Изобретение относится к области оборудования для сбора, очистки и сгущения донных осадков сооружений, ливневых, промышленных стоков отложений рек и озер, а также донных отложений шлаконакопителей [C02F 11/00, C02F 101/32, E02F 5/28, G21F9/34].
Из уровня техники известно УСТРОЙСТВО ДЛЯ ОЧИСТКИ БАССЕЙНА ОТ РАДИОАКТИВНЫХ ДОННЫХ ОТЛОЖЕНИЙ [RU 2513039 C1, опубликовано: 20.04.2014], включающее платформу, смонтированную на плавающем средстве и снабженную опорами, установленную в опорах с возможностью вертикального перемещения рамы с приемной камерой, снабженной соплами и погруженным в нее всасывающим патрубком откачивающего насоса, который подключен к клапану дистанционного управления, соединенному с транспортирующим осадок гибким трубопроводом, отличающееся тем, что в приемную камеру погружены всасывающие патрубки двух пульсационных клапанных погружных насосов, откачивающего и перемешивающего, приемная камера выполнена в виде прямоугольного перевернутого сосуда, соединенного с компенсирующим сосудом, сообщающимся через фильтр с атмосферой, а через обратный клапан с бассейном нагнетательный трубопровод перемешивающего пульсационного клапанного погружного насоса соединен с системой сопел, размещенных внутри приемной камеры, содержащей сопла, установленные по углам приемной камеры и направленные параллельно ее боковым стенкам, и сопла, установленные на крышке приемной камеры и размещенные по линиям, расположенным под углом к соседним боковым стенкам, равным углу расширения затопленных струй, и направленным к всасывающему патрубку откачивающего насоса. К раме присоединен канат, проходящий через блок, установленный над рамой, на платформе установлена дистанционно управляемая лебедка, а патрубки пульсационных клапанных погружных насосов соединены с клапаном дистанционного управления и воздухораспределительными устройствами гибкими трубопроводами. В качестве плавающего средства используется понтон, соединенный бесконечным тросом с установленными на берегу лебедкой и отводным блоком, часть сосудов понтона служит ресивером сжатого воздуха, в качестве источника сжатого воздуха используется компрессор, установленный на берегу и соединенный с ресивером гибким трубопроводом, размещенном на поплавках, а в качестве источника разрежения - эжектор, установленный на плавающем средстве. Устройство снабжено дистанционной компьютерной системой управления, содержащей программируемый микроконтроллер, панель оператора и модемы связи, причем программой предусмотрена блокировка, предусматривающая невозможность включения лебедки при опущенной в донные отложения приемной камере.
Также известна УСТАНОВКА ДЛЯ ОБРАБОТКИ ДОННЫХ ОСАДКОВ [RU 2182134 C2, опубликовано: 10.05.2002], содержащая модуль сбора и перекачивания донного осадка, фильтр грубой очистки, блок подачи флокулянта на входе в фильтр грубой очистки, выход которого сообщен со входом сепаратора, устройство вывода тяжелых механических частиц, емкости сбора нефтепродуктов, осадков, очищенной воды, фильтр, насос, отличающаяся тем, что первый выход сепаратора через насос и устройство сгущения осадка сообщен с емкостью сбора осадков и с емкостью сбора очищенной воды, второй выход сепаратора через фильтр сообщен с емкостью сбора нефтепродуктов, третий выход сепаратора сообщен с устройством вывода тяжелых механических частиц, а четвертый выход сепаратора по воде через акустический фильтр подключен ко второму входу емкости сбора очищенной воды.
Недостатком приведенных аналогов является низкая эффективность обработки донных загрязнений, обусловленная низкой мобильностью заявленных установок, исключающая качественную очистку от загрязнений дна водоема, особенно в труднодоступных местах.
Наиболее близкой по технической сущности является СИСТЕМА УДАЛЕНИЯ ДОННЫХ ОСАДКОВ [US 2002133982 A1, опубликовано: 26.09.2002], включающая судно, приспособленное для плавания на поверхности водоема, гусеничное шасси, приспособленное для погружения в водоем, причем гусеничное шасси включает в себя систему привода для перемещения гусеничного шасси по дну водоема, причем шасси содержит всасывающее устройство, создающее всасывающее усилие, используемое для удаления отложений, лежащих на дне водоема, линию удаления осадка, сообщающуюся с всасывающим устройством и предназначенную для отвода осадка от всасывающего устройства от гусеничного шасси, по меньшей мере одну опорную линию, проходящую вниз от баржи к затопленному устройству, тем самым привязывая затопленное устройство к барже и по меньшей мере одно натяжное устройство, имеющее механическое сообщение с опорным тросом, при этом натяжное устройство постоянно поддерживает натяжное усилие на опорном тросе, тем самым устраняя любое провисание опорного троса между судном и гусеничным шасси и требуя, чтобы судно отслеживало по существу близко к поверхности водоема с гусеничным ходом, когда гусеничный ход следует по дну водоема. Всасывающее устройство представляет собой погружной водяной насос, который погружается вместе с гусеничным ходом. Гусеничный ход включает в себя погружной гидравлический двигатель, который обеспечивает питание водяного насоса.
Основной технической проблемой прототипа является низкая надежность системы, обусловленная тем, что содержит в себе надводную и подводную части, смонтированные на одной платформе, что в свою очередь затрудняет удаление загрязнений на большой глубине из-за ограниченной высоты системы и в труднодоступных местах из-за громоздкости конструкции, высокая нагрузка на надводную часть от накопленных загрязнений, высокая вероятность радиоактивного загрязнения системы и заражения оператора, управляющего системой с надводной части, а также то, что система не обеспечивает полный цикл сбора, накопления и утилизации донных загрязнений. Кроме того, отсутствие в системе механизмов, разрыхляющих осадочный грунт, затрудняет сбор спрессовавшихся и высоковязких загрязнений.
Задача изобретения состоит в устранении недостатков прототипа.
Технический результат изобретения заключается в обеспечении возможности создания маневренного эффективного роботизированного комплекса, реализующего полный цикл сбора, разделения, накопления и очистки донных загрязнений, в том числе повышенной плотности и вязкости.
Указанный технический результат достигается за счет того, что роботизированный комплекс для сбора, разделения, накопления и утилизации донных загрязнений, содержащий подводную часть, выполненную для сбора загрязнений и подачи их в по трубопроводу в надводную часть, выполненную для накопления донных загрязнений, при этом подводная часть выполнена в виде самоходной платформы на гусеничном ходу, отличающийся тем, что управление самоходной платформой выполнено дистанционно с помощью контроллера, средство накопления загрязнений выполнено в виде мешка из эластичного материала, обеспечивающего пропускание жидкости изнутри мешка наружу, надводная часть содержит средства разделения донных загрязнений на жидкую и твердую фазы и очистки жидкой фазы, при этом средство разделения донных загрязнений на жидкую и твердую фазы представляет собой отжимающий пресс, содержащий контейнер с пресс-формой внутри него, пресс-форма выполнена с возможностью размещения в ней мешка из эластичного материала средства накопления загрязнений, а средство очистки жидкой фазы выполнено в виде многослойных трубчатых фильтров, фильтровальные элементы которых выполнен в виде первого слоя из полипропиленовой нити, преимущественно мультифиламентной синтетической нити с преимущественно петлевым ворсом, многократно намотанной на перфорированную гильзу и второго слоя в виде комбинированного слоя на основе материалов МИОН и ФИБАН.
В частности, в стенках пресс-формы выполнены конусные отверстия для удаления из пресс-формы жидкой фазы при прессовании.
В частности, отжимающий пресс выполнен гидравлическим, электрическим, пневматическим, механическим.
В частности, гидравлический отжимающий пресс содержит гидравлический насос, электродвигатель, выполненный с возможностью работы гидравлического насоса, гидравлический насос через фильтр и распределитель соединен с гидроцилиндром, питание гидравлического насоса маслом осуществляется от бака.
В частности, мешок выполнен из сетчатого геотекстильного эластомера.
В частности, к контроллеру подключен интерфейсный модуль, выполненный с возможностью взаимодействия с человеком и внешними устройствами, и включает в себя входные регистры и интерфейсы для подключения периферийных устройств.
В частности, контроллер смонтирован на борту самоходной платформы.
В частности, контроллер смонтирован в надводной части и соединен с элементами платформы, смонтированными на ее борту по кабельной линии.
В частности, управление самоходной платформой осуществляется по кабельной линии связи.
В частности, управление самоходной платформой осуществляется по радиоканалу.
В частности, питание самоходной платформы осуществляется от автономного источника питания, выполненного в виде аккумулятора, смонтированного в герметичном корпусе на платформе.
В частности, питание самоходной платформы осуществляется по кабелю от источника питания, расположенного над поверхностью воды шламохранилища.
Самоходная платформа включает в себя платформу и пару гусеничных движителей, смонтированных с противоположных боковых сторон платформы, приводы ведущих колес которых выполнены отдельными на каждое колесо в виде электрических двигателей с возможностью раздельного приведения в движение ведущих колес, в том числе и в противоположные стороны, обеспечивая движение роботизированного комплекса в различные стороны, поворота платформы и ее остановки, приводы подключены к контроллеру, к которому также подключен модуль технического зрения, смонтированный на платформе и содержащий видеокамеру и активно-импульсный прибор видения, выполненные с возможностью удаленного контроля окружающей платформу обстановки под водой путем отображения контуров объектов в жидкой среде с использованием гидроакустических сигналов на частотах 1-2 МГц в виде двухмерного изображения, смонтированные в передней части платформы электрический шламовый насос и мотор-редуктор разрыхлителя шламовых осадков на валу которого смонтирована насадка, сервоприводы смонтированного на самоходной платформе манипулятора, выполненного в виде механической руки, имеющей переносные и ориентирующие степени подвижности.
В частности, впускной патрубок шламового насоса снабжен механическим фильтром грубой очистки.
В частности, насадка может быть выполнена в виде фрезы, разрыхлительной насадки, щетки с металлической или пластиковой щетиной.
В частности, рабочий орган манипулятора выполнен в виде механического захвата, бура, разрыхлителя, ковша.
В частности, платформа снабжена устройствами для определения скорости движения и положения ее в пространстве.
Краткое описание чертежей.
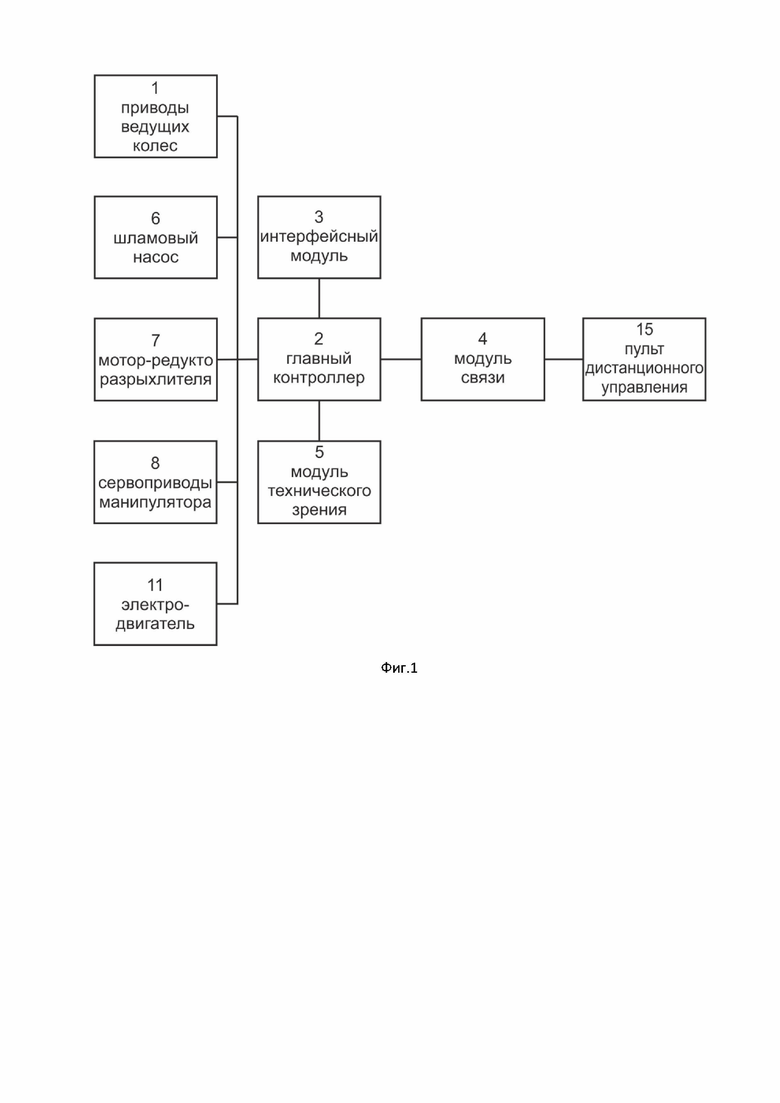
На фиг. 1 схематично показан роботизированный комплекс для сбора, разделения, накопления и утилизации донных загрязнений.
На фиг. 2 показана гидравлическая схема отжимающего пресса.
На фигурах обозначено: 1 - приводы ведущих колес, 2 - контроллер, 3 - интерфейсный модуль, 4 - модуль связи, 5 - модуль технического зрения, 6 - шламовый насос, 7 - мотор-редуктор разрыхлителя, 8 - сервоприводы манипулятора, 9 - гидроцилиндр, 10 - гидравлический насос, 11 - электродвигатель, 12 - фильтр, 13 - бак, 14 - распределитель, 15 - пульт дистанционного управления, 16 - манометр
Осуществление изобретения.
Роботизированный комплекс для сбора, разделения, накопления и утилизации донных загрязнений выполнен с возможностью сбора, накопления донных загрязнений, выделения из них веществ в твердой фазе и последующей передачи для утилизации твердой и жидкой фаз из отобранных донных загрязнений. Может применяться для очистки водоемов и шламохранилищ.
Роботизированный комплекс включает в себя средство сбора загрязнений, средство накопления загрязнений, средство разделения загрязнений на жидкую и твердую фазы, средство очистки жидкой фазы.
Средство сбора загрязнений выполнено в виде управляемой самоходной платформы, выполненной на колесном или гусеничном ходу с возможностью сбора и подачи донных загрязнений в жидкой форме в емкость. В варианте реализации самоходной платформы на гусеничном ходу она включает в себя саму платформу и пару гусеничных движителей, смонтированных с противоположных боковых сторон платформы. Каждый из гусеничных движителей содержит гусеницы, ведущее колесо, поддерживающие и опорные катки и механизм натяжения. Приводы ведущих колес 1 (см. фиг. 1) выполнены в виде пары независимых, по одному на каждое колесо, электрических двигателей, снабженных редукторами, или в виде электрических мотор-редукторов, или в виде сервоприводов. Упомянутые приводы 1 выполнены независимыми с возможностью как одновременного, так раздельного приведения в движение ведущих колес, в том числе и в противоположные стороны, обеспечивая движение роботизированного комплекса в различные стороны, поворота/разворота платформы с малым радиусом поворота/разворота.
Управление приводами ведущих колес 1 гусеничных движителей для их раздельного включения, обеспечения вращения в одну и в разные стороны или вращения с разными угловыми скоростями осуществляется с помощью контроллера 2.
К контроллеру 2 подключен интерфейсный модуль 3, выполненный с возможностью взаимодействия с человеком и внешними устройствами. Интерфейсный модуль 3 включает в себя входные регистры, интерфейсы для подключения различных цифровых приборов, стандартных периферийных устройств (клавиатуры, монитора, сенсорных дисплеев, накопителей, джойстика и т.п.). К контроллеру 2 также подключен модуль связи 4, выполненный с возможностью удаленного управления контроллером 2, приема и передачи информации.
Самоходная платформа может быть снабжена акселератором, гироскопом и другими устройствами (блок GSM, лидар и т.д.), подключенными к контроллеру 2 для определения ее скорости движения и положения в пространстве.
Снаружи на платформе роботизированного комплекса смонтирован модуль технического зрения 5, содержащий, по крайней мере, видеокамеру и активно-импульсный прибор видения. Активно-импульсный прибор видения позволяет отображать основные контуры объекта в жидкой среде в виде двухмерного изображения, формируемого в реальном масштабе времени с использованием гидроакустических сигналов на частотах 1-2 МГц, что позволяет получить изображение объекта на расстоянии до 10 м в мутной воде при использовании сектора обзора шириной 30° и частоте смены кадров 37 кадров в секунду.
Модуль технического зрения 5 выполнен с возможностью удаленного контроля окружающей платформу обстановки для корректировки траектории движения платформы и подключен к контроллеру 2.
В передней части платформы роботизированного комплекса на штанге, смонтирован электрический шламовый насос 6, выполненный с возможностью сбора по ходу движения платформы перед ним осадков и загрязнений, в том числе, радиоактивных и/или токсических со дна водоема (шламохранилища) и/или его стенок. Впускной патрубок шламового насоса 6 снабжен механическим фильтром грубой очистки (на фигурах не показан), выполненным в виде цилиндрического экрана, предотвращающим засасывание насосом 6 крупных загрязнений. Шламовый насос 6 подключен к контроллеру 2.
На штанге с шламовым насосом 6 смонтирован разрыхлитель, выполненный в виде вертикального мотор-редуктора 7, на валу которого смонтирована насадка, выполненная с возможностью взрыхления шламовых осадков и снижения нагрузки на шламовый насос 6. Насадка может быть выполнена в виде фрезы, разрыхлительной насадки, щетки с металлической или пластиковой щетиной и т.д. Тип насадки выбирают в зависимости от плотности шламовых отложений и исходя из условий работы самоходной платформы. Мотор-редуктор разрыхлителя 7 подключен к контроллеру 2.
Сверху на самоходной платформе смонтирован манипулятор, выполненный в виде механической руки, имеющий, по крайней мере, две переносных и одну ориентирующую степени подвижности (свободы). В качестве рабочего органа манипулятора может быть смонтирован, в зависимости от условий работы самоходной платформы, механический захват, бур, разрыхлитель, ковш и т.д. Сервоприводы манипулятора 8 подключены к контроллеру 2.
Шламовый насос 6 соединен трубопроводом, выполненным, например, в виде гибкого гофрированного шланга, со средством накопления загрязнений, находящимся над поверхностью воды шламохранилища и выполненным в виде емкости, преимущественно в виде мешка из сетчатого геотекстильного высокопрочного эластомера, с возможностью его последующей безопасной утилизации, быстрой замены после его износа или повреждения. Геотекстильный мешок выполнен с возможностью его размещения в отжимную форму, изготовленную, например, из полимерной высокопрочной эластичной сетки, которая в свою очередь выполнена с возможностью размещения в средстве разделения загрязнений на жидкую и твердую фазы.
Средство разделения загрязнений на жидкую и твердую фазы выполнено в виде отжимающего пресса. Упомянутый отжимающий пресс может быть выполнен гидравлическим, электрическим, пневматическим, механическим и т.д. с возможностью прессования отобранных донных загрязнений в мешке и удаления из твердой фазы донных загрязнений жидкой фазы под воздействием пресса.
Отжимающий пресс выполнен в виде горизонтально ориентированного контейнера, с одного торца которого смонтирован шток гидроцилиндра 9, соединенный с транспортной тележкой, смонтированной подвижно на направляющей внутри на полу контейнера. На тележке смонтирована разъемная пресс-форма.
Отжимающий пресс в варианте реализации его гидравлическим содержит гидравлический насос 10 (см. фиг. 2), электродвигатель 11, фильтр 12, бак 13, распределитель 14 и гидроцилиндр 9. Электродвигатель 11 выполнен с возможностью работы гидравлического насоса 10 и подключен к контроллеру 2 для управления им с помощью контроллера 2. Гидравлический насос 10 через фильтр 12 и распределитель 14 соединен с гидроцилиндром 9. Питание гидравлического насоса 10 маслом осуществляется от бака 13.
Пресс-форма выполнена с возможностью удаления жидкой фазы из отобранных донных загрязнений и придания геотекстильному мешку с отобранными донными загрязнениями определенной геометрической формы, например, цилиндрической.
В стенках пресс-формы выполнены конусные отверстия для удаления из пресс-формы жидкой фазы при прессовании. Геометрические характеристики пресс-форм выбираются исходя из поставленных задач по дальнейшей утилизации обезвоженных донных загрязнений.
Контроллер 2 может быть смонтирован как на борту самоходной платформы, так и отдельно и в этом варианте реализации контроллер 2 соединен с элементами платформы, смонтированными на ее борту по кабельной линии.
Управление самоходной платформой осуществляется дистанционно, по кабелю или радиоканалу. Питание самоходной платформы может осуществляться как от автономного источника питания, выполненного в виде аккумулятора, смонтированного в герметичном корпусе на платформе, так и по кабелю от источника питания, расположенного над поверхностью воды шламохранилища.
Роботизированный комплекс для сбора, разделение, накопления и утилизации донных загрязнений используют следующим образом.
Самоходную платформу погружают под воду с берега или с плавательного средства. Самоходной платформой управляют путем задания ей алгоритма, занесенного в память контроллера 2 или дистанционно оператором с пульта дистанционного управления 15 с дисплеем для управления и отображения видеоконтента и других технических данных, поступающих от модуля технического зрения и контроллера 2.
Самоходная платформа по ходу движения по маршруту удаления донных загрязнений с помощью шламового насоса 6 закачивает по трубопроводу в геотекстильный мешок донные загрязнения вместе с водой.
Поворот, разворот, движение назад, движение вперед, остановку самоходной платформы осуществляют за счет гусеничных движителей путем попеременного или одновременного включения/отключения приводов ведущих колес 1 гусеничных движителей.
При необходимости, включают разрыхлитель для взрыхления донных осаждений возле шламового насоса 6.
В случае появления на пути движения самоходной платформы препятствий, оператор с помощью манипулятора расчищает себе путь, перемещая препятствия на другое место.
Первичное удаление жидкой фазы из отобранных донных загрязнений осуществляется путем самопроизвольного выхода свободной избыточной жидкой фазы сквозь мелкие поры стенок геотекстильного мешка. В результате этого происходит обезвоживание собранных донных загрязнений и, как следствие, уменьшение объема.
Для улучшения удаления жидкой фазы из донных загрязнений заранее, перед подключением к трубопроводу, в геотекстильный мешок могут добавлять реагенты (флокулянты, коагулянты), например, органические полимеры на основе полиакриламида. Эти реагенты связывают между собой мелкие частицы твердой фазы донных загрязнений, благодаря чему увеличивается скорость удаления жидкой фазы, а фильтрат, выходящий наружу из геотекстильного мешка, получается чистым и не содержит механических взвесей.
С помощью отжимающего пресса геотекстильный мешок с отобранными донными загрязнениями прессуют (отжимают).
Гидравлическим насосом 10 который приводиться в действие электродвигателем 11, гидравлическое масло через фильтр 12 из бака 13 и распределитель 14 подают на гидроцилиндр 9. В процессе опускания штока гидроцилиндра 9 производиться отжим геотекстильного мешка и освобождение твердой фазы донных загрязнений от жидкой фазы. Режим работы пресса контролируют с помощью манометра 16, который может быть выполнен цифровым, и информация от которого может передаваться вместе со всеми данными оператору.
Прессование геотекстильного мешка в отжимающем прессе значительно снижает время удаления жидкой фазы из донных загрязнений и увеличивает содержание твердой фазы до 75%.
Глубокое удаление жидкой фазы и консолидация донных загрязнений в геотекстильном мешке продолжается уже после извлечения геотекстильного мешка из отжимающего пресса и отжимной формы после окончания работ под водой испарением жидкой фазы через его стенки благодаря хорошей проницаемости материала геотекстиля.
Кроме того, материал геотекстильного мешка пропускает изнутри жидкую фазу, но не впитывает атмосферные осадки и твердая фаза загрязнений не подвергается повторному обводнению.
Отделенную от собранных в геотекстильном мешке донных загрязнений жидкую фазу утилизируют различными способами, например, самотеком или по проложенным трубопроводам от отжимающего пресса обратно в шламохранилище, по трубопроводам в отдельную емкость, для последующей передачи ее на специализированные предприятия или подают в установки очистки.
При подаче жидкой фазы в установки очистки жидкость с помощью насоса установки очистки от отжимающего пресса подают на многослойные горизонтальные трубчатые фильтры, фильтровальный элемент которых выполнен в виде первого слоя из полипропиленовой нити, преимущественно мультифиламентной синтетической нити с преимущественно петлевым ворсом, многократно намотанной на перфорированную гильзу и второго слоя в виде комбинированного слоя на основе материалов МИОН и/или ФИБАН.
За счет выполнения первого слоя фильтра из мультифиламентной синтетической нити с преимущественно петлевым ворсом обеспечивается увеличение срока службы фильтра в 2 раза по сравнению с аналогами за счет увеличения его грязеемкости, которая, в свою очередь, обеспечивается увеличением пористости и однородности структуры намотанной нити, при этом пористость структуры определяется толщиной ворса, заполняющего ячейки межвиткового пространства намотки. Однородность структуры связана с упругостью ворса. В том случае, если нить является мультифиламентной и обладает петлевым ворсом, то толщина ворса уменьшается, что обеспечивает его истончение по сравнению с толщиной нетекстурированного филамента. Петлевой, а значит более упругий по сравнению с концевым, ворс в сочетании с его малой толщиной обеспечивает увеличение пористости и однородности структуры нити и ее слоев и способствует увеличению срока службы фильтрующего элемента.
Кроме того, применение мультифиламентной синтетической нити обеспечивает повышение тонкости очистки жидкости в течение всего срока эксплуатации фильтра за счет уменьшения размера пор в структуре слоев нити. Размеры пор уменьшаются, поскольку большая прочность мультифиламентной нити допускает ее большее натяжение при намотке и, следовательно, более плотную намотку, что обеспечивает уменьшение размеров ячеек межвиткового пространства намотки, заполненных истонченным петлевым ворсом.
Также сохраняется стабильность фильтрующих свойств при увеличении расхода жидкости через фильтр за счет охранения геометрической стабильности структуры фильтра под напором фильтруемой жидкости. При увеличении расхода возрастает разность давления на входе и выходе фильтра и возрастает радиальный градиент давления в фильтровальном элементе, при этом упругость петлевого ворса препятствует его залеганию под напором фильтруемой жидкости и способствует сохранению геометрической стабильности капиллярной структуры фильтровального элемента.
МИОН К-5 - слабокислотный волокнистый катионит с трехмерной сшитой структурой. Катионообменный материал МИОН К-5 поглощает радиоактивные элементы в ионной и молекулярной формах. Материал МИОН К-5 выпускаются в водородной (Н+) или натриевой (Na+) формах. Обменная (хемосорбционная) емкость материалов МИОН К-5 по карбоксильным группам (-СООН) равна Е = 4,5-5,5 ммоль/г. В жидкой фазе материалы МИОН К-5 используются для очистки радиоактивной жидкости от ионов тяжелых металлов, в т.ч. ртути, свинца, никеля , кадмия, железа (+2) (+3), марганца и проч. Материал МИОН К-5 поглощает из радиоактивной жидкости следующие радиоактивные элементы при нормативном уровне содержания с эффективностью очистки (в %):
цезий (Сs)-134 40-70,
cтронций (Sr)-90 40-70,
свинец (Pb)-210 70-80,
иод (I2)-131 40-70,
радий (Ra)-228 40-70,
уран (U)-234(238) 70-80,
торий (Th)-230 40-70,
полоний (Po)-210 75-85,
плутоний (Pu)- 239 80-95,
америций (Am)-241 80-95.
ФИБАН предназначен для удаления из радиоактивной жидкости радионуклида кобальта Со-60 и цезия Сs-137. Фибан производится из филаментов с одинаковым диаметром в пределах 20-50 микрон. Обладает высокой скоростью ионообменных, сорбционных и каталитических процессов. Типичное время половинного ионообменного процесса на волокнах ФИБАН 2-10 секунд, тогда как на промышленных ионообменных смолах 30-200 секунд. Высокая скорость процесса достигается за счет короткого диффузионного пути поглощаемого иона внутрь ионообменного волокна.
ФИБАН и МИОН стойки к концентрированным кислотам HCl, H2SO4, устойчивы к органическим растворителям. При длительном действии концентрированных щелочей увеличивается емкость и набухаемость.
Очищенная жидкость после установки очистки по трубопроводу поступает в специально подготовленное хранилище.
Закачка донных загрязнений с помощью шламового насоса 6 в геотекстильный мешок является высокоэкономичным методом для удаления жидкой фазы и утилизации шламовых отложений. Геотекстильный мешок позволяет увеличить концентрацию твердых осадков. В таблице 1 приведены начальное и конечное содержание твердой фазы донных загрязнений перед закачкой их в геотекстильный мешок и после удаления из геотекстильного мешка жидкой фазы.
Осадок в геотекстильном мешке изолирован от окружающей среды и не подвержен влиянию атмосферных осадков и ветра. Геотекстильный мешок может наполняться в несколько циклов по мере освобождения внутреннего пространства от жидкой составляющей, что значительно повышает эффективность их применения.
Использование геотекстильного мешка - это высокоэкономичный метод для удаления жидкой фазы и утилизации твердой фазы донных загрязнений и позволяет увеличить концентрацию твердой фазы в мешке.
При исходной концентрации 4-10%, после завершения цикла обезвоживания получается 70-75% твердой фазы. Осадок в геотекстильном мешке изолирован от окружающей среды и не подвержен влиянию атмосферных осадков и ветра. Геотекстильный мешок может наполняться в несколько циклов по мере освобождения внутреннего пространства от жидкой фазы, что значительно повышает эффективность их применения. Прочность геотекстиля не ограничивает количество циклов «наполнение-удаление жидкой составляющей». Технология с применением геотекстильного мешка обеспечивает эффективное удаление жидкой составляющей из радиоактивных или токсичных шламовых отложений.
Маневренность роботизированного комплекса обеспечивается за счет механической независимости подводной части комплекса, выполненного в виде самоходной гусеничной платформы, снабженной собственными независимыми приводами ведущих колес 1 каждого из движителей, управляемых с помощью контроллера 2. Кроме того, наличие на управляемой самоходной платформе манипулятора, позволяющего проводить расчистку путей движения платформы и разрыхлителя, позволяющего разрыхлять донные осадки перед их всасыванием шламовым насосом, обеспечивает эффективное применение комплекса. Также на эффективное применение комплекса оказывает влияние и наличие на управляемой самоходной платформе модуля технического зрения 5, позволяющего отображать основные контуры объекта в жидкой среде в виде двухмерного изображения, формируемого в реальном масштабе времени с использованием гидроакустических сигналов на частотах 1-2 МГц, что в свою очередь обеспечивает получение изображения объекта на расстоянии до 10 м в мутной воде при использовании сектора обзора шириной 30° и частоте смены кадров 37 кадров в секунду.
Полный цикл сбора, разделения, накопления и очистки донных загрязнений реализуется с помощью управляемой самоходной платформы, от которой загрязнения в жидком виде подаются по трубопроводу в надводную часть в средство накопления загрязнений в виде мешка из эластичного материала, обеспечивающего пропускание жидкости изнутри мешка наружу, средство разделения донных загрязнений на жидкую и твердую фазы в виде отжимающего пресса и средство очистки жидкой фазы в виде многослойных трубчатых фильтров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЗООТВОД ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С БЫСТРОСЪЕМНОЙ ТЕПЛО-, ШУМО-, ВИБРОИЗОЛЯЦИЕЙ | 2024 |
|
RU2829246C1 |
| СТАЦИОНАРНАЯ ВИБРОИЗОЛИРУЮЩАЯ ПЛАТФОРМА ДЛЯ САНИТАРНЫХ НОСИЛОК | 2023 |
|
RU2815052C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФЛАНЦА ГАЗООТВОДОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ ГАЗОПЕРЕКАЧИВАЮЩИХ АГРЕГАТОВ ИЗ КОРРОЗИОННО-СТОЙКОЙ СТАЛИ АУСТЕНИТНОГО КЛАССА 12Х18Н9ТЛ ДИАМЕТРОМ 500-2500 ММ | 2021 |
|
RU2772615C1 |
| УСТРОЙСТВО ДЛЯ ФИЛЬТРАЦИИ ДОННЫХ ОТЛОЖЕНИЙ | 2023 |
|
RU2806198C1 |
| СБОРНО-РАЗБОРНЫЙ ГРУЗОВОЙ КОНТЕЙНЕР С УНИВЕРСАЛЬНОЙ ВИБРОИЗОЛИРУЮЩЕЙ ПЛАТФОРМОЙ, ОСНАЩЕННОЙ СИСТЕМАМИ РЕГУЛИРУЕМЫХ БЛОК-ЭЛЕМЕНТОВ ДЕМПФИРУЮЩИХ ПРУЖИН ДЛЯ ТЯЖЕЛЫХ НАГРУЗОК | 2022 |
|
RU2791065C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВХОДНОГО НАСАДКА ДЛЯ ВХОДНОГО УСТРОЙСТВА ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ ГАЗОПЕРЕКАЧИВАЮЩИХ АГРЕГАТОВ | 2022 |
|
RU2782763C1 |
| Способ утилизации нефтешлама | 2019 |
|
RU2710174C1 |
| УСТРОЙСТВО И СПОСОБ ПЕРЕРАБОТКИ НЕФТЯНОГО ШЛАМА | 2017 |
|
RU2688820C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| НАДВОДНАЯ ПЛАТФОРМА ДЛЯ ПОДНЯТИЯ И ОБРАБОТКИ ГРУЗОВ СО ДНА АКВАТОРИИ, В ТОМ ЧИСЛЕ ОПАСНЫХ | 2012 |
|
RU2521070C2 |

Изобретение относится к области оборудования для сбора, очистки и сгущения донных осадков сооружений, ливневых, промышленных стоков отложений рек и озер, а также донных отложений шлаконакопителей. Роботизированный комплекс для сбора, разделения, накопления и утилизации донных загрязнений содержит подводную и надводную части. Подводная часть выполнена в виде самоходной платформы на гусеничном ходу. Управление самоходной платформой осуществляют дистанционно с надводной части с помощью контроллера. Средство накопления загрязнений выполнено в виде мешка из эластичного материала, обеспечивающего пропускание жидкости изнутри мешка наружу. Надводная часть содержит средства разделения донных загрязнений на жидкую и твердую фазы и очистки жидкой фазы. Средство разделения донных загрязнений на жидкую и твердую фазы представляет собой отжимающий пресс, содержащий контейнер с пресс-формой внутри него. Пресс-форма выполнена с возможностью размещения в ней мешка из эластичного материала средства накопления загрязнений. Средство очистки жидкой фазы выполнено в виде многослойных трубчатых фильтров, фильтровальные элементы которых выполнены в виде первого слоя из полипропиленовой нити, преимущественно мультифиламентной синтетической нити с преимущественно петлевым ворсом, многократно намотанной на перфорированную гильзу, и второго слоя в виде комбинированного слоя из материалов МИОН и ФИБАН. Самоходная платформа включает в себя платформу и пару гусеничных движителей, смонтированных с противоположных боковых сторон платформы, приводы ведущих колес которых выполнены отдельными на каждое колесо в виде электрических двигателей. Приводы подключены к контроллеру, к которому также подключен модуль технического зрения, смонтированный на платформе и содержащий видеокамеру и активно-импульсный прибор видения. В передней части платформы смонтированы электрический шламовый насос и мотор-редуктор разрыхлителя шламовых осадков, на валу которого смонтирована насадка. Технический результат: обеспечение возможности создания маневренного эффективного роботизированного комплекса, реализующего полный цикл сбора, разделения, накопления и очистки донных загрязнений, в том числе повышенной плотности и вязкости. 2 н. и 15 з.п. ф-лы, 1 табл., 2 ил.
1. Роботизированный комплекс для сбора, разделения, накопления и утилизации донных загрязнений, содержащий подводную часть, выполненную для сбора загрязнений и подачи их по трубопроводу в надводную часть, выполненную для накопления донных загрязнений, при этом подводная часть выполнена в виде самоходной платформы на гусеничном ходу, отличающийся тем, что управление самоходной платформой осуществляют дистанционно с надводной части с помощью контроллера, средство накопления загрязнений выполнено в виде мешка из эластичного материала, обеспечивающего пропускание жидкости изнутри мешка наружу, надводная часть содержит средства разделения донных загрязнений на жидкую и твердую фазы и очистки жидкой фазы, при этом средство разделения донных загрязнений на жидкую и твердую фазы представляет собой отжимающий пресс, содержащий контейнер с пресс-формой внутри него, пресс-форма выполнена с возможностью размещения в ней мешка из эластичного материала средства накопления загрязнений, а средство очистки жидкой фазы выполнено в виде многослойных трубчатых фильтров, фильтровальные элементы которых выполнены в виде первого слоя из полипропиленовой нити, преимущественно мультифиламентной синтетической нити с преимущественно петлевым ворсом, многократно намотанной на перфорированную гильзу, и второго слоя в виде комбинированного слоя из материалов МИОН и ФИБАН.
2. Комплекс по п. 1, отличающийся тем, что в стенках пресс-формы выполнены конусные отверстия для удаления из пресс-формы жидкой фазы при прессовании.
3. Комплекс по п. 1, отличающийся тем, что отжимающий пресс выполнен гидравлическим, электрическим, пневматическим, механическим.
4. Комплекс по п. 3, отличающийся тем, что гидравлический отжимающий пресс содержит гидравлический насос, электродвигатель, выполненный с возможностью работы гидравлического насоса, гидравлический насос через фильтр и распределитель соединен с гидроцилиндром, питание гидравлического насоса маслом осуществляется от бака.
5. Комплекс по п. 1, отличающийся тем, что мешок выполнен из сетчатого геотекстильного эластомера.
6. Комплекс по п. 1, отличающийся тем, что к контроллеру подключен интерфейсный модуль, выполненный с возможностью взаимодействия с человеком и внешними устройствами, и включает в себя входные регистры и интерфейсы для подключения периферийных устройств.
7. Комплекс по п. 1, отличающийся тем, что контроллер смонтирован в надводной части и соединен с элементами платформы, смонтированными на ее борту по кабельной линии.
8. Комплекс по п. 1, отличающийся тем, что контроллер смонтирован на борту самоходной платформы.
9. Комплекс по п. 1, отличающийся тем, что управление самоходной платформой осуществляется по кабельной линии связи.
10. Комплекс по п. 1, отличающийся тем, что управление самоходной платформой осуществляется по радиоканалу.
11. Комплекс по п. 1, отличающийся тем, что питание самоходной платформы осуществляется от автономного источника питания, выполненного в виде аккумулятора, смонтированного в герметичном корпусе на платформе.
12. Комплекс по п. 1, отличающийся тем, что питание самоходной платформы осуществляется по кабелю от источника питания, расположенного над поверхностью воды шламохранилища.
13. Самоходная платформа роботизированного комплекса, указанная в п. 1, характеризующаяся тем, что включает в себя платформу и пару гусеничных движителей, смонтированных с противоположных боковых сторон платформы, приводы ведущих колес которых выполнены отдельными на каждое колесо в виде электрических двигателей с возможностью раздельного приведения в движение ведущих колес, в том числе и в противоположные стороны, обеспечивая движение роботизированного комплекса в различные стороны, поворота платформы и ее остановки, приводы подключены к контроллеру, к которому также подключен модуль технического зрения, смонтированный на платформе и содержащий видеокамеру и активно-импульсный прибор видения, выполненные с возможностью удаленного контроля окружающей платформу обстановки под водой путем отображения контуров объектов в жидкой среде с использованием гидроакустических сигналов на частотах 1-2 МГц в виде двухмерного изображения, смонтированные в передней части платформы электрический шламовый насос и мотор-редуктор разрыхлителя шламовых осадков, на валу которого смонтирована насадка, сервоприводы смонтированного на самоходной платформе манипулятора, выполненного в виде механической руки, имеющей переносные и ориентирующие степени подвижности.
14. Самоходная платформа по п. 13, отличающаяся тем, что впускной патрубок шламового насоса снабжен механическим фильтром грубой очистки.
15. Самоходная платформа по п. 13, отличающаяся тем, что насадка может быть выполнена в виде фрезы, разрыхлительной насадки, щетки с металлической или пластиковой щетиной.
16. Самоходная платформа по п. 13, отличающаяся тем, что рабочий орган манипулятора выполнен в виде механического захвата, бура, разрыхлителя, ковша.
17. Самоходная платформа по п. 13, отличающаяся тем, что платформа снабжена устройствами для определения скорости движения и положения ее в пространстве.
| US 2002133982 A1, 26.09.2002 | |||
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ БАССЕЙНА ОТ РАДИОАКТИВНЫХ ДОННЫХ ОТЛОЖЕНИЙ | 2012 |
|
RU2513039C1 |
| УСТРОЙСТВО ДЛЯ ЗАБОРА И УДАЛЕНИЯ ОТЛОЖИВШИХСЯ НА ДНЕ ВОДОЕМА ПЛАСТИЧНЫХ, ИЛОПОДОБНЫХ ВЕЩЕСТВ | 2015 |
|
RU2672695C2 |
| JP H05111697 A, 07.05.1993 | |||
| CN 111111268 A, 08.05.2020 | |||
| KR 101106770 B1, 18.01.2012. | |||

