Предлагаемый способ относится к области космонавтики, а именно к системам траекторных измерений межпланетных космических аппаратов.
Известны способы определения погрешностей при траекторных измерениях межпланетных космических аппаратов (патенты РФ №№2.107.306, 2.578.003 С1, 31663 U1; патент США №7.197.381; заявка США №2.010.012.4895; Яковлев О.И. Космическая радиофизика, М.: 1998, 432 с. и другие).
Из известных наиболее близким к предлагаемому является «Способ определения погрешностей при траекторных измерениях межпланетных космических аппаратов за счет распространения радиосигналов в ионосфере Земли и межпланетной плазме» (патент РФ №2.578.003, B64G 3/00, 2016), который и выбран в качестве прототипа.
Известно, что на практике при проведении траекторных измерений межпланетных космических аппаратов (МКА) используют измерение двух параметров движения МКА - наклонной дальности до МКА R и радиальной составляющей скорости МКА относительно измерительной станции R, которые последовательно измеряются несколькими территориально разнесенными измерительными станциями (ИС) [4].
В состав погрешности измерений R и  входят погрешности, вызываемые распространением радиоволн в ионосфере Земли и ионизированной межпланетной плазме.
входят погрешности, вызываемые распространением радиоволн в ионосфере Земли и ионизированной межпланетной плазме.
При совершенствовании космической техники аппаратурные погрешности измерений R и уменьшаются и по мере их уменьшения доля погрешностей за счет распространения радиоволн в суммарных погрешностях траекторных измерений увеличивается. Погрешности распространения становятся сравнимыми по величине с аппаратурными погрешностями и даже превышают их.
Учет погрешностей траекторных измерений за счет распространения радиоволн на практике осуществляется расчетным путем. Точность получения результатов при этом оказывается очень низкой. Поэтому актуальной задачей является реальное измерение погрешностей за счет распространения радиоволн объективными методами с необходимой точностью. Для этих целей используется двухчастотный метод в радиоинтерферометрии со сверхдлинными базами (РСДБ) [3].
В результате корреляционной обработки радиосигналов, принимаемых от МКА и опорного квазара, находящегося от него на минимальном угловом расстоянии с точно известными координатами, которые служит информационной основой для определения относительного углового положения МКА и квазара на небесной сфере. Точные положения используемых при измерениях квазаров даются соответствующими каталогами квазаров [5].
Разница в положении квазара, взятого из каталога, и измеренного радиоинтерферометром со сверхдлинными базами (РСДБ), вызвана погрешностями измерений, за счет распространения радиосигналов через межпланетную плазму и ионосферу Земли.
Технической задачей изобретения является повышение достоверности в измерении погрешностей траекторных измерений МКА, вызванных распространением измерительных радиосигналов через ионизированную среду, путем точного и однозначного определения местоположения ближайшего опорного квазара.
Поставленная задача решается тем, что способ определения погрешностей при траекторных измерениях межпланетных космических аппаратов, возникающих за счет прохождения радиосигнала через ионосферу Земли и межпланетную плазму, заключающийся, в соответствии с ближайшим аналогом, в том, что в процессе проведения траекторных измерений дальности и радиальной составляющей скорости МКА, кроме измерительных сигналов с МКА на частоте fo1, принимают сигналы с квазара на излучаемой им частоте f01 и частоте f02, значительно отличающейся от частоты f01, при этом обеспечивают минимальный сдвиг по времени между измерениями с МКА и квазара, выбирают угловое положение квазара таким образом, чтобы проекция его положения на небесной сфере была максимально приближена к положению МКА во время траекторных измерений так, чтобы трассы прохождения сигналов от МКА и квазара к измерительной станции практически совпадали по измеренным значениям принятых с квазара излучаемых им частот fпр1 и fпр2, определяют двухчастотным методом смещение частоты fпр1 относительно частоты f01, равной Δf1, по измеренным значениям принятых с квазара частот fпр1 и fпр2 равное погрешности в измерениях скорости МКА из-за практического совпадения трасс прохождения сигналов от МКА и квазара, кроме того, по величине смещения частот Δf1 определяют интегральную электронную концентрацию трассы квазар - измерительная станция, и по ее величине вычисляют временную задержку Δt прохождения сигнала f01, которая практически равна погрешности измерения дальности Δt С, где С - скорость света, при траекторных измерениях МКА полученные данные передают в баллистический центр совместно с результатами траекторных измерений МКА для расчета траектории МКА, отличается от ближайшего аналога тем, что приемные пункты размещают в виде прямоугольного треугольника, формируют радиоинтерферометр с тремя сверхдлинными базами в азимутальной, угломестной и гипотенузной плоскостях соответственно, принимают сигналы от квазара на частоте f02, измеряют разности фаз между ними:


где d1, d2, d3 - сверхдлинные измерительные базы;
λ - длина волны с частотой f02;
α, β, γ - азимут, угол места и угол ориентации квазара,
формируют фазовые шкалы отсчетов угловых координат α, β, γ: точные, но неоднозначные, перемножают сигнал, принимаемый вторым пунктом с сигналом, принимаемым первым пунктом и пропущенным через первый блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное первой корреляционной функции R1(τ), где τ-несущая временная задержка, изменяют временную задержку до получения максимального значения первой корреляционной функции R1(τ), что соответствует равенству τ=τз1, и определяют азимут квазара
перемножают сигнал принимаемый третьим пунктом с сигналом, принимаемым первым пунктом и пропущенным через второй блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), изменяют временную задержку τ до получения максимального значения второй корреляционной функции R2(τ), что соответствует равенству τ=τЗ2, и определяют угол места квазара
перемножают сигнал, принимаемый вторым пунктом, с сигналом, принимаемым третьим пунктом и пропущенным через третий блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное третьей корреляционной функции R3(τ), изменяют временную задержку τ до получения максимального значения третьей корреляционной функции R3(τ), что соответствует равенству τ=τз2, и определяют угол ориентации квазара

формируют временные шкалы отсчета угловых координат α, β и γ: грубые, но однозначные, по измеренным значениям угловых координат α, β и γ точно и однозначно определяют местоположение квазара.
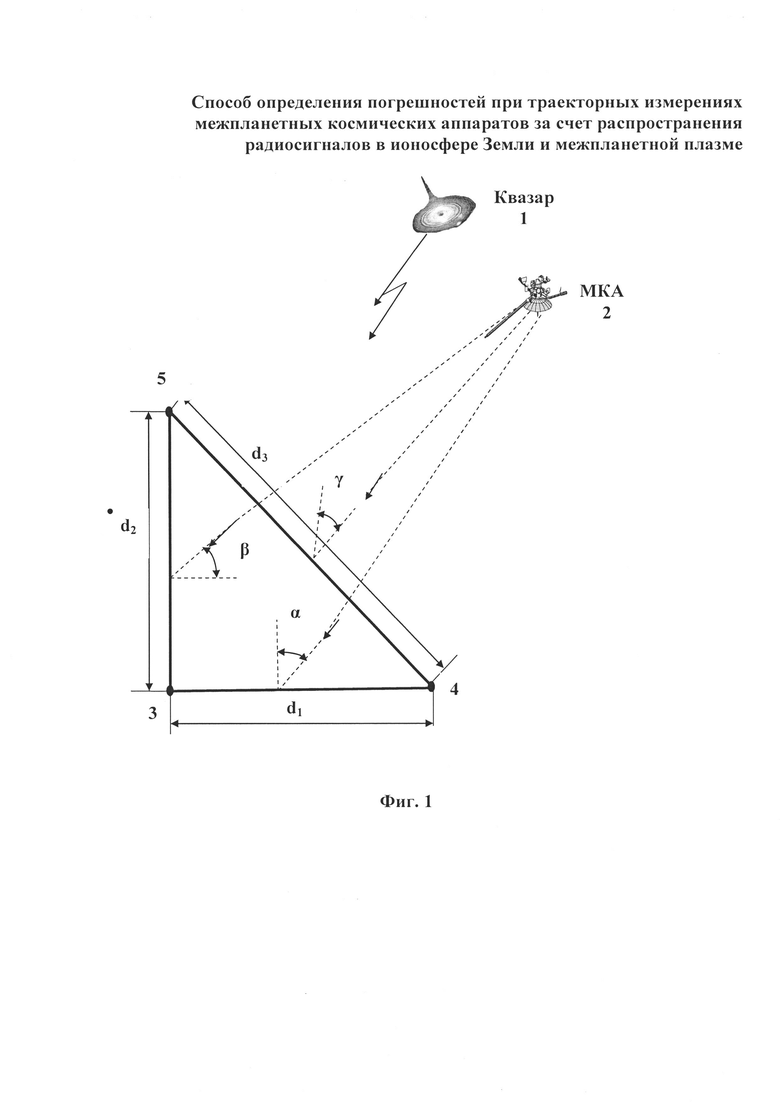
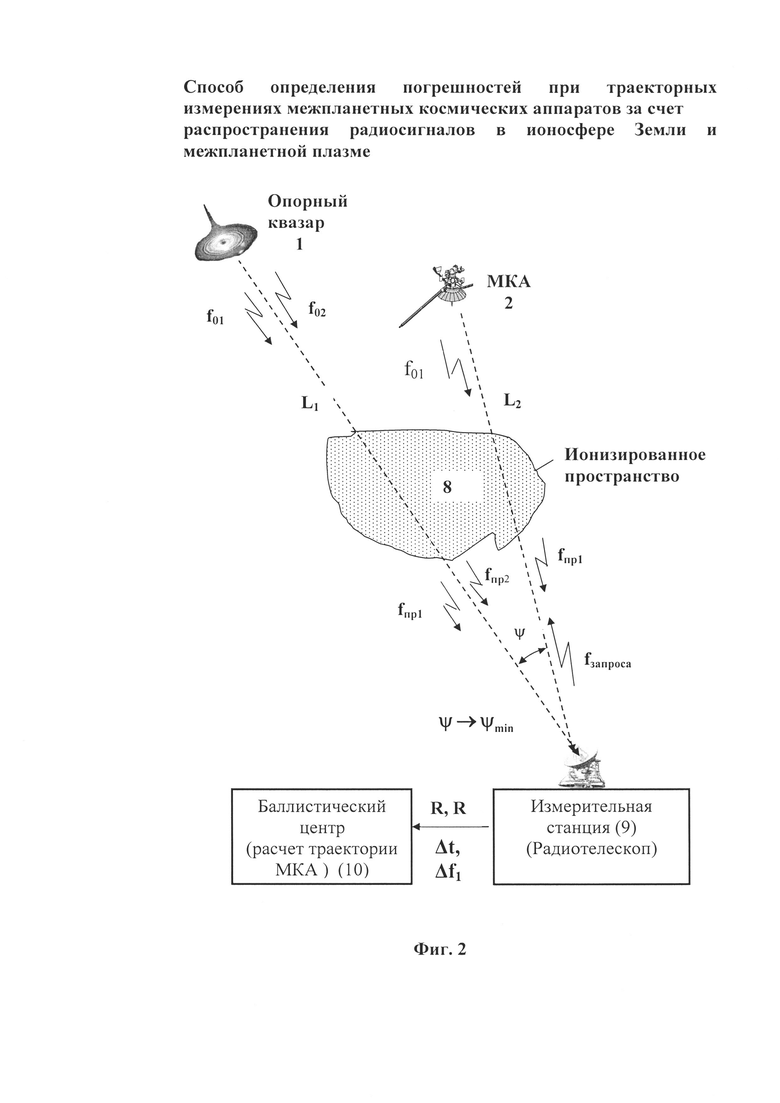
Взаимное расположение приемных пунктов 3, 4, 5, квазара 1 и МКА 2 показано на фиг. 1. Взаимное расположение измерительной станции 9, ионизированного пространства 8, квазара 1 и МКА 2 показано на фиг. 2. Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг. 3.
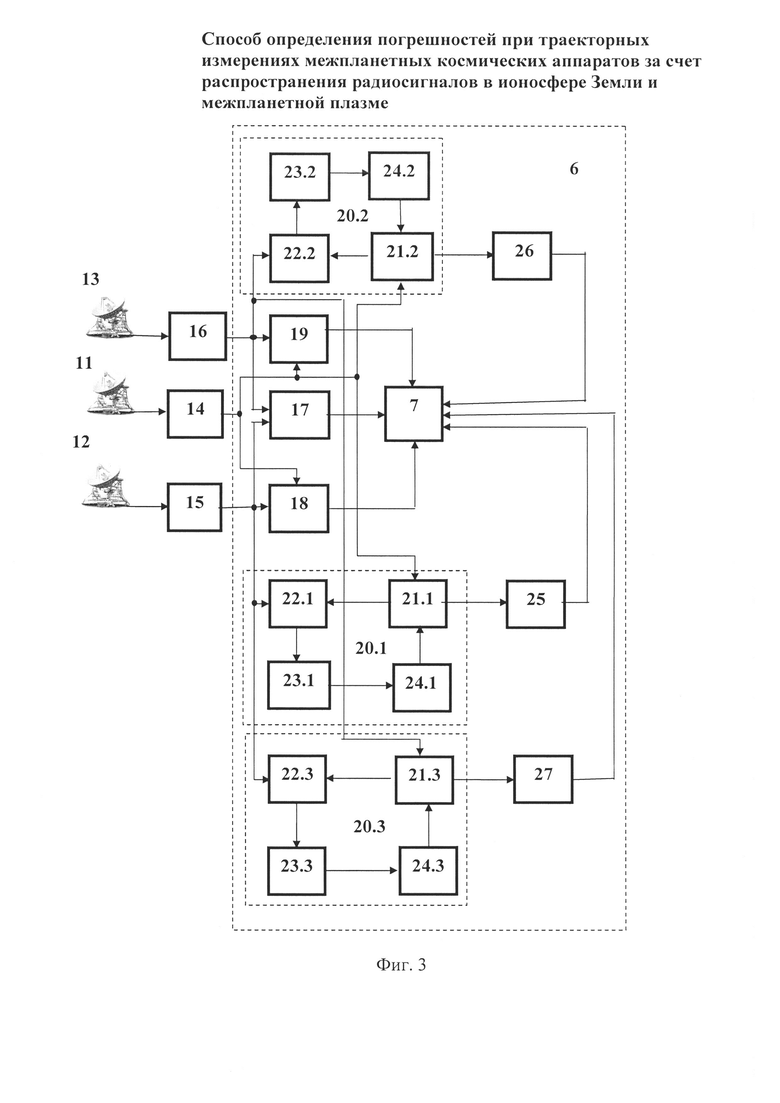
Устройство содержит три приемных пункта, каждый из которых состоит из последовательно включенных приемной антенны 11 (12, 13), полосового фильтра 14 (15, 16) и фазометра 17 (18, 19), выход которого подключен к компьютеру 7. К выходу второго полосового фильтра 15 последовательно подключено первый перемножитель 22.1, второй вход которого через первый блок 21.1 регулируемой задержки соединен с выходом первого полосового фильтра 14, первый фильтр 23.1 нижних частот и первый экстремальный регулятор 24.1, выход которого соединен с вторым входом первого блока 21.1 регулируемой задержки, второй вход которого через индикатор 25 азимута подключен к четвертому входу компьютера 7. К выходу третьего полосового фильтра 16 последовательно подключены второй перемножитель 22.2, второй вход которого через второй блок 21.2 регулируемой задержки соединен с выходом первого полосового фильтра 14, второй фильтр 23.2 нижних частот и второй экстремальный регулятор 24.2, выход которого соединен с вторым входом второго блока 21.2 регулируемой задержки, второй выход через индикатор 26 угла места подключен к пятому входу компьютера 7. К выходу второго полосового фильтра 15 последовательно подключены третий перемножитель 22.3, второй вход которого через третий блок 21.3 регулируемой задержки соединен с выходом третьего полосового фильтра 16, третий фильтр 23.3 нижних частот и третий экстремальный регулятор 24.3, выход которого подключен к второму входу третьего блока 21.3 регулируемой задержки, второй выход которого через индикатор 27 угла ориентации подключен к шестому входу компьютера 7. Первый блок 21.1 регулируемой задержки, первый перемножитель 22.1, первый фильтр 23.1 нижних частот и первый экстремальный регулятор 24.1 образуют первый коррелятор 20.1.
Второй блок 21.1 регулируемой задержки, второй перемножитель 22.2, второй фильтр 23.2 нижних частот и второй экстремальный регулятор 24.2. образуют второй коррелятор 20.2.
Третий блок 21.3 регулируемой задержки, третий перемножитель 22.3, третий фильтр 23.3 нижних частот и третий экстремальный регулятор 24.3 образуют третий коррелятор 20.3.
Предлагаемый способ реализуют следующим образом.
Приемные пункты 3,4 и 5 размещают в виде прямоугольного треугольника, образуя три сверхдлинные измерительные базы d1, d2 и d3 в азимутальной, прямоугольной и гипотенузной плоскостях соответственно (фиг. 1). Принимаемые сигналы
u1(t)=U1cos(2πf02t+ϕ1),
u2(t)=U2cos(2πfo2t+ϕ2),
u3(t)=U3cos(2πfo2t+ϕ3),
от квазара 1 на частоте f02 выделяются полосовыми фильтрами 14, 15 и 16 соответственно и подаются на входы фазометров 17, 18 и 19. Последние измеряют следующие разности фаз:

где d1, d2 и d3 - сверхдлинные измерительные базы,
λ - длина волны с частотой f02;
α, β и γ - азимут, угол места и угол ориентации квазара,
которые фиксируются компьютером 7. Так формируются фазовые шкалы отсчета угловых координат α, β и γ квазара: точные, но неоднозначные.
Принимаемые сигналы u1(t), u2(t) и u3(t) одновременно поступают на два входа корреляторов 20.1, 20.2 и 20.3. Получаемые на выходе фильтров 23,1, 23.2 и 23.3 корреляционные функции R1(τ), R2(τ) и R3(τ) имеют максимум при значении введенного регулируемого запаздывания:
τ=τз1, τ=τз2, τ=τз3.
Максимальные значения корреляционных функций R1(τ), R2(τ) и R3(τ) поддерживаются автоматически с помощью экстремальных регуляторов 24.1, 24.3 и 24.3, воздействующих на управляющие входы блоков 21.1, 21.2 и 21.3 регулируемой задержки. Индикаторы 25, 26 м 27 градуируются непосредственно в значениях угловых координат α, β и γ квазара:

Значения угловых координат α, β и γ фиксируются компьютером 7. Так формирующиеся временные шкалы отсчета угловых координат α, β и γ квазара: грубые, но однозначные.
По измеренным значениям угловых координат α, β и γ определяется местоположение квазара. В предлагаемом способе измерения погрешностей траекторных измерений МКА используются космические источники излучения (квазары), расположенные на небесной сфере вблизи МКА за счет прохождения радиосигналов через ионизирующую среду путем измерения двух изменений частот, излучаемых квазаром, при приеме их наземной измерительной станцией (фиг. 2).
Соотношения частот определяются двумя выражениями:
где f01 и f02 - частоты сигналов, излучаемых квазаром.
При этом одна частота f01 совпадает с частотой, на которой проводятся траекторные измерения МКА, а другая частота f02 выбирается со значительным отличием от f01. Для обеспечения когерентности частот принимаемых с квазара сигналов, гетеродины приемников измерительной станции 9 должны быть когерентны.
Δf1 и Δf2 - изменения значений излучаемых частот за счет прохождения сигналов через ионизированные области космического пространства;
fпр1 и fпр2 - значения частот сигналов, принимаемых наземными измерительными станциями;
 - соотношение частот, излучаемых квазаром;
- соотношение частот, излучаемых квазаром;
 - (2) соотношение величины изменения частот, за счет
- (2) соотношение величины изменения частот, за счет
прохождения сигналов через ионизированное пространство.
Уравнение (2) может быть преобразовано

Решив уравнения (1) и (2) относительно Δf1, получим величину изменения частоты f01 через значения принимаемых частот fпр1 и fпр2
при значении m>2-3, единицей в знаменателе можно пренебречь. Тогда
Ввиду малого значения угла ψ (фиг. 2) линия прохождения сигналов квазара L1 и МКА L2 проходят через ионизированную плазму 8 на близком расстоянии и можно считать, что значение интегральной электронной концентрации ионосферы и межпланетной плазмы вдоль линий L1 и L2, близки.
Поэтому измеренное вдоль линии L1 значение сдвига частоты сигнала f01 будет иметь то же значение, что и при прохождении сигнала вдоль линии L2, т.е. измеренное значение Δf1 будет являться значением погрешности при измерении радиальной скорости МКА.
Для определения погрешности измерения дальности МКА необходимо решить обратную задачу, т.е. измеренному значению сдвига частоты Δf1 определить интегральную электронную концентрацию ионосферы вдоль линии L2, а по ней определить запаздывание радиосигнала Δt по линии L2, которое фактически будет являться погрешностью измерения дальности до МКА вдоль линии L2, Δt c=ΔR.
Такие измерения погрешностей за счет распространения радиосигналов в ионизированном пространстве с использованием квазара 1 необходимо проводить в каждом сеансе траекторных измерений МКА 2, а результаты передавать в баллистический центр для учета этих погрешностей при расчете траектории МКА.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение достоверности в измерении погрешностей траекторных измерений МКА, вызванных распространением измерительных радиосигналов через ионизированную среду. Это достигается за счет точного и однозначного определения местоположения ближайшего квазара.
Следует отметить, что расположение приемных пунктов в виде прямоугольного треугольника продиктовано новой идеологией фазовой пеленгации источников радиоизлучений в пространстве, которая обеспечивает определение местоположения квазара пассивным методом. Причем для точного и однозначного определения местоположения квазара используются фазовые шкалы отсчета угловых координат α, β и γ: точные, но неоднозначные, и временные шкалы отсчета угловых координат α, β и γ: грубые, но однозначные, полученные за счет корреляционной обработки принимаемых сигналов.
Радиоинтерферометры со сверхдлинными базами, реализующие метод прямоугольного треугольника, отличаются новизной, оригинальностью и могут найти широкое практическое применение для точного и однозначного определения местоположения квазаров и МКА.
Литература
1. Патент РФ №2.578.003, В64 G 3/00, 2016.
2. Яковлев О.И. Космическая радиофизика. М.: «Научная книга», 1998.
3. Радиосистемы межпланетных космических аппаратов. / Под ред. А.С. Винницкого. - М.: Радио и связь, 1993.
4. Молотов Е.П. Наземные радиотехнические системы управления космическими аппаратами. - М.: ФИЗМАТЛИТ, 2004 - 256 с.
5. Каталог квазаров ICRF - Международная небесная система отсчета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ПРИ ТРАЕКТОРНЫХ ИЗМЕРЕНИЯХ МЕЖПЛАНЕТНЫХ КОСМИЧЕСКИХ АППАРАТОВ ЗА СЧЕТ РАСПРОСТРАНЕНИЯ РАДИОСИГНАЛОВ В ИОНОСФЕРЕ ЗЕМЛИ И МЕЖПЛАНЕТНОЙ ПЛАЗМЕ | 2014 |
|
RU2578003C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ВНЕЗЕМНЫХ ОБЪЕКТОВ РАДИОИНТЕРФЕРОМЕТРАМИ СО СВЕРХДЛИННЫМИ БАЗАМИ | 2016 |
|
RU2624638C1 |
| РАДИОИНТЕРФЕРОМЕТРИЧЕСКИЙ СПОСОБ ИССЛЕДОВАНИЯ ОБЪЕКТОВ БЛИЖНЕГО И ДАЛЬНЕГО КОСМОСА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2624912C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2612127C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2000 |
|
RU2165628C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539914C1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |
| ГЛОБАЛЬНАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2024 |
|
RU2833299C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
Изобретение относится к слежению за полётом межпланетных космических аппаратов (МКА) (2), куда вносит погрешности прохождение радиосигналов от МКА (на частоте f01) и близкого к нему на небесной сфере квазара (1) (на частотах f01 и f02) через ионизированную среду (8). По смещению Δf1 = f01- fпр1 принятой с квазара частоты fпр1 двухчастотным методом определяют погрешность измерений скорости МКА, а также интегральную электронную концентрацию среды (8) и по ее величине - временную задержку сигнала с частотой f01. Приемные пункты (9) размещают в вершинах прямоугольного треугольника-интерферометра с тремя сверхдлинными базами: в азимутальной, угломестной и гипотенузной плоскостях. Принятые интерферометром сигналы, излученные квазаром на частоте f02, обрабатывают, используя блоки регулируемой задержки и корреляционные функции. В итоге точно и однозначно определяют местоположение квазара (1). Техническим результатом изобретения является повышение достоверности определения погрешностей траекторных измерений МКА. 3 ил.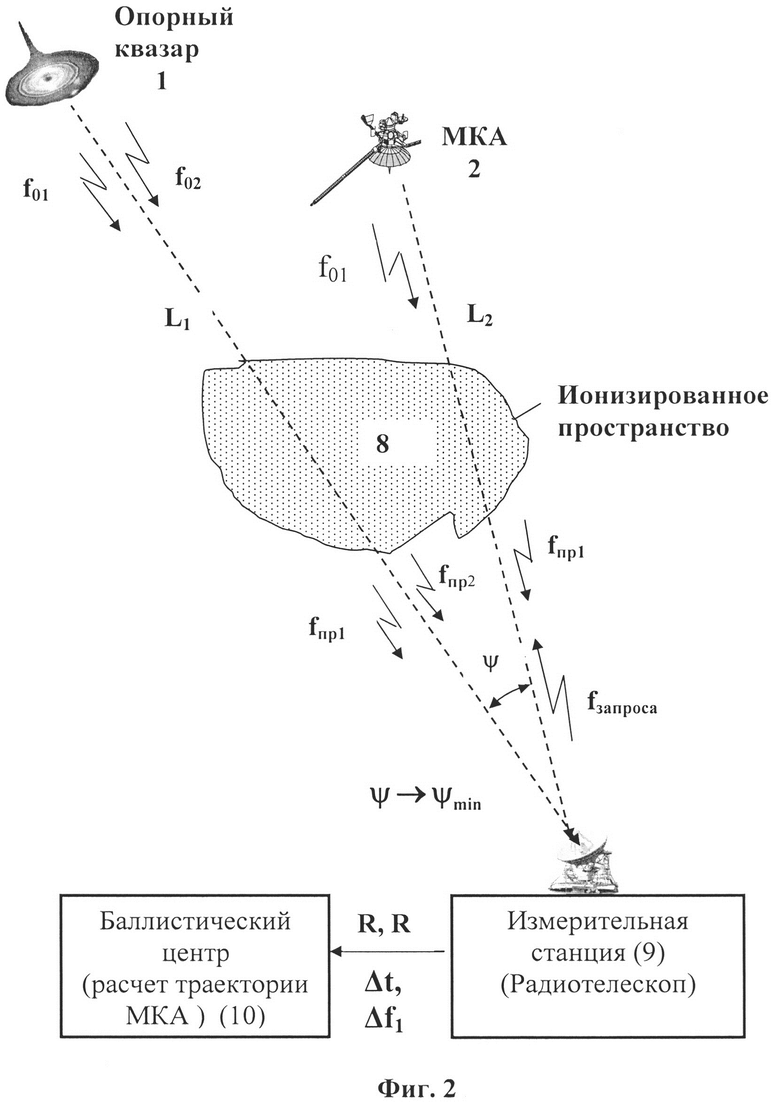
Способ определения погрешностей при траекторных измерениях межпланетных космических аппаратов (МКА) за счет распространения радиосигналов в ионосфере Земли и межпланетной плазме, заключающийся в том, что в процессе проведения траекторных измерений дальности и радиальной составляющей скорости МКА, кроме измерительных сигналов с МКА на частоте f01, принимают сигналы с квазара, излучаемые им на частоте f01 и частоте f02, значительно отличающейся от частоты f01, при этом обеспечивают минимальный сдвиг по времени между измерениями с МКА и квазара, выбирают угловое положение квазара таким образом, чтобы проекция его положения на небесной сфере была максимально приближена к положению МКА во время траекторных измерений, при этом трассы прохождения сигналов от МКА и квазара к измерительной станции практически совпадают, по измеренным значениям принятых с квазара частот fпр1 и fпр2 определяют двухчастотным методом смещение Δf1 принятой с квазара частоты fпр1 относительно частоты f01, которое считают равным погрешности в измерениях скорости МКА из-за практического совпадения трасс прохождения сигналов от МКА и квазара, кроме того, по величине смещения частоты Δf1 определяют интегральную электронную концентрацию вдоль трассы квазар - измерительная стация и по ее величине вычисляют временную задержку Δt прохождения сигнала с частотой f01, которая практически равна погрешности измерения дальности Δt С, где С - скорость света, при траекторных измерениях МКА, полученные данные передают в баллистический центр совместно с результатами траекторных измерений МКА для расчета траектории МКА, отличающийся тем, что приемные пункты размещают в виде прямоугольного треугольника, формируют радиоинтерферометр с тремя сверхдлинными базами в азимутальной, угломестной и гипотенузной плоскостях, принимают сигналы от квазара на частоте f02, измеряют разности фаз между ними
где d1, d2 и d3 - сверхдлинные измерительные базы,
λ - длина волны с частотой f02,
α, β и γ - азимут, угол места и угол ориентации квазара,
формируют фазовые шкалы отсчетов угловых координат α, β и γ: точные, но неоднозначные, перемножают сигнал, принимаемый вторым пунктом, с сигналом, принимаемым первым и пунктом, пропускаемым через первый блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное первой корреляционной функции R1(τ), где τ - текущая временная задержка, изменяют временную задержку до получения максимального значения первой корреляционной функции R1(τ), что соответствует равенству τ=τз1, и определяют азимут квазара
перемножают сигнал, принимаемый третьим пунктом, с сигналом, принимаемым первым пунктом и пропущенным через второй блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное второй корреляционной функции R2(τ), изменяют временную задержку τ до получения максимального значения второй корреляционной функции R2(τ), соответствующего равенству τ=τз2, и определяют угол места квазара
перемножают сигнал, принимаемый вторым пунктом, с сигналом, принимаемым третьим пунктом и пропущенным через третий блок регулируемой задержки, выделяют низкочастотное напряжение, пропорциональное третьей корреляционной функции R3(τ), изменяют временную задержку τ до получения максимального значения третьей корреляционной функции R3(τ), соответствующего равенству τ=τз3, и определяют угол ориентации квазара
формируют грубые, но однозначные временные шкалы отсчета угловых координат α, β и γ, по измеренным значениям угловых координат α, β и γ точно и однозначно определяют местоположение квазара.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ПРИ ТРАЕКТОРНЫХ ИЗМЕРЕНИЯХ МЕЖПЛАНЕТНЫХ КОСМИЧЕСКИХ АППАРАТОВ ЗА СЧЕТ РАСПРОСТРАНЕНИЯ РАДИОСИГНАЛОВ В ИОНОСФЕРЕ ЗЕМЛИ И МЕЖПЛАНЕТНОЙ ПЛАЗМЕ | 2014 |
|
RU2578003C1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ СИСТЕМЫ РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2291558C2 |
| US 20100124895 A1, 20.05.2010 | |||
| US 7197381 B2, 27.03.2007. | |||

