Изобретение относится к авиационной технике, в частности к способам и системам, обеспечивающим аварийное покидание экипажем летательного аппарата.
Известны спасательные парашюты, снабженные устройством для снижения скорости приземления (патент США №6224019 В1 от 01 мая 2001). Однако описанные устройства снижения скорости приземления (УССП) имеют недостатки и не могут быть использованы для спасательных парашютов катапультных кресел.
Известно техническое решение "Устройство для смягчения удара при соприкосновении с землей" (патент РФ 2275313, класс МПК B64D 1/14).Устройство для обеспечения скорости приземления не более 6 м/с летчика массой до 111 кг при приземлении летчика на площадки, расположенные на высотах до 4 км, содержит устройство снижения скорости приземления, закрепленное на свободных концах строп, которыми парашют крепится к подвесной системе. По физиологическим ограничениям эта перегрузка не должна превышать 16 единиц.
Недостатки: Применение возможно при приземлении на площадки, расположенные на высотах до 4 км; рабочий отрезок вертикали эффективен в пределах 0-1 м и в малом временном разбросе; к массе штатной парашютной системы добавляется дополнительная масса; перегрузка может достигать 16 единиц, что может отрицательно отразиться на позвоночнике парашютиста.
Известен также способ снижения скорости специальных парашютно-реактивных систем для десантирования с транспортных самолетов грузов и различной техники, использующий пороховой двигатель. («Техника и вооружение: вчера, сегодня, завтра». Научно-популярный журнал. Март 2011 г.). Включение порохового двигателя в этом случае осуществляется на определенной высоте специальными щупами при контакте с поверхностью земли.
Недостаток: пороховой двигатель подбирается для каждого случая спускаемой массы груза.
Известен способ и система снижения вертикальной скорости приземления летчика после катапультирования, заключающийся в применении порохового двигателя и датчика, включающего двигатель в зависимости от текущей высоты, причем информацию о предварительно измеренной массе летчика в снаряжении сначала закладывают в блок автоматики кресла, а при катапультировании передают датчику, который измеряет текущую высоту и вертикальную скорость снижения и в зависимости от массы летчика, высоты и скорости снижения электрической командой включает пороховой двигатель, (патент РФ 2544076, МПК: B64D 17/34 0.03.2015 г.). Выбран в качестве прототипа.
Недостатки технического решения, выбранного в качестве прототипа, следующие: надо заранее заложить информацию об измеренной массе летчика в снаряжении в блок автоматики кресла; способ снижения вертикальной скорости приземления и система для его реализации в данном исполнении годится только для пилота летательного аппарата с катапультным креслом и не распространяется на применение парашютистами иных служб.
Задачей, на решение которой направлено заявленное изобретение с возможностью применения на спасательных парашютных системах катапультных кресел и парашютных системах иных применений, является создание способа и системы, обеспечивающих приземление парашютиста с минимальной скоростью, исключающей травматизм при приземлении, и возможность применения для десантирования с больших высот с максимальной вертикальной скоростью и десантирования с минимально малых высот.
Поскольку способ и система для уменьшения скорости приземления парашютиста должны работать в диапазоне малых высот: 15-20 метров текущей высоты, то фиксировать такие высоты надо буквально с сантиметровой точностью. Для этой цели больше всего подходит не высотомер, который определяет высоту косвенно-с помощью анероида по разности атмосферного давления и допуск на точность составляет метры, а лазерные дальномеры, в которых допуск на точность составляет сантиметры.
Предлагаемое изобретение расширяет арсенал средств такого же назначения.
В «Способе …», содержащем пороховой двигатель, датчик, которым принимают информацию о текущей высоте, о вертикальной скорости, от тензометрического измерителя веса парашютиста в снаряжении, обрабатывают ее в электрический сигнал и электрической командой включают пороховой двигатель, применен основной парашют с площадью под скорость снижения не менее 20 м/с (в 4 раза превышает скорость вертикального спуска парашютиста на спасательном парашюте сегодняшнего дня), пороховой двигатель (далее реактивный двигатель твердого топлива-РДТТ) с двумя рабочими соплами, который соединен быстроразъемным узлом с основным парашютом и шарнирным соединением с буксировочной стренгой (введена вновь); буксировочная стренга соединена пиромеханическим разъемом с парашютной подвесной системой; трос в гибкой оболочке закреплен на парашютной подвесной системе, один конец троса соединен с пиромеханическим разъемом, другой конец связан с вытяжным кольцом; на буксировочной стренге закреплен тензометрический измеритель веса парашютиста в снаряжении при установившейся скорости снижения; в донной части РДТТ размещен элемент электропитания. Технические требования к экипировке: костюм парашютиста, перчатки, обувь, шлем с забралом должны выдерживать кратковременное (1,5-2,0 сек) касание пограничного слоя газового потока от РДТТ.
Технические требования по безопасности к экипировке парашютиста заимствованы из документа «Технический регламент на экипировку пилота спортивного болида «Формула-1»: Экипировка пилота «Формулы-1» должна выдерживать температуру порядка 800°С в течение 12 секунд. Источник: http://fishki.net/1312247-bezapastnost-pilota-v-f-1.html©Fishki.net.
Такое конструктивное решение способа и системы для уменьшения скорости приземления парашютиста позволяет реализовать способ катапультирования из самолета как при разбеге и пробеге на земле, так и в воздухе на любой высоте, а также десантирование парашютистов со сверхмалых высот (с текущей высоты в 30-40 метров) и больших высот порядка 10000 метров, проходя опасные высоты, прицельно простреливаемые из стрелкового оружия, с большой вертикальной скоростью и обеспечивая приземление с вертикальной травмобезопасной скоростью 5-3 м/с и ниже.
Граничными условиями выбора тяговооруженности РДТТ являются травмобезопасное приземление парашютиста после катапультирования при разбеге и пробеге самолета на Нотн=0 м,  и травмобезопасное приземление на высоте НОТН=4000 м,
и травмобезопасное приземление на высоте НОТН=4000 м,  после катапультирования. Травмобезопасной вертикальной скоростью приземления парашютиста считается скорость 5 м/с без боковой составляющей от ветра. Высоту НОТН=5000 м для приземления парашютиста не рассматриваем, как не востребованную.
после катапультирования. Травмобезопасной вертикальной скоростью приземления парашютиста считается скорость 5 м/с без боковой составляющей от ветра. Высоту НОТН=5000 м для приземления парашютиста не рассматриваем, как не востребованную.
В качестве основного парашюта выбран парашют с конусным куполом с коэффициентом сопротивления Сп=0,3. Ценным качеством конусного купола является то, что он обеспечивает устойчивое (без вращения и раскачивания) снижение груза (в данном случае парашютиста). Площадь поверхности купола парашюта FП (площадь раскроя ткани купола) выбрана под значение установившейся скорости снижения 20 м/сек на отметке текущей высоты 20 м в эшелоне высоты Нотн=0 м после катапультирования при разбеге или пробеге самолета со скоростью 130 км/час и рассчитана по формуле:  (стр. 118, 121; С.М. Алексеев и др. Современные средства аварийного покидания самолета. Оборонгиз 1961 г.).
(стр. 118, 121; С.М. Алексеев и др. Современные средства аварийного покидания самолета. Оборонгиз 1961 г.).
Наихудшим расчетным случаем выбора тяговооруженности и времени работы порохового двигателя является катапультирование парашютиста с приземлением на высоте 4000 м;  ), вес G=140 кг под парашютом; с парашютом вес 146 кг. Скорость установившегося вертикального снижения:
), вес G=140 кг под парашютом; с парашютом вес 146 кг. Скорость установившегося вертикального снижения:
 ; с такой установившейся скоростью парашютист снижается в эшелоне относительной высоты НОТН=4000 м до точки включения РДТТ в работу на текущей высоте 20 м. При включении РДТТ отбрасывается парашют и вес груза в 140 кг принимает на себя РДТТ. 140 кг=135 кг (вес пилота в снаряжении) + 5 кг(вес РДТТ).
; с такой установившейся скоростью парашютист снижается в эшелоне относительной высоты НОТН=4000 м до точки включения РДТТ в работу на текущей высоте 20 м. При включении РДТТ отбрасывается парашют и вес груза в 140 кг принимает на себя РДТТ. 140 кг=135 кг (вес пилота в снаряжении) + 5 кг(вес РДТТ).
Итак G=140 кг; V0=24,454 м/с; задаем h=20 м текущей высоты - точка включения РДТТ; Vt - скорость приземления (касание земли) примем 5 м/с (травмобезопасная общепринятая сейчас); далее расчет по формулам равномерно замедленного движения:
 а=(24,4542-52):2*20=14,325 м/с2; Время работы РДТТ
а=(24,4542-52):2*20=14,325 м/с2; Время работы РДТТ
t=(VO-Vt):а=(24,47-5):14,325=1,358 с;
Р - тяга РДТТ; Р=m*a+Fa (ра-рн); двигатель на высоте Нотн=4000 м работает в расчетном режиме, при котором давление на срезе сопла равно давлению окружающей среды и слагаемое Fa(ра-рн) обнуляется, поэтому Р=m*а; 
 это вертикальная составляющая тяги РДТТ. Каждое сопло развернуто на 40°; действительная тяга составляет P=204.432:cos40°=266,87 кгс; на каждое сопло приходится 134 кгс тяги;
это вертикальная составляющая тяги РДТТ. Каждое сопло развернуто на 40°; действительная тяга составляет P=204.432:cos40°=266,87 кгс; на каждое сопло приходится 134 кгс тяги;
Скорости установившегося вертикального снижения по высотам (VCH), скорости приземления (Vt), расчетный размер текущей высоты h=20 м, реальные размеры h, рассчитанные по формулам равномерно замедленного движения, приведены ниже:
VCH по Н  Vt скор. приземления = VCH - a*t;
Vt скор. приземления = VCH - a*t;

Расчет энергетический выполнен по книгам: Белов В.П. «Расчет параметров и характеристик ракетных двигателей», «Конструкция и проектирование ракетных двигателей» В.А. Володин, Ю.Н. Ткаченко Машиностроение 1984 г.
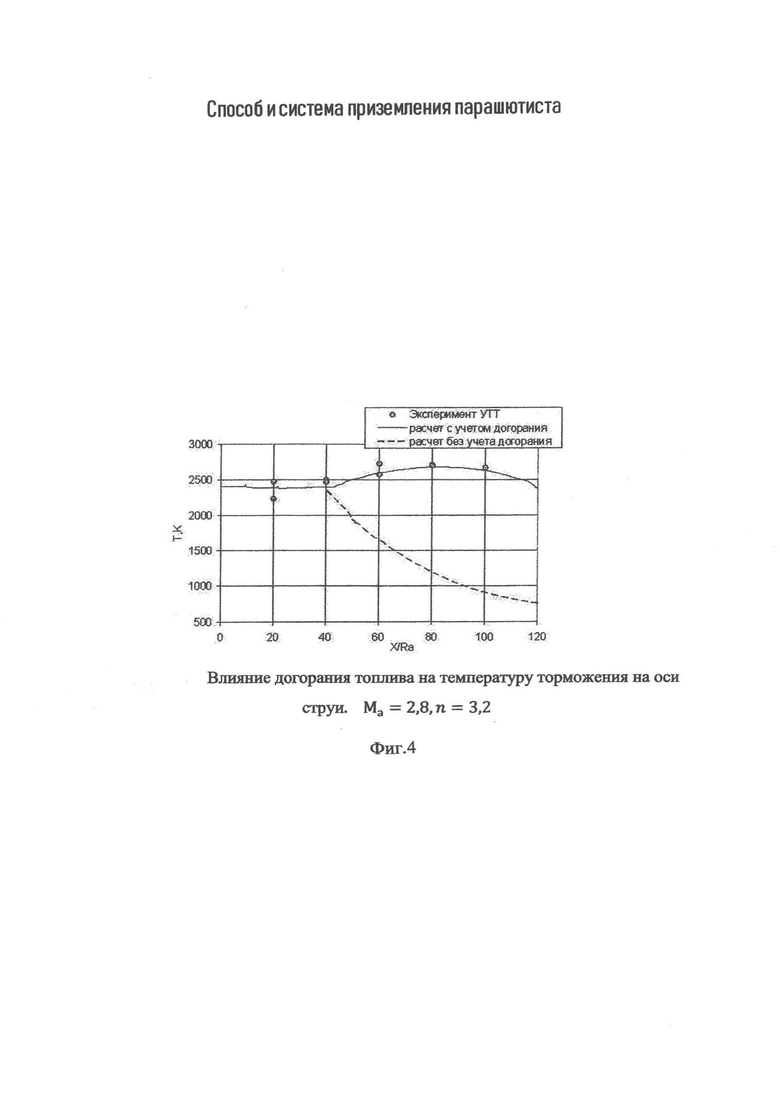
Факультетом аэрокосмической техники Пермского национального исследовательского политехнического университета проведены огневые стендовые испытания по теме «Методика определения энергетических характеристик РДТТ», представлены материалы эксперимента УТТ и расчеты с учетом догорания топлива. Эксперимент показывает (фиг. 4 Влияние догорания топлива на температуру торможения на оси струи), что в начальный период движения догорание увеличивает температуру на 10% относительно температуры на оси струи. Таким образом на начальном участке (20-50 радиусов Ra) температура может возрасти до 690К+70К=760К.
В книге Ю.И. Димитриенко «Численное моделирование газодинамики факела РДТТ» приведены фотографии распределения плотности  газа (фиг. 5); в автореферате Сафонова А.В. «Методы расчета термо-газодинамики сверхзвуковых турбулентных затопленных струй» (фиг. 6) представлена схема турбулентного струйного течения, где показана толщина слоя смешения. Распределения не выходят за пределы телесного угла в 40 градусов. С учетом радиационного теплового излучения в 15-25%, за пределами телесного угла температура не должна превышать 760К ×1.25=950К, что равно 680°С.
газа (фиг. 5); в автореферате Сафонова А.В. «Методы расчета термо-газодинамики сверхзвуковых турбулентных затопленных струй» (фиг. 6) представлена схема турбулентного струйного течения, где показана толщина слоя смешения. Распределения не выходят за пределы телесного угла в 40 градусов. С учетом радиационного теплового излучения в 15-25%, за пределами телесного угла температура не должна превышать 760К ×1.25=950К, что равно 680°С.
Для компенсации технологической разности допусков на размеры и по обрезу сопел, что может отразиться на устойчивости корпуса РДТТ в вертикальной оси, целесообразно развернуть сопла таким образом, чтобы при работе они закручивали корпус РДТТ относительно вертикали.
Предлагаемое техническое решение поясняется ниже описанием способа и системы приземления парашютиста после покидания летательного аппарата со ссылками на прилагаемые рисунки, на которых изображено:
фиг. 1 - вид «Способа …» при функционировании;
фиг. 2 - вид порохового двигателя;
фиг. 3 - вид пиромеханического разъема;
фиг. 4 - Влияние догорания топлива на температуру торможения на оси струи.
фиг. 5 - Распределение плотности ρ газа, кг/м3;
фиг. 6 - Схема течения. Разностная сетка;
«Способ и система приземления парашютиста …» содержит парашютную подвесную систему 1, РДТТ 2 с двумя рабочими соплами, датчик 3, совмещающий в себе дальномер 4, вариометр 5, парашют 6 с площадью под скорость снижения не менее 20 м/с в эшелоне относительной высоты с массовой плотностью ρ=0,125 кг*c2/м4, быстроразъемное соединение 7, шарнирное соединение 8 с буксировочной стренгой 9; пиромеханический разъемом 10; тензометрический измеритель 11 веса парашютиста в снаряжении, трос 12 в гибкой оболочке 13, элемент электропитания 14, электропровод 15.
Функционируют «Способ и система …» следующим образом.
В каком-то эшелоне относительной высоты полета парашютист покидает летательный аппарат. Текущая высота включения РДТТ в расчете энерговооруженности РДТТ принята в 20 метров. Парашютист к этой высоте опускается уже с установившейся скоростью, которая отслеживается электронным вариометром и в виде электрического сигнала передается в датчик; туда же передается от тензометрического измерителя веса парашютиста в снаряжении, закрепленного на буксировочной стренге, информация о весе парашютиста в снаряжении; при достижении текущей высоты 20 метров, электросигнал от лазерного дальномера передается в датчик. В датчике информация от лазерного дальномера, тензометрического измерителя веса парашютиста и от электронного вариометра преобразуется, например, в величину суммарного сопротивления электрического тока, которая и определяет момент включения датчиком электрокомандой РДТТ в работу. Если реальная скорость снижения, замеренная вариометром с учетом массовой плотности воздуха в данном эшелоне высоты, и вес парашютиста соответствуют расчетной вертикальной скорости снижения на этой текущей высоте, тогда датчик выдает электрокоманду на включение РДТТ в работу; если не соответствуют (например, выданный тензометрическим датчиком вес парашютиста со снаряжением оказался несколько меньше или плотность воздуха оказалась больше), то датчик задержится с выдачей команды на включение РДТТ в работу и вертикальное снижение с установившейся скоростью продлится на несколько метров. Чем меньше будет вес парашютиста, чем ниже будет эшелон относительной высоты, в котором катапультируется пилот, тем ниже он опустится в зафиксированной дальномером текущей высоте 20 м прежде чем поступит электрическая команда от датчика на включение РДТТ в работу. Как только РДТТ вступает в работу, давление в его рабочей камере практически мгновенно возрастает до рабочего (70-71 кг/см2), газ давит на плунжер цанги, парашют отсоединяется от РДТТ и уходит в сторону, а РДТТ принимает на себя вес парашютиста и опускает его на землю с вертикальной скоростью 5-3 м/с или менее. При работе РДТТ приобретает вращательное движение вокруг вертикальной оси, сохраняя этим вертикальное положение.
Как только парашютист обопрется ногами о землю, снимается растягивающая нагрузка от веса парашютиста с тензометрического измерителя; тензометрический измеритель веса парашютиста выдает об этом информацию в датчик, тот выдает электрическую команду на пиромеханический разъем подвесной системы и стренги, РДТТ на остатках топлива уходит вместе с буксировочной стренгой по восходящей траектории в сторону.
Способ парашютирования пилота, заброшенного катапультой кресла на высоту 45 м при разбеге или пробеге на V=130 км/час на НОТН=0 м.
Данная система с парашютом площадью 19,47 м2 и пороховым двигателем РДТТ с тягой 268 кгс (вертикальная составляющая тяги 204,432 кгс, время работы 1,358 с), уложена в катапультном кресле на место прежнего спасательного парашюта площадью 54 м2 и не влияет на инерционно-массовые характеристики катапультного кресла.
Далее по книге С.М. Алексеева и др. «Современные средства аварийного покидания самолета», Оборонгиз 1961 г. стр. 292.
"Начальный этап катапультирования происходит по штатной схеме до момента ввода в действие основного парашюта. Потеря времени с момента введения в действие купола основного парашюта до его полного наполнения обычно колеблется в пределах от 2 до 5 секунд и зависит в основном от конструкции парашюта, скорости введения его в действие и от индикаторной скорости полета". Площадь парашюта 19,47 м2 (в три раза меньше обычного), поэтому ограничимся 2с. t=v:g; v=9,81*2=19,62 м/с. Потеря высоты равняется h=g*t2:2=(9,81*22):2=19,62 м. "От полного наполнения (открытия) купола до достижения установившейся скорости снижения проходит от 1 до 2 секунд." Размер и конструктивные особенности парашюта позволяют принять 1 сек. Дополнительная потеря высоты h=9,81*12:2=4,905 м. Общая потеря высоты 19,62 м + 4,905 м=24,5 м; 45 м - 24,5 м=20,5 м. На истинной высоте 20 м скорость Vверт установившегося снижения равна будет равна Vсн=[2*146:(0,125*0,3*19,47)]0,5=19,998 м/с.
Информация (20 м) от лазерного дальномера, информация (19,998 м/сек) от вариометра, информация от тензометрического датчика веса пилота в снаряжении поступает в датчик, который обрабатывает поступившую информацию в реальную вертикальную скорость снижения, и если эта скорость снижения соответствует расчетной для текущей высоты 20 метров, датчик выдаст электрокоманду на включение воспламенителя РДТТ. Массовая плотность воздуха  вес спускаемой системы 146 кг; вес под куполом парашюта G=135 кг(пилот) + 5 кг(РДТТ)=140 кг;
вес спускаемой системы 146 кг; вес под куполом парашюта G=135 кг(пилот) + 5 кг(РДТТ)=140 кг;
Ртяги=m*ua+Fa(pa-pн)=0,343*3827+3,49*(0,62872-1,032)=1312,661:9,81-1,41=132,43 кгс. 132,43*cos40°=101,449 кгс - вертикальная составляющая.
101,449*2(сопла)=202,899=203 кгс; m=140 кгс:9,81=14,271; а=203 кгс:14,271=14,225 м/с2; по формуле равномерно замедленного движения
Vt=VO-a*t=19,998-14,225*1,358=0,68 м/с. h=(V2o-V2t):2a=(19,9982-0,682):2*14,225=14 м. На этой высоте включится РДТТ, парашют отбросится в сторону и парашютист, частично обезвешенный работой РДТТ, опустится на землю с вертикальной скоростью Vt=0,68 м/с. При опоре ногами о землю снимается растягивающая нагрузка со стренги, срабатывает пиромеханический разъем стренги и подвесной системы, РДТТ на остатках топлива вместе с буксировочной стренгой уходит по восходящей траектории в сторону.
Таким образом при текущей (истинной) высоте 20 м, которую отследил высотомер и передал информацию в датчик, датчик включит в работу пороховой двигатель чуть позже на высоте равной 14 м из-за более плотной массы воздуха в эшелоне относительной высоты, равной 45 метрам, чем на высоте 4000 метров, где определялась тяговооруженность РДТТ под вес пилота в 135 кг со снаряжением и время работы РДТТ.
Если катапультирование произошло над лесным массивом, а установившаяся вертикальная скорость снижения на парашюте достигла расчетной 20 м/с (72 км/час) и высота достаточна для маневрирования, то пилот может использовать парусность частей тела, манипулируя ими в скоростном потоке, и смещаться по горизонтали на какое-то расстояние до приемлемой посадочной площадки, прежде чем лазерный дальномер просигналит датчику о текущей высоте 20 м, датчик включит РДТТ и отсоединит парашют.
Если катапультирование произошло над лесным массивом и лазерный дальномер за нулевую точку отсчета текущей высоты 20 м принял крону дерева или, например, макушку сосны высотой 40 м, то датчик выдаст команду на срабатывание РДТТ на высоте сосны 40 м + высота текущая 20 м; на суммарной высоте 60 м отсоединится парашют и пилот будет спускаться на РДТТ 20 метров на расчетной по времени тяге (1,35 с) и достигнет макушки 40 метровой сосны. В этот момент парашютист рывком на подвесной системе вытяжного кольца должен разомкнуть пиромеханическую связь подвесной системы и буксировочной стренги, и РДТТ на (запланированных) остатках топлива уйдет вместе со стренгой в сторону, а пилот будет вынужден с помощью подручных средств, например, с помощью малогабаритного фрикционного механизма для спуска с Н=50 м (весит 0,2 кг) эвакуироваться с 40-метровой сосны.
Если снижение происходит над водной поверхностью, парашютист, вблизи от воды, рывком на подвесной системе вытяжного кольца размыкает пиромеханическую связь подвесной системы и буксировочной стренги и РДТТ уходит вместе со стренгой в сторону.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ ПРИЗЕМЛЕНИЯ ЛЕТЧИКА ПОСЛЕ КАТАПУЛЬТИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2544076C1 |
| СПОСОБ И СИСТЕМА НАПОЛНЕНИЯ КУПОЛА ПАРАШЮТА | 2019 |
|
RU2713689C1 |
| КАТАПУЛЬТНОЕ УСТРОЙСТВО ДЛЯ АВАРИЙНОГО СПАСЕНИЯ ПИЛОТА | 2002 |
|
RU2232698C1 |
| СПОСОБ КАТАПУЛЬТИРОВАНИЯ ЛЕТЧИКА ИЗ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2621133C1 |
| СПОСОБ АВАРИЙНОГО СПАСЕНИЯ ЛЕТЧИКА | 2008 |
|
RU2382722C2 |
| СИСТЕМА КАТАПУЛЬТИРОВАНИЯ ИЗ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2540133C1 |
| СПОСОБ КАТАПУЛЬТИРОВАНИЯ ЛЕТЧИКА (ПАССАЖИРА) ИЗ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2538481C1 |
| СПОСОБ И СИСТЕМА КАТАПУЛЬТИРОВАНИЯ НА БОЛЬШИХ ИНДИКАТОРНЫХ СКОРОСТЯХ ПОЛЕТА | 2022 |
|
RU2788230C1 |
| СПОСОБ И СИСТЕМА ИНФОРМИРОВАНИЯ ЭКИПАЖА О БЕЗОПАСНОСТИ КАТАПУЛЬТИРОВАНИЯ | 2021 |
|
RU2774269C1 |




Группа изобретений относится к аварийным средствам покидания самолета. Способ приземления парашютиста заключается в использовании порохового двигателя и датчика, который электрической командой включает пороховой двигатель в зависимости от текущей высоты, вертикальной скорости снижения и предварительно измеренной массы летчика в снаряжении. Пороховой двигатель выполнен с минимально возможным временем работы и оптимальным направлением действия тяги. Информацию о весе парашютиста в снаряжении передают от тензометрического измерителя в процессе установившегося снижения датчику, которым включают пороховой двигатель электрической командой. Система снижения вертикальной скорости приземления парашютиста содержит пороховой двигатель, устанавливаемый под крышкой сиденья катапультного кресла, датчик, измеряющий текущую высоту, вертикальную скорость снижения и получающий информацию о массе летчика в снаряжении. Пороховой двигатель прикреплен к соединенной с парашютной подвесной системой буксировочной стренге и быстроразъемным соединением к парашюту с уменьшенной площадью поверхности купола. Группа изобретений направлена на расширение арсенала технических средств. 2 н.п. ф-лы, 6 ил.
1. Способ приземления парашютиста, заключающийся в использовании порохового двигателя и датчика, который электрической командой включает пороховой двигатель в зависимости от текущей высоты, вертикальной скорости снижения и предварительно измеренной массы летчика в снаряжении, причем пороховой двигатель выполнен с минимально возможным временем работы и оптимальным направлением действия тяги, отличающийся тем, что информацию о весе парашютиста в снаряжении передают от тензометрического измерителя в процессе установившегося снижения датчику, которым включают пороховой двигатель электрической командой.
2. Система снижения вертикальной скорости приземления парашютиста, содержащая пороховой двигатель, устанавливаемый под крышкой сиденья катапультного кресла, датчик, измеряющий текущую высоту, вертикальную скорость снижения и получающий информацию о массе летчика в снаряжении, отличающаяся тем, что пороховой двигатель прикреплен к соединенной с парашютной подвесной системой буксировочной стренге и быстроразъемным соединением к парашюту с уменьшенной площадью поверхности купола для возможности спуска на повышенной вертикальной скорости до момента начала работы порохового двигателя, которым на минимальной вертикальной скорости завершают стадию спуска до приземления.
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ ПРИЗЕМЛЕНИЯ ЛЕТЧИКА ПОСЛЕ КАТАПУЛЬТИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2544076C1 |
| US 0003862731 A1, 28.01.1975 | |||
| US 0004527758 A1, 09.07.1985. | |||

