Область техники, к которой относится изобретение
Данное изобретение относится к системе определения экономного маршрута транспортного средства.
Уровень техники
В настоящее время многие водители имеют навигационную систему, предусмотренную в транспортном средстве, или навигационную систему, приобретенную ими отдельно и установленную в транспортное средство. Такие системы основываются на Глобальной навигационной системе (GPS). Данные карт для таких систем могут быть предустановлены до приобретения системы пользователем. Альтернативно или дополнительно данные карт могут периодически или динамически поступать в системы.
В подобной системе водителю могут быть представлены направления на основе координат, передаваемых на устройство, находящееся вне транспортного средства, например, помимо прочего, на сервер. Сервер может выполнять вычисления направления транспортного средства и загружать данные в бортовую систему, например FORD SYNC, для вывода водителю.
В любом из этих решений рассматриваемая система может использовать данные карт, собранные третьей стороной. Эти данные, кроме прилагаемых карт дорог, также могут включать дополнительную информацию, например ограничение скорости на дороге. Ограничение скорости может быть выражено одним значением скорости или диапазоном скоростей. Например, если система пытается вычислить самый быстрый маршрут между точками А и В, она может проанализировать ряд маршрутов. Используя скоростные данные, связанные с каждой дорогой, и расстояние, проходимое по каждой возможной дороге, система определит самый быстрый возможный маршрут. В качестве помощи в этом определении также могут быть доступны динамические данные дорожного движения в местоположениях.
В качестве альтернативы система может выбрать вычисление кратчайшего маршрута или маршрута, исключающего определенные дороги (например, автомагистрали или грунтовые дороги). Используя дорожные данные (классификации и т.п.), система может исключать дороги определенных типов. Кроме того, используя «чистые» расстояния, которые должны быть пройдены, система может вычислять кратчайший маршрут до пункта, даже если он не является самым быстрым маршрутом.
Из уровня техники известен способ определения экономного маршрута транспортного средства (US 2010/0010732 A1, 14.01.2010, G01C 21/36), который предусматривает использование контроллера трансмиссии, обеспечивающего электронную навигационную систему информацией о прогнозируемом расходе топлива в зависимости от скорости автомобиля, оборотов двигателя, нагрузки на двигатель, температуры окружающей среды и других факторов. Однако данный способ не позволяет учитывать данные о дополнительной возможности экономии топлива, которая может быть обеспечена генерированием энергии во время движения транспортного средства.
Вся эта информация полезна для водителей и может сделать поездку легче и эффективнее. Однако поскольку имеющиеся данные становятся более комплексными, могут выполняться дополнительные вычисления.
Раскрытие изобретения
В первом показательном осуществлении изобретения способ определения маршрута включает сбор дорожных данных в бортовой системе навигации (VNS) по нескольким маршрутам между двумя пунктами. Этот показательный способ также включает взвешивание двух или более возможных маршрутов в VNS по как минимум дорожным данным.
Также в этом показательном осуществлении способ включает настройку в VNS весов каждого взвешенного маршрута по предполагаемому расходу топлива и определение маршрута, оптимального по расходу топлива, в VNS по настроенным весам.
Наконец, в данной реализации изобретения, показанный способ включает вывод маршрута, оптимального по расходу топлива.
Во втором показательном осуществлении способ определения маршрута включает прием вводимых в бортовую навигационную систему (VNS) команд по определению маршрута с непрерывным движением. Далее, способ включает сбор дорожных данных в VNS по нескольким маршрутам между двумя пунктами и взвешивание двух или более маршрутов в VNS по возможным точкам останова, которые отображаются дорожными данными.
Способ также включает выбор маршрута в VNS, вес которого указывает минимальное вероятное число точек останова. Наконец, способ включает вывод из VNS выбранного маршрута, имеющего минимальное вероятное число точек останова.
В еще одном показательном осуществлении способ определения маршрута включает определение состояния низкого уровня топлива бортовой навигационной системой (VNS) совместно с бортовой вычислительной системой. Способ включает вычисление предполагаемого оставшегося проходимого расстояния по меньшей мере частично по остатку топлива и местоположению, в VNS, одной или нескольких автозаправочных станций в пределах оставшегося проходимого расстояния. Наконец, способ включает предложение через VNS изменить маршрут, включив останов на одной или более автозаправочных станциях.
Краткое описание чертежей
На ФИГ.1 показан пример конфигурации, поясняющей бортовую вычислительную систему, применимую с показательными осуществлениями изобретения;
На ФИГ.2 показан пример процесса определения регенерирующего энергию маршрута навигационной системой;
На ФИГ.3 показан вариант осуществления системы, в которой экономится по меньшей мере заданная величина энергии;
На ФИГ.4 показан показательный процесс вычисления маршрута, экономящего топливо;
На ФИГ.5 показан пример процесса определения маршрута с постоянной скоростью;
НА ФИГ.6А и 6Б показаны примеры процессов систем предупреждения о низком уровне топлива.
Осуществление изобретения
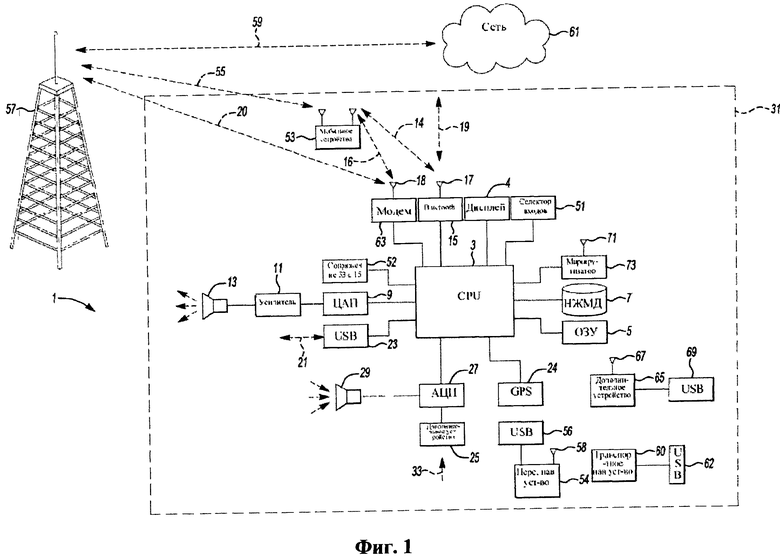
На ФИГ. 1 показан пример блок-схемы бортовой вычислительной системы 1 транспортного средства 31. Транспортное средство, оборудованное бортовой вычислительной системой, может содержать визуальное устройство ввода-вывода 4, размещенное в транспортном средстве. Пользователь также может взаимодействовать через это устройство, если оно оснащено, например, сенсорной панелью. В другом показательном осуществлении взаимодействие происходит посредством нажатия кнопок, подачи голосовых команд и обработки этих команд голосовым синтезатором.
В показательном осуществлении 1, показанном на ФИГ. 1, процессор 3 управляет по меньшей мере частью процесса бортовой вычислительной системы. Установленный в транспортном средстве процессор осуществляет внутреннюю обработку команд и программ. Далее, процессор обменивается информацией как с устройством временного хранения 5, так и с устройством долговременного хранения 7. В этом показательном осуществлении устройством временного хранения является оперативное запоминающее устройство (ОЗУ), а устройством долговременного хранения является жесткий диск (НЖМД) или флэш-память.
В процессоре также предусмотрены несколько различных устройств ввода, позволяющих пользователю взаимодействовать с процессором. В этом показательном осуществлении предусмотрены микрофон 29, дополнительное гнездо ввода 25 (для ввода 33), USB-порт ввода 23, ввод от GPS 24 и ввод по BLUETOOTH 15. Также предусмотрен селектор входов 51, позволяющий пользователю переключаться между различными устройствами ввода. Перед передачей в процессор ввод как с микрофона, так и от дополнительного гнезда преобразуется из аналогового в цифровой сигнал преобразователем 27.
Устройства вывода системы могут включать, помимо прочего, дисплей 4 и громкоговоритель 13 или стереосистему. Громкоговоритель подключен к усилителю 11 и принимает сигнал от процессора 3 через цифроаналоговый преобразователь 9. Выходной сигнал также может подаваться на удаленное устройство BLUETOOTH, например персональное навигационное устройство (ПНУ) 54, или на USB, например транспортное навигационное устройство 60, по двунаправленным каналам данных 19 и 21 соответственно.
В одном показательном осуществлении система 1 использует трансивер BLUETOOTH 15 для связи 17 с мобильным устройством пользователя 53 (например, сотовым телефоном, смартфоном, карманным компьютером). Затем мобильное устройство может использоваться для связи 59 с сетью 61, находящейся вне транспортного средства 31, через, например, канал связи 55 с сотовой вышкой 57. В ряде осуществлений вышкой 57 может быть точка доступа Wi-Fi.
Пример связи между мобильным устройством и трансивером BLUETOOTH представлен сигналом 14.
Сопряжение мобильного устройства 53 с трансивером BLUETOOTH 15 может быть осуществлено нажатием кнопки 52 или через аналогичное устройство ввода. Таким образом, ЦПУ получает информацию, что встроенный трансивер BLUETOOTH сопряжен с трансивером BLUETOOTH мобильного устройства.
Данные могут передаваться между ЦПУ 3 и сетью 61, используя, например, тарифный план, передачу данных вместе с голосом или тоновый набор в соответствии с мобильным устройством 53. Аналогично, может потребоваться добавить встроенный модем 63, имеющий антенну 18, с целью обмена данными 16 между ЦПУ 3 и сетью 61 в голосовой полосе. Тогда мобильное устройство 53 может использоваться для обмена данными 59 с сетью 61 вне транспортного средства 31, например, по каналу связи 55 сотовой вышки 57. В некоторых осуществлениях модем 63 может устанавливать связь 20 с вышкой 57 для обмена данными с сетью 61. В качестве не ограничивающего примера модемом 63 может быть USB-модем сотовой связи, а средством связи 20 может быть сотовая связь.
В одном показательном осуществлении процессор имеет операционную систему, включающую интерфейс прикладного программирования (API) для обмена данными с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может иметь доступ ко встроенному модулю или «зашитым» в ПЗУ программам на трансивере BLUETOOTH для осуществления беспроводной связи с удаленным трансивером BLUETOOTH (например, который находится в мобильном устройстве).
В еще одном осуществлении мобильное устройство 53 включает в себя модем для обмена данными в голосовой или широкой полосе. В осуществлении, использующем передачу данных вместе с голосом, может быть реализовано частотное мультиплексирование, когда пользователь может вести разговор по мобильному устройству и при этом передаются данные. В остальное время, когда пользователь не разговаривает по устройству, передача данных может занимать всю полосу (например, от 300 до 3400 Гц).
Если пользователь использует тарифный план, связанный с мобильным устройством, то возможно, что тарифный план позволяет широкополосную передачу и система может использовать намного более широкую полосу (ускоряя передачу данных). В еще одном осуществлении мобильное устройство 53 заменено устройством сотовой связи (не показано), которое находится в транспортном средстве 31. В другом осуществлении мобильным устройством 53 может быть устройство беспроводной локальной сети (LAN), обеспечивающей связь, например (помимо прочего), по сети 802.1 lg (т.е. WiFi) или сети WiMax.
В одном осуществлении входящие данные могут передаваться через мобильное устройство как данные-вместе-с-голосом (data-over-voice) или тарифный план (data-plan), через встроенный трансивер BLUETOOTH и в бортовой внутренний процессор 3. В случае определенных временных данных, например, данные могут храниться на жестком диске или другом носителе 7 столько времени, сколько они нужны.
Дополнительные источники, которые могут взаимодействовать с транспортным средством, включают персональное навигационное устройство 54, оснащенное, например, USB-портом 56 и/или антенной 58; или бортовое навигационное устройство 60, оснащенное USB 62 или другим портом, встроенным устройством GPS 24 или удаленной навигационной системой (не показана), имеющей связь с сетью 61.
Далее, ЦПУ может связываться с другими дополнительными устройствами 65. Эти устройства могут иметь беспроводное 67 или проводное 69 соединение. Кроме того, или как альтернатива, ЦПУ может подключаться к транспортному средству через беспроводной маршрутизатор 73, используя, например, трансивер WiFi 71. Это позволит ЦПУ связываться с удаленными сетями в диапазоне локального маршрутизатора 73.
По дополнительным данным, которые могут быть текущими картографическими, или данным, которые могут быть доступны по запросу, может выполняться дополнительный выбор маршрута вне рамок настоящих способов.
Маршрут может выбираться совместно с бортовой навигационной системой (VNS). VNS может включать, помимо прочего, встроенную VNS или удаленную VNS, например, устройство ТОМТОМ или GARMIN. Когда через VNS выполняется шаг, это может означать, что VNS действует одна или совместно с другой бортовой системой.
Дополнительно, все рассмотренные здесь способы могут выполняться как последовательность машинных шагов, используя компьютерный программный код, хранимый на носителе, который может считываться компьютером. Носители включают, помимо прочего, DVD, CD, жесткие диски, ОЗУ, ПЗУ и любое другое устройство временного хранения информации, подходящее для данной задачи. Выполнение компьютерного программного кода системой VNS и/или бортовой вычислительной системой может позволить осуществить различные способы.
Во время движения транспортного средства возникают различные сценарии, в которых может быть искомым маршрут, который отличается от просто «самого быстрого».
Например, гибридные автомобили оборудованы рекуперативными системами, которые могут возвращать определенную затраченную энергию и превращать ее в сохраняемую энергию для использования автомобилем. В одном случае в гибридных автомобилях торможение рекуперативное. Таким образом, если автомобиль останавливается в плотном движении и часто тормозит или движется вниз, торможение во время такого движения может заряжать аккумуляторы в автомобиле.
Следовательно, если водитель желает двигаться по маршруту, который может экономить энергию во время движения, процессор маршрутизации может вычислять маршрут, используя данные о возвышениях, на конкретных дорогах. Применяя такие данные, система может определить маршрут, который включает один или несколько уклонов вниз или в общем уменьшает возвышения, чтобы добиться торможения, которое рекуперирует энергию.
В другом случае водитель на гибридном или другом автомобиле может пожелать двигаться с минимально возможным расходом топлива. Это желание основано, как правило, на стремлении не расходовать топливо напрасно. Используя бортовые данные, либо запрограммированные, либо динамически определяемые в течение срока службы автомобиля, система может определять, какой маршрут может быть самым эффективным по расходу топлива. Это может быть основано на нескольких факторах, включая, помимо прочего, фактические или прогнозируемые шаблоны дорожного движения, возвышения, возможные скорости, число светофоров на пути автомобиля и др.
Водители также могут предпочитать маршрут без остановов. Например, замечено, что люди предпочитают маршрут с меньшим числом остановов, даже если он длиннее. Редкие остановы также могут экономить топливо, тогда как ускорение может сжигать очень много топлива. Используя такие, но не ограниченные ими данные, как прогнозируемые или фактические шаблоны дорожного движения, число светофоров, знаков останова и др., система может вычислять маршрут, который включает наименьшее число возможных остановов.
За последнее время также появились водители, называемые «хайпермайлерами». Эти водители пытаются сохранять движение с эффективным расходом топлива, на постоянных скоростях, минимизируя ускорение и остановы. Используя данные по светофорам, данные по плотности движения, скоростям на дорогах и др., система может предсказать маршрут, который, вероятно, будет оптимальным по расходу топлива.
Наконец, в крайних ситуациях, например, когда мало топлива, транспортное средство может динамически определить (или получить сигнал), что необходим полный останов. Система может найти местоположение ближайшей заправочной станции, но может быть так, что система находится в самом конце оставшегося расстояния, подходящего для движения, на основе остатка топлива/энергии в транспортном средстве. Может оказаться так, что только по одному маршруту транспортное средство может достичь заправочной станции, и используя имеющиеся данные и вычисления (например, вышеуказанные) система может вычислить один из нескольких или единственный возможный маршрут достижения заправочной станции без исчерпания топлива. Это вычисление также может выполняться в фоновом режиме и система может предупреждать водителя о том, что можно добраться только до немногих станций, так же как предупреждает о низком уровне топлива, но с более совершенными данными. Также с ухудшением ситуации частота и/или уровень предупреждений может расти.
Дополнительно к этому, характеристики транспортного средства могут изменяться с течением времени. Например, добавление компонентов владельцем или изменение условий, в которых двигатель может улучшить или сократить пробег на литр израсходованного топлива. Таким образом, система может выбрать оценивание на основе величины пробега в милях на галлон израсходованного топлива (или другой меры расхода топлива), который измеряется за ограниченный период или отрезок недавнего времени (последние три месяца, недели и др.). Как альтернатива, система может использовать запрограммированный пробег на единицу топлива, средний срок службы транспортного средства или любую другую подходящую оценку экономии топлива. Далее экономия может быть «приблизительно подсчитана» по прогнозируемым скоростям пути на отрезках маршрута.
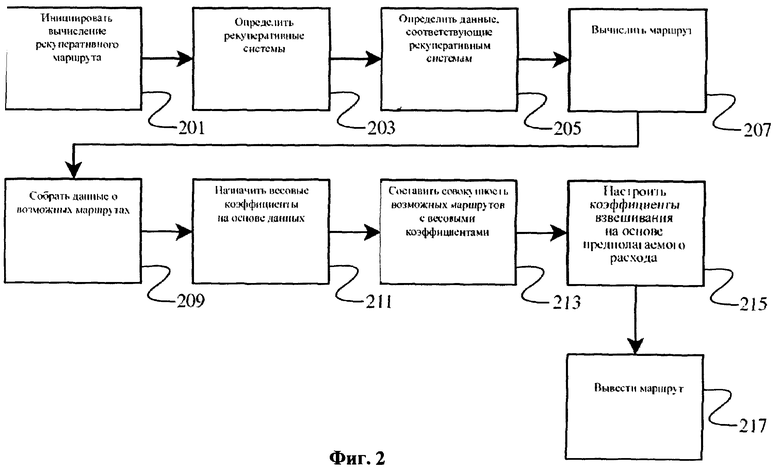
В первом показательном осуществлении, представленном на ФИГ. 2, навигационная система определяет маршрут на основании рекуперации энергии в транспортном средстве, оборудованном одной или несколькими системами рекуперации. Например, транспортным средством может быть гибридный автомобиль с рекуперативным торможением. В этом случае система может вычислять маршрут, который может требовать большего торможения, чем обычно (например, помимо прочего, ход под гору). Также рассматриваются другие рекуперативные системы, которые могут быть включены в вычисления в тех случаях, когда они могут включаться определенным типом движения. Если противоположные цели приводят к вычислениям различных маршрутов, может быть выбран преобладающий маршрут, основанный на возврате большей части энергии. Как вариант, может быть представлен самый быстрый маршрут, который сохраняет/генерирует по меньшей мере заданное количество энергии. Пример такого типа системы показан на ФИГ. 3.
На ФИГ. 2 система вычисления (в последующем называется GPS, но также может включать, помимо прочего, другую бортовую навигационную систему, сервер или другое устройство, способное вычислять направления) получает команды обеспечить как можно более рекуперативный маршрут для гибридного автомобиля 201. В этом показательном осуществлении система имеет доступ к специальной информации либо о конкретном автомобиле, либо о модели автомобиля. В еще одном показательном осуществлении (не показано) система может делать предположения о рекуперативных системах на основании обычных систем, или иметь один или несколько входов, доступных для водителя для ввода типа автомобиля, его модели и/или рекуперативной системы.
В этом осуществлении изобретения, поскольку GPS имеет доступ к специальной информации об автомобиле, GPS обращается к информации для определения существующих рекуперативных систем 203. GPS также определяет, какие типы данных соответствуют каждой рекуперативной системе (эта информация может быть предоставлена в противоположность определяемой) 205.
Затем GPS продолжает вычисление маршрута 207. Возможные маршруты вычисляются между начальным и конечным пунктами. Показательный пример этого представлен, однако способы, рассмотренные здесь, могут применяться в любом целесообразном и соответствующем алгоритме вычисления маршрута, с необходимыми модификациями в определении результата.
В этом осуществлении изобретения собираются 209 маршрутные данные для возможных маршрутов. Маршрутные данные могут включать, например, данные о возвышениях, возможных скоростях на дорогах, светофорах и др. Значения также связываются с маршрутными данными 211 с целью определения соответствующего маршрута. Агрегированное значение вычисляется 213, в этом примере, где самое высокое агрегированное значение соответствует самому рекуперативному маршруту. 215 также может выполнять вычитания на основании используемой энергии так, что если более долгий маршрут производит больше рекуперации, основанной, например, на дополнительном торможении, топливо, используемое для перемещения на это расстояние, может быть неэффективным для общего коэффициента усиления по мощности. Как правило, в данном примере, целью алгоритма является обеспечение маршрута с максимальным энергосбережением (в терминах расхода и коэффициента усиления).
Затем конечные результаты вычисления выводятся как маршрут, на котором, вероятнее всего, расходуется минимальный объем топлива в совокупности 217. Маршрут может отличаться от маршрута, на котором просто расходуется минимум топлива, так как маршрут, на котором расходуется немного больше топлива, может использовать минимум топлива в совокупности за счет рекуперации на этом маршруте.
На ФИГ. 3 показан вариант осуществления системы с экономией по меньшей мере заданного количества энергии. Например, в гибридном автомобиле результат вычисления пробега по одному маршруту может составить 24 миль/гал. По другому маршруту он может составить 28 миль/гал, но маршрут окажется более долгим. По третьему маршруту эффективность может быть равной 32 миль/гал, но маршрут будет еще более долгим и общий расход топлива на него будет большим (в настоящем тексте слово «топливо» также имеет значение энергии, например, от аккумулятора).
В одном иллюстрированном осуществлении маршрут, оптимальный по расходу топлива, выбирается в GPS 301. В этом случае GPS аналогично имеет доступ к данным о конкретном транспортном средстве, поэтому она может предсказать расход топлива. Доступ к данным по экономии топлива и способности к рекуперации (при наличии) данного транспортного средства осуществляется в 303. Используя эту информацию вместе с имеющимися маршрутными данными, система вычисляет самый быстрый маршрут 306 и маршрут, оптимальный по расходу топлива, 307. В этом случае система сравнивает маршрут, оптимальный по расходу топлива, с самым быстрым маршрутом 309. Если маршрут, оптимальный по расходу топлива, не является самым быстрым маршрутом 311, пользователю предлагается выбрать маршрут 313.
Если маршрут, оптимальный по расходу топлива, является кратчайшим по времени маршрутом, пользователю предлагается маршрут 315. Если пользователю предложено выбрать маршрут 321 и пользователь выбирает его, ему также предлагается маршрут 315.
Если пользователь не выбирает этот маршрут, ему предлагается ввести целевой расход топлива 317. Например, самый быстрый маршрут может израсходовать предположительно 5 галлонов топлива (и/или некое количество энергии аккумулятора), а оптимальный маршрут может израсходовать предположительно 3,5 галлона топлива (и/или некое количество энергии аккумулятора). У пользователя может быть время на экономию, поэтому он дает команду на кратчайший по времени маршрут, по которому расходуется не более 4,25 галлона (предположительно, так как могут возникнуть неожиданные ситуации).
По введенному целевому расходу топлива система может вычислить самый быстрый маршрут, используя этот целевой расход 319, и предложить его как вариант 321. Если он приемлем по времени, пользователь может выбрать маршрут 313 и получить предложение маршрута 315. Если же он неприемлем, может быть выбран новый маршрут с более низкой эффективностью 317.
В альтернативном осуществлении пользователь может ввести максимальное время движения и получить маршрут, который не превышает этого времени (предположительно) и оптимизирует расход топлива за это время.
В другом показательном осуществлении определяется экономящий топливо маршрут.Он аналогичен маршруту на ФИГ. 2, но в данном примере рассматривается бензиновое транспортное средство, хотя изобретение им не ограничено. Таким образом, в этом конкретном показательном осуществлении учитываются (не ограничивающим образом) факторы, которые водитель может рассматривать при экономии бензина, и факторы, которые могут отличаться (или не отличаться) от рассматриваемых при расчете эффективности бензино-электрических или чисто электрических транспортных средств.
Хотя бензиновое транспортное средство и возможные связанные с ним факторы показаны на примере, предполагается, что какие-либо факторы, существенные для транспортного средства или типа энергии, могут применяться для вычисления экономного маршрута с помощью данного изобретения.
В другом показательном осуществлении пользователь вводит желаемую эффективность по расходу топлива для бензинового транспортного средства. Она может быть выражена общим расходом топлива или пробегом на галлон. Как правило, предполагается, что самый желаемый маршрут использует минимум (насколько это возможно) топлива, поэтому если пользователь вводит, например, целевое значение 22 мили/гал, и существует маршрут, который дает 21 милю/гал, то пользователю может быть указано, что имеется маршрут, более эффективный по общему расходу, даже если он не равен целевому значению пробега (миль/гал).
В еще одном показательном осуществлении (ФИГ. 4) вычисляется маршрут с постоянным (насколько возможно) движением. В этом случае водителю предлагается маршрут, наиболее вероятно поддерживающий движение транспортного средства.
Здесь пользователь выбирает команду поддерживать движение транспортного средства 401. Как указано выше, некоторым больше нравится опыт вождения, когда транспортное средство просто движется. Хотя определенный маршрут может быть более долгим, он просто более приятен, так как нет постоянных остановов и троганий, как на более быстром маршруте.
Затем бортовая система загружает или получает доступ к маршрутным данным карт между местоположением транспортного средства и пунктом назначения 403. По такой информации, как дорожное движение в реальном времени и прогнозируемое, светофоры и/или знаки останова, бортовая система вычисляет маршрут, содержащий, вероятно, минимум остановов 405. Затем этот маршрут предлагается пользователю 407.
По сути вычисления могут быть предсказывающими. Например, если текущее время 18:00, а определенный участок маршрута проходится за 25 минут, GPS может учитывать дорожные обстановки в 18:25 в прошлом, предполагаемое время прибытия. Светофоры, вероятно, не перемещаются, хотя системные данные могут включать информацию о том, когда светофоры работают и когда они мигают желтым, например, позволяя проходить дорожному потоку. Также могут учитываться шаблоны дорожного движения в реальном времени, хотя они могут иметь меньшее значение в начале вычисления маршрута, далее по маршруту они имеются (т.е. есть больше времени для их изменения до прибытия пользователя в данную точку).
Прогнозирование по алгоритму может еще больше усложниться. Например, в субботу в определенной точке дорожное движение, как правило, свободное как в 18:00, так и в 18:25. Однако в этом примере данные дорожного движения в реальном времени могут показывать загруженное движение на этом участке. Система может полностью или частично использовать определения в реальном времени для «прогноза» того, что дорожное движение будет все еще загруженным в 18:25, несмотря на показания статистических данных. По сочетанию данных в реальном времени и статистических данных система может попытаться предсказать оптимальный маршрут.Она может даже определить, например, по сочетанию интернет-данных, данных в реальном времени и данных карт, что «пробка» на маршруте случается в определенное время, включая вероятность загруженного дорожного движения. Например, если водитель ехал на стадион, система может отметить это и также определить, что концерт начинается в 19:00, добавляя коэффициент к вероятности повышения интенсивности дорожного движения. Чем «умнее» алгоритм прогнозирования, тем точнее может быть возможный прогноз.
В другом показательном случае бортовая вычислительная система может иметь доступ к маршрутным данным о погоде. Поэтому система может определить, например, ухудшат ли погодные условия работу солнечных энергосистем транспортного средства, скорость вождения и т.д. Или бортовая система предложит водителю обойти районы с неблагоприятными метеоусловиями.
Если бортовая вычислительная система имела доступ, например, к данным о возвышениях, и если транспортное средство было оборудовано, например по меньшей мере одной солнечной энергосистемой, ориентацию которой вычислительная система знала, система может даже попытаться направить транспортное средство по маршрутам с изменяющимися возвышениями (или плоским маршрутам, в зависимости от времени суток), которые, скорее всего, поддержат солнечную энергосистему направленной к солнцу.
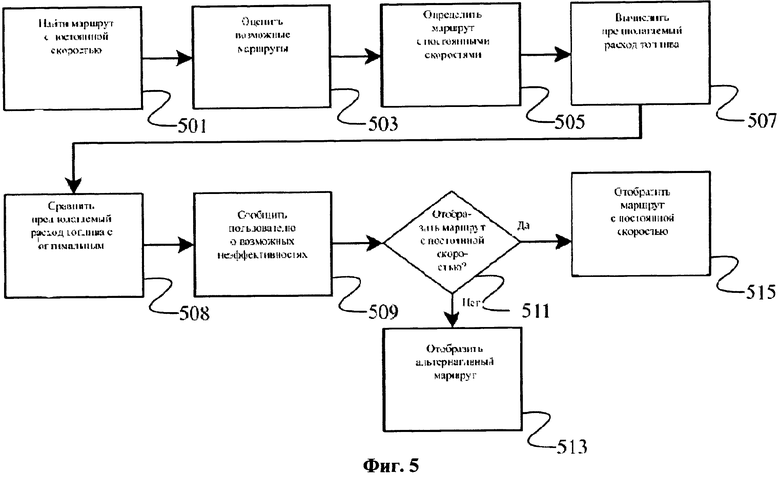
В еще одном показательном осуществлении (ФИГ. 5) вычисляется маршрут с постоянной скоростью. Этот маршрут может заинтересовать, например, хайпермайлера. Этот маршрут пытается обеспечить как можно меньше точек ускорения и также может использовать данные о возвышениях для обеспечения маршрута относительно под гору.
Водитель может захотеть использовать свои способы экономии топлива, которые транспортное средство сможет или не сможет вычислить. Например, одним из способов хайпермайлеров является езда на малой дистанции от движущегося впереди транспортного средства для уменьшения лобового сопротивления (большей экономии топлива). Поскольку маловероятно, что GPS укажет водителю на транспортное средство, позади которого следует двигаться, водитель может выбрать маршрут с более вероятным поддержанием постоянной скорости и тогда водитель может использовать другие способы. Конечно, если бы такие данные существовали, они были бы использованы в вычислении.
В этом показательном осуществлении пользователь дает команду GPS определить маршрут с постоянной скоростью 501. Затем GPS вычисляет возможные маршруты 503, при этом GPS определяет маршрут с минимальным числом изменений скорости 505. Конечно, как и в других реализациях, предполагаемый расход топлива для этого маршрута 507 также может вычисляться и сравниваться с другими маршрутами 508, и водитель может получить сообщение о возможных неэффективностях 509. Если водитель все еще желает представленный маршрут, 511, маршрут будет представлен 515. Могут быть случаи, когда водитель знает, что дополнительные несколько милей на галлон могут быть восполнены транспортным средством за счет внедренных способов, поэтому водитель может быть все еще заинтересован в маршруте, который GPS прогнозирует как менее эффективный по расходу топлива, чем альтернативный маршрут.
В противном случае может отображаться маршрут, прогнозируемый как оптимальный по расходу топлива или времени 513 (см. этот пример).
В альтернативном осуществлении водитель может ввести несколько переменных для учета в GPS при вычислении «эффективного» маршрута. Это может позволить водителю внести дополнительные условия, по которым он определяет самый эффективный маршрут.
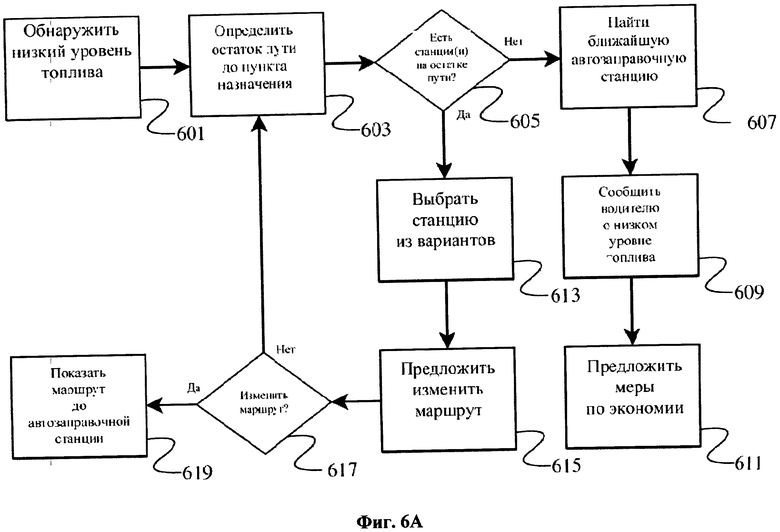
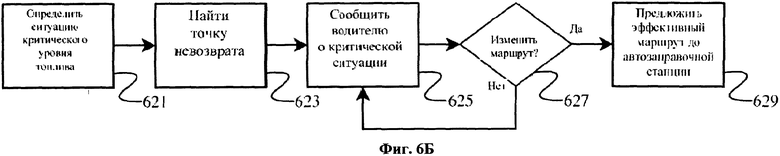
В следующих показательных примерах осуществлений (ФИГ. 6А и 6Б) показаны системы предупреждения о низком уровне топлива. В этих показательных системах измеряется уровень топлива. В примере осуществления (ФИГ. 6А) на основании остатка топлива система определяет самый быстрый маршрут до ближайшей автозаправочной станции в пределах намеченного пути. На ФИГ. 6Б система динамически вычисляет, до скольких автозаправочных станций можно доехать с остатком топлива, и если определенные условия выполняются, предупреждает водителя о приближающейся точке невозврата (например, когда до автозаправочной станции, вероятно, больше не доехать). Система даже может быть настолько развитой, что прогнозирует, на основании чего предупреждать водителя о том, что если приближающейся поворот не сделать, то, скорее всего, точки заправки будут недоступны. Это может позволить водителю повернуть перед проездом точки невозврата в противоположность тому, что система предупреждает, что точка пройдена, и затем извещает водителя о том, что может быть поздно.
На ФИГ. 6А вычисление дозаправки включается определением низкого уровня топлива 601 (это событие также может соответствовать запросу пользователя об останове для дозаправки). Когда определен низкий уровень топлива, по остатку топлива GPS определяет, насколько далеко транспортное средство может переместиться 603. Затем система обращается к данным карт для определения, есть ли одна или несколько автозаправочных станций в пределах предполагаемого оставшегося пути 605. Если их нет, система может найти ближайшую станцию и сообщить водителю, можно ли доехать до нее 607, и другую информацию. Если станция вне пределов 609, водитель может предпринять (или система предложит) шаги по экономии топлива, например, выключить кондиционер и/или другие системы, в которых нет необходимости 611.
Если имеются несколько станций, система может дать распоряжение 613 на основании, помимо прочего, ближайшей станции, ближайшей станции по маршруту и т.д. Затем система предлагает изменить маршрут, включив в него станцию 615. Если водитель не принимает изменение маршрута 617, система может продолжить вычисление маршрутов до станций по остатку топлива и предлагать варианты водителю. Или может отображаться маршрут до ближайшей (самой подходящей) станции 619.
На ФИГ. 6Б система достигла критической точки. Она вычислила, что только одна автозаправочная станция остается 621 в пределах транспортного средства. Дополнительно или альтернативно, система предполагает, что при прохождении точки по текущим направлениям транспортное средство выйдет за пределы станций 623.
Пользователю сообщается 625 о критической ситуации. Система может автоматически пересчитывать маршрут 627 или повторно предупреждать водителя до тех пор, пока не будет выбран новый маршрут 629.
Применяя все способы, рассмотренные здесь, прогнозируемое моделирование может использоваться для улучшения опыта вождения. Системы определения маршрутов и более сложные данные также эффективно применяются для предоставления водителю вариантов, которые ранее были недоступны. Это может дать экологически более чистое и/или приятное вождение.
Хотя изобретение описано со ссылками на показательные варианты осуществления, эти ссылки предназначены только для примера и предполагается, что они не ограничивают область применения изобретения описанными осуществлениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНАПРАВЛЕНИЕ К ЗАПРАВОЧНОЙ СТАНЦИИ | 2015 |
|
RU2705663C1 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2577548C2 |
| УСТРОЙСТВО ДЛЯ ПОМОЩИ ВОДИТЕЛЮ | 2011 |
|
RU2531564C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2563104C2 |
| УЛУЧШЕННОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ | 2007 |
|
RU2459262C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С АДАПТИВНЫМИ ИНСТРУКЦИЯМИ ПО НАВИГАЦИИ | 2006 |
|
RU2413927C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПЛАНИРОВАНИЯ ЗАВИСЯЩЕГО ОТ ВРЕМЕНИ МАРШРУТА | 2006 |
|
RU2407060C2 |
| СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ СОГЛАСОВАНИЯ ЗАПРАВКИ (ВАРИАНТЫ) | 2015 |
|
RU2698946C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |

Изобретение относится к системе определения экономного маршрута транспортного средства. Техническим результатом является определение кратчайшего маршрута, вывод маршрута оптимального по расходу топлива. Заявлен способ определения экономного маршрута транспортного средства, в котором осуществляют: сбор данных в бортовой навигационной системе (VNS) для нескольких маршрутов между двумя пунктами; взвешивание в системе VNS двух или более возможных маршрутов на основании по меньшей мере собранных данных; настройку веса в системе VNS для каждого взвешенного маршрута на основании прогнозируемого расхода топлива; определение в системе VNS маршрута, оптимального по расходу топлива, на основании настроенного веса; корреляцию одного или нескольких элементов собранных данных с одной или несколькими энергогенерирующими системами транспортного средства, причем взвешивание основано, по меньшей мере частично, на индикации, основанной на собранных данных, о том, что на отрезке или на всем возможном маршруте возникают благоприятные условия для генерирования энергии путем ее рекуперирования во время движения транспортного средства; и вывод по меньшей мере одного вычисленного оптимального маршрута, эффективного по расходу топлива. 5 з.п. ф-лы, 7 ил.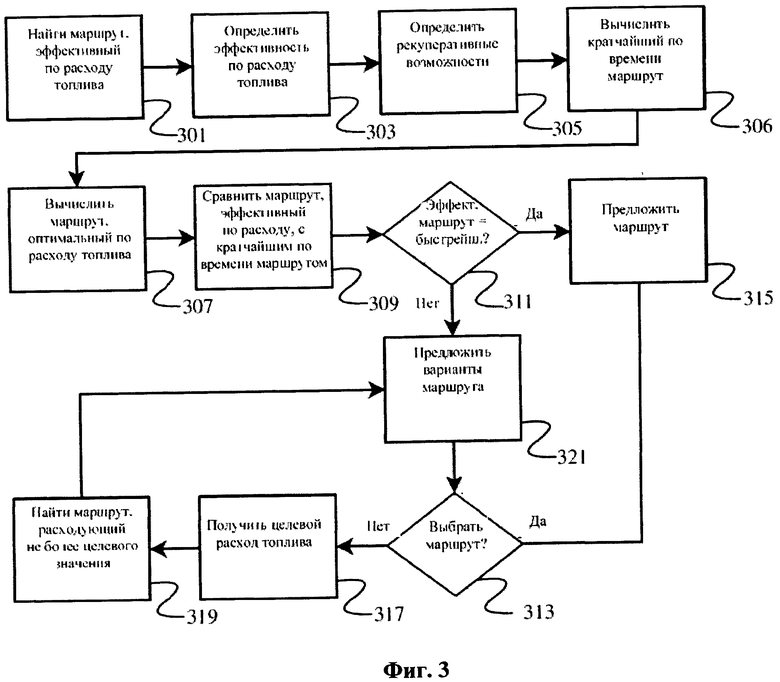
1. Способ определения экономного маршрута транспортного средства, в котором осуществляют:
сбор данных в бортовой навигационной системе (VNS) для нескольких маршрутов между двумя пунктами;
взвешивание в системе VNS двух или более возможных маршрутов на основании по меньшей мере собранных данных;
настройку веса в системе VNS для каждого взвешенного маршрута на основании прогнозируемого расхода топлива;
определение в системе VNS маршрута, оптимального по расходу топлива, на основании настроенного веса;
корреляцию одного или нескольких элементов собранных данных с одной или несколькими энергогенерирующими системами транспортного средства, причем взвешивание основано, по меньшей мере частично, на индикации, основанной на собранных данных, о том, что на отрезке или на всем возможном маршруте возникают благоприятные условия для генерирования энергии путем ее рекуперирования во время движения транспортного средства; и
вывод по меньшей мере одного вычисленного оптимального маршрута, эффективного по расходу топлива.
2. Способ по п.1, в котором энергогенерирующие системы представляют собой по меньшей мере рекуперативную тормозную систему или преобразователь солнечной энергии.
3. Способ по п.2, в котором по меньшей мере один элемент данных включает данные о возвышениях, которые коррелируют с рекуперативной тормозной системой.
4. Способ по п.2, в котором по меньшей мере один элемент данных включает данные о знаках остановки, которые коррелируют с рекуперативной тормозной системой.
5. Способ по п.2, в котором по меньшей мере один элемент данных включает данные о светофорах, которые коррелируют с рекуперативной тормозной системой.
6. Способ по п.2, в котором по меньшей мере один элемент данных включает данные о дорожном движении, которые коррелируют с рекуперативной тормозной системой.
| US 20100010732 A1, 14.01.2010 | |||
| EP 1965565 A2, 03.09.2008 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО, ОТОБРАЖАЮЩЕЕ ИНФОРМАЦИЮ О ДВИЖЕНИИ | 2005 |
|
RU2354935C2 |
| US 20090254266 A1, 08.10.2009 | |||
| "GARMIN ECOROUTE HD TRANSFORMS YOUR NUVI INTO A REAL-TIME ONBOARD DIAGNOSTIC COMPUTER", 05.10.2010, http:// | |||

