Изобретение относится к устройству для забора и удаления отложившихся на дне водоема пластичных, илоподобных веществ, причем эти вещества должны отсасываться систематически и безвредно для окружающей среды.
Известно, что для поддержания водоемов в чистоте, для обеззараживания дна морей, рек и озер и для реактивации донной флоры и фауны необходимо откачивать или же всасывать покрывающие дно водоема загрязняющие вещества. Это может быть осуществлено, например, с помощью трубчатого шарнирного рукава с соответствующими всасывающими устройствами, для чего, правда, требуется относительно затратное оснащение на борту судна-носителя (DE 3630032 С2).
Устройство такого рода описано также в DE 19960361 А1, где описывается волочащаяся головка землесосного снаряда с грузовым трюмом для подачи водно-грунтовой смеси из водоема. Конструкция волочащейся головки зависит в первую очередь от вида подаваемого грунта. При этом волочащаяся головка, как правило, имеет сопла для воды под давлением, которые создают завихрения донного грунта, после чего он должен стать лучше всасываемым.
Похожее устройство описывается в DD 201617 В1, причем там плавучий понтон связан с подвижным всасывающе-намывочным устройством, которое с помощью полозьев и лебедки буксируется по грунту водоема. При этом на всасывающей поверхности установлено сито для предотвращения всасывания грубых составных частей.
Из DE 3923113 А1 известно другое устройство для удаления способного перекачиваться насосом грунта из водоема, причем там образован подводный аппарат в виде колокола с системой сопел, который имеет погружной насос, который окружен всасывающим раструбом. Насос через гибкий шланг и гибкую линию питания и управления находится в соединении с подводным плавучим телом.
Подобный аппарат описан в DE 102004017201 В4. Здесь всасывающее устройство тянется на гибком шланге, плывя по воде.
Из DE 2236448 С3 известно водное транспортное средство, которое является передвигающимся самостоятельно с помощью кормового привода и оснащено всасывающим хоботом, который имеет на своем впуске вращающуюся щетку.
Все подобные известные устройства для всасывания грунта из водоема имеют одинаковые недостатки:
- невозможно эффективное систематическое всасывание донного грунта, при котором дно водоема обрабатывается бережно.
- невозможно послойное всасывание.
- не существует самостоятельного шагающего механизма. Все устройства такого рода должны буксироваться землесосным снарядом или транспортным средством и не действуют самостоятельно.
- невозможен мониторинг всасывающего устройства, с помощью которого можно принимать меры для управления направляющим устройством.
В DE 2411140 А1 описано устройство для укладки ложащихся на грунт водоема труб, в котором имеется гусеничный ходовой механизм с черпающе-всасывающим устройством, однако при этом невозможно снимать и очищать грунт водоема систематически. В дополнение к этому гусеничный ходовой механизм создан не в управляемом выполнении, направление задается посредством уложенных труб.
В DE 3129228 А1 описан аппарат для подводного черпания упрочненных грунтов, как во внутренних водоемах, так и в прибрежной области. Самодвижущийся подводный всасывающий скрепер состоит по существу из гусеничного ходового механизма, отвала скрепера, всасывающего раструба и насоса с защитной бронировкой. Подача осуществляется с помощью гидравлики через гибкий шлангопровод на сопровождающее судно, с которого подводный гусеничный всасывающий скрепер обеспечивается энергией и управляется. Подводный гусеничный всасывающий скрепер имеет камеру плавучести, с помощью которой транспортное средство может быть выведено на поверхность.
Из WO 2012/158028 А1 известно тоже связанное с судном известное подводное всасывающее устройство, которое точно так же оснащено гусеничным ходовым механизмом. Во всасывающем устройстве имеется известный всасывающий хобот.
WO 2011/123 733 А1 относится к режущему землесосному снаряду с всасывающей трубой и режущей головкой, причем режущая головка содержит:
- непрерывное полотно для движения режущей головки по поверхности дна,
- по меньшей мере одну лазерную головку на участке для направления лазерного луча на обрабатываемую поверхность дна.
В US 6,922,922 В2 описывается водное транспортное средство-амфибия для эксплуатации как на воде, так и под водой, причем это транспортное средство имеет гусеничный ходовой механизм, вихреобразующий вал и устройство для всасывания составных частей грунта.
Недостатком описанных подводных гусеничных транспортных средств является то, что они не обладают ни собственным устройством управления, ни свободно качающимся и подстраивающимся к дну вихреобразующим устройством.
Из очистки бассейнов известны самодвижущиеся всасывающие головки для очистки дна, в которых тоже применяются гусеничные ходовые механизмы. Всасывающая головка такого рода описана в DE 3333633 С2.
Подобное устройство известно также из US 3,551,930.
Тем не менее, все очистители бассейна обладают следующими недостатками:
- они совершенно не пригодны для применения в открытых водоемах, так как, как правило, отсутствует непосредственное соединение с берегом или с поверхностью водоема, чтобы удалять ил (мешок).
- ходовые механизмы пригодны только для относительно гладкого дна.
- очистка дна водоема осуществляется не по системному, а лишь по случайному принципу.
- невозможна послойная выемка ила со дна водоема.
- они не являются управляемыми оператором.
- при изготовлении в более крупном размере они застревали бы в иле или же блокировали бы насосы.
В основе изобретения лежит задача, состоящая в том, чтобы разработать устройство, которое систематически собирает грунт водоема, бережно послойно всасывает и самостоятельно продвигается по нему даже при крупных препятствиях.
Согласно изобретению это достигнута посредством устройства по п.п. 1-20 формулы изобретения.
Решение согласно изобретению относится при этом к оформленному посредством комбинирования способов получения изображения (сонар для общего обзора, GPS (система глобального позиционирования - прим. пер.), а также стационарные камеры для непосредственного окружения) для координированной выемки ила, оптимизированному вручную с помощью камер плавучести и гусеничного привода на передвижение по илистым грунтовым поверхностям и грунтовым поверхностям разной плотности, управляемому всасывающему устройству, которое с помощью цилиндрической щетки рыхлит ил и отложения, посредством конкретного направления потока разжижает окружающей водой, собирает в специально задуманном всасывающем колоколе, при этом сначала с помощью решетчатой конструкции отделяет крупные тела, обводит установленную с возможностью качания цилиндрическую щетку над большими препятствиями, после объединения всасывающих каналов в варьируемом количестве измельчает с помощью соединенного последовательно режуще-измельчающего механизма небольшие куски, части растений, растительные волокна и посторонние предметы до размера менее 3 см, чтобы предотвратить закупорку и блокирование присоединенных насосов.
Насосы находятся рядом с гидравлическим и пневматическим агрегатами на блоке управления на управляемом с помощью внешнего борта плавучем теле, например на катамаране, который собирает отходящие от всасывающего модуля всасывающие шланги после насосов в пучок посредством плоского шланга, который для целей всплытия склеен или соединен иначе с другим, наполненным сжатым воздухом, шлангом, чтобы беспрепятственно выводить шлангопровод на поверхность водоема.
Насос(-ы) может(-гут) быть, конечно, расположен(-ы) также возле всасывающего колокола или в нем. Если он(-и) расположен(-ы) возле всасывающего колокола или в нем, то через трубопровод и плавучее тело или через непосредственное соединение он(-и) может(-гут) быть соединен(-ы) с намывочной площадкой или с отстойным бассейном или с транспортируемым резервуаром.
При прежних способах, например с помощью землесосного снаряда, позиционирование всасывающего блока осуществляется опосредованно через плавучий блок. То есть сначала он должен быть приведен в позицию, из которой затем можно управлять всасывающим блоком по предположению. Это предоставляет возможность лишь очень неточного управления. В решении согласно изобретению блок управления является пассивной частью. Всасывающий модуль маневрирует с помощью мониторинга через эхолот точно в обрабатываемой всасыванием части и при этом тянет за собой блок управления, но при необходимости он может позиционироваться также отдельно. Другие системы (всасывающие устройства для бассейна) используют в качестве робота хаотическую систему управления, для размеров прудов или озер она является непрактичной, так как было бы необходимо непрерывно прокладывать шланги, или же хаотическое управление не может рассматриваться, так как в известных случаях необходимо обходить определенные области, например защищенные участки с кувшинками. С другой стороны, другие всасывающие устройства необходимо неэффективным образом позиционировать вручную.
На примере всасывающего устройства для бассейна можно ясно видеть, что гусеница и весь всасывающий блок должны быть рассчитаны на труднопроходимый, илистый ареал. В рассматриваемой области применения всасывающее устройство для бассейна не могло бы продвигаться. Гусеница решения согласно изобретению имеет спереди и сзади скос, а также огромную поверхность прилегания, так что погружение или застревание всасывающего устройства исключено. Приведение в движение осуществляется через закрепленную с внутренней стороны гусеничной ленты зубчатой рейки, в зацепление с которой входит зубчатое колесо приводного блока.
Посредством мониторинга с применением эхолота и/или системы GPS и/или системы камер возможна, как описано, широкомасштабная выемка ила. Возможна комбинация всех трех систем. Тем самым в зависимости от желания клиента ил может быть извлечен на определенную толщину, так как он извлекается слоями толщиной около 30 см. Следовательно, благодаря такому образу действий не остается ландшафт в виде кратеров. Извлечение определенного количества может быть необходимо, если, например, толщина ила достигает нескольких метров, но из соображений экономии затрат, времени или из соображений, связанных утилизацией, он не может быть извлечен полностью, однако извлечение верхнего слоя обещает смягчить проблемы, которые были вызваны илом.
Вследствие применения установленной с возможностью качания цилиндрической щетки углубление первоначального профиля дна исключено. Ракушки больше одного сантиметра отделяются с помощью решетки и не разрушаются гибкой щетиной. В отличие от весящих тонны землесосных снарядов, в течение подготовительного времени не следует ожидать нарушения экологии береговой линии, так как вес устройства всасывания ила ограничен до величины менее 200 кг, и он посредством гусениц распределен по дну.
В решении согласно изобретению насос рассчитан на экстремально загрязненную воду.
Слишком большие и длинноволокнистые посторонние предметы измельчаются предшествующим режущим механизмом. Чересчур большие посторонние предметы с самого начала отделяются, в свою очередь, предшествующим режущему механизму решетчатым сбрасывателем.
Перед гусеничным ходовым механизмом дополнительно могут быть расположены один или несколько косильных механизмов. Они могут быть необходимы в том случае, если на дне водоема находится очень много растений или их остатков или других загрязнений или если косьба растений является частью задания.
В противоположность известным устройствам всасывания для бассейнов цилиндрическая щетка решения согласно изобретению установлена с возможностью качания, благодаря чему она может приспособиться даже к беспорядочно сформованному профилю дна. Вследствие этого повреждение всасывающего модуля исключено. Таким образом, всасывающий модуль не застревает и не зависает.
Посредством воздействующего частично вокруг цилиндрической щетки и на ее щетину решетчатого сбрасывателя обеспечивается, чтобы во время эксплуатации он (сбрасыватель) не закупоривался.
Предотвращение закупорок, а также регулировка потока достигнута также посредством особого расположения плиты или же направляющего щитка во всасывающем колоколе, причем на конце плиты или же направляющего щитка закреплен решетчатый сбрасыватель, который, как уже описано, частично воздействует вокруг щетины или же на щетину цилиндрической щетки.
Список применяемых ссылочных обозначений
1 опора
2 поворотный рычаг
3 уплотнительная плита
4 всасывающий колокол
5 режущий механизм
6 цилиндрическая щетка
7 решетка/сбрасыватель
8 двигатель/привод
9 всасывающий патрубок фланец
10 гусеница
11 всасывающий модуль
12 блок управления
13 насос
14 всасывающий шланг
15 гидравлический трубопровод
16 гидравлический агрегат
17 устройство управления гидравликой
18 плавучее тело
19 компрессор
20 электрогенераторный агрегат
21 резервуар для сбора грязной воды
22 сборный напорный шланг
23 направляющие ролики
24 шланг в качестве камеры плавучести
25 поверхность воды
26 датчик эхолота
27 конус передачи
28 ил
29 обработанный всасыванием ил
30 кабель/вытягиваемая леска
Пример осуществления
В последующем, изобретение разъясняется подробнее с помощью примера осуществления.
При этом показано на:
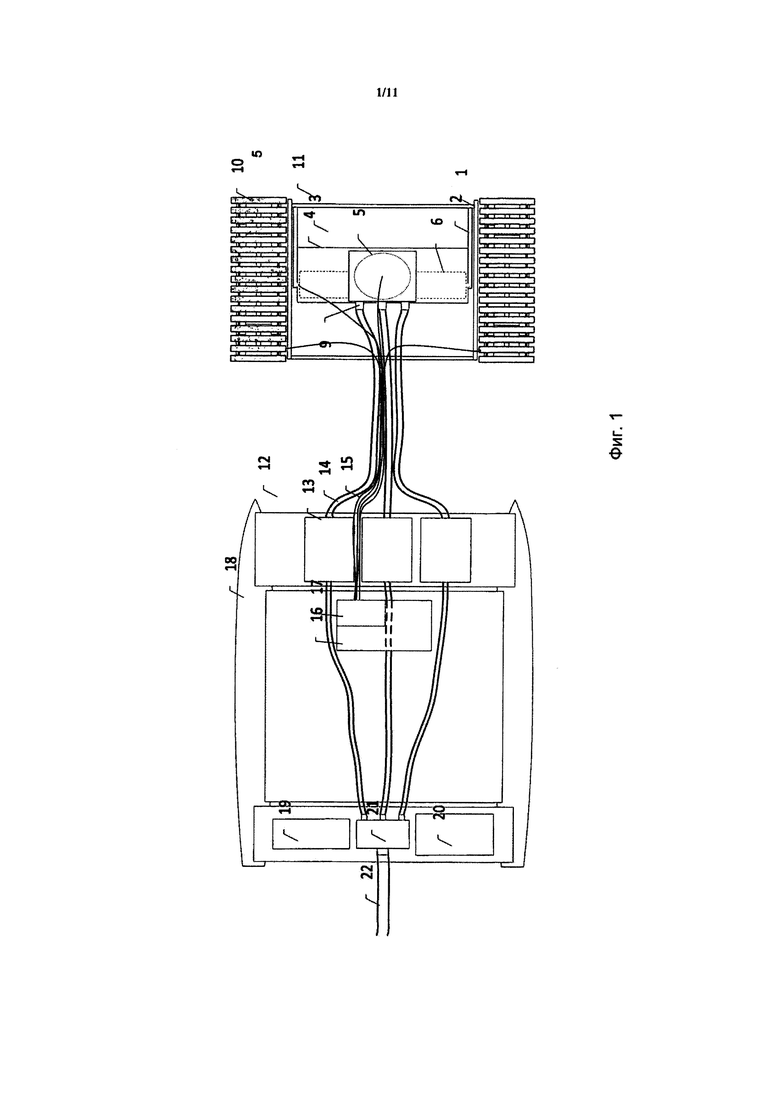
Фиг. 1 все устройство при его применении в виде сверху,
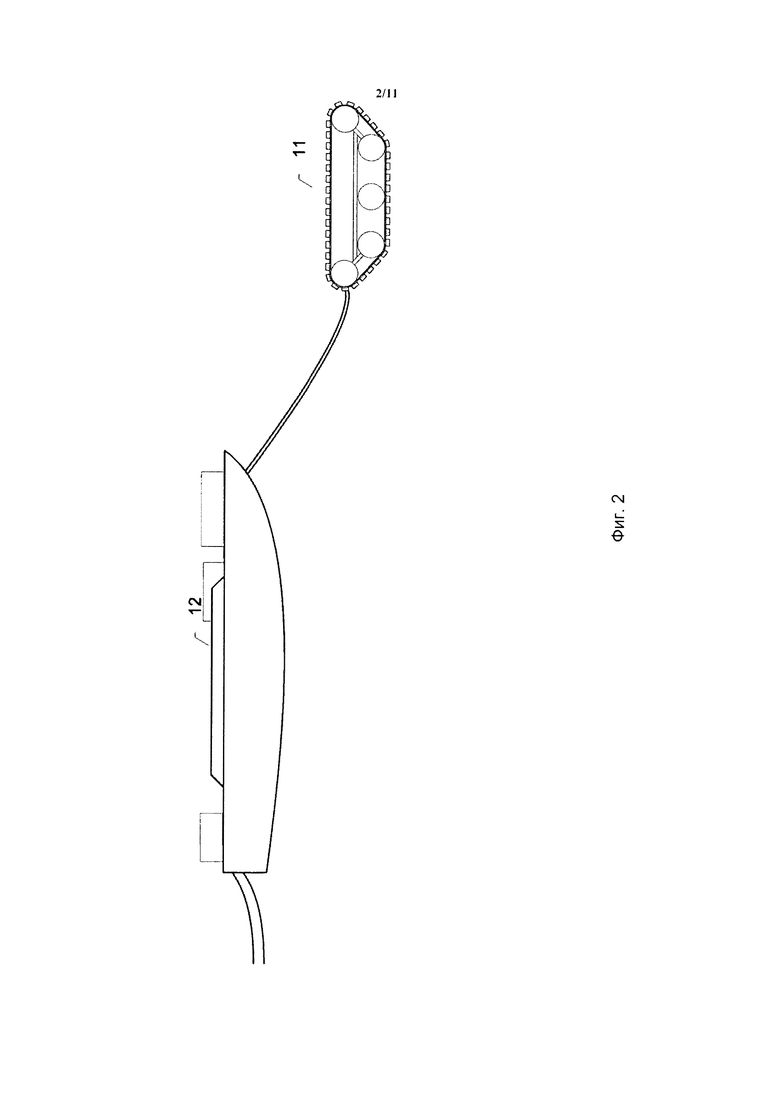
Фиг. 2 все устройство при его применении в виде сбоку,
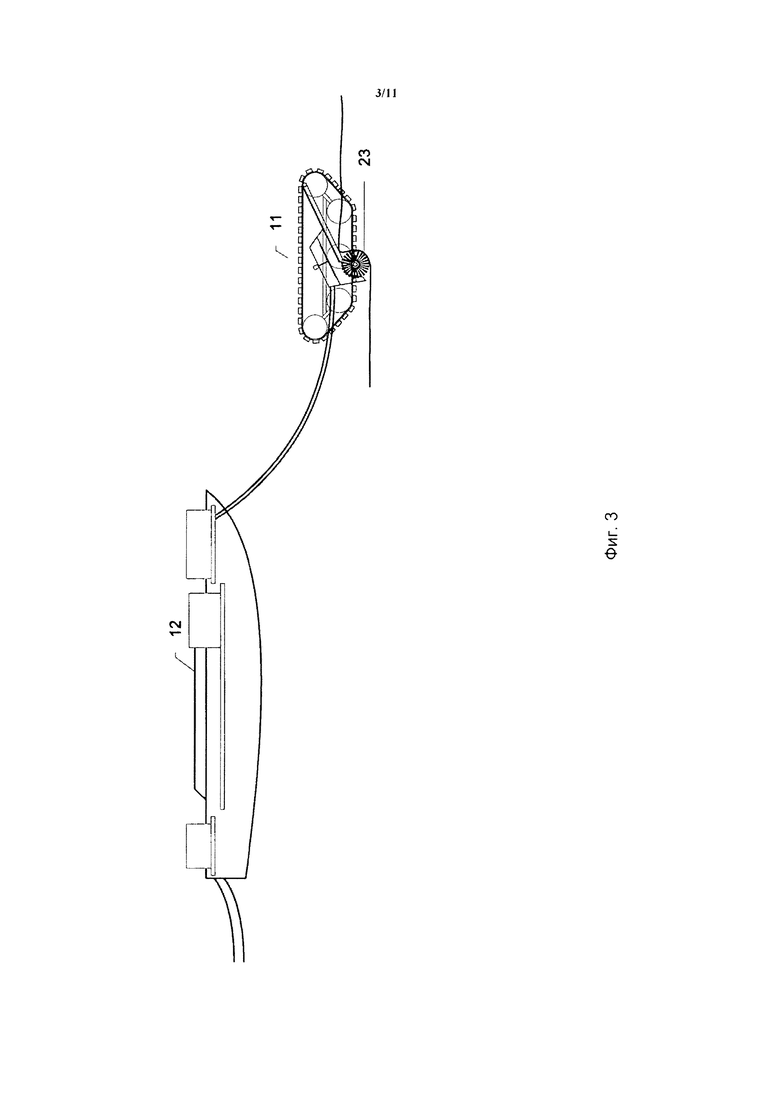
Фиг. 3 все устройство при его применении в разрезе,
Фиг. 4 всасывающий модуль с гусеничным ходовым механизмом, поворотными рычагами и цилиндрической щеткой в виде сверху,
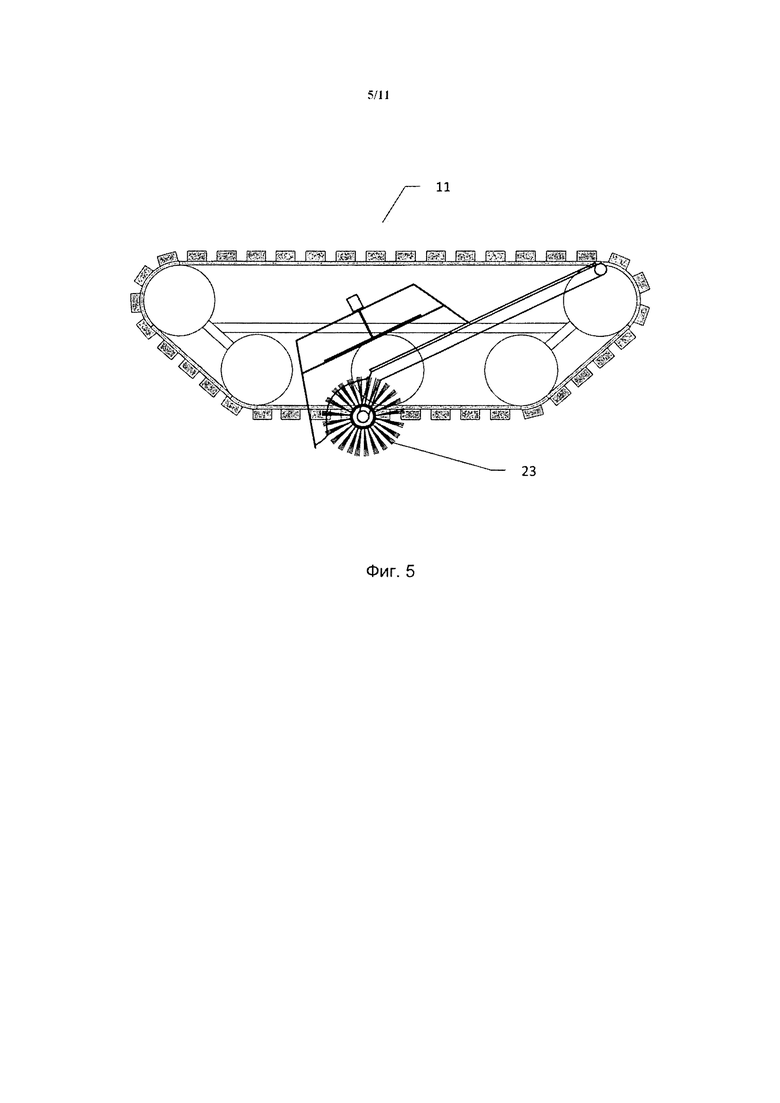
Фиг. 5 всасывающий модуль в разрезе в виде сбоку,
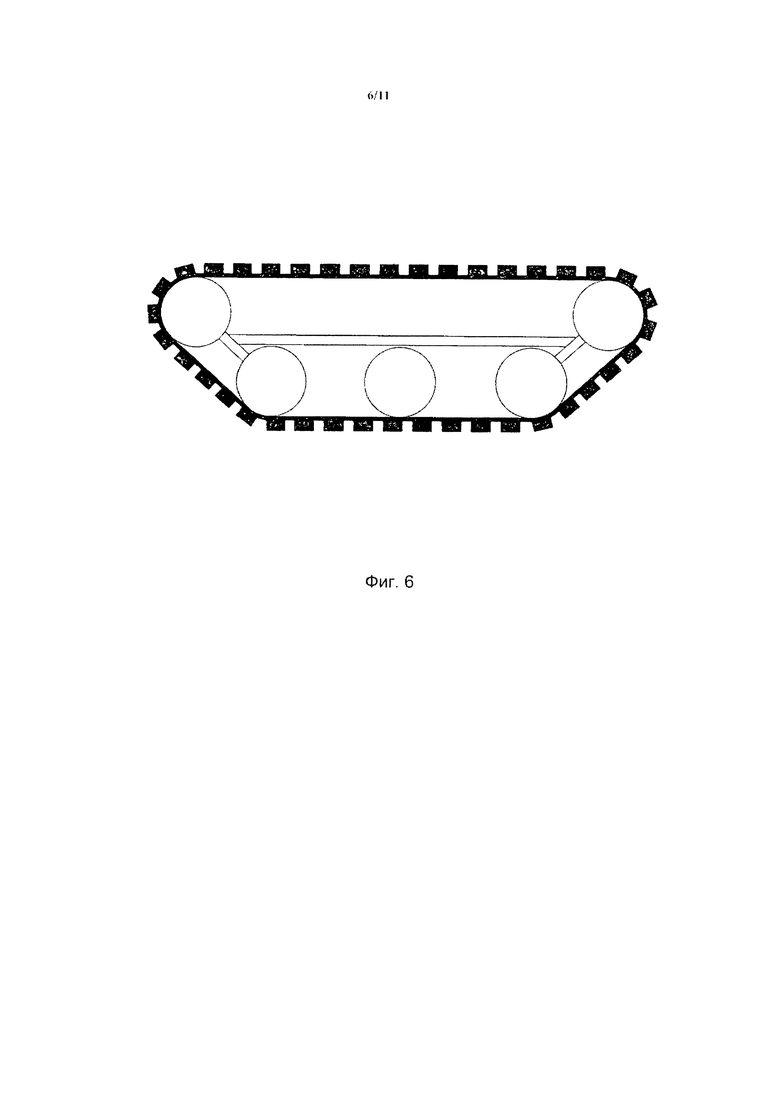
Фиг. 6 гусеничное транспортное средство в разрезе,
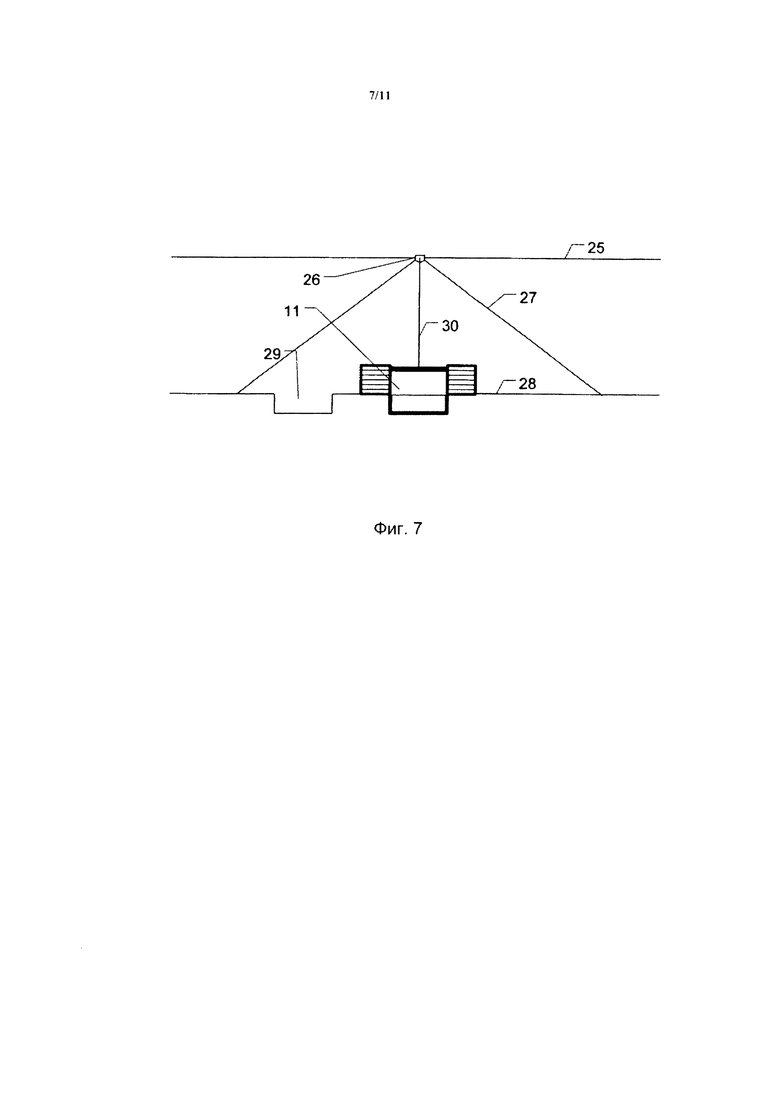
Фиг. 7 всасывающий модуль с датчиком эхолота на грунте водоема,
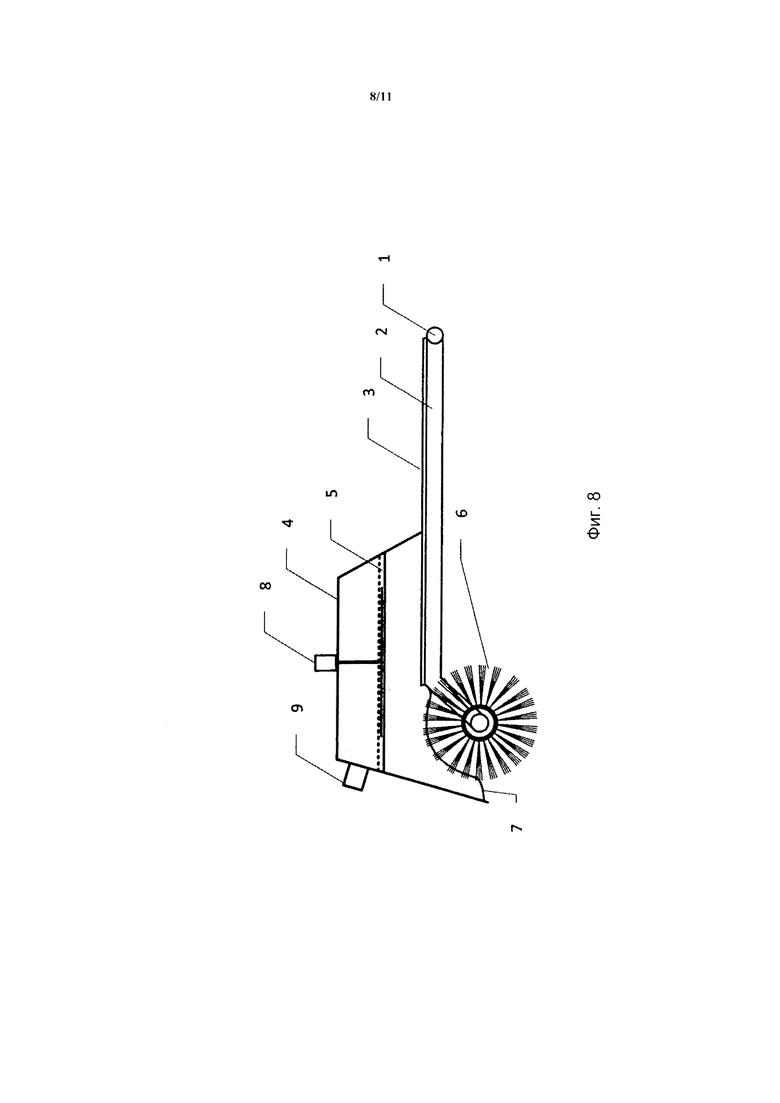
Фиг. 8 разжижитель с поворотным рычагом, цилиндрической щеткой, всасывающим колоколом, решетчатым(-и) сбрасывателем(-ями), ситом и режущим механизмом в разрезе,
Фиг. 9 поперечное сечение плавучего сборного напорного шланга,
Фиг. 10 разжижитель в виде снизу,
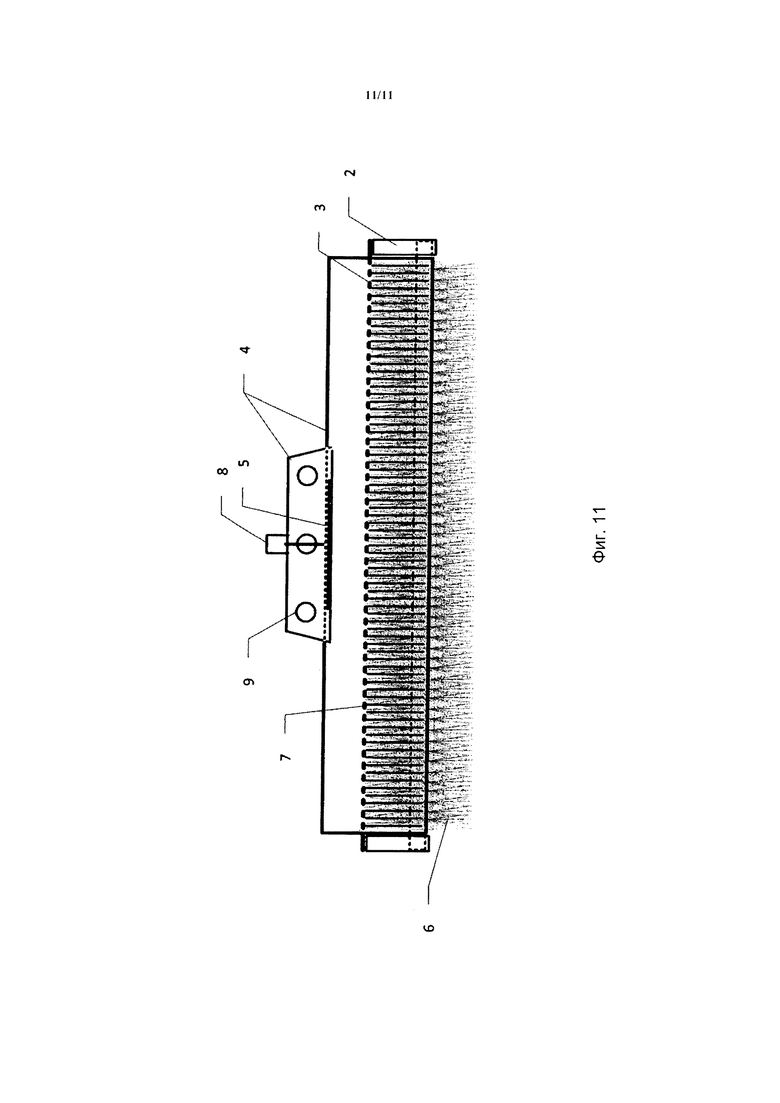
Фиг. 11 разжижитель в виде сзади.
Всасывающий модуль 11 через всасывающий шланг 14 и гидравлические трубопроводы 15 соединен с блоком 12 управления (фиг. 1, 2 и 3).
Выполненный, преимущественным образом, в виде катамарана блок 12 управления имеет плавучее тело 18. На плавучем теле 18 расположены насос 13, гидравлический агрегат 16, устройство 17 управления гидравликой, компрессор 19, электрогенераторный агрегат 20 и резервуар 21 для сбора грязной воды. Резервуар 21 для сбора грязной воды через сборный напорный шланг 22 соединен на берегу с не изображенной намывочной площадкой или с отстойным бассейном или с мобильной станцией сбора намываемого материала. Сборный напорный шланг 22 в своем продольном направлении связан с воздухопроводным шлангом 24, который служит в качестве камеры всплытия.
Устройство 17 управления гидравликой через гидравлические трубопроводы 15 соединено с всасывающим модулем 11. Расположенный(-е) тоже на блоке 12 управления насос(-ы) 13 через всасывающие шланги 14 соединен(-ы) с всасывающими патрубками 9 всасывающего модуля 11. Всасывающие патрубки 9 расположены на всасывающем колоколе 4. На всасывающем колоколе 4 позиционирован привод 8 режущего механизма 5, который находится во всасывающем колоколе 4 и задачей которого является измельчение крупных составных частей намываемого материала (фиг. 4). Режущий механизм 5 имеет по меньшей мере два вращающихся в противоположных направлениях ножа, причем по меньшей мере один нож имеет Z-образную форму (фиг. 10).
Всасывающий колокол 4 опирается на два поворотных рычага 2, а также на уплотнительную плиту 3 и решетку 7 (фиг. 8). Поворотные рычаги 2 имеют две опоры 1, которые размещены в точке вращения на ходовом механизме всасывающего модуля (фиг. 5). Тем самым поворотные рычаги 2 и вместе с ними расположенная между ними, вращающаяся цилиндрическая щетка 6 могут двигаться в вертикальном направлении и обводиться над препятствиями на дне водоема. Цилиндрическая щетка 6 может двигаться, вращаясь в обоих направлениях. Щетина цилиндрической щетки 6 может быть выполнена из разных материалов и с разной длиной с возможностью замены в зависимости состояния грунта водоема (фиг. 11).
Частично направленная вокруг цилиндрической щетки 6 и частично сцепляющаяся с цилиндрической щеткой 6 решетка 7 служит для ее очистки и предотвращает подачу внутрь всасывающего колокола 4 очень крупных составных частей.
Ходовой механизм всасывающего модуля 11 расположен с боков за пределами поворотных рычагов 2. Он имеет две гусеницы 10, которые двигаются через несколько направляющих роликов 23. При этом направляющие ролики расположены так, что при любом направлении движения всасывающего модуля 11 получается наклонное перемещение гусениц 10, что приводит к уверенному продвижению по грунту водоема без опасности застревания (фиг. 6). Каждая гусеница 10 со своей внутренней стороны имеет зубчатую рейку, которая соответственно входит в зацепление с зубчатым колесом привода.
На поверхности 25 водоема, непосредственно над всасывающим модулем 11, расположен плавучий датчик 26 эхолота. Датчик 26 эхолота служит для мониторинга всасывающего модуля 11. При этом датчик 26 эхолота связан с всасывающим модулем 11, преимущественным образом, с помощью вытягиваемой лески 30. Выполненным посредством датчика 26 эхолота конусом 27 передачи охватывается всасывающий модуль 11, уже обработанные всасыванием области ила 29 и еще не обработанные всасыванием области ила 28. Тем самым возможно точное управление всасывающим модулем 11 и блоком 12 управления, так что при необходимости подлежащие очистке поверхности грунта водоема можно точно отличить от уже очищенных площадей.
Разумеется, вместо вытягиваемой лески 30 между датчиком 26 эхолота и всасывающим модулем 11 может быть применено также в значительное мере подобное средство крепления.
Для того чтобы можно было оптимально управлять всасывающим модулем 11, альтернативно вместо датчика 26 эхолота или дополнительно к нему на блоке 12 управления может быть расположена система GPS и/или система камер.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕМЛЕСОСНЫЙ СНАРЯД | 1992 |
|
RU2013497C1 |
| СПОСОБ ПРОИЗВОДСТВА ЗЕМЛЕРОЙНО-УКЛАДОЧНЫХ РАБОТ ПРИ ПРОКЛАДКЕ ПОДВОДНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2507431C2 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ СБОРА, РАЗДЕЛЕНИЯ, НАКОПЛЕНИЯ И УТИЛИЗАЦИИ ДОННЫХ ЗАГРЯЗНЕНИЙ | 2023 |
|
RU2815037C1 |
| Землесосный снаряд | 1991 |
|
SU1831547A3 |
| Передвижная установка для подводной добычи рудного материала | 2024 |
|
RU2834825C1 |
| СПОСОБ ДОБЫЧИ ГАЗОВЫХ ГИДРАТОВ ДОННЫХ ОТЛОЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2554375C1 |
| Волочащееся грунтозаборное устройство земснаряда | 1990 |
|
SU1796002A3 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА | 2005 |
|
RU2289696C1 |
| УСТРОЙСТВО ДЛЯ СБОРА И/ИЛИ УДАЛЕНИЯ ОСАДКА | 2006 |
|
RU2417815C2 |
| ПОДМЕТАЛЬНАЯ МАШИНА ДЛЯ ПРОЕЗЖЕЙ ЧАСТИ С НЕСКОЛЬКИМИ РЕЖИМАМИ ПОДМЕТАНИЯ | 2018 |
|
RU2721270C1 |


Изобретение относится к устройству для забора и удаления отложившихся на дне водоема пластичных, илоподобных веществ, причем вещества отсасываются систематически и безвредно для окружающей среды. В основе изобретения лежит задача, состоящая в том, чтобы разработать устройство, которое систематически собирает грунт водоема, бережно послойно всасывает и самостоятельно продвигается по нему даже при крупных препятствиях. Согласно изобретению это решено за счет того, что управляемое плавучее тело оснащено по меньшей мере одним насосом/компрессором и по меньшей мере одним гидравлическим агрегатом, а также по меньшей мере одним электрогенераторным агрегатом и через трубопроводы соединено с одной стороны с намывочной площадкой, или с отстойным бассейном, или с транспортируемым резервуаром на берегу, а с другой стороны - с всасывающим модулем, который самостоятельно продвигается по грунту водоема с помощью специального гусеничного ходового механизма, через кабель соединен с расположенным плавающим образом на поверхности водоема над всасывающим модулем датчиком эхолота и/или приемником системы GPS, между гусеничными лентами гусеничного ходового механизма, и/или перед ними, и/или позади них имеет самостоятельно подстраивающийся к дну водоема, свободно качающийся, одно-, или двух-, или многорычажный поворотный рычаг, а также имеет расположенные между поворотным(-и) рычагом(-ами) уплотнительную плиту и цилиндрическую щетку, причем цилиндрическая щетка направлена во всасывающем колоколе, в котором расположен режущий механизм, и всасывающий колокол имеет по меньшей мере один фланец/всасывающий патрубок по меньшей мере для одного всасывающего шланга. 19 з.п. ф-лы, 11 ил.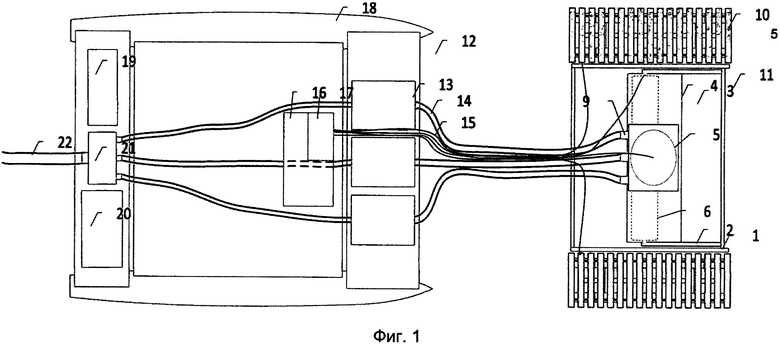
1. Устройство для забора и удаления отложившихся на дне водоема пластичных, илоподобных веществ, причем управляемое плавучее тело через шлангопроводы соединено с всасывающим модулем,
отличающееся тем, что
управляемое плавучее тело (12; 18) оснащено по меньшей мере одним насосом/компрессором (13) и по меньшей мере одним гидравлическим агрегатом (16), а также по меньшей мере одним электрогенераторным агрегатом (20) и через трубопроводы (22; 14) соединено с одной стороны с намывочной площадкой, или с отстойным бассейном, или с транспортируемым резервуаром на берегу, а с другой стороны - с всасывающим модулем (11), который
- самостоятельно продвигается по грунту водоема с помощью специального гусеничного ходового механизма (10),
- через кабель (30) соединен с расположенным плавающим образом на поверхности водоема над всасывающим модулем (11) датчиком (26) эхолота и/или приемником системы GPS,
- между гусеничными лентами гусеничного ходового механизма (10), и/или перед ними, и/или позади них имеет самостоятельно подстраивающийся к дну водоема, свободно качающийся, одно-, или двух-, или многорычажный поворотный рычаг (2),
- а также имеет расположенные между поворотным(-и) рычагом(-ами) уплотнительную плиту (3) и цилиндрическую щетку (6),
- причем цилиндрическая щетка (6) направлена во всасывающем колоколе (4),
- в котором расположен режущий механизм (5),
- и всасывающий колокол (4) имеет по меньшей мере один фланец/всасывающий патрубок (9) по меньшей мере для одного всасывающего шланга (14).
2. Устройство по п. 1, отличающееся тем, что всасывающий модуль (11) внутри имеющего преимущественным образом форму полусферы всасывающего колокола (4) перед цилиндрической щеткой (6) и/или после нее в
направлении грунта водоема, прежде всего в направлении режущего механизма (5), имеет по меньшей мере один решетчатый сбрасыватель (7), который по меньшей мере частично направлен вокруг цилиндрической щетки (6) и по меньшей мере частично входит в зацепление с ее щетиной.
3. Устройство по п. 1 или 2, отличающееся тем, что выше цилиндрической щетки (6) между обоими поворотными рычагами (2) закреплены уплотнительная плита (3) и/или направляющий щиток, которые образуют с цилиндрической щеткой (6) зазор, который за счет своей формы управляет скоростью потока по длине цилиндрической щетки (6).
4. Устройство по пп. 1-3, отличающееся тем, что выше цилиндрической щетки (6) и выше уплотнительной плиты (3) и/или направляющего щитка расположены сито и/или решетка.
5. Устройство по п. 4, отличающееся тем, что ниже сита и/или решетки расположен по меньшей мере один нож в виде вращающегося режущего механизма (5).
6. Устройство по п. 5, отличающееся тем, что под вращающимся ножом расположен статично расположенный, выполненный в форме двойного серпа нож.
7. Устройство по п. 5 и 6, отличающееся тем, что ножи выполнены клешневидно.
8. Устройство по пп. 5-7, отличающееся тем, что режущий механизм (5) приводится в движение посредством расположенного на внешнем контуре всасывающего колокола (4) двигателя/привода (8).
9. Устройство по пп. 1-4, отличающееся тем, что перед гусеничным ходовым механизмом (10) расположены один или несколько косильных механизмов.
10. Устройство по пп. 5-9, отличающееся тем, что насос (13) расположен на всасывающем колоколе, или в нем, или возле него.
11. Устройство по п. 10, отличающееся тем, что насос (13) с помощью трубопроводов (22; 14) через плавучее тело (12; 18) или непосредственно соединен с намывочной площадкой, или с отстойным бассейном, или с транспортируемым резервуаром.
12. Устройство по пп. 1-4, отличающееся тем, что цилиндрическая щетка (6) имеет собственный привод.
13. Устройство по пп. 1-4 и 12, отличающееся тем, что цилиндрическая щетка (6) имеет левое и правое вращение.
14. Устройство по п. 1, отличающееся тем, что гусеничный ходовой механизм (10) на обоих концах имеет повышающийся скос.
15. Устройство по пп. 1 и 14, отличающееся тем, что гусеничный ходовой механизм (10) со своей внутренней стороны, преимущественным образом посредине, имеет зубчатую рейку, в зацепление с которой вступает своим зубчатым колесом привод.
16. Устройство по пп. 1-15, отличающееся тем, что на управляемом плавучем теле расположены эхолот (26), и/или система GPS, и/или система камер, которые соединены с приводом гусеничного ходового механизма (10) и с устройством управления такового.
17. Устройство по п. 16, отличающееся тем, что устройство управления создает систематическую картину очистки грунта водоема и обеспечивает, что всасывающий модуль (11) по меньшей мере один раз очищает необходимые места грунта водоема.
18. Устройство по п. 1, отличающееся тем, что плавучее тело (18) является катамаранным транспортным средством или понтоном, имеющим собственный привод.
19. Устройство по п. 1, отличающееся тем, что трубопроводы (14) и/или напорные шланги (22) выполнены в виде плоских шлангов, к которым с целью плавучести приклеен, или привулканизирован, или иначе прикреплен другой, преимущественным образом наполненный сжатым воздухом, шланг (24).
20. Устройство по пп. 1-19, отличающееся тем, что всасывающий модуль (11) имеет камеру плавучести.
| WO 2012158028 A1, 22.11.2012 | |||
| CN 201183967 Y, 21.01.2009 | |||
| ИНТЕРКОННЕКТОР ДЛЯ ТОПЛИВНЫХ ЭЛЕМЕНТОВ И СПОСОБ ПРОИЗВОДСТВА ИНТЕРКОННЕКТОРА ДЛЯ ТОПЛИВНЫХ ЭЛЕМЕНТОВ | 2009 |
|
RU2507643C2 |
| Приспособление для поперечного разрезания листов на формующем барабане папмашины | 1928 |
|
SU19512A1 |
| DE 3923113 A, 24.01.1991 | |||
| СПОСОБ ПЕРЕДВИЖЕНИЯ И УСТАНОВКИ ШЛЮЗОВОГО КРАНА В ПРОЛЕТ СТРОЯЩЕГОСЯ СООРУЖЕНИЯ | 0 |
|
SU201617A1 |

