Заявляемые объекты объединены единым изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения источников радиоизлучений (ИРИ) с летно-подъемного средства (ЛПС), в частности, с беспилотного летательного аппарата (БЛА).
Известны различные реализации триангуляционного способа местоопределения ИРИ с ЛПС (см. Южаков В.В. Современные методы определения местоположения источников радиоэлектронного излучения // Зарубежная радиоэлектроника, №8, 1987, стр.67-69). В предлагаемых вариантах реализации триангуляционного местоопределения измеряется азимут θ на ИРИ, а систематические ошибки в измерениях частично устраняются путем использования особенностей различных траекторий полета ЛПС.
Основными недостатками способов-аналогов являются:
низкая точность определения местоположения ИРИ в связи с тем, что в точках измерения θ не учитываются такие важные параметры пространственного положения ЛПС, как крен kbla, тангаж lbla и склонение ζbla;
низкая точность определения координат ИРИ в ряде случаев связана с несогласованностью габаритных размеров антенной системы с рабочим диапазоном частот (используются узкобазисные антенные системы (АС) с ограниченным числом антенных элементов (АЭ));
наложение ограничений на маршрут полета ЛПС.
Известен угломерно-дальномерный способ местоопределения (см. Baron A.R. et al. Passive Direction Finding and Signal Location. Microwave J., 1982, v.25, 9, р.59-76). Он включает прием ИРИ в заданной полосе частот ΔF перемещающемся в пространстве пеленгатором, измерение пространственно-информационных параметров обнаруженных сигналов: азимута θj и угла места βj с одновременным определением местоположения ЛПС {Blps, Llps, Hlps}j, где Вlps, Llps и Нlps соответственно широта, долгота и высота ЛПС, предварительное определение удаления ИРИ от ЛПС dj и координат ИРИ в момент времени ti

Аналог позволяет определять местоположения ИРИ из одной точки, однако точность выполняемых измерений является низкой в силу ряда обстоятельств. В способе не учитывается информация о пространственной ориентации ЛПС (углах крена klps, тангажа llps и склонения ζlps). Кроме того, ситуация усугубляется малыми габаритами БЛА, что влечет за собой рассогласование возможных размеров пеленгаторной антенны и используемого диапазона рабочих частот.
Наиболее близким по технической сущности к заявляемому способу является способ определения координат источников радиоизлучений (см. пат. РФ №2306579, МПК G01S 0/02, опубл. 20.09.2007 г., бюл. №26). Способ-прототип включает прием сигналов в заданной полосе частот ΔF перемещающимся в пространстве измерителем, измерение первичных координатно-информационных параметров обнаруженных сигналов, в качестве которых используется уровень оцениваемых сигналов, с одновременным измерением и запоминанием вторичных параметров: координат местоположения измерителя, многократное (М раз, М≥4) повторное измерение совокупности первичных и вторичных параметров в процессе перемещения измерителя по свободной траектории, последовательное вычисление М-1 отношений уровней сигналов, построение по вычисленным отношениям М-1 круговых линий положения и определение координат ИРИ в точках пересечения М-1 круговых линий положения.
Способ-прототип обеспечивает более высокую (по сравнению с аналогами) точность местоположения ИРИ с борта ЛПС, при этом для этой цели на основе измеренных приращений входной мощности сигнала формируется система нелинейных уравнений, описывающих круговые линии положения (окружности Апполония).
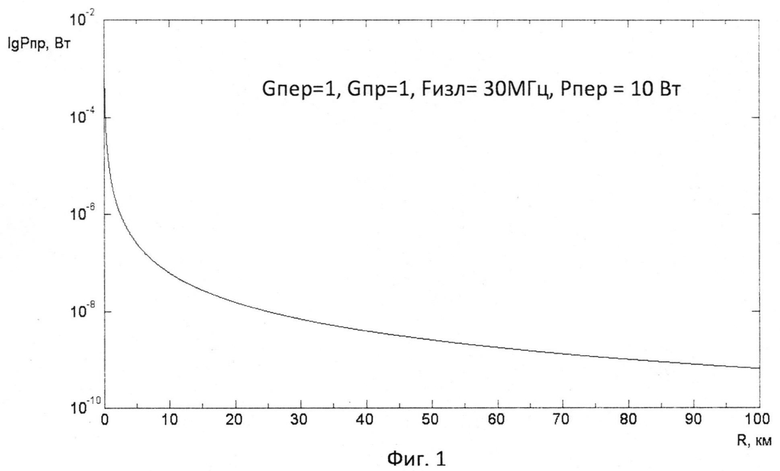
Однако способу-прототипу также присущ недостаток - его работоспособность сохраняется вблизи с оцениваемым ИРИ. Как показали практические испытания, в диапазоне 30-100 МГц прототип сохраняет свою работоспособность на удалении ЛПС от ИРИ до 8-15 км. На фиг.1 приведена зависимость мощности сигнала на входе измерителя от удаления передатчика. При этом мощность передатчика на частоте 30 МГц Рпер составляет 10 Вт, приемная и передающие штыревые антенны имеют коэффициент усиления Gпр=1 дБ и Gпер=1 дБ соответственно. Из его рассмотрения следует, что на значительных расстояниях (более 15 км от ИРИ) имеют место незначительные приращения мощности сигнала, что и обуславливает неработоспособность прототипа в этих условиях. В процессе барражирования ЛПС в заданном районе возможно его приближение к ИРИ на необходимое расстояние и определение его координат. При этом существенно возрастают необходимые временные затраты на выполняемые измерения. Последнее может привести к прекращению работы ИРИ и нерешению поставленной задачи.
В то же время известные угломерно-дальномерные способы определения координат ИРИ с летно-подъемных средств (см. пат. РФ №2419106, МПК G01S 13/46 опубл. 20.05.2011 г.) в схожей ситуации (при несогласованных габаритах пеленгаторной антенны с рабочим диапазоном частот) также будут обладать недопустимо низкой точностью измерений.
Целью заявляемого технического решения является разработка способа, обеспечивающего сокращения временных затрат на определение координат ИРИ в условиях, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы.
Поставленная цель достигается тем, что в известном способе определения координат источников радиоизлучений, включающем прием сигналов в заданной полосе частот AF перемещающимся в пространстве измерителем, измерение первичных координатно-информационных параметров обнаруженных сигналов, в качестве которых используется уровень оцениваемых сигналов, с одновременным измерением и запоминанием вторичных параметров: координат местоположения измерителя, многократное (М раз, М≥4) повторное измерение совокупности первичных и вторичных параметров в процессе перемещения измерителя, последовательное вычисление М-1 отношений уровней сигналов, построение по вычисленным отношениям М-1 круговых линий положения и определение координат ИРИ в точках пересечения М-1 круговых линий положения в каждой m-й точке измерений m=1, 2,…, М, дополнительно определяют пространственную ориентацию измерителя и первичные пространственно-информационные параметры оцениваемых сигналов, в качестве которых используют разность фаз сигнала в антенных элементах, грубо определяют направление θmj прихода оцениваемого сигнала относительно борта измерителя, после чего на каждой m-й точке измерений корректируют направление перемещения измерителя вплоть до определения координат ИРИ.
Благодаря новой сокупности признаков в заявляемом способе на основе поэтапной оптимизации направления перемещения измерителя достигается положительный эффект в виде сокращения временных затрат на определение координат ИРИ.
Известно устройство по пат. РФ №2263327, содержащее антенную решетку, антенный коммутатор, двухканальный приемник, двухканальный аналого-цифровой преобразователь, двухканальный преобразователь Фурье, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, умножитель, сумматор, блок определения азимута и угла места, три запоминающих устройства с соответствующими связями. Аналог обеспечивает измерение направления на источник радиоизлучения (углы θ и β) в сложной сигнально-помеховой обстановке. Однако устройству присущ недостаток. Его размещение на ЛПС в условиях наложения ограничений на габаритные размеры АС и количество АЭ приводит к необходимости работать в частотно несогласованном диапазоне волн. Например, при размещении измерителя на БЛА "Орлан 10" в диапазоне частот 30-100 МГц точность оценивания резко падает и составляет Δθ~15-20°.
Наиболее близким по своей технической сущности к заявляемому устройству определения координат ИРИ является устройство по пат. РФ №2419106, МПК G01S 13/46, опубл. 20.05.2011 г., бюл. №14. Оно сдержит антенную решетку, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенные умножитель, сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, первый вычислитель, предназначенный для определения предварительных координат ИРИ 



Устройство-прототип обеспечивает определение координат ИРИ угломерно-дальномерным способом с борта ЛПС. Высокая точность измерений достигается использованием фазового интерферометра совместно с учетом пространственной ориентации ЛПС в момент выполнения измерений. Однако прототипу присущ общий с известными аналогами недостаток: при наличии ограничений на габаритные размеры пеленгаторной антенны при работе в частотно несогласованном диапазоне волн точностные характеристики последнего резко падают.
Целью заявляемого технического решения является разработка устройства, обеспечивающего повышение точности определения координат ИРИ в условиях, когда налагаются ограничения на габаритные размеры пеленгаторной антенны.
Поставленная цель достигается тем, что в известном устройстве, состоящем из антенной решетки, выполненной из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенного коммутатора, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифрового преобразователя, выполненного двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блока преобразования Фурье, выполненного двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первого и второго запоминающих устройств, блока вычитания, блока формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блока вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, первая группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенных умножителя, первого сумматора, третьего запоминающего устройства, блока определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератора синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, первого сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, первого вычислителя, предназначенного для определения предварительных координат ПРИ 



Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи позволяет достичь цели изобретения: повысить точность местоопределения координат ИРИ в условиях наложения ограничений на габаритные размеры пеленгаторной АС за счет совместного использования первичных пространственно-информационных и координатно-информационных параметров сигналов.
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг.1 - зависимость уровня сигнала на входе измерителя от удаления источника радиоизлучения;
на фиг.2 - структурная схема устройства определения координат ИРИ;
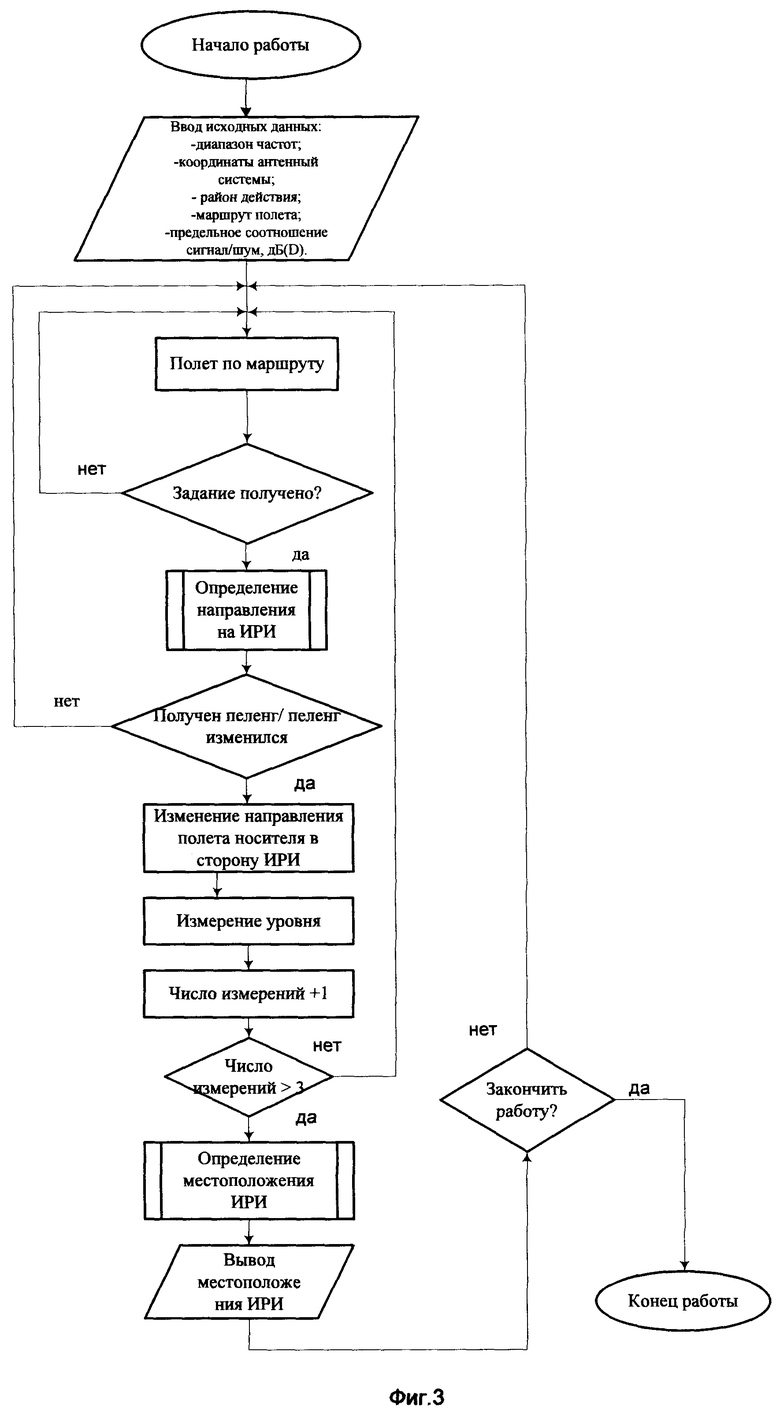
на фиг.3 - обобщенный алгоритм определения координат ИРИ;
на фиг.4 - обобщенный алгоритм определения направления на ИРИ θij;
на фиг.5 - порядок формирования окружностей Апполония;
на фиг.6 - структурная схема устройства определения координат ИРИ при размещении на беспилотном летательном аппарате.
Сущность предлагаемого способа состоит в следующем. В условиях названных выше габаритных ограничений, налагаемых на измеритель, задача определения координат ИРИ способом-прототипом может быть решена. Однако при этом предполагается наличие априорной информации о возможном районе его размещения. В противном случае потребуются значительные временные затраты на поиск этого района. Последнее может привести к окончанию работы источника и как следствия - к невыполнению поставленной задачи. Дополнительно введенные физические операции направлены на решение этой проблемы, что в конечном счете позволяет сократить временные затраты на определение координат ИРИ.
Реализация заявляемого способа поясняется следующим образом. На подготовительном этапе выполняют пространственное описание антенной системы пеленгатора (взаимное размещение АЭ), определяют ориентацию АС в трех плоскостях относительно борта ЛПС, принятых в авиации как крена kant, тангажа lant и курса αant (склонения kant) относительно корпуса ЛПС, определяют предельное соотношение сигнал/шум, задают исходные данные для устройства угловой ориентации ЛПС.
В процессе полета ЛПС по аналогии с пат. РФ №2419106 в заданной полосе частот ΔF осуществляют поиск и прием сигналов ИРИ, измерение их пространственных параметров θij и βij в системе координат антенной системы.
Одновременно в момент времени ti определяют местоположение ЛПС с помощью глобальной навигационной спутниковой системы (ГНСС) (Blps, Llps, Hlps)i. Ha основе полученных данных осуществляют предварительное определение удаления j-го ИРИ от ЛПС 
Далее в предлагаемом способе учитывают ориентацию АС пеленгатора относительно ЛПС и положение ЛПС в пространстве. Это достигается последовательным переходом из одной системы координат в другую, что удобнее и быстрее выполнять в декартовой системе координат.
В первом преобразовании учитывают априорно известную ориентацию АС относительно ЛПС (уточняют координаты ИРИ) на основе данных, полученных на подготовительном этапе. Коррекция 

где

На следующем этапе осуществляют перевод вектора уточненных координат 

Система координат, в которой на данном этапе находится вектор 

где


На завершающем этапе преобразуют истинные геоцентрические координаты 

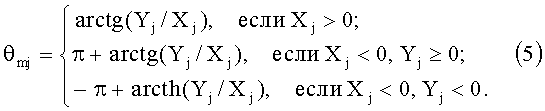
Перевод полученных со значительными погрешностями координат в сферическую систему координат позволяет получить искомый угол θmj направления на j-й объект в момент времени tm
На фиг.4 приведен обобщенный алгоритм определения направления на j-й ИРИ.
Одновременно с измеренным значением θmj определяют уровень j-го сигнала на входе измерителя. С этой целью для каждой пары АЭ вычисляют значения взаимных мощностей сигнала Рl,h(fv) по формуле

где l, h - номера антенных элементов АС.
Далее определяют суммарную мощность j-го сигнала P(fv)j на частоте v путем суммирования взаимных мощностей по всем парам АЭ. После этого определяют среднее значение мощности сигнала 

где η - количество используемых в обработке пар антенных элементов. На завершающем этапе выполняют операцию сравнения

В предлагаемом способе аналогично прототипу более высокая точность измерения координат ИРИ достигается с помощью определения приращений уровня сигнала при движении измерителя. Поэтому при получении результатов измерений

где λ - длина волны j-го ИРИ, Rm,j и Rm+1,j - расстояние от j-го ИРИ до измерителя, находящегося в точках m и m+1 соответственно. Тогда отношение расстояний до измерителя от точек измерения принимает вид
Известно (см. http://e-science.ru/math/theory/?t=269), что геометрическое место точек плоскости, отношение расстояний которых до двух данных точек - величина постоянная, и определяет окружность Апполония. Следовательно, источник излучения может находиться в любой точке окружности Апполония, проходящей в соответствии с (9). При движении измерителя по маршруту окружности, образованные приращением уровня радиосигнала, пересекаются в точке, являющейся оценкой местоположения ИРИ (см. фиг.5).
Радиус окружности Апполония определяется из выражения

а центр окружности находится в точке

Из выражений (9) - (11) можно получить уравнение, связывающее координаты j-го ИРИ с измеренными приращениями уровней сигнала

Две круговые линии положения имеют две точки пересечения. Для устранения неоднозначности определения координат ИРИ необходимо иметь минимум три круговые линии положения. Таким образом, решая минимально необходимую систему уравнений
из М-1 (М=4) уравнений вида (12), определяются искомые координаты (xj, yj).
В связи с тем, что измерение уровней сигнала проводится в разное время и в разных условиях, точность измерения будет различна. Поэтому дальнейший расчет (уточнение) координат целесообразно выполнять через математическое ожидание всех полученных координат точек пересечения
где 

При составлении уравнений (13) использованы только последовательные приращения уровней сигнала 

Данное обстоятельство позволяет повысить точность определения координат за счет использования дополнительных линий положения. Выражение для оценки координат в этом случае принимает вид

Устройство определение координат источников радиоизлучений содержит антенную решетку 5, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор 6, N входов которого подключены к соответствующим N выходам антенной решетки 5, а сигнальный и опорный выходы коммутатора 6 подключены соответственно к сигнальному и опорному входам двухканального приемника 7, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь 8, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника 7 соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя 8, блок преобразования Фурье 9, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя 8, первое 11 и второе 2 запоминающие устройства, блок вычитания 12, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП) 3, блок вычисления ППИП 10, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье 9, а второй информационный вход - с опорным выходом блока преобразования Фурье 9, первая группа информационных выходов блока вычисления ППИП 10 соединена с группой информационных входов первого запоминающего устройства 11, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания 10, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства 2, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП 3, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ 4, последовательно соединенные умножитель 13, первый сумматор 14, третье запоминающее устройство 15, блок определения азимута и угла места 16, причем первая и вторая группы информационных входов умножителя 13 объединены поразрядно и соединены с группой информационных выходов блока вычитания 12, генератор синхроимпульсов 1, выход которого соединен с управляющим входом антенного коммутатора 6, входами синхронизации аналого-цифрового преобразователя 8, блока преобразования Фурье 9, первого 11, второго 2 и третьего 15 запоминающих устройств, блока вычитания 12, умножителя 13, первого сумматора 14, блока определения азимута и угла места 16, блока формирования эталонных значений ППИП 3 и блока вычисления ППИП 10, первый вычислитель 17, предназначенный для определения предварительных координат
Для повышения точности определения координат ИРИ в условиях, когда налагаются ограничения на габаритные размеры пеленгаторной антенны дополнительно введены пятый вычислитель 21, предназначенный для преобразования географических координат
Устройство определения координат ИРИ работает следующим образом (см. фиг.2). Основными элементами его являются: фазовый интерферометр (блоки 1-21), предназначенный для грубого определения координат ИРИ, тракт измерения мощности сигнала (блоки 30-35)
Работа фазового интерферометра аналогична устройству-прототипу (см. пат. РФ №2419106). На подготовительном этапе выполняют следующие операции. Измеряют взаимные расстояния между антенными элементами Аl,h решетки 5 при их размещении на плоскости. Результаты измерений по шине 4 (см. фиг.2) поступают на вход блока формирования эталонных значений ППИП 3. Весь заданный диапазон частот ΔF делят на поддиапазоны, размеры которых Δf определяются минимальной шириной пропускания приемных трактов 7. Поддиапазоны, количество которых V=ΔF/Δf, нумеруют v=1, 2, …, V. Рассчитывают средние частоты всех поддиапазонов по формуле fv=Δf(2v-1)/2. Рассчитывают эталонные значения ППИП (блок 3) для средних частот всех поддиапазонов fv. В качестве ППИП используют значения разностей фаз сигналов Δφl,h(fv) для всех возможных парных комбинаций антенных элементов в рамках антенной решетки 5.
В процессе расчета эталонных ППИП в блоке 3 моделируют размещение эталонного источника поочередно вокруг АС измерителя с дискретностью Δθ и Δβ на удалении нескольких длин волн. В блоке 3 по известному алгоритму (см. пат. РФ №2283505, G01S 13/46, опубл. 24.05.2004 г., бюл. №30) вычисляют значение разностей фаз Δφl,h,эm(fv), которые в дальнейшем хранятся во втором запоминающем устройстве 2 (см. фиг.2).
В процессе работы устройства с помощью блоков 5-16 осуществляют поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF. Принимаемые решеткой 5 сигналы на частоте fv поступают на соответствующие входы антенного коммутатора 6. В задачу последнего входит обеспечение синхронного подключения в едином промежутке времени любых пар антенных элементов к опорному и сигнальному выходам. В результате последовательно во времени на оба сигнальных входа двухканального приемника 7 поступают сигналы со всех возможных пар антенных элементов (АЭ) решетки 5. При этом все антенные элементы периодически выступают как в качестве сигнальных, так и в качестве опорных (при условии использования полнодоступного коммутатора 6). Этим достигается максимальный набор статистики о пространственных параметрах электромагнитного поля.
Сигналы, поступившие на входы приемника 7, усиливают, фильтруют и переносят на промежуточную частоту, например 10,7 МГц. С опорного и сигнального выходов промежуточной частоты блока 7 сигналы поступают на соответствующие входы аналого-цифрового преобразователя (AЦП) 8, где синхронно преобразуют в цифровую форму. Полученные цифровые отсчеты сигналов антенных элементов Аl и Аh в блоке 8 перемножают на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые относительно друг друга на π/2. В результате в блоке 8 формируют четыре последовательности отсчетов (квадратурные составляющие отсчетов от двух АЭ Al и Аh). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 8 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала на соответствующие отсчеты временного окна. Порядок выполнения этих операций подробно рассмотрен в пат. РФ №2263328 и пат. РФ №2283505.
На завершающем этапе в блоке 8 формируют две комплексные последовательности отсчетов путем попарного объединения соответствующих отсчетов скорректированных последовательностей, которые поступают на входы блока преобразования Фурье 9.
В результате выполнения в блоке 9 операции в соответствии с выражением 

где l, h=1, 2,…, N, l≠h - номер АЭ. На его основе определяют Δφl,h(fv) как

Кроме того, определяют значение Рl,h(fv) в соответствии с выражением

Эти функции выполняются блоком вычисления ППИП 10. В предлагаемом устройстве измеренное значение Δφl,h(fv) очередным импульсом генератора 1 записывают в первое запоминающее устройство 11. Данная операция повторяется до тех пор, пока не будут записаны в блок 11 значения ППИП для всех возможных сочетаний пар АЭ. Выполнение этой операции соответствует формированию массива измеренных ППИП Δφl,h,изм(fv)
Основное назначение блоков 12, 13, 14, 15, 16 и 2, 3 состоит в том, чтобы оценить степень отличия измеренных параметров Δφl,h,изм(fv) от эталонных значений Δφl,h,эm(fv), рассчитанных для всех направлений прихода сигнала Δθk и Δβc и всех fv,

По аналогии с прототипом данная операция осуществляется следующим образом. Эталонные значения Δφl,h,эm(fv), хранящиеся в запоминающем устройстве 2, поступают на вход уменьшаемого блока вычитания 12. На вход вычитаемого блока 12 поступают измеренные значения Δφl,h,изм(fv) с выхода блока 11. Операция вычитания осуществляется в строгом соответствии с порядком формирования пар АЭ.
На следующем этапе полученные разности возводят в квадрат в блоке 13. Данная операция необходима для того, чтобы все результаты операции вычитания имели положительное значение. В противном случае могла возникнуть бы ситуация, когда сумма положительных и отрицательных разностей компенсировали друг друга. Для возведения в квадрат каждый результат вычислений умножают на себя в блоке 19. Полученные квадраты разностей складывают в сумматоре 14 и записывают в третье запоминающее устройство 15. В результате в блоке 15 формируют массив данных Hθ,β(fv), на основе которого получают пространственные параметры θi и βi в системе координат АС. Эта операция осуществляется блоком 16 путем поиска минимальной суммы min Hθ,β(fv) в массиве данных Hθ,β(fv). Очередным импульсом синхронизации генератора 1 значения θi и βi из блока 16 по соответствующим выходам поступает на первую и вторую группы информационных входов первого вычислителя 17. После этого содержимое первого 11 и третьего 15 запоминающих устройств обнуляют и начинают новый цикл измерения пространственных параметров θi+1 и βi+1.
В функции первого вычислителя входит предварительное определение удаления ИРИ от ЛПС di и координат ИРИ 
Результаты предварительного определения координат ИРИ 

Значение уточненных координат 

В связи с тем, что использование геоцентрических координат на практике затруднено, четвертым вычислителем 20 осуществляют преобразование истинных геоцентрических координат ИРИ
На завершающем этапе с помощью пятого вычислителя 21 преобразуют географические координаты j-го ИРИ в его пространственный параметр (пеленг) θmj, необходимый для коррекции направления полета ЛПС. Данная операция блоком 21 выполняется в соответствии с выражением (5).
Одновременно с измерением θmj оценивают приращение мощности сигнала на входе измерителя ΔP(fv)m,m+1,j. Для выполнения этой операции задействованы блоки 30-35 и 41. Измеренное блоком 10 значение взаимной мощности сигнала Рl,h(fv) поступает на группу информационных входов пятого запоминающего устройства 31. В функции блоков 31 и 32 входит вычисление суммарной мощности P(fv) путем суммирования взаимных мощностей Pl,h(fv) по всем парам АЭ. В блоке 32 осуществляется последовательное суммирование поступающих на его вход значений Рl,h(fv) с выхода блока 31. Продвижение информации с выхода блока 31 на вход блока 32 осуществляется импульсами генератора 1. После поступления η таких импульсов (что соответствует количеству используемых в обработке пар АЭ) на выходе блока 32 формируется значение суммарной мощности P(fv) для данного поддиапазона Δfv. Последнее поступает на группу информационных входов делителя 33. Передним фронтом управляющего импульса, сформированным на выходе обнуления счетчика импульсов 30, в блоке 33 выполняется операция деления на η (выражение 7), что соответствует вычислению средней мощности сигнала 


На этапе точного измерения координат ИРИ задействованы блоки 38-41. Значения 
Использование в качестве транспортного средства БЛА, например "Орлан-10" (см. фиг.6), влечет за собой двухпозиционное размещение элементов устройства:
воздушная компонента на борту БЛА включает блоки 1; 5-10; 24; 25;
наземная компонента включает блоки 2; 3; 11-24; 30-41. При этом указанные межблочные связи сохраняются.
На борту БЛА выполняют измерение первичных пространственных и координатно-информационных параметров Δφl,h(fv) и Pl,h(fv) соответственно (блоки 1; 5-10). Кроме того, определяется местоположение БЛА и его пространственная ориентация (блоки 25 и 26), частота настройки приемника 7. Названная информация передается на наземный пункт управления с помощью дополнительно введенных первого радиомодема 43 и радиопередатчика 44 по высокоскоростному симплексному каналу связи на частотах 2-2,5 ГГц. Скорость передачи информации составляет 4 Мбит/с, а дальность связи зависит от высоты полета и местных условий и в среднем составляет 100-130 км (см. hhtp://bla-orlan.ru/default/catalog/orlan 10.html).
Наземный пункт управления (наземная компонента) как правило состоит из двух автоматизированных рабочих мест (АРМ):
обработки первичной информации и определения координат ИРИ;
обработки командно-телеметрической информации и управления БЛА.
Первое автоматизированное рабочее место обработки первичной информации и определения координат содержит блоки 2; 3; 11-21; 24; 30-41, а также дополнительно введенные радиоприемное устройство 45 и второй радиомодем 46. В рамках этого АРМ определяются координаты ИРИ (B, L)j, а также направление на него θmj. Синхронизацию работы блоков 2; 3; 11-21; 24; 30-41 обеспечивает дополнительный генератор синхроимпульсов 52.
Управление БЛА "Орлан-10" реализуют с помощью второго АРМ обработки командно-телеметрической информации и управления БЛА по низкоскоростному дуплексному каналу связи на частотах 900-920 МГц в режиме псевдослучайной перестройки рабочей частоты (блоки 47-50). По этому каналу осуществляют задание маршрута полета, порядок облета: проход на высоте или барражирование и т.д. Исходная информация (местоположения БЛА и его пространственная ориентация) на второй АРМ поступает по низкоскоростному дуплексному каналу связи, а направление на j-й ИРИ θmj с первого АРМ. В соответствии с поступившими исходными данными оператор второго АРМ корректирует направление полета БЛА с помощью блока 51.
В устройстве, реализующем предложенный способ, используют известные элементы и блоки, описанные в научно-технической литературе. Блоки с 1 по 20, 24-26 реализуют аналогично соответствующим блокам устройства-прототипа. Варианты реализации антенных элементов и антенной решетки 5 широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь. 1997; Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p.). Тип используемых АЭ определяется местом размещения антенной решетки 5. Под фюзеляжем в АС, как правило, используются ненаправленные АЭ. При размещении антенной решетки 5 в других местах используют направленные АЭ. В качестве последних могут быть использованы широкополосные трехдиапазонные рупорно-микрополосковые антенны (см. пат. РФ №2360338, см. пат. РФ №2345453). Антенные коммутаторы 6 широко известны (см. Вениаминов В.Н. и др. Микросхемы и их применение. - М.: Радио и связь, 1989. - 240 с.; Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987. - 120 с.). Двухканальный приемник 7 может быть реализован с помощью двух профессиональных приемников типа IC-RS500 фирмы ICOM (см. Communication Receiver IC-R8500. Instruction Manual). При этом первый и второй гетеродины одного из приемников используют одновременно в качестве первого и второго гетеродинов соответственно второго приемника. Кроме того, в качестве приемника 7 могут попарно использоваться и другие приемники фирмы ICOM: IC-R7000, IC-PCR1000.
Двухканальный АЦП 8 и блок преобразования Фурье 9, а также блок вычисления ППИП 10, первое запоминающее устройство 11 могут быть реализованы с помощью стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Shark ADSP-21062 (см. руководство пользователя e-mail: insys@arc.ru www-сервер www.insys.ru).
Построение генератора синхроимпульсов 1 известно и широко освещено в литературе (см. Радиоприемные устройства: учебное пособие для радиотехн. Спец. ВУЗов / Ю.Т.Давыдов и др. М.: Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсатор помех: Часть II. В.В.Никитченко. - Л.: ВАС. - 1990. - 176 с.).
С помощью блоков 12, 13 и 14 реализуют выражение (18) описания. Варианты выполнения первого сумматора 14, блока вычитания 12 приведены, например, в (Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Второе 2 и третье 15 запоминающие устройства реализуют по известным схемам (см. Большие интегральные схемы запоминающих устройств: Справочник/ А.Ю.Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.).
Умножитель 13 реализует операцию возведение в квадрат (выражение 18), а его выполнение освещено в (Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.)
Блок формирования эталонных ППИП предназначен для создания таблиц эталонных значений разностей фаз Δφl,h,эm(fv) для различных пар АЭ решетки 5 и различных поддиапазонов v. На подготовительном этапе по входной установочной шине 4 задают следующие исходные данные:
сектор обработки по азимуту (θmin, θmax) и углу места (βmin, βmax);
точность нахождения углового параметров Δθ и Δβ;
удаление эталонного источника D;
топология размещения АЭ {rn},где rn={Xn, Yn, Zn};
Задача блока 3 состоит в том, чтобы для данного подвижного пеленгатора, каждого частотного поддиапазона ΔF для заданной топологии антенной решетки 5 с дискретностью по азимуту Δθ и углу места Δβ рассчитать идеальные (эталонные) значения разностей фаз Δφl,h,эm(fv) для всех пар антенных элементов с учетом того, что эталонный источник перемещается на удаление D от решетки. Блок 3 может быть реализован в виде автомата, микропроцессора (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.). В качестве последнего целесообразно использовать 16-разрядный микропроцессор К1810ВМ86.
Реализация блока определения азимута и угла места 16 известна и широко освещена в литературе. Предназначен для поиска минимальной суммы Нθ,β(fv) и может быть реализован по пирамидальной схеме с использованием быстродействующих компараторов (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.).
Реализация четвертого запоминающего устройства 24 трудностей не вызывает. Блок 24 представляет собой буферное запоминающее устройство и может быть реализован аналогично блоку 2.
Радионавигатор 25 предназначен для измерения путевого угла µlps, широты Вlps, долготы Llps и высоты Нlps нахождения ЛПС в момент времени tm (момент измерения параметров угловой ориентации ЛПС и местоположения ИРИ). Данная функция может быть реализована с помощью навигатора GPS (см. Garmin. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя www.jj.connect.ru).
Первый 17, второй 18, третий 19 и четвертый 20 вычислители предназначены для предварительного определения координат ИРИ (блок 17) и последующего уточнения этого значения благодаря учету ориентации АС измерителя относительно борта ЛПС и собственно угловой ориентации ЛПС в пространстве. Каждый из вычислителей выполняет строго определенные в выражениях 1-4 операции, реализация которых сложностей не вызывает. Для повышения быстродействия названные блоки могут быть реализованы на программируемых постоянных запоминающих устройствах, например серии К541 и К500. Для уменьшения массогабаритных характеристик, потребляемого тока блоки 17, 18, 19 и 20 целесообразно реализовать на специализированном микропроцессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html), алгоритм работы которого приведен на фиг.4. Одновременно на микропроцессоре TMS320c6416 могут быть реализованы блоки 12-16.
Устройство угловой ориентации ЛПС 26 предназначено для измерения пространственных параметров ЛПС: крена klps, тангажа llps и склонения ζlps Реализация блока известна (см. пат. РФ №2371733, пат. РФ №2374659).
Пятый вычислитель 21 предназначен для преобразования географических координат j-го ИРИ в направление на него θmj в соответствии с выражением (5). Для уменьшения массогабаритных характеристик, потребляемого тока блок 21 целесообразно реализовать совместно с блоками 17-20 на специализированном микропроцессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html).
Счетчик импульсов 30, пятое запоминающее устройство 31, второй сумматор 32, делитель 33, блок сравнения 34 и шестое запоминающее устройство 35 предназначены для измерения мощности сигнала
Шестой 39, седьмой 40 и восьмой 41 вычислители предназначены для преобразования измеренных мощностей сигнала
Вычислитель 41 предназначен для накопления М измерений значений
Седьмой вычислитель 40 предназначен для преобразования найденных приращений уровней сигналов на входе измерителя в окружности Апполония в соответствии с выражением (10), центры которых определяются из (11).
Шестой вычислитель 39 предназначен для нахождения координат точек пересечения окружностей Апполония (координат ИРИ) в соответствии с выражением (13).
Блок статистической обработки 38 предназначен для повышения точности определения координат ИРИ. Последние определяются через математическое ожидание всех полученных координат точек пересечения в соответствии с (14).
Блок управления 36 предназначен для формирования сигнала, разрешающего запись значения мощности
Однако этот сигнал формируется не чаще, чем через заданный интервал времени Δt. Представляет из себя совокупность таймера и блока сравнения, реализация которых трудностей не вызывает.
Для уменьшения массогабаритных характеристик, потребляемого тока блоки 30-41 целесообразно реализовать на втором специализированном микропроцессоре TMS320c64J6.
При реализации заявляемого устройства на БЛА "Орлан 10" измеритель первичных параметров (бортовая часть) выполнен трехканальным. Радиоприемники IС-8500 из-за массогабаритных характеристик заменены на трехканальный приемник фирмы ООО "Специальный Технологический Центр" г.Санкт-Петербург (см. stc-spb.ru). В связи с тем, что на БЛА используется трехэлементная АС 5, необходимость в антенном коммутаторе 6 отпала. Блоки 7, 8 и 9 также выполнены трехканальными.
Кроме того, блоки 2; 3; 11-21; 24; 30-41 из состава первого АРМ могут быть реализованы на персональном компьютере (ноутбуке). В качестве минимальных требований к нему можно определить следующее: процессор Core i5 2000 МГц, 1 ГБ оперативной памяти, 200 МБ свободного пространства на жестком диске. Программная составляющая: операционная система Windows ХР SP1 и выше, библиотека. NetFrameWork 4.0.
Выполнены практические испытания предлагаемого способа и устройства определения координат в диапазоне 30-3000 МГц на базе БЛА "Орлан-10". Диапазон перекрывался пятью сменными литерами:
1. 30-100 МГц. Расстояние между АЭ 1,5-3 метра.
2. 100-200 МГц. Расстояние между АЭ 0,8 метра.
3. 200-400 МГц. Расстояние между АЭ 0,5 метра.
4. 400-700 МГц. Расстояние между АЭ 0,25 метра.
5. 700-3000 МГц. Расстояние между АЭ 0,14 метра.
Точность местоопределения ИРИ оценивалась на расстоянии 5-10 км при высоте полета от 400 до 1000 метров. Во всех пяти литерах измерители первичных параметров (воздушная компонента на борту БЛА) выполнены трехканальными. В результате испытаний получены следующие результаты:
Приведенные в таблице данные свидетельствуют о том, что при использовании предлагаемых способа и устройства обеспечивается точность определения координат ИРИ с погрешностью меньшей 10% от дальности. С другой стороны достигается резкое сокращение временных затрат на выполняемые измерения благодаря оптимизации маршрута полета БЛА (ЛПС).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |

Заявляемые изобретения могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения источников радиоизлучений (ИРИ) с летно-подъемного средства (ЛПС), в частности беспилотного летательного аппарата (БЛА). Достигаемый технический результат - сокращение временных затрат на определение координат ИРИ в условиях, когда налагаются ограничения на габаритные размеры пеленгаторной антенны. Технический результат достигается благодаря предварительному периодическому определению направления на ИРИ с помощью угломерно-дальномерного способа местоопределения для корректирования маршрута полета ЛПС с последующим использованием дальномерного способа местоопределения для высокоточного определения координат ИРИ на основе использования окружностей Апполония. Устройство определения координат ИРИ содержит двухканальный фазовый интерферометр, восемь вычислителей, три запоминающих устройства, радионавигатор, устройство угловой ориентации ЛПС, счетчик импульсов, делитель, блок управления, пороговое устройство, блок статической обработки, шесть входных установочных шин, две выходные шины, определенным образом соединенные между собой. 2 н.п. ф-лы, 6 ил., 1 табл.
1. Способ определения координат источников радиоизлучений (ИРИ), включающий прием сигналов в заданной полосе частот ΔF перемещающимся в пространстве измерителем, измерение первичных координатно-информационных параметров обнаруженных сигналов, в качестве которых используется уровень оцениваемых сигналов, с одновременным измерением и запоминанием вторичных параметров: координат местоположения измерителя, многократное (М раз, М≥4) повторное измерение совокупности первичных и вторичных параметров в процессе перемещения измерителя, последовательное вычисление М-1 отношений уровней сигналов, построение по вычисленным отношениям М-1 круговых линий положения и определение координат ИРИ в точках пересечения М-1 круговых линий положения, отличающийся тем, что в каждой m-й точке измерений m=1, 2, …, М, дополнительно определяют пространственную ориентацию измерителя и первичные пространственно-информационные параметры оцениваемых сигналов, в качестве которых используют разность фаз сигнала в антенных элементах, грубо определяют направление θmj прихода оцениваемого сигнала относительно борта измерителя, после чего на каждой m-й точке измерений корректируют направление перемещения измерителя вплоть до определения координат ИРИ.
2. Устройство определения координат источников радиоизлучений (ИРИ), содержащее антенную решетку, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, первая группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенные умножитель, первый сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, первого сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, первый вычислитель, предназначенный для определения предварительных координат ИРИ
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2453997C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2334244C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| US 6791493 B1, 14.09.2004 | |||
| US 7952521 B2, 31.05.2011 | |||
| WO 2005045459 A3, 07.07.2005 | |||
| US 5625364 A, 29.04.1997. | |||

