Уровень техники
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к мотору вибрационного типа, применяемому к линзовому устройству, и т.д.
Описание предшествующего уровня техники
[0002] Выложенная японская патентная публикация № ("JP") 2015-65809 описывает ультразвуковой мотор, который включает в себя вибратор, имеющий пьезоэлектрический элемент и упругое тело, имеющее выступ, фрикционный элемент, сконфигурированный, чтобы двигаться относительно вибратора вследствие высокочастотной вибрации вибратора, и прижимной элемент, сконфигурированный, чтобы прижимать вибратор к фрикционному элементу. Ультразвуковой мотор, описанный в JP 2015-65809, дополнительно включает в себя направляющее средство, сконфигурированное, чтобы направлять относительное перемещение между вибратором и фрикционным элементом, в то же время получая силу противодействия для давления, приложенного к вибратору. Направляющее средство включает в себя направляющий элемент и направляющую канавку, и направляющий элемент зацепляется с направляющей канавкой и катится по направляющей канавке, тем самым, направляя относительное перемещение между вибратором и фрикционным элементом.
[0003] Однако, ультразвуковой мотор, описанный в JP 2015-65809, прикладывает давление прижимного элемента к вибратору внутри трех направляющих элементов во всем диапазоне привода. Таким образом, диапазон занятости направляющей канавки является длинным в направлении движения ультразвукового мотора. В результате, ультразвуковой мотор в направлении движения становится больше, и трудно реализовать компактный ультразвуковой мотор.
Сущность изобретения
[0004] Настоящее изобретение предоставляет компактный мотор вибрационного типа, линзовое устройство и электронное устройство.
[0005] Мотор вибрационного типа согласно одному аспекту настоящего изобретения включает в себя первый вибратор и второй вибратор, фрикционный элемент, сконфигурированный, чтобы касаться первого вибратора и второго вибратора, прижимной элемент, сконфигурированный, чтобы прижимать первый вибратор и второй вибратор к фрикционному элементу, и первый направляющий элемент и второй направляющий элемент, сконфигурированные, чтобы направлять относительное перемещение между первым и вторым вибраторами и фрикционным элементом. Первый вибратор и второй вибратор располагаются с интервалом в направлении, отличном от направления относительного перемещения между первым и вторым вибраторами и фрикционным элементом. Первый направляющий элемент и второй направляющий элемент предусматриваются между первым вибратором и вторым вибратором в направлении, отличном от направления относительного перемещения. Центр давления для давления, прикладываемого к первому вибратору и второму вибратору прижимным элементом, находится между первым направляющим элементом и вторым направляющим элементом.
[0006] Линзовое устройство согласно другому аспекту настоящего изобретения включает в себя вышеупомянутый мотор вибрационного типа и оптическую систему, приводимую в действие посредством мотора вибрационного типа. Электронное устройство согласно еще одному аспекту настоящего изобретения включает в себя вышеупомянутый мотор вибрационного типа и цель, приводимую в действие посредством мотора вибрационного типа.
[0007] Дополнительные признаки настоящего изобретения станут очевидны из последующего описания примерных вариантов осуществления со ссылкой на приложенные чертежи.
Краткое описание чертежей
[0008] Фиг. 1A-1C являются структурными видами линзового устройства, включающего в себя ультразвуковой мотор согласно первому варианту осуществления.
[0009] Фиг. 2A-2C являются пояснительными видами позиции направляющего элемента согласно первому варианту осуществления.
[0010] Фиг. 3A и 3B являются пояснительными видами угла и длины направляющей канавки согласно первому варианту осуществления.
[0011] Фиг. 4A-4C являются пояснительными видами соотношения между диапазоном движения и длиной направляющей канавки согласно первому варианту осуществления.
[0012] Фиг. 5A и 5B являются пояснительными видами направляющей канавки и направляющего элемента согласно разновидности первого варианта осуществления.
[0013] Фиг. 6A-6C являются пояснительными видами позиции направляющего элемента согласно второму варианту осуществления.
[0014] Фиг. 7A-7C являются пояснительными видами позиции направляющего элемента согласно второму варианту осуществления.
[0015] Фиг. 8A и 8B являются пояснительными видами позиции направляющего элемента согласно сравнительному примеру.
[0016] Фиг. 9A-9C являются пояснительными видами соотношения между диапазоном движения и длиной направляющей канавки согласно сравнительному примеру.
[0017] Фиг. 10 являются структурными видами устройства формирования изображения согласно третьему варианту осуществления.
Подробное описание вариантов осуществления
[0018] Обращаясь теперь к сопровождающим чертежам, будет предоставлено подробное описание вариантов осуществления согласно настоящему изобретению. На каждом чертеже одинаковые ссылочные номера предоставлены одинаковым элементам, и их дублирующее описание будет пропущено.
Первый вариант осуществления
[0019] Сейчас будет предоставлено описание первого варианта осуществления согласно настоящему изобретению. Эта спецификация задает X-направление как направление движения, в котором последующий вибратор и фрикционный элемент перемещаются относительно друг друга, и Z-направление - как направление прижатия для прижатия вибратора к фрикционному элементу. В Z-направлении, +Z-направление задается как направление от последующего вибратора к фрикционному элементу, а -Z-направление задается как направление от фрикционного элемента к вибратору. Y-направление задается как ортогональное направление, ортогональное каждому из X-направления и Z-направления.
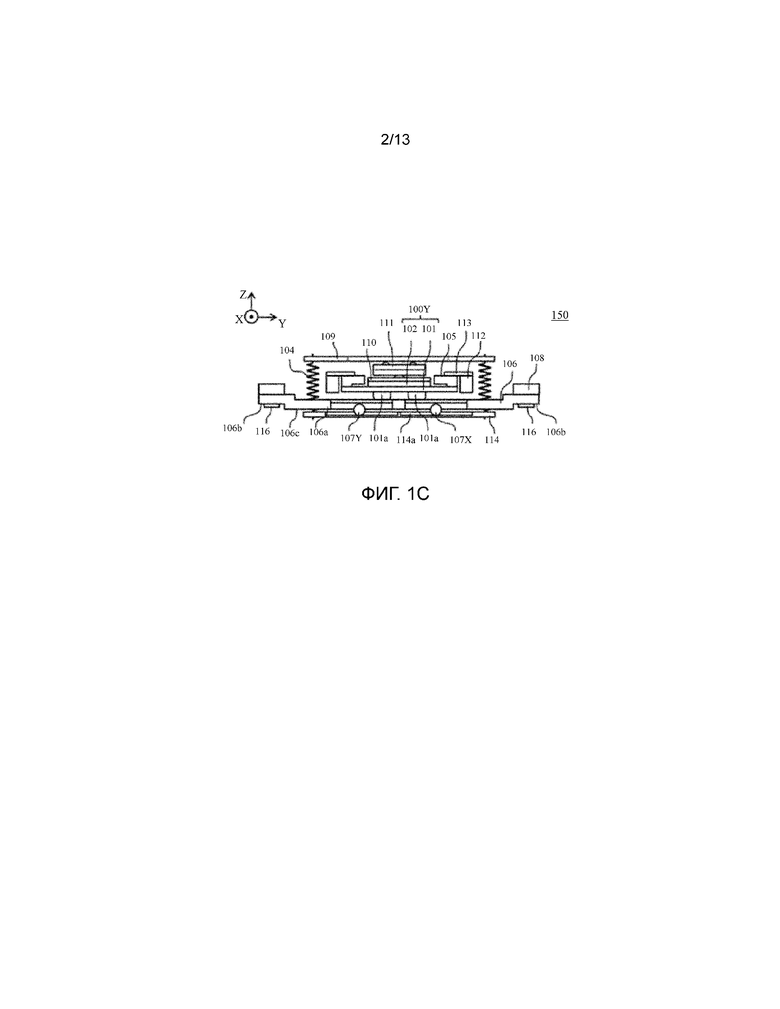
[0020] Обращаясь теперь к фиг. 1A-1C, будет предоставлено описание конфигурации ультразвукового мотора 150 в качестве мотора вибрационного типа согласно этому варианту осуществления и линзового устройства 160, включающего в себя ультразвуковой мотор 150. Ультразвуковой мотор 150 составляет часть блока привода линзы, который приводит в действие линзу 120 в линзовом устройстве 160. Фиг. 1A-1C иллюстрируют конфигурацию ультразвукового мотора 150 и линзовое устройство 160, включающее в себя ультразвуковой мотор 150. Фиг. 1A является видом спереди линзового устройства 160, фиг. 1B является видом спереди ультразвукового мотора 150, увеличивающим область 180 на фиг. 1A, а фиг. 1C является видом в разрезе, взятом по линии A-A на фиг. 1B.
[0021] Каждый из вибратора (первого вибратора) 100X и вибратора (второго вибратора) 100Y включает в себя вибрационную пластину 101, имеющую два выступа 101a, и пьезоэлектрический элемент 102, который вибрирует с высокой частотой. Пьезоэлектрический элемент 102 вибрирует с высокой частотой (ультразвуковым образом), когда неиллюстрированный источник питания подает напряжение. Пьезоэлектрический элемент 102 прикрепляется на вибрационную пластину 101 посредством приклеивания или другим средством, и высокочастотная вибрация пьезоэлектрического элемента 102 вызывает высокочастотные вибрации во всех соответствующих вибраторах 100X и 100Y. Каждый фрикционный элемент (первый фрикционный элемент) 103X и фрикционный элемент (второй фрикционный элемент) 103Y касается соответствующего одного из вибраторов 100X и 100Y и прикрепляется на элемент 108 основания посредством винта и т.д. Вибраторы 100X и 100Y прикрепляются на держатель 105 посредством приклеивания и другим средством. Держатель 105 прикрепляется на крепежный элемент 112 посредством приклеивания или другого средства через соединительную пластину 113. Однако, этот вариант осуществления не ограничивается креплением этих элементов винтами или клеями, но является применимым к способу крепления, использующему другое средство.
[0022] Прижимной элемент 104 прижимает каждый из вибраторов 100X и 100Y к соответствующему одному из фрикционных элементов 103X и 103Y и прижимает вибратор 100 через верхнюю прижимную пластину 109, нижнюю прижимную пластину 111 и упругую пластину 110. Прижимной элемент 104 касается верхней прижимной пластины 109 и пластины неподвижной стороны (неподвижной пластины) 114 в двух местах и обеспечивает такое давление, чтобы прижимать вибраторы 100X и 100Y к фрикционным элементам 103X и 103Y.
[0023] Согласно этому варианту осуществления ультразвуковой мотор 150 включает в себя два вибратора 100X и 100Y и два фрикционных элемента 103X и 103Y, контактирующих с ними. Вибраторы 100X и 100Y располагаются с интервалом друг от друга и размещаются параллельно в направлении (Y-направлении), ортогональном направлению давления (Z-направлению). Аналогично, фрикционные элементы 103X и 103Y также размещаются параллельно в направлении (Y-направлении), ортогональном направлению давления (Z-направлению). Ссылочные номера для двух параллельных пар, размещенных в Y-направлении в качестве одинаковых элементов, могут быть пропущены на каждом чертеже для упрощения видов.
[0024] Верхняя прижимная пластина 109 зацепляется с крепежным элементом 112 относительно зацепляющего фрагмента 112a крепежного элемента 112 в качестве центра вращения и касается выпуклого фрагмента на нижней прижимной пластине 111, чтобы передавать ему давление прижимного элемента 104. Нижняя прижимная пластина 111 располагается между вершинами вибраторов 100X и 100Y. Упругая пластина 110 располагается между нижней прижимной пластиной 111 и каждым из пьезоэлектрических элементов 102 в вибраторах 100X и 100Y. Упругая пластина 110 предохраняет прижимную часть нижней прижимной пластины 111 и пьезоэлектрические элементы 102 от непосредственного контакта друг с другом и защищает пьезоэлектрические элементы 102 от повреждения.
[0025] Пластина 114 неподвижной стороны прикрепляется на крепежном элементе 112 с помощью неиллюстрированных винтов или т.п. Пластина подвижной стороны (направляющая пластина) 106 прикрепляется на элементе 108 основания с помощью винта 116. Однако, способ крепления этих элементов не ограничивается этим примером. Поскольку фрикционные элементы 103X и 103Y также прикрепляются на элементе 108 основания, пластина 106 подвижной стороны объединяется с фрикционными элементами 103X и 103Y. Неподвижная поверхность 106b, закрепленная винтом 116 на пластине 106 подвижной стороны находится ниже к позиции, более близкой к элементу 108 основания, чем поверхность 106c, на которой предусматривается направляющая канавка подвижной стороны (первая канавка) 106a. Следовательно, когда пластина 106 подвижной стороны перемещается относительно пластины 114 неподвижной стороны, винт 116 не сталкивается с пластиной 114 неподвижной стороны, и пластина 106 подвижной стороны может быть уменьшена в направлении движения (X-направлении). Элемент 108 основания, на котором крепятся фрикционные элементы 103X и 103Y и пластина 106 подвижной стороны, располагается на стороне вибраторов 100X и 100Y (+Z-направление) фрикционных элементов 103X и 103Y и пластине 106 подвижной стороны. Элемент 108 основания, таким образом, предусматривается так, чтобы перекрывать вибратор 100 в направлении давления (Z-направлении), и может быть сделан меньше в направлении давления (Z-направлении), чем элемент 108 основания, предусмотренный на противоположной стороне вибраторов 100X и 100Y.
[0026] Пластина 114 неподвижной стороны имеет две V-образные направляющие канавки неподвижной стороны (вторые канавки) 114a. Пластина 106 подвижной стороны также имеет две V-образные направляющие канавки 106a подвижной стороны. Направляющая канавка 106a подвижной стороны на пластине 106 подвижной стороны и направляющая канавка 114a неподвижной стороны на пластине 114 неподвижной стороны находятся напротив друг друга. Сферический направляющий элемент (первый направляющий элемент) 107X и сферический направляющий элемент (второй направляющий элемент) 107Y направляют относительное перемещение между вибраторами 100X и 100Y и фрикционными элементами 103X и 103Y. Направляющие элементы 107X и 107Y зацепляются и удерживаются посредством направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны. Другими словами, пластина 106 подвижной стороны касается направляющих элементов 107X и 107Y. Эта конфигурация линейно направляет пластину 106 подвижной стороны и пластину 114 неподвижной стороны в X-направлении, когда сферические направляющие элементы 107X и 107Y прокатываются по V-образной направляющей канавке 106a подвижной стороны и направляющей канавке 114a неподвижной стороны.
[0027] Этот вариант осуществления устанавливает фрикционные элементы 103X и 103Y подвижными частями, а вибраторы 100X и 100Y неподвижными частями в относительных перемещениях между вибраторами 100X и 100Y и фрикционными элементами 103X и 103Y. Фрикционные элементы 103X и 103Y объединяются с пластиной 106 подвижной стороны, а вибратор 100 объединяется с пластиной 114 неподвижной стороны. Следовательно, вибраторы 100X и 100Y и фрикционные элементы 103X и 103Y линейно направляются посредством направляющих элементов 107X и 107Y в X-направлении в качестве последующего направления движения. Пластина 106 подвижной стороны предусматривается между двумя фрикционными элементами 103X и 103Y. Кроме того, пластина 106 подвижной стороны предусматривается так, чтобы перекрывать, по меньшей мере, часть каждого из фрикционных элементов 103X и 103Y, при просмотре с направления (Y-направления), ортогонального направлению давления (Z-направлению). Таким образом, конфигурация этого варианта осуществления может быть меньше конфигурации, в которой пластина 106 подвижной стороны и фрикционные элементы 103X и 103Y перекрывают друг друга в направлении давления (Z-направлении).
[0028] Элемент 108 основания соединяется с держателем 121 линзы вплотную в направлении движения (X-направлении). Держатель 121 линзы удерживает линзу 120, зацепляется с первым направляющим стержнем 122, и, таким образом, линейно направляется так, чтобы иметь возможность вращения относительно направления перемещения (X-направления). Первый направляющий стержень 122 прикрепляется на неиллюстрированный элемент, который обозначен "неподвижным" на фиг. 1A и 1B. Держатель 121 линзы зацепляется со вторым направляющим стержнем 123 в качестве ограничивающего вращение элемента держателя 121 линзы. Второй направляющий стержень 123 также прикрепляется на неиллюстрированный элемент, который обозначен "неподвижным" на фиг. 1A и 1B. Таким образом, держатель 121 линзы ограничивается от вращения и линейно направляется без вращения в направлении движения (X-направлении). Согласно этому варианту осуществления линзовое устройство 160 включает в себя ультразвуковой мотор 150, линзу 120, держатель 121 линзы, первый направляющий стержень 122 и второй направляющий стержень 123.
[0029] Как описано выше, пьезоэлектрический элемент 102 возбуждает высокочастотную вибрацию в вибраторах 100X и 100Y. Таким образом, эллиптическое перемещение создается на выступах 101a вибрационной пластины 101. Вибраторы 100X и 100Y прижимаются и приводятся в соприкосновение с фрикционными элементами 103X и 103Y посредством прижимного элемента 104. Таким образом, эллиптические перемещения вибраторов 100X и 100Y создают трения между вибраторами 100X и 100Y и фрикционными элементами 103X и 103Y, так что вибраторы 100X и 100Y и фрикционные элементы 103X и 103Y движутся относительно друг друга в направлении движения (X-направлении). Фрикционные элементы 103X и 103Y движутся в направлении движения (X-направлении) относительно вибраторов 100X и 100Y, объединенных в крепежный элемент 112. Таким образом, элемент 108 основания, на котором крепятся фрикционные элементы 103X и 103Y, держатель 121 линзы и линза 120 движутся в направлении движения (X-направлении). Другими словами, линза 120 может двигаться в X-направлении посредством относительных перемещений между вибраторами 100X и 100Y и фрикционных элементов 103X и 103Y, когда напряжение прикладывается к пьезоэлектрическому элементу 102.
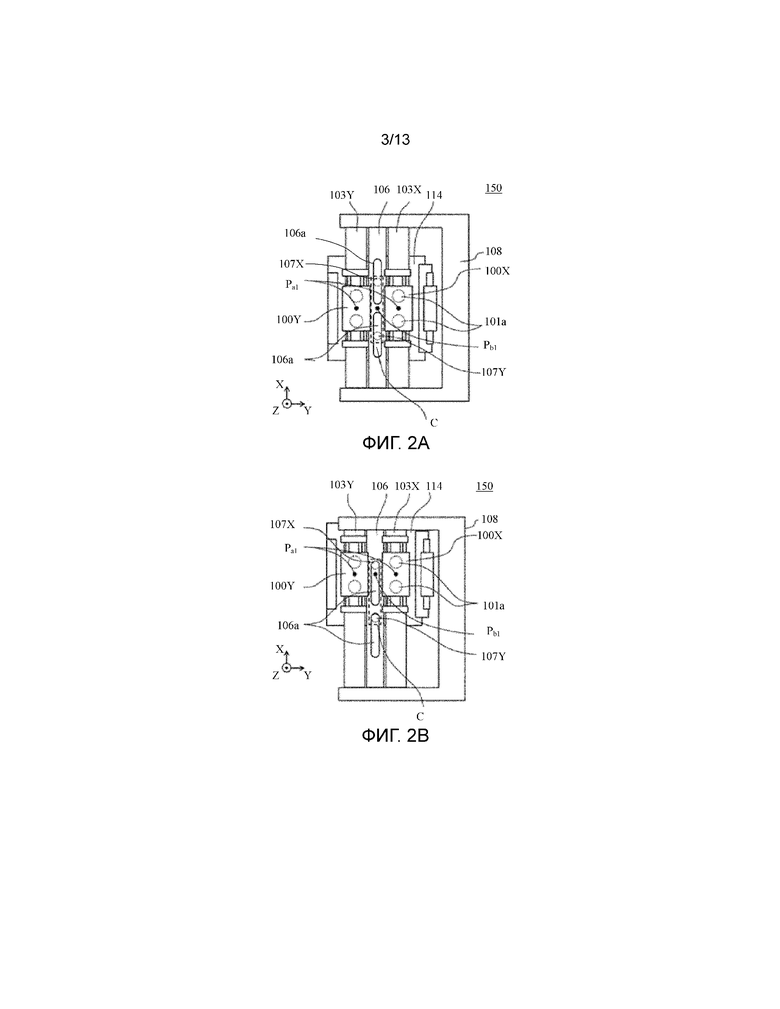
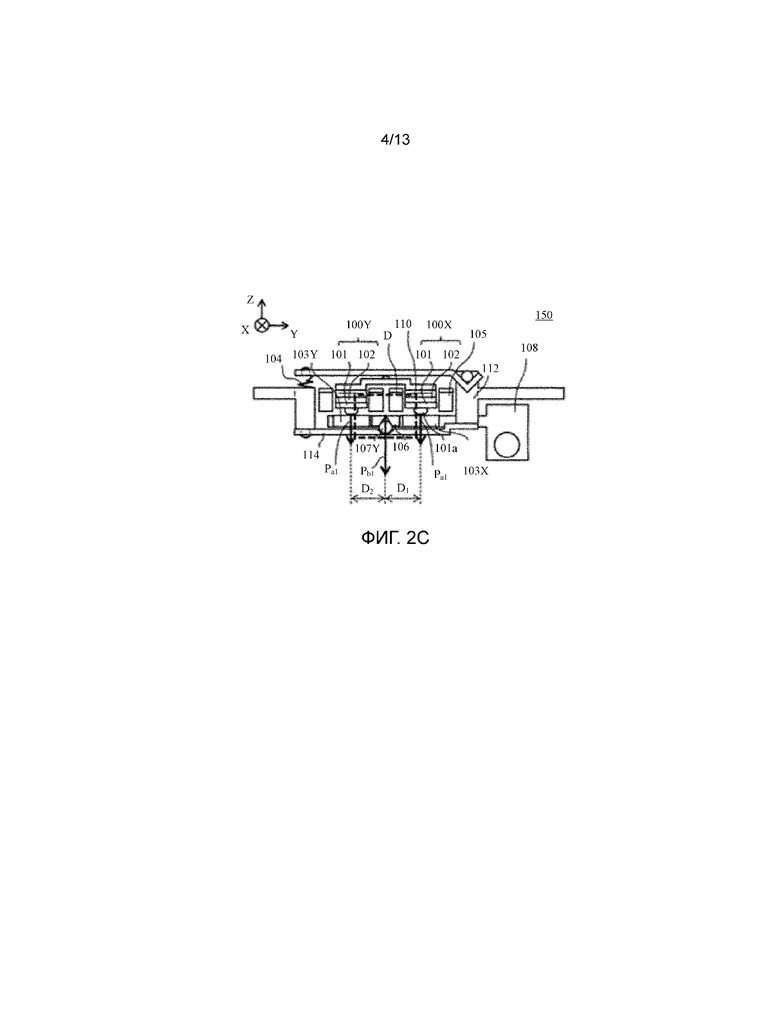
[0030] Обращаясь теперь к фиг. 2A-2C, будет дано описание позиций направляющих элементов 107X и 107Y. Фиг. 2A-2C являются пояснительными видами позиций направляющих элементов 107X и 107Y. Фиг. 2A и 2B являются видами сверху главных частей ультразвукового мотора 150, а фиг. 2C является видом спереди, соответствующим фиг. 1B. Фиг. 2A и 2B опускают прижимной элемент 104, удерживающий элемент 105, верхнюю прижимную пластину 109, упругую пластину 110, нижнюю прижимную пластину 111 и соединительную пластину 113. Фиг. 2A иллюстрирует подвижную часть, такую как фрикционные элементы 103X и 103Y, расположенную в центре в диапазоне движения, а фиг. 2B иллюстрирует подвижную часть, расположенную в диапазоне движения в конце в X-направлении.
[0031] Вибраторы 100X и 100Y прижимаются к фрикционным элементам 103X и 103Y посредством прижимного элемента 104, так что выступы 101a вибраторов 100X и 100Y сжимающимся образом касаются фрикционных элементов 103X и 103Y. Таким образом, давление (результирующее усилие) Pa1, прикладываемое к двум выступам 101a, прикладывается к каждому из фрикционных элементов 103X и 103Y. Ультразвуковой мотор 150 включает в себя два вибратора 100X и 100Y и два фрикционных элемента 103X и 103Y. Два вибратора 100X и 100Y размещаются в направлении (Y-направлении), приблизительно ортогональном направлению движения (X-направлению), в котором вибраторы 100X и 100Y и фрикционные элементы 103X и 103Y движутся относительно друг друга. Два фрикционных элемента 103X и 103Y также размещаются в направлении (Y-направлении), приблизительно ортогональном направлению движения (X-направлению). Давление Pa1 прикладывается к каждому из двух фрикционных элементов 103X и 103Y, и два фрикционных элемента 103X и 103Y и пластина 106 подвижной стороны объединяются с элементом 108 основания. Таким образом, результирующее усилие Pb1 двух приложенных давлений Pa1 прикладывается к фрикционным элементам 103X и 103Y, пластине 106 подвижной стороны и элементу 108 основания.
[0032] Направляющие элементы 107X и 107Y выравниваются с направлением движения (X-направлением) между вибраторами 100X и 100Y, и позиция (центр давления), к которой результирующее усилие Pb1 приложенных давлений Pa1 прикладывается, находится внутри диапазона C, который окружает направляющие элементы 107X и 107Y. Другими словами, результирующее усилие Pb1 давлений Pa1, приложенных к вибраторам 100X и 100Y посредством прижимного элемента 104, предоставляется внутри направляющих элементов 107X и 107Y в последующем диапазоне LS1 относительного движения между вибраторами 100X и 100Y и фрикционными элементами 103X и 103Y. Другими словами, результирующее усилие Pb1 предоставляется между направляющими элементами 107X и 107Y в X-направлении. Таким образом, давления Pa1, прикладываемые к вибраторам 100X и 100Y, могут препятствовать подъему пластины 106 подвижной стороны и стабильным образом прижимают ее.
[0033] Этот вариант осуществления задает расстояние D1 в ортогональном направлении (Y-направлении) между каждым из направляющих элементов 107X и 107Y и вибратором 100X меньше расстояния D2 в ортогональном направлении между каждым из направляющих элементов 107X и 107Y и вибратором 100Y (Y-направлении). Конфигурация согласно этому варианту осуществления предоставляет элемент 108 основания, прикрепленный к фрикционным элементам 103X и 103Y, с моментом относительно направления движения (X-направления) вследствие давления Pa1 прижимного элемента 104. Однако, расстояния D1 и D2 равны друг другу, и, таким образом, моменты вследствие давлений Pa1, приложенных к вибраторам 100X и 100Y, хорошо уравновешиваются, так что излишний момент не формируется в элементе 108 основания.
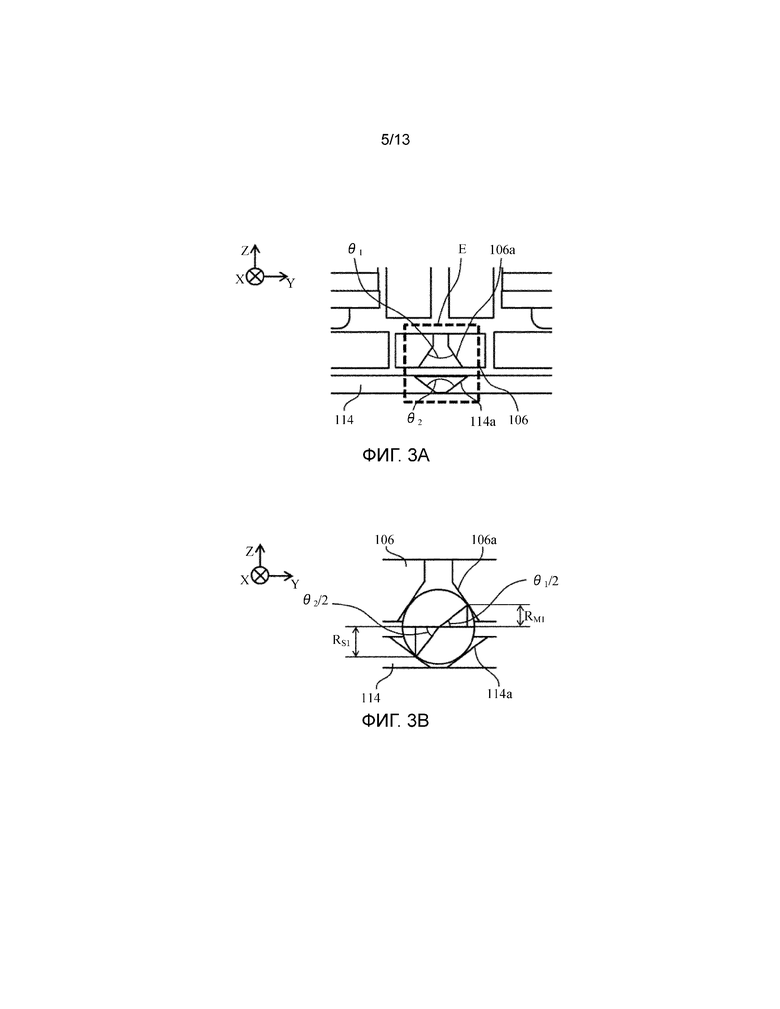
[0034] Обращаясь теперь к фиг. 3A и 3B, будет дано описание каждого угла и длины направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны. Фиг. 3A и 3B являются пояснительными видами углов и длин направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны. Фиг. 3A является укрупненным видом диапазона D на фиг. 2C, а фиг. 3B является укрупненным видом диапазона E на фиг. 3A. Фиг. 3A опускает направляющие элементы 107X и 107Y для того, чтобы иллюстрировать углы направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны. θ1 и θ2 являются V-образными углами в направляющей канавке 106a подвижной стороны и направляющей канавке 114a неподвижной стороны, соответственно. Как описано выше, когда пластина 106 подвижной стороны и пластина 114 неподвижной стороны движутся относительно друг друга, сферические направляющие элементы 107X и 107Y прокатываются по направляющей канавке 106a подвижной стороны и направляющей канавке 114a неподвижной стороны. В это время, пластина 106 подвижной стороны и пластина 114 неподвижной стороны движутся относительно направляющих элементов 107X и 107Y, соответственно, и величина относительного перемещения (величина качения) определяется на основе углов направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны.
[0035] Предположим, что RM1 является радиусом качения, когда направляющие элементы 107X и 107Y прокатываются по направляющей канавке 106a подвижной стороны, а RS1 является радиусом качения, когда направляющие элементы 107X и 107Y прокатываются по направляющей канавке 114a неподвижной стороны. Тогда интервалы качения пластины 106 подвижной стороны и пластины 114 неподвижной стороны, когда направляющие элементы 107X и 107Y прокатываются и выполняют один оборот, становятся 2πR M1 и 2πRS1. Предположим, что LS1 является диапазоном относительного перемещения ультразвукового мотора 150, а n является числом оборотов, на которые направляющие элементы 107X и 107Y прокатываются, когда элемент 108 основания перемещается в диапазоне LS1. Кроме того, LRM и LRS являются длинами направляющих элементов 107X и 107Y, прокатывающихся по направляющей канавке 106 подвижной стороны и направляющей канавке 114 неподвижной стороны, соответственно. Затем, диапазон LS1 вычисляется как LS1=LRM+LRS, интервалы LRM и LRS качения равны n×2πRM1 и n×2πRS1, и эти интервалы требуются для направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны. Радиусы R M1 и RS1 качения выражаются следующими формулами (1A) и (1B), соответственно, с помощью углов θ1 и θ2 V-образной канавки.
RM1=r × sin θ1 (1A)
RS1=r × sin θ2 (1B)
[0036] В выражениях (1A) и (1B) r является радиусом каждого из направляющих элементов 107X и 107Y. Таким образом, большие углы θ1 и θ2 V-образных канавок обеспечивают большие радиусы RM1 и RS1 качения и более длинную необходимую длину каждой направляющей канавки. Этот вариант осуществления задает угол θ1 направляющей канавки 106a подвижной стороны в пластине 106 подвижной стороны меньше угла θ2 направляющей канавки 114a неподвижной стороны в пластине 114 неподвижной стороны. Эта конфигурация может делать более короткой направляющую канавку 106a подвижной стороны и конфигурировать направляющую канавку 106a подвижной стороны без увеличения ее размера в направлении относительного перемещения пластины 106 подвижной стороны.
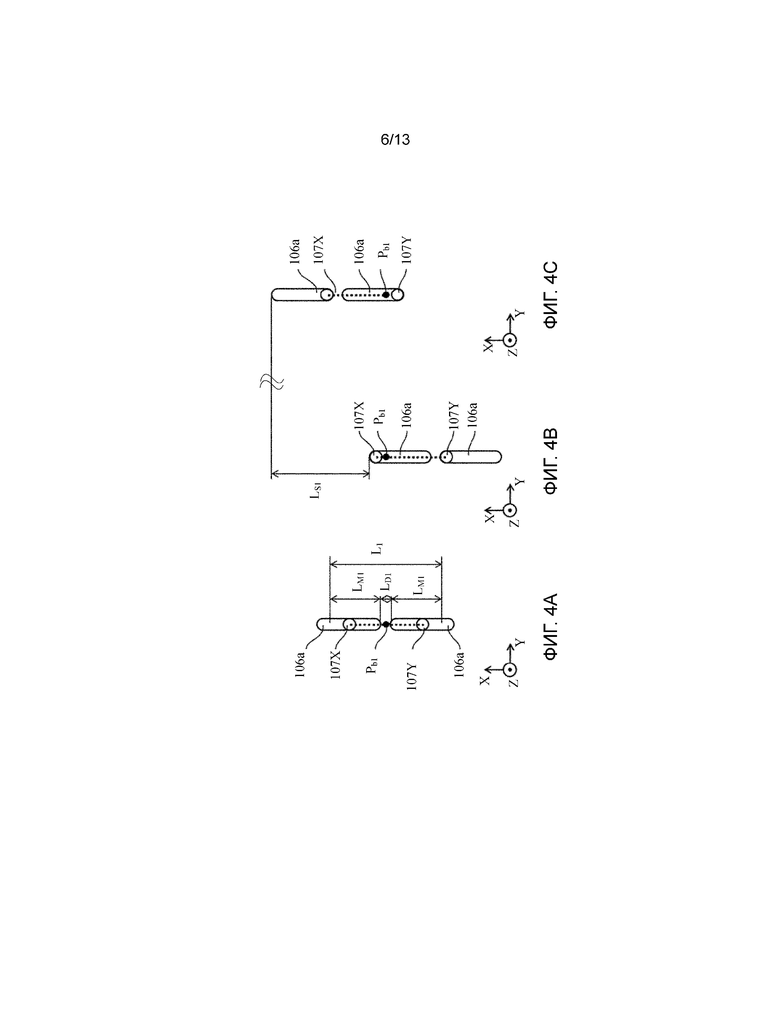
[0037] Обращаясь к фиг. 4A-4C, будет предоставлено описание соотношения между диапазоном LS1 и длиной направляющей канавки 106a подвижной стороны. Фиг. 4A-4C являются пояснительными видами соотношения между диапазоном LS1 и длиной направляющей канавки 106a подвижной стороны. Фиг. 4A-4C являются видами сверху и иллюстрируют только направляющую канавку 106a подвижной стороны, направляющие элементы 107X и 107Y и результирующее усилие (центр давления) Pb1 для упрощения видов. Фиг. 4A иллюстрирует подвижную часть, такую как фрикционные элементы 103X и 103Y, расположенные в центре в диапазоне LS1. Фиг. 4B и 4C иллюстрируют позиционное соотношение между направляющей канавкой 106a подвижной стороны, направляющими элементами 107X и 107Y и результирующим усилием (центром давления) Pb1, когда подвижная часть находится в конце в -X-направлении и конце в +X-направлении в диапазоне LS1.
[0038] Фрикционные элементы 103X и 103Y, элемент 108 основания и пластина 106 подвижной стороны движутся в X-направлении относительно неподвижного прижимного элемента 104, верхней прижимной пластины 109 и т.п. посредством относительного перемещения между вибраторами 100X и 100Y и фрикционными элементами 103X и 103Y. Таким образом, позиция результирующего усилия (центра давления) Pb1 поддерживается, несмотря на относительное перемещение между вибраторами 100X и 100Y и фрикционными элементами 103X и 103Y, и направляющая канавка 106a подвижной стороны движется в X-направлении. В ответ, направляющие элементы 107X и 107Y движутся в X-направлении, в то же время прокатываясь по направляющей канавке 106a подвижной стороны. В это время, как описано выше, результирующее усилие (центр давления) Pb1 располагается внутри двух направляющих элементов (прокатывающихся элементов) 107X и 107Y во всем диапазоне для диапазона LS1 и по пунктирной линии на каждой из фиг. 4A-4C. Теперь предположим, что L1 является диапазоном занятости направляющей канавки 106a подвижной стороны. Тогда, диапазон L1 занятости вычисляется с помощью длины LM1 двух направляющих канавок 106a подвижной стороны и расстояния LD1 между двумя направляющими канавками 106a подвижной стороны, как выражено в последующем выражении (2).
L1=2 × LM1+LD1 (2)
[0039] Длина LM1 определяется согласно размеру диапазона LS1, как описано выше. Расстояние LD1 является минимальным поддающимся механической обработке расстоянием, чтобы формировать, например, две формы канавок. Этот вариант осуществления предоставляет две направляющие канавки 106a подвижной стороны и две направляющие канавки 114a неподвижной стороны для двух направляющих элементов 107X и 107Y, но не ограничивается этим примером. Например, одна направляющая канавка 106a подвижной стороны и одна направляющая канавка 114a неподвижной стороны могут быть предусмотрены для двух направляющих элементов 107.
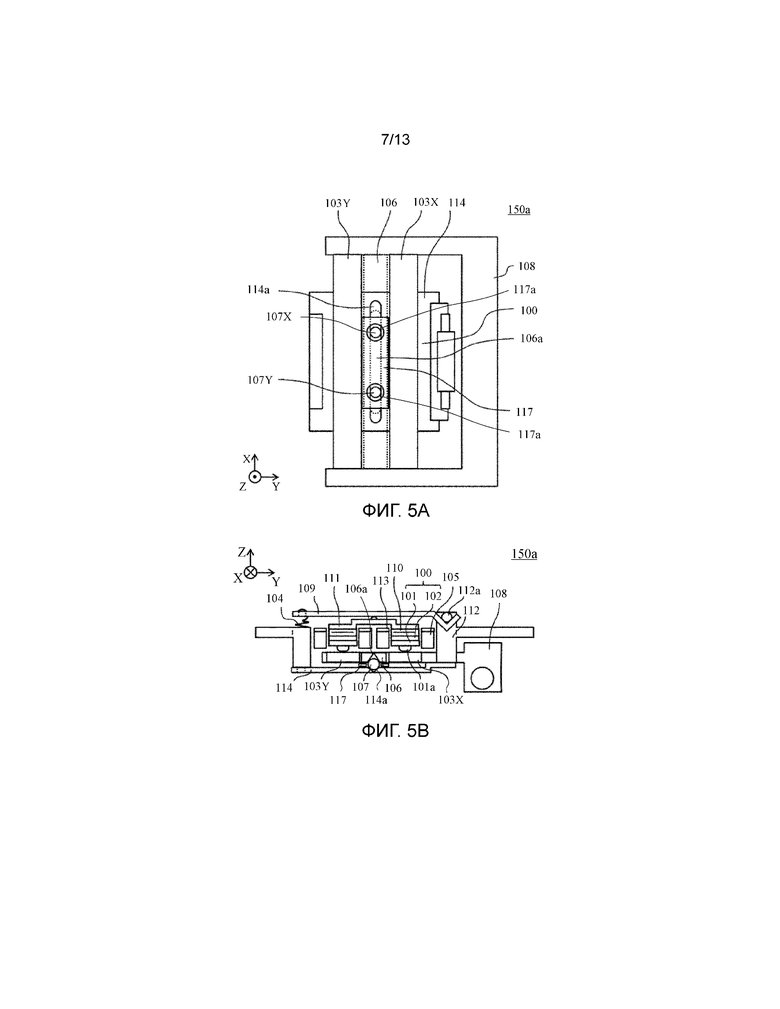
[0040] Обращаясь теперь к фиг. 5A и 5B, будет предоставлено описание ультразвукового мотора 150a согласно разновидности настоящего варианта осуществления. Фиг. 5A и 5B являются пояснительными видами направляющих элементов 107X и 107Y, направляющей канавки 106a подвижной стороны и направляющей канавки 114a неподвижной стороны в ультразвуковом моторе 150a согласно варианту. Фиг. 5A является видом сверху, соответствующим фиг. 2A, а фиг. 5B является передним видом, соответствующим фиг. 1B. Фиг. 5A исключает вибраторы 100X и 100Y и иллюстрирует пластину 106 подвижной стороны с помощью пунктирной линии, с тем, чтобы иллюстрировать пластину 114 неподвижной стороны и направляющую канавку 114a неподвижной стороны.
[0041] Ультразвуковой мотор 150a имеет одну подвижную направляющую канавку 106a и одну неподвижную направляющую канавку 114a. Направляющие элементы 107X и 107Y предусматриваются так, чтобы зацепляться с направляющей канавкой 106a подвижной стороны и направляющей канавкой 114a неподвижной стороны, соответственно. Удерживающая пластина 117 является элементом пластинчатой формы с отверстием, расположенным между направляющей канавкой 106a подвижной стороны и направляющей канавкой 114a неподвижной стороны. Направляющие элементы 107X и 107Y предусматриваются в фрагменте 117a отверстия в удерживающей пластине 117. Таким образом, конфигурация только с одной направляющей канавкой 106a подвижной стороны и только одной направляющей канавкой 114a неподвижной стороны может сохранять постоянное расстояние между направляющими элементами 107X и 107Y. Одна направляющая канавка 106a подвижной стороны может устранять интервал LD1 между двумя направляющими канавками 106a подвижной стороны и делать узким диапазон L1 занятости направляющей канавки 106a подвижной стороны.
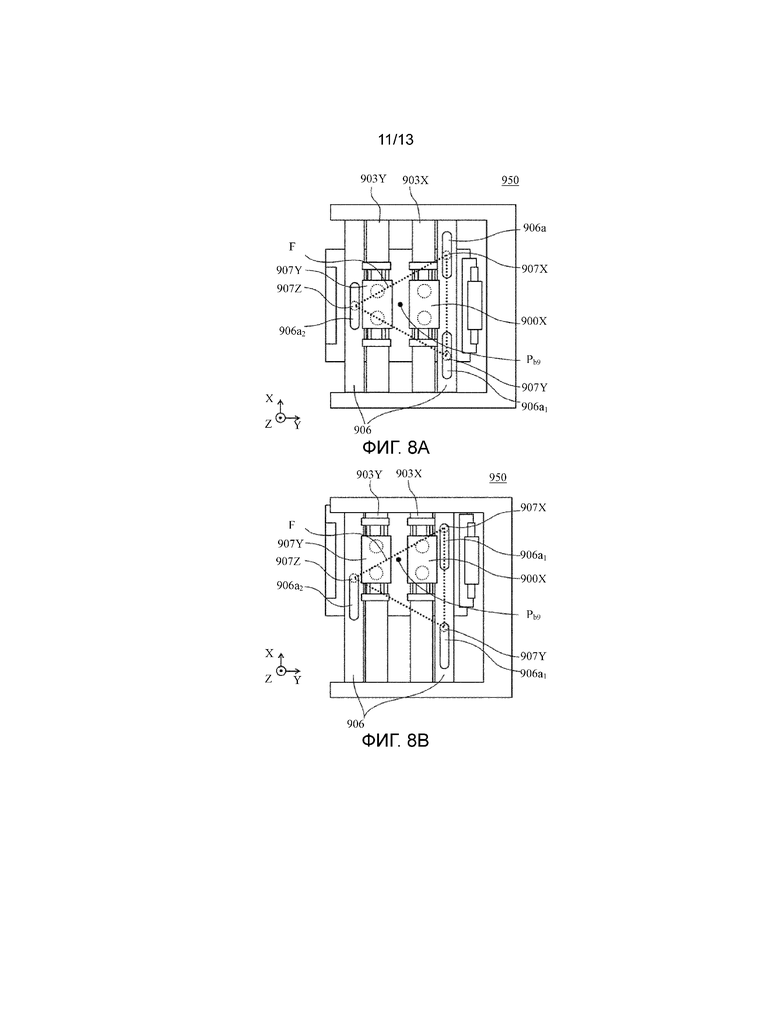
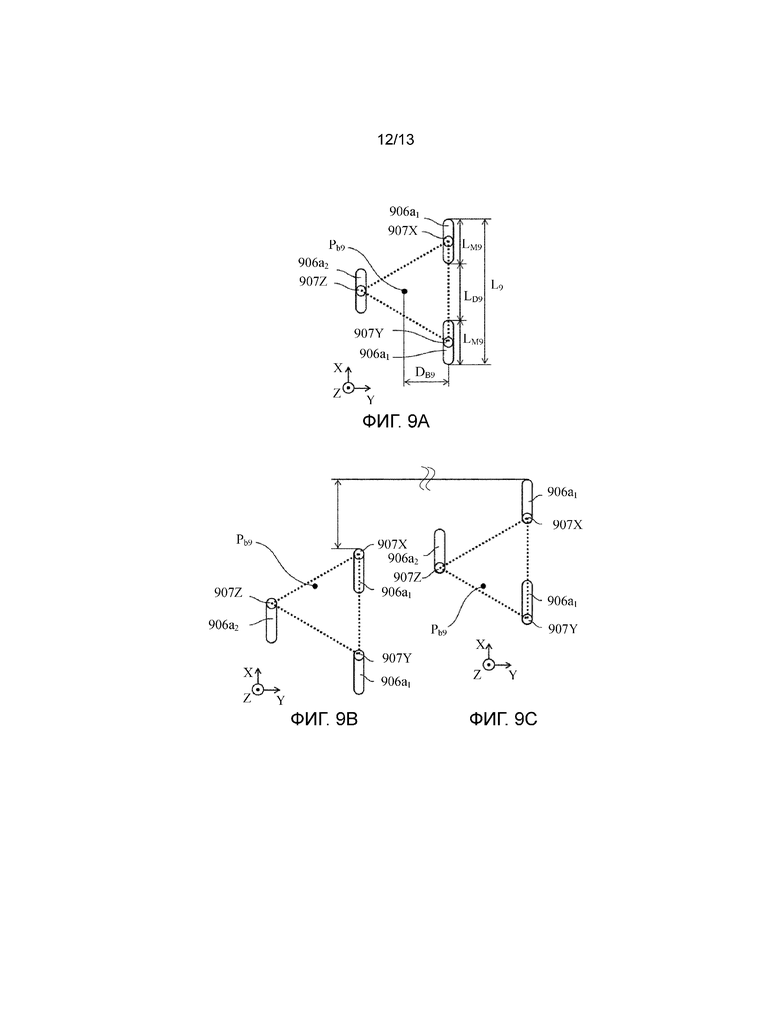
[0042] Обращаясь теперь к фиг. 8A, 8B и 9A-9C, будет предоставлено описание ультразвукового мотора 950 согласно сравнительному примеру. Фиг. 8A и 8B являются пояснительными видами позиций направляющих элементов 907X, 907Y и 907Z в ультразвуковом моторе 950. Фиг. 8A и 8B являются видами сверху, соответствующими фиг. 2A и 2B. Фиг. 9A-9С являются пояснительными схемами соотношения между диапазоном (диапазоном относительного перемещения) LS9 ультразвукового мотора 950 и длиной направляющей канавки 906a подвижной стороны. Фиг. 9A-9C являются видами сверху, соответствующими фиг. 4A-4C.
[0043] Ультразвуковой мотор 950 имеет три направляющих элемента 907X, 907Y и 907Z. Кроме того, ультразвуковой мотор 950 имеет две направляющие канавки 906a1 подвижной стороны, соответствующих направляющим элементам 907X и 907Y, и одну направляющую канавку 906a2 подвижной стороны, соответствующую направляющему элементу 907Z. Ультразвуковой мотор 950 имеет три направляющие канавки 914a неподвижной стороны, соответствующих двум направляющим канавкам 906a1 подвижной стороны и одной направляющей канавке 906a2 подвижной стороны.
[0044] Две направляющие канавки 906a1 подвижной стороны размещаются параллельно в направлении движения (X-направлении), и одна направляющая канавка 906a2 подвижной стороны предусматривается на противоположной стороне двух направляющих канавок 906a1 подвижной стороны относительно вибраторов 900X и 900Y. Для того, чтобы стабильным образом прижимать вибраторы 900X и 900Y к фрикционным элементам 903X и 903Y, направляющие канавки 906a1 и 906a2 подвижной стороны предусматриваются так, что результирующее усилие (центр давления) Pb9 находится внутри треугольного диапазона F, созданного соединением направляющих элементов 907X, 907Y и 907Z во всем диапазоне LS9. Этот сравнительный пример отделяет результирующее усилие (центр давления) Pb9 и две направляющие канавки 906a1 подвижной стороны расстоянием DB9 в ортогональном направлении (Y-направлении), и, таким образом, необходимо отделять две направляющие канавки 906a1 подвижной стороны расстоянием LD9. Следовательно, диапазон L9 занятости направляющей канавки 906a1 подвижной стороны (выраженный как L9=2 × LM9+LD9 с помощью длины LM9 двух направляющих канавок 906a1 подвижной стороны и расстояния LD9 между двумя направляющими канавками 906a1 подвижной стороны).
[0045] Теперь будет предоставлено описание результатов этого варианта осуществления. В сравнении со сравнительным примером, этот вариант осуществления предоставляет направляющую канавку 106a подвижной стороны между двумя вибраторами 100X и 100Y, и расстояние между направляющей канавкой 106a подвижной стороны и результирующим усилием (центром давления) Pb1 в ортогональном направлении (Y-направлении) становится нулевым. Следовательно, необходимо отделять их расстоянием LD1 между двумя направляющими канавками 906a подвижной стороны. Альтернативно, как описано выше, интервал LD1 может быть задан в ноль, когда две направляющие канавки 106a подвижной стороны уменьшаются до одной. Таким образом, диапазон L1 занятости направляющей канавки 106a подвижной стороны может быть сделан меньше диапазона сравнительного примера. Другими словами, этот вариант осуществления может уменьшать диапазон занятости направляющей канавки в направлении движения и реализует миниатюризацию в направлении движения.
[0046] Этот вариант осуществления обсуждает конфигурацию, в которой фрикционные элементы 103X и 103Y движутся в X-направлении относительно вибраторов 100X и 100Y, прикрепленных к крепежному элементу 112, но не ограничивается этим вариантом осуществления. Например, фрикционные элементы 103X и 103Y могут быть прикреплены на крепежный элемент 112, и вибраторы 100X и 100Y могут быть относительно подвижными в X-направлении. Широкий диапазон движения может уменьшать размер в направлении движения с помощью конфигурации, в которой вибраторы 100X и 100Y движутся. Этот вариант осуществления также обсуждает конфигурацию, в которой вибраторы 100X и 100Y соответственно прижимаются к двум фрикционным элементам 103X и 103Y, но вибраторы 100X и 100Y могут быть прижаты к единственному фрикционному элементу. Один фрикционный элемент может уменьшать стоимость.
Второй вариант осуществления
[0047] Далее следует описание второго варианта осуществления согласно настоящему изобретению. Первый вариант осуществления описывал конфигурацию, в которой два направляющих элемента располагаются между двумя вибраторами. С другой стороны, этот вариант осуществления отличается от первого варианта осуществления в том, что этот вариант осуществления предоставляет три направляющих элемента с двумя направляющими элементами, расположенными между двумя вибраторами. Описание элемента, общего с первым вариантом осуществления, будет опущено.
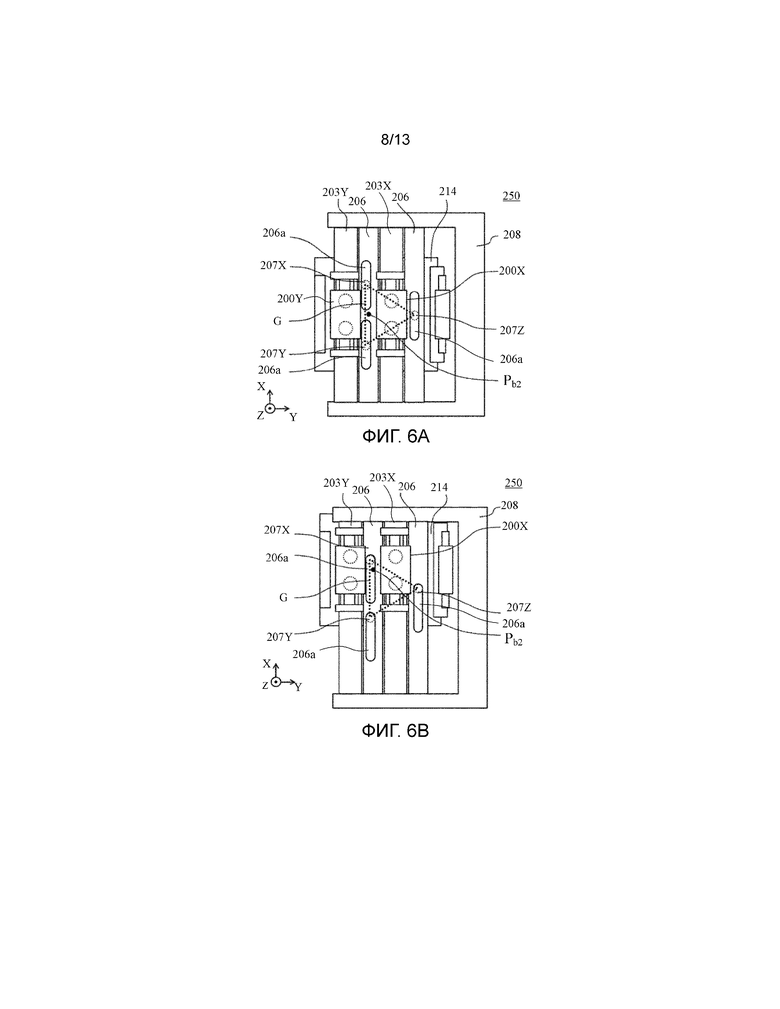
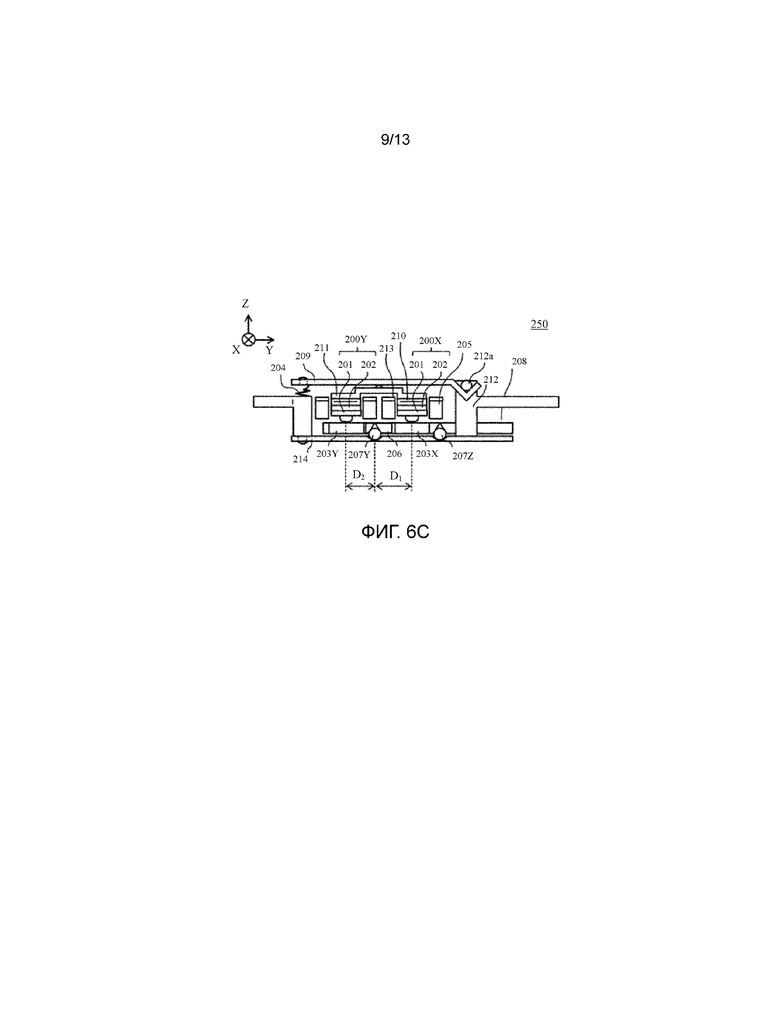
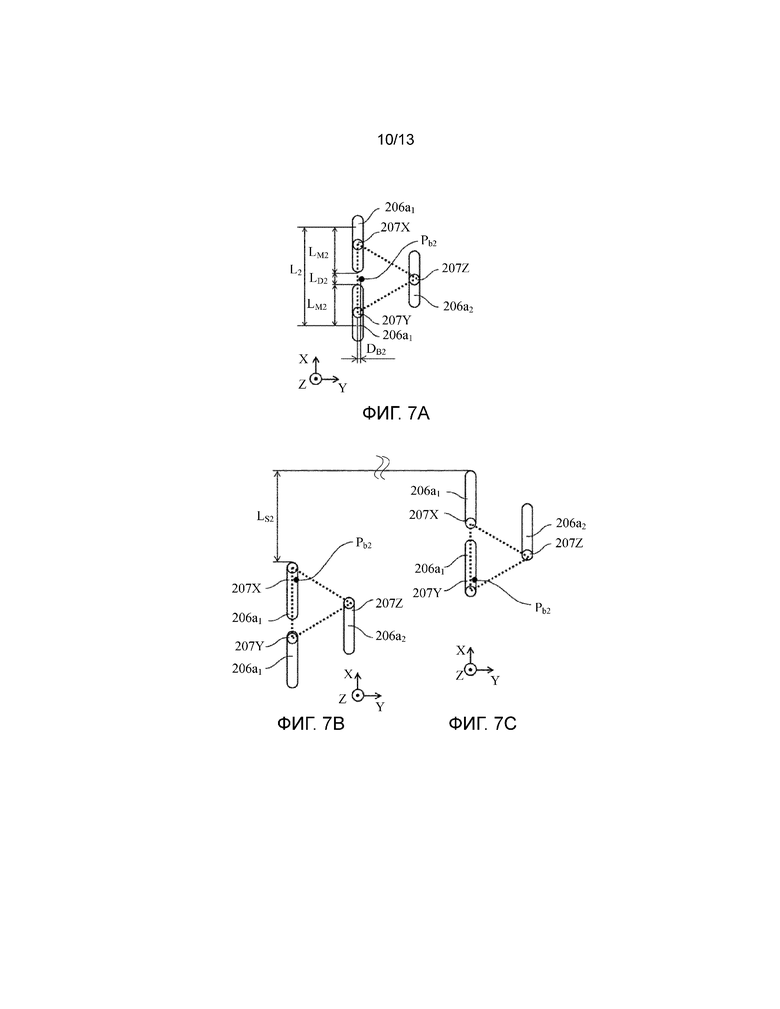
[0048] Фиг. 6A-6C являются пояснительными видами позиций направляющих элементов 207X, 207Y и 207Z согласно этому варианту осуществления. Фиг. 6A и 6B являются видами сверху ультразвукового мотора 250, фиг. 6C является его видом спереди, и эти чертежи соответствуют фиг. 2A-2C. Фиг. 7A-7С являются пояснительными видами соотношения между диапазоном (диапазоном относительного перемещения) LS2 ультразвукового мотора 250 и длиной направляющей канавки 906a подвижной стороны. Фиг. 7A-7C являются видами сверху, соответствующими фиг. 4A-4C.
[0049] Ультразвуковой мотор 250 согласно этому варианту осуществления имеет вибраторы 200X и 200Y, фрикционные элементы 203X и 203Y, пластину 206 подвижной стороны, пластину 214 неподвижной стороны и элемент 208 основания. Ультразвуковой мотор 250 имеет три направляющих элемента 207X, 207Y и 207Z, в то время как два направляющих элемента 207X и 207Y располагаются между вибраторами 200X и 200Y. Как иллюстрировано на фиг. 6C, расстояние D1 в Y-направлении между каждым из направляющих элементов 207X и 207Y и вибратором 200X больше расстояния D2 в Y-направлении между каждым из направляющих элементов 207X и 207Y и вибратором 200Y (D1>D2). Как иллюстрировано на фиг. 6A и 6B, направляющие элементы 207X, 207Y и 207Z размещаются так, что результирующее усилие (центр давления) Pb2 располагается внутри треугольной области G, созданной соединением направляющих элементов 207X, 207Y и 207Z, во всем диапазоне LS2 привода.
[0050] В сравнительном примере, иллюстрированном на фиг. 9A-9C, результирующее усилие (центр давления) Pb9 и две направляющие канавки 906a1 подвижной стороны отделяются расстоянием DB9 в ортогональном направлении (Y-направлении), и две направляющие канавки 906a1 подвижной стороны должны быть отделены расстоянием LD9. С другой стороны, этот вариант осуществления предоставляет направляющие канавки 207X и 207Y между вибраторами 200X и 200Y. Следовательно, расстояние DB2 между результирующим усилием (центром давления) Pb2 и каждой из двух направляющих канавок 206a1 подвижной стороны может быть сделано меньшим, и расстояние LD2 между двумя направляющими канавками 206a1 подвижной стороны может быть сделано меньшим. Следовательно, диапазон L2 занятости направляющей канавки 206a1 подвижной стороны может быть сделан более узким (который выражается как L2=2 × L M2+LD2, с помощью длины LM2 двух направляющих канавок 206a1 подвижной стороны и расстояния LD2 между двумя направляющими канавками 206a1 подвижной стороны). Другими словами, диапазон занятости направляющей канавки в направлении движения может быть сделан меньшим для миниатюризации в направлении движения. Этот вариант осуществления предоставляет три направляющих элемента 207X, 207Y и 207Z, принимает давление прижимающего элемента 204 и имеет неплохой результат устойчивой ориентации элемента 208 основания.
Третий вариант осуществления
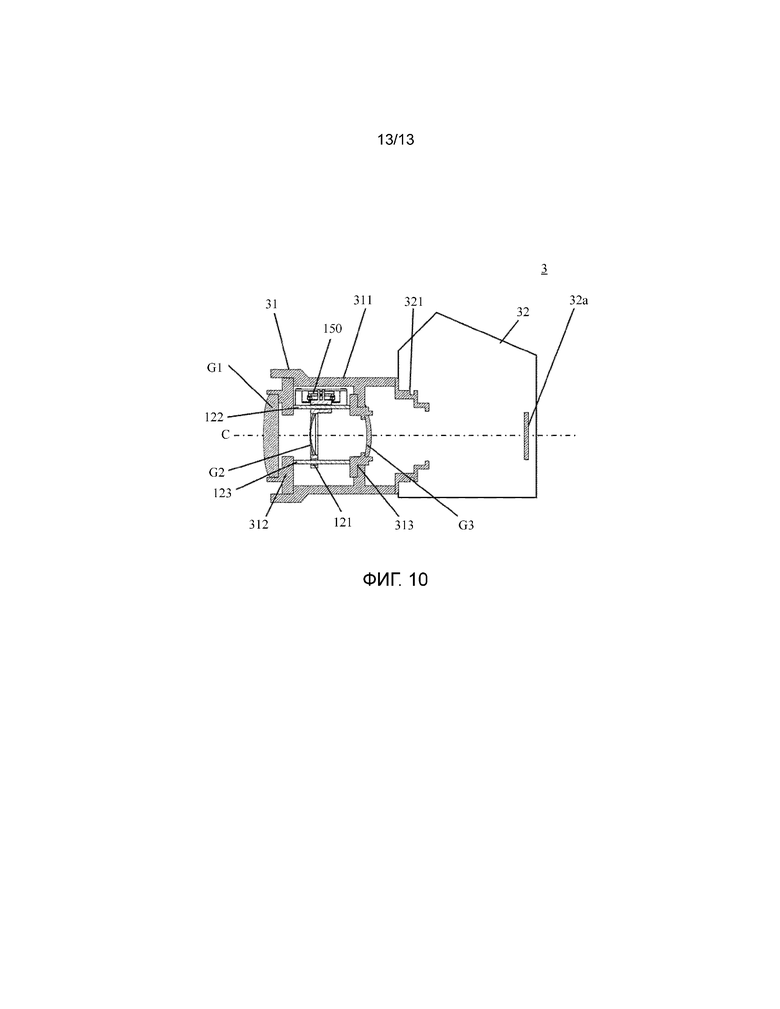
[0051] Обращаясь теперь к фиг. 10, будет предоставлено описание устройства формирования изображения согласно третьему варианту осуществления настоящего изобретения. Фиг. 10 иллюстрирует конфигурацию (вид в разрезе) устройства 3 формирования изображения. Устройство 3 формирования изображения включает в себя ультразвуковой мотор, такой как ультразвуковой мотор 150 каждого из вышеописанных вариантов осуществления. Устройство 3 формирования изображения включает в себя корпус 32 камеры (корпус устройства формирования изображения) и оправу 31 объектива (линзовое устройство), присоединяемую к и отсоединяемую от корпуса 32 камеры. Однако, этот вариант осуществления не ограничивается этим примером и является применимым к устройству формирования изображения, в котором корпус камеры и оправа объектива объединяются друг с другом.
[0052] Корпус 32 камеры включает в себя датчик 32a изображения. Датчик 32a изображения включает в себя CMOS-датчик или CCD-датчик, фотоэлектрическим образом преобразует оптическое изображение (изображение объекта), сформированное посредством оптической системы формирования изображения (линзы G1, G2 и G3) в оправе 31 объектива, и выводит данные изображения. Крепление 321 на корпусе 32 камеры имеет байонетный фрагмент, используемый для присоединения оправы 31 объектива к корпусу 32 камеры.
[0053] Оправа 31 объектива имеет неподвижную оправу 311, которая касается фланцевого фрагмента в креплении 321. Неподвижная оправа 311 и крепление 321 скрепляются посредством иллюстрированного винта. Передняя оправа 312 для удержания линзы G1 и задняя оправа 313 для удержания линзы G3 прикрепляются на неподвижную оправу 311. Оправа 31 объектива включает в себя удерживающую линзу рамку 314, которая удерживает линзу G2. Удерживающая линзу рамка 314 линейно удерживается с возможностью перемещения посредством первого направляющего стержня 122, удерживаемого посредством передней оправы 312 и задней оправы 313. Ультразвуковой мотор 150 прикрепляется на заднюю оправу 313 посредством неиллюстрированных винтов или т.п. Эта конфигурация передает приводящее усилие ультразвукового мотора 150 держателю 121 линзы, когда вибратор в ультразвуковом моторе 150 вибрирует. Затем, держатель 121 линзы линейно перемещается в направлении вдоль оптической оси C, в то же время направляясь посредством первого направляющего стержня 122.
[0054] Каждый вариант осуществления располагает с интервалом первый и второй вибраторы (вибраторы 100X и 100Y) в направлении (которое является предпочтительно направлением (Y-направлением), ортогональным направлению относительного перемещения), отличном от направления относительного перемещения (X-направления) между первым и вторым вибраторами и фрикционными элементами 103X и 103Y. Первый и второй направляющие элементы (направляющие элементы 107X и 107Y) предусматриваются между первым и вторым вибраторами в направлении, отличном от направления относительного перемещения (X-направления). Ультразвуковой мотор согласно каждому варианту осуществления может уменьшать диапазон занятости направляющей канавки и, таким образом, размер в направлении движения. Следовательно, каждый вариант осуществления может предусматривать компактный ультразвуковой мотор, линзовое устройство и устройство формирования изображения.
[0055] Третий вариант осуществления приводит в действие оптическую систему формирования изображения (линзу) посредством мотора вибрационного типа, но может приводить в действие компонент, отличный от оптической системы формирования изображения (линзы) в устройстве формирования изображения. Например, датчик изображения устанавливается в качестве цели, которая должна приводиться в действие, и вышеописанный мотор вибрационного типа может быть использован для привода датчика изображения в направлении, ортогональном оптической оси в оптической системе формирования изображения. Электронное устройство, к которому настоящее изобретение применимо, не ограничивается устройством формирования изображения, а вышеописанный мотор вибрационного типа может быть использован для привода компонента в качестве цели, которая должна быть приведена в действие в электронном устройстве, отличном от устройства формирования изображения.
[0056] В то время как настоящее изобретение было описано со ссылкой на примерные варианты осуществления, должно быть понятно, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем прилагаемой формулы изобретения должен соответствовать самой широкой интерпретации, так что он заключает в себе все такие модификации и эквивалентные структуры и функции.
[0057] Например, ультразвуковой мотор согласно каждому варианту осуществления не ограничивается линзовым устройством и является применимым к другому электронному устройству, которое требует быть небольшим и легковесным и должно иметь широкий диапазон скорости привода.

Изобретение относится к электротехнике. Технический результат состоит в уменьшении габаритных размеров. Мотор вибрационного типа включает в себя первый и второй вибраторы, фрикционный элемент, сконфигурированный, чтобы касаться первого и второго вибраторов, прижимной элемент, сконфигурированный, чтобы прижимать первый и второй вибраторы к фрикционному элементу, и первый и второй направляющие элементы, сконфигурированные, чтобы направлять относительное перемещение между первым и вторым вибраторами и фрикционным элементом. Первый и второй вибраторы располагаются с интервалом в направлении, отличном от направления относительного перемещения между первым и вторым вибраторами и фрикционным элементом. Первый направляющий элемент и второй направляющий элемент предусматриваются между первым вибратором и вторым вибратором в направлении, отличном от направления относительного перемещения. Центр давления для давления, прикладываемого к первому вибратору и второму вибратору прижимным элементом, находится между первым направляющим элементом и вторым направляющим элементом. 3 н. и 8 з.п. ф-лы, 10 ил.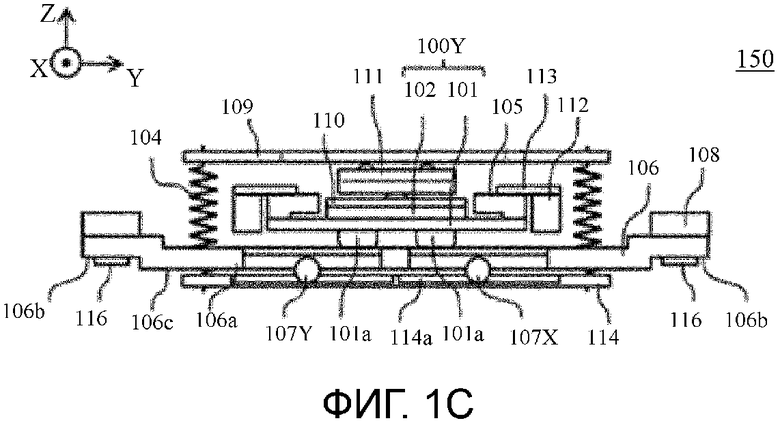
1. Мотор вибрационного типа, содержащий:
первый вибратор и второй вибратор;
фрикционный элемент, сконфигурированный, чтобы касаться первого вибратора и второго вибратора;
прижимной элемент, сконфигурированный, чтобы прижимать первый вибратор и второй вибратор к фрикционному элементу; и
первый направляющий элемент и второй направляющий элемент, сконфигурированные, чтобы направлять относительное перемещение между первым и вторым вибраторами и фрикционным элементом,
при этом первый вибратор и второй вибратор располагаются с интервалом в направлении, отличном от направления относительного перемещения между первым и вторым вибраторами и фрикционным элементом, и
при этом первый направляющий элемент и второй направляющий элемент предусматриваются между первым вибратором и вторым вибратором в направлении, отличном от направления относительного перемещения,
характеризующийся тем, что центр давления для давления, прикладываемого к первому вибратору и второму вибратору прижимным элементом, находится между первым направляющим элементом и вторым направляющим элементом.
2. Мотор вибрационного типа по п. 1, характеризующийся тем, что, в диапазоне относительного перемещения между первым и вторым вибраторами и фрикционным элементом, центр давления для давления, прикладываемого к первому и второму вибраторам прижимным элементом, находится между первым направляющим элементом и вторым направляющим элементом.
3. Мотор вибрационного типа по п. 1, характеризующийся тем, что первый вибратор и второй вибратор располагаются с интервалом друг от друга в направлении, ортогональном направлению относительного перемещения.
4. Мотор вибрационного типа по п. 1, характеризующийся тем, что первый направляющий элемент и второй направляющий элемент располагаются с интервалом друг от друга в направлении относительного перемещения.
5. Мотор вибрационного типа по п. 1, характеризующийся тем, что каждый из первого вибратора и второго вибратора включает в себя пьезоэлектрический элемент и вибрационную пластину, имеющую выступ, и фрикционный элемент касается выступа каждого из первого вибратора и второго вибратора.
6. Вибрационный мотор по п. 1, дополнительно содержащий направляющую пластину, сконфигурированную, чтобы касаться первого направляющего элемента и второго направляющего элемента, и объединенную с фрикционным элементом,
характеризующийся тем, что фрикционный элемент включает в себя первый фрикционный элемент, который касается первого вибратора, и второй фрикционный элемент, который касается второго вибратора, и
при этом направляющая пластина предусматривается между первым фрикционным элементом и вторым фрикционным элементом.
7. Мотор вибрационного типа по п. 6, характеризующийся тем, что, при просмотре с направления, ортогонального направлению, в котором прижимной элемент прижимает первый вибратор и второй вибратор, по меньшей мере, часть направляющей пластины перекрывает, по меньшей мере, часть первого фрикционного элемента и второго фрикционного элемента.
8. Мотор вибрационного типа по п. 6, дополнительно содержащий неподвижную пластину,
характеризующийся тем, что первый направляющий элемент и второй направляющий элемент удерживаются так, что первый направляющий элемент и второй направляющий элемент прокатываются между первой канавкой, сформированной в направляющей пластине, и второй канавкой, сформированной в неподвижной пластине,
при этом каждая из первой канавки и второй канавки имеет V-образную форму, и
при этом угол, сформированный первой канавкой, меньше угла, сформированного второй канавкой.
9. Мотор вибрационного типа по п. 1, характеризующийся тем, что расстояние между первым направляющим элементом и первым вибратором равно расстоянию между первым направляющим элементом и вторым вибратором в направлении, ортогональном направлению относительного перемещения, и расстояние между вторым направляющим элементом и первым вибратором равно расстоянию между вторым направляющим элементом и вторым вибратором.
10. Линзовое устройство, содержащее:
мотор вибрационного типа по любому из пп. 1-9; и
оптическую систему, приводимую в действие посредством мотора вибрационного типа.
11. Электронное устройство, содержащее:
мотор вибрационного типа по любому из пп. 1-9; и
цель, приводимую в действие посредством мотора вибрационного типа.
| US 2011031847 A1, 10.02.2011 | |||
| JP 2015065809 A, 09.04.2015 | |||
| JP 2001086777 A, 30.03.2001 | |||
| СПОСОБ КОММУТАЦИИ ОПТИЧЕСКИХ КАНАЛОВ И УСТРОЙСТВО КОММУТАЦИИ ОПТИЧЕСКИХ КАНАЛОВ | 1991 |
|
RU2024904C1 |

