Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения местоположения источников радиоизлучения (ИРИ), сведения о которых отсутствуют в базе данных (например, государственных радиочастотных служб или государственных служб надзора за связью). Изобретение может быть использовано при поиске местоположения несанкционированных средств радиосвязи, как возможных источников помех связи.
Известны способы определения координат ИРИ, в которых используются пассивные пеленгаторы в количестве не менее трех, центр тяжести области пересечения выявленных азимутов которых на фронт прихода волны принимается за оценку местоположения. Основными принципами работы таких пеленгаторов являются амплитудные, фазовые и интерферометрические [1, 2]. К их недостаткам следует отнести высокую степень сложности антенных систем, коммутационных устройств и наличие многоканальных радиоприемников, а также необходимость в быстродействующих системах обработки информации.
Наличие в федеральных округах государственной радиочастотной службы взаимосвязанных через центральный пункт разветвленной сети радиоконтрольных постов, оборудованных средствами приема радиосигналов, измерения и обработки их параметров, позволяет дополнить их функции и задачами определения местоположения тех ИРИ, сведения о которых отсутствуют в базе данных, не прибегая к использованию сложных и дорогостоящих пеленгаторов. Известен способ [3], заключающийся в приеме сигналов источников радиоизлучений в полосе частот ΔF перемещающимся в пространстве измерителем. При перемещении измерителя измеряют уровни сигналов в n (n≥4) точках, последовательно вычисляют n уровней сигнала, по вычисленным отношениям строят n круговых линий положения и определяют координаты источников радиоизлучения как точку пересечения n круговых линий положения. Для повышения достоверности определения местоположения используют статистику. Основным недостатком этого аналога является его не реализуемость, так как так найти точку пересечения n>2 круговых линий положения нельзя.
Известен угломерно-корреляционный способ оценивания местоположения наземных источников радиоизлучения [4]. Угломерно-корреляционный способ оценивания координат местоположения наземных источников радиоизлучения (ИРИ), заключающийся в том, что на борту самолета-пеленгатора одновременно измеряют собственные координаты местоположения х(k), угол курса ψ(k), пеленг ИРИ (φи(k)), отличающийся тем, что бортовая вычислительная система (БВС) осуществляет разбиение участка местности вокруг ИРИ с грубо определенными прямоугольными координатами хц, zц на I×J прямоугольников с координатами центров xi, zi; для каждого прямоугольника и всех точек пеленгации рассчитывают ожидаемые значения пеленгов, затем осуществляют поиск элементарного участка местности возможного местоположения ИРИ, которому соответствует совокупность измеренных значений пеленгов определяют текущее местоположение ИРИ по величине функционала качества, характеризующего степень соответствия текущей измеренной совокупности пеленгов и их ожидаемых расчетных значений, соответствующих элементарным участкам местности, координаты которых известны, при этом в качестве функционала качества используется экстремум взаимно-корреляционной функции реализации φи(k) и φij(k), определяющий совпадение текущего местоположения ИРИ с измеренным элементарным участком местности, координаты которого известны, или взвешенные суммы квадратов разностей текущих измеренных и расчетных значений пеленгов φи(k) и φij(k), при этом критерием совпадения текущей реализации пеленгов и их расчетных значений является минимум функционала качества 
Недостатки этого аналога:
1. Способ рассчитан только на применение на борту самолета-пеленгатора,
2. Требует измерения собственных координат местоположения самолета-пеленгатора,
3. Требует предварительного грубого определения местоположения ИРИ,
4. Требует разбиения участка местности вокруг предполагаемого местоположения ИРИ,
5. Требует измерения пеленгов на каждый участок местности возможного местоположения ИРИ.
Известно также техническое решение [5], которое относится к радиолокации, в частности, к определению местоположения источников радиоизлучений. Техническим результатом является обеспечение возможности определения координат источников радиоизлучений однопозиционной наземной радиолокационной станцией и независимо от условий местности.
Указанный технический результат достигается также тем, что в радиолокационной станции, содержащей пассивный канал обнаружения, включающий последовательно соединенные антенну и приемник, а также блок вычисления координат, содержащий последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени и устройство вычисления координат.
Суть способа состоит в следующем. Для определения координат источника радиоизлучения используют два канала: пассивный и активный каналы обнаружения. Вся система размещена на одной позиции.
Антенна пассивного канала обнаружения направлена на источник и принимает его прямое радиоизлучение. Для измерения дальности до источника радиоизлучения с угловыми координатами ∈И (угол места) и βИ (азимут) используется объект, отражающий радиоизлучение этого источника При этом с помощью активного канала обнаружения работающего в пассивном режиме, осуществляются операции поиска, обнаружения и измерения угловых координат (угла места - ∈О и азимута - βО) объекта, отражающего излучение, коррелированное с прямым излучением (т.е. осуществляется поиск отражающего объекта). По положению максимума взаимной корреляционной функции излучений, принятых двумя каналами обнаружения, определяют величину временного сдвига Δt этих излучений.
После чего осуществляется зондирование направления с координатами ∈O, βO и измеряется дальность R0 до объекта, при необходимости уточняются координаты ∈O, βO.
Недостатками этого аналога являются:
1. Способ может применяться только к цифровым (дискретным) видам связи.
2. Необходимы два канала: активный и пассивный, что совершенно недопустимо в военных условиях применения из-за демаскирования средства.
3. Необходимость измерения сдвига принимаемых сигналов во времени требует системы жесткой синхронизации.
4. Необходимо осуществлять операции поиска, обнаружения и измерения угловых координат (угла места - ∈О и азимута - βО) объекта, отражающего излучение.
Существенно ближе к предлагаемому способу, является [6].
Способ [6] относится к пассивным системам радиоконтроля и предназначен для определения координат источников радиоизлучений УКВ-СВЧ диапазонов, использующих цифровые (дискретные) виды сигналов из одного РКП. Способ определения местоположения ИРИ основан на измерении направления на ИРИ, оценке относительной временной задержки, с последующим вычислением координат ИРИ, как точки пересечения линии направления на источник и гиперболической линии положения. Все измерения производятся на одном приемном пункте. При этом, оценка относительной временной задержки определяется путем вычисления времени расхождения прихода сигнала от источника относительно опорной временной шкалы, сформированной на основе оценки временной структуры сигнала источника, местоположение которого полагается известным, определяемой на основе сравнения оценок расхождения времени прихода сигналов по времени от источников с известным и оцениваемым местоположением, функционирующих в единой системе синхронизации цифровыми (дискретными) видами сигналов.
Недостатками способа являются:
1). Способ распространяется только на цифровые (дискретные) виды средств связи с четко выраженным периодом следования импульсов тактовой (цикловой) синхронизации, функционирующие в единой системе синхронизации, временные параметры которой и точность их определения существенно влияют на оценку относительной временной задержки, а, следовательно, и точность определения координат искомого ИРИ.
2) Отсутствует решение по повышению точности оценки определения координат искомого ИРИ, например, путем увеличения числа корреспондентов из состава радиосети и усреднения результатов вычисления координат искомого ИРИ применительно к каждому из корреспондентов радиосети;
3) Должна быть априорно известна (либо доступна оцениванию) частотно-временная структура сигнала (частота (период) следования импульсов тактовой (цикловой) синхронизации). При этом, оценивание частотно-временной структуры сигнала приводит к появлению дополнительной погрешности вычисления координат искомого ИРИ и появлению дополнительных временных и аппаратурных затрат при внедрении способа.
4) Область применения способа ограничивается тем, что для реализации способа необходимо иметь:
а) особое радиоприемное устройство, в котором дополнительно должен быть введен автокоррелятор,
б) пеленгатор, удовлетворяющий требованиям по достаточной точности пеленгования, исходя из точности определения координат искомого ИРИ.
Наиболее близким по своей технической реализуемости к заявляемому способу является способ [7], выбранный за прототип.
Способ определения координат местоположения источников радиоизлучения, основанный на измерении параметров радиоизлучений в нескольких точках пространства сканирующими радиоприемными устройствами и преобразованных в систему уравнений окружностей равных отношений, отличающийся тем, что для измерения параметров радиоизлучений используют N, не менее четырех, стационарных радиоконтрольных постов, расположенных не на одной прямой, один из которых принимают за базовый, снабжая его дополнительным специальным программным обеспечением и соединяя с остальными N-1 постами линиями связи, на всех постах осуществляют квазисинхронное сканирование по заданным фиксированным частотам настройки, усредняют полученные значения уровней сигналов на каждой из сканируемых частот, а затем на базовом посту для каждого из сочетаний C4N (сочетаний из N по 4) на основании обратно пропорциональной зависимости отношений расстояний от поста до источника радиоизлучения и соответствующих им разностей уровней сигналов, выраженных в дБ, составляют три уравнения, каждое из которых описывает окружность равных отношений, по параметрам двух любых пар которых и определяют текущее среднее значение широты и долготы местоположения источника радиоизлучения.
Основными недостатками прототипа являются:
1. Необходимость иметь не менее 4-х СРКП, требующих обеспечения радиосвязи между ними, что снижает надежность и эффективность такой системы определения КМПИРИ, а также демаскирует параметры ее функционирования и местоположение перед иностранной радиоразведкой.
2. Нет простого решения по повышению точности определения КМПИРИ, например, путем калибровки и статистических накоплений. Целью настоящего изобретения является разработка способа определения координат местоположения ИРИ, не требующего дополнительных аппаратных затрат для его реализации на существующих радиоконтрольных постах Радиочастотной службы Российской Федерации, в котором устранены недостатки прототипа.
Эта цель достигается с помощью признаков, указанных в формуле изобретения, общих с прототипом: способ определения координат местоположения источников радиоизлучения (КМПИРИ), основанный на измерении параметров искомого источника радиоизлучений (ИРИ) на одном радиоконтрольном посту (РКП) и вычислении тех же параметров в точках, местоположение которых полагается известным, отличающийся тем, что, измеряют азимут ϕ на ИРИ, применяя РКП с логопериодической поворотной антенной системой (ЛПАС), задают координаты местоположения J виртуальных постов (ВП) на расстоянии в несколько угловых минут от РКП, составляют перечень из i базовых РЭС (i БРЭС), записанных в базе данных РЭС используемого РКП и расположенных в секторе утроенного среднего квадратического отклонения измеренного азимута ϕ, вычисляют азимуты ϕ с РКП и ψj с каждого из ВП на i БРЭС, формируют J корреляционных аппроксимированных полиномами зависимостей азимутов ψj (КЗА) на i БРЭС с каждого из j ВП от азимутов ϕ, отсортированных по возрастанию, как аргументов, на i БРЭС с РКП, формируют также  корреляционных зависимостей азимутов ψj на i БРЭС для j ВП между собой, сортируя аргументы по возрастанию и аппроксимируя получаемые КЗА, как функции, полиномами, а затем, создают калибровочные характеристики (КХ) для каждой j пары РКП/ВП и
корреляционных зависимостей азимутов ψj на i БРЭС для j ВП между собой, сортируя аргументы по возрастанию и аппроксимируя получаемые КЗА, как функции, полиномами, а затем, создают калибровочные характеристики (КХ) для каждой j пары РКП/ВП и  пар для j ВП по азимуту (КХА), для чего измеряют азимут с РКП на каждый из i БРЭС, вычисляют разность значений измеренных азимутов и значений вычисленных азимутов по координатам на те же i БРЭС и получают
пар для j ВП по азимуту (КХА), для чего измеряют азимут с РКП на каждый из i БРЭС, вычисляют разность значений измеренных азимутов и значений вычисленных азимутов по координатам на те же i БРЭС и получают  КХА, как зависимостей этой разности, представляющих величину ошибки определения азимутов от измеренных для каждого j ВП, затем по i измеренным азимутам на каждый из i БРЭС и
КХА, как зависимостей этой разности, представляющих величину ошибки определения азимутов от измеренных для каждого j ВП, затем по i измеренным азимутам на каждый из i БРЭС и  КХА, определяют азимуты на эти же i БРЭС с каждого j ВП, составляют уравнения азимутальных лучей, исходящих с РКП и j ВП на i БРЭС и переопределяют координаты последних, как координаты пересечения
КХА, определяют азимуты на эти же i БРЭС с каждого j ВП, составляют уравнения азимутальных лучей, исходящих с РКП и j ВП на i БРЭС и переопределяют координаты последних, как координаты пересечения  пар лучей, направленных на каждый из i БРЭС, определяют КХ каждой пары РКП/ВП и пар текущего BПn<j с ВЦj по широте (КХШ) и долготе (КХД), как зависимостей разностей значений истинных широт и долгот i БРЭС и их вычисленных значений от вычисленных значений широт и долгот, и лишь затем по измеренному на искомый ИРИ азимут вычисляют КМПИРИ, аналогично переопределению КМП i БРЭС, используя, как КЗА для J пар РКП/jВП, так и
пар лучей, направленных на каждый из i БРЭС, определяют КХ каждой пары РКП/ВП и пар текущего BПn<j с ВЦj по широте (КХШ) и долготе (КХД), как зависимостей разностей значений истинных широт и долгот i БРЭС и их вычисленных значений от вычисленных значений широт и долгот, и лишь затем по измеренному на искомый ИРИ азимут вычисляют КМПИРИ, аналогично переопределению КМП i БРЭС, используя, как КЗА для J пар РКП/jВП, так и  пар текущего поста ВПn<j/ВПj, корректируют вычисленные КМПИРИ, используя КХШ и КХД соответствующих пар, усредняют
пар текущего поста ВПn<j/ВПj, корректируют вычисленные КМПИРИ, используя КХШ и КХД соответствующих пар, усредняют  откорректированных значений КМПИРИ и фиксируют их, как окончательные.
откорректированных значений КМПИРИ и фиксируют их, как окончательные.
Задача определения координат местоположения источника радиоизлучения с одной позиции может быть решена при использовании виртуального(ных) поста(ов). По известным координатам основного и виртуального(ных) поста(ов), измеренном азимуте на искомый ИРИ с основного поста и вычисленным на виртуальном(ных) посте(ах), азимуте на искомый ИРИ могут быть определены координаты местоположения ИРИ (КМПИРИ).
Для определения КМПИРИ априори должна быть известна несущая частота его радиоизлучений, что достигается (для любых методов) на этапе сканирования диапазонов или полос частот с определенным шагом радиоприемным устройством или с помощью спектроанализатора, позволяющего точнее определить значение несущей частоты в полосе радиоизлучения ИРИ. Для осуществления способа используем детерминистскую модель со следующими допущениями:
1. Используем уравнения распространения сигналов в свободном пространстве [1].
2. Параметры и характеристики приемников постов радиотехнических измерений идентичны, а их изменения, а также изменения параметров и характеристик наблюдаемых РЭС и условий распространения сигналов на интервале измерений отсутствуют.
Принцип действия способа поясняется иллюстрациями, приведенными на:
Фиг. 1. Расположение РКП, j ВП, i БРЭС, искомый ИРИ,
Фиг. 2. Корреляционные зависимости азимутов на БРЭС с ВП1-ВП10 от азимутов с РКП,
Фиг. 3. Корреляционные зависимости азимутов на БРЭС с ВП5- ВП10 от азимутов с ВП4,
Фиг. 4. Корреляционные зависимости азимутов на БРЭС с ВП9-ВП10 от азимутов с ВП8,
Фиг. 5. Пересечение азимутальных лучей для определения КМПИРИ,
Фиг. 6. Калибровочная характеристика пары РКП/ВП по азимуту,
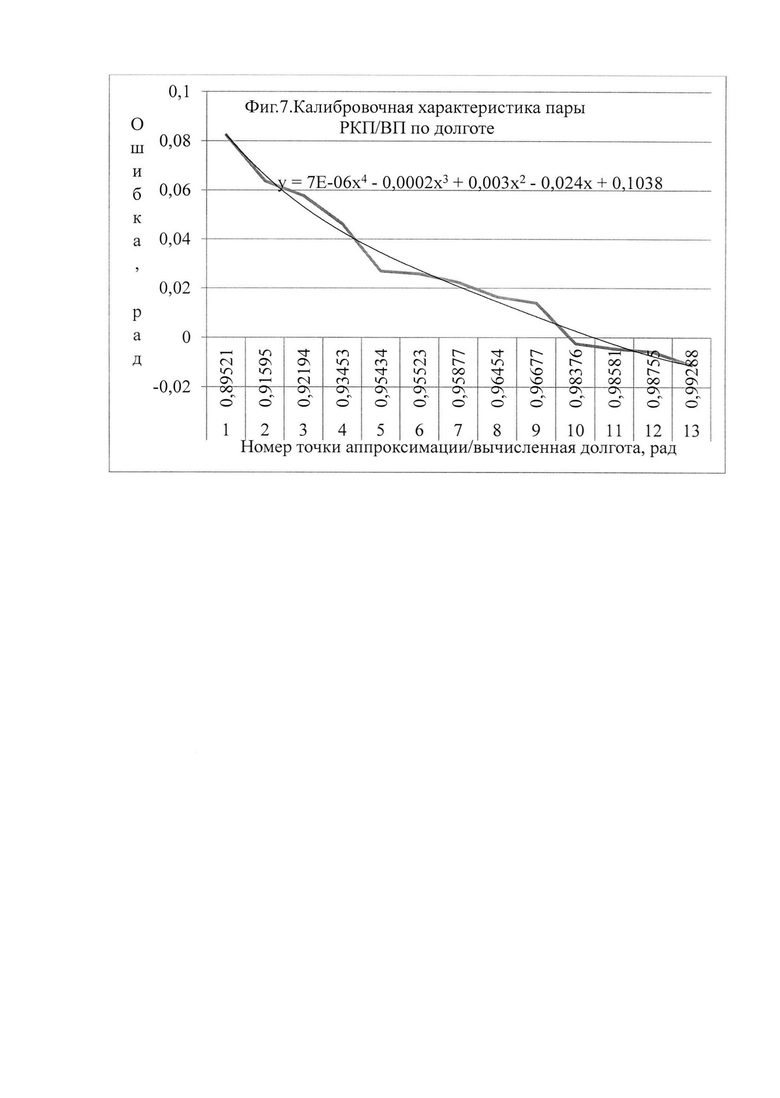
Фиг. 7 - Калибровочная характеристика пары РКП/ВП по широте,
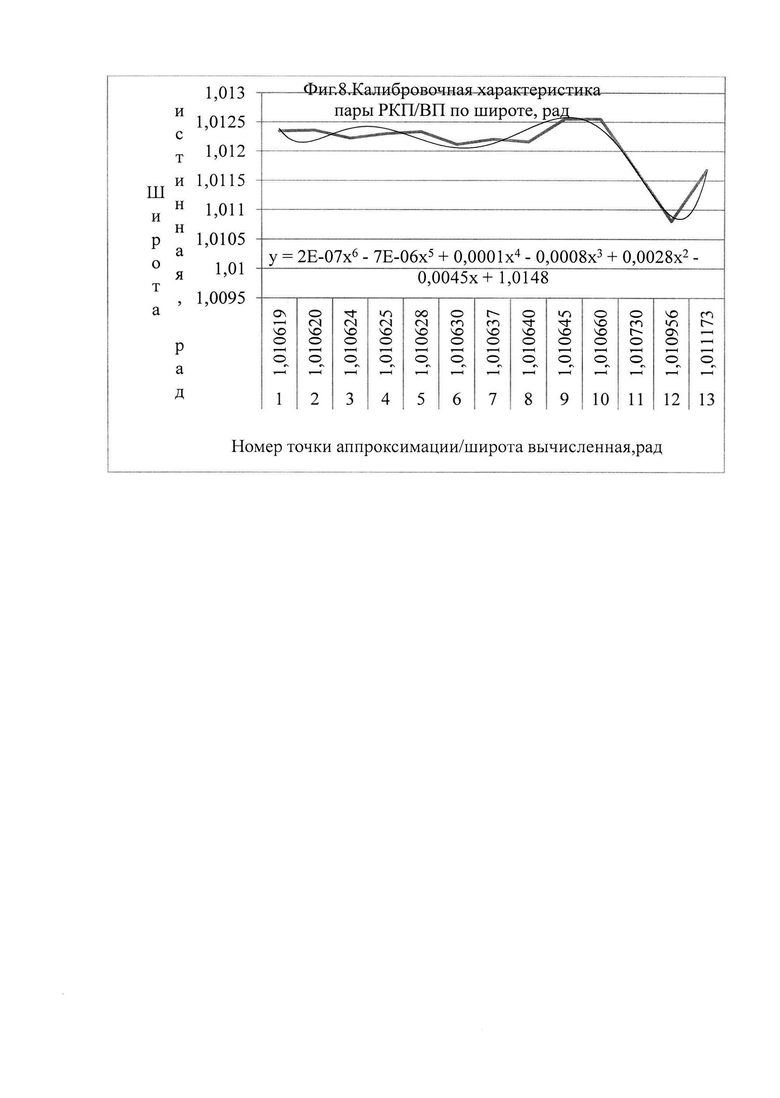
Фиг. 8 - Калибровочная характеристика пары РКП/ВП по долготе.
Способ основан на 4-х принципах:
1. на корреляционной зависимости между азимутами ϕ и ψ, взятыми на какую либо точку I(х,y) из разнесенных точек А(xa,ya) и В(xb,yb) пространства,
2. на формировании калибровочных характеристик измеряемых (или вычисляемых параметров ИРИ,
3. на корректировке вычисляемых параметров ИРИ,
4. на статистической обработке измеряемых(вычисляемых) вычисляемых параметров ИРИ.
1. Несложно показать, что тангенсы азимутов ϕ и ψ, взятых на точку I: ϕ - из точки А, ψ - из точки В связаны линейной зависимостью: tan ψ = С + Д tan ϕ, где С и Д являются функциями координат А, В и I. Для множества точек I связь уже не будет функциональной, так как координаты этого множества точек I задают по случайному закону. Поэтому взаимосвязь азимутов ϕ и ψ для массива точек будет корреляционной. Установив эту корреляционную зависимость азимутов (КЗА) между точками А и В для массива точек I (а это точки местоположения РЭС), можно использовать КЗА для вычисления азимута на искомую точку I из другой точки В по измеренному азимуту из точки А на искомый ИРИ (точка I с неизвестными координатами, которые и нужно определить).
В предложенном способе для измерения азимутов используется только один РКП. Для определения КМПИРИ применено несколько дополнительных постов - виртуальных. Координаты ИРИ, выявленного в результате сканирования диапазона частот в процессе радиоконтроля, как претендента на поиск, находят, как усредненные координаты точек пересечения азимутальных лучей с измеренным азимутом ϕ от РКП и вычисленными азимутами ψ со всех j ВП на ИРИ. На фиг. 1. приведен пример размещения РКП, 10-ти ВП и 13-ти БРЭС с двумя азимутальными лучами с РКП на искомые ИРИ. Все i БРЭС для формирования КЗА из базы данных РКП о РЭС выбирают расположенными в секторе трех СКО многократно измеренного и усредненного азимута на искомый ИРИ. Азимут же с j ВП для получения КМПИРИ вычисляют по результату измерения азимута ϕ на РКП и с использованием корреляционных зависимостей азимутов (КЗА), полученных в результате расчета азимутов по координатам i базовых РЭС (i БРЭС), занесенных в базу данных применяемого РКП. На фиг. 2. приведены 10 корреляционных зависимостей азимутов (КЗА) с ВП1-ВП10 от отсортированных по возрастанию азимутов с РКП на i БРЭС. Каждая зависимость аппроксимирована полиномом 6-й степени, позволяющим вычислить азимут ψ на искомый ИРИ с соответствующего ВП по измеренному на РКП азимуту ϕ. Ниже в таблице приведены коэффициенты корреляции r, поясняющие пример на фиг. 1., и указывающие на тесноту связей азимутов, как с ВП и РКП так и азимутов между всеми десятью ВП.
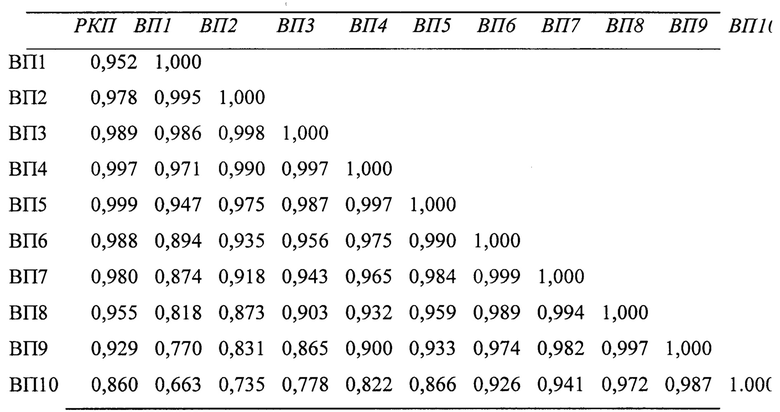
Так как коэффициенты корреляции достаточно высокие не только между азимутами на ИРИ с РКП и ВП (см первый столбик коэффициентов)), но высокие и между виртуальными постами ВП1-ВП10, то и в расчете КМПИРИ используют все сочетания  КХА для получения азимутов со всех ВП, имеющих r>0,6. При использовании КЗА для сочетаний виртуальных постов производят перерасчет азимутов с каждого из ВП, опираясь на измеренные с РКП азимуты на ИРИ. Поясняет сказанное фиг. 3 и фиг. 4. Так на фиг. 3 для определения азимутов на ИРИ с ВП5-ВП10 по азимутам с ВП4 используют его значения ψ=0,92, отмеченное на фиг. 2 синим кружком и пунктирной сноской на ось ординат, как вычисленное значение по измеренному значению ϕ=0,93 на РКП. А на фиг. 4 для определения азимутов на ИРИ с ВП9-ВП10 по азимутам с ВП8 используют его значения ψ=0,57, указанные на фиг. 2 синим кружком и штрихпунктирной сноской на ось ординат, как вычисленное значение по измеренному значению ϕ=0,93 на РКП. При построении таких графических изображений КЗА ВП от азимутов с других ВП значения последних перед аппроксимацией сортируют по возрастанию.
КХА для получения азимутов со всех ВП, имеющих r>0,6. При использовании КЗА для сочетаний виртуальных постов производят перерасчет азимутов с каждого из ВП, опираясь на измеренные с РКП азимуты на ИРИ. Поясняет сказанное фиг. 3 и фиг. 4. Так на фиг. 3 для определения азимутов на ИРИ с ВП5-ВП10 по азимутам с ВП4 используют его значения ψ=0,92, отмеченное на фиг. 2 синим кружком и пунктирной сноской на ось ординат, как вычисленное значение по измеренному значению ϕ=0,93 на РКП. А на фиг. 4 для определения азимутов на ИРИ с ВП9-ВП10 по азимутам с ВП8 используют его значения ψ=0,57, указанные на фиг. 2 синим кружком и штрихпунктирной сноской на ось ординат, как вычисленное значение по измеренному значению ϕ=0,93 на РКП. При построении таких графических изображений КЗА ВП от азимутов с других ВП значения последних перед аппроксимацией сортируют по возрастанию.
Уравнения азимутальных лучей с РКП на ИРИ с азимутом ϕ и с ВП на ИРИ с азимутом ψ запишем в виде: 
 ,
,
Предварительные значения КМПИРИ определяют, как координаты точки пересечения азимутальных лучей (1), то есть, как результат решения системы. Фигура 5 поясняет получение этой точки пересечения. На фиг. 5. приведены точки А(xa,ya) и В(xb,yb) с размещением в них РКП и ВП соответственно. От каждой точки идут азимутальные лучи: под измеренным азимутом ϕ с РКП и вычисленным по КЗА азимутом ψ на ИРИ. Точка пересечения дает КМПИРИ. Решением системы уравнений (1) получают долготу x и широту y в виде:

2. Известно, что все результаты измерений и, естественно, вычислений с использованием результатов измерений включают случайную и систематическую ошибки. Следовательно, и полученный результат вычисления КМПИРИ будет содержать ошибку. Для ее снижения предусматривают калибровку способа по калибровочной характеристике азимутов (КХА): РКП (КХА РКП) и ВП (КХА ВП), а также калибровочные характеристики пар РКП/ВП по вычисляемым координатам: долготе (КХД) и широте (КХШ). Для получения КХА РКП измеряют на РКП азимуты на i БРЭС, принятые за эталонные, перечень которых составляют при формировании КЗА, как это описано выше. Затем, по координатам вычисляют азимуты с РКП на i БРЭС. По разности измеренных на РКП азимутов и вычисленных получают величину ошибки измерения азимутов или калибровочную характеристику РКП (КХА РКП), которую аппроксимируют для удобства использования. Пример такой КЗА приведен на фиг. 6. Затем, получают калибровочную характеристику каждого j ВП (КХА ВП). Для чего, по координатам каждого ВП и i БРЭС вычисляют азимуты на i БРЭС с j ВП. По результатам же вычисления азимутов с j ВП на i БРЭС, используя измеренные на РКП азимуты на те же i БРЭС и полученную ранее КЗА пары РКП/ВП, вычисляют азимуты на соответствующие j ВП. По разности вычисленных азимутов с j ВП на i БРЭС (на основе на измеренных на РКП азимутов и КЗА) и вычисленных по координатам азимутов получают величину ошибки вычисления азимутов с j ВП i БРЭС, то есть получают калибровочную характеристику каждого j ВП (КХА ВП). Эта калибровочная характеристика походит на приведенную на фиг.6. Для получения КХД и КХШ каждой пары РКП/ВП и ВП/ВП по измеренным с РКП азимутам и вычисленным азимутам ВП на i БРЭС составляют уравнения азимутальных лучей на каждый из i БРЭС. В результате решения систем уравнений для каждой пары РКП/ВП и ВП/ВП получают переопределенные координаты i БРЭС. По разности вычисленных долгот (x) и широт (y) и истинных долгот и широт по базе данных для i БРЭС, вычисленных по координатам азимутов, получают величину ошибки вычисления координат i БРЭС, то есть получают калибровочные характеристики (КХ) пар РКП/ВП и ВП/ВП, приведенные на фиг. 7 (КХД- по долготе) и фиг. 8. (КХШ - по широте)., как зависимости разности истинных координат (широты и долготы) и вычисленных, то есть величины ошибки определения КМП i БРЭС от вычисленных. Эти КХА, КХД и КХШ, полученные по результатам вычисления азимутов и КМП i БРЭС распространяют на конечные результаты измерения и вычисления, как азимутов ИРИ, так и КМПИРИ.
3. Корректировку вычисленных азимутов и предварительных КМПИРИ выполняют, используя полученные КХА, КХШ и КХД по результатам вычисления азимутов и КМП i БРЭС путем алгебраического суммирования вычисленных азимутов и КМПИРИ с величиной соответствующей ошибки.
4. Откорректированные значения КМПИРИ по всем парам РКП/ВП и ВП/ВП затем усредняют и фиксируют усредненные откорректированные значения, как окончательные.
Предложенный способ, по принципу работы и отсутствию средств радиосвязи для своего функционирования, является пассивным, наиболее скрытным и, следовательно, наименее уязвимым для обнаружения средствами радиоразведки. Способ, для своей реализации, является предельно минимальным по количеству оборудования, размещенном на одной позиции. Способ позволяет без каких-либо затрат, только путем увеличения количества виртуальных постов, повышать точность определения КМПИРИ.
Таким образом, предложенный способ позволяет устранить недостатки прототипа и определять КМПИРИ. Отсутствие принципиальных ограничений по быстродействию, низкая стоимость внедрения способа, не требующего дополнительных аппаратных затрат для его реализации на существующих радиоконтрольных постах Радиочастотной службы Российской Федерации, прозрачность алгоритма определения местоположения ИРИ, как радикального центра окружностей равных отношений, свидетельствует о высокой технико-экономической эффективности предложенного способа.
Источники информации
1. Справочник по радиоконтролю. Международный союз электросвязи. - Женева: Бюро радиосвязи. 2002. - 585 с.
2. Корнеев И.В., Ленцман В.Л. и др. Теория и практика государственного регулирования использования радиочастот и РЭС гражданского применения. Сборник материалов курсов повышения квалификации специалистов радиочастотных центров федеральных округов. Книга 2. - СПб.: СПбГУТ. 2003.
3. Патент RU №2306579, опубл. 20.09.2007 г.
4. Угломерно-корреляционный способ оценивания координат местоположения наземных источников радиоизлучения. Патент РФ №2458358. Авторы: Верб B.C., Гандурин В.А., Косогор А.А., Меркулов B.И., Миляков Д.А. Тетеруков А.Г., Чернов B.C.
5. Способ определения координат источника радиоизлучения и радиолокационная станция для его реализации. Патент РФ №2217773 Автор(ы): Беляев Б.Г., Голубев Г.Н., Жибинов В.А., Кисляков В.И., Лужных C.Н.
6. Способ местоопределения источников радиоизлучений. Патент РФ №2248584 С2. Автор(ы): Лузинов В.А. (RU), Устинов К.В. (RU).
7. Способ определения координат местоположения источников радиоизлучений. Патент РФ №2423721 С2. Авторы: Логинов Ю.И., Екимов О.Б.
8. РЕКОМЕНДАЦИЯ МСЭ-R Р.525-2* (* 3-я Исследовательская комиссия по радиосвязи внесла в 2000 году в настоящую Рекомендацию редакционные поправки в соответствии с Резолюцией МСЭ-R 44) Расчет ослабления в свободном пространстве.
9. Проектирование и анализ радиосетей. Описание и инструкция по эксплуатации. Ярославль, 2009.






Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения координат местоположения источников радиоизлучения (КМПИРИ) УКВ-СВЧ диапазонов как цифровых, так и аналоговых видов связи, сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы). Технический результат - определение КМПИРИ одним постом радиоконтроля (РКП). В основе способа лежит корреляционный принцип, заключающийся в вычислении азимутов с дополнительной(ных) точки(ек) на ИРИ по измеренным (или вычисленным) значениям азимутов с РКП на ИРИ. При этом азимут ИРИ на РКП измеряют, а в дополнительной(ных) точке(ках) вычисляют. В качестве дополнительной точки используют виртуальный пост (ВП), координаты которого задают. При использовании j ВП их размещают не на одной прямой с РКП, а относят от него на несколько угловых минут. Способ основан. на корреляционной зависимости между азимутами ϕ и ψ, взятыми на какую либо точку I(x,y) из разнесенных точек А(xa,ya) и В(xb,yb) пространства; на формировании калибровочных характеристик измеряемых (вычисляемых) параметров ИРИ;. на корректировке вычисляемых параметров ИРИ; на статистической обработке измеряемых (вычисляемых) параметров ИРИ. 8 ил.
Однопозиционный корреляционно-угломерный способ определения координат источников радиоизлучения, основанный на измерении параметров искомого источника радиоизлучений (ИРИ) на одном радиоконтрольном посту (РКП) и вычислении тех же параметров в точках, местоположение которых полагается известным, отличающийся тем, что, измеряют азимут φ на ИРИ, применяя РКП с логопериодической поворотной антенной системой (ЛПАС), задают координаты местоположения J виртуальных постов (ВП) на расстоянии в несколько угловых минут от РКП, составляют перечень из i базовых РЭС (i БРЭС), записанных в базе данных РЭС используемого РКП и расположенных в секторе утроенного среднего квадратического отклонения измеренного азимута φ, вычисляют азимуты φ с РКП и ψj с каждого из ВП на i БРЭС, формируют J корреляционных аппроксимированных полиномами зависимостей азимутов ψj (КЗА) на i БРЭС с каждого из j ВП от азимутов φ, отсортированных по возрастанию, как аргументов, на i БРЭС с РКП, формируют также  корреляционных зависимостей азимутов (КЗА) ψj на i БРЭС для j ВП между собой, сортируя аргументы по возрастанию и аппроксимируя получаемые КЗА, как функции, полиномами, а затем, создают калибровочные характеристики (КХ) для каждой j пары РКП/ВП и
корреляционных зависимостей азимутов (КЗА) ψj на i БРЭС для j ВП между собой, сортируя аргументы по возрастанию и аппроксимируя получаемые КЗА, как функции, полиномами, а затем, создают калибровочные характеристики (КХ) для каждой j пары РКП/ВП и  пар BПn<j/BПj по азимуту (КХА), для чего измеряют азимут с РКП на каждый из i БРЭС, вычисляют разность значений измеренных азимутов и значений вычисленных азимутов по координатам на те же i БРЭС и получают
пар BПn<j/BПj по азимуту (КХА), для чего измеряют азимут с РКП на каждый из i БРЭС, вычисляют разность значений измеренных азимутов и значений вычисленных азимутов по координатам на те же i БРЭС и получают  КХА, как зависимостей этой разности, представляющих величину ошибки определения азимутов, от измеренных азимутов для каждого j ВП, затем по i измеренным азимутам на каждый из i БРЭС и
КХА, как зависимостей этой разности, представляющих величину ошибки определения азимутов, от измеренных азимутов для каждого j ВП, затем по i измеренным азимутам на каждый из i БРЭС и  КЗА, определяют азимуты на эти же i БРЭС с каждого j ВП, составляют уравнения азимутальных лучей, исходящих с РКП и j ВП на i БРЭС и переопределяют координаты последних, как координаты пересечения
КЗА, определяют азимуты на эти же i БРЭС с каждого j ВП, составляют уравнения азимутальных лучей, исходящих с РКП и j ВП на i БРЭС и переопределяют координаты последних, как координаты пересечения  пар лучей, направленных с РКП и j ВП на каждый из i БРЭС, определяют КХ каждой пары РКП/ВП и пар BПn<j/ВП) по широте (КХШ) и долготе (КХД), как зависимостей разностей значений истинных широт и долгот i БРЭС и их вычисленных значений от вычисленных значений широт и долгот, и лишь затем по измеренному на искомый ИРИ азимуту вычисляют КМПИРИ, аналогично переопределению КМП i БРЭС, используя как J КЗА для пар РКП/jВП, так и
пар лучей, направленных с РКП и j ВП на каждый из i БРЭС, определяют КХ каждой пары РКП/ВП и пар BПn<j/ВП) по широте (КХШ) и долготе (КХД), как зависимостей разностей значений истинных широт и долгот i БРЭС и их вычисленных значений от вычисленных значений широт и долгот, и лишь затем по измеренному на искомый ИРИ азимуту вычисляют КМПИРИ, аналогично переопределению КМП i БРЭС, используя как J КЗА для пар РКП/jВП, так и  для пар BПn<j/ВПj, корректируют вычисленные КМПИРИ,
для пар BПn<j/ВПj, корректируют вычисленные КМПИРИ,
используя КХШ и КХД соответствующих пар, усредняют  откорректированных значений КМПИРИ и фиксируют их, как окончательные.
откорректированных значений КМПИРИ и фиксируют их, как окончательные.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2423721C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| US 5625364 A, 29.04.1997 | |||
| US 7952521 B2, 31.05.2011 | |||
| US 6791493 B1, 14.09.2004 | |||
| WO 2013085587 A1, 13.06.2013. | |||

