Настоящее изобретение относится к области переключающих устройств для электрических систем среднего напряжения.
Применительно к настоящей заявке термин «среднее напряжение» (СН) относится к рабочим напряжениям на уровне распределения электроэнергии, которые превышают 1 кВ переменного тока и 2 кВ постоянного тока, вплоть до нескольких десятков кВ, например, до 72 кВ переменного тока и 100 кВ постоянного тока.
Как известно, электрические системы СН обычно включают в себя переключающие устройства, например автоматические выключатели или разъединители, контакторы и т.п.
Новейшие переключающие устройства используют приводные системы для перемещения подвижных контактов, которые включают в себя электродвигатели с внутренним контуром управления, например серводвигатели.
В целом, эти устройства представляют собой важное усовершенствование по сравнению с традиционными пружинными или магнитными переключающими устройствами, поскольку они могут предложить гораздо более высокую степень управления движением подвижных контактов.
Однако даже в этих устройствах на рабочие характеристики переключающих устройств во время маневра размыкания или маневра замыкания сильно влияют явления трения, явления износа, изменения рабочего состояния компонентов, явления износа вакуумных колб (в переключающих устройствах вакуумного типа) и т.п.
Чтобы смягчить эти проблемы, в электрических полюсах обычно размещают соответствующие специальные чувствительные схемы или устройства, чтобы контролировать рабочее состояние соответствующих внутренних компонентов электрических полюсов (например, электрических контактов).
Однако эти устройства часто влекут за собой заметное увеличение общего размера переключающего устройства и более высокие производственные затраты.
В уровне техники ощущается потребность в инновационных диагностических решениях, которые обеспечивают контроль рабочего состояния внутренних компонентов электрических полюсов без необходимости использования специальных громоздких датчиков.
Настоящее изобретение предназначено для удовлетворения этих потребностей за счет обеспечения блока управления для переключающего устройства СН согласно нижеприведенному пункту 1 формулы изобретения и соответствующим зависимым пунктам формулы изобретения.
Переключающее устройство содержит один или более электрических полюсов, каждый из которых выполнен с возможностью электрической связи с соответствующей электрической линией.
Переключающее устройство содержит:
- для каждого электрического полюса, неподвижный контакт и подвижный контакт. Указанный подвижный контакт является реверсивно перемещаемым между положением разъединения с указанным неподвижным контактом и положением соединения с указанным неподвижным контактом. Указанный подвижный контакт перемещается из указанного положения разъединения в указанное положение соединения во время маневра замыкания переключающего устройства. Указанный подвижный контакт перемещается из указанного положения соединения в указанное положение разъединения во время маневра размыкания переключающего устройства;
- серводвигательный блок, включающий в себя, по меньшей мере, серводвигатель и выполненный с возможностью выдачи сигнала состояния серводвигателя, характеризующего рабочее состояние, по меньшей мере, указанного серводвигателя (например, сигнал, характеризующий угловое положение ротора, по меньшей мере, указанного серводвигателя);
- узел передачи движения, выполненный с возможностью механически связывать указанный серводвигательный блок с подвижными контактами указанных одного или более электрических полюсов.
Блок управления согласно изобретению выполнен с возможностью осуществления способа диагностики для контроля рабочего состояния одного или более компонентов указанных электрических полюсов.
Указанный способ диагностики включает следующие этапы:
- на основании выбираемой оптимальной кривой положения, вычисляют одну или более первых кривых, характеризующих оптимальные параметры указанного переключающего устройства во время маневра замыкания или маневра размыкания переключающего устройства;
- на основании сигналов определения, выдаваемых схемой управления с обратной связью указанного блока управления, путем обработки указанного сигнала состояния серводвигателя, вычисляют одну или более вторых кривых, характеризующих фактические параметры указанного переключающего устройства, во время маневра замыкания или маневра размыкания указанного переключающего устройства;
- выполняют процедуру сравнения между указанными первой и второй кривыми.
В еще одном аспекте настоящее изобретение относится к способу диагностики для контроля рабочего состояния одного или более компонентов одного или более электрических полюсов переключающего устройства среднего напряжения согласно нижеприведенному пункту 13 формулы изобретения и соответствующим зависимым пунктам.
Переключающее устройство содержит:
- для каждого электрического полюса, неподвижный контакт и подвижный контакт. Указанный подвижный контакт является реверсивно перемещаемым между положением разъединения с указанным неподвижным контактом и положением соединения с указанным неподвижным контактом. Указанный подвижный контакт перемещается из указанного положения разъединения в указанное положение соединения во время маневра замыкания переключающего устройства. Указанный подвижный контакт перемещается из указанного положения соединения в указанное положение разъединения во время маневра размыкания переключающего устройства;
- серводвигательный блок, включающий в себя, по меньшей мере, серводвигатель и выполненный с возможностью выдавать сигнал состояния серводвигателя, характеризующий рабочее состояние, по меньшей мере, указанного серводвигателя (например, сигнал, характеризующий угловое положение ротора, по меньшей мере, указанного серводвигателя);
- узел передачи движения, выполненный с возможностью механически связывать указанный серводвигательный блок с подвижными контактами указанного одного или более электрических полюсов;
- блок управления для управления работой указанного переключающего устройства.
Указанный способ диагностики включает следующие этапы:
- на основании выбираемой кривой оптимального положения вычисляют одну или более первых кривых, характеризующих оптимальные параметры указанного переключающего устройства, во время маневра размыкания или маневра замыкания указанного переключающего устройства;
- на основании сигналов определения, выдаваемых схемой управления с обратной связью указанного блока управления, вычисляют одну или более вторых кривых, характеризующих фактические параметры указанного переключающего устройства, во время маневра размыкания или маневра замыкания указанного переключающего устройства;
- выполняют процедуру сравнения между указанными первой и второй кривыми.
В еще одном аспекте настоящее изобретение относится к переключающему устройству СН согласно нижеприведенному пункту 13 формулы изобретения.
Характеристики и преимущества изобретения будут очевидными из описания предпочтительных, но не исключительных вариантов осуществления блока управления согласно изобретению, неограничивающие примеры которого представлены на прилагаемых чертежах, где:
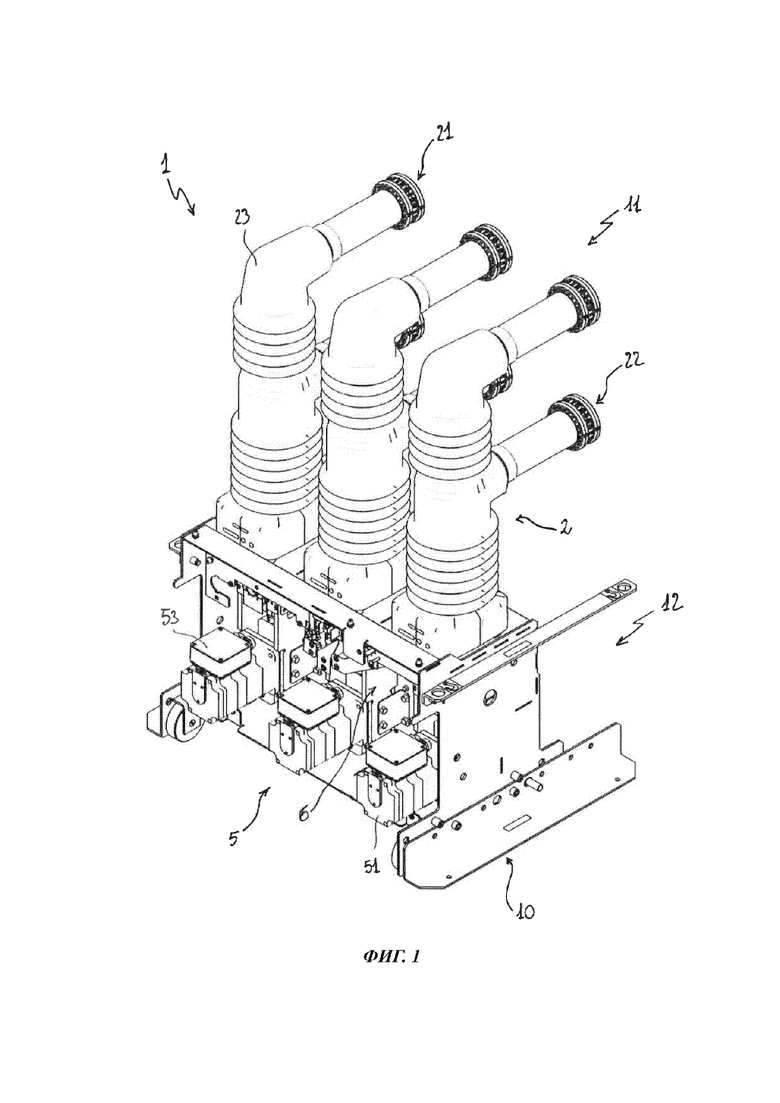
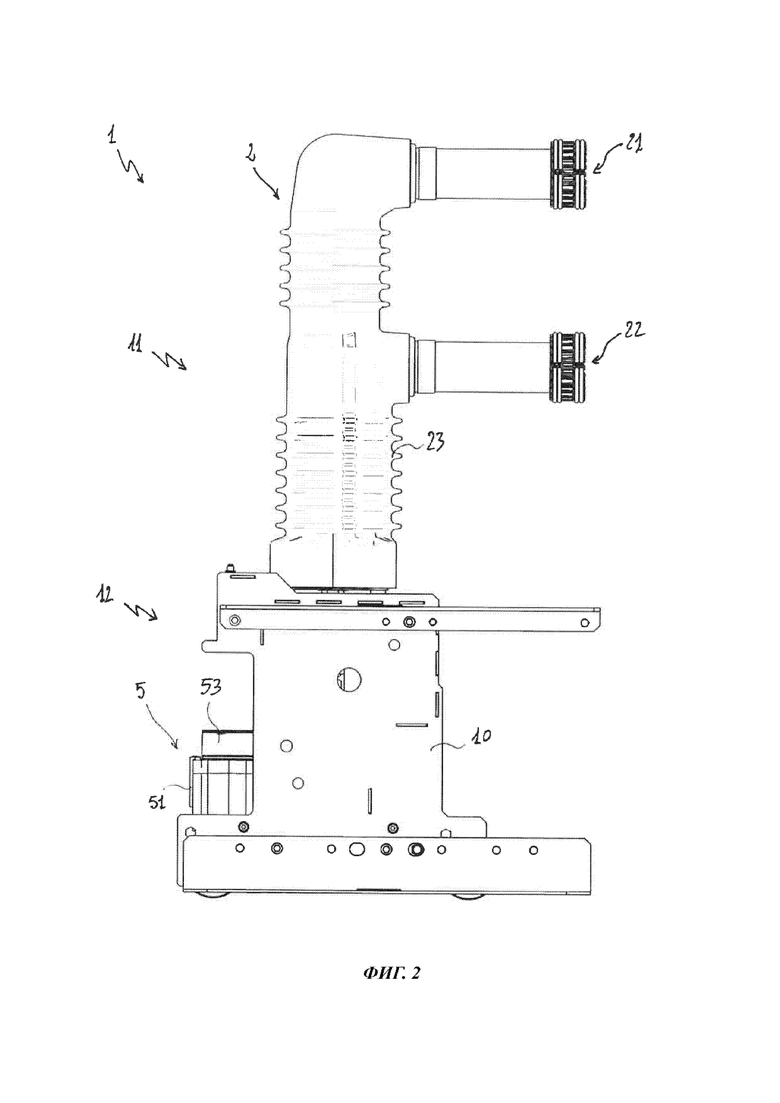
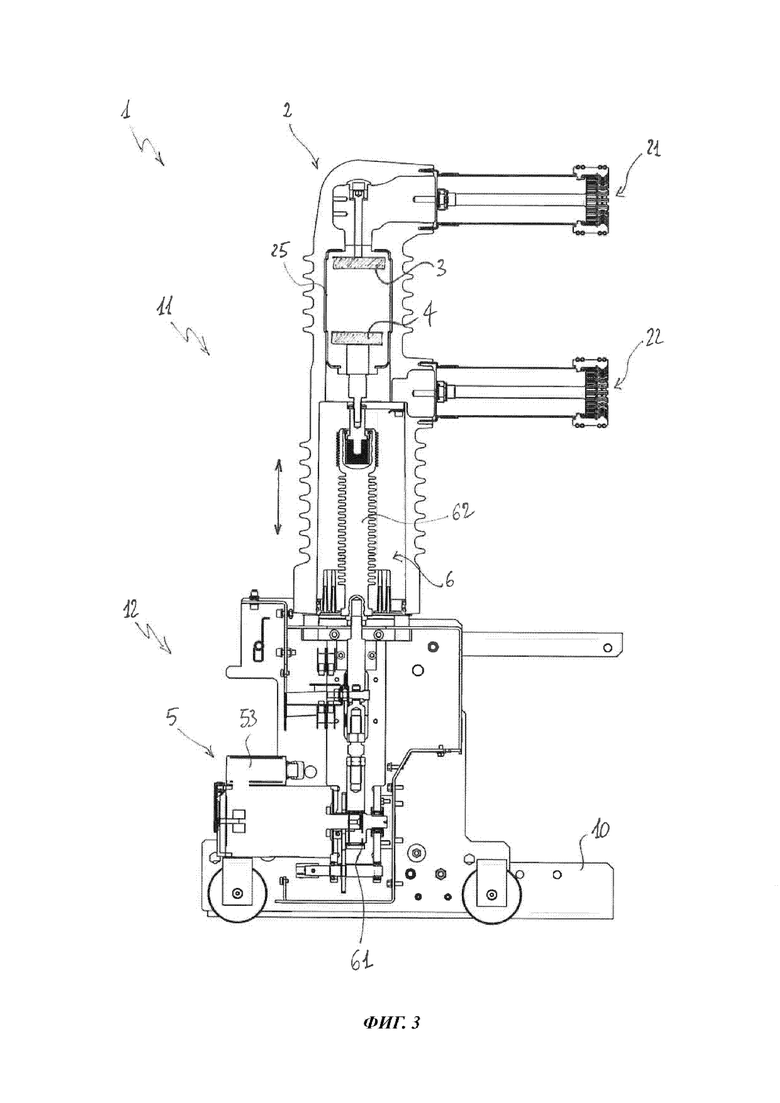
- на фиг. 1-3 показаны схематические виды переключающего устройства СН, управляемого блоком управления согласно изобретению;
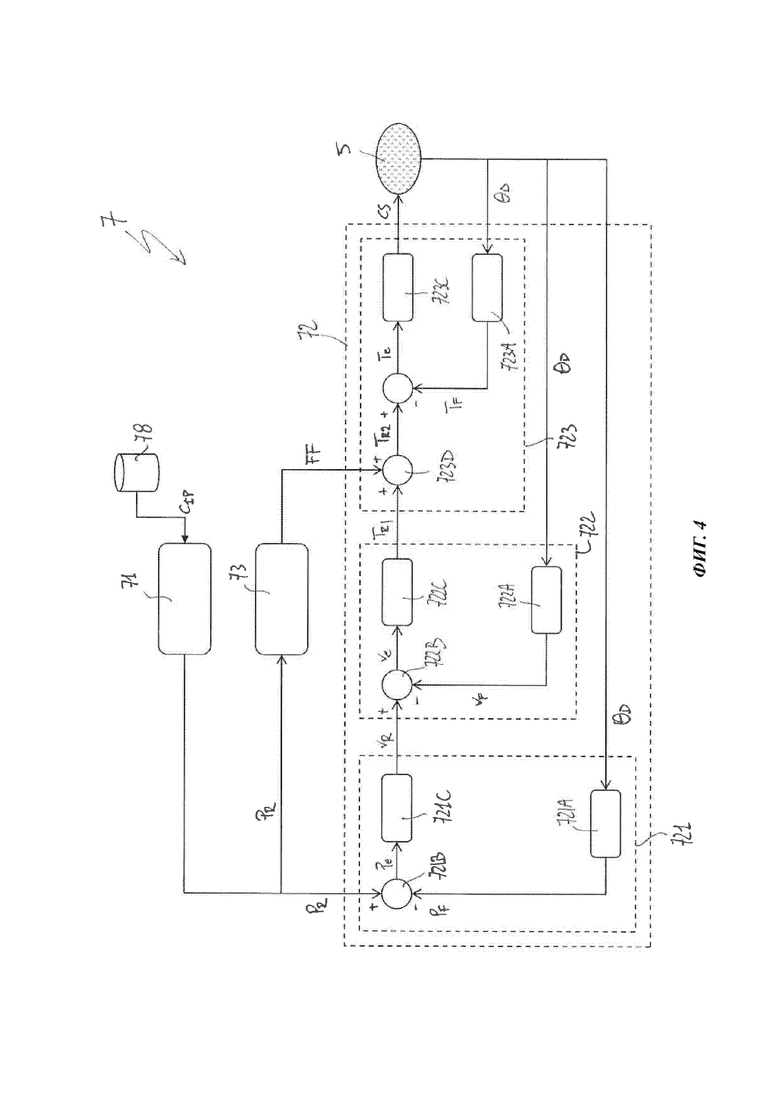
- на фиг. 4-5 показаны схематические виды блока управления в соответствии с различными вариантами осуществления изобретения;
- на фиг. 6-7 показаны схематические виды, иллюстрирующие способ диагностики согласно изобретению;
- на фиг. 8-9 показаны схематические примеры реализации способа диагностики согласно изобретению.
Как показано на чертежах, один из аспектов настоящего изобретения относится к блоку 7 управления для переключающего устройства 1 среднего напряжения (СН).
Блок 7 управления выполнен с возможностью управлять работой переключающего устройства 1.
В принципе, блок 7 управления может быть образован любым интеллектуальным электронным устройством (ИЭУ), соответственно выполненным с возможностью реализации функциональных возможностей управления, таких как функциональные возможности защиты, функциональные возможности контроля, функциональные возможности связи и т.п.
Например, блок 7 управления может быть защитным реле или контроллером для электрических сетей или устройств.
Удобно, что блок 7 управления содержит компьютеризированные средства блока (которые могут включать в себя соответствующие ресурсы цифровой обработки, например, один или более микропроцессоров или цифровых сигнальных процессоров), выполненные с возможностью приема и выполнения программных инструкций для осуществления предусмотренных функциональных возможностей управления, реализации соответствующих схем управления, приема, обработки и выдачи сигналов данных и/или сигналов управления и т.п.
Блок 7 управления может быть встроен в переключающее устройство 1 или может быть обеспечен дистанционно относительно этого последнего.
Блок 7 управления может быть автономным компьютеризированным устройством, при этом он может быть реализован на соответствующей компьютеризированной платформе, соответственно выполненной с возможностью управления интеллектуальной электрической сетью. Например, такая компьютеризированная платформа может быть реализована на соответствующих специализированных серверах или на уровне облачных вычислений.
В принципе, переключающее устройство 1 СН может быть любого типа, подходящего для установки в электрических сетях, например, автоматическим выключателем, разъединителем, контактором или другим устройством подобного типа.
Предпочтительно, переключающее устройство 1 относится к вакуумному типу работы, как показано на приведенных чертежах. Однако в соответствии с альтернативными вариантами осуществления (не показаны) переключающее устройство 1 может быть типа с воздушной изоляцией или типа с газовой изоляцией (применительно к изолирующей среде между электрическими контактами).
В соответствии с общим определением переключающее устройство 1 содержит полюсную секцию 11 и основание 12, которые соответственно включают в себя электрические полюса 2 и основные исполнительные компоненты 5, 6 переключающего устройства.
В качестве референсного взято нормальное положение установочного устройства 1, показанного на фиг. 1-3, при этом полюсная секция 11 расположена поверх основания 12.
Удобно, что переключающее устройство 1 содержит внешнюю раму 10, которая, по меньшей мере частично, может быть выполнена из электроизоляционного материала известного типа.
Переключающее устройство 1 содержит один или более электрических полюсов 2.
Предпочтительно, переключающее устройство 1 является устройством многофазного (например, трехфазного) типа, и, таким образом, оно содержит множество электрических полюсов 2 (например, три).
Однако, в соответствии с альтернативными вариантами осуществления (не показаны) переключающее устройство 1 может быть однофазного типа и иметь один электрический полюс.
Предпочтительно, каждый электрический полюс 2 содержит соответствующий изолирующий корпус 23, который удобно прикреплен к основанию 12 переключающего устройства.
Предпочтительно, каждый изолирующий корпус 23 образован удлиненным (например, цилиндрическим) полым элементом из электроизоляционного материала известного типа.
Предпочтительно, каждый изолирующий корпус 23 определяет внутренний объем, в котором размещены компоненты соответствующего электрического полюса 2.
Преимущественно, каждый электрический полюс 2 содержит первую полюсную клемму 21 и вторую полюсную клемму 22, которые могут быть механически прикреплены к корпусу 23 посредством соответствующих фланцев.
Полюсные клеммы 21, 22 выполнены с возможностью электрического соединения с соответствующим электрическим проводником (например, с фазовым проводником) электрической линии.
Для каждого электрического полюса 2 переключающее устройство 1 содержит неподвижный контакт 3 и подвижный контакт 4, которые электрически связаны с первым и вторым полюсными клеммами 21, 22, соответственно.
Каждый подвижный контакт 4 выполнен с возможностью реверсивного перемещения вдоль соответствующей оси смещения, которая удобно образует главную продольную ось соответствующего электрического полюса 2.
Предпочтительно, оси смещения подвижных контактов 4 параллельны друг другу и лежат в общей плоскости смещения.
В частности, каждый подвижный контакт 4 является реверсивно перемещаемым (см. соответствующую стрелку двунаправленного смещения на фиг. 3) между положением разъединения (положением размыкания) с соответствующим неподвижным контактом 3 и положением соединения (положением замыкания) с соответствующим неподвижным контактом 3.
Переход подвижных контактов 4 из указанного положения соединения в указанное положение разъединения представляет собой маневр размыкания переключающего устройства 1, тогда как переход подвижных контактов 4 из указанного положения разъединения в указанное положение соединения представляет собой маневр замыкания переключающего устройства 1.
Предпочтительно, переключающее устройство 1 относится к вакуумному типу работы, как показано на приведенных чертежах. В этом случае для каждого электрического полюса 2 переключающее устройство 1 содержит вакуумную колбу 25, в которой находится соответствующая пара подвижных и неподвижных контактов 3, 4, которые могут быть соединены/разъединены друг с другом.
Переключающее устройство 1 содержит серводвигательный блок 5, обеспечивающий усилия срабатывания для приведения в действие подвижных контактов 4.
Серводвигательный блок 5 содержит, для каждого электрического полюса, по меньшей мере, серводвигательный двигатель 51, выходной вал которого функционально связан с соответствующим подвижным контактом 4 электрического полюса.
Однако в альтернативных вариантах осуществления изобретения (не показаны) вышеуказанный серводвигательный блок может содержать один серводвигатель, выходной вал которого механически связан со всеми подвижными контактами 4 электрических полюсов.
Удобно, что серводвигательный блок 5 способен обеспечивать сигнал θD состояния серводвигателя, характеризующий условия работы одного или более серводвигателей, например угловое положение роторов указанных одного или более серводвигателей 51.
Предпочтительно, серводвигательный блок 5 для каждого серводвигателя 51 содержит блок 53 питания и управления.
Предпочтительно каждый блок 53 питания и управления содержит подходящие электрические схемы для питания соответствующего электродвигателя 50 и подходящие электронные схемы (например, включающие в себя один или более цифровых процессоров, таких как микропроцессоры) для управления работой соответствующего серводвигателя 51, например, в ответ на соответствующий сигнал CS регулирования серводвигателя, принятый от блока 7 управления.
Переключающее устройство 1 содержит узел 6 передачи движения, выполненный с возможностью функционально связывать серводвигательный блок 5 с подвижными контактами 4 электрических полюсов 2.
Предпочтительно, узел 6 передачи движения содержит, для каждого электрического полюса 2, эксцентриковый механизм 61 передачи движения, удобно выполненный таким образом, чтобы приводиться в действие вращательными механическими усилиями, создаваемыми соответствующим серводвигателем 51, и передавать, в свою очередь, поступательные механические усилия для приведения в действие подвижного контакта 4 соответствующего электрического полюса 2 во время маневра размыкания или маневра замыкания переключающего устройства.
Предпочтительно, узел 6 передачи движения дополнительно содержит, для каждого электрического полюса 2, механизм 62 передачи движения, выполненный с возможностью его приведения в действие поступательными механическими усилиями, создаваемыми соответствующим эксцентриковым механизмом 61, и передачи, в свою очередь, поступательных механических усилий на подвижный контакт 4 соответствующего электрического полюса 2 во время маневра размыкания или маневра замыкания переключающего устройства.
В общем, электрические полюса 2, серводвигательный блок 5 и узел 6 передачи движения могут быть известного типа, и для краткости они здесь не будут раскрываться подробнее. В качестве примера, они могут быть выполнены и работать как в переключающем устройстве, раскрытом в европейской заявке на патент №. ЕР 17154638.5.
Предпочтительно, блок 7 управления переключающего устройства 1 содержит первую схему 71 управления, выполненную с возможностью обеспечения функциональных возможностей контроля и управления для управления работой указанного переключающего устройства.
Удобно, что первая схема 71 управления выполнена с возможностью выдачи референсного сигнала PR положения, характеризующего референсное положение для подвижных контактов 4 во время маневра размыкания или маневра замыкания указанного переключающего устройства.
Первая схема 71 управления выполнена с возможностью вычисления референсного сигнала PR положения путем выбора и обработки кривой CIP оптимального положения, характеризующей требуемый профиль положения для подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
Предпочтительно, первая схема 71 управления выбирает указанную референсную кривую CIP оптимального положения из набора заданных кривых оптимального положения, хранящихся в библиотеке 78 блока 7 управления.
Такой процесс выбора может происходить в зависимости от командных сигналов, принимаемых блоком 7 управления (например, от соответствующего человеко-машинного интерфейса (HMI, human machine interface) или удаленного компьютеризированного устройства), или на основании заданного порядка выбора, который учитывает тип переключающего устройства.
Предпочтительно, блок 7 управления содержит вторую схему 72 управления, выполненную с возможностью обеспечения функциональных возможностей управления с обратной связью при работе переключающего устройства.
Функциональные возможности управления, обеспечиваемые второй схемой 72 управления, в основном направлены на гарантирование стабильного и точного управления работой переключающего устройства.
Для обеспечения указанных функциональных возможностей управления вторая схема 72 управления удобно включает в себя множество вложенных модулей 721, 722, 723, 724, 725 управления с обратной связью для управления, по меньшей мере, положением и скоростью указанных подвижных контактов 4.
Вторая схема 72 управления выполнена с возможностью приема референсного сигнала PR положения и сигнала θD состояния серводвигателя, выдаваемых первой схемой 71 управления и серводвигательным блоком 5, соответственно.
На основании сигнала θD состояния серводвигателя, вторая схема 72 управления имеет возможность вычисления одного или более сигналов PF, vF, TF определения, характеризующих фактические параметры подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
На основании референсного сигнала PR положения и сигналов PF, vF, TF определения вторая схема 72 управления имеет возможность вычисления и выдачи сигнала CS регулирования серводвигателя для управления работой серводвигательного блока 5.
Предпочтительно (как показано на приведенных чертежах) блок 7 управления содержит третью схему 73 управления, выполненную с возможностью обеспечения функциональных возможностей управления с прямой связью при работе переключающего устройства.
Функциональные возможности управления, обеспечиваемые третьей схемой 73 управления, в основном направлены на улучшение времени отклика при управлении работой переключающего устройства за счет улучшения динамических параметров второй схемы 72 управления.
Для обеспечения указанных функциональных возможностей управления третья схема 73 управления удобно взаимодействует со второй схемой 72 управления, чтобы настраивать один или более сигналов (например, референсные сигналы TR1, vR1), вычисляемых и выдаваемых одним или более из вложенных модулей 721, 722, 723, 724, 725 управления с обратной связью.
Третья схема 73 управления выполнена с возможностью приема и обработки референсного сигнала PR положения, выдаваемого первой схемой 71 управления.
На основании этого сигнала, принятого на входе, третья схема 73 управления имеет возможность вычисления и выдачи настроечного сигнала FF.
Вторая схема 72 управления принимает настроечный сигнал FF и использует его для настройки одного или более сигналов регулирования или референсных сигналов TRI, vRI, вычисляемых указанными модулями управления с обратной связью.
На фиг. 4 схематично показан вариант осуществления блока 7 управления.
В соответствии с этим вариантом осуществления вторая схема 72 управления содержит три вложенных модуля 721, 722, 723 управления с обратной связью для управления положением, скоростью и усилием срабатывания подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
Предпочтительно, вторая схема 72 управления содержит первый модуль 721 управления с обратной связью, который предназначен для управления положением подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
В частности, во время маневра размыкания или маневра замыкания переключающего устройства второй модуль 722 управления с обратной связью способен обрабатывать референсный сигнал PR положения, выдаваемый первой схемой 71 управления, и сигнал θD состояния серводвигателя, выдаваемый серводвигателем 5, и выдавать референсный сигнал vR скорости для внутреннего модуля управления с обратной связью.
Во время маневра размыкания или маневра замыкания переключающего устройства первый модуль 721 управления с обратной связью принимает референсный сигнал PR положения и сигнал θD состояния серводвигателя.
Первый модуль 721 управления с обратной связью вычисляет сигнал PF определения положения, характеризующий фактическое положение подвижных контактов 4, на основании сигнала θD состояния серводвигателя.
Для этого первый модуль 721 управления с обратной связью содержит вычислительный блок 721А, выполненный с возможностью приема и обработки сигнала θD состояния серводвигателя и выдачи сигнала PF определения положения.
Первый модуль 721 управления с обратной связью вычисляет сигнал Ре ошибки положения, характеризующий разницу между референсным сигналом PR положения и определением PF положения.
Для этого первый модуль 721 управления с обратной связью содержит другой вычислительный блок 721В, выполненный с возможностью принимать и обрабатывать референсный сигнал PR положения и сигнал PD определения положения и выдавать сигнал Ре ошибки положения.
Первый модуль 721 управления с обратной связью вычисляет референсный сигнал vR скорости, характеризующий референсную скорость для подвижных контактов 4.
Для этого первый модуль 721 управления с обратной связью содержит блок 721С регулирования, выполненный с возможностью принимать и обрабатывать сигнал Ре ошибки положения и выдавать референсный сигнал vR скорости.
Предпочтительно, вторая схема 72 управления содержит второй модуль 722 управления с обратной связью, который предназначен для управления скоростью подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
В частности, во время маневра размыкания или маневра замыкания переключающего устройства, второй модуль 722 управления с обратной связью выполнен с возможностью обрабатывать референсный сигнал vR скорости, выдаваемый первым модулем 72 управления с обратной связью и сигнал θD состояния серводвигателя, выдаваемый серводвигательным блоком 5, и выдавать первый референсный сигнал TR1 усилия срабатывания для внутреннего модуля управления с обратной связью.
Во время маневра размыкания или маневра замыкания переключающего устройства второй модуль 722 управления с обратной связью принимает референсный сигнал vR скорости и сигнал θD состояния серводвигателя.
На основании сигнала θD состояния серводвигателя второй модуль 722 управления с обратной связью затем вычисляет сигнал vf определения скорости, характеризующий фактическую скорость подвижных контактов 4.
Для этого второй модуль 722 управления с обратной связью удобно содержит вычислительный блок 722А, выполненный с возможностью приема и обработки сигнала θD состояния серводвигателя и выдачи сигнала vF определения скорости.
Второй модуль 722 управления с обратной связью вычисляет сигнал ve ошибки скорости, характеризующий разницу между референсным сигналом скорости vR и определением vF скорости.
Для этого второй модуль 722 управления с обратной связью содержит другой вычислительный блок 722В, выполненный с возможностью принимать и обрабатывать референсный сигнал скорости vR и сигнал детектирования скорости vF и выдавать сигнал ve ошибки скорости.
Второй модуль 722 управления с обратной связью вычисляет первый референсный сигнал TR1 усилия срабатывания, характеризующий референсное усилие срабатывания, которое нужно приложить к подвижным контактам 4. Для этого второй модуль 722 управления с обратной связью содержит блок 722С регулирования, выполненный с возможностью принимать и обрабатывать сигнал ve ошибки скорости и выдавать первый референсный сигнал TR1 усилия срабатывания.
Предпочтительно, вторая схема 72 управления содержит третий модуль 723 управления с обратной связью, который предназначен для управления усилием срабатывания, приложенным к подвижным контактам 4 во время маневра размыкания или маневра замыкания переключающего устройства.
В частности, во время маневра размыкания или маневра замыкания переключающего устройства третий модуль 723 управления с обратной связью способен обрабатывать первый референсный сигнал TR1 срабатывания, выдаваемый вторым контуром 722 управления, сигнал θD состояния серводвигателя, выдаваемый серводвигательным блоком 5, и настроечный сигнал FF, выдаваемый третьим устройством 73 управления, и выдавать сигнал CS регулирования серводвигателя для серводвигательного блока 5.
Во время маневра размыкания или маневра замыкания переключающего устройства третий модуль 723 управления с обратной связью принимает первый референсный сигнал TR1 срабатывания, сигнал θD состояния серводвигателя и настроечный сигнал FF.
Третий модуль 723 управления с обратной связью вычисляет второй референсный сигнал TR2 усилия срабатывания, характеризующий настроенное референсное усилие срабатывания для указанных подвижных контактов 4.
Для этого третий модуль 723 управления с обратной связью удобно включает в себя вычислительный блок 723D, выполненный с возможностью принимать и обрабатывать первый референсный сигнал TR1 усилия срабатывания и настроечный сигнал FF и выдавать второй референсный сигнал TR2 усилия срабатывания. Удобно, что второй референсный сигнал TR2 срабатывания вычисляют таким образом, чтобы улучшить общее время отклика второй схемы 72 управления для возможных отклонений референсного сигнала PR положения или возможного отклонения рабочего состояния подвижных контактов 4 (как характеризуется сигналом θD состояния серводвигателя).
На основании сигнала θD состояния серводвигателя, третий модуль 723 управления с обратной связью вычисляет сигнал TF определения усилия срабатывания, характеризующий фактическое усилие срабатывания, воздействующее на подвижные контакты 4.
Для этого третий модуль 723 управления с обратной связью удобно содержит другой вычислительный блок 723А, выполненный с возможностью принимать и обрабатывать сигнал θD состояния серводвигателя и выдавать сигнал TF определения усилия срабатывания.
Третий модуль 723 управления с обратной связью вычисляет сигнал Те ошибки усилия срабатывания, характеризующий разницу между вторым референсным сигналом TR2 усилия срабатывания и определением TF усилия срабатывания.
Для этого третий модуль 723 управления с обратной связью удобно содержит другой вычислительный блок 723В, выполненный с возможностью принимать и обрабатывать второй референсный сигнал TR2 усилия срабатывания и сигнал TF определения усилия срабатывания и выдавать сигнал Те ошибки усилия срабатывания.
Третий модуль 723 управления с обратной связью вычисляет сигнал CS регулирования серводвигателя, который нужно подать на серводвигательный блок 5, чтобы управлять его работой.
Для этого третий модуль 723 управления с обратной связью удобно содержит блок 723С регулирования, выполненный с возможностью принимать и обрабатывать сигнал Те ошибки усилия срабатывания и выдавать сигнал CS регулирования серводвигателя.
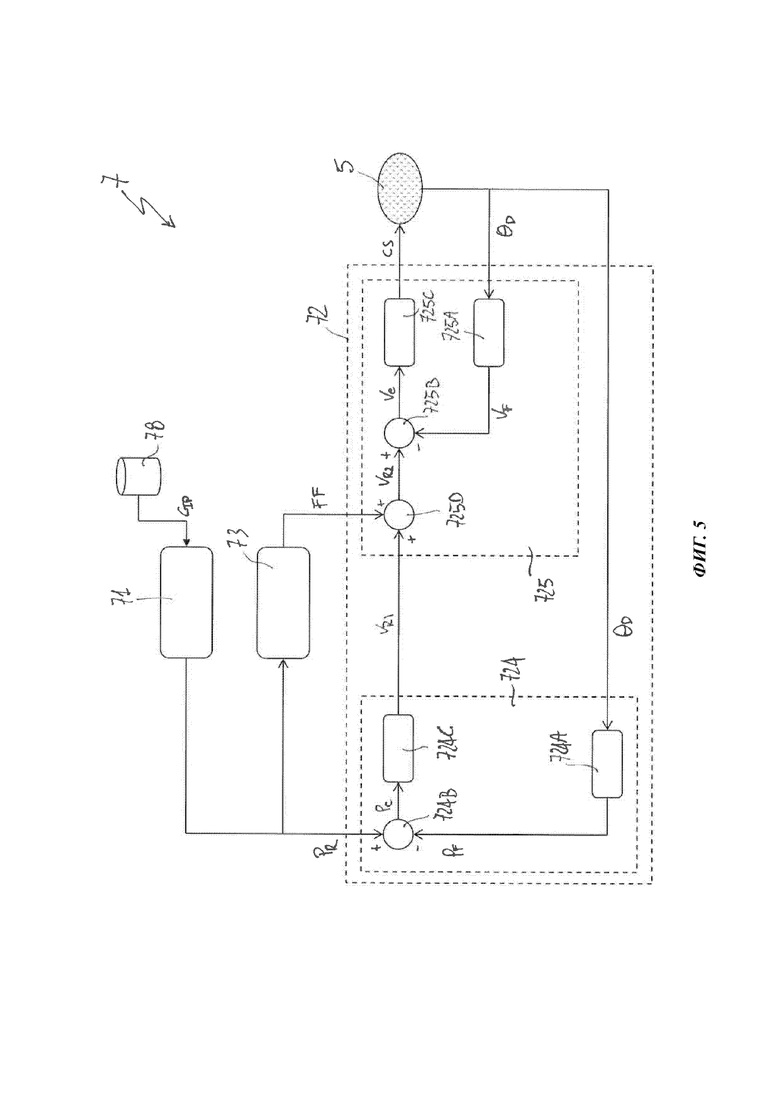
На фиг. 5 схематично показан альтернативный вариант осуществления блока 7 управления.
Согласно этому варианту осуществления второе устройство 72 управления содержит два вложенных модуля 724, 725 управления с обратной связью для управления положением и скоростью подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
Предпочтительно, второе управляющее устройство 72 содержит четвертый модуль 724 управления с обратной связью, предназначенный для управления положением подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
В частности, во время маневра размыкания или маневра замыкания переключающего устройства четвертый модуль 724 управления с обратной связью способен обрабатывать референсный сигнал PR положения, выдаваемый первой схемой 71 управления, и сигнал θD состояния серводвигателя, выдаваемый серводвигательным блоком 5, и выдавать референсный сигнал vR1 скорости для внутреннего модуля управления с обратной связью.
Во время маневра размыкания или маневра замыкания переключающего устройства четвертый модуль 724 управления с обратной связью принимает референсный сигнал PR положения и сигнал θD состояния серводвигателя.
На основании сигнала θD состояния серводвигателя, четвертый модуль 724 управления с обратной связью вычисляет сигнал PF определения положения, характеризующий фактическое положение подвижных контактов 4.
Для этого четвертый модуль 724 управления с обратной связью удобно содержит вычислительный блок 724А, выполненный с возможностью принимать и обрабатывать сигнал θD состояния серводвигателя и выдавать сигнал PF определения положения.
Четвертый модуль 724 управления с обратной связью вычисляет сигнал Ре ошибки положения, характеризующий разницу между референсным сигналом PR положения и определением PF положения.
Для этого четвертый модуль 724 управления с обратной связью удобно содержит другой вычислительный блок 724В, выполненный с возможностью принимать и обрабатывать референсный сигнал PR положения и сигнал PF определения положения и выдавать сигнал Ре ошибки положения.
Четвертый модуль 724 управления с обратной связью вычисляет первый референсный сигнал vR1 скорости, характеризующий референсную скорость для подвижных контактов 4.
Для этого четвертый модуль 724 управления с обратной связью удобно включает в себя блок 724С регулирования, выполненный с возможностью принимать и обрабатывать сигнал Ре ошибки положения и выдавать первый референсный сигнал vR1 скорости.
Предпочтительно, вторая схема 72 управления содержит пятый модуль 725 управления с обратной связью, который предназначен для управления скоростью подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
В частности, во время маневра размыкания или маневра замыкания переключающего устройства пятый модуль 725 управления с обратной связью имеет возможность обрабатывать первый референсный сигнал vR1 скорости, выдаваемый четвертым контуром 724 управления, сигнал θD состояния серводвигателя, выдаваемый серводвигательным блоком 5 и настроечный сигнал FF, выдаваемый третьей схемой 73 управления, и выдавать сигнал CS регулирования серводвигателя для серводвигательного блока 5.
Во время маневра размыкания или маневра замыкания переключающего устройства пятый модуль 725 управления с обратной связью принимает первый референсный сигнал vR1 скорости, сигнал θD состояния серводвигателя и настроечный сигнал FF.
Пятый модуль 725 управления с обратной связью вычисляет второй референсный сигнал vR2 скорости, характеризующий настроенную референсную скорость для подвижных контактов 4.
Для этого пятый модуль 725 управления с обратной связью удобно включает в себя вычислительный блок 725D, выполненный с возможностью принимать и обрабатывать первый референсный сигнал vR1 скорости и настроечный сигнал FF и выдавать второй референсный сигнал vR2 скорости.
Удобно, что второй сигнал vR2 скорости вычисляется таким образом, чтобы улучшить общее время отклика второй схемы 72 управления для возможных отклонений референсного сигнала PR положения или рабочего состояния подвижных контактов 4 (как косвенно сообщает сигнал θD состояния серводвигателя).
На основании сигнала θD состояния серводвигателя пятый модуль 725 управления с обратной связью вычисляет сигнал vF определения скорости, характеризующий фактическую скорость подвижных контактов 4.
Для этого пятый модуль 725 управления с обратной связью удобно содержит другой вычислительный блок 725А, выполненный с возможностью принимать и обрабатывать сигнал θD состояния серводвигателя и выдавать сигнал vF определения скорости.
Пятый модуль 725 управления с обратной связью затем вычисляет сигнал ve ошибки скорости, характеризующий разницу между вторым (настроенным) референсным сигналом скорости vR2 и определением vF скорости.
Для этого пятый модуль 725 управления с обратной связью удобно содержит другой вычислительный блок 725В, выполненный с возможностью принимать и обрабатывать второй референсный сигнал vR2 скорости и сигнал vF определения скорости и выдавать сигнал ve ошибки скорости.
Пятый модуль 725 управления с обратной связью вычисляет сигнал CS регулирования серводвигателя, который нужно подавать на серводвигательный блок 5, чтобы управлять его работой
Для этого пятый модуль 725 управления с обратной связью содержит блок 725С регулирования, выполненный с возможностью принимать и обрабатывать сигнал ve ошибки скорости и выдавать сигнал CS регулирования серводвигателя.
Существенный аспект изобретения состоит в том, что первая схема 71 управления выполнена с возможностью реализации способа 100 диагностики для проверки рабочих параметров указанных электрических полюсов 2 на основании одного или более сигналов PF, vF, TF определения, характеризующих фактические параметры подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства.
В соответствии с изобретением эти сигналы PF, vF, TF определения выдаются одним или более модулями 721, 722, 723, 724, 725 управления с обратной связью второй схемы 72 управления и вычисляются посредством указанных модулей управления с обратной связью на основании сигнала θD состояния серводвигателя, выдаваемого серводвигательным блоком 5
Очевидно, что первая схема 71 управления способна обеспечивать дополнительные функциональные возможности управления, которые могут быть известного типа и для краткости не будут здесь раскрываться. Такие дополнительные функциональные возможности управления могут включать в себя функциональные возможности сетевого межблочного управления, функциональные возможности связи, защитные функциональные возможности и т.п.
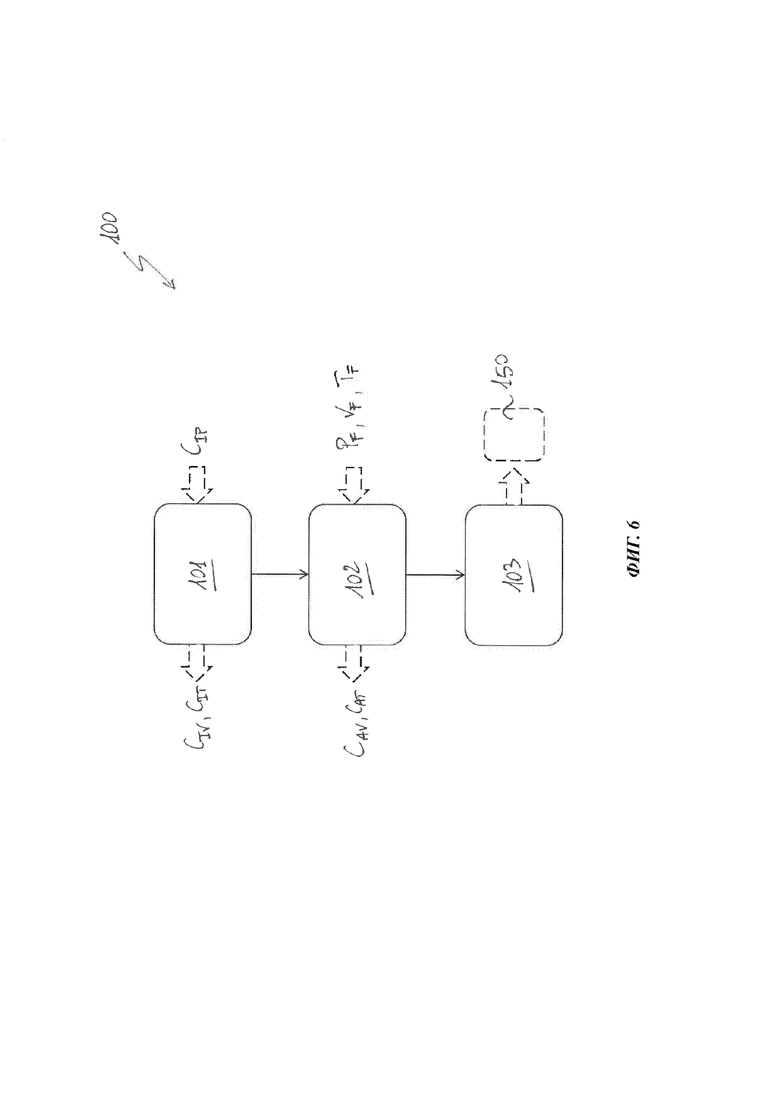
Далее вышеуказанный способ 100 диагностики раскрывается более подробно в соответствии с предпочтительным вариантом осуществления изобретения (фиг. 6).
Предпочтительно, способ 100 диагностики содержит этап 101 получения одной или более первых кривых Clv, CIT, характеризующих оптимальные параметры переключающего устройства 1 во время маневра размыкания или маневра замыкания указанного переключающего устройства.
Одна или более первых кривых (например, первые кривые Clv) могут быть вычислены на основании вышеуказанного кривой CIP оптимального положения, которую выбирают и обрабатывают посредством первой схемы 71 управления для вычисления референсного сигнала PR положения, подаваемого на вторую и третью схемы 72, 73 управления.
Одна или более первых кривых (например, первые кривые CIT) могут быть заданы, при этом их можно извлечь из носителя данных (например, из библиотеки 78).
Предпочтительно, первые кривые Clv, CIT, полученные с помощью первой схемы 71 управления, характеризуют оптимальные профили скорости и усилия срабатывания указанных подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства 1.
На практике первые кривые Clv, CIT представляют оптимальные профили скорости и усилия срабатывания, которым должны следовать подвижные контакты 4 во время маневра размыкания или маневра замыкания переключающего устройства 1, выполняемых с помощью второй и третьей схем управления, управляющих переключающим устройством таким образом, чтобы следовать референсному сигналу PR положения, выдаваемому первой схемой 71 управления.
Предпочтительно, способ 100 диагностики содержит дополнительный этап 102 вычисления одной или более вторых кривых CAv, CAT, характеризующих фактические параметры переключающего устройства 1 во время маневра размыкания или маневра замыкания указанного переключающего устройства.
Предпочтительно, вторые кривые CAv, CAT вычисляют на основании вышеуказанных сигналов PF, vF, TF определения посредством одного или более модулей 721, 722, 723, 724, 725 управления с обратной связью второй схемы 72 управления и вычисляют посредством указанных модулей управления с обратной связью на основании сигнала θD состояния серводвигателя, выдаваемого серводвигательным блоком 5.
Предпочтительно, вторые кривые CAv, CAT, вычисленные с помощью первой схемы 71 управления, характеризуют фактические профили скорости подвижных контактов 4 и усилие срабатывания, воздействующее на указанные подвижные контакты во время маневра размыкания или маневра замыкания переключающего устройства 1.
На практике вторые кривые CAv, CAT представляют собой фактические профили скорости и усилия срабатывания, которым в действительности следуют подвижные контакты 4 во время маневра размыкания или маневра замыкания переключающего устройства 1, выполняемых с помощью второй и третьей схем управления, управляющих переключающим устройством таким образом, чтобы следовать референсному сигналу PR положения, выдаваемому первой схемой 71 управления.
Предпочтительно, способ 100 диагностики содержит дополнительный этап 103, на котором выполняют процедуру 150 сравнения между первой и второй кривыми Clv, CIT, CAv, CAT для контроля рабочего состояния одного или более компонентов указанных электрических полюсов.
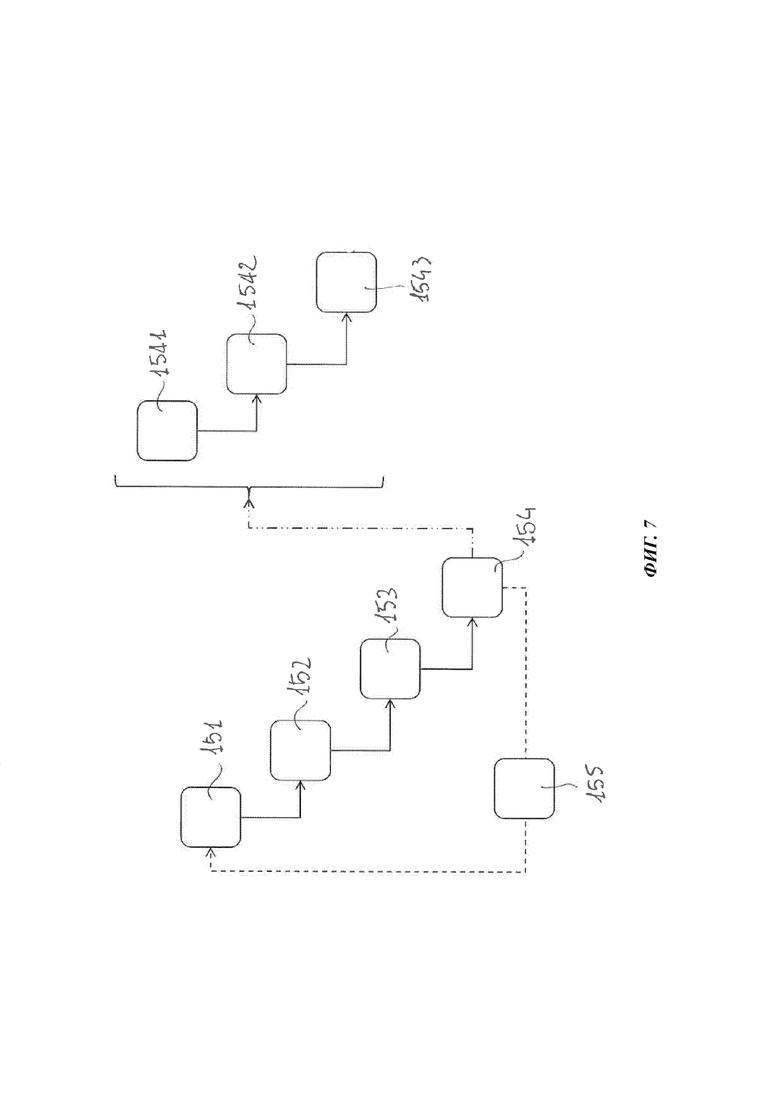
Далее вышеуказанное сравнение 150 будет раскрыто более подробно в соответствии с предпочтительным вариантом осуществления изобретения (фиг. 7).
Предпочтительно, процедура 150 сравнения содержит этап 151 выбора рабочего параметра электрических полюсов 2, подлежащего контролю.
Как станет более очевидно из нижеприведенных примеров, таким рабочим параметром может быть эффективность передачи движения узла 6 передачи движения, уровень эрозии электрических контактов 3, 4 электрических полюсов и т.п., на практике - любой подходящий рабочий параметр, который может характеризовать рабочее состояние компонента электрического полюса.
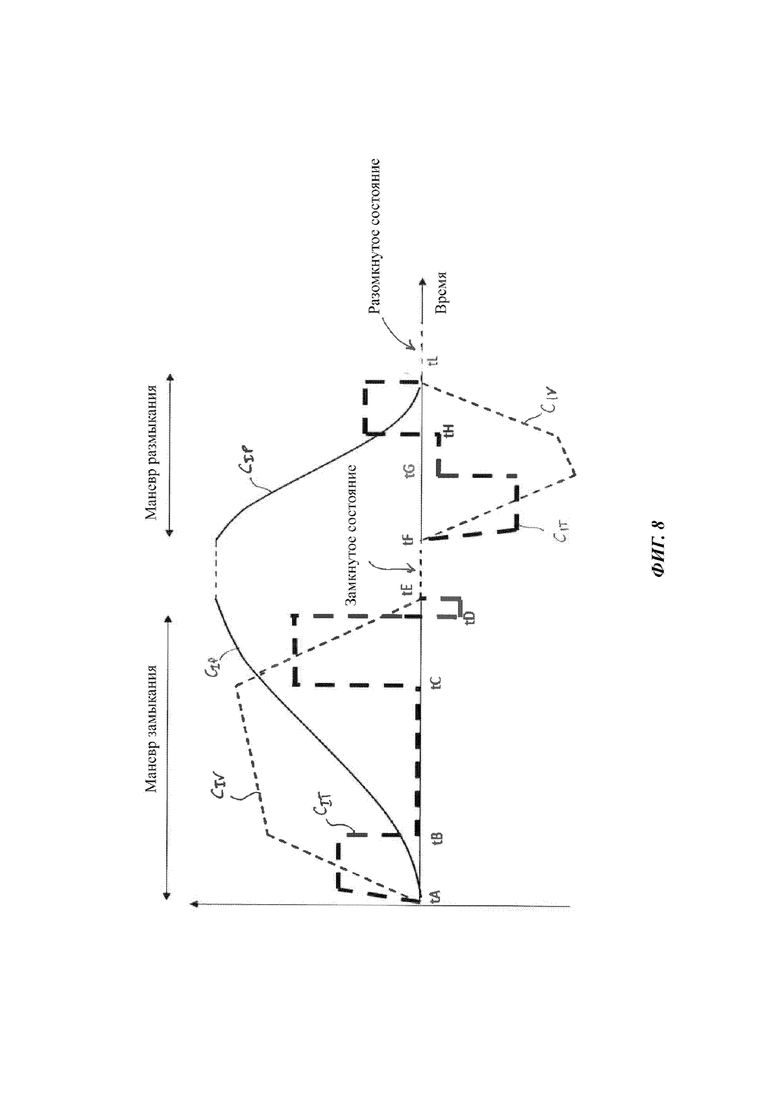
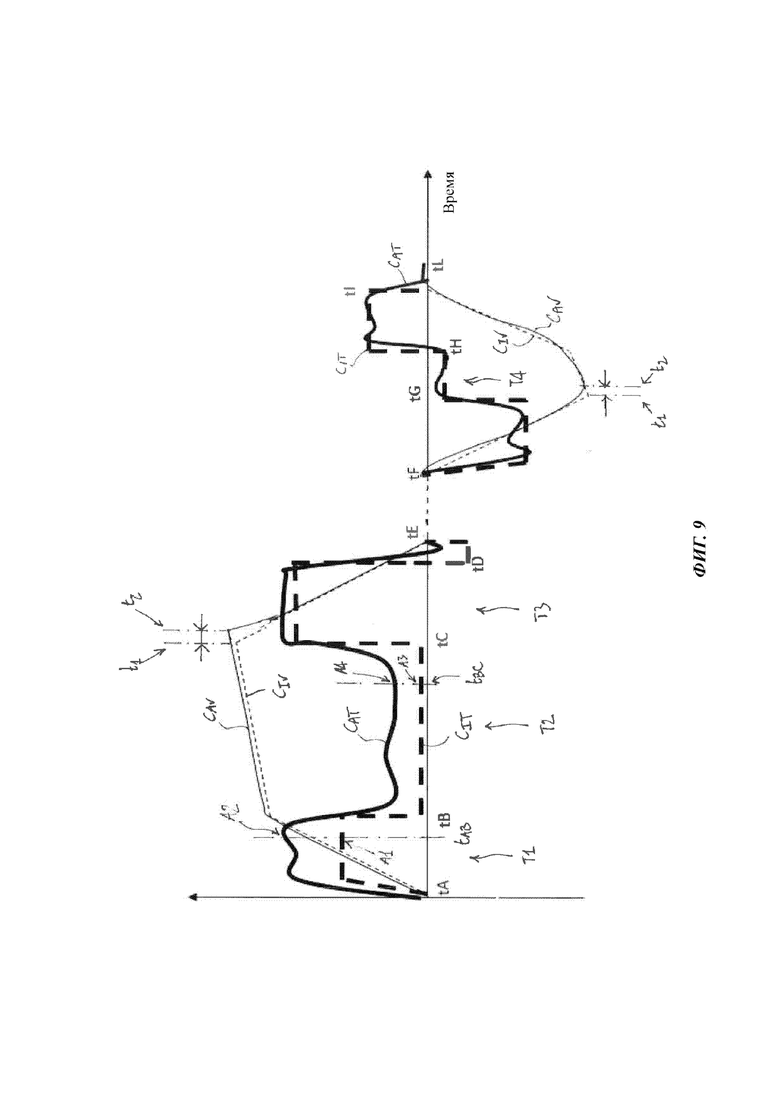
Предпочтительно, процедура 150 сравнения содержит этап 152 выбора временного окна Т1, Т2, Т3, Т4 наблюдения для первой и второй кривых Clv, CIT, CAv, CAT для контроля рабочего состояния выбранного рабочего параметра (фиг. 8-9).
Временные окна Т1-Т4 наблюдения представляют собой подходящие временные интервалы, которые выбирают в зависимости от характера выбранного рабочего параметра.
Например, можно выбрать заданное временное окно Т1 наблюдения для первой и второй кривых Clv, CIT, CAv, CAT для контроля эффективности передачи движения узла 6 передачи движения, в то время как другие временные окна Т3-Т4 наблюдения можно выбрать для контроля уровня эрозии электрических контактов, и т.д.
Предпочтительно процедура 150 сравнения содержит этап 153 выбора первой кривой Clv, CIT и соответствующей второй кривой CAv, CAT для контроля рабочего состояния выбранного рабочего параметра.
Например, для данного выбранного рабочего параметра можно выбрать первую и вторую кривые Clv, CAv, характеризующие оптимальные и фактические профили скорости подвижных контактов 4, тогда как для другого выбранного рабочего параметра можно выбрать первую и вторую кривые Clv, CAv, характеризующие оптимальные и фактические профили усилия срабатывания подвижных контактов 4.
Предпочтительно процедура 150 сравнения содержит этап 154 сравнения выбранной первой кривой Clv, CIT с соответствующей выбранной второй кривой CAv, CAT в выбранном временном окне Т1-Т4 наблюдения.
Предпочтительно, этап 154 сравнения обеспечивает вычисление подходящих значений Δ1, Δ2, Δ3 отклонения между соответствующими выбранными первым и вторым характеристическими значениями, характеризующими выбранный рабочий параметр.
Предпочтительно, этап 154 сравнения содержит под этап 1541 выбора первого характеристического значения А1, A3, t1 выбранной первой кривой Clv, CIT в выбранном временном окне Т1-Т4.
Удобно, что выбранное первое характеристическое значение А1, A3, t1 указывает выбранный рабочий параметр на выбранной первой кривой Clv, CIT.
Предпочтительно, этап 154 сравнения предпочтительно содержит подэтап 1542 выбора второго характеристического значения А2, А4, t2 выбранной второй кривой CAv, CAT в выбранном временном окне Т1-Т3.
Удобно, что выбранное второе характеристическое значение А2, А4, t2 соответствует выбранным первым характеристическим значениям, выбранным на предшествующем подэтапе 1541, и оно характеризует выбранный рабочий параметр на выбранной второй кривой CAv, CAT.
Предпочтительно, этап 154 сравнения предпочтительно содержит подэтап 1543 вычисления значения Δ1, Δ2, Δ3 отклонения между соответствующими выбранными первым и вторым характеристическими значениями А1, tC1, tG1, А2, tC2, tG2.
Удобно, что вычисленное значение Δ1, Δ2, Δ3 отклонения можно сравнить с соответствующим подходящим пороговым уровнем, чтобы контролировать, находится ли соответствующий рабочий параметр по-прежнему в пределах нормального состояния или он подвержен аномальным изменениям. Например, такие возможные аномальные изменения могут указывать на состояние входного сбоя.
Вычисленное значение Δ1, Δ2, Δ3 отклонения также можно использовать для получения количественных измерений, характеризующих состояние эрозии электрических контактов.
Предпочтительно, этапы 151-154 процедуры 150 сравнения можно повторить (этап 155) для другого выбираемого рабочего параметра электрических полюсов 2.
Обратимся к фиг. 8-9, где некоторые примеры реализации способа 100 диагностики проиллюстрированы более подробно с конкретным рассмотрением переключающего устройства 1 вакуумного типа, как показано на фиг. 1-3.
На фиг. 8 показана кривая CIP оптимального положения, характеризующая требуемый профиль положения для подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства 1.
Как упоминалось выше, первая схема 71 управления удобно выбирает кривую CIP оптимального положения из заданной библиотеки 78.
На основании кривой CIP оптимального положения, первая схема 71 управления получает первые кривые Clv, CIT, характеризующие действующие профили скорости и усилия срабатывания подвижных контактов 4 во время маневра размыкания или маневра замыкания переключающего устройства (этап 101 способа 100 диагностики).
Такое вычисление относительно легко осуществить, так как геометрия и кинематические параметры узла 6 передачи движения, который механически связывает серводвигательный блок 5 контактами 4, сами по себе известны.
На фиг. 9 показаны (в дополнение к вышеуказанным первым кривым Clv, CIT) вторые кривые CAv, CAT, характеризующие фактическую скорость и усилие срабатывания переключающего устройства 1, во время маневра размыкания или маневра замыкания указанного переключающего устройства, которые выполняют, следуя кривой CIP оптимального положения (референсному сигналу PR положения).
Как отмечалось выше, первая схема 71 управления принимает сигналы PF, vF, TF определения, которые вычислены второй схемой 72 управления при реализации ее функциональных возможностей управления, и на основании указанных сигналов PF, vF, TF определения вычисляет вторые кривые CAv, CAT (этап 102 способа 100 диагностики).
Также в этом случае такое вычисление относительно легко осуществить, так как геометрия и кинематические параметры узла 6 передачи движения, который механически связывает серводвигатель 5 с подвижными контактами 4, сами по себе известны.
Как отмечалось выше (этап 103 способа 100 диагностики), способ 100 диагностики предусматривает выполнение процедуры 150 сравнения между первой и второй кривыми Clv, CIT, CAv, CAT, соответственно характеризующими оптимальные и фактические параметры переключающего устройства 1 во время маневра размыкания или маневра замыкания, которые выполняют, следуя кривой CIP оптимального положения (референсному сигналу PR положения).
Обратимся к фиг. 9, где некоторые примеры процедуры сравнения 150 между первой и второй кривыми Clv, CIT, CAv, CAT проиллюстрированы более подробно.
ПРИМЕР №1
В качестве рабочего параметра электрических полюсов 2, подлежащего контролю (этап 151 процедуры 150 сравнения) взят уровень эффективности передачи движения к подвижным контактам 4.
Как известно, этот рабочий параметр обычно характеризует рабочее состояние узла 6 передачи движения, в частности - первого механизма 61 передачи движения.
Для контроля этого рабочего параметра можно выбрать первое временное окно Т1 наблюдения между моментами tA и tB во время маневра замыкания переключающего устройства 1 (этап 152 процедуры 150 сравнения).
Кроме того, выбирают первую и вторую кривые CIT, CAT, соответственно характеризующие оптимальный и фактический профиль усилия срабатывания, прикладываемого к подвижным контактам 4 (этап 153 процедуры 150 сравнения).
Выбранные первую и вторую кривые CIT, CAT затем сравнивают в выбранном временном окне Т1 наблюдения (этап 154 процедуры 150 сравнения).
Чтобы выполнить такое сравнение, соответствующие первое и второе характеристические значения А1, А2 первой и второй кривой CIT, CAT выбирают во временном окне Т1 наблюдения (подэтапы 1541-1542 этапа 154 сравнения).
В этом случае первое и второе характеристические значения А1, А2 являются механическими величинами, а именно - первым значением усилия срабатывания и вторым значением усилия срабатывания в один и тот же момент времени tAB, входящими во временное окно Т1 наблюдения, соответственно.
Затем вычисляют значение Δ1=A1-A2 отклонения между выбранными первым и вторым характеристическими значениями А1, А2 (подэтапы 1543 этапа 154 сравнения).
Это значение отклонения можно сравнить с пороговым уровнем.
Значение Δ1 отклонения, превышающее этот пороговый уровень, может указывать на то обстоятельство, что явления трения и люфта играют весомую роль в передаче движения подвижным контактам 4.
ПРИМЕР №2
В этом примере в качестве рабочего параметра электрических полюсов 2, подлежащего контролю (этап 151 процедуры 150 сравнения) рассматривается соотношение между вакуумным усилием, создаваемым вакуумной колбой, и механическим трением между подвижными контактами 4 и неподвижными контактами 4.
Как известно, этот рабочий параметр обычно характеризует рабочее состояние вакуумной колбы и электрических контактов 3, 4.
Чтобы контролировать этот рабочий параметр, можно выбрать второе временное окно Т2 наблюдения между моментами tB и tC во время маневра замыкания переключающего устройства 1 (этап 152 процедуры 150 сравнения).
Кроме того, выбирают первую и вторую кривые CIT, CAT, соответственно характеризующие оптимальный и фактический профиль скорости подвижных контактов 4 (этап 153 процедуры 150 сравнения).
Выбранные первая и вторая кривые CIT, CAT затем сравнивают в выбранном временном окне Т2 наблюдения (этап 154 процедуры 150 сравнения).
Чтобы выполнить такое сравнение, во временном окне Т2 наблюдения выбирают соответствующие третье и четвертое характеристические значения A3, А4 первой и второй кривой CIT, CAT (подэтапы 1541-1542 этапа 154 сравнения).
В этом случае первое и второе характеристические значения A3, А4 являются механическими величинами, а именно - значением A3 усилия срабатывания и вторым значением А4 усилия срабатывания в один и тот же момент времени tBC, входящий во второе временное окно Т2 наблюдения, соответственно.
Затем вычисляют значение Δ2=А3-А4 отклонения между выбранными первым и вторым характеристическими значениями A3, А4 (подэтап 1543 этапа 154 сравнения).
Это значение отклонения можно сравнить с соответствующим пороговым уровнем.
Значение Δ2 отклонения, превышающее этот пороговый уровень, может указывать на неправильное состояние балансировки между вакуумным усилием, оказываемым вакуумной колбой, и силой трения между электрическими контактами 3, 4.
ПРИМЕР №3
В этом примере в качестве рабочего параметра проверяемых электрических полюсов 2 (этап 151 процедуры 150 сравнения) рассматривается скорость подвижных контактов 4.
Как известно, этот рабочий параметр обычно характеризует состояние эрозии электрических контактов 3, 4 и/или усилие, оказываемое пружинами сжатия электрических полюсов.
Чтобы контролировать этот рабочий параметр, можно выбрать третье временное окно Т3 наблюдения между моментами tC и tD во время маневра замыкания переключающего устройства 1 или четвертое окно Т4 наблюдения между моментами tG и tH во время маневра замыкания переключающего устройства 1 (этап 152 процедуры 150 сравнения).
Кроме того, выбирают первую и вторую кривые Clv, CAv, соответственно характеризующие оптимальный и фактический профиль скорости подвижных контактов 4 (этап 153 процедуры 150 сравнения).
Выбранные первую и вторую кривые Clv, CAv затем сравнивают в выбранном временном окне ТЗ или Т4 наблюдения (этап 154 процедуры 150 сравнения).
Чтобы выполнить такое сравнение, во временном окне Т3 или Т4 наблюдения выбирают соответствующие пятое и шестое характеристические значения t1, t2 первой и второй кривой Clv, CAv (подэтапы 1541-1542 этапа 154 сравнения).
В этом случае пятое и четвертое характеристические значения t1, t2 являются временными величинами, а именно моментами t1 и t2, в которых скорость подвижных контактов 4 начинает уменьшаться во временных окнах Т3 или Т4 наблюдения.
Затем вычисляют значение Δ3=t1-t2 отклонения между выбранными первым и вторым характеристическими значениями t1, t2 (подэтап 1543 этапа 154 сравнения).
Это значение отклонения можно сравнить с соответствующим пороговым уровнем.
Значение Δ3 отклонения, превышающее этот пороговый уровень, может указывать на состояние чрезмерной эрозии электрических контактов 3, 4 или неправильное условие регулирования усилия срабатывания, создаваемого пружинами сжатия электрических полюсов 2.
Кроме того, поскольку фактическая скорость подвижных контактов 4 известна из второй кривой CAV, значение Δ3 отклонения позволяет даже количественно измерить участки электрических контактов 3, 4, пострадавшие из-за явлений эрозии.
Специалисту в данной области конечно же будет понятно, что дополнительные рабочие параметры электрических полюсов 2 можно соответствующим образом контролировать посредством процедуры 100 диагностики для сбора информации о рабочем состоянии одного или более компонентов указанных электрических полюсов.
Как очевидно из вышесказанного, в еще одном аспекте настоящее изобретение относится к способу 100 диагностики для контроля рабочего состояния одного или более компонентов электрических полюсов 2 переключающего устройства 1 среднего напряжения, как раскрыто выше.
Способ 100 диагностики в соответствии с изобретением включает в себя следующие этапы:
- на основании выбираемой кривой CIP оптимального положения получают (ссылочный этап 101) одну или более первых кривых Clv, CIT, характеризующих оптимальные параметры переключающего устройства во время маневра размыкания или замыкания переключающего устройства;
- на основании сигналов PF, vF, TF определения, выдаваемых второй схемой 72 управления, вычисляют (ссылочный этап 102) одну или более вторых кривых CAv, CAT, характеризующих фактические параметры переключающего устройства во время маневра размыкания или маневра замыкания указанного переключающего устройства;
- выполняют (ссылочный этап 103) процедуру 150 сравнения между первой и второй кривыми Clv, CIT, CAv, CAT.
Предпочтительно процедура 150 сравнения включает следующие этапы:
- выбирают (ссылочный этап 151) рабочий параметр указанных электрических полюсов, подлежащих контролю;
- выбирают (ссылочный этап 152) временное окно Т1, Т2, Т3, Т4 наблюдения для контроля указанного выбранного рабочего параметра;
- выбирают (ссылочный этап 153) первую кривую Clv, CIT и соответствующую вторую кривую CAv, CAT для контроля указанного выбранного рабочего параметра;
- сравнивают (ссылочный этап 154) выбранную первую кривую Clv, CIT с выбранной второй кривой CAv, CAT в указанных выбранных временных окнах Т1, Т2, Т3, Т4 наблюдения;
- опционально (ссылочный этап 155) повторяют предыдущие шаги для другого выбираемого рабочего параметра указанных электрических полюсов.
Предпочтительно, этап 154 сравнения выбранной первой кривой Clv, CIT с выбранной второй кривой CAv, CAT в выбранном временном окне Т1, Т2, Т3, Т4 наблюдения содержит следующие подэтапы:
- выбирают (ссылочный подэтап 1541) первое характеристическое значение А1, A3, t1 выбранной первой кривой Clv, CIT;
- выбирают (ссылочный подэтап 1542) второе характеристическое значение А2, А4, t2 выбранной второй кривой CAv, CAT, соответствующее выбранному первому характеристическому значению;
- вычисляют (ссылочный подэтап 1543) значение Δ1, Δ2, Δ3 отклонения между соответствующими выбранными первым и вторым характеристическими значениями.
Настоящее изобретение обеспечивает весомые преимущества по сравнению с известными решениями из уровня техники.
Способ 100 диагностики, осуществляемый блоком 7 управления, позволяет собирать информацию для контроля рабочего состояния одного или более компонентов электрических полюсов 2 без использования специальных датчиков.
Фактически, способ 100 диагностики обеспечивает надлежащую обработку сигналов PF, vF, TF определения, которые уже доступны для блока 7 управления, поскольку эти сигналы определения являются сигналами, которые надлежащим образом обрабатываются второй схемой 72 управления для реализации функциональных возможностей управления с обратной связью, раскрытых выше.
На практике, в способе 100 диагностики используют вторую схему 72 управления, выполненную с возможностью обеспечения функциональных возможностей управления с обратной связью, в качестве источника, способного выдавать сигналы PF, vF, TF определения, подходящие для получения информации о рабочем состоянии одного или более компонентов электрических полюсов 2.
Раскрытые выше возможности блока 7 управления позволяют обеспечить расширенные функциональные возможности управления переключающим устройством 1 без заметного увеличения размера и/или сложности этого последнего.
Переключающее устройство 1 согласно изобретению отличается высоким уровнем надежности для предполагаемых применений.
Промышленное изготовление и установка на месте переключающего устройства 1 согласно изобретению является относительно простым и недорогим.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОММУТАЦИОННЫЙ АППАРАТ СРЕДНЕГО НАПРЯЖЕНИЯ И УПРАВЛЯЮЩИЙ БЛОК ДЛЯ КОММУТАЦИОННОГО АППАРАТА СРЕДНЕГО НАПРЯЖЕНИЯ | 2020 |
|
RU2816793C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАБОЧЕГО СОСТОЯНИЯ СРЕДНЕВОЛЬТНОГО ЭЛЕКТРОМАГНИТНОГО ПЕРЕКЛЮЧАЮЩЕГО УСТРОЙСТВА | 2015 |
|
RU2696328C2 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ ДЛЯ ПРИМЕНЕНИЯ В НИЗКОВОЛЬТНЫХ ЦЕПЯХ | 2008 |
|
RU2477541C2 |
| БИПОЛЯРНЫЙ АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ ЦЕПИ ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИ НИЗКОМ НАПРЯЖЕНИИ | 2009 |
|
RU2505881C2 |
| ЗАМЫКАТЕЛЬ-РАЗМЫКАТЕЛЬ ЦЕПИ | 2000 |
|
RU2251755C2 |
| СПОСОБ КОНТРОЛЯ ПОВЕДЕНИЯ ШИНЫ ПРИ ДВИЖЕНИИ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2281215C2 |
| УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ СОЛЕНОИДНЫХ КЛАПАНОВ | 2018 |
|
RU2768368C2 |
| НИЗКОВОЛЬТНЫЙ ВЫКЛЮЧАТЕЛЬ | 2009 |
|
RU2505876C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ЭЛЕКТРИЧЕСКОЙ КОММУТАЦИИ И ОТНОСЯЩЕЕСЯ К НЕЙ УСТРОЙСТВО ЭЛЕКТРИЧЕСКОЙ КОММУТАЦИИ | 2016 |
|
RU2708063C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ, СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ И ЛИНИЯ ПРЕССОВАНИЯ | 2006 |
|
RU2373015C2 |
Изобретение относится к области электротехники, а именно к переключающим устройствам для электрических систем среднего напряжения. Технический результат заключается в повышении надежности контроля рабочего состояния внутренних компонентов электрических полюсов. Блок (7) управления выполнен с возможностью осуществления способа (100) диагностики для контроля рабочего состояния одного или более компонентов указанных электрических полюсов (2). Способ (100) диагностики включает следующие этапы: - на основании выбираемой кривой оптимального положения (CIP) получают (101) одну или более первых кривых (Clv, CIT), характеризующих оптимальные параметры указанного переключающего устройства, во время маневра размыкания или маневра замыкания переключающего устройства; - на основании сигналов (PF, vF, TF) определения, выдаваемых схемой (72) управления с обратной связью указанного блока управления, путем обработки указанного сигнала (θD) состояния серводвигателя, вычисляют (102) одну или более вторых кривых (CAv, CAT), характеризующих фактические параметры указанного переключающего устройства во время маневра размыкания или маневра замыкания указанного переключающего устройства; - выполняют (103) процедуру (150) сравнения между указанными первой и второй кривыми (Clv, CIT, CAv, CAT). 3 н. и 13 з.п. ф-лы, 9 ил.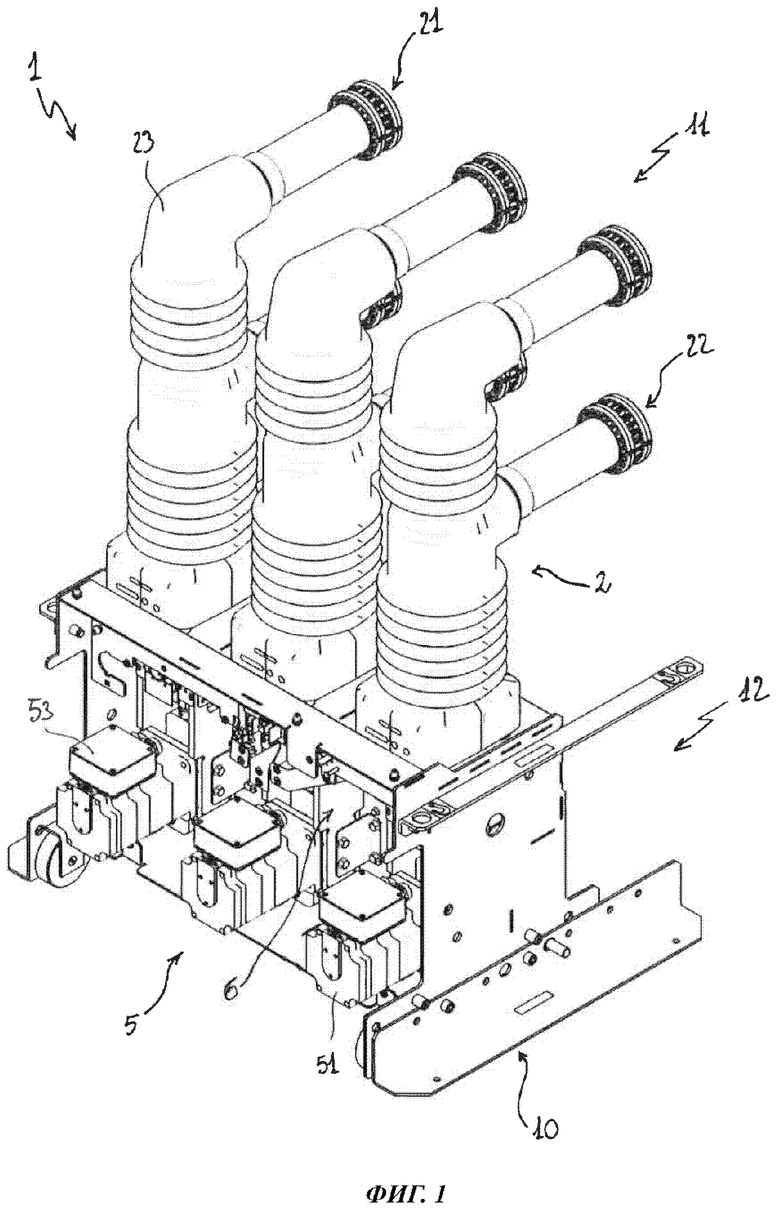
1. Блок (7) управления для переключающего устройства (1) среднего напряжения, причем указанное переключающее устройство содержит один или более электрических полюсов (2), каждый из которых выполнен с возможностью электрической связи с соответствующей электрической линией, при этом указанное переключающее устройство содержит:
для каждого электрического полюса, неподвижный контакт (3) и подвижный контакт (4), причем указанный подвижный контакт является реверсивно перемещаемым между положением разъединения с указанным неподвижным контактом и положением соединения с указанным неподвижным контактом, причем указанный подвижный контакт выполнен с возможностью перемещения из указанного положения разъединения в указанное положение соединения во время маневра замыкания переключающего устройства и перемещения из указанного положения соединения в указанное положение разъединения во время маневра размыкания переключающего устройства;
серводвигательный блок (5), содержащий, по меньшей мере, серводвигатель (51) и выполненный с возможностью выдачи сигнала (θD) состояния серводвигателя, характеризующего угловое положение указанного, по меньшей мере, серводвигателя;
узел (6) передачи движения, выполненный с возможностью механически связывать указанный серводвигательный блок (5) с подвижными контактами (4) указанного одного или более электрических полюсов;
отличающийся тем, что указанный блок (7) управления выполнен с возможностью осуществления способа (100) диагностики для контроля рабочего состояния одного или более компонентов указанных электрических полюсов (2), причем указанный способ (100) диагностики включает следующие этапы:
на основании выбираемой кривой (CIP) оптимального положения, получение (101) одной или более первых кривых (Clv, CIT), характеризующих оптимальные параметры указанного переключающего устройства, во время маневра размыкания или маневра замыкания переключающего устройства;
на основании сигналов (PF, vF, TF) определения, выдаваемых схемой (72) управления с обратной связью указанного блока управления, путем обработки указанного сигнала (θD) состояния серводвигателя, вычисление (102) одной или более вторых кривых (CAv, CAT), характеризующих фактические параметры указанного переключающего устройства, во время маневра размыкания или маневра замыкания указанного переключающего устройства;
выполнение (103) процедуры (150) сравнения между указанными первой и второй кривыми (Clv, CIT, CAv, CAT).
2. Блок управления по п. 1, отличающийся тем, что указанная процедура (150) сравнения включает следующие этапы:
выбор (151) рабочего параметра указанных электрических полюсов, подлежащих контролю;
выбор (152) временного окна (Т1, Т2, Т3, Т4) наблюдения для контроля указанного выбранного рабочего параметра;
выбор первой кривой (Clv, CIT) и второй кривой (CAv, CAT) для контроля указанного выбранного рабочего параметра;
сравнение выбранной первой кривой (Clv, CIT) с выбранной второй кривой (CAv, CAT) в указанном выбранном временном окне (Т1, Т2, Т3, Т4) наблюдения;
опционально, повторение предыдущих этапов для другого выбираемого рабочего параметра указанных электрических полюсов.
3. Блок управления по п. 2, отличающийся тем, что сравнение (154) выбранной первой кривой (Clv, CIT) с выбранной второй кривой (CAv, CAT) в указанном выбранном временном окне (Т1, Т2, Т3, Т4) наблюдения включает:
выбор (1541) первого характеристического значения (А1, A3, t1) выбранной первой кривой (Clv, CIT);
выбор (1542) второго характеристического значения (А2, А4, t2) выбранной второй кривой (CAv, CAT);
вычисление (1543) значения (Δ1, Δ2, Δ3) отклонения между соответствующими выбранными первым и вторым характеристическими значениями.
4. Блок управления по п. 2 или 3, отличающийся тем, что указанные первые кривые (C1v, С1τ) характеризуют оптимальные профили скорости и усилия срабатывания указанных подвижных контактов (4) во время маневра размыкания или маневра замыкания переключающего устройства.
5. Блок управления по любому из пп. 2-4, отличающийся тем, что указанные вторые кривые (C2v, С2τ) характеризуют фактические профили скорости и усилия срабатывания указанных подвижных контактов (4) во время маневра размыкания или маневра замыкания переключающего устройства.
6. Блок управления по любому из предшествующих пунктов, отличающийся тем, что он содержит первую схему (71) управления, выполненную с возможностью выдачи референсного сигнала (PR) положения, характеризующего референсное положение для указанных подвижных контактов, при этом указанная первая схема управления выполнена с возможностью вычисления указанного референсного сигнала положения на основании указанной кривой (CIP) оптимального положения, характеризующей требуемый профиль положения для указанных подвижных контактов, во время маневра размыкания или маневра замыкания переключающего устройства.
7. Блок управления по п. 6, отличающийся тем, что он содержит вторую схему (72) управления, выполненную с возможностью приема указанного референсного сигнала (PR) положения и указанного сигнала (θD) состояния серводвигателя и выдачи сигнала (CS) регулирования серводвигателя для управления работой указанного серводвигательного блока, причем указанная вторая схема управления выполнена с возможностью вычисления указанного сигнала регулирования серводвигателя на основании указанного референсного сигнала (PR) положения и сигналов (PF, VF, TF) определения, характеризующих фактические параметры указанных подвижных контактов, во время маневра размыкания или маневра замыкания переключающего устройства, причем указанная вторая схема управления выполнена с возможностью вычисления указанных сигналов определения путем обработки указанного сигнала (θD) состояния серводвигателя.
8. Блок управления по п. 6 или 7, отличающийся тем, что указанный блок (7) управления содержит третью схему (73) управления, выполненную с возможностью приема указанного референсного сигнала (PR) положения и выдачи настроечного сигнала (FF), чтобы настраивать один или более сигналов (TR, VR) регулирования, вычисленных указанной второй схемой (72) управления, причем указанная третья схема управления выполнена с возможностью вычисления указанного настроечного сигнала на основании указанного референсного сигнала (PR) положения.
9. Блок управления по п. 7 или 8, отличающийся тем, что указанная вторая схема (72) управления содержит:
первый модуль управления (721) с обратной связью, выполненный с возможностью:
приема указанного референсного сигнала (PR) положения и указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (PF) определения положения, характеризующего фактическое положение указанных подвижных контактов (4), на основании указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (Ре) ошибки положения на основании указанного референсного сигнала (PR) положения и указанного сигнала (PF) определения положения;
вычисления референсного сигнала (vR) скорости, характеризующего референсную скорость для указанных подвижных контактов (4), на основании указанного сигнала (Ре) ошибки положения;
второй модуль (722) управления с обратной связью, выполненный с возможностью:
приема указанного референсного сигнала (vR) скорости и указанного сигнала (θD) определения углового положения;
вычисления сигнала (vF) определения скорости, характеризующего фактическую скорость указанных подвижных контактов (4), на основании указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (Ve) ошибки скорости на основании указанного референсного сигнала (vR) скорости и указанного сигнала (vF) обратной связи по скорости;
вычисления первого референсного сигнала (TR1) усилия срабатывания, характеризующего референсное усилие срабатывания, которое нужно приложить к указанным подвижным контактам, на основании указанного сигнала (ve) ошибки скорости;
третий замкнутый контур (713) управления, выполненный с возможностью:
приема указанного первого референсного сигнала (TR1) усилия срабатывания, указанного сигнала (θD) определения углового положения и указанного настроечного сигнала (FF);
вычисления второго референсного сигнала (TR2) усилия срабатывания, характеризующего референсное усилие срабатывания для указанных подвижных контактов (4), на основании указанного первого референсного сигнала (TR) усилия срабатывания и указанного настроечного сигнала (FF);
вычисления сигнала (TF) определения усилия срабатывания, характеризующего фактическое усилие срабатывания, приложенное к указанным подвижным контактам, на основании указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (Те) ошибки усилия срабатывания на основании указанного второго референсного сигнала (TR2) усилия срабатывания и указанного сигнала (TF) определения усилия срабатывания;
вычисления указанного сигнала (CS) регулирования серводвигателя на основании указанного сигнала (Те) ошибки усилия срабатывания;
во время маневра размыкания или маневра замыкания переключающего устройства.
10. Блок управления по п. 7 или 8, отличающийся тем, что указанная вторая схема (72) управления содержит:
четвертый модуль управления (724) с обратной связью, выполненный с возможностью:
приема указанного референсного сигнала (PR) положения и указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (PF) определения положения, характеризующего фактическое положение указанных подвижных контактов (4), на основании указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (Ре) ошибки положения на основании указанного референсного сигнала (PR) положения и указанного сигнала (PF) определения положения;
вычисления первого референсного сигнала (vR1) скорости, характеризующего референсную скорость для указанных подвижных контактов (4), на основании указанного сигнала (Ре) ошибки положения;
второй модуль (722А) управления с обратной связью, выполненный с возможностью:
приема указанного первого референсного сигнала (vR1) скорости и указанного сигнала (θD) определения углового положения;
вычисления второго референсного сигнала (vR2) скорости, характеризующего референсную скорость для указанных подвижных контактов (4), на основании указанного первого референсного сигнала (vR1) скорости и указанного настроечного сигнала (FF);
вычисления сигнала (vF) определения скорости, характеризующего фактическую скорость указанных подвижных контактов (4), на основании указанного сигнала (θD) состояния серводвигателя;
вычисления сигнала (ve) ошибки скорости на основании указанного второго референсного сигнала (vR2) скорости и указанного сигнала (vF) обратной связи по скорости;
вычисления указанного сигнала (CS) регулирования серводвигателя на основании указанного сигнала (ve) ошибки скорости; во время маневра размыкания или маневра замыкания переключающего устройства.
11. Блок управления по любому из пп. 6-10, отличающийся тем, что указанная первая схема (71) управления выполнена с возможностью выбора указанной референсной кривой (CIP) оптимального положения из набора заданных кривых оптимального положения, хранящихся в библиотеке (78).
12. Блок управления по любому из пп. 6-11, отличающийся тем, что указанная первая схема (71) управления выполнена с возможностью осуществления указанного способа (100) диагностики.
13. Переключающее устройство (1) среднего напряжения, отличающееся тем, что оно содержит блок (7) управления по любому из предшествующих пунктов.
14. Способ (100) диагностики для контроля рабочего состояния одного или более компонентов одного или более электрических полюсов (2) переключающего устройства (1) среднего напряжения,
причем указанное переключающее устройство содержит указанные электрические полюса (2), каждый из которых выполнен с возможностью электрической связи с соответствующей электрической линией,
при этом указанное переключающее устройство дополнительно содержит:
для каждого электрического полюса, неподвижный контакт (3) и подвижный контакт (4), причем указанный подвижный контакт является реверсивно перемещаемым между положением разъединения с указанным неподвижным контактом и положением соединения с указанным неподвижным контактом, причем указанный подвижный контакт является перемещаемым из указанного положения разъединения в указанное положение соединения во время маневра замыкания переключающего устройства и перемещаемым из указанного положения соединения в указанное положение разъединения во время маневра размыкания переключающего устройства;
серводвигательный блок (5), содержащий, по меньшей мере, серводвигатель (51) и выполненный с возможностью выдавать сигнал (θD) состояния серводвигателя, характеризующий угловое положение указанного, по меньшей мере, серводвигателя;
узел (6) передачи движения, выполненный с возможностью механически связывать указанный серводвигательный блок (5) с подвижными контактами (4) указанного одного или более электрических полюсов;
блок (7) управления для управления работой указанного переключающего устройства;
отличающийся тем, что он включает следующие этапы:
на основании выбираемой кривой (CIP) оптимального положения, получают (101) одну или более первых кривых (Clv, CIT), характеризующих оптимальные параметры указанного переключающего устройства, во время маневра размыкания или маневра замыкания переключающего устройства;
на основании сигналов (PF, vF, TF) определения, выдаваемых схемой (72) управления с обратной связью указанного блока управления, путем обработки указанного сигнала (θD) состояния серводвигателя, вычисляют (102) одну или более вторых кривых (CAv, CAT), характеризующих фактические параметры указанного переключающего устройства во время маневра размыкания или маневра замыкания указанного переключающего устройства;
выполняют (103) процедуру (150) сравнения между указанными первой и второй кривыми (Clv, CIT, CAv, CAT).
15. Способ диагностики по п. 14, отличающийся тем, что указанная процедура (150) сравнения включает следующие этапы:
выбирают (151) рабочий параметр указанных электрических полюсов, подлежащий контролю;
выбирают (152) временное окно (Т1, Т2, Т3, Т4) наблюдения для контроля указанного выбранного рабочего параметра;
выбирают первую кривую (Clv, CIT) и вторую кривую (CAv, CAT) для контроля указанного выбранного рабочего параметра;
сравнивают выбранную первую кривую (Clv, CIT) с выбранной второй кривой (CAv, CAT) в указанном выбранном временном окне (Т1, Т2, Т3, Т4) наблюдения;
опционально, повторяют предыдущие этапы для другого выбираемого рабочего параметра указанных электрических полюсов.
16. Способ диагностики по п. 15, отличающийся тем, что указанный этап сравнения выбранной первой кривой (Clv, CIT) с соответствующей выбранной второй кривой (CAv, CAT) в указанном выбранном временном окне (Т1, Т2, Т3) наблюдения включает следующее:
выбирают (1541) первое характеристическое значение (А1, A3, t1) выбранной первой кривой (Clv, CIT);
выбирают (1542) второе характеристическое значение (А2, А4, t2) выбранной второй кривой (CAv, CAT);
вычисляют (1543) значение (Δ1, Δ2, Δ3) отклонения между соответствующими выбранными первым и вторым характеристическими значениями.
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ СОСТОЯНИЯ ПЕРЕКЛЮЧАЮЩЕГО УСТРОЙСТВА | 2013 |
|
RU2598897C2 |
| Отсчетное устройство для механизма вертикальной подачи стола фрезерного станка | 1954 |
|
SU103038A1 |
| Способ регулировки контактных нажатий контактных пружин электромагнитного реле и устройство для его осуществления | 1976 |
|
SU675464A1 |
| СПОСОБ ПОЛУЧЕНИЯ БИОДОБАВКИ ИЗ КОСТНОЙ ТКАНИ РЫБ | 2015 |
|
RU2603922C1 |
| US 6291911 B1, 18.09.2001 | |||
| WO 2018141534 A1, 09.08.2018. | |||
