ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к двигателю, включающему в себя вибратор.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0002] Известным является вибрационно-волновой двигатель (ультразвуковой двигатель), выполненный с возможностью относительного приведения в движение скользящего элемента посредством прижатия вибратора, который периодически вибрирует при приложении высокочастотного напряжения, к скользящему элементу. Ультразвуковой двигатель, раскрытый в выложенном Японском патенте № 2015-126692, включает в себя вибратор, фрикционный элемент, прижимной механизм для прижатия вибратора к фрикционному элементу, и механизм, выполненный с возможностью быть подвижным в направлении прижатия без какого-либо люфта в направление движения между основанием для фиксации вибратора и элементом, поддерживающим вибратор, для удержания основания. Таким образом, ультразвуковой двигатель, описанный в выложенном Японском патенте № 2015-126692, может удерживать вибратор без какого-либо люфта в направлении движения и может улучшить точность подачи элемента, поддерживающего вибрацию.
Однако в выложенном патенте Японии № 2015-126692, прижимной механизм для прижатия вибратора к фрикционному элементу уложен в направлении прижатия, посредством чего ультразвуковой двигатель увеличивается в направлении толщины. Механизм, выполненный подвижным в направлении прижатия без какого-либо люфта в направлении движения, также увеличивается в направлении движения. В результате трудно миниатюризировать узел ультразвукового двигателя, в то же время, обеспечивая прижимной механизм и механизм, предусмотренный быть подвижным в направлении прижатия без какого-либо люфта в направлении движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Ввиду этой проблемы, задачей настоящего изобретения является обеспечение двигателя, способного к миниатюризации, при обеспечении прижимного механизма, который прижимает вибратор к контактирующему элементу, и механизма, который выполнен с возможностью быть подвижным в направлении прижатия без какого-либо люфта в направлении движения.
[0005] Двигатель согласно одному аспекту настоящего изобретения включает в себя вибратор, множество прижимных элементов, которые прижимают вибратор к контактирующему элементу в контакт с вибратором, элемент передачи, который передает прижимное усилие, которое прикладывается множеством прижимных элементов, к вибратору, первый удерживающий элемент, который удерживает вибратор, второй удерживающий элемент, который удерживает передающий элемент, и соединительный элемент, который соединяет первый удерживающий элемент со вторым удерживающим элементом. Вибратор и контактирующий элемент движутся относительно посредством вибраций, которые возникают в вибраторе. Вибратор включает в себя выступающую часть, которая предусмотрена на поверхности, противоположной поверхности стороны элемента передачи. Множество прижимных элементов расположены отдельно для окружения выступающей части. Соединительный элемент расположен в положении ближе к выступающей части, чем множество прижимных элементов.
[0006] Двигатель согласно другому аспекту настоящего изобретения позволяет вибратору и контактирующему элементу, находящемуся в контакте с вибратором, перемещаться относительно путем вибрации вибратора. Двигатель включает в себя прижимной механизм, который включает в себя множество упругих элементов и элемент передачи, передающий усилие посредством множества упругих элементов к вибратору, и который прижимает вибратор к контактирующему элементу, первый элемент, который удерживает вибратор, второй элемент, который удерживает прижимной механизм, и соединительный элемент, который соединяет первый удерживающий элемент со вторым удерживающим элементом. Соединительный элемент включает в себя элемент качения, который позволяет первому и второму элементам относительно перемещаться в направлении прижима прижимного механизма. Множество упругих элементов расположены вокруг вибратора в плоскости, ортогональной направлению прижима. Элемент качения расположен в положении ближе к вибратору, чем множество упругих элементов, по меньшей мере, в одном направлении направления относительного передвижения вибратора и контактирующего элемента, или направлении, ортогональном как к направлению прижима, так и направлению относительного передвижения.
[0007] Дополнительные признаки настоящего изобретения будут более очевидными из следующего описания примеров вариантов осуществления (со ссылкой на прилагаемые чертежи).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
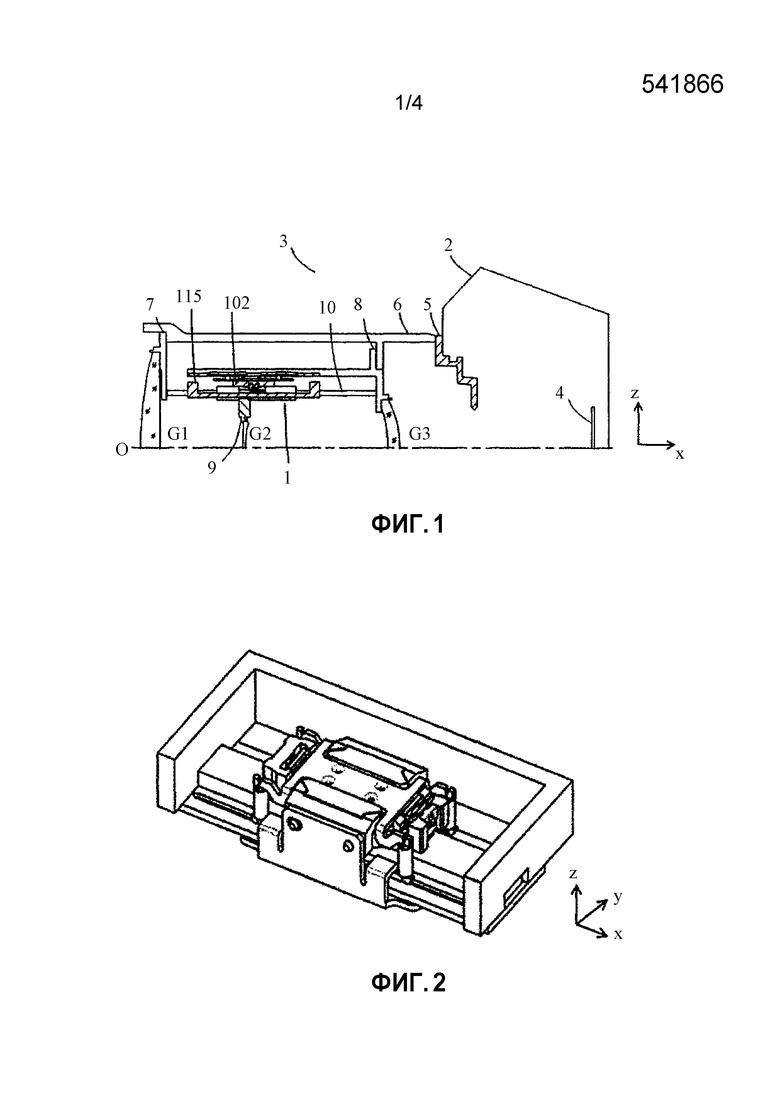
[0008] Фиг.1 представляет собой вид в разрезе основных компонентов электронной аппаратуры, включающей в себя ультразвуковой двигатель согласно варианту осуществления настоящего изобретения.
[0009] Фиг.2 представляет собой вид в перспективе ультразвукового двигателя согласно первому варианту осуществления.
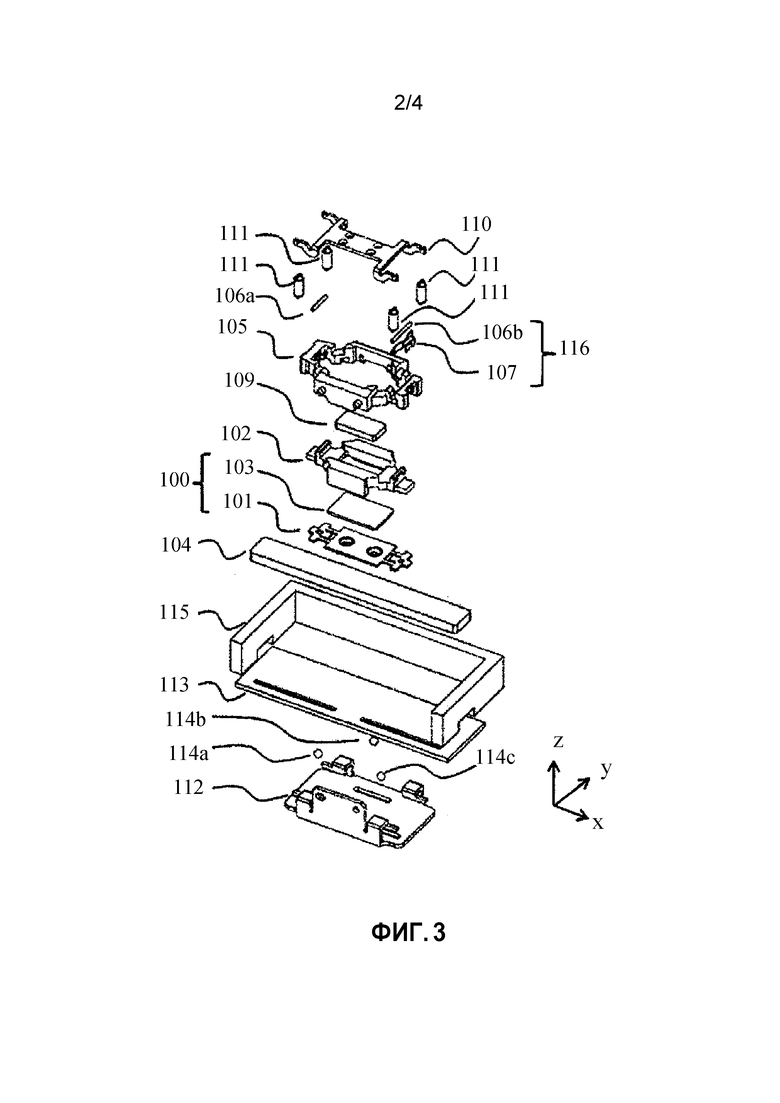
[0010] Фиг.3 представляет собой покомпонентный вид в перспективе ультразвукового двигателя согласно первому варианту осуществления.
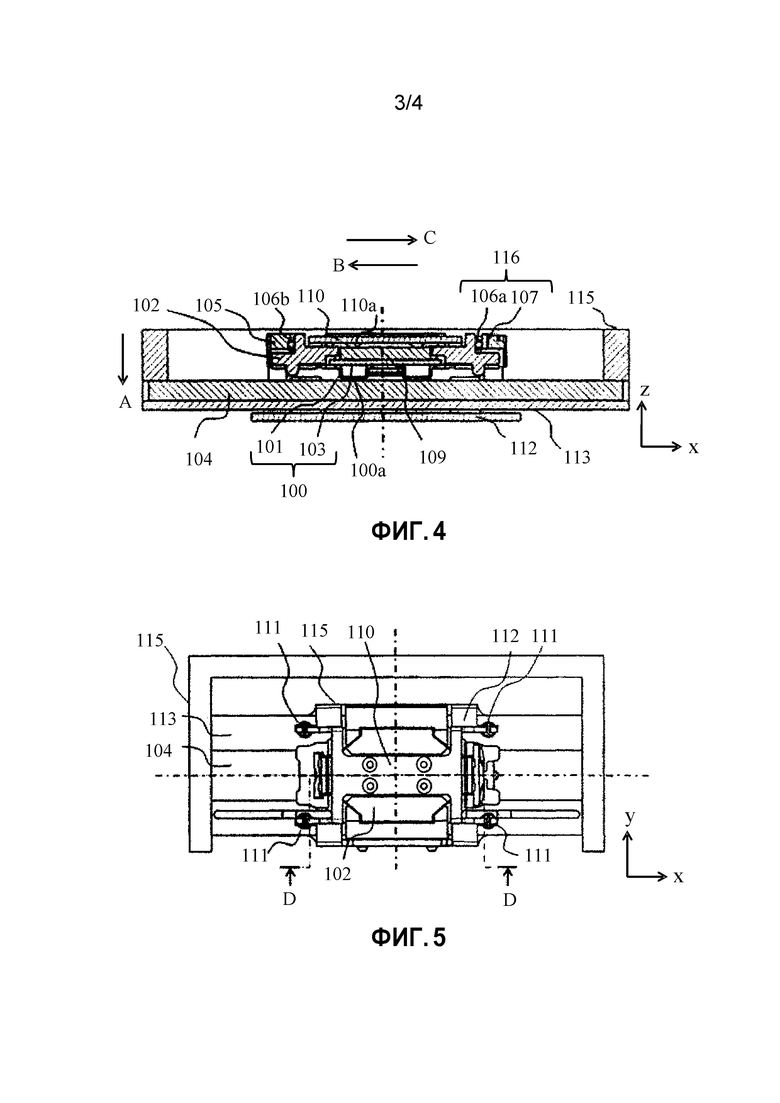
[0011] Фиг.4 представляет собой вид в разрезе основных компонентов ультразвукового двигателя согласно первому варианту осуществления.
[0012] Фиг.5 представляет собой вид сверху ультразвукового двигателя согласно первому варианту осуществления.
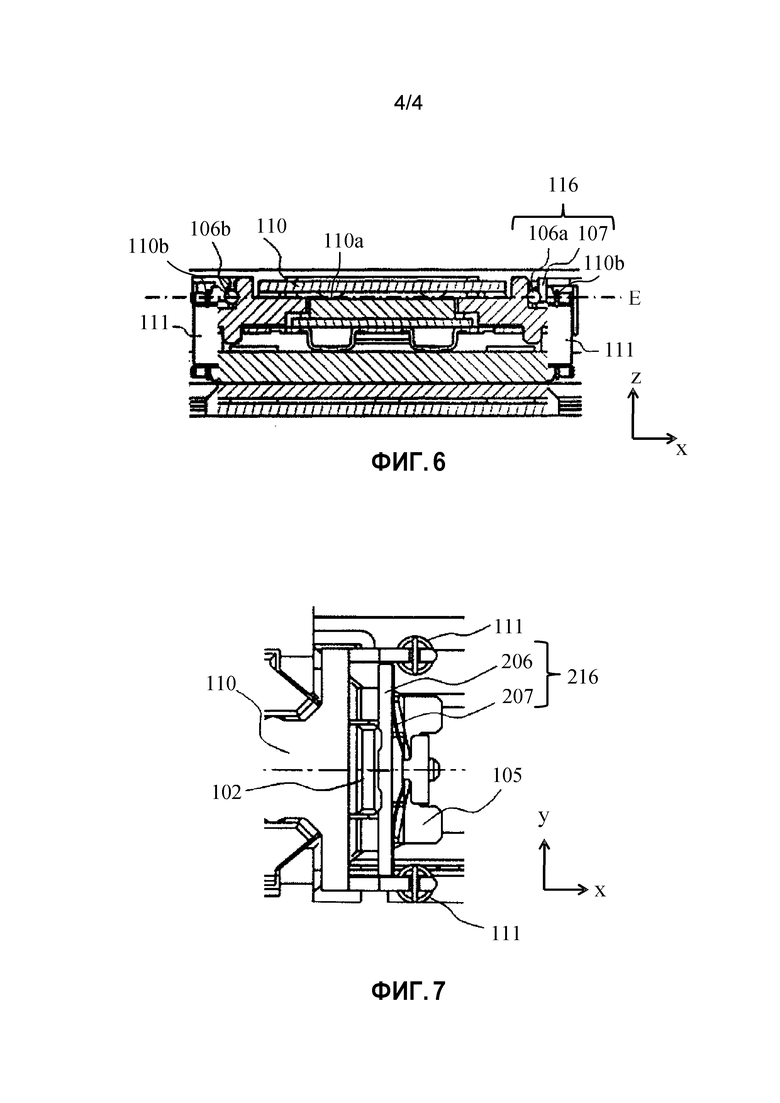
[0013] Фиг.6 представляет собой вид в разрезе по линии D-D на фиг.5.
[0014] Фиг.7 представляет собой увеличенный вид основных компонентов ультразвукового двигателя согласно второму варианту осуществления.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0015] Обращаясь теперь к прилагаемым чертежам, будет дано подробное описание вариантов осуществления настоящего изобретения. Те элементы на каждой фигуре, которые являются подобными элементами, будут обозначаться одними и теми же ссылочными позициями, и их описание будет опущено.
[0016] Фиг.1 представляет собой вид в разрезе основных компонентов оправы объектива в качестве одного примера электронной аппаратуры, включающей в себя ультразвуковой двигатель 1, который является вибрационно-волновым двигателем согласно варианту осуществления настоящего изобретения. Поскольку оправа объектива является приблизительно вращательно симметричной, на фиг.1 проиллюстрирована только ее верхняя половина. Кроме того, фиг.1 иллюстрирует оправу объектива, разъемно прикрепленную к аппаратуре для съемки изображения, в качестве одного примера электронной аппаратуры, включающей в себя ультразвуковой двигатель 1, который представляет собой вибрационно-волновой двигатель согласно варианту осуществления настоящего изобретения, однако аппаратура для съемки изображения, интегрированная с оправой объектива, рассматривается как еще один пример электронной аппаратуры.
[0017] Оправа 3 объектива съемно прикреплена к корпусу 2 камеры (аппаратуре для съемки изображения) посредством крепления 5, а элемент 4 для съемки изображения предусмотрен внутри корпуса 2 камеры. Для закрепления оправы 6 оправы 3 объектива, установлены передняя оправа 7 объектива, которая удерживает линзу G1, и задняя оправа 8 объектива, которая удерживает линзу G3. Удерживающая линзу рама 9 удерживает линзу G2 и удерживается прямолинейно с возможностью перемещения по направляющей планке 10, которая удерживается передней оправой 7 объектива и задней оправой 8 объектива. На опорной пластине 115 ультразвукового двигателя 1 образована фланцевая часть (не показана), которая должна быть прикреплена к задней оправе 8 объектива посредством винтов.
[0018] Когда приводится в движение подвижная часть, включающая в себя элемент 102, удерживающий вибратор, ультразвукового двигателя 1, движущая сила ультразвукового двигателя 1 передается на удерживающую линзу раму 9 через элемент 102, удерживающий вибратор и, таким образом, удерживающая линзу рама 9 перемещается линейно параллельно оптической оси O (оси x) по направляющей планке 10.
[0019] В этом варианте осуществления, ультразвуковой двигатель 1 установлен на оправе 3 объектива, который является электронной аппаратурой, но настоящее изобретение этим не ограничивается. Ультразвуковой двигатель 1 может быть установлен на электронной аппаратуре, отличной от оправы объектива и устройства съемки изображения. Кроме того, ультразвуковой двигатель 1 используется для перемещения линзы параллельно оптической оси O, но может использоваться для перемещения линзы коррекции нерезкости в направлении, ортогональном к оптической оси O.
[ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ]
[0020] Фигуры 2-5 представляют собой, соответственно, вид в перспективе, покомпонентный вид в перспективе, вид в разрезе основных компонентов, и вид сверху ультразвукового двигателя 1 согласно этому варианту осуществления.
[0021] Фрикционный элемент (контактирующий элемент) 104 и направляющий поддерживающий элемент 113 закреплены на опорной пластине 115 посредством винтов. Четыре прижимные пружины (прижимные элементы) 111, каждая из которых соединена с элементом 110 передачи прижимного усилия (передающим элементом), и элементом 112 передачи движущего усилия через соединительные удерживающие части, каждая из которых включает в себя элемент 110 передачи прижимного усилия и элемент 112 передачи движущего усилия. Сила натяжения пружины создается между элементом 110 передачи прижимающего усилия и элементом 112 передачи движущего усилия и притягивает элемент 110 передачи прижимающего усилия в направлении, показанном стрелкой А. Таким образом, прижимной механизм для прижима вибратора 100 к фрикционному элементу 104 включает в себя прижимные пружины 111, элемент 110 передачи прижимающего усилия и элемент 112 передачи движущего усилия. Элемент 110 передачи прижимающего усилия включает в себя прижимную часть 110а, образованную в виде приблизительно полусферической выступающей части, и для предотвращения повреждения пьезоэлектрического элемента 103, между пьезоэлектрическим элементом 103 и прижимной частью 110а расположен упругий элемент 109, так что они не вступают в прямой контакт друг с другом. Прижимные пружины 111 прижимают вибратор 100 в направлении, показанном стрелкой А, через эти элементы. Когда прижимные пружины 111 прижимают вибратор 100, прижимная контактная часть 100a, которая является выступающей частью, образованной на поверхности, противоположной поверхности на стороне элемента 110 передачи прижимающего усилия вибратора 100, входит в фрикционный контакт с фрикционным элементом 104. В этом варианте прижимные пружины 111 прижимают вибратор 100 в четырех положениях, но настоящее изобретение не ограничивается этим, поскольку множество прижимных элементов могут прижимать вибратор 100 в разных положениях. Кроме того, в этом варианте осуществления, пружины используются в качестве прижимных элементов, но настоящее изобретение не ограничено этим, поскольку вибратор 100 может быть прижат к фрикционному элементу 104.
[0022] Вибратор 100 включает в себя вибрационную пластину 101, и пьезоэлектрический элемент 103, прикрепленный к вибрационной пластине 101 посредством клея. Вибрационная пластина 101 прикреплена к элементу 102, удерживающему вибратор, посредством использования сварки или клея. Пьезоэлектрический элемент 103 возбуждает ультразвуковые колебания при приложении высокочастотного напряжения. Когда пьезоэлектрический элемент 103, который приклеен к вибрационной пластине 101, возбуждает ультразвуковые колебания, на вибраторе 100 возникает явление резонанса. То есть, вибратор 100 генерирует ультразвуковые колебания посредством применения к нему высокочастотного напряжения. В результате на конце прижимной контактной части 100а, образованной на вибраторе 100, происходит приблизительно эллиптическая вибрация.
[0023] Изменение частоты и фазы высокочастотного напряжения, приложенного к пьезоэлектрическому элементу 103, может соответствующим образом изменять направление вращения и эллиптическое отношение, соответственно, и, таким образом, может генерироваться требуемая вибрация. Соответственно, прижатие вибратора 100 к фрикционному элементу 104 создает движущую силу для относительного их перемещения, и, таким образом, вибратор 100 может перемещаться вдоль оси х (оптической оси О) относительно фрикционного элемента 104. Относительное направление движения вибратора 100 является ортогональным к направлению прижатия прижимных пружин 111.
[0024] Соединительный элемент 116, который включает в себя ролики (элементы качения) 106а, 106b и пластинчатую пружину (поджимающий элемент) 107, имеющую заданную упругость, встроен между элементом 102, удерживающим вибратор, и удерживающим корпусом 105 для удержания элемента 110 передачи прижимающего усилия. Ролик 106а зажат между пластинчатой пружиной 107 и элементом 102, удерживающим вибратор, чтобы он мог перемещаться в направлении, показанном стрелкой А (направлении прижима прижимных пружин 111). Пластинчатая пружина 107 расположена между удерживающим корпусом 105 и роликом 106а и имеет поджимающее усилие, параллельное оси х. То есть пластинчатая пружина 107 поджимает элемент 102, удерживающий вибратор в направлении, показанном стрелкой B через ролик 106a, и поджимает удерживающий корпус 105 в направлении, показанном стрелкой C. Посредством чего ролик 106b зажат между элементом 102, удерживающим вибратор и удерживающим корпусом 105.
[0025] При такой конструкции соединительный элемент 116 не вызывает люфта в направлении, параллельном оси х (направлении перемещения вибратора 100), и подавляет сопротивление скольжению в направлении, показанном стрелкой А (направлении прижатия прижимных пружин 111) посредством действия роликов 106а и 106b.
[0026] Кроме того, поджимающее усилие пластинчатой пружины 107 задается большей, чем сила инерции, за счет ускорения и замедления, возникающего при запуске и остановке привода удерживающего корпуса 105 и ведомой части. Посредством чего относительное смещение вдоль направления перемещения вибратора 100 посредством силы инерции во время движения не создается между вибратором 100, элементом 102, удерживающим вибратор, и удерживающим корпусом 105 и, таким образом, может быть реализовано стабильное управление движением.
[0027] В этом варианте осуществления ролики 106a и 106b используются в качестве элемента качения, входящего в соединительный элемент 116, но настоящее изобретение не ограничено этим, поскольку соединительный элемент 116 имеет возможность перемещаться в направлении, показанном как стрелка А. Например, шарики могут быть использованы вместо роликов. Кроме того, в этом примере используется пластинчатая пружина 107 в качестве поджимающего элемента, входящего в соединительный элемент 116, но настоящее изобретение не ограничивается этим, поскольку отсутствует генерирование люфта между удерживающим вибратор элементом 102 и удерживающим корпусом 105.
[0028] Элемент 112 для передачи движущего усилия прикреплен к удерживающему корпусу 105 посредством клея или завинчивания и передает движущее усилие, генерируемое в вибраторе 100. На элементе 112 для передачи движущего усилия образованы три V-образные канавки (направляющие части движущейся стороны), в которые вставлены шарики качения (направляющие элементы) 114a-114c, для направления удерживающего корпуса 105 вдоль оси x (оптической оси O). Направляющий поддерживающий элемент 113 расположен под фрикционным элементом 104. [0021] Фрикционный элемент 104 и направляющий поддерживающий элемент 113 закреплены на опорной пластине 115 посредством винтов. На направляющем поддерживающем элементе 113 образованы три канавкообразные неподвижные боковые направляющие части. Шарики 114a-114c качения находятся каждый в промежутке между подвижной боковой направляющей частью, образованной на элементе 112 для передачи движущего усилия, и неподвижной боковой направляющей частью, образованной на направляющем поддерживающем элементе 113. Посредством этих элементов, удерживающий корпус 105 поддерживается подвижным вперед или назад вдоль оси x (оптической оси O). В этом варианте осуществления, из трех неподвижных направляющих боковых частей, образованных на направляющем поддерживающем элементе 113, две являются V-образными канавками, а одна представляет собой плоскую канавку, имеющую дно, но они могут быть канавками, способными катить шарики 114 качения.
[0029] В этом варианте осуществления для тонкого ультразвукового двигателя 1 в направлении оси z, прижимающие пружины 111 расположены отдельно для окружения вибратора 100 вместо того, чтобы укладываться на верхней части вибратора 100. В этом варианте осуществления генерирование прижимного усилия посредством множества прижимных пружин 111 может миниатюризировать прижимные пружины 111. Кроме того, вибратор 100, предпочтительно, прижимается к фрикционному элементу 104 равномерно. В этом варианте осуществления, как иллюстрировано на фиг.5, прижимные пружины 111 расположены отдельно для окружения прижимной контактной части 100a вибратора 100, когда ультразвуковой двигатель 1 рассматривается сверху относительно плоскости X-Y.
[0030] Соединительный элемент (ролики 106а, 106b и пластинчатая пружина 107) 116 расположен между прижимными пружинами 111 (в положении, ближе к прижимной контактной части 100а, чем прижимные пружины 111) в направлении, параллельном оси х (направление движения вибратора 100) и в направлении, параллельном оси у. То есть, прижимные пружины 111 расположены снаружи соединительного элемента 116 вокруг вибратора 100 в направлениях, параллельных оси х и оси у. Направление, параллельное оси y, является направлением, ортогональным как направлению перемещения вибратора 100, так и направлению прижима прижимных пружин 111. Однако направление, параллельное оси y, не обязательно должно быть строго ортогональным вышеупомянутым направлениям и считается, по существу, ортогональным вышеупомянутым направлениям даже при сдвиге на несколько градусов.
[0031] Фиг.6 представляет собой вид в разрезе по линии D-D на фиг.5. В направлении, параллельном оси z, соединительные удерживающие части 110b элемента 110 передачи прижимающего усилия, которые соединяют и удерживают прижимные пружины 111, прижимающая часть 110a элемента 110 передачи прижимающего усилия, и соединительный элемент 116, расположены в одинаковом положение на пунктирной линии E на фигуре. Они не должны быть строго расположены в одном и том же положении и считаются расположенными, по существу, в одном и том же положении даже при смещении на несколько мм. В направлении, где вибратор 100 прижат (в направлении, показанном стрелкой А), предусматривающем эти элементы на пунктирной линии Е, не оказывают отрицательного влияния из-за повышения давления на ролики 106а, 106b и пластинчатую пружину 107, включенную в соединительный элемент 116. Таким образом, наклон в направлении перемещения вибратора 100 подавляется, благодаря чему может быть реализована стабильность рабочих характеристик.
[0032] При такой конструкции, ультразвуковой двигатель 1 согласно этому варианту осуществления может быть миниатюризирован, обеспечивая прижимной механизм, который прижимает вибратор к фрикционному элементу, и механизм, который выполнен с возможностью перемещения в направлении прижима без какого-либо люфта в направление движения.
[0033] В этом варианте осуществления, соединительный элемент 116 расположен между прижимными пружинами 111 в направлениях, параллельных оси x и оси y, но может быть расположен между прижимными пружинами 111 только в направлении, параллельном оси x, или может быть расположен между прижимными пружинами 111 только в направлении, параллельном оси у. С любой конструкцией может быть получен эффект миниатюризации.
[ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ]
[0034] Фиг.7 представляет собой увеличенный вид основных компонентов ультразвукового двигателя 1 согласно этому варианту осуществления. В этом варианте осуществления, одинаковые элементы, что и в первом варианте осуществления, обозначены теми же ссылочными позициями, а элементы, отличающиеся от элементов в первом варианте осуществления, соответственно, обозначены новыми ссылочными позициями.
[0035] Соединительный элемент 216 включает в себя ролик (элемент качения) 206 и пластинчатую пружину (поджимающий элемент) 207. Ролик 206 имеет длину в направлении, параллельном оси y (продольном направлении), длиннее, чем длина ролика 106a в первом варианте осуществления. Пластинчатая пружина 207, которая поджимает ролик 206, имеет длину в направлении, параллельном оси y (продольном направлении), длиннее, чем пластинчатая пружина 107 в первом варианте осуществления. Удлинение длины в продольном направлении пластинчатой пружины 207 может уменьшить уровень сложности конструкции пластинчатой пружины 207.
[0036] Кроме того, соединительный элемент 216, который включает в себя ролик 206 и пластинчатую пружину 207, контактирует с элементом 110 передачи прижимающего усилия в направлении, параллельном оси y (продольном направлении). То есть, удерживающий корпус 105 позиционирует соединительный элемент 116 в продольном направлении в первом варианте осуществления, но элемент 110 передачи прижимающего усилия позиционирует соединительный элемент 216 в продольном направлении в этом варианте осуществления.
[0037] В каждом варианте осуществления, ультразвуковой двигатель 1 имеет конструкцию, в которой вибратор 100 перемещается, а фрикционный элемент 104 не перемещается, но может иметь конструкцию, в которой вибратор 100 не перемещается, а фрикционный элемент 104 перемещается.
[0038] Кроме того, ультразвуковой двигатель 1 включает в себя фрикционный элемент 104 в качестве неподвижного элемента, который не перемещается, но может не включать в себя фрикционный элемент 104 в случае, когда вибратор 100 входит во фрикционный контакт с элементом, отличным, чем ультразвуковой двигатель 1 (например, часть удерживающей рамки объектива).
[0039] Хотя настоящее изобретение было описано со ссылкой к примеру вариантов осуществления, должно быть понятно, что изобретение не ограничено раскрытыми примерами вариантов осуществления. Объем следующей формулы изобретения будет соответствовать расширенному толкованию для того, чтобы охватывать все такие модификации, эквивалентные структуры и функции.
Изобретение относится к электротехнике. Технический результат состоит в уменьшении габаритов. Двигатель содержит вибратор, множество прижимных элементов, которые прижимают вибратор к контактирующему элементу для контакта с вибратором. Элемент передачи передает прижимающее усилие, которое прикладывается множеством прижимных элементов к вибратору. Первый удерживающий элемент удерживает вибратор. Второй удерживающий элемент удерживает элемент передачи. Соединительный элемент соединяет первый удерживающий элемент со вторым удерживающим элементом. Вибратор и контактирующий элемент движутся посредством вибраций, которые возникают в вибраторе. Вибратор выполнен с выступающей частью на поверхности, противоположной поверхности стороны элемента передачи. Прижимные элементы расположены отдельно для окружения выступающей части. Соединительный элемент расположен ближе к выступающей части, чем прижимные элементы. 4 н. и 13 з.п. ф-лы, 7 ил.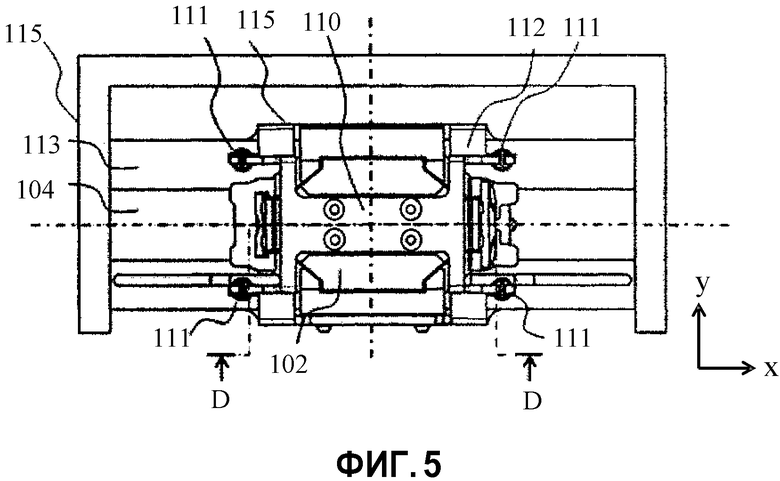
1. Двигатель, содержащий:
- вибратор;
- множество прижимных элементов, которые прижимают вибратор к контактирующему элементу в контакт с вибратором;
- элемент передачи, который передает прижимающее усилие, которое прикладывается множеством прижимных элементов, к вибратору;
- первый удерживающий элемент, который удерживает вибратор;
- второй удерживающий элемент, который удерживает элемент передачи; и
- соединительный элемент, который соединяет первый удерживающий элемент со вторым удерживающим элементом;
- при этом вибратор и контактирующий элемент имеют возможность перемещаться относительно посредством вибраций, которые возникают в вибраторе;
- при этом вибратор включает в себя выступающую часть, которая предусмотрена на поверхности, противоположной поверхности стороны элемента передачи;
- при этом множество прижимных элементов расположены отдельно для окружения выступающей части; и
- при этом соединительный элемент расположен в положении ближе к выступающей части, чем множество прижимных элементов.
2. Двигатель по п.1, в котором соединительный элемент расположен в положении ближе к выступающей части, чем множество прижимных элементов в направлении относительного перемещения вибратора и контактирующего элемента, и в направлении, ортогональном как к относительному направлению движения вибратора и контактирующего элемента, так и направлению прижима множества прижимных элементов.
3. Двигатель по п.1 или 2,
в котором элемент передачи включает в себя прижимную часть, которая передает прижимающее усилие к вибратору, и соединительные удерживающие элементы, которые, соответственно, соединяют и удерживают каждый из множества прижимных элементов, и
при этом соединительный элемент расположен в том же положении, что и прижимная часть и соединительные удерживающие элементы в направлении прижима множества прижимных элементов.
4. Двигатель по п.1 или 2, в котором передающий элемент устанавливает соединительный элемент в направлении, ортогональном как к относительному направлению перемещения вибратора и контактирующего элемента, так и направлению прижима множества прижимных элементов.
5. Двигатель по п.1 или 2, в котором соединительный элемент включает в себя элемент качения, выполненный с возможностью относительного перемещения первого и второго удерживающих элементов в направлении прижатия множества прижимных элементов, и поджимающий элемент, который поджимает первый и второй удерживающие элементы в направлении, параллельном направлению относительного перемещения вибратора и контактирующего элемента.
6. Двигатель по п.1 или 2, в котором вибратор включает в себя вибрационную пластину, которая контактирует с контактирующим элементом, и пьезоэлектрический элемент, который возбуждает ультразвуковые колебания при приложении напряжения.
7. Электронная аппаратура, содержащая двигатель по п.1 или 2.
8. Двигатель, который позволяет вибратору и контактирующему элементу, находящемуся в контакте с вибратором, перемещаться относительно посредством вибрирующего вибратора, при этом двигатель содержит:
- прижимной механизм, который включает в себя множество упругих элементов, и элемент передачи, передающий усилие посредством множества упругих элементов к вибратору, и который прижимает вибратор к контактирующему элементу;
- первый элемент, который удерживает вибратор;
- второй элемент, который удерживает прижимной механизм; и
- соединительный элемент, который соединяет первый удерживающий элемент со вторым удерживающим элементом;
- в котором соединительный элемент включает в себя элемент качения, который позволяет первому и второму элементам относительно перемещаться в направлении прижима прижимного механизма,
- в котором множество упругих элементов расположены вокруг вибратора в плоскости, ортогональной направлению прижима и
- в котором элемент качения расположен в положении ближе к вибратору, чем множество упругих элементов по меньшей мере в одном направлении направления относительного перемещения вибратора и контактирующего элемента, или направлении, ортогональном как к направлению прижима, так и направлению относительного перемещения.
9. Двигатель по п.8, в котором множество упругих элементов расположены для окружения вибратора в плоскости, ортогональной к направлению прижима.
10. Двигатель по п.8 или 9, в котором передающий элемент включает в себя выступающую часть, которая предусмотрена для перекрытия с вибратором в направлении прижима, и множество удерживающих элементов, которые продолжаются в направлении относительного перемещения по сравнению с выступающей частью, и которые, соответственно, удерживают каждый из множества упругих элементов.
11. Двигатель по п.10,
в котором множество упругих элементов представляют собой пружины растяжения,
в котором прижимной механизм включает в себя элементы, удерживающие пружину, которые, соответственно, удерживают первый конец каждой из пружин растяжения, и
в котором множество удерживающих элементов, соответственно, удерживают вторые концы каждой из пружин растяжения.
12. Двигатель по п.8 или 9,
в котором соединительный элемент включает в себя первый элемент качения и второй элемент качения в качестве элемента качения, и
в котором первый и второй элементы качения расположены для зажатия вибратора в направлении относительного перемещения.
13. Двигатель по п.12, в котором соединительный элемент включает в себя поджимающий элемент, который поджимает любой из первого или второго элемента качения в направлении относительного перемещения.
14. Двигатель по п.13, в котором любой из первого или второго элемента качения, который поджат посредством поджимающего элемента, является больше, чем другой, который не поджат посредством поджимающего элемента.
15. Двигатель по п.12, в котором первый и второй элементы качения расположены так, что каждая ось вращения является ортогональной как к направлению относительного перемещения, так и к направлению прижима.
16. Двигатель по п.8 или 9, в котором вибратор включает в себя вибрационную пластину, которая контактирует с контактирующим элементом, и пьезоэлектрический элемент, который возбуждает ультразвуковые колебания при приложении напряжения.
17. Электронная аппаратура, содержащая двигатель по п.8 или 9.
| US 2014293463 A1, 02.10.2014 | |||
| US 2014285066 A1, 25.09.2014 | |||
| US 2016103296 A1, 14.04.2016 | |||
| EP 2889997 A1, 01.07.2015 | |||
| УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2014 |
|
RU2596177C2 |

