривалось, коэффициент подъемной силы Су по своей физической сущности представляет собой безразмерную величину, приходящуюся на единицу площади крыла 13, 2, 14, 1, отнесенную к единице скоростного напора.
Величина Су характеризует степень использования площади крыла 13, или 2, или 14 и корпуса 1 и скоростного напора для создания подъемной силы.
Подъемная сила крыльев 13, 2, 14 и корпуса 1 возрастает с увеличением его площади. Увеличение площади крыла для скоростных самолетов крайне ограничены - мы же решили эту задачу, разместив обдуваемые крылья 13, 2, 14 внутри и/или снаружи корпуса 1, выполненные с возможностью создания максимальной подъемной силы ЛА.
Крылья 13, 2, 14, находясь внутри воздушных каналов верхней 10 и средней 11 секций под заданными углами атаки при работающих силовых установках 4, 5 или 4, 6, создают максимальную подъемную силу вне зависимости от пространственного положения ЛА, ошибок в пилотировании или сложных условий полета или взлета и посадки, их выход на закритические углы атаки конструктивно и функционально невозможен.
В случае, когда ЛА необходимо закамуфлировать, корпус 1 выполняют в виде закамуфлированного объекта, например в виде дома, беседки, стога сена и т.п.
Предлагаемый ЛА дополнительно содержит кабину пилота 15, расположенную внутри или снаружи корпуса 1 и выполненную с возможностью отстыковки от корпуса 1 и осуществления самостоятельного полета. В случае отстыковки от корпуса 1 кабина пилота 15 используется в качестве самостоятельного мини-летательного аппарата и также содержит мини-двигатель с винтом или мини-турбину (на фиг. не показано), мини-диск - маховик 16, аналогичный конструкции диска-маховика 3, гидромотор (на фиг. не показано), а роль рулей управления по тангажу и крену выполняют элевоны 17, (Фиг.2) - в виде отклоняемой хвостовой части крыла кабины пилота 15 (применяемая на самолетах, не имеющих хвостового горизонтального оперения) и рулей управления по направлению (на фиг. не показано).
В случае, когда кабина пилота 15 расположена на корпусе 1, возникающая несиммертичность обтекания из-за вращения кабины пилота 15 вместе с корпусом 1 парируется положением рулей управления 7 по тангажу и крену, расположенных по всему внутреннему периметру корпуса 1 и продублированных струйными и щелевыми соплами 9 (фиг.4), сжатый воздух к которым подается от воздушного компрессора или из резервной системы.
В случае расположения пилотской кабины 15 внутри корпуса 1 или беспилотного ЛА эти моменты в управлении ЛА отсутствуют.
Летательный аппарат вертикального взлета и посадки работает следующим образом.
Осуществляют запуск силовой установки ЛА на крыльях большого удлинения 13, 2, 14, находящихся в скоростном высоконапорном потоке воздуха.
Для предотвращения преждевременного отрыва ЛА нижнее кольцо-элевон 7 отклоняют вверх. При взлете нижнее кольцо-элевон 7 возвращается в исходное положение и ЛА взлетает. В случае, если ЛА имеет максимальную загрузку (груз), то одновременно с возвращением в исходное положение нижнего кольца-элевона 7 отклоняется вниз верхнее кольцо-элевон 7, тем самым за счет отбрасывания воздушной массы вниз создается дополнительная подъемная сила.
Управление по курсу осуществляют с помощью рулей направления 8, расположенных в средней секции 11 по всему внутреннему периметру корпуса 1. Находясь в воздушном канале средней секции 11, обдуваемые скоростным потоком воздуха, создаваемым работающими силовыми установками 4, 5 или 4, 6, рули управления по направлению 8 имеют максимальную эффективность на любом этапе полета и позволяют осуществлять вращение ЛА вокруг своей вертикальной оси не только во время взлета и посадки, но и во время горизонтального полета. Так как их количество может достигать несколько десятков, то выход из строя некоторого количества никак не скажется на эффективности управления ЛА.
При переходе на режим горизонтального полета ЛА для создания направленного вектора тяги кольца-элевона 7 смыкаются друг с другом, перекрывая при этом любой сектор воздушного канала между верхней 10 и нижней 12 секциями корпуса, превращая противоположный сектор кольца-элевона 7 в щелевое сопло 9. Причем угол смыкания к точке соприкосновения колец-элевонов 7 может меняться в зависимости от условий полета на 360 градусов в любом направлении, совершая оборот вокруг периметра ЛА за время менее одной секунды.
Совмещение функций рулей управления 7 по тангажу и крену с функциями управления вектором тяги придает ЛА вместе с системой управления по направления 8 максимальную маневренность.
В профилированных кольцах-элевонах 7 размещены по всему периметру струйные и/или щелевые сопла 9 (Фиг.4), выполняющие функции вспомогательной и дублирующей системы управления ЛА. При сомкнутых кольцах-элевонах 7 с их внешней стороны открываются резервные воздушные каналы. Во время взлета для предотвращения преждевременного отрыва ЛА скоростной высоконапорный поток воздуха, вырывающийся по всему периметру ЛА в горизонтальном направлении, с помощью рулей управления 7 отклоняют вверх, что создает реактивный момент, частично уравновешивающий величину подъемной силы. Отклонение воздушной струи и/или потока вверх и возникновение при этом рециркуляции воздуха в условиях без аэродромной эксплуатации ЛА препятствует, к примеру, нарушению снежного или травяного покрова.
В случае выхода ЛА на дозвуковые и сверхзвуковые скорости воздушные каналы корпуса 1 перекрываются по всему периметру, кроме каналов для забора воздуха и истечения газов. В случае, если ЛА имеет, по меньшей мере, одно крыло 2, расположенное снаружи, то оно убирается вовнутрь корпуса 1.
В случае, когда крыло 2 расположено снаружи корпуса 1 с возможностью демпфирования от возможных соприкосновений с препятствиями (деревьями, зданиями и т.п.), то оно подпружинено.
Вертикальную посадку осуществляют с помощью рулей управления 7, снижая скорость горизонтального полета до нуля. С помощью нижнего кольца-элевона 7, которое отклоняется вверх на заданную величину, а также за счет уменьшения оборотов силовой установки 4, 5 или 4, 6 посадка ЛА возможна на любую неподготовленную поверхность, в том числе на воду.
При приводнении на водную поверхность ЛА может быстро погрузиться на заданную глубину. Для этого в нижней секции 12 открываются регулирующие устройства дистанционного управления и вода начинает заполнять дифферентные полости, расположенные диагонально относительно друг друга по периметру ЛА.
Кабина пилота 15 выполнена герметичной.
При достижении заданной глубины запорные устройства дистанционного управления в корпусе 1 закрываются, тем самым перекрывают доступ в дифферентные емкости забортной воды и выпуск воздуха.
В случае подводного положения ЛА управление движением ЛА под водой и всплытием осуществляется как из кабины пилота 15, так и из грузопассажирского отсека. Кабина пилота 15 и грузопассажирский отсек загерметизированы. Для подводного передвижения ЛА применяется дизель 18 малой мощности, работающий на воздушно-газовой смеси, находящейся под давлением в баллонах, изготовленных из композитных материалов и представляющих собой часть силовой конструкции нижней секции 12.
ЛА имеет возможность погружаться и передвигаться под водой. Для быстрого всплытия на поверхность используется тот же принцип создания подъемной силы, что и на взлетно-посадочных режимах, с той лишь разницей, что обороты силовой установки 4, 5 или 4, 6 в этом случае могут составить лишь несколько десятков оборотов в минуту, где в качестве привода используется дизель 18 малой мощности, работающий на воздушно-газовой смеси, которая находится под давлением в баллонах, изготовленных из композитных материалов и являющихся частью силового каркаса корпуса 1.
При определенных условиях передвижения под водой, а также полетных условий верхняя секция 10 и нижняя секция 12 могут полностью или частично, поочередно или одновременно, для уменьшения, в частности, лобового сопротивления, перекрывать воздушные каналы верхней 10 и средней 11 секций под любым или нулевым углом друг к другу, при этом кольца-элевоны 7, выполняющие функции рулей управления по тангажу, крену и вектору тяги, расширяют диапазон возможностей ЛА.
В случае отказа дизеля 18 при всплытии из-под воды находящаяся под давлением воздушно-газовая смесь через мини-турбину приводит во вращение вентиляторную установку 5 или непосредственно используется для продувки балласта. Как дублирующая систему управления в виде рулей управления по направлению, по тангажу и крену 7, в полете используется воздушно-газовая смесь, находящаяся под давлением в баллонах, в случае выхода из строя силовых установок 4, 5 или 4, 6, а также для раскрутки через гидромотор диска-маховика 3.
При выходе в полете силовых установок 4, 5 или 4, 6 из строя можно управлять ЛА, зная о его аэродинамических особенностях, взаимным расположением относительно друг друга верхней 10 и нижней 12 секций за счет возникающего в этом случае несимметричного обтекания самого ЛА и резервной системы управления по направлению, тангажу и крену посредством использования находящейся под давлением в баллонах газовоздушной смеси. В случае использования в ЛА силовых установок в виде, например, турбореактивных двигателей при выходе ЛА на околозвуковые или сверхзвуковые скорости крылья 13,2, выполненные в виде замкнутой формы или разомкнутой формы (разделенные на сектора), имеют возможность полностью или частично (по секторам) убираться в специальную нишу 19, регулируемый зазор между средней 11 и верхней 10 секциями корпуса 1 превращается в заборное устройство, а в средней секции 11 превращается в щелевидные сопла 9. Для этого верхняя секция 10 и нижняя секция 12 имеют возможность полностью или частично, поочередно или одновременно перекрывать воздушные каналы средней 11 и верхней 10 секций под углом друг к другу, при этом кольца-элевоны 7 расширяют диапазон возможностей ЛА, например, вектор тяги можно изменять мгновенно на противоположный для экстренного торможения при выполнении того или иного маневра. При работающей силовой установке 4, 5 или 4, 6 создается разряжение воздуха над верхней поверхностью корпуса 1, что ведет к возникновению дополнительной подъемной силы.
Система управления в виде рулей управления 7 по тангажу и крену совмещена с функциями управления вектора тяги и представляет собой два профилированных кольца-элевона 7, расположенных, например, в верхней 10 и нижней 12 секциях по всему внутреннему периметру корпуса 1. Кольца-элевона 7 могу работать автономно независимо друг от друга или синхронно для создания направленного вектора тяги.
Предлагаемое техническое решение имеет принципиально новую конструкцию ЛА с использованием корпуса 1, выполненного, например, в виде крыла малого удлинения - дископлана.
В этом случае корпус-крыло 1 позволяет выполнить полет при больших, чем обычные, углах атаки, и его характерная особенность - срыв потока у корпуса-крыла 1 затягивается до углов 45 градусов (Су мах). Вихревая пространственная система индуцирует на верхней поверхности корпуса-крыла 1 вдоль хорд дополнительную скорость, от чего возрастает разряжение, а следовательно, и дополнительная подъемная сила, которая с избытком компенсирует потери от местных срывов потока вдоль боковых и передних кромок. Такой аэродинамический эффект у корпуса-крыла 1 усиливается с увеличением угла атаки.
В связи с этим корпус-крыло 1 предлагаемого устройства не имеет тенденции сваливания на «крыло», не срывается в штопор, что гарантирует, в свою очередь, медленное и безопасное снижение, аналогичное снижению на парашюте. При взлетно-посадочных режимах корпус-крыло круглое в плане 1 создает мощный эффект воздушной подушки, то есть пока естественным образом ЛА не погасит свою скорость до посадочной, он не сможет приземлиться, что влияет на безопасность полета и на маневренность ЛА.
Немаловажным преимуществом предлагаемого устройства является и то обстоятельство, что финансовые затраты уменьшаются на величину, пропорциональную примерно третьей степени размаха корпуса-крыла 1, а отсутствие горизонтального оперения как самостоятельного агрегата ведет к уменьшению финансовых затрат еще на 10-15%.
Следует отметить, что вообще горизонтальное оперение необходимо неманевренному сверхзвуковому самолету, главным образом, при больших углах атаки (взлет, посадка, выход из срыва и т.п.). В крейсерском полете - функции горизонтального оперения с успехом могут выполнять закрылки-элевоны. Однако при взлете и посадке самолет схемы «бесхвостка» уступает самолету нормальной схемы, так как крыло бесхвостового самолета не допускает механизации. Из условий продольной балансировки крыла его задняя кромка на наивыгоднейшем режиме полета, то есть на скорости, соответствующей минимальной скорости снижения, должна быть приподнята кверху. Это ведет к уменьшению коэффициента балансированной подъемной силы и соответственно к увеличению скорости полета. Предлагаемая конструкция ЛА решает эту задачу.
Предлагаемая конструкция ЛА может быть использовано для перевозки грузов и пассажиров, для опыления садов и полей, для охраны лесов и заповедников, как скорая помощь в труднодоступных районах, как спортивный, учебно-тренировочный аппарат.
Предлагаемая конструкция ЛА позволяет обеспечить высокую маневренность за счет вращения ЛА вокруг вертикальной оси не только во время взлета и посадки, но и во время горизонтального полета, а также за счет изменения вектора тяги в диапазоне 360°, а также за счет создания на крыле или крыльях, находящихся в воздушных каналах корпуса, максимальной подъемной сили вне зависимости от пространственного положения ЛА, ошибок в пилотировании или сложных метеорологических условий, их выход на закритические углы атаки конструктивно и функционально невозможны, что позволяет совершать полеты в труднодоступных местах, среди деревьев, в городе, в горах и т.д.
Более того, предлагаемая конструкция ЛА для достижения абсолютной устойчивости по тангажу и крену во время взлетно-посадочных режимов, а также при большой турбулентности атмосферного воздуха для обеспечения безопасности полета используется в том числе гироскопический эффект диска-маховика 3, выполненного из сверхлегких материалов. Для создания гироскопического эффекта - кариолисовой силы подается незамерзающая жидкость, которая, в свою очередь, на любом этапе полета ЛА имеет возможность быть мгновенно спущена через электромагнитные клапаны дистанционного управления, расположенные по периметру диска-маховика 3. В случае выхода силовых установок 4, 5 или 4, 6 из строя используется кинетическая энергия диска-маховика 3, а в случае выхода системы управления 7, 8 используют привод от воздушной турбины, работающей на воздушно-газовой смеси, находящейся под давлением в баллонах.
Немаловажным преимуществом предлагаемой конструкция ЛА является и то обстоятельство, что финансовые затраты уменьшаются на величину, пропорциональную примерно третьей степени размаха крыла, а отсутствие горизонтального оперения как самостоятельного агрегата ведет к уменьшению финансовых затрат еще на 10-15%.
Конструкция ЛА, предусматривающая расположение крыла (крыльев) внутри и/или снаружи корпуса, позволяет многократно увеличить обдуваемую площадь крыла (крыльев), вследствие чего подъемная сила ЛА увеличивается кратно площади крыла (крыльев).
Конструкция ЛА позволяет его эксплуатацию в безаэродромных условиях, в любых климатических условиях и в любое время суток.
Отсутствие в ЛА вращающихся и отклоняющихся частей, расположенных на корпусе, повышает безопасность полета и маневренность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493053C1 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| СПОСОБ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И ЗАВИСАНИЯ САМОЛЕТА В ВОЗДУХЕ | 2016 |
|
RU2656934C2 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| Способ вращения цилиндров, выполняющих роль крыльев на летательных аппаратах, и беспилотный летательный аппарат для его осуществления | 2024 |
|
RU2826746C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2422309C1 |
Изобретение относится к области авиации, а именно к летательному аппарату вертикального взлета и посадки. Летательный аппарат содержит корпус обтекаемой формы, крыло, выполненное в виде кольца и расположенное внутри и/или снаружи корпуса. Внутри корпуса расположены маховик в виде полого диска, снабженный клапанами дистанционного управления, силовая установка, состоящая из одного двигателя и из одного вентиляторного устройства или турбовентиляторного двигателя, а также эжекторного устройства. Также летательный аппарат содержит систему управления, состоящую из рулей управления по направлению, по вектору тяги, по крену и тангажу, выполненных в виде профилированных колец и расположенных симметрично относительно друг друга, и оси корпуса. Технический результат заключается в увеличении подъемной силы, снижении расхода топлива и улучшении маневренности летательного аппарата. 12 з.п. ф-лы, 5 ил.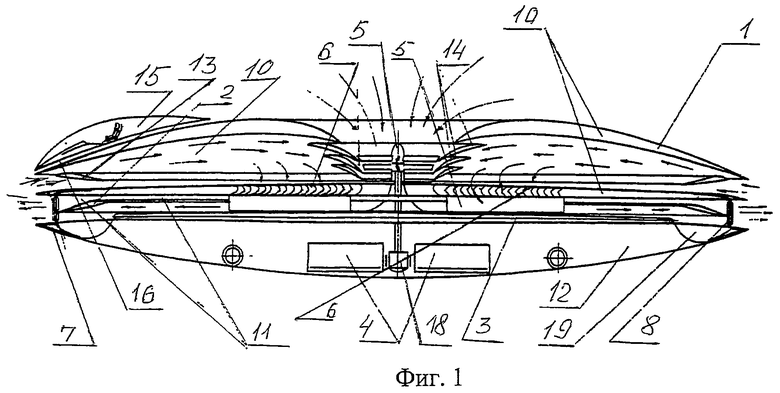
1. Летательный аппарат вертикального взлета и посадки, содержащий корпус обтекаемой формы, по меньшей мере, одно крыло, выполненное в виде кольца, расположенное внутри и/или снаружи корпуса, внутри корпуса расположены маховик в виде полого диска, снабженный клапанами дистанционного управления, силовая установка, состоящая, по меньшей мере, из одного двигателя и, по меньшей мере, из одного вентиляторного устройства или турбовентиляторного двигателя и эжекторного устройства, система управления, состоящая из рулей управления по направлению, по вектору тяги, по крену и тангажу, выполненных в виде профилированных колец и расположенных симметрично относительно друг друга и оси корпуса.
2. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что корпус обтекаемой формы содержит одну или несколько секций.
3. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что профилированные кольца дополнительно снабжены струйными и/или щелевыми соплами.
4. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что профилированные кольца дополнительно снабжены шторками-щитками.
5. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что крыло выполнено с большим удлинением с профилем максимального аэродинамического качества, определяемым по формуле К=Су/Сх=45-65.
6. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что крыло, выполненное в виде кольца, имеет в плане форму круга, а в сечение имеет профиль крыла.
7. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что крыло, выполненное в виде кольца, имеет в плане форму овала, а в сечение имеет профиль крыла.
8. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что крыло, выполненное в виде кольца, имеет в плане форму многогранника, а в сечение имеет профиль крыла.
9. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что он дополнительно снабжен кабиной пилота, расположенной внутри или снаружи корпуса и выполненной с возможностью отстыковки от корпуса и осуществления самостоятельного полета.
10. Летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что корпус дополнительно снабжен регулирующими устройствами дистанционного управления, расположенными по периметру в нижней части корпуса.
11. Летательный аппарат вертикального взлета и посадки по п.10, отличающийся тем, что регулирующие устройства дистанционного управления представляет собой задвижки дистанционного управления.
12. Летательный аппарат вертикального взлета и посадки по п.10, отличающийся тем, что регулирующие устройства дистанционного управления представляет собой клапаны дистанционного управления.
13. Летательный аппарат вертикального взлета и посадки по п.10, отличающийся тем, что регулирующие устройства дистанционного управления представляет собой кинстоны дистанционного управления.
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2348567C2 |
| Летательный аппарат | 1990 |
|
SU1838180A3 |
| US 3753539 А, 21.08.1973 | |||
| Летательный аппарат | 1990 |
|
SU1799334A3 |
| US 4807830 А, 28.02.1989. | |||

