Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к области автоматических выключателей и, в частности, к непрерывному мониторингу механических характеристик автоматического выключателя.
Уровень техники
В последние несколько лет все больше экспертов уделяют большое внимание научно-исследовательским и опытно-конструкторским работам по мониторингу механических характеристик автоматического выключателя. Динамические характеристики автоматического выключателя могут эффективно отражать сбой в работе автоматического выключателя. Поэтому механические характеристики считают одними из наиболее важных признаков автоматического выключателя, и требуется отслеживать механические характеристики автоматического выключателя.
В настоящее время мониторинг механических характеристик автоматического выключателя выполняют с помощью электронных датчиков в отключенном состоянии. Отключенное состояние может представлять собой условия проведения исследований, когда автоматический выключатель электрически не подключен к сети и, таким образом, не подвергается воздействию высокого напряжения в сети. Напряжение тестирования является сравнительно низким, так что оно не оказывает негативного воздействия на нормальную работу электронных датчиков. Тем не менее, так как контакт цепи в отключенном состоянии или при тестировании не подвергается воздействию реального высокого напряжения, то наблюдаемый результат может не точно отражать практическое рабочее состояние автоматического выключателя и, таким образом, может служить только в качестве ограниченной справочной информации для изучения автоматического выключателя.
По мере развития технологии интеллектуальной энергосистемы возникает потребность в интеллектуальных автоматических выключателях, которые могут во время работы отслеживать механические характеристики автоматических выключателей при нормальной их работе, чтобы поддерживать функции интеллектуальной энергосистемы. Непрерывный мониторинг может отражать действительное рабочее состояние автоматического выключателя, и, таким образом, он более полезен для изучения и управления автоматическим выключателем.
Точный мониторинг механических характеристик автоматического выключателя зависит от нахождения точного момента времени замыкания и размыкания автоматического выключателя. Как только получен момент времени размыкания и замыкания, известным способом, исходя из момента времени замыкания и размыкания, могут быть получены другие механические характеристики автоматического выключателя, такие как зазор при размыкании контактов, ход контактной пружины и скорость замыкания и размыкания.
Однако существующий способ мониторинга в отключенном состоянии не годится для непрерывного мониторинга. Высокое напряжение в сети при подключенном состоянии может легко повредить электронные компоненты, используемые при мониторинге в отключенном состоянии.
Кроме того, так как момент времени электрического замыкания и размыкания при высоком напряжении не может отражать реальное механическое замыкание и размыкание подвижного контакта из-за пробоя при высоком напряжении, необходимо найти момент времени механического замыкания и размыкания подвижного контакта в рабочем состоянии автоматического выключателя, чтобы точно отслеживать механические характеристики автоматического выключателя. Тем не менее, сложно непосредственно отслеживать точные моменты времени замыкания и размыкания автоматического выключателя под высоким напряжением.
Поэтому, требуется способ непрерывного мониторинга механических характеристик автоматического выключателя, в частности, непрерывного мониторинга точного момента времени механического замыкания и размыкания.
Сущность изобретения
Следовательно, чтобы преодолеть один или несколько недостатков существующего уровня техники, упомянутых выше, одна из целей вариантов осуществления настоящего изобретения заключается в том, чтобы предложить способ и устройство для непрерывного мониторинга механических характеристик автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, предложен способ мониторинга автоматического выключателя. Автоматический выключатель содержит приводной механизм для выполнения замыкания и размыкания подвижного контакта автоматического выключателя. Способ содержит следующие этапы: получают характеристическое усилие, связанное с приводным механизмом в течение времени; и определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения усилия. Этап определения дополнительно содержит определение момента, когда происходит увеличение характеристического усилия, в качестве момента времени замыкания автоматического выключателя; и определение момента, когда происходит снижение характеристического усилия, в качестве момента времени размыкания автоматического выключателя.
Так как точный момент времени замыкания или размыкания автоматического выключателя можно определить путем измерения характеристических усилий, то на электронные компоненты датчиков и процесс измерения не будут негативно воздействовать такие неблагоприятные условия возле подвижного контакта, как высокое напряжение, комплексное магнитное поле и дуговой разряд. В результате, мониторинг момента времени замыкания или размыкания автоматического выключателя можно осуществлять во время нормальной работы автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, характеристическое усилие представляет собой по меньшей мере одно из следующего:
- контактное усилие, которое непосредственно оказывает на рычажный механизм приводного механизма подвижный контакт автоматического выключателя;
- внутреннее усилие, оказываемое любым рычагом рычажного механизма приводного механизма;
- результирующее усилие, оказываемое каждым концом любого рычага рычажного механизма;
- компонента результирующего усилия, оказываемого каждым концом любого рычага рычажного механизма, причем эта компонента действует в направлении контактного усилия;
- компонента результирующего усилия, оказываемого каждым концом любого рычага рычажного механизма, причем эта компонента действует в направлении перпендикулярном контактному усилию;
- результирующее усилие, оказываемое любой осевой точкой рычажного механизма;
- компонента результирующего усилия, оказываемого любой осевой точкой рычажного механизма, причем эта компонента действует в направлении контактного усилия;
- компонента результирующего усилия, оказываемого любой осевой точкой рычажного механизма, причем эта компонента действует в направлении перпендикулярном контактному усилию.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап получения содержит следующее: с использованием измеренного усилия, связанного с приводным механизмом, вычисляют контактное усилие, которое непосредственно оказывает на рычажный механизм приводного механизма подвижный контакт автоматического выключателя. Этап определения содержит следующее: определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения вычисленного контактного усилия. Контактное усилие можно вычислить с использованием измеренного усилия, которое измеряют в любой осевой точке рычажного механизма.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, изменение усилия идентифицируют, исходя из величины усилия и/или скорости изменения усилия.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап получения содержит следующее: считывают некоторое число значений характеристического усилия в различные моменты времени от начального момента и получают первый массив F [a1, а2, … ai, … аn], представляющий значения характеристического усилия в моменты считывания, и второй массив Т [t1, t2, … ti, … tn], представляющий соответствующие моменты времени считывания, причем "ai" - это значение считанного характеристического усилия для i-го момента времени, "n" - число отсчетов, "ti" - момент времени для i-го считывания.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап определения содержит следующее: идентифицируют элемент, начиная с первого элемента в первом массиве F, значение которого впервые достигает или превосходит первое заданное значение усилия, и определяют момент времени во втором массиве Т, соответствующий идентифицированному элементу из первого массива F как момент времени замыкания автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап определения содержит следующее: идентифицируют элемент, начиная с первого элемента в первом массиве F, значение которого впервые меньше или равно второму заданному значению усилия, и определяют момент времени во втором массиве Т, соответствующий идентифицированному элементу из первого массива F, как момент времени размыкания автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап определения содержит следующее: идентифицируют элемент, начиная с первого элемента первого массива F, который впервые удовлетворяет следующему условию: имеется только заданное число следующих друг за другом элементов от предыдущего элемента до идентифицированного элемента в первом массиве F, причем каждый из идущих друг за другом элементов имеет значение, меньшее или равное второму заданному значению усилия; а затем определяют момент времени во втором массиве Т, соответствующий первому элементу из заданного числа следующих друг за другом элементов в первом массиве F как момент времени размыкания автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап получения также содержит следующее: вычисляют и получают третий массив dF [(a2-a1)/(t2-t1), (a3-a2)/(t3-t2), … (ai-ai-1)/(ti-ti-1), … (an-an-1)/(tn-tn-1)], представляющий скорость изменения усилия, в котором каждый элемент относится к скорости изменения усилия в течение двух соседних отсчетов.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап определения содержит следующее: идентифицируют элемент, начиная с первого элемента в первом массиве F, который впервые удовлетворяет следующим условиям:
- значение идентифицированного элемента достигает или превосходит первое заданное значение усилия;
- среди нескольких элементов в третьем массиве dF, которые равны или близки к соответствующему элементу в третьем массиве dF, имеется элемент, значение которого достигает или превосходит первое значение скорости изменения усилия, причем соответствующий элемент в третьем массиве dF относится к скорости изменения усилия в тот момент времени, когда считан идентифицированный элемент в первом массиве F;
а затем определяют момент времени во втором массиве Т, соответствующий идентифицированному элементу из первого массива F, как момент времени замыкания автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап определения содержит следующее: идентифицируют элемент, начиная с первого элемента в первом массиве F, который впервые удовлетворяет следующим условиям:
- значение идентифицированного элемента меньше или равно второму заданному значению усилия;
- среди нескольких элементов в третьем массиве dF, которые равны или близки к соответствующему элементу в третьем массиве dF, имеется элемент, абсолютное значение которого достигает или превосходит второе значение скорости изменения усилия, причем соответствующий элемент в третьем массиве dF относится к скорости изменения усилия в тот момент времени, когда считан идентифицированный элемент в первом массиве F;
а затем определяют момент времени во втором массиве Т, соответствующий идентифицированному элементу из первого массива F, как момент времени размыкания автоматического выключателя.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап получения содержит следующее: получают профиль значения характеристического усилия с течением времени; а этап определения содержит следующее: определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения профиля.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, этап определения содержит следующее: обрабатывают профиль с помощью вейвлет-преобразования и определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения в обработанном профиле.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, вейвлет-преобразование основано на функции Хаара.
В соответствии с одним аспектом вариантов осуществления настоящего изобретения, также предложено устройство для мониторинга автоматического выключателя. Автоматический выключатель содержит приводной механизм для выполнения замыкания и размыкания подвижного контакта автоматического выключателя. Устройство содержит: средство получения характеристического усилия, связанного с приводным механизмом с течением времени; и средство определения момента времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения усилия. Средство определения также выполнено с возможностью определять момент, когда происходит увеличение характеристического усилия, как момент времени замыкания автоматического выключателя, и определять момент, когда происходит снижение характеристического усилия, как момент времени размыкания автоматического выключателя.
Краткое описание чертежей
При чтении последующего подробного описания примеров осуществления изобретения со ссылкой на чертежи становятся очевидными цель, признаки и преимущества настоящего изобретения.
На фиг. 1 показан пример автоматического выключателя, непрерывный мониторинг которого можно осуществлять способом в соответствии с вариантом осуществления настоящего изобретения.
На фиг. 2 показано усилие, оказываемое на рычажный механизм автоматического выключателя, изображенного на фиг. 1.
На фиг. 3 показана блок-схема последовательности операций способа мониторинга автоматического выключателя в соответствии с принципом настоящего изобретения.
На фиг. 4 показана блок-схема последовательности операций способа мониторинга момента времени замыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения.
На фиг. 5 показана блок-схема последовательности операций способа мониторинга момента времени размыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения.
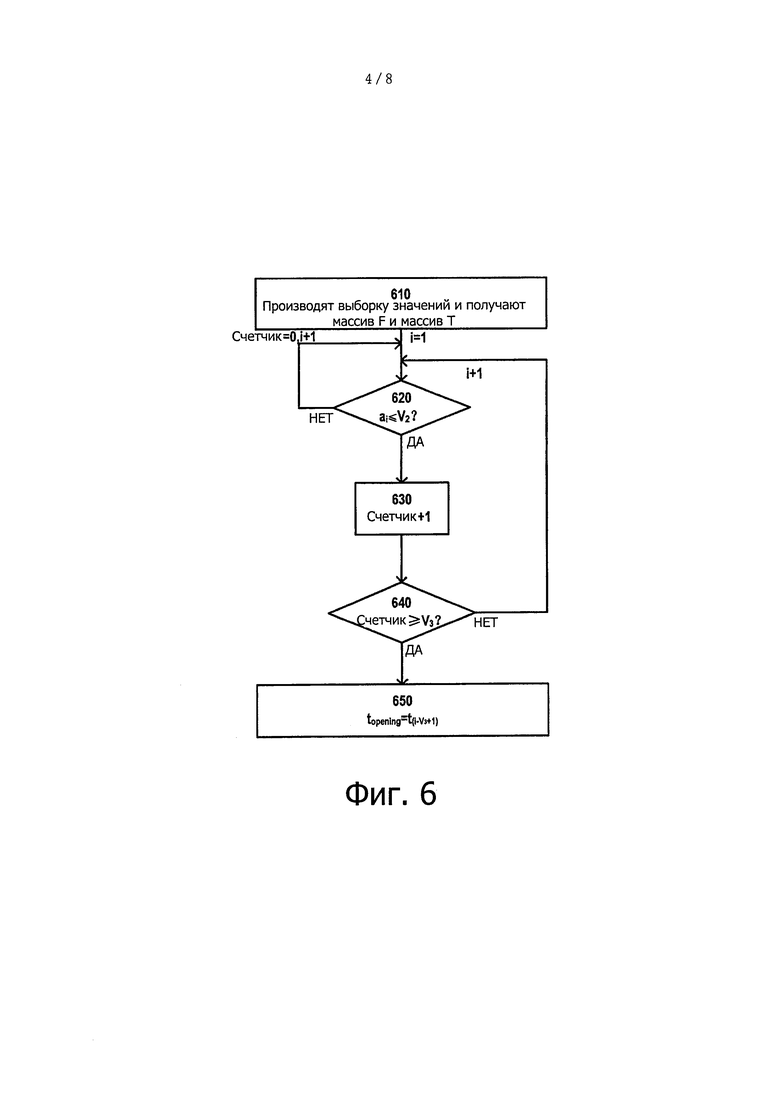
На фиг. 6 показана блок-схема последовательности операций способа мониторинга момента времени размыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения.
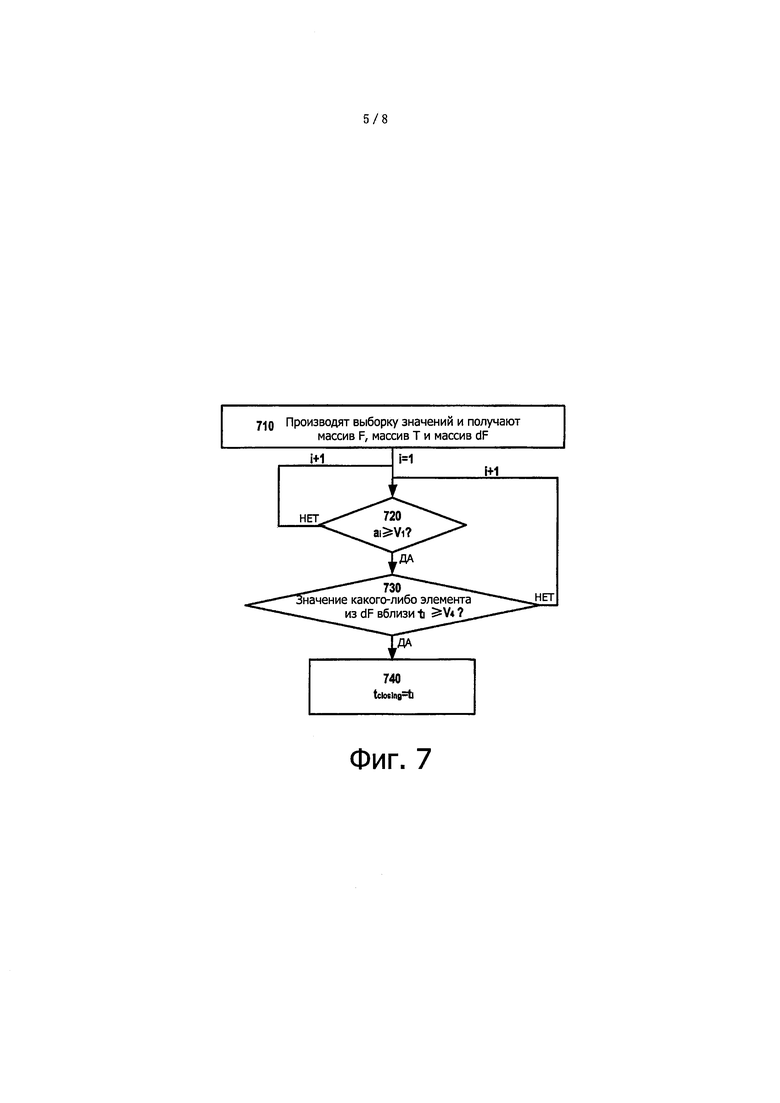
На фиг. 7 показана блок-схема последовательности операций способа мониторинга момента времени замыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения.
На фиг. 8 показана блок-схема последовательности операций способа мониторинга момента времени размыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения.
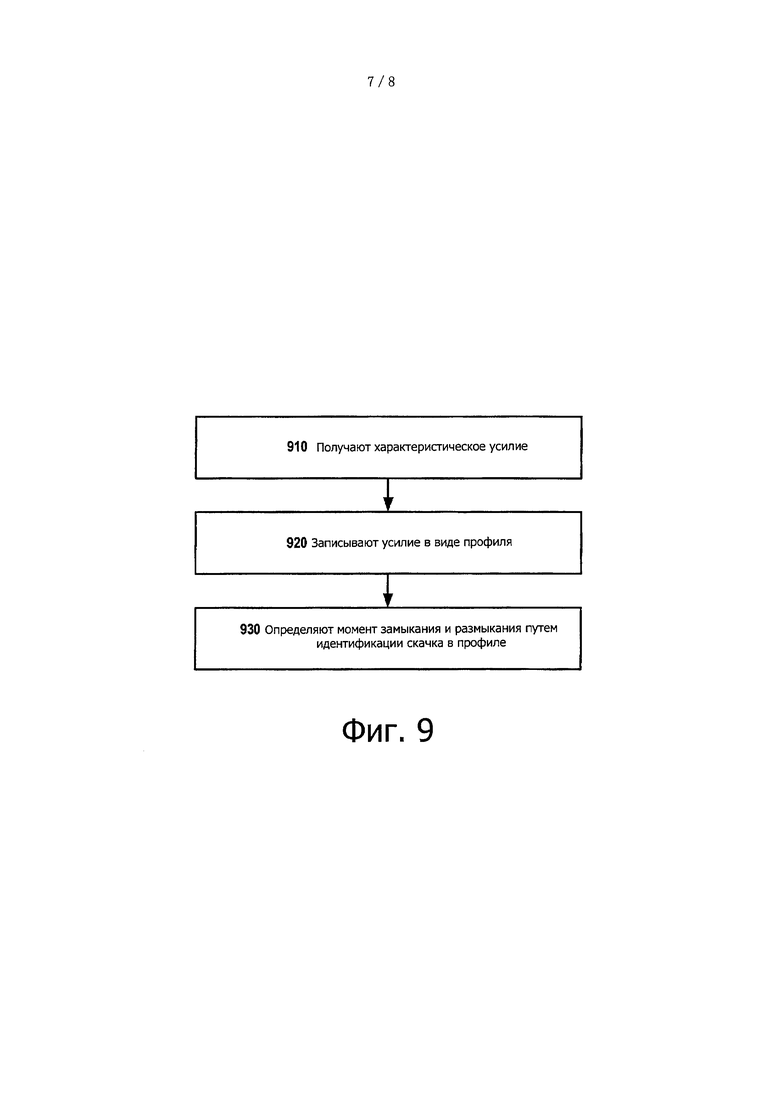
На фиг. 9 показана блок-схема последовательности операций способа мониторинга момента времени замыкания и размыкания автоматического выключателя в соответствии с другим вариантом осуществления настоящего изобретения.
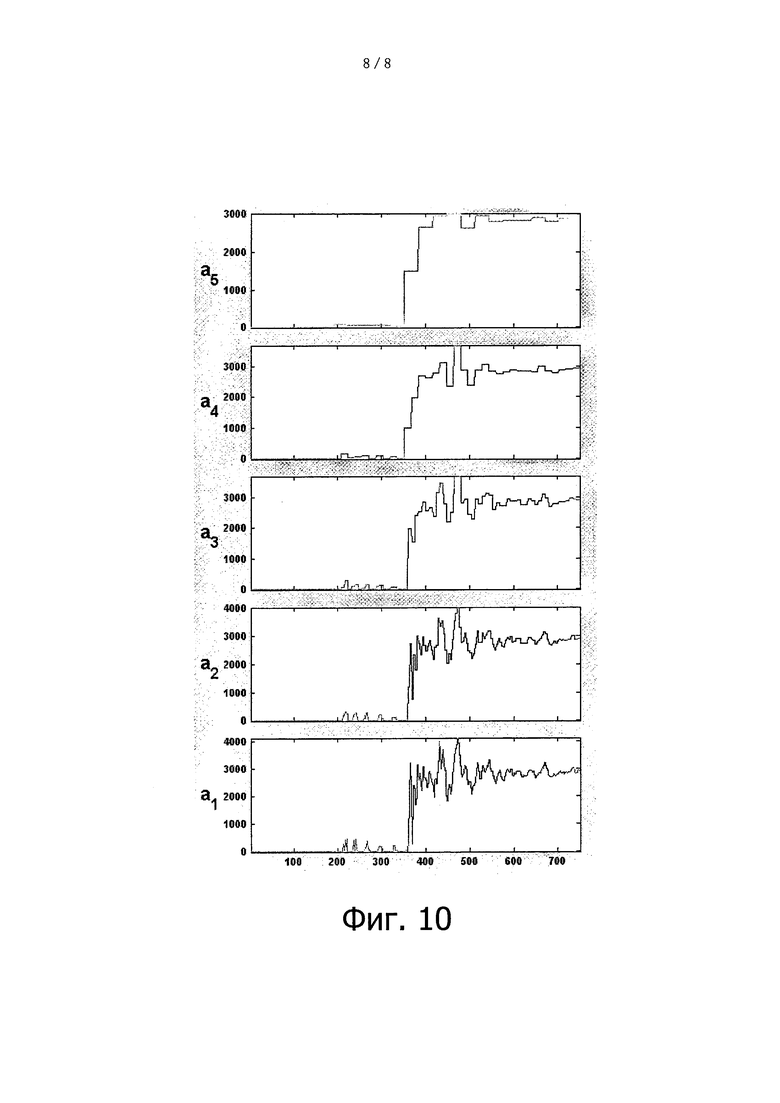
На фиг. 10 показан исходный профиль и обработанные профили характеристического усилия с течением времени.
Подробное описание вариантов осуществления изобретения
Далее при описании основной идеи и сущности настоящего изобретения будем обращаться к примерам осуществления изобретения. Следует понимать, что эти варианты приведены только для того, чтобы специалистам в данной области техники было легче понять и, в свою очередь, реализовать настоящее изобретение, а не для ограничения каким-либо образом объема настоящего изобретения.
Здесь, на примерах со ссылкой на чертежи подробно описаны различные варианты осуществления настоящего изобретения.
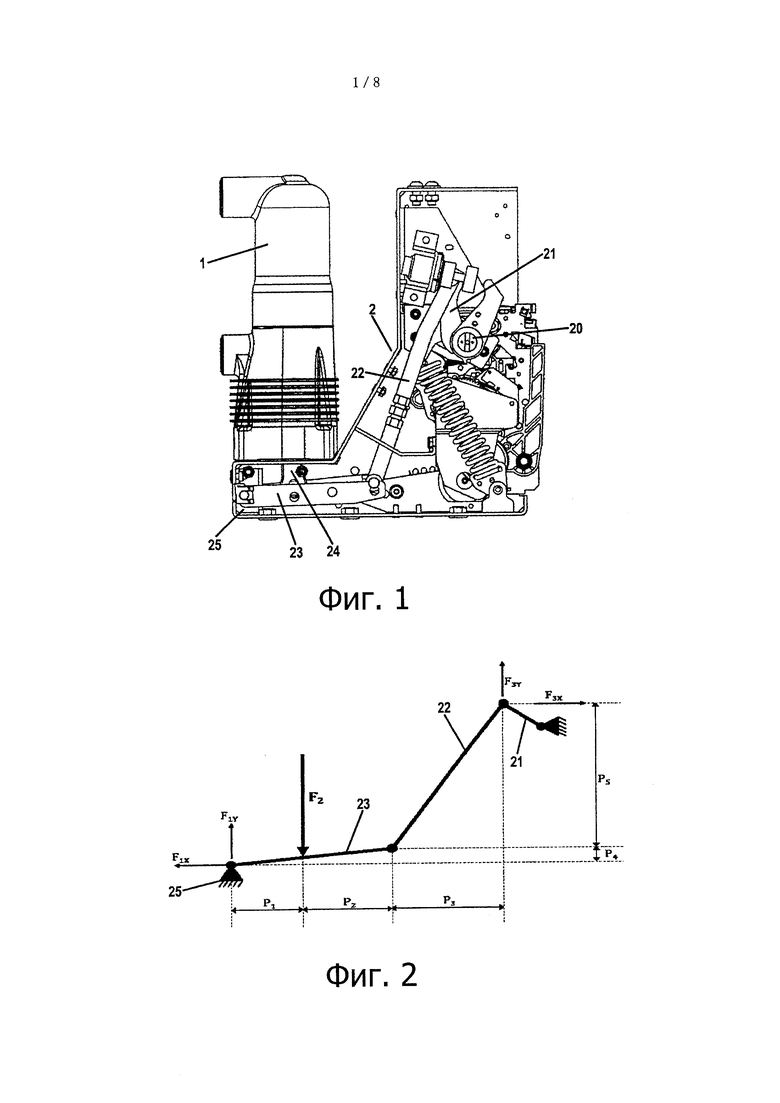
На фиг. 1 показан пример автоматического выключателя, непрерывный мониторинг которого можно осуществлять способом в соответствии с вариантом осуществления настоящего изобретения. Автоматический выключатель такой, как показанный на фиг. 1, представляет собой высоковольтный автоматический выключатель, содержащий неподвижный контакт и подвижный контакт (не показаны), заключенные в изоляционной трубке 1, и приводной механизма 2, предназначенный для выполнения замыкания и размыкания подвижного контакта. Приводной механизм 2 обычно представляет собой рычажный механизм для передачи приводного усилия от активного элемента, например, мотора или пружинного привода, на подвижный контакт. Как показано на фиг. 1, рычажный механизм содержит первый рычаг 21, второй рычаг 22, третий рычаг 23, последовательно соединенные один с другим с возможностью поворота. Первый рычаг 21 соединен с приводным валом 20, приводимым в действие активным элементом, а третий рычаг 23 соединен с возможностью поворота с опорой 25 на основании автоматического выключателя. Толкающий стержень 24 одним концом соединен с возможностью поворота с подвижным контактом на расстоянии от осевой точки поворота между третьим рычагом 23 и опорой 25. Другой конец толкающего стержня 24 соединен с подвижным контактом в изоляционной трубке 1. Путем приведения в действие приводного вала 20, который вращает мотор или пружина, подвижный контакт может быть перемещен вверх и вниз в продольном направлении в трубке 1 посредством передачи усилия от первого рычага 21, второго рычага 22, третьего рычага 23 и толкающего стержня 24, так чтобы контактировать с неподвижным контактом или отделяться от него и, таким образом, чтобы замыкать или размыкать цепь.
Так как внутри изолирующей трубки 1 имеют место неблагоприятные условия, включающие в себя высокое напряжение, сильное магнитное поле и образование дуги между контактами, будет непрактично размещать электронные датчики возле контактов для считывания параметра контактов для определения момента времени, когда подвижный контакт только замыкается или размыкается во время действия замыкания или размыкания. Дребезг подвижного контакта во время замыкания и размыкания также увеличивает сложность определения точного момента времени замыкания или размыкания подвижного контакта на основе любых возможных измеренных данных. Настоящее изобретение основано на идее, которая заключается в том, что из-за изменения взаимодействия неподвижного контакта с подвижным контактом во время замыкания и размыкания автоматического выключателя произойдет значительное изменение усилия, в виде переходного состояния, на подвижный контакт и приводной механизм.
На фиг. 2 показано усилие, оказываемое на рычажный механизм автоматического выключателя, изображенного на фиг. 1. В равновесном замкнутом состоянии автоматического выключателя подвижный контакт упирается в неподвижный контакт под действием усилия от рычажного механизма. В этом случае неподвижный контакт будет оказывать противодействующее усилие F2 (также называемое контактным усилием) на подвижный контакт, который, в свою очередь, подведен к третьему рычагу 23 через толкающий стержень 24. Как только подвижный контакт отделяют от неподвижного контакта во время размыкания, противодействующее усилие F2, действующее на подвижный контакт, толкающий стержень 24 и третий рычаг 23, существенно снизится и даже станет равным нулю. Аналогично, во время замыкания автоматического выключателя противодействующее усилие F2, оказываемое неподвижным контактом на подвижный контакт, существенно возрастет от нуля до сравнительно высокого значения. Оказывается, что изменение противодействующего усилия F2, действующего на толкающий стержень 24 или третий рычаг 23, может служить в качестве характеристики, отражающей процесс замыкания и размыкания автоматического выключателя. Более того, можно обоснованно предположить, что в момент времени, когда подвижный контакт только начинает касаться неподвижного контакта, впервые возникнет первое переходное увеличение значения противодействующего усилия F2 во время замыкания; а в момент времени, когда подвижный контакт только начинает отделяться от неподвижного контакта, впервые возникнет первое переходное снижение значения противодействующего усилия F2 во время размыкания.
Исходя из вышеприведенных наблюдений, предпочтительно определить момент времени замыкания и размыкания автоматического выключателя путем идентификации изменения противодействующего усилия F2.
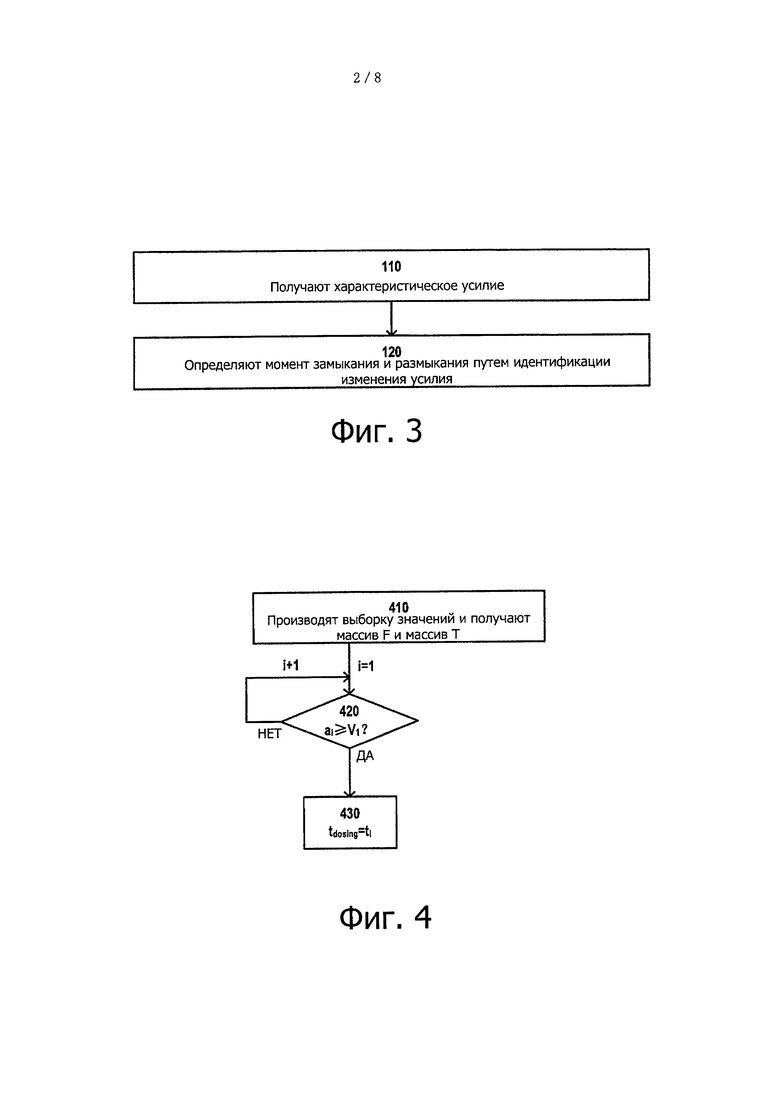
Со ссылкой на фиг. 3, в соответствии с вариантом осуществления настоящего изобретения, предложен способ мониторинга автоматического выключателя. Способ содержит следующие этапы: получают (110) характеристическое усилие, связанное с приводным механизмом (в этом варианте, контактное усилие, которое непосредственно оказывает подвижный контакт автоматического выключателя на рычажный механизм приводного механизма); и определяют (120) момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения усилия. В частности, соответствующий момент времени, когда происходит увеличение характеристического усилия, определяют в качестве момента времени замыкания автоматического выключателя; а когда происходит снижение характеристического усилия, соответствующий момент времени определяют в качестве момента времени размыкания автоматического выключателя.
Контактное или противодействующее усилие F2 можно измерить в различных позициях. Например, контактное усилие F2 можно измерить на толкающем стержне 24 с помощью датчика усилия, расположенного на толкающем стержне 24. Датчик усилия может представлять собой тензодатчик, такой как фольговый тензодатчик, подключенный к измерительной цепи, которая может измерить натяжение в том месте, где расположен фольговый тензодатчик, используя изменение сопротивления фольги при натяжении. Чтобы усилить натяжение толкающего стержня 24 для упрощения измерения, на толкающем стержне 24 там, где прикреплен тензодатчик, могут быть выполнены некоторые упругие конструктивные элементы, например, несколько пазов. Эти упругие конструктивные элементы увеличивают скорость деформации толкающего стержня 24 там, где прикреплен тензодатчик, так что натяжение вследствие контактного усилия F2 можно усилить, и, таким образом, его легче точно измерить. С помощью измерительной схемы, соединенной с тензодатчиком, можно вычислить контактное усилие F2 на основе измеренного натяжения и известной скорости деформации.
В одном варианте осуществления изобретения контактное усилие F2 также можно измерить в положении на третьем рычаге 23, где толкающий стержень 24 соединен с третьим рычагом 23, либо на оси вращения, соединяющей толкающий стержень 24 и третий рычаг 23. Все эти места изолированы и находятся вдали от подвижного контакта, так что на измерение не окажут существенного негативного влияния неблагоприятные условия в изолирующей трубке 1, и предотвращается негативное воздействие неблагоприятных условий на измерительное средство и возможные его повреждения от них.
Также со ссылкой на фиг. 2 в равновесном замкнутом состоянии на рычажный механизм также воздействуют другие усилия, такие как противодействующее усилие от внешних опорных конструкций и усилие взаимодействия от смежных рычагов. Например, если взять второй рычаг 22 и третий рычаг 23 в качестве системы, то в дополнение к противодействующему усилию F2 на эту систему также воздействуют следующие силы: на конец третьего рычага 23, соединенный с опорой 25, действует противодействующее усилие F1 от опоры 25, которое можно разделить на компоненту F1x перпендикулярную направлению контактного усилия F2 и компоненту F1y, действующую в направлении контактного усилия F2; на конец второго рычага 22, соединенный с первым рычагом 21, воздействует действующее усилие F3 от первого рычага 21, которое можно разделить на компоненту F3x перпендикулярную направлению контактного усилия F2 и компоненту F3y, действующую в направлении контактного усилия F2. В сбалансированном замкнутом состоянии система, содержащая второй рычаг 22 и третий рычаг 23, должна удовлетворять следующим трем условиям равновесия, чтобы удерживаться в статичном состоянии равновесия: результирующее усилие в направлении X (направлении перпендикулярном контактному усилию F2), оказываемое системой, равно нулю; результирующее усилие в направлении Y (направлении контактного усилия F2), оказываемое системой, равно нулю; и результирующее усилие, оказываемое каждым рычагом в системе, равно нулю.
Исходя из вышеприведенных трех условий, можно получить следующие три уравнения:
F1x=F3x;
F1y+F3y=F2;
F3Y⋅P2=F3x⋅P5;
F2⋅P1+F3x⋅P4=F3y⋅(P1+P2).
где: параметры P1, Р2, Р3, Р4 и Р5 обозначают расстояния, отмеченные на фиг. 2.
После преобразования вышеприведенных уравнений получаем:

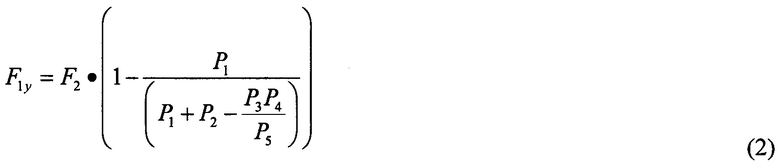


Из вышеприведенных результатов (1)-(4) следует, что в предположении, что все расстояния Р1-Р5 являются постоянными, все усилия F1x, F1y, F3x и F3y линейно соотносятся с контактным усилием F2. Учитывая довольно небольшие изменения расстояний Р1-Р5 во время очень небольшого перемещения подвижного контакта в течение короткого периода замыкания или размыкания, во время которого подвижный контакт почти касается или отходит от неподвижного контакта, усилия F1x, F1y, F3x и F3y можно считать приблизительно линейно связанными с контактным усилием F2 в течение периода времени, когда подвижный контакт почти касается или отходит от неподвижного контакта. В этом случае изменение усилий F1x, F1y, F3x и F3y также можно использовать для отражения изменения контактного усилия F2 и, таким образом, для отражения процесса замыкания и размыкания автоматического выключателя.
В одном варианте осуществления изобретения, получая любое из усилий F1x, F1y, F3x и F3y, и беря любое из усилий F1x, F1y, F3x и F3y в качестве характеристического усилия, и идентифицируя изменение любого из усилий F1x, F1y, F3x и F3y, также можно определить момент времени замыкания и размыкания автоматического выключателя.
В одном варианте осуществления изобретения также можно дополнительно измерить расстояния Р1-Р5 в равновесном замкнутом состоянии подвижного контакта и вычислить контактное усилие F2 с помощью любых из измеренных усилий F1x, F1y, F3x и F3y и расстояний Р1-Р5 с использованием вышеприведенных результатов (1)-(4). После этого, вычисленное контактное усилие F2 также можно использовать в качестве характеристического усилия для определения момента времени замыкания и размыкания автоматического выключателя, как было описано выше.
На самом деле, контактное усилие F2 может воздействовать на весь рычажный механизм или любой другой возможный приводной механизм автоматического выключателя. Любое усилие, приложенное к рычажному механизму или оказываемое рычажным механизмом, изменится в ответ на изменение контактного усилия F2. Поэтому в теории, любое усилие, связанное с рычажным механизмом, можно использовать в качестве характеристического усилия, чтобы непосредственно его измерить и использовать для определения момента замыкания и размыкания. Усилие, которое можно использовать в качестве характеристического усилия, представляет собой, по меньшей мере, следующее:
- контактное усилие F2;
- внутреннее усилие, оказываемое любым рычагом рычажного механизма приводного механизма;
- результирующее усилие, оказываемое каждым концом любого рычага рычажного механизма;
- компонента результирующего усилия, оказываемого каждым концом любого рычага рычажного механизма, причем эта компонента действует в направлении контактного усилия;
- компонента результирующего усилия, оказываемого каждым концом любого рычага рычажного механизма, причем эта компонента действует в направлении перпендикулярном контактному усилию;
- результирующее усилие, оказываемое любой осевой точкой рычажного механизма;
- компонента результирующего усилия, оказываемого любой осевой точкой рычажного механизма, причем эта компонента действует в направлении контактного усилия;
- компонента результирующего усилия, оказываемого любой осевой точкой рычажного механизма, причем эта компонента действует в направлении перпендикулярном контактному усилию.
Чтобы измерить усилие, оказываемое на рычажный механизм или рычажным механизмом, тензодатчик должен быть прикреплен на соответствующих местах. Например, тензодатчик может быть прикреплен на любой рычаг вдоль продольного направления рычага, чтобы измерять внутреннее напряжение на рычаге; тензодатчик может быть прикреплен на конец любого рычага, чтобы измерять усилие (компоненту X, компоненту Y или результирующее усилие), оказываемое на конец рычага другими соединенными с ним деталями. Предпочтительно прикреплять тензодатчик на любую осевую точку (например, опору 25), чтобы измерить усилие, оказываемое рычажным механизмом, которое имеет такое же значение, что и усилие, оказываемое на рычажный механизм в той же точке, и которое также можно использовать для определения момента замыкания и размыкания. Так как тензодатчик прикрепляют к неподвижной конструкции (осевой точке), то тензодатчик не будет перемещаться, так что его можно прикрепить более прочно, и точность измерения будет выше без негативного влияния перемещения тензодатчика. Чтобы усилить натяжение для повышения точности измерения, также можно выполнить упругие конструктивные элементы, упомянутые выше, в любом месте, где прикреплен тензодатчик, включая любой рычаг и любую осевую точку.
Чтобы точно отразить изменение контактного усилия F2, другие усилия, выступающие в качестве характеристического усилия, должны обладать высокой линейностью и чувствительностью в отношении контактного усилия F2. Как правило, усилие в направлении противодействующего усилия F2 должно обладать большей линейностью и чувствительность в отношении противодействующего усилия F2 по сравнению с усилиями в других направлениях. Для рычажного механизма, показанного на фиг. 2, Y-компонента F1y противодействующего усилия F1 и Y-компонента действующего усилия F3 действуют в направлении противодействующего усилия F2 и обладают высокой линейностью и чувствительностью в отношении противодействующего усилия F2. Поэтому, предпочтительно непосредственно измерять усилие F1y или F3y в качестве характеристического, чтобы определить момент замыкания и размыкания. Экспериментальные результаты показывают, что усилие F1y обладает более высокой линейностью и чувствительностью по сравнению с F3y. В этой связи, также предпочтительно прикреплять тензодатчик на опору 25, чтобы измерять F1y в качестве характеристического усилия.
Также можно вычислить контактное усилие F2 с использованием любого упомянутого выше усилия и взять вычисленное контактное усилие в качестве характеристического усилия. Чтобы вычислить контактное усилие F2 из рычажного механизма или другого приводного механизма следует выбрать подходящую систему, которая будет обсуждаться. Система может содержать более двух рычагов. Необходимо гарантировать, что исходя из условий равновесия сил и равновесия крутящих моментов, можно получить упомянутые выше уравнения, и все усилия в уравнениях (включая контактное усилие F2) можно получить, решая уравнения.
Ниже будут описаны различные специальные варианты осуществления изобретения для мониторинга моментов замыкания и размыкания.
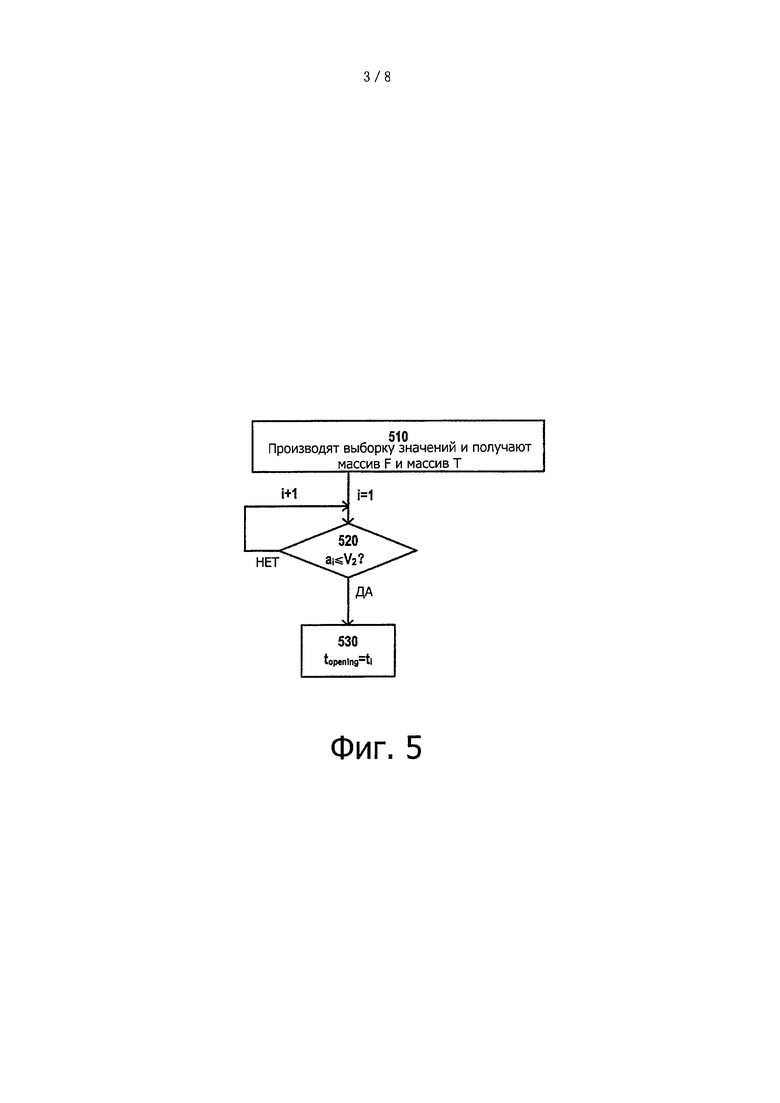
На фиг. 4 показана блок-схема последовательности операций способа мониторинга момента времени замыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения. Сначала проводят выборку 410 некоторого числа значений характеристического усилия (например, контактного усилия F2, измеренного непосредственно или вычисленного из других измеренных усилий, или других измеренных характеристических усилий) в различные моменты времени от начального момента, и, таким образом, получают 410 первый массив F [a1, а2, … ai, … аn], представляющий значения характеристического усилия в моменты выборки, и второй массив Т [t1, t2, … ti, … tn], представляющий соответствующие моменты выборки, причем "ai" - это значение отобранного характеристического усилия для i-го момента времени, "n" - число отсчетов, "ti" - момент времени для i-го отсчета.
Начальный момент - это обычно момент времени, когда команду на замыкание отправляют из управляющей цепи. Интервал отсчетов или частота зависит от требований к точности момента замыкания и размыкания. Например, интервал отсчетов может быть установлен равным 1,33 мкс. Процесс замыкания или размыкания может длиться в течение 100 мс с момента отправления команды. В результате, в соответствии с интервалом отсчетов 1,33 мкс размер "n" выборки составит 752 за весь период замыкания или размыкания.
Затем сравнивают 420 ai в первом массиве F с первым заданным значением V1 усилия, начиная с первого элемента a1 в массиве F. Первое заданное значение V1 усилия устанавливают в соответствии с конкретной конструкцией автоматического выключателя и выбранным характеристическим усилием. Первое заданное значение V1 усилия следует задавать достаточно большим, чтобы отличить его от шума перед действительным контактом между неподвижным и подвижным контактами, но не больше, чем действительное контактное усилие между ними в начале замыкания. Если взять контактное усилие F2 в качестве характеристического усилия, то первое заданное значение V1 усилия можно задать от 500 Н до 6000 Н.
Если значение первого элемента ai не достигает и не превосходит первое заданное значение V1 усилия, то повторяют этап 420 сравнивания для следующего элемента ai в первом массиве F до первого элемента ai в первом массиве F, значение которого достигает или превосходит первое заданное значение V1 усилия. Тогда определяют 420 момент ti времени во втором массиве Т, соответствующий идентифицированному элементу ai из первого массива F, как момент tclosing времени замыкания автоматического выключателя. Первое большое изменение величины характеристического усилия с начального момента отражает первое касание между подвижным и неподвижным контактами. Фактически, найден момент замыкания.
На фиг. 5 показана блок-схема последовательности операций способа мониторинга момента времени размыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения. В этом способе этап 510 выборки значений характеристического усилия и получения первого массива F [a1, а2, … ai, … аn] и второго массива Т [t1, t2, … ti, … tn] выполняют также, как и этап 410 выборки и получения в способе мониторинга замыкания, показанном на фиг. 4. Единственное отличие заключается в том, что начальный момент для проведения выборки на этапе 510 обычно представляет собой момент времени, когда команду на размыкание отправляют из управляющей цепи. Этап 520 сравнения и этап 520 выполнения цикла аналогичен этапу 420 сравнения и выполнения цикла на фиг. 4. Единственное отличие заключается в том, что условие для принятия решения представляет собой проверку того, является ли значение ai меньше или равным второму заданному значению V2 усилия.
Второе заданное значение V2 усилия следует задавать достаточно малым, чтобы оно было существенно меньше, чем значение в замкнутом состоянии. Если взять контактное усилие F2 в качестве характеристического усилия, то второе заданное значение V2 усилия можно задать даже близким к нулю.
Как только идентифицирован первый элемент ai в первом массиве F, для которого значение элемента ai меньше или равно второму заданному значению V2 усилия, то переходят на этап 520, определяют момент ti во втором массиве Т, соответствующий идентифицированному элементу ai из первого массива F, как момент topening размыкания автоматического выключателя. Первое большое изменение величины характеристического усилия с начального момента отражает первое отделение подвижного контакта от неподвижного контакта. Фактически, найден момент размыкания.
На фиг. 6 показана блок-схема последовательности операций способа мониторинга момента времени размыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения. В этом способе этап 610 выборки значений характеристического усилия и получения первого массива F [a1, а2, … ai, … аn] и второго массива Т [t1, t2, … ti, … tn] выполняют так же, как и этап 510 считывания и получения в способе мониторинга размыкания, показанном на фиг. 5. Этап 620 сравнения и этап 620 выполнения цикла аналогичен этапу 520 сравнения и выполнения цикла на фиг. 5. Отличие заключается в том, что имеется Счетчик, предназначенный для того, чтобы накапливать 630 число раз, когда ai меньше или равен второму заданному значению V2. С другой стороны, как только элемент ai не удовлетворяет условию, заключающемуся в том, что ai меньше или равен второму заданному значению V2, Счетчик сбрасывают в нулевое значение. После увеличения значения Счетчика на единицу принимают 640 решение о том, является ли значение Счетчика больше или равно заданному числу V3, например, 20. Если нет, то выполняют цикл 620 для следующего ai в первом массиве F; если да, то определяют момент t(i-v3+1) времени во втором массиве Т в качестве момента времени topening размыкания автоматического выключателя, причем момент t(i-v3+1) времени представляет собой момент, начиная с которого имеется V3 следующих друг за другом элементов в первом массиве F впервые с начального момента, при этом каждый из V3 следующих друг за другом элементов меньше или равен второму заданному значению V2.
Этот способ, как показано на фиг. 6, гарантирует, что, начиная с полученного момента размыкания, по меньшей мере некоторое время характеристическое усилие имеет небольшое значение, которое меньше или равно второму заданному значению V2, без какого-либо дребезга. В связи с этим, полученный момент размыкания можно рассматривать как действительный момент размыкания, после него не должно быть какого-либо соприкосновения между подвижным и неподвижным контактами вследствие дребезга подвижного контакта, что означает, что подвижный контакт достиг стабильного разомкнутого состояния.
На фиг. 7 показана блок-схема последовательности операций способа мониторинга момента времени замыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения. В этом способе этап 710 выборки значений характеристического усилия и получения первого массива F [a1, а2, … ai, … аn] и второго массива Т [t1, t2, … ti, … tn] выполняют аналогично этапу 410 считывания и получения в способе мониторинга замыкания, показанном на фиг. 4. Отличие заключается в том, что на этапе 710 получения также получают третий массив dF [(a2-a1)/(t2-t1), (a3-a2)/(t3-t2), … (ai-ai-1)/(ti-ti-1), … (an-an-1)/(tn-tn-1)], представляющий скорость изменения усилия, в котором каждый элемент относится к скорости изменения усилия в течение двух соседних отсчетов. Этап 720 сравнения и этап 720 выполнения цикла аналогичен этапу 420 сравнения и выполнения цикла на фиг. 4.
Как только элемент ai удовлетворяет условию, заключающемуся в том, что значение элемента ai достигает или превосходит первое заданное значение V1 усилия на этапе 720, то переходят на этап 730, чтобы сравнить скорость изменения усилия в третьем массиве dF с первым заданным значением V4 скорости изменения усилия. Сам по себе этап 730 представляет собой цикл. Выбирают несколько элементов из третьего массива dF для выполнения цикла 730. Выбор нескольких элементов основан на соответствующем элементе ((ai-ai-1)/(ti-ti-1)) в третьем массиве dF, который относится к скорости изменения усилия в момент времени, когда отобран идентифицированный элемент ai в первом массиве F. Несколько выбранных элементов могут содержать соответствующий элемент ((ai-ai-1)/(ti-ti-1)), несколько следующих друг за другом элементов, смежных и стоящих перед соответствующим элементом ((ai-ai-1)/(ti-ti-1)), например, 5 элементов, и несколько следующих друг за другом элементов, смежных и стоящих после соответствующего элемента ((ai-ai-1)/(ti-ti-1)), например, 5 элементов. На этапе 730 выбранные несколько элементов из третьего массива dF в любом порядке соответственно сравнивают с первым заданным значением V4 скорости изменения усилия, чтобы проверить, имеется ли по меньшей мере один элемент, значение которого достигает или превосходит первое заданное значение V4 скорости изменения усилия. Этот этап 730 используют для проверки того, имеется ли изменение усилия возле момента времени, когда впервые отбирается большая величина характеристического усилия. Первое заданное значение V4 скорости изменения усилия можно задать в зависимости от интервала отсчетов и выбранного характеристического усилия. Если взять контактное усилие F2 в качестве характеристического усилия, то первое заданное значение V4 скорости изменения усилия можно задать от 3000 Н/мс до 7000 Н/мс.
Если ни один элемент из выбранных нескольких элементов не удовлетворяет условию на этапе 730, что означает, что изменения усилия нет, то возвращаются на этап 720, чтобы найти следующий элемент ai в первом массиве F, который удовлетворяет условию на этапе 720.
Если имеется по меньшей мере один элемент из нескольких выбранных элементов, который удовлетворяет условию на этапе 730 для текущего идентифицированного элемента ai в первом массиве F, то переходят на этап 740, определяют момент ti времени во втором массиве Т, соответствующий идентифицированному элементу аi из первого массива F как момент времени tclosing замыкания автоматического выключателя. Фактически, найден момент замыкания.
На фиг. 8 показана блок-схема последовательности операций способа мониторинга момента времени размыкания автоматического выключателя в соответствии с вариантом осуществления настоящего изобретения. В этом способе этап 710 выборки значений характеристического усилия и получения первого массива F [a1, а2, … ai, … аn], второго массива Т [t1, t2, … ti, … tn] и третьего массива dF [(a2-a1)/(t2-t1), (a3-a2)/(t3-t2), … (ai-ai-1)/(ti-ti-1), … (an-an-1)/(tn-tn-1)] выполняют аналогично этапу 710 выборки и получения в способе мониторинга замыкания, показанном на фиг. 7. Единственное отличие заключается в том, что начальный момент для выборки обычно представляет собой момент времени, когда команду на размыкание отправляют из управляющей цепи. Этап 820 сравнения и этап 820 выполнения цикла аналогичен этапу 720 сравнения и выполнения цикла на фиг. 7. Отличие заключается в том, что условие для принятия решения представляет собой проверку того, является ли значение ai меньше или равно второму заданному значению V2 усилия.
Как только элемент ai удовлетворяет условию, заключающемуся в том, что значение элемента ai меньше или равно второму заданному значению V2 усилия на этапе 820, то переходят на этап 830, чтобы сравнить скорость изменения усилия в третьем массиве dF со вторым заданным значением V5 скорости изменения усилия. Сам по себе этап 830 также представляет собой цикл, который аналогичен этапу 730 на фиг. 7. Способ выбора нескольких элементов из третьего массива dF такой же, что и этап 730 на фиг. 7. Отличие заключается в проверке условия на этапе 830. На этапе 830 абсолютные значения нескольких выбранных элементов из третьего массива dF в любом порядке соответственно сравнивают со вторым заданным значением V5 скорости изменения усилия, чтобы проверить, имеется ли по меньшей мере один элемент, абсолютное значение которого достигает или превосходит второе заданное значение V5 скорости изменения усилия. Так как изменение усилия во время размыкания автоматического выключателя будет происходить от высокого значения к низкому значению, то значение элемента (ai-ai-1)/(ti-ti-1) в третьем массиве dF в момент времени близкий к действительному моменту размыкания будет отрицательным. Поэтому, предпочтительно сравнивать абсолютное значение соответствующего элемента в третьем массиве dF со вторым заданным значением V5 скорости изменения усилия. В этой связи, второе заданное значение V5 скорости изменения усилия следует задавать положительным, например, от 3000 Н/мс до 7000 Н/мс, аналогично первому заданному значению V4 скорости изменения усилия.
Как и в способе, показанном на фиг. 7, если ни один элемент из выбранных нескольких элементов не удовлетворяет условию на этапе 830, что означает, что изменения усилия нет, то возвращаются на этап 820, чтобы найти следующий элемент ai в первом массиве F, который удовлетворяет условию на этапе 820.
Если имеется по меньшей мере один элемент из нескольких выбранных элементов, который удовлетворяет условию на этапе 830 для текущего идентифицированного элемента ai в первом массиве F, то переходят на этап 840, определяют момент ti времени во втором массиве Т, соответствующий идентифицированному элементу ai из первого массива F как момент времени topening размыкания автоматического выключателя. Фактически, найден момент размыкания.
В вышеприведенных вариантах осуществления изобретения отобранные значения оценивают многими способами последовательно одно за одним, исходя из порога величины и/или скорости изменения характеристического усилия, чтобы идентифицировать изменение усилия. Однако также можно использовать другие способы идентификации изменения посредством порога величины и/или скорости изменения характеристического усилия. Этапы в способах, обсуждавшихся выше, пригодны для выполнения с помощью электрических цепей или компьютерных программ, включающих в себя этапы вычисления, записи, сравнения, выполнения циклов и т.д.
На фиг. 9 показана блок-схема последовательности операций способа мониторинга момента времени замыкания и размыкания автоматического выключателя в соответствии с другим вариантом осуществления настоящего изобретения. В этом способе характеристическое условие получают 910 так же, как и в вышеприведенных вариантах, например, отбирают некоторое число значений характеристического усилия во время замыкания или размыкания с некоторым интервалом выборки. В отличие от вышеприведенных вариантов в этом варианте отобранные значения не записывают в массивы. Вместо этого полученные значения характеристического усилия записывают 920 с течением времени в виде профиля (см. профиль a1 на фиг. 10, показывающий записанный профиль в течение времени замыкания). Профиль может быть выполнен посредством выполняемой программы или известного программного обеспечения, такого как Matlab. Затем профиль может быть проанализирован с помощью исполняемой программы или известного программного обеспечения, такого как Matlab, чтобы автоматически идентифицировать 930 первое изменение характеристического усилия с течением времени. Программа или программное обеспечение может сканировать профиль, начиная с начального момента, и идентифицировать первое изменение в профиле в соответствии с характером профиля. Например, программа или программное обеспечение может анализировать наклон каждого участка профиля, чтобы установить, имеется ли изменение. Как только в профиле впервые с начального момента обнаружено изменение, момент времени (Х-координата профиля), соответствующий точке изменения, определяют как момент замыкания или размыкания автоматического выключателя.
В одном варианте осуществления изобретения перед идентификацией точки изменения в профиле записанный профиль обрабатывают математическим способом, например, с помощью программы или известного программного обеспечения, чтобы точку изменения в профиле было легче обнаружить. Например, профиль может быть обработан с помощью вейвлет-преобразования. Профили а2-а5 на фиг. 10 показывают обработанный с помощью различных вейвлет-преобразований профиль для исходного профиля a1. Видно, что профиль а5, полученный вейвлет-преобразованием с функцией Хаара, был обработан в виде квадратных волн, причем шум и помехи в исходном профиле можно отфильтровать. Передний край первой квадратной волны с помощью программы или программного обеспечения можно наиболее явно идентифицировать как первую точку изменения. В связи с этим, момент времени, соответствующий переднему краю первой квадратной волны, определяют в качестве момента времени замыкания автоматического выключателя. Понятно, что также можно использовать другие математические методы или способы обработки сигналов для обработки профиля, чтобы отфильтровать шум и упростить обнаружение точки изменения в профиле.
Для всех описанных вариантов осуществления настоящего изобретения точный момент замыкания или размыкания автоматического выключателя можно определить путем измерения характеристических усилий, связанных с контактным усилием F2, в месте на удалении от подвижного контакта. В результате, на измерительные электронные компоненты и процесс измерения не окажут негативного влияния неблагоприятные условия возле подвижного контакта, если автоматический выключатель работает в обычном режиме. Поэтому, способ в соответствии с вариантами осуществления настоящего изобретения можно использовать, чтобы непрерывно отслеживать автоматический выключатель без необходимости в безопасных условиях проведения исследований. Непрерывный мониторинг может отражать практические рабочие характеристики автоматического выключателя. По сравнению с мониторингом в отключенном состоянии или в условиях проведения испытаний непрерывный мониторинг более полезен для пользователя при изучении характеристик автоматического выключателя. Кроме того, так как непрерывный мониторинг не требует прерывания нормальной работы автоматического выключателя, то мониторинг можно проводить регулярно в течение длительного времени, что предпочтительно для эксплуатации автоматического выключателя.
На основе точного определения момента замыкания и размыкания автоматического выключателя также можно вычислить или вывести другие механические характеристики автоматического выключателя. Например, скорость замыкания и размыкания автоматического выключателя можно вычислить, исходя из начального момента отправления команды и полученного момента замыкания или размыкания. Кроме того, исходя из момента замыкания и размыкания, также можно получить зазор между контактами, ход контактной пружины автоматического выключателя. Поэтому, способы в соответствии с вариантами настоящего изобретения обеспечивают основу для точного мониторинга механических характеристик автоматического выключателя.
В настоящем изобретении также предложено устройство для мониторинга автоматического выключателя. Автоматический выключатель содержит приводной механизм для выполнения замыкания и размыкания подвижного контакта автоматического выключателя. Устройство содержит: средство получения характеристического усилия, связанного с приводным механизмом в течение времени; и средство определения момента времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения усилия. Устройство приспособлено для реализации любого из упомянутых выше способов.
Также понятно, что способы и устройство в соответствии с вариантами осуществления настоящего изобретения также приспособлены для различных видов автоматических выключателей, включая автоматические выключатели для высокого, среднего и низкого уровня напряжения, автоматические выключатели с различными приводными механизмами.
Более того, способы и устройство в соответствии с вариантами осуществления настоящего изобретения могут быть реализованы по-разному, включая программное обеспечение, аппаратное обеспечение, микропрограммное обеспечение или любое произвольное их сочетание. Например, в некоторых вариантах осуществления средство получения и средство определения могут быть реализованы программным и/или микропрограммным обеспечением. Как вариант или в качестве дополнения, средство получения и средство определения могут быть частично или полностью реализованы аппаратно. Например, средство получения и средство определения могут быть реализованы в виде интегральной схемы (ИС), специализированной интегральной микросхемы (ASIC), однокристальной системы (SoC), программируемой логической интегральной схемы (ПЛИС) и т.д. Объем настоящего изобретения не ограничен этим аспектом. В частности, в некоторых вариантах осуществления средство получения и средство определения могут быть реализованы в виде подключаемого программного модуля, устанавливаемого на устройство мониторинга, в виде компонента, как часть устройства мониторинга или в виде независимого устройства, работающего при взаимодействии с существующим устройством мониторинга другими способами.
Настоящее изобретение может представлять собой систему, способ и/или компьютерный программный продукт. Компьютерный программный продукт может включать в себя машинный носитель информации (или носители), на которых имеется считываемая компьютером программа, предназначенная для того, чтобы процессор выполнял аспекты настоящего изобретения.
Машинный носитель может представлять собой материальное устройство, на котором могут храниться команды, предназначенные для использования устройством выполнения команд. Машинный носитель, например, может представлять собой, но не ограничиваясь, электронное запоминающее устройство, магнитное запоминающее устройство, оптическое запоминающее устройство, электромагнитное запоминающее устройство, полупроводниковое запоминающее устройство, или любое подходящее сочетание вышеперечисленных. Неисчерпывающий список более конкретных примеров машинных носителей включает в себя следующее: портативная дискета, жесткий диск, память произвольного доступа (RAM), постоянная память (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флэш-память), статическая память с произвольным доступом (SRAM), переносимая постоянная память на оптическом диске (CD-ROM), универсальный цифровой диск (DVD), карта памяти, флоппи-диск, механически кодируемое устройство, такое как перфокарты или выступающие конструктивные элементы в пазу, на которых записаны команды, и любое подходящее сочетание вышеперечисленного. Под используемый здесь термином "машинный носитель" не следует рассматривать сами по себе временные сигналы, такие как радиоволны или другие свободно распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся через волновод или другую среду передачи (напр., световые импульсы, проходящие через оптоволоконный кабель) или электрические сигналы, передаваемые по проводу.
Описанные в этом документе команды компьютерной программы могут быть загружены на соответствующие вычислительные/обрабатывающие устройства с машинного носителя или на внешний компьютер или внешнее запоминающее устройство через сеть, например, Интернет, локальную сеть, глобальную сеть и/или беспроводную сеть. Сеть может содержать медные проводящие кабели, оптоволокно, беспроводную передачу, маршрутизаторы, межсетевые экраны, коммутаторы, шлюзовые компьютеры и/или пограничный серверы. Сетевая карта или сетевой интерфейс в каждом вычислительном/обрабатывающем устройстве принимает команды компьютерной программы из сети и направляет команды компьютерной программы для сохранения на машинном носителе в вычислительном/обрабатывающем устройстве.
Команды компьютерной программы для выполнения операций в соответствии с настоящим изобретением могут представлять собой команды ассемблера, команды архитектуры набора команд (ISA), машинные команды, машинно-зависимые команды, микрокод, микропрограммные команды, данные, задающие состояние, или любой исходный код или объектный код, написанный на любом сочетании одного или нескольких языков программирования, таких как Smalltalk, С++, и т.п. и процедурных языков программирования, таких как язык программирования "С" или аналогичных языков программирования. Команды компьютерной программы могут полностью выполняться на компьютере пользователя, частично на компьютере пользователя в виде отдельного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере, либо полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к пользовательскому компьютеру через сеть любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), либо может быть выполнено подключение к внешнему компьютеру (например, через Интернет с использованием поставщика услуг Интернет). В некоторых вариантах осуществления электронные схемы, включающие в себя, например, программируемые логические схемы, программируемые логические интегральные схемы (ПЛИС) или программируемые логические матрицы (ПЛМ), могут выполнять команды компьютерной программы, используя информацию о состоянии команд компьютерной программы для настройки электронных схем, чтобы выполнить аспекты настоящего изобретения.
Аспекты настоящего изобретения описаны в этом документе со ссылкой на графические представления и/или блок-схемы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Понятно, что каждый блок графических представлений и/или блок-схем и сочетания блоков на графических представлениях и/или блок-схемах могут быть реализованы командами компьютерной программы.
Эти команды компьютерных программ могут быть отправлены на процессор компьютера общего назначения, компьютер специального назначения или другое программируемое устройство обработки данных для создания машины, так что команды, исполняемые процессором компьютера или другого программируемого устройства обработки данных, создают средство для реализации функций/действий, заданных в блоке или блоках графического представления и/или блок-схемы. Эти команды компьютерной программы также могут быть сохранены на машинном носителе и могут управлять компьютером, программируемым устройством обработки данных и/или другими устройствами так, чтобы они функционировали определенным образом, так что машинный носитель информации, на котором хранятся команды, представляет собой готовое изделие, включающее в себя команды, которые реализуют аспекты функции/действия, заданного в блоке или блоках графического представления и/или блок-схемы.
Команды компьютерных программ также могут быть загружены на компьютер или другое программируемое устройство обработки данных, или другое устройство, чтобы вызвать выполнение последовательности этапов работы на компьютере, другом программируемом устройстве обработки данных или другом устройстве, чтобы реализовать вычислительный процесс, чтобы команды, выполняемые на компьютере, другом программируемом устройстве обработки данных или другом устройстве, реализовывали функции/действия, заданные в блоке или блоках графического представления и/или блок-схемы.
Графическое представление и блок-схемы на фигурах показывают архитектуру, функциональность и работу возможных реализаций систем, способов и компьютерных программных продуктов в соответствии с различными вариантами осуществления настоящего изобретения. В этой связи, каждый блок в графическом представлении или на блок-схемах может представлять модуль, сегмент или участок кода, который содержит одну или несколько исполняемых команд для реализации заданных логических функций. Следует отметить, что в некоторых альтернативных реализациях функции, отмеченные в блоке, могут оказаться в другом порядке, чем указано на фигурах. Например, два блока, показанных последовательно, в действительности могут быть выполнены по существу одновременно, либо блоки иногда могут быть выполнены в обратном порядке в зависимости от задействованной функциональности. Также следует отметить, что каждый блок на блок-схемах и/или графическом представлении и сочетания блоков на блок-схемах и/или графическом представлении могут быть реализованы аппаратными системами специального назначения, которые выполняют заданные функции или действия или комбинации команд специального аппаратного обеспечения и компьютерных команд.
Описания различных вариантов осуществления настоящего изобретения были представлены для иллюстрации, но не предполагается, что они являются исчерпывающими или ограниченными описанными вариантами осуществления. Специалистам в области техники будет очевидно множество модификаций, не отклоняясь от объема и сущности описанных вариантов осуществления. Используемая в этом документе терминология была выбрана для того, чтобы наилучшим образом объяснить принципы вариантов осуществления, практического применения или технического усовершенствования по сравнению с технологиями, присутствующими на рынке, или чтобы позволить другим специалистам в области техники понять описанные в этом документе варианты осуществления.
Изучая чертежи, описание вариантов осуществления настоящего изобретения и прилагаемую формулу изобретения, специалисты в области техники могут понять и реализовать другие модификации описанных вариантов осуществления при реализации настоящего изобретения. В формуле изобретения термин "содержащий" не исключает других элементов или этапов, а неопределенный артикль или термин "один" не исключает множественного числа. Простой факт иллюстрации отдельных элементов в зависимых пунктах формулы изобретения, которые отличаются друг от друга, не означает, что преимущественно не может быть использовано сочетание этих элементов. Обозначения в формуле изобретения не следует интерпретировать как ограничивающие ее объем.
Хотя настоящее изобретение было описано со ссылкой на рассмотренные в настоящее время варианты осуществления, следует понимать, что настоящее изобретение не ограничено описанными вариантами. Наоборот, предполагается, что настоящее изобретение охватывает различные модификации и эквивалентные устройства, попадающие под объем и сущность прилагаемой формулы изобретения. Объем прилагаемой формулы изобретения соответствует самому широкому толкованию и охватывает все такие модификации и эквивалентные структуры и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ КРИВОЙ ПЕРЕМЕЩЕНИЯ ПРЕРЫВАТЕЛЯ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2011 |
|
RU2582577C2 |
| Автоматический выключатель | 1974 |
|
SU531214A1 |
| Автоматический выключатель | 2017 |
|
RU2683244C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ИЗНОСА КОНТАКТОВ ВЫКЛЮЧАТЕЛЯ | 2002 |
|
RU2297065C2 |
| Автоматический выключатель | 1980 |
|
SU902099A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗМЫКАТЕЛЯ ДЛЯ РАЗРЯДНИКА ЗАЩИТЫ ОТ ПЕРЕНАПРЯЖЕНИЯ | 2007 |
|
RU2410781C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ С "ДУТЬЕВОЙ" СИСТЕМОЙ ДУГОГАШЕНИЯ | 2013 |
|
RU2598033C1 |
| Селективно-токоограничивающий автоматический выключатель | 1980 |
|
SU907629A1 |
| УСОВЕРШЕНСТВОВАННЫЕ ДИАГНОСТИЧЕСКИЕ РЕШЕНИЯ ДЛЯ ПЕРЕКЛЮЧАЮЩИХ УСТРОЙСТВ СРЕДНЕГО НАПРЯЖЕНИЯ | 2020 |
|
RU2809731C2 |
| РАЗМЫКАЮЩИЙ МОДУЛЬ И АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ТАКИМ МОДУЛЕМ | 2008 |
|
RU2378731C1 |

Предложенная группа изобретений относится к средствам для мониторинга автоматического выключателя. Способ мониторинга автоматического выключателя, содержащего рычажный приводной механизм, включает следующие этапы: получают характеристическое усилие на упоре шарнира указанного рычажного приводного механизма в течение времени; и определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения указанного усилия; при этом на этапе определения определяют момент, когда происходит увеличение характеристического усилия, в качестве момента замыкания автоматического выключателя; и определяют момент, когда происходит снижение характеристического усилия, в качестве момента размыкания автоматического выключателя. Указанный способ можно использовать для точного непрерывного мониторинга момента замыкания и размыкания автоматического выключателя. Данный способ реализуется при помощи соответствующего устройства. Предложенные изобретения обеспечивают повышение точности и надежности мониторинга контролируемого выключателя. 2 н. и 13 з.п. ф-лы, 10 ил.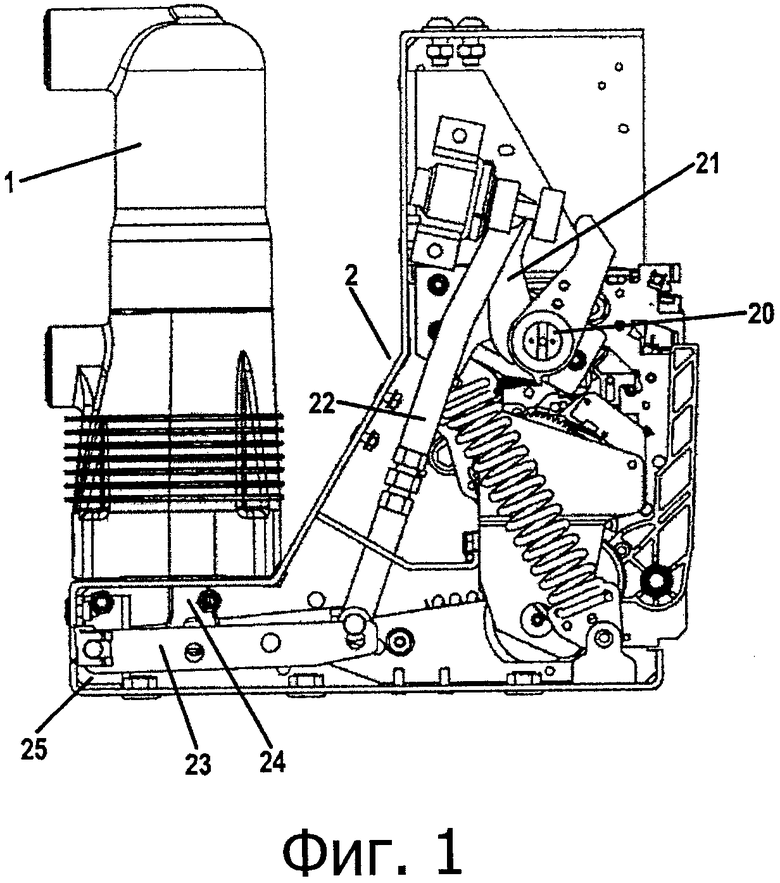
1. Способ мониторинга автоматического выключателя, причем автоматический выключатель содержит рычажный приводной механизм для выполнения замыкания и размыкания подвижного контакта автоматического выключателя; способ включает этапы, на которых:
получают характеристическое усилие на упоре шарнира указанного рычажного приводного механизма в течение времени; и
определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения указанного усилия;
при этом на этапе определения определяют момент, когда происходит увеличение характеристического усилия, в качестве момента замыкания автоматического выключателя; и определяют момент, когда происходит снижение характеристического усилия, в качестве момента размыкания автоматического выключателя.
2. Способ по п. 1, в котором указанное характеристическое усилие представляет собой любой из следующих параметров:
- результирующее усилие, оказываемое любым упором шарнира указанного рычажного механизма;
- компонента результирующего усилия, оказываемого любым упором шарнира указанного рычажного механизма, причем указанная компонента действует в направлении контактного усилия;
- компонента результирующего усилия, оказываемого любым упором шарнира указанного рычажного механизма, причем указанная компонента действует в направлении, перпендикулярном контактному усилию.
3. Способ по п. 1 или 2, в котором на этапе получения: с использованием измеренного усилия на упоре шарнира указанного рычажного приводного механизма вычисляют контактное усилие, которое непосредственно оказывает подвижный контакт автоматического выключателя на рычажный механизм приводного механизма;
при этом на этапе определения: определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения указанного вычисленного контактного усилия.
4. Способ по любому из предыдущих пунктов, в котором изменение усилия идентифицируют исходя из величины усилия и/или скорости изменения усилия.
5. Способ по п. 4, в котором на этапе получения:
производят выборку количества числа значений характеристического усилия в различные моменты времени, начиная с начального момента, и
получают первый массив F [a1, a2, …ai, …an], представляющий значения характеристического усилия в моменты выборки, и второй массив T [t1, t2, …ti, …tn], представляющий соответствующие моменты выборки, где “ai” – значение отобранного характеристического усилия для i-го отсчета, “n” – число отсчетов, “ti” – момент времени для i-го отсчета.
6. Способ по п. 5, в котором на этапе определения: идентифицируют элемент (ai), начиная с первого элемента в первом массиве F, значение которого впервые достигает или превосходит первое заданное значение (V1) усилия, и определяют момент (ti) времени во втором массиве T, соответствующий идентифицированному элементу (ai) из первого массива F, как момент времени замыкания автоматического выключателя.
7. Способ по п. 5, в котором на этапе определения: идентифицируют элемент (ai), начиная с первого элемента в первом массиве F, значение которого впервые меньше или равно второму заданному значению (V2) усилия, и определяют момент (ti) времени во втором массиве T, соответствующий идентифицированному элементу (ai) из первого массива F, как момент времени размыкания автоматического выключателя.
8. Способ по п. 5, в котором на этапе определения: идентифицируют элемент (ai), начиная с первого элемента в первом массиве F, который впервые удовлетворяет условию:
имеется только заданное число (V3) следующих друг за другом элементов от предыдущего элемента до идентифицированного элемента (ai) в первом массиве F, причем каждый из идущих друг за другом элементов имеет значение, меньше или равное второму заданному значению (V2) усилия;
и затем определяют момент (ti-V3+1) времени во втором массиве Т, соответствующий первому элементу из заданного числа (V3) следующих друг за другом элементов в первом массиве F, как момент времени размыкания автоматического выключателя.
9. Способ по п. 5, в котором на этапе получения также: вычисляют и получают третий массив dF [(a2-a1)/(t2-t1), (a3-a2)/(t3-t2),…(ai-ai-1)/(ti-ti-1),…(an-an-1)/(tn-tn-1)], представляющий скорость изменения усилия, в котором каждый элемент относится к скорости изменения усилия в течение двух соседних отсчетов.
10. Способ по п. 8, в котором на этапе определения:
идентифицируют элемент (ai), начиная с первого элемента в первом массиве F, который впервые удовлетворяет следующим условиям:
- значение идентифицированного элемента (ai) достигает или превосходит первое заданное значение (V1) усилия;
- среди нескольких элементов в третьем массиве dF, которые равны или близки к соответствующему элементу ((ai-ai-1)/(ti-ti-1)) в третьем массиве dF, имеется элемент ((aj-aj-1)/(tj-tj-1)), значение которого достигает или превосходит первое значение (V4) скорости изменения усилия, причем соответствующий элемент ((ai-ai-1)/(ti-ti-1)) в третьем массиве dF относится к скорости изменения усилия в тот момент времени, когда отобран идентифицированный элемент (ai) в первом массиве F;
и затем определяют момент (ti) времени во втором массиве Т, соответствующий идентифицированному элементу (ai) из первого массива F, как момент времени замыкания автоматического выключателя.
11. Способ по п. 8, в котором на этапе определения:
идентифицируют элемент (ai), начиная с первого элемента в первом массиве F, который впервые удовлетворяет следующим условиям:
- значение идентифицированного элемента (ai) меньше или равно второму заданному значению (V2) усилия;
- среди нескольких элементов в третьем массиве dF, которые равны или близки к соответствующему элементу ((ai-ai-1)/(ti-ti-1)) в третьем массиве dF, имеется элемент ((aj-aj-1)/(tj-tj-1)), абсолютное значение которого достигает или превосходит второе заданное значение (V5) скорости изменения усилия, причем соответствующий элемент ((ai-ai-1)/(ti-ti-1)) в третьем массиве dF относится к скорости изменения усилия в тот момент времени, когда отобран идентифицированный элемент (ai) в первом массиве F;
и затем определяют момент (ti) времени во втором массиве Т, соответствующий идентифицированному элементу (ai) из первого массива F в качестве момента размыкания автоматического выключателя.
12. Способ по п. 4, в котором:
на этапе получения получают профиль значения характеристического усилия с течением времени; и
на этапе определения определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения профиля.
13. Способ по п. 12, в котором на этапе определения: обрабатывают профиль с помощью вейвлет-преобразования и определяют момент времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения в обработанном профиле.
14. Способ по п. 13, в котором вейвлет-преобразование основано на функции Хаара.
15. Устройство мониторинга автоматического выключателя с рычажным приводным механизмом для выполнения замыкания и размыкания подвижного контакта автоматического выключателя, содержащее:
средство для получения характеристического усилия на упоре шарнира указанного рычажного приводного механизма в течение времени; и
средство определения момента времени, когда происходит замыкание и/или размыкание автоматического выключателя, путем идентификации изменения усилия;
причем указанное средство определения выполнено с возможностью определять момент, когда происходит увеличение характеристического усилия, в качестве момента времени замыкания автоматического выключателя и с возможностью определять момент, когда происходит снижение характеристического усилия, в качестве момента времени размыкания автоматического выключателя.
| CN 102269650 A, 07.12.2011 | |||
| Искатель металлических предметов в теле человека | 1942 |
|
SU65664A1 |
| А.А.ЖАРКИХ "Обработка изображений на основе вейвлет-преобразования в базисе Хаара над конечным полем нечеткой характеристики" // Вестник МГТУ, том 12 N 2, 2009 г., стр | |||
| Способ утилизации отработанного щелока из бучильных котлов отбельных фабрик | 1923 |
|
SU197A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ИЗНОСА КОНТАКТОВ ВЫКЛЮЧАТЕЛЯ | 2002 |
|
RU2297065C2 |
| RU 2002126077 A, 27.03.2004 | |||
| US 4433293 A1, 21.02.1984 | |||
| Способ изготовления фанеры-переклейки | 1921 |
|
SU1993A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

