Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству поиска маршрута и способу поиска маршрута, которые осуществляют поиск основанного на полосах движения маршрута поездки.
Уровень техники
[0002] Для устройства, выполненного с возможностью направлять транспортное средство по указанному маршруту, предлагается технология, в которой дороги для поездки указываются, и затем маршрут поездки указывается из полос движения каждой из указанных дорог (см. патентную литературу 1). Это может улучшать точность направления по маршруту, в то же время уменьшая нагрузку обработки поиска основанного на полосах движения маршрута.
Список ссылок
Патентные документы
[0003] Патентный документ 1. Публикация японской патентной заявки № 2006-266865
Сущность изобретения
Техническая задача
[0004] Однако, технология, описанная в патентной литературе 1, имеет следующую проблему. Устройство выбирает каждую дорогу для поездки с использованием параметра затрат на поездку и информации о дорожных пробках. Соответственно, пока устройство не выберет каждую дорогу, включая полосу движения, оптимальную в качестве маршрута, устройство не может указывать оптимальный маршрут, даже если оно указывает маршрут поездки из полос движения на выбранной дороге. Например, дорога, на которой только одна из множества полос движения перегружена, определяется как перегруженная дорога и не выбирается в качестве дороги для указания маршрута поездки.
[0005] В свете проблемы, описанной выше, задачей настоящего изобретения является предоставление устройства поиска маршрута и способа поиска маршрута, которые могут улучшать эффективность и точность поиска основанного на полосах движения маршрута.
Решение задачи
[0006] Устройство поиска маршрута вычисляет основанные на дорогах затраты на поездку для маршрутов, достигающих пункта назначения из текущей позиции, извлекает основанные на дорогах возможные маршруты, имеющие основанные на дорогах затраты на поездку, равные или меньшие, чем предварительно определенное пороговое значение, и вычисляет основанные на полосах движения затраты на поездку для каждого из возможных маршрутов на основе информации о дорожном движении и определяет основанный на полосах движения маршрут поездки на основе основанных на полосах движения затрат на поездку. Устройство поиска маршрута извлекает маршрут с кратчайшим расстоянием, маршрут с кратчайшим требуемым временем без учета информации о дорожном движении и маршрут с кратчайшим требуемым временем с учетом информации о дорожном движении в качестве возможных маршрутов с предварительно определенным условием.
Преимущества изобретения
[0007] Настоящее изобретение может предоставлять устройство поиска маршрута и способ поиска маршрута, которые могут улучшать эффективность и точность поиска основанного на полосах движения маршрута посредством выбора основанного на полосах движения маршрута поездки из множества основанных на дорогах возможных маршрутов.
Краткое описание чертежей
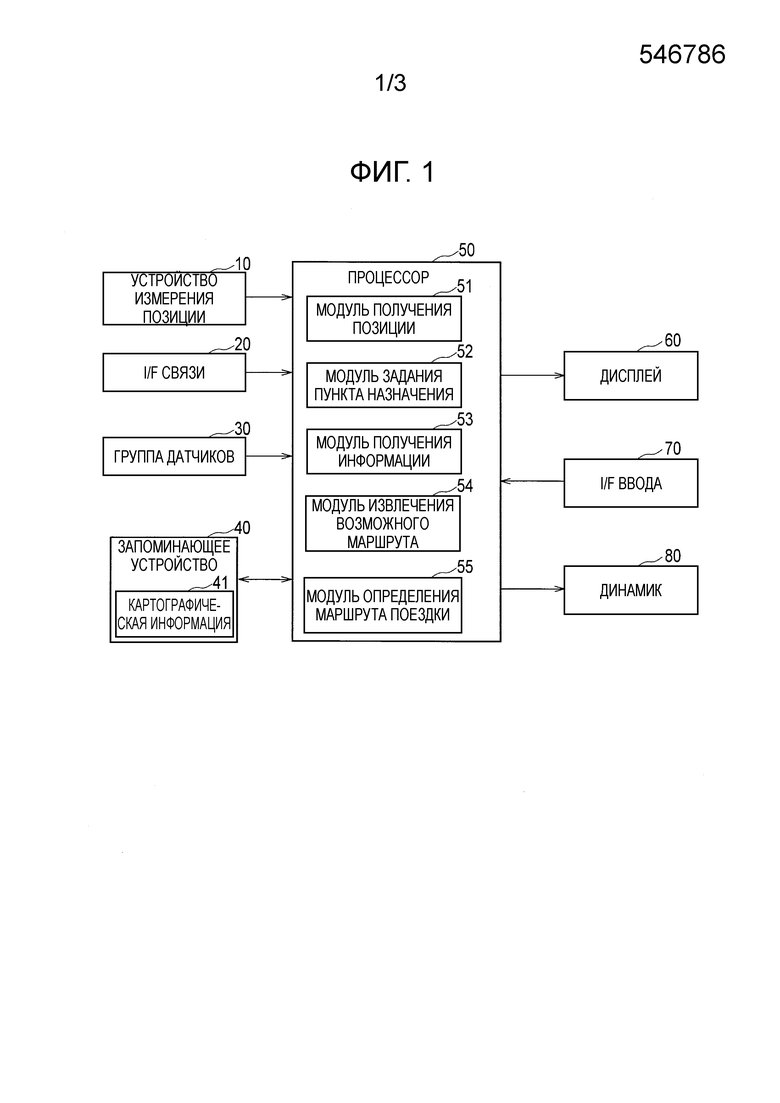
[0008] Фиг. 1 - это блок-схема, объясняющая пример конфигурации устройства поиска маршрута согласно варианту осуществления настоящего изобретения.
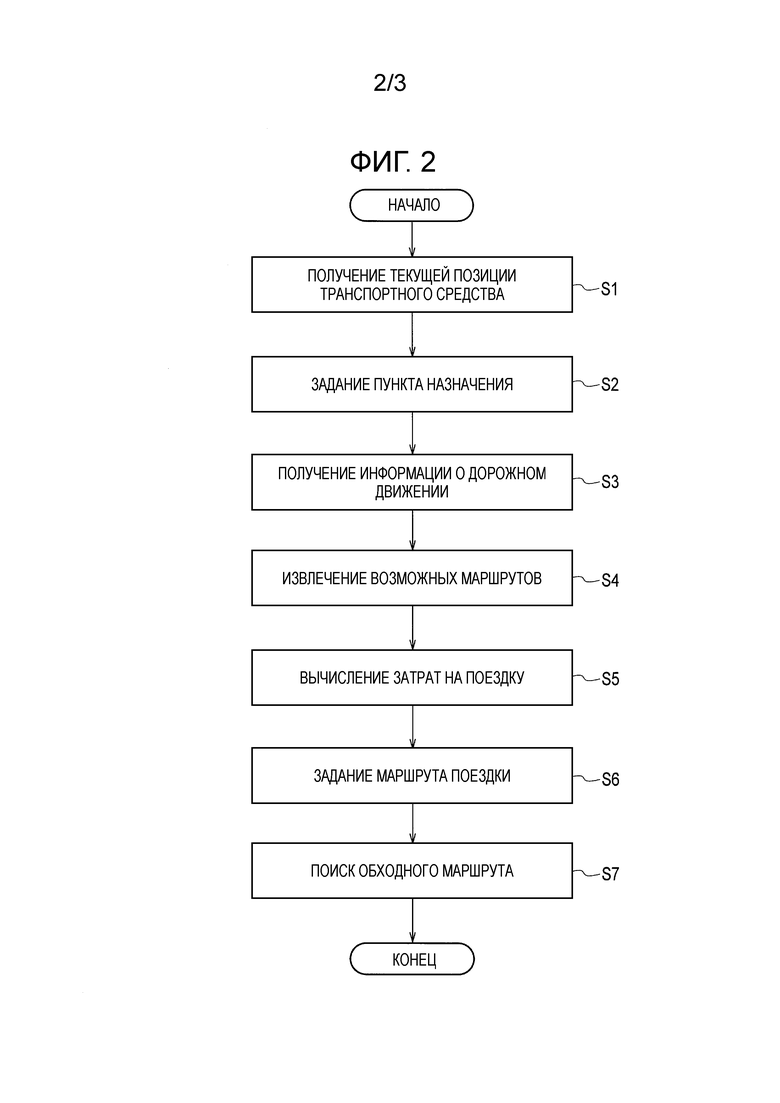
Фиг. 2 - это блок-схема последовательности операций, объясняющая способ поиска маршрута, выполняемый устройством поиска маршрута согласно варианту осуществления настоящего изобретения.
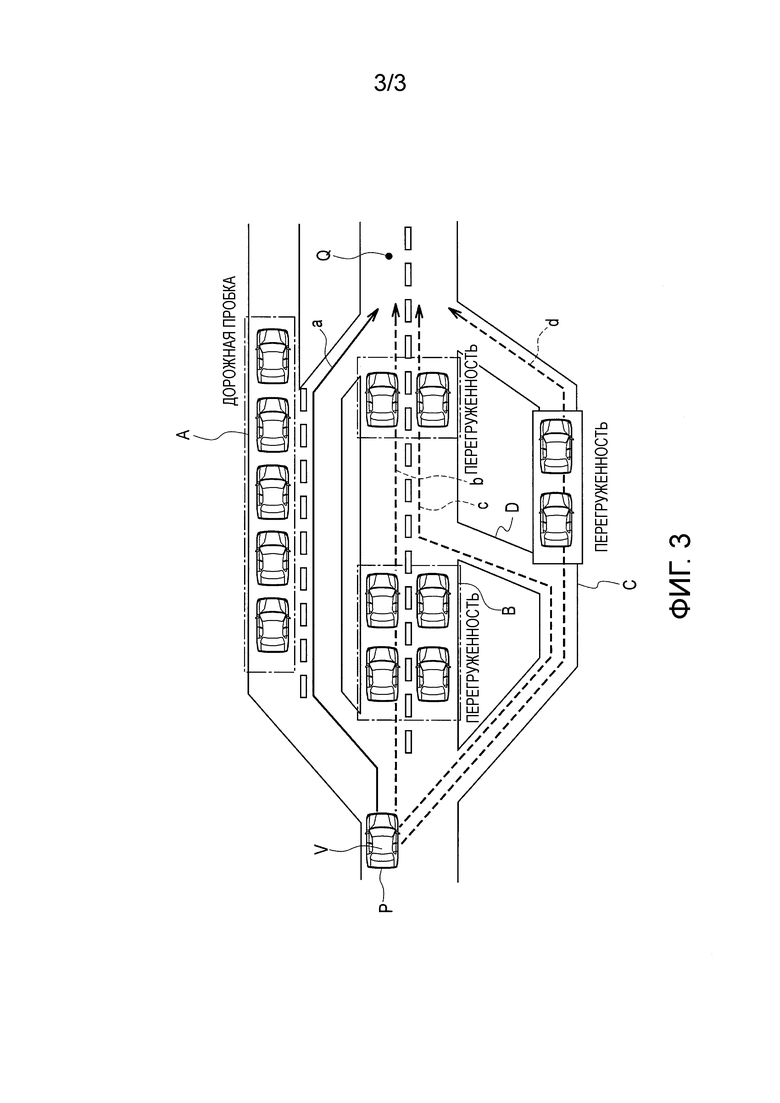
Фиг. 3 - это вид, объясняющий работу устройства поиска маршрута согласно варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании чертежей, идентичные или аналогичные части обозначаются посредством идентичных или аналогичных ссылок с номерами, и перекрывающееся описание опускается.
[0010] (Устройство поиска маршрута)
Как иллюстрировано на фиг. 1, устройство поиска маршрута согласно варианту осуществления включает в себя устройство 10 измерения позиции, интерфейс (I/F) 20 связи, группу 30 датчиков, запоминающее устройство 40, процессор 50, дисплей 60, I/F 70 ввода и динамик 80. Например, устройство поиска маршрута согласно варианту осуществления настоящего изобретения устанавливается в транспортном средстве V (см. фиг. 3) и осуществляет поиск основанного на полосах движения маршрута поездки.
[0011] Устройство 10 измерения позиции измеряет текущую позицию с помощью системы позиционирования, такой как система глобального позиционирования (GPS). Устройство 10 измерения позиции включает в себя, например, GPS-приемник. Устройство 10 измерения позиции выводит измеренную текущую позицию в процессор 50 раз за разом.
[0012] I/F 20 связи является, например, блоком связи, который беспроводным образом обменивается сигналами с внешним окружением. I/F 20 связи может принимать, например, информацию о дорожном движении по каждой из различных полос движения извне с помощью интеллектуальной транспортной системы (ITS), которая отправляет информацию о дорожном движении, такую как информация о дорожных пробках, информация управления дорожным движением и предупреждающую информацию, метеорологическую информацию и т.п. в реальном времени. ITS включает в себя VICS (система автомобильной информации и связи: зарегистрированная торговая марка), интегрированные средства обработки и передачи информации и т.п. I/F 20 связи выводит принятую информацию в процессор 50 раз за разом.
[0013] Группа 30 датчиков может быть сконфигурирована посредством датчика скорости, датчика ускорения, датчика угловой скорости, датчика угла поворота рулевого колеса и т.п. Группа 30 датчиков определяет скорость транспортного средства V, ускорение по трем осям и угловую скорость транспортного средства V в трехмерной декартовой системе координат и т.п. с помощью датчиков и выводит обнаруженные результаты в процессор 50 раз за разом. Группа 30 датчиков может включать в себя датчик изображения, который захватывает изображение вокруг транспортного средства V, датчик расстояния, такой как лазерный дальномер (LRF), который обнаруживает расстояние от транспортного средства V до цели и направление, в котором цель присутствует, датчик угла направления, который обнаруживает угол направления транспортного средства V, и т.п.
[0014] Запоминающее устройство 40 хранит картографическую информацию 41, включающую в себя полосы движения на каждой дороге. Запоминающее устройство 40 может быть сконфигурировано посредством полупроводниковой памяти, магнитного диска или т.п. Запоминающее устройство 40 может включать в себя информацию о признаках, присутствующих вокруг дорог. Запоминающее устройство 40 может также хранить программы, необходимые для обработки, выполняемой процессором 50. Запоминающее устройство 40 может быть сконфигурировано посредством одной части аппаратных средств или множества частей аппаратных средств.
[0015] Процессор 50 включает в себя модуль 51 получения позиции, модуль 52 задания пункта назначения, модуль 53 получения информации, модуль 54 извлечения возможного маршрута и модуль 55 определения маршрута поездки. Процессор 50 может быть сконфигурирован, например, посредством микроконтроллера, который является интегральной схемой, включающей в себя центральный процессор (CPU), память, I/F ввода/вывода и т.п. В этом случае множество процессоров (51-55) информации, конфигурирующих процессор 50, реализуются посредством CPU, исполняющего компьютерную программу, установленную заранее в микроконтроллере. Части, конфигурирующие процессор 50, могут быть сконфигурированы посредством объединенной части аппаратных средств или отдельных частей аппаратных средств. Микроконтроллер может служить также, например, как электронный блок управления (ECU), используемый для другого управления, ассоциированного с транспортным средством V, таким как автоматическое управление движением.
[0016] Дисплей 60 отображает изображения и символы согласно управлению посредством процессора 50, чтобы представлять различные части информации пассажиру транспортного средства V. Дисплей 60 формируется, например, из дисплея, такого как жидкокристаллический дисплей. Дисплей 60 отображает карту области вокруг транспортного средства V, которая включает в себя дороги, записанные в картографической информации 41, и полосы движения на каждой дороге согласно управлению процессора 50.
[0017] I/F 70 ввода, например, принимает операции, выполняемые пользователем, и выводит сигналы, соответствующие операциям, в процессор 50. Операции, выполняемые в I/F 70 ввода, могут быть выполнены голосом. Дисплей 60 и I/F 70 ввода могут быть сформированы объединенным образом как дисплей с сенсорной панелью. Динамик 80 воспроизводит голоса и звуки согласно управлению посредством процессора 50, чтобы представлять различные части информации пассажиру транспортного средства V.
[0018] (Способ поиска маршрута)
Пример операций устройства поиска маршрута согласно варианту осуществления описывается со ссылкой на блок-схему последовательности операций на фиг. 2.
[0019] На этапе S1 модуль 51 получения позиции получает текущую позицию транспортного средства V в картографической информации 41 на основе текущей позиции, которая измеряется посредством устройства 10 измерения позиции, и интервала перемещения транспортного средства V и позиции транспортного средства V относительно признаков, которые обнаруживаются посредством группы 30 датчиков.
[0020] На этапе S2 модуль 52 задания пункта назначения задает пункт назначения, который должен быть достигнут транспортным средством V, в картографической информации 41, на основе, например, операции, выполняемой пользователем в I/F 70 ввода.
[0021] На этапе S3 модуль 53 получения информации получает информацию о дорожном движении по каждой полосе движения вокруг транспортного средства V от I/F 20 связи. Информация о дорожном движении по каждой полосе движения является, например, информацией о дорожной пробке, указывающую дорожную пробку и затор, информацию управления дорожным движением, указывающую управление дорожным движением, и т.п.
[0022] На этапе S4 модуль 54 извлечения возможного маршрута извлекает множество основанных на дорогах возможных маршрутов из картографической информации 41 на основе предварительно определенных условий, каждый из возможных маршрутов достигает пункта назначения, заданного посредством модуля 52 задания пункта назначения, из текущей позиции транспортного средства V, полученной посредством модуля 51 получения позиции. Например, модуль 54 извлечения возможного маршрута вычисляет основанные на дорогах затраты на поездку для маршрутов, достигающих пункта назначения из текущей позиции, и извлекает возможные маршруты на основе затрат на поездку. Время, требуемое для поездки по маршруту, расход топлива, плата за проезд, расстояние и т.п. могут быть использованы в качестве основанных на дорогах затрат на поездку. Затраты на поездку вычисляются на основе типа дороги, информации о дорожном движении, типа транспортного средства и т.п.
[0023] Например, модуль 54 извлечения возможного маршрута извлекает дорогу с кратчайшим расстоянием поездки, дорогу с кратчайшим временем поездки без учета информации о дорожном движении и дорогу с кратчайшим временем поездки с учетом информации о дорожном движении из картографической информации 41 в качестве трех возможных маршрутов. Кроме того, модуль 54 извлечения возможного маршрута может извлекать, в дополнение к дороге с наименьшими затратами на поездку, множество дорог, чьи затраты на поездку равны или меньше предварительно определенного порогового значения, в качестве возможных маршрутов.
[0024] На этапе S5 модуль 55 определения маршрута поездки вычисляет основанные на полосах движения затраты на поездку для каждого из возможных маршрутов, извлеченных посредством модуля 54 извлечения возможного маршрута, на основе картографической информации 41 и информации о дорожном движении. Основанные на полосах движения затраты на поездку являются, например, временем, требуемым для поездки по маршруту.
[0025] На этапе S6 модуль 55 определения маршрута поездки выбирает основанный на полосах движения маршрут поездки из возможных маршрутов, извлеченных посредством модуля 54 извлечения возможного маршрута, на основе основанных на полосах движения затрат на поездку, вычисленных на этапе S5. Например, модуль 55 определения маршрута поездки определяет возможный маршрут с наименьшими затратами на поездку в качестве маршрута поездки.
[0026] На этапе S7, когда маршрут поездки, определенный на этапе S6, включает в себя участок с дорожной пробкой, указанный посредством информации о дорожном движении, модуль 55 определения маршрута поездки осуществляет поиск обходного маршрута, который обходит участок с дорожной пробкой. Модуль 55 определения маршрута поездки вычисляет основанные на полосах движения затраты на поездку для каждого найденного обходного маршрута и сравнивает вычисленные затраты на поездку с затратами на поездку для маршрута поездки, определенного на этапе S6. Когда существует обходной маршрут, затраты которого на поездку ниже затрат на поездку для маршрута поездки, определенного на этапе S6, модуль 55 определения маршрута поездки может определять обходной маршрут с наименьшими затратами на поездку в качестве окончательного маршрута поездки.
[0027] Например, как иллюстрировано на фиг. 3, предположим, что модуль 54 извлечения возможного маршрута извлекает четыре основанных на дорогах возможных маршрута a-d для текущей позиции P транспортного средства V, полученной посредством модуля 51 получения позиции, и пункта Q назначения, заданного посредством модуля 52 задания пункта назначения. Возможный маршрут a является маршрутом, который ответвляется от дороги B, по которой транспортное средство V движется, на дорогу A, и затем сливается снова с дорогой B. Возможный маршрут b является дорогой B. Возможный маршрут c является маршрутом, который ответвляется от дороги B на дорогу C и затем сливается с дорогой B через дорогу D. Возможный маршрут d является маршрутом, который ответвляется от дороги B на дорогу C и затем сливается снова с дорогой B.
[0028] В этом случае модуль 55 определения маршрута поездки вычисляет затраты на поездку для каждой из полос движения, включенных в возможные маршруты a-d, и определяет маршрут по правой полосе движения дороги A с наименьшими затратами на поездку на возможном маршруте a в качестве маршрута поездки. Например, модуль 55 определения маршрута поездки может вычислять основанные на полосах движения затраты на поездку только для участков, указанных посредством информации о дорожных пробках на возможных маршрутах.
[0029] В целом, дорога A, включающая в себя полосу движения, которая перегружена, и полосу движения, которая не перегружена, считается просто перегруженной дорогой и не выбирается в качестве оптимального пути. Возможный маршрут c, таким образом, вероятно должен быть определен в качестве оптимального маршрута.
[0030] Между тем, поскольку устройство поиска маршрута согласно варианту осуществления настоящего изобретения извлекает множество возможных маршрутов на основе предварительно определенных условий, устройство поиска маршрута может точно находить оптимальный маршрут, вычисляя основанные на полосах движения затраты на поездку для каждого возможного маршрута. Кроме того, поскольку устройство поиска маршрута согласно варианту осуществления настоящего изобретения извлекает множество основанных на дорогах возможных маршрутов и затем вычисляет основанные на полосах движения затраты на поездку для соответствующих возможных маршрутов, устройство поиска маршрута может препятствовать тому, что нагрузка по обработке поиска основанного на полосах движения маршрута становится большой, и эффективно искать оптимальный маршрут поездки.
[0031] Как описано выше, устройство поиска маршрута согласно варианту осуществления настоящего изобретения вычисляет основанные на полосах движения затраты на поездку для множества основанных на дорогах возможных маршрутов и выбирает основанный на полосах движения маршрут поездки из множества возможных маршрутов. Следовательно, устройство поиска маршрута согласно варианту осуществления настоящего изобретения может улучшать эффективность и точность поиска основанного на полосах движения маршрута.
[0032] Кроме того, когда какой-либо из возможных маршрутов включает в себя участок с дорожной пробкой, устройство поиска маршрута согласно варианту осуществления настоящего изобретения вычисляет основанные на полосах движения затраты на поездку только для участка с дорожной пробкой. Устройство поиска маршрута согласно варианту осуществления настоящего изобретения может, таким образом, уменьшать нагрузку по обработке при поиске маршрута.
[0033] Кроме того, когда маршрут поездки включает в себя участок с дорожной пробкой, устройство поиска маршрута согласно варианту осуществления настоящего изобретения осуществляет поиск обходного маршрута, обходящего участок с дорожной пробкой. Соответственно, когда определенный маршрут поездки включает в себя участок с дорожной пробкой, устройство поиска маршрута согласно варианту осуществления настоящего изобретения может искать маршрут поездки, который является более оптимальным.
[0034] Кроме того, устройство поиска маршрута согласно варианту осуществления настоящего изобретения извлекает маршрут с кратчайшим расстоянием поездки, маршрут с кратчайшим временем поездки без учета информации о дорожном движении и маршрут с кратчайшим временем поездки с учетом информации о дорожном движении в качестве множества возможных маршрутов. Устройство поиска маршрута согласно варианту осуществления настоящего изобретения может, таким образом, уменьшать возможность исключения оптимального маршрута из возможных маршрутов в таких случаях, когда маршруты с кратчайшим требуемым временем, неучитывающие расстояние и информацию о дорожных пробках, все включают в себя участок с дорожной пробкой.
[0035] Кроме того, в устройстве поиска маршрута согласно варианту осуществления настоящего изобретения, степень вклада информации о дорожном движении в основанные на дорогах затраты на поездку, используемым для извлечения возможных маршрутов, ниже степени вклада информации о дорожном движении в основанные на полосах движения затраты на поездку, используемые для определения маршрута поездки. Устройство поиска маршрута согласно варианту осуществления настоящего изобретения может, таким образом, уменьшать возможность исключения оптимального маршрута из возможных маршрутов в таких случаях, когда маршруты с кратчайшим требуемым временем, неучитывающие расстояние и информацию о дорожных пробках, все включают в себя участок с дорожной пробкой.
[0036] (Другие варианты осуществления)
Хотя настоящее изобретение описано выше посредством использования вышеуказанного варианта осуществления, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого описания изобретения различные альтернативные варианты осуществления, примеры и операционные техники будут найдены специалистами в области техники.
[0037] Например, в варианте осуществления, описанном выше, текущая позиция транспортного средства V не ограничивается текущей позицией, полученной с помощью устройства 10 измерения позиции и группы 30 датчиков. Модуль 51 получения позиции может получать, в качестве текущей позиции, начальную точку, которая задается аналогично пункту назначения в местоположении, отличном от текущей позиции.
[0038] Кроме того, настоящее изобретение включает в себя различные варианты осуществления и т.п., которые не описаны в данном документе, такие как конфигурации, взаимно применяющие вышеупомянутые конфигурации, как само собой разумеется. Соответственно, объем настоящего изобретения должен определяться только посредством предметов, задающих изобретение в пределах объема формулы изобретения, считающегося надлежащим на основе описания.
[0039] Кроме того, функции, описанные в варианте осуществления настоящего изобретения, могут быть выполнены посредством одной или множества схем обработки. Схема обработки включает в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Схема обработки может включать в себя устройства, такие как компоненты схемы и специализированная интегральная схема (ASIC), предназначенные, чтобы выполнять описанные функции.
Промышленная применимость
[0040] Настоящее изобретение может предоставлять устройство поиска маршрута и способ поиска маршрута, которые могут улучшать эффективность и точность поиска основанного на полосах движения маршрута посредством выбора основанного на полосах движения маршрута поездки из множества основанных на дорогах возможных маршрутов.
Список ссылочных знаков
[0041] 40 запоминающее устройство
41 картографическая информация
51 модуль получения позиции
52 модуль задания пункта назначения
53 модуль получения информации
54 модуль извлечения возможного маршрута
55 модуль определения маршрута поездки
Предложенная группа изобретений относится к средствам для определения маршрута от исходного пункта до пункта назначения. Устройство поиска маршрута содержит запоминающее устройство для хранения картографической информации, в том числе о полосах движения на каждой из дорог; модуль получения позиции, определяющий текущую позицию транспортного средства; модуль задания пункта назначения; модуль получения информации о дорожном движении по каждой из полос движения; модуль извлечения возможного маршрута для определения затрат на поездку и выбора маршрутов на основе предварительно определенного условия, у которых затраты на поездку равны или меньше, чем предварительно определенное пороговое значение; и модуль определения маршрута поездки, выполненный с возможностью вычислять затраты на поездку для каждого из возможных маршрутов на основе информации о дорожном движении с учетом полос движения. При этом модуль извлечения возможного маршрута извлекает маршрут с кратчайшим расстоянием, маршрут с кратчайшим требуемым временем без учета информации о дорожном движении и маршрут с кратчайшим требуемым временем с учетом информации о дорожном движении в качестве возможных маршрутов с предварительно определенным условием на основании основанных на дорогах затрат на поездку. Данное устройство также реализует и соответствующий способ поиска маршрута. Указанная группа изобретений позволяет повысить эффективность и точность поиска оптимального маршрута. 2 н. и 3 з.п. ф-лы, 3 ил. 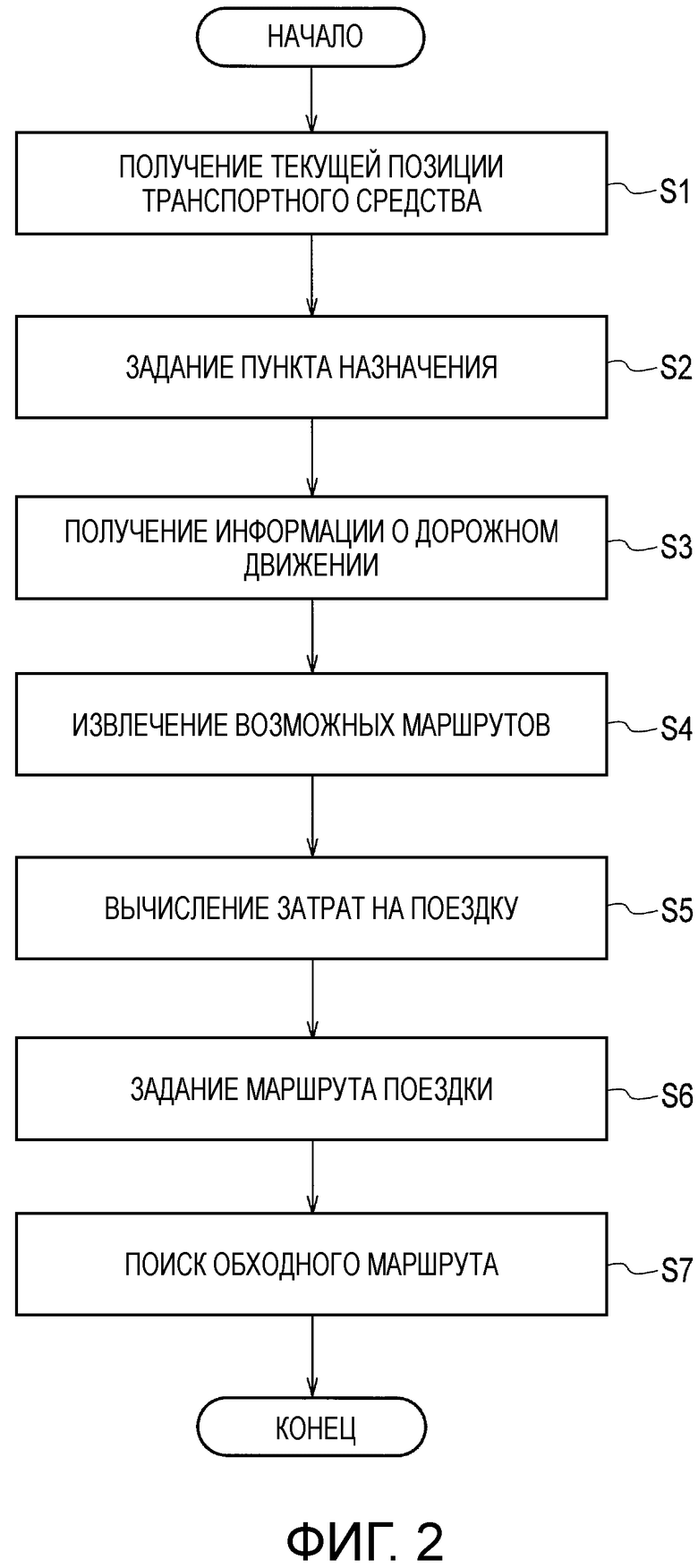
1. Устройство поиска маршрута, содержащее:
запоминающее устройство, выполненное с возможностью хранить картографическую информацию, включающую в себя полосы движения на каждой из дорог;
модуль получения позиции, выполненный с возможностью получать текущую позицию транспортного средства в картографической информации;
модуль задания пункта назначения, выполненный с возможностью задавать пункт назначения транспортного средства в картографической информации;
модуль получения информации, выполненный с возможностью получать информацию о дорожном движении по каждой из полос движения;
модуль извлечения возможного маршрута, выполненный с возможностью вычислять основанные на дорогах затраты на поездку для маршрутов, достигающих пункта назначения из текущей позиции, на основе предварительно определенного условия и извлекать основанные на дорогах возможные маршруты, имеющие основанные на дорогах затраты на поездку, равные или меньшие, чем предварительно определенное пороговое значение, из картографической информации; и
модуль определения маршрута поездки, выполненный с возможностью вычислять основанные на полосах движения затраты на поездку для каждого из возможных маршрутов на основе информации о дорожном движении и определять основанный на полосах движения маршрут поездки на основе основанных на полосах движения затрат на поездку,
при этом модуль извлечения возможного маршрута извлекает маршрут с кратчайшим расстоянием, маршрут с кратчайшим требуемым временем без учета информации о дорожном движении и маршрут с кратчайшим требуемым временем с учетом информации о дорожном движении в качестве возможных маршрутов с предварительно определенным условием на основании основанных на дорогах затрат на поездку.
2. Устройство поиска маршрута по п. 1, в котором по какому-либо из возможных маршрутов, включающих в себя участок с дорожной пробкой, указанный посредством информации о дорожном движении, модуль определения маршрута поездки вычисляет основанные на полосах движения затраты на поездку только для участка с дорожной пробкой.
3. Устройство поиска маршрута по п. 1 или 2, в котором при маршруте поездки, включающем в себя участок с дорожной пробкой, указанный посредством информации о дорожном движении, модуль определения маршрута поездки осуществляет поиск обходного маршрута, обходящего участок с дорожной пробкой.
4. Устройство поиска маршрута по п. 1 или 2, в котором
модуль извлечения возможного маршрута вычисляет, в качестве предварительно определенного условия, основанные на дорогах затраты на поездку для маршрутов, достигающих пункта назначения из текущей позиции, на основе информации о дорожном движении и извлекает возможные маршруты на основе основанных на дорогах затрат на поездку, и
степень вклада информации о дорожном движении в основанные на дорогах затраты на поездку ниже степени вклада информации о дорожном движении в основанные на полосах движения затраты на поездку.
5. Способ поиска маршрута, содержащий этапы, на которых
получают текущую позицию транспортного средства в картографической информации, включающей в себя полосы движения каждой из дорог;
задают пункт назначения транспортного средства в картографической информации;
получают информацию о дорожном движении по каждой из полос движения;
вычисляют основанные на дорогах затраты на поездку для маршрутов, достигающих пункта назначения из текущей позиции, на основе предварительно определенного условия и извлекают основанные на дорогах возможные маршруты, имеющие основанные на дорогах затраты на поездку, равные или меньшие, чем предварительно определенное пороговое значение, из картографической информации; и
вычисляют основанные на полосах движения затраты на поездку для каждого из возможных маршрутов на основе информации о дорожном движении и определяют основанный на полосах движения маршрут поездки на основе основанных на полосах движения затрат на поездку,
при этом маршрут с кратчайшим расстоянием, маршрут с кратчайшим требуемым временем без учета информации о дорожном движении и маршрут с кратчайшим требуемым временем с учетом информации о дорожном движении извлекаются в качестве возможных маршрутов с предварительно определенным условием на основании основанных на дорогах затрат на поездку.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

