Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству вычисления маршрута движения, которое вычисляет маршрут движения.
Уровень техники
[0002] На сегодняшний день известны устройства навигации по маршруту, которые выполнены с возможностью осуществлять навигацию по маршруту в обозначенный пункт назначения, при одновременном моделировании изолированного перекрестка, на котором возникает риск для изоляции транспортного средства без плавного проезда через перекресток. Например, патентный документ 1 раскрывает устройство навигации по маршруту, в котором матрица значений риска подготовлена для каждого факторного признака, такого как железнодорожный переезд и часть с сужающейся полосой движения дороги, который существует в направлении выезда с перекрестка. Матрица значений риска задает количественное значение риска, которое указывает вероятность того, что перекресток может представлять собой изолированный перекресток. На предмет результата поиска маршрута из начальной точки в пункт назначения, устройство навигации по маршруту обращается к матрице значений риска для каждого перекрестка на этом маршруте, с тем чтобы получать количественное значение риска, и извлекает, в качестве изолированного перекрестка, перекресток, в котором количественное значение риска превышает предварительно определенное пороговое значение. Затем устройство навигации на основе инструкций по маршруту выполняет поиск и осуществляет навигацию по маршруту, который обеспечивает возможность избегания изолированного перекрестка.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2012-247315A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Транспортные средства с поддержкой помощи при вождении или автономные транспортные средства выполняют действие транспортного средства и движутся при распознавании светофоров и т.п. В таких транспортных средствах, выполняющих принятие решения по действию, информация, требуемая для принятия решения по действию, должна собираться для надлежащего приведения в движение.
[0005] Тем не менее, в вышеуказанной технологии патентного документа 1, индекс степени риска основан на том, возникает или нет риск для изоляции транспортного средства на перекрестке, и не воспринимается то, может или нет транспортное средство распознавать перекресток. Таким образом, даже когда степень риска является низкой на перекрестке, например, транспортное средство не может распознавать признак, требуемый для принятия решения по действию, если признак не может обнаруживаться посредством датчика, и транспортное средство не может надлежащим образом двигаться.
[0006] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство вычисления маршрута движения, которое, для транспортного средства, движущегося в соответствии с принятием решения по действию, может вычислять маршрут движения, на котором легко воспринимаются признаки, требуемые для принятия решения по действию.
Средство решения задач
[0007] Настоящее изобретение разрешает вышеуказанную проблему посредством измерения требуемого расстояния распознавания, которое требуется для рассматриваемого транспортного средства, чтобы распознавать признак при принятии решения по действию рассматриваемого транспортного средства, определения затруднения при распознавании признака на основе диапазона обнаружения модуля обнаружения признаков и требуемого расстояния распознавания и вычисления маршрута движения при одновременном избегании местоположения, в котором определяется то, что распознавание признака является затруднительным.
Преимущества изобретения
[0008] Согласно настоящему изобретению, затруднение при распознавании признака, требуемого для принятия решения по действию, воспринимается на маршруте движения для прибытия транспортного средства в пункт назначения, и в силу этого можно вычислять маршрут движения, который обеспечивает возможность транспортному средству легко распознавать признак.
Краткое описание чертежей
[0009] Фиг. 1 является блок-схемой устройства вычисления маршрута движения согласно варианту осуществления настоящего изобретения.
Фиг. 2 является видом, иллюстрирующим пример схемы дороги.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций управления посредством устройства вычисления маршрута движения.
Фиг. 4A является видом, иллюстрирующим пример схемы дороги.
Фиг. 4B является видом, иллюстрирующим пример схемы дороги.
Фиг. 5 является блок-схемой устройства вычисления маршрута движения согласно другому варианту осуществления настоящего изобретения.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций управления посредством устройства вычисления маршрута движения.
Фиг. 7A является видом, иллюстрирующим пример схемы дороги.
Фиг. 7B является видом, иллюстрирующим пример схемы дороги.
Режим(ы) осуществления изобретения
[0010] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
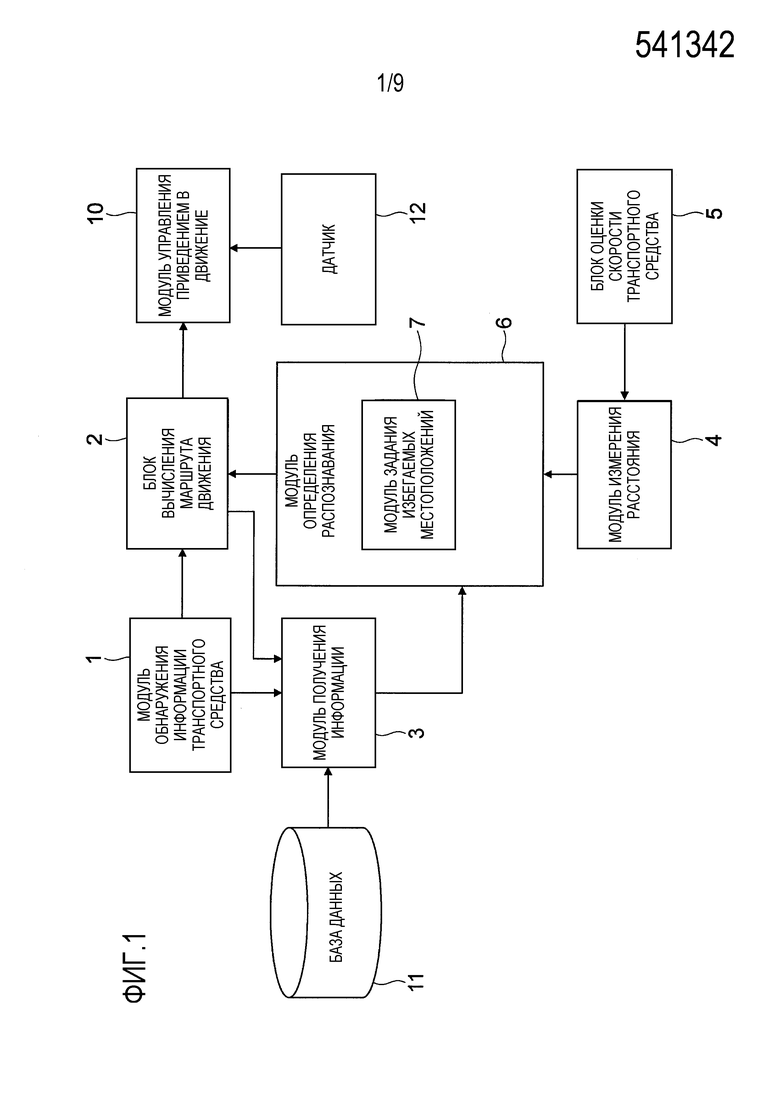
[0011] Фиг. 1 является блок-схемой устройства вычисления маршрута движения согласно варианту осуществления настоящего изобретения. Устройство вычисления маршрута движения согласно настоящему варианту осуществления представляет собой устройство, которое оснащено в транспортном средстве с возможностью вычислять маршрут движения, когда транспортное средство выполняет автономное приведение в движение.
[0012] Устройство вычисления маршрута движения содержит постоянное запоминающее устройство (ROM), которое сохраняет различные программы, центральный процессор (CPU) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM, и оперативное запоминающее устройство (RAM), которое выступает в качестве доступного устройства хранения данных.
[0013] Устройство вычисления маршрута движения содержит модуль 10 управления приведением в движение, базу 11 данных и датчик 12. База 11 данных сохраняет картографические данные, информацию относительно признаков, информацию относительно дорог и т.д. Картографические данные включают в себя данные ребер и данные узлов. Информация относительно признаков включает в себя, например, информацию относительно светофоров, информацию относительно железнодорожных переездов и информацию относительно дорожных знаков. Информация относительно дорог включает в себя информацию относительно перекрестков, информацию относительно участков слияния дорог и информацию форм дорог для участков разветвления дорог. Датчик 12 представляет собой датчик для обнаружения ситуаций рядом с рассматриваемым транспортным средством. Примеры датчика 12 включают в себя камеры, устройства миллиметрового диапазона и радары.
[0014] Модуль 10 управления приведением в движение управляет автономным приведением в движение рассматриваемого транспортного средства на основе значений обнаружения датчика 12. Модуль 10 управления приведением в движение использует датчик 12, чтобы распознавать признаки, требуемые для принятия решения по действию рассматриваемого транспортного средства. Принятие решения по действию в ходе автономного приведения в движение выполняется посредством транспортного средства, распознающего признаки, такие как светофоры, дорожные знаки и железнодорожные переезды на маршруте движения. Модуль 10 управления приведением в движение указывает целевую точку при выполнении действия рассматриваемого транспортного средства, на основе признаков. Например, когда транспортное средство поворачивает направо в результате принятия решения по действию, целевая точка представляет собой местоположение перекрестка, на котором транспортное средство поворачивает направо. Затем модуль 10 управления приведением в движение выполняет выбранное действие в целевой точке. Это обеспечивает возможность рассматриваемому транспортному средству автономно двигаться.
[0015] В качестве примера, описывается автономное приведение в движение, при котором рассматриваемое транспортное средство должно двигаться через перекресток, расположенный впереди рассматриваемого транспортного средства. Допустим, что признак представляет собой светофор, предоставленный на перекрестке, и действие рассматриваемого транспортного средства в соответствии с индикатором светофора представляет собой поведение транспортного средства. Когда сигнал светофора является красным или желтым, действие рассматриваемого транспортного средства представляет собой операцию для того, чтобы останавливать транспортное средство на стоп-линии перекрестка. С другой стороны, когда сигнал светофора является зеленым, действие рассматриваемого транспортного средства представляет собой операцию для того, чтобы проезжать через перекресток на заданной скорости. Таким образом, светофор и перекресток представляют собой признаки, которые вызывают изменение поведения рассматриваемого транспортного средства. Модуль 10 управления приведением в движение задает целевую точку для принятия решения по действию в качестве перекрестка. До того, как транспортное средство въезжает на перекресток, модуль 10 управления приведением в движение распознает светофор из местоположения, отделенного от перекрестка на предварительно определенное расстояние. Светофор обнаруживается посредством датчика 12. Затем по мере того, как транспортное средство приближается к перекрестку, модуль 10 управления приведением в движение распознает светофор и принимает решение по действию в соответствии с цветом, указываемым посредством светофора. Затем модуль 10 управления приведением в движение заставляет транспортное средство двигаться в соответствии с выбранным действием. Это обеспечивает возможность автономного приведения в движение транспортного средства. Модуль 10 управления приведением в движение выполняет управление автономным приведением в движение, как указано выше, повторяющимся способом в ходе движения по маршруту движения. Следует отметить, что вышеуказанное управление автономным приведением в движение является просто примером, и также может использоваться другой способ управления.
[0016] Устройство вычисления маршрута движения имеет модуль 1 обнаружения информации транспортного средства, модуль 2 вычисления маршрута движения, модуль 3 получения информации, модуль 4 измерения расстояния, модуль 5 оценки скорости транспортного средства и модуль 6 определения распознавания в качестве функциональных блоков для вычисления маршрута движения, подходящего для автономного приведения в движение при выполнении автономного приведения в движение транспортного средства, как указано выше. Модуль 6 определения распознавания имеет модуль 7 задания избегаемых местоположений.
[0017] Модуль 1 обнаружения информации транспортного средства обнаруживает информацию транспортного средства для рассматриваемого транспортного средства. Информация транспортного средства включает в себя позиционную информацию рассматриваемого транспортного средства и другие элементы. Модуль 1 обнаружения информации транспортного средства имеет функцию, которая должна использоваться в GPS, и т.п.
[0018] Модуль 2 вычисления маршрута движения получает информацию транспортного средства из модуля 1 обнаружения информации транспортного средства и вычисляет маршрут движения из текущей позиции транспортного средства в пункт назначения со ссылкой на картографические данные. Пункт назначения вводится, например, пользователем. Картографические данные сохраняются в базе 11 данных. Это обеспечивает возможность модулю 2 вычисления маршрута движения вычислять маршрут движения на основе информации транспортного средства.
[0019] Когда избегаемое местоположение задается посредством модуля 7 задания избегаемых местоположений, модуль 2 вычисления маршрута движения вычисляет маршрут движения, с тем чтобы избегать избегаемого местоположения.
[0020] Модуль 3 получения информации получает маршрут движения из модуля 2 вычисления маршрута движения. Модуль 3 получения информации также получает информацию относительно признаков относительно маршрута движения. Признаки представляют собой признаки, которые рассматриваемое транспортное средство должно распознавать при принятии решения по действию. Признаки также представляют собой признаки, которые представляют правила дорожного движения, которых должен придерживаться водитель во время вождения транспортного средства. Примеры признаков включают в себя светофоры, дорожные знаки и железнодорожные переезды на маршруте движения.
[0021] Модуль 3 получения информации дополнительно получает информацию относительно дорог из модуля 2 вычисления маршрута движения. Информация относительно дорог включает в себя не только информацию относительно дорог на маршруте движения, но также и информацию относительно дорог, соединенных с дорогами на маршруте движения. Например, когда светофор существует на маршруте движения, информация относительно дорог включает в себя не только информацию дороги для дороги, по которой планируется движение транспортного средства, но также и информацию относительно перекрестка, на котором предусмотрен светофор, и информацию дороги для дороги, соединенной с перекрестком.
[0022] Модуль 4 измерения расстояния измеряет требуемое расстояние распознавания. Требуемое расстояние распознавания представляет собой расстояние, требуемое для рассматриваемого транспортного средства, чтобы распознавать признак при принятии решения по действию рассматриваемого транспортного средства. Это расстояние представляет собой расстояние от признака, который должен распознаваться, до рассматриваемого транспортного средства.
[0023] Модуль 5 оценки скорости транспортного средства оценивает скорость транспортного средства для рассматриваемого транспортного средства при движении к признаку по маршруту движения.
[0024] Модуль 6 определения распознавания определяет затруднение при распознавании признака на основе диапазона обнаружения датчика 12 и требуемого расстояния распознавания, измеряемого посредством модуля 4 измерения расстояния. Признаки, для которых определяется затруднение, представляют собой признаки, которые должно распознавать рассматриваемое транспортное средство, когда модуль 10 управления приведением в движение выполняет автономное приведение в движение.
[0025] Модуль 7 задания избегаемых местоположений задает местоположение, в котором определяется то, что распознавание признака является затруднительным посредством модуля 6 определения распознавания, в качестве избегаемого местоположения.
[0026] Когда избегаемое местоположение задается во время вычисления маршрута движения, модуль 2 вычисления маршрута движения вычисляет маршрут движения в пункт назначения при одновременном избегании избегаемого местоположения. Модуль 10 управления приведением в движение управляет приведением в движение транспортного средства на основе маршрута движения, который вычисляется с возможностью избегать избегаемого местоположения.
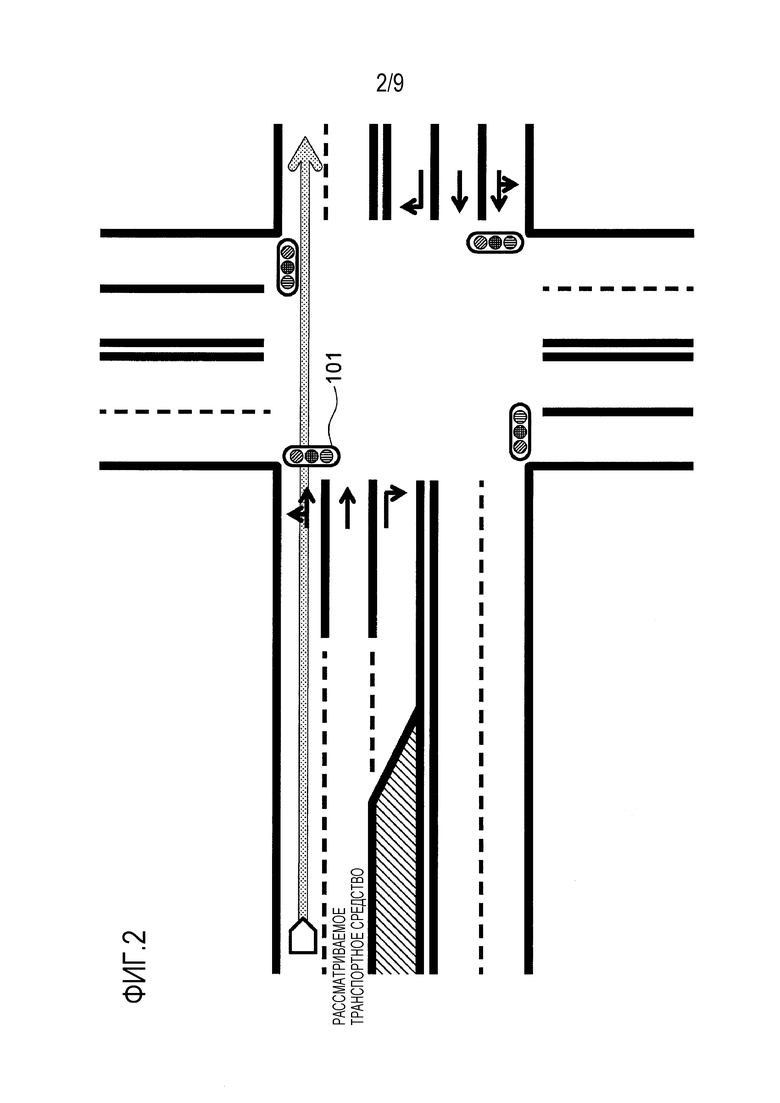
[0027] Здесь, затруднение при распознавании признака описывается со ссылкой на фиг. 2. Фиг. 2 является видом, иллюстрирующим схему перекрестка.
[0028] Например, как проиллюстрировано на фиг. 2, когда рассматриваемое транспортное средство движется через перекресток посредством автономного приведения в движение, рассматриваемое транспортное средство должно принимать решение по действию в соответствии с индикатором светофора 101. Когда индикатор светофора 101 является красным, рассматриваемое транспортное средство должно останавливаться перед стоп-линией перекрестка. Для выполнения посредством рассматриваемого транспортного средства такого принятия решения по действию, датчик 12 должен распознавать светофор 101 с использованием датчика 12.
[0029] Расстояние торможения транспортного средства определяется посредством скорости транспортного средства. Например, когда транспортное средство движется на высокой скорости, расстояние торможения является большим. Чтобы, в таком случае, транспортное средство принудительно останавливалось на стоп-линии вследствие красного индикатора светофора 101, транспортное средство должно распознавать светофор 101 в позиции, отделенной от позиции светофора 101, по меньшей мере, на расстояние торможения.
[0030] Диапазон обнаружения датчика 12 предварительно определяется посредством рабочих характеристик датчика 12 и т.д. Если транспортное средство расположено в позиции, отделенной от позиции светофора 101, по меньшей мере, на расстояние торможения, и светофор 101 существует за пределами диапазона обнаружения датчика 12, распознавание светофора 101 является затруднительным. Таким образом, когда рассматриваемое транспортное средство движется по маршруту движения, на котором распознавание признака является затруднительным, модуль 10 управления приведением в движение не может распознавать требуемый признак автономного приведения в движение с использованием датчика 12, и может быть возможным то, что автономное приведение в движение не может выполняться обычным способом.
[0031] Устройство вычисления маршрута движения согласно настоящему варианту осуществления в силу этого определяет то, являются или нет признаки распознаваемыми на маршруте движения, и задает местоположение, в котором распознавание признака является затруднительным, в качестве избегаемого местоположения на маршруте движения. Затем устройство вычисления маршрута движения вычисляет маршрут движения, с тем чтобы избегать избегаемого местоположения. Маршрут движения в силу этого может быть подходящим для автономного приведения в движение.
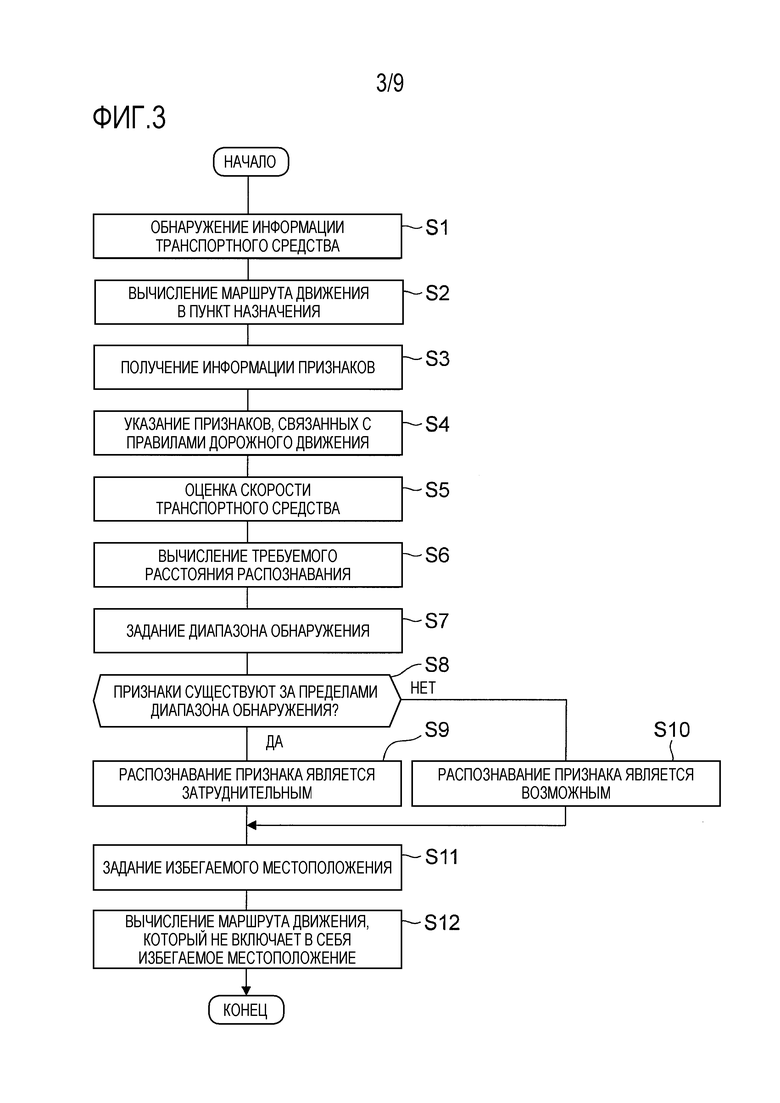
[0032] Далее описывается управление посредством устройства вычисления маршрута движения со ссылкой на конкретный пример. Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций управления посредством устройства вычисления маршрута движения. Блок-схема последовательности операций способа, проиллюстрированная на фиг. 3, представляет последовательность операций, которая выполняется до того, как осуществляется управление автономным приведением в движение, и выполняется, когда пункт назначения вводится пользователем, и т.п. Предполагается конкретный примерный случай, в котором маршрут движения включает в себя множество перекрестков, каждый из которых имеет светофоры, из текущей позиции транспортного средства в пункт назначения. В нижеприведенном описании, светофоры упоминаются в качестве признаков в описательных целях, но признаки не ограничены светофорами и также могут представлять собой, например, другие признаки, такие как знаки дорожного движения.
[0033] На этапе S1, модуль 1 обнаружения информации транспортного средства обнаруживает позицию рассматриваемого транспортного средства в качестве текущей информации транспортного средства для рассматриваемого транспортного средства. Позиция транспортного средства обнаруживается посредством комбинации глобальной системы позиционирования (GPS), гиродатчика, датчика скорости транспортного средства и т.п. Позиция транспортного средства не ограничена текущей позицией остановки транспортного средства и также может представлять собой текущую позицию движения транспортного средства.
[0034] На этапе S2, модуль 2 вычисления маршрута движения вычисляет маршрут движения в пункт назначения на основе текущей позиции транспортного средства. Маршрут движения представляет собой маршрут, по которому должно двигаться рассматриваемое транспортное средство из нее. Маршрут движения может вычисляться с использованием автомобильной навигационной системы. Вычисление маршрута движения может необязательно получать полосу движения, в которой должно двигаться транспортное средство, и достаточно определять то, должно транспортное средство ехать прямо вперед по маршруту либо ехать прямо через, поворачивать направо или поворачивать налево на перекрестке.
[0035] На этапе S3, модуль 3 получения информации получает информацию признаков из базы 11 данных. На этапе S4, модуль 6 определения распознавания указывает признак относительно правил дорожного движения на маршруте движения из информации признаков. Признак, который должен указываться, представляет собой признак, которого рассматриваемое транспортное средство должно придерживаться при движении по маршруту движения. Когда маршрут движения включает в себя множество светофоров, модуль 6 определения распознавания указывает светофор в каждой точке. Модуль 6 определения распознавания указывает светофоры на всех перекрестках на маршруте движения.
[0036] На этапе S5, модуль 5 оценки скорости транспортного средства оценивает скорость транспортного средства, на которой рассматриваемое транспортное средство движется к признаку, указываемому посредством модуля 6 определения распознавания. База 11 данных сохраняет разрешенную скорость каждой дороги в качестве картографических данных. Модуль 5 оценки скорости транспортного средства в силу этого обращается к позиции признака и дорог на маршруте движения, чтобы оценивать разрешенную скорость дороги для движения к признаку в качестве скорости транспортного средства.
[0037] Модуль 5 оценки скорости транспортного средства может необязательно оценивать разрешенную скорость в качестве скорости транспортного средства для рассматриваемого транспортного средства. Модуль 5 оценки скорости транспортного средства также может оценивать более низкую скорость транспортного средства, чем разрешенная скорость. Это обусловлено тем, что транспортное средство может необязательно двигаться на разрешенной скорости при движении через перекресток. Например, рассматриваемое транспортное средство не может поворачивать на разрешенной скорости при повороте направо на перекрестке. Помимо этого, закон о дорожном движении задает то, что когда транспортное средство поворачивает направо или налево на перекрестке, транспортное средство должно двигаться на скорости, которая обеспечивает возможность транспортному средству останавливаться в любое время. В силу этого, почти во всех случаях транспортное средство не движется на разрешенной скорости на перекрестке, когда транспортное средство планирует поворачивать. В таких случаях, модуль 5 оценки скорости транспортного средства оценивает более низкую скорость, чем разрешенная скорость, в качестве скорости транспортного средства для рассматриваемого транспортного средства, т.е. скорости при движении через перекресток.
[0038] Когда модуль 5 оценки скорости транспортного средства оценивает более низкую скорость, чем разрешенная скорость, в качестве скорости транспортного средства для рассматриваемого транспортного средства, модуль 5 оценки скорости транспортного средства может оценивать скорость транспортного средства на основе скорости транспортного средства при движении в предыдущие времена на дороге, для которой оценивается скорость транспортного средства.
[0039] На этапе S6, модуль 4 измерения расстояния измеряет требуемое расстояние распознавания на основе скорости транспортного средства, оцененной посредством модуля 5 оценки скорости транспортного средства.
[0040] Здесь описывается взаимосвязь между поведением транспортного средства и требуемым расстоянием распознавания. Условия, влияющие на поведение транспортного средства, движущегося, например, к перекрестку, могут быть серьезными, когда величина операции торможения должна быть внезапно увеличена, либо когда угол поворота руля при рулении должен быть внезапно увеличен. Например, когда транспортное средство должно ехать по прямой через перекресток, но сигнал переключается на красный цвет, условия, влияющие на поведение транспортного средства, являются серьезными.
[0041] Допустим, что когда рассматриваемое транспортное средство движется в местоположении перед перекрестком, v (км/ч) представляет скорость при движении к перекрестку, и t представляет время, требуемое для замедления рассматриваемого транспортного средства с использованием фиксированного замедления (0,15 G) от местоположения, в котором выполняется принятие решения по действию, до стоп-линии перекрестка. Местоположение, в котором выполняется принятие решения по действию, представляет собой местоположение, в котором начинается операция торможения для того, чтобы останавливаться на стоп-линии. Позиция остановки рассматриваемого транспортного средства предположительно должна быть идентичной позицией с позицией светофора для простоты описания.
[0042] Расстояние (d (м)) от местоположения, в котором выполняется принятие решения по действию, до стоп-линии перекрестка представлено посредством уравнения (1).
[0043] (выражение 1)

[0044] Помимо этого, взаимосвязь между скоростью (v) при движении к перекрестку и временем (t) представлена посредством уравнения (2).
[0045] (выражение 2)

[0046] Расстояние (d) в силу этого представлено посредством уравнения (3) из уравнений (1) и (2).
[0047] (выражение 3)

[0048] С учетом того, что разрешенная скорость составляет 60 (км/ч), например, v=60 (км/ч) подставляется в уравнение (3), чтобы получать d=94,48 (м). Поведение транспортного средства является таким, что когда транспортное средство движется на скорости транспортного средства (v=60 (км/ч)) к перекрестку, расстояние торможения составляет 94,48 (м). В случае автономного приведения в движение, чтобы рассматриваемое транспортное средство останавливалось на стоп-линии в соответствии с таким поведением транспортного средства, рассматриваемое транспортное средство должно распознавать светофор при обеспечении расстояния торможения. Таким образом, расстояние торможения, представленное посредством уравнения (3), соответствует требуемому расстоянию распознавания, и модуль 4 измерения расстояния может измерять требуемое расстояние распознавания с использованием вышеуказанного арифметического выражения.
[0049] Требуемое расстояние распознавания может изменяться в соответствии с позициями признаков на схеме (в примере по фиг. 2, позициями светофоров на перекрестке). Например, предположим автономное приведение в движение, при котором транспортное средство принудительно останавливается на стоп-линии, когда светофор предоставляется перед перекрестком на маршруте движения (см. фиг. 2). В этом случае, позиция стоп-линии и позиция светофора находятся близко друг к другу, и в силу этого когда требуемое расстояние распознавания может обеспечиваться, по меньшей мере, в качестве величины, соответствующей расстоянию торможения транспортного средства, транспортное средство может принудительно останавливаться на стоп-линии при распознавании светофора.
[0050] С другой стороны, предположим автономное приведение в движение, при котором транспортное средство принудительно останавливается на стоп-линии, когда светофор предоставляется за пределами перекрестка на маршруте движения. В этом случае, светофор предоставляется в позиции дальше стоп-линии на маршруте движения. Требуемое расстояние распознавания в силу этого представляет собой расстояние, полученное посредством суммирования расстояния между стоп-линией и светофором с расстоянием торможения транспортного средства.
[0051] На этапе S7, модуль 6 определения распознавания задает диапазон обнаружения датчика 12 для позиции рассматриваемого транспортного средства. Позиция рассматриваемого транспортного средства представляет собой позицию, отделенную от признака в качестве объекта распознавания на расстояние, соответствующее требуемому расстоянию распознавания.
[0052] Например, датчик 12 предположительно предоставляется таким образом, что в дополнение к камере, множество датчиков, таких как устройство миллиметрового диапазона, радар и лазер предоставляются в рассматриваемом транспортном средстве, и эти датчики дополняют каждый диапазон обнаружения датчиков. Здесь, диапазон обнаружения (расстояние обнаружения) датчика в качестве типичного значения (номинального значения) рабочих характеристик датчика может составлять 200 метров в случае устройства миллиметрового диапазона, сотни метров в случае радара, 100 метров в случае лазера и десятки метров в случае камеры.
[0053] Диапазон обнаружения датчика может задаваться не только посредством расстояния, но и посредством угла. Диапазон обнаружения устройства миллиметрового диапазона является относительно малым углом, но диапазон обнаружения камеры может выбираться узким или широким вследствие широкого угла линз.
[0054] Когда множество датчиков размещаются таким образом, что они охватывают идентичный диапазон, чтобы уменьшать ошибочное распознавание, максимальный диапазон обнаружения посредством этих датчиков может использоваться в качестве диапазона обнаружения датчиков, или минимальный диапазон обнаружения может использоваться в качестве диапазона обнаружения датчиков.
[0055] Нижеприведенное описание приводится при условии, что диапазон формирования изображений датчика 12 представляет собой диапазон обнаружения (например, 50 метров) датчика для простоты описания.
[0056] На этапе S8, модуль 6 определения распознавания сравнивает диапазон обнаружения датчика 12 с требуемым расстоянием распознавания, чтобы определять то, расположен или нет признак за пределами диапазона обнаружения датчика 12. Когда требуемое расстояние распознавания превышает диапазон обнаружения датчика 12, модуль 6 определения распознавания определяет то, что признак расположен за пределами диапазона обнаружения датчика 12. С другой стороны, когда требуемое расстояние распознавания не превышает диапазон обнаружения датчика 12, модуль 6 определения распознавания определяет то, что признак расположен в пределах диапазона обнаружения датчика 12.
[0057] Когда признак расположен за пределами диапазона обнаружения датчика 12, модуль 6 определения распознавания определяет, на этапе S9, то, что распознавание признака является затруднительным. С другой стороны, когда признак расположен в пределах диапазона обнаружения датчика 12, модуль 6 определения распознавания определяет, на этапе S10, то, что распознавание признака является возможным.
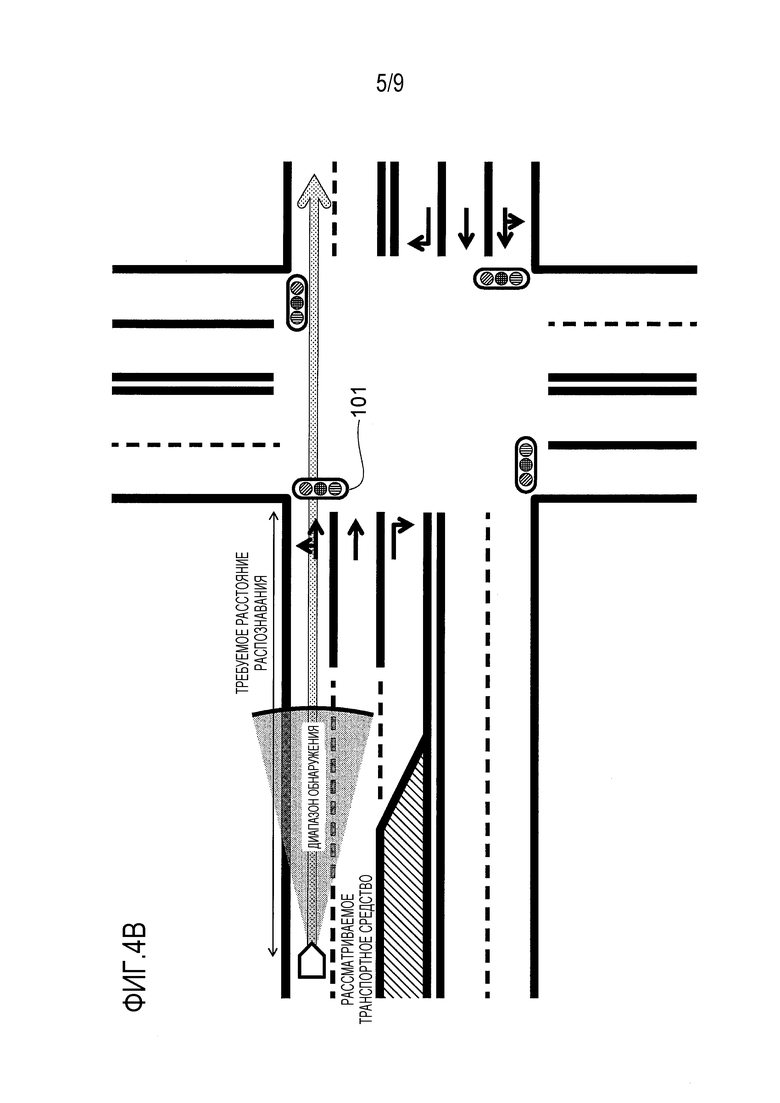
[0058] Последовательность операций управления для этапов S5-S10 описывается более подробно со ссылкой на два рисунка схем, проиллюстрированных на фиг. 4A и фиг. 4B.
[0059] Фиг. 4A и фиг. 4B являются видами, иллюстрирующими схему перекрестка. В примере по фиг. 4A, рассматриваемое транспортное средство движется на дороге до проезда через перекресток, и разрешенная скорость дороги предположительно составляет 40 км/ч. В примере по фиг. 4B, рассматриваемое транспортное средство движется на дороге до проезда через перекресток, и разрешенная скорость дороги предположительно составляет 60 км/ч.
[0060] В примере по фиг. 4A, модуль 5 оценки скорости транспортного средства оценивает скорость транспортного средства (40 км/ч) при движении к светофору 101. Модуль 4 измерения расстояния вычисляет требуемое расстояние распознавания (42 м) с использованием вышеуказанного арифметического выражения. Модуль 6 определения распознавания задает диапазон обнаружения (50 м) датчика 12 для позиции рассматриваемого транспортного средства.
[0061] Поскольку требуемое расстояние распознавания не превышает диапазон обнаружения датчика, как проиллюстрировано на фиг. 4A, светофор 101 существует в пределах диапазона обнаружения датчика 12. Модуль 6 определения распознавания определяет то, что светофор 101 представляет собой распознаваемый признак.
[0062] В примере по фиг. 4B, модуль 5 оценки скорости транспортного средства оценивает скорость транспортного средства (60 км/ч) при движении к светофору 101. Модуль 4 измерения расстояния вычисляет требуемое расстояние распознавания (приблизительно 93 м) с использованием вышеуказанного арифметического выражения. Модуль 6 определения распознавания задает диапазон обнаружения (50 м) датчика 12 для позиции рассматриваемого транспортного средства.
[0063] Поскольку требуемое расстояние распознавания превышает диапазон обнаружения датчика, как проиллюстрировано на фиг. 4B, светофор 101 существует за пределами диапазона обнаружения датчика 12. Модуль 6 определения распознавания определяет то, что светофор 101 представляет собой признак, который затруднительно распознавать.
[0064] Когда маршрут движения включает в себя множество признаков, которых должен придерживаться водитель, последовательности операций управления для этапов S5-S10 выполняются для признака, ближайшего к рассматриваемому транспортному средству, и последовательности операций управления для этапов S5-S10 затем выполняются для второго ближайшего признака к рассматриваемому транспортному средству. Таким образом, последовательность операций управления для этапов S5-S10 выполняется для каждого из всех признаков, которые существуют на маршруте движения, по которому должно двигаться рассматриваемое транспортное средство из текущей позиции.
[0065] На этапе S11, модуль 7 задания избегаемых местоположений задает местоположение, в котором определяется то, что распознавание признака является затруднительным, в качестве избегаемого местоположения. Что касается примеров по фиг. 4A и фиг. 4B, перекресток, проиллюстрированный на фиг. 4A, не задается в качестве избегаемого местоположения, а перекресток, проиллюстрированный на фиг. 4B, задается в качестве избегаемого местоположения. Более конкретно, что касается перекрестка, проиллюстрированного на фиг. 4B, когда рассматриваемое транспортное средство движется к перекрестку на оцененной скорости транспортного средства, рассматриваемому транспортному средству затруднительно распознавать светофор 101 с использованием датчика 12 для принятия решения по действию. Перекресток, проиллюстрированный на фиг. 4B, в силу этого задается в качестве избегаемого местоположения.
[0066] На этапе S12, модуль 2 вычисления маршрута движения вычисляет маршрут движения из текущей позиции транспортного средства в пункт назначения при одновременном избегании избегаемого местоположения. Способ вычисления маршрута движения может заключаться в том, чтобы использовать схему на основе теории поиска по графу, такую как алгоритм Дейкстры. Помимо этого или альтернативно, модуль 2 вычисления маршрута движения может присваивать больший весовой коэффициент ребру, соединенному с избегаемым местоположением (узлом), чем другим ребрам, и вычислять маршрут движения, который не проходит через взвешенное ребро. Результат вычисления из модуля 2 вычисления маршрута движения выводится в модуль 10 управления приведением в движение. Последовательность операций управления, проиллюстрированная на фиг. 3, в силу этого завершается.
[0067] Таким образом, в одном или более вариантов осуществления настоящего изобретения, когда рассматриваемое транспортное средство планирует двигаться по маршруту, и маршрут включает в себя перекресток со светофорами, через который должно проезжать рассматриваемое транспортное средство, затруднение при распознавании светофора определяется на основе диапазона обнаружения бортового датчика 12 до того, как рассматриваемое транспортное средство фактически приближается к перекрестку. Следовательно, можно определять то, следует проезжать через или избегать перекрестка с этим светофором. Также можно вычислять маршрут движения, который обеспечивает возможность транспортному средству с поддержкой помощи при вождении или транспортному средству с поддержкой автономного приведения в движение легко распознавать признаки и двигаться в соответствии с ними.
[0068] Как указано выше, в одном или более вариантов осуществления настоящего изобретения, измеряется требуемое расстояние распознавания от рассматриваемого транспортного средства до признака, которое требуется для распознавания признака. Затем затруднение при распознавании признака определяется на основе диапазона обнаружения датчика 12 и требуемого расстояния распознавания, и маршрут движения вычисляется при одновременном избегании местоположения, в котором определяется то, что распознавание признака является затруднительным. Посредством этой операции, маршрут движения рассматриваемого транспортного средства в пункт назначения вычисляется в соответствии с распознаваемостью признака, который требуется при принятии решения по действию. Поскольку транспортное средство с поддержкой помощи при вождении или транспортное средство с поддержкой автономного приведения в движение в силу этого может вычислять маршруты, по которым транспортное средство может двигаться, и маршруты, по которым транспортному средству затруднительно двигаться, транспортное средство с поддержкой помощи при вождении или транспортное средство с поддержкой автономного приведения в движение вычисляет маршрут, на котором транспортное средство может легко распознавать признак.
[0069] В одном или более вариантов осуществления настоящего изобретения, когда определенный признак расположен в позиции, отделенной от рассматриваемого транспортного средства на требуемое расстояние распознавания, и определенный признак существует за пределами диапазона обнаружения датчика 12, выполняется определение в отношении того, что распознавание признака является затруднительным. Таким образом, то, является или нет затруднительным распознавание признака, может определяться в соответствии с диапазоном обнаружения датчика 12.
[0070] В одном или более вариантов осуществления настоящего изобретения, оценивается скорость транспортного средства для рассматриваемого транспортного средства, и требуемое расстояние распознавания измеряется на основе оцененной скорости транспортного средства. Это обеспечивает возможность измерения требуемого расстояния распознавания в состоянии транспортного средства при фактическом движении по маршруту движения.
[0071] В одном или более вариантов осуществления настоящего изобретения, разрешенная скорость оценивается как скорость транспортного средства, и требуемое расстояние распознавания измеряется на основе разрешенной скорости. Это обеспечивает возможность определения затруднения при распознавании признака в наиболее серьезном состоянии по скорости.
[0072] В одном или более вариантов осуществления настоящего изобретения, скорость транспортного средства при движении в предыдущие времена оценивается как скорость транспортного средства, и требуемое расстояние распознавания измеряется на основе оцененной скорости. Это обеспечивает возможность определения затруднения при распознавании признака в соответствии с фактическим состоянием движения.
[0073] В одном или более вариантов осуществления настоящего изобретения, диапазон обнаружения датчика 12 задается в соответствии с типичным значением датчика 12. Это обеспечивает возможность отражения ошибки датчика 12 и тенденции диапазона обнаружения датчика 12 при определении затруднения признака.
[0074] В одном или более вариантов осуществления настоящего изобретения, требуемое расстояние распознавания измеряется на основе поведения рассматриваемого транспортного средства. Посредством этой операции, требуемое расстояние распознавания измеряется с учетом типичного поведения рассматриваемого транспортного средства. Плавное приведение в движение по сравнению с вождением водителями-людьми в силу этого может быть реализовано даже в транспортном средстве с поддержкой помощи при вождении или транспортном средстве с поддержкой автономного приведения в движение.
[0075] В модифицированном примере настоящего изобретения, модуль 6 определения распознавания может задавать диапазон обнаружения датчика 12 в соответствии с загруженным состоянием маршрута движения. Данные, представляющие загруженное состояние маршрута движения, могут сохраняться в базе 11 данных или также могут получаться извне по отношению к транспортному средству. Загруженное состояние представляет собой загруженное транспортными средствами состояние при движении к признаку в качестве объекта, для которого затруднение при распознавании определяется. Например, когда, в схеме по фиг. 2, маршрут движения постоянно загружен транспортными средствами в течение определенного периода времени, другое транспортное средство может существовать между рассматриваемым транспортным средством и светофором 101, которое загораживает светофор 101, так что диапазон обнаружения датчика 12 ограничивается расстоянием от рассматриваемого транспортного средства до другого транспортного средства. На маршруте движения, который предположительно должен быть загружен транспортными средствами, в силу этого модуль 6 определения распознавания уменьшает диапазон обнаружения по мере того, как увеличивается степень загруженного транспортными средствами состояния. Когда загруженное транспортными средствами состояние является временным, модуль 6 определения распознавания может задавать диапазон обнаружения датчика 12 в соответствии с типичным значением. Посредством вышеуказанной операции, когда диапазон обнаружения датчика 12 варьируется в соответствии с ожидаемой загруженной транспортными средствами ситуацией, может выполняться определение в отношении того, является или нет распознаваемой информация признаков, требуемая при принятии решения по действию, с учетом диапазона обнаружения.
[0076] Выше описывается пример, в котором устройство вычисления маршрута движения оснащено в транспортном средстве с поддержкой автономного приведения в движение, но устройство вычисления маршрута движения также может быть оснащено в транспортном средстве с поддержкой помощи при вождении. Транспортное средство с поддержкой помощи при вождении представляет собой транспортное средство, к которому применяется помощь при вождении, с тем чтобы помогать при вождении транспортного средства водителем, например, при вождении при смене полосы движения. Когда осуществляется помощь в смене полосы движения с использованием датчика, такого как камера, в транспортном средстве с поддержкой помощи при вождении, осуществляется помощь при вождении при распознавании местоположения смены полосы движения. Устройство вычисления маршрута движения вычисляет маршрут движения, на котором может легко распознаваться местоположение смены полосы движения. Затем осуществляется помощь при вождении транспортного средства с поддержкой помощи при вождении на основе вычисленного маршрута движения.
[0077] Устройство вычисления маршрута движения может вычислять маршрут движения не только тогда, когда транспортное средство движется, но также и тогда, когда транспортное средство останавливается.
[0078] Вышеуказанный модуль 2 вычисления маршрута движения соответствует "модулю вычисления маршрута движения" настоящего изобретения, модуль 3 получения информации соответствует "модулю получения информации" настоящего изобретения, модуль 4 измерения расстояния соответствует "модулю измерения расстояния" настоящего изобретения, модуль 5 оценки скорости транспортного средства соответствует "модулю оценки скорости транспортного средства" настоящего изобретения, модуль 6 определения распознавания соответствует "модулю определения" настоящего изобретения, и датчик 12 соответствует "модулю обнаружения признаков" настоящего изобретения.
[0079] Второй вариант осуществления
Фиг. 5 является блок-схемой устройства вычисления маршрута движения согласно другому варианту осуществления настоящего изобретения. По сравнению с вышеописанным первым вариантом осуществления, этот вариант осуществления отличается тем, что устройство вычисления маршрута движения содержит модуль 8 вычисления неохватываемой величины. Другие признаки являются идентичными признакам в вышеописанном первом варианте осуществления, и описание заимствуется в данном документе.
[0080] Модуль 6 определения распознавания имеет модуль 7 задания избегаемых местоположений и модуль 8 вычисления неохватываемой величины. Модуль 8 вычисления неохватываемой величины вычисляет неохватываемую величину требуемого расстояния распознавания, идущего за пределами диапазона обнаружения датчика 12. Модуль 6 определения распознавания определяет затруднение при распознавании признака на основе вычисленной неохватываемой величины.
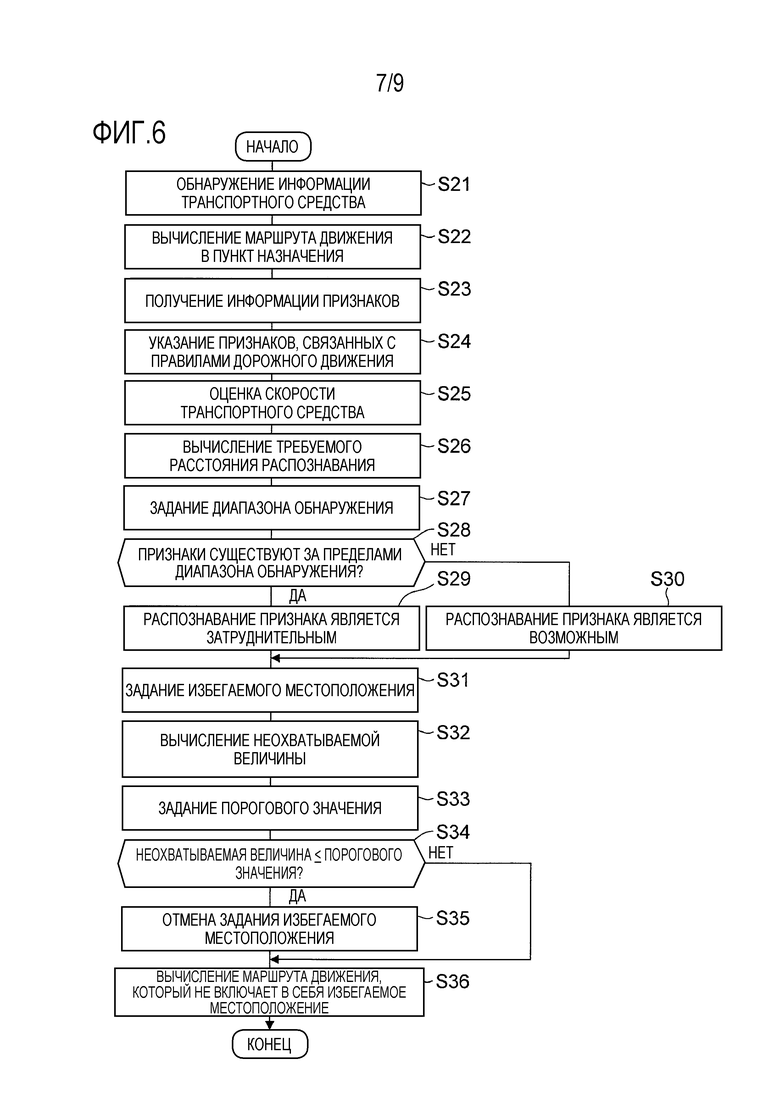
[0081] Далее описывается управление посредством устройства вычисления маршрута движения со ссылкой на конкретный пример. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций управления посредством устройства вычисления маршрута движения.
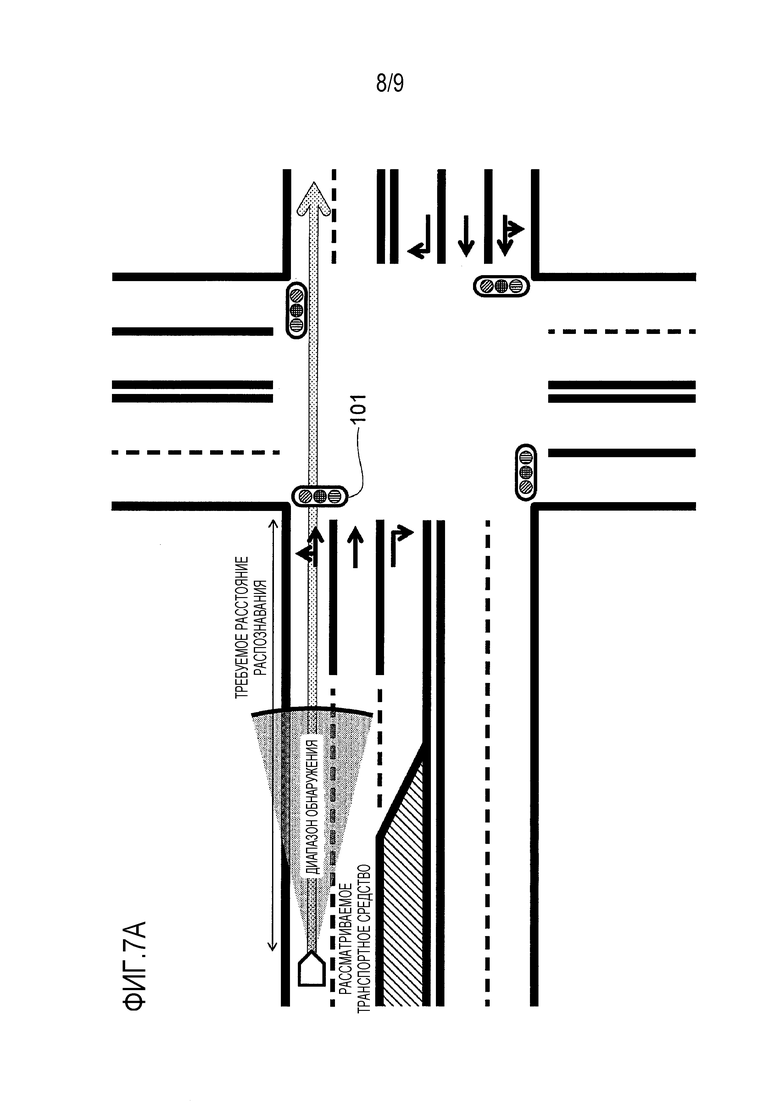
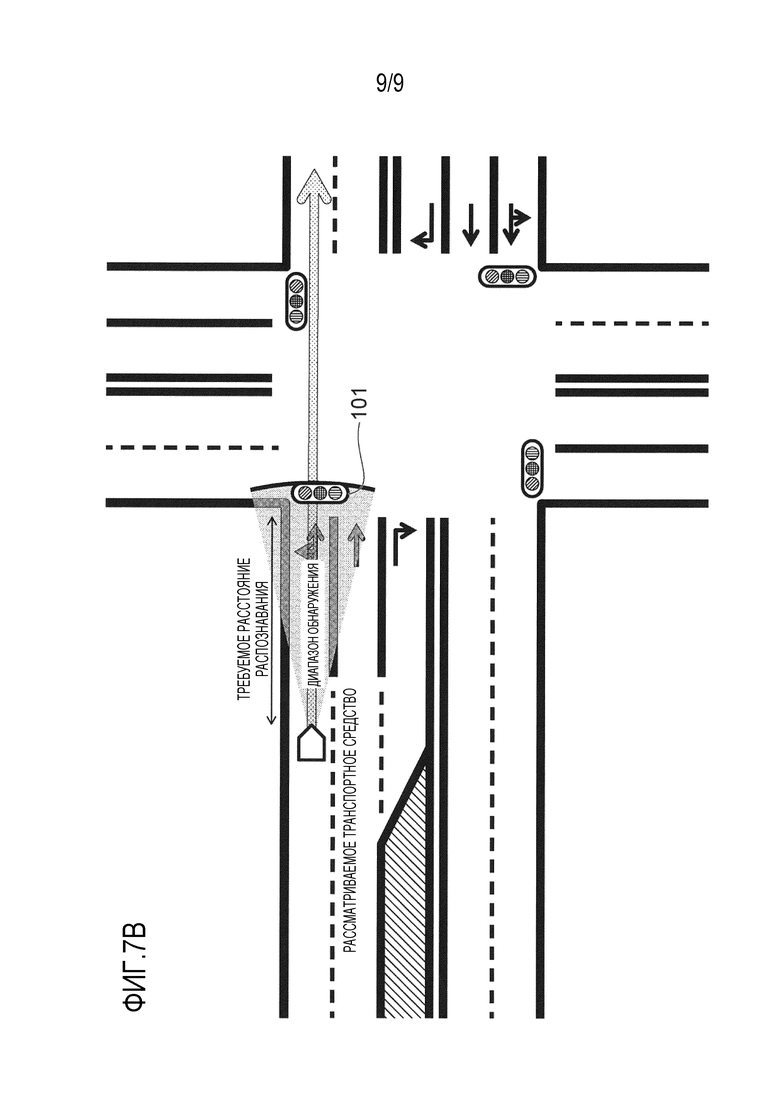
[0082] Фиг. 7A и фиг. 7B являются видами, иллюстрирующими схему перекрестка. Фиг. 7A и фиг. 7B являются видами для описания состояний, в которых рассматриваемое транспортное средство, движущееся перед перекрестком, замедляет свою скорость транспортного средства с 60 км/ч до 40 км/ч. Фиг. 7A иллюстрирует состояние, в котором рассматриваемое транспортное средство движется на скорости транспортного средства (60 км/ч) перед замедлением, и фиг. 7B иллюстрирует состояние, в котором рассматриваемое транспортное средство движется на скорости транспортного средства (40 км/ч) после замедления.
[0083] Последовательность операций управления для этапов S21-S31 является идентичной последовательности операций управления для этапов S1-S11 первого варианта осуществления.
[0084] На этапе S32, модуль 8 вычисления неохватываемой величины вычитает диапазон обнаружения из требуемого расстояния распознавания, чтобы вычислять неохватываемую величину. Требуемое расстояние распознавания, для которого вычисляется неохватываемая величина, представляет собой требуемое расстояние распознавания в местоположении, в котором определяется то, что распознавание признака является затруднительным. Допустим, что, например, в примере по фиг. 7A, светофор 101 определяется в качестве признака, который затруднительно распознавать, и светофор со светофором 101 задается в качестве избегаемого местоположения. Как проиллюстрировано на фиг. 7A, требуемое расстояние распознавания соответствует расстоянию торможения рассматриваемого транспортного средства, которое составляет приблизительно 95 м, когда замедление составляет 0,15 G. Когда диапазон обнаружения датчика 12 составляет 50 м, неохватываемая величина составляет 45 м, что представляет собой разность между требуемым расстоянием распознавания и диапазоном обнаружения.
[0085] В примере по фиг. 7A, перекресток задается в качестве избегаемого местоположения, поскольку требуемое расстояние распознавания превышает диапазон обнаружения на неохватываемую величину (45 м). Поскольку требуемое расстояние распознавания соответствует расстоянию торможения рассматриваемого транспортного средства, неохватываемая величина уменьшается по мере того, как уменьшается расстояние торможения. Таким образом, когда транспортное средство, движущееся перед перекрестком, в достаточной степени замедляется относительно скорости транспортного средства 60 км/ч, требуемое расстояние распознавания уменьшается, чтобы получать состояние, в котором может отменяться задание избегаемого местоположения на перекрестке.
[0086] Допустим, что, например, в схеме, проиллюстрированной на фиг. 7A, рассматриваемое транспортное средство может предварительно замедляться до 40 км/ч с учетом изменения индикатора светофора 101 рядом с перекрестком. В качестве другой ситуации, при повороте направо или налево на перекрестке, например, рассматриваемое транспортное средство, возможно, должно временно замедляться или останавливаться. Когда рассматриваемое транспортное средство движется перед перекрестком в соответствии со схемой и т.п. маршрута движения и дороги, в силу этого транспортное средство должно инициировать свое поведение, к примеру, поведение замедления до скорости транспортного средства ниже разрешенной скорости. Когда скорость транспортного средства составляет 40 км/ч, и замедление составляет 0,15 G, расстояние торможения составляет 42 м. Как проиллюстрировано на фиг. 7B, требуемое расстояние распознавания не превышает диапазон обнаружения. Следовательно, в этом случае светофор 101 представляет собой признак, который является распознаваемым посредством рассматриваемого транспортного средства. Таким образом, задание избегаемого местоположения на перекрестке может отменяться.
[0087] В примерах по фиг. 7A и фиг. 7B, по мере того, как уменьшается скорость транспортного средства с 60 км/ч до 40 км/ч, расстояние торможения также уменьшается с 95 м до 42 м, так что разность составляет приблизительно 53 м. Неохватываемая величина составляет 45 м в примере по фиг. 4A, тогда как, в примере по фиг. 4B, неохватываемая величина не превышает 0 м, поскольку требуемое расстояние распознавания уменьшается вследствие уменьшения скорости. Таким образом, когда неохватываемая величина не превышает величину уменьшения требуемого расстояния распознавания вследствие замедленной скорости транспортного средства, задание избегаемого местоположения может отменяться.
[0088] На этапе S33, модуль 6 определения распознавания устанавливает пороговое значение на основе схемы дороги, заданной в качестве избегаемого местоположения, и вычисленного маршрута движения. Пороговое значение представляет величину уменьшения требуемого расстояния распознавания вследствие замедленной скорости транспортного средства. По мере того, как увеличивается величина замедления скорости транспортного средства, пороговое значение также увеличивается. Например, когда вычисленный маршрут движения включает в себя правый или левый поворот на перекрестке, рассматриваемое транспортное средство уменьшает свою скорость транспортного средства при приближении к перекрестку. Также в таком случае, большое пороговое значение задается. Например, в примерах по фиг. 7A и фиг. 7B, по мере того, как уменьшается скорость транспортного средства с 60 км/ч до 40 км/ч, величина уменьшения требуемого расстояния распознавания составляет 53 м (=95 м - 42 м). Модуль 6 определения распознавания, следовательно, устанавливает пороговое значение в 53 м.
[0089] На этапе S34, модуль 6 определения распознавания сравнивает неохватываемую величину с пороговым значением. Когда неохватываемая величина не превышает пороговое значение, модуль 6 определения распознавания определяет, на этапе S35, то, что признак в местоположении, заданном в качестве избегаемого местоположения, является распознаваемым. Затем модуль 7 задания избегаемых местоположений отменяет задание избегаемого местоположения, имеющего признак. С другой стороны, когда неохватываемая величина превышает пороговое значение, модуль 7 задания избегаемых местоположений не отменяет задание избегаемого местоположения.
[0090] На этапе S36, модуль 2 вычисления маршрута движения вычисляет маршрут движения из текущей позиции транспортного средства в пункт назначения при одновременном избегании избегаемого местоположения.
[0091] В примерах по фиг. 7A и фиг. 7B, задание избегаемого местоположения на перекрестке отменяется, поскольку неохватываемая величина (45 м = требуемое расстояние распознавания (95 м) - диапазон обнаружения (50 м)) не превышает пороговое значение (53 м). Затем модуль 2 вычисления маршрута движения вычисляет маршрут движения, который включает в себя перекресток, проиллюстрированный на фиг. 7A и фиг. 7B.
[0092] Когда существует определенное число избегаемых местоположений, заданных на этапе S31, может быть предусмотрен случай, в котором если предпринимается попытка избегать всех избегаемых местоположений, не существует маршрутов, которые обеспечивают возможность автономного приведения в движение. В таком случае, согласно настоящему варианту осуществления, вычисляется неохватываемая величина в каждом избегаемом местоположении, и выполняется определение в отношении того, может или нет задание избегаемого местоположения отменяться с учетом замедления рассматриваемого транспортного средства.
[0093] Таким образом, в одном или более вариантов осуществления настоящего изобретения, когда рассматриваемое транспортное средство планирует двигаться по маршруту, и маршрут включает в себя перекресток со светофорами, через который должно проезжать рассматриваемое транспортное средство, затруднение при распознавании светофора определяется на основе диапазона обнаружения бортового датчика 12 до того, как рассматриваемое транспортное средство фактически приближается к перекрестку, и местоположение, имеющее такой признак, что затруднительно распознавать, задается в качестве избегаемого местоположения. Для избегаемого местоположения, заданного таким способом, вычисляется неохватываемая величина, и пороговое значение и неохватываемая величина сравниваются. Затем на основе результата сравнения, выполняется определение в отношении того, следует или нет отменять задание избегаемого местоположения. Это обеспечивает возможность вычисления маршрута движения, который представляет собой маршрут, по которому может двигаться транспортное средство с поддержкой помощи при вождении или транспортное средство с поддержкой автономного приведения в движение, и который представляет плавное поведение.
[0094] Как указано выше, в одном или более вариантов осуществления настоящего изобретения, неохватываемая величина требуемого расстояния распознавания вычисляется относительно диапазона обнаружения датчика 12, и затруднение при распознавании признака определяется на основе неохватываемой величины. Посредством этой операции, местоположение с небольшой неохватываемой величиной не должно обязательно представлять собой избегаемое местоположение и может быть включено в маршрут, чтобы вычислять маршрут движения.
[0095] В одном или более вариантов осуществления настоящего изобретения, неохватываемая величина вычисляется на основе величины замедления скорости транспортного средства для рассматриваемого транспортного средства. Посредством этой операции, даже если существует местоположение, которое должно избегаться при обычном движении, местоположение может быть включено в маршрут движения, при условии, что рассматриваемое транспортное средство может двигаться через местоположение при замедлении.
[0096] Модуль 6 определения распознавания задает местоположение в качестве избегаемого местоположения в результате процесса управления для этапов S28-S31 и отменяет задание в результате процесса управления для этапов S32-S35. Это управление может модифицироваться таким образом, что избегаемое местоположение задается, когда удовлетворяется условие "Да" этапа S28 и условие "Да" этапа S34.
[0097] В модифицированном примере настоящего изобретения, модуль 6 определения распознавания вычисляет неохватываемые величины для каждого из множества маршрутов движения в каждом из множества местоположений, присутствующих на каждом маршруте движения, и вычисляет сумму неохватываемых величин на каждом из множества маршрутов движения. Множество местоположений представляют местоположения, которые имеют признак, который должен распознаваться посредством рассматриваемого транспортного средства, когда рассматриваемое транспортное средство принимает решение по действию. Затем модуль 2 вычисления маршрута движения вычисляет маршрут движения, с тем чтобы исключать маршрут движения, на котором сумма является наибольшей, из множества маршрутов движения из возможных вариантов для маршрута движения, по которому движется рассматриваемое транспортное средство. Посредством этой операции, можно исключать маршрут, неподходящий для движения, к примеру, маршрут движения, который не является линейным, и маршрут движения, на котором число замедлений является большим, из множества маршрутов движения, и может вычисляться более естественный маршрут движения. В альтернативном варианте осуществления, модуль 6 определения распознавания может вычислять число неохватываемых величин выше предварительно определенного значения на каждом маршруте движения в качестве подстановки в сумму неохватываемых величин, и модуль 2 вычисления маршрута движения может вычислять маршрут движения, с тем чтобы исключать маршрут движения, на котором число неохватываемых величин является наибольшим, из возможных вариантов для маршрута движения, по которому движется рассматриваемое транспортное средство.
Описание номеров ссылок
[0098] 1 - модуль обнаружения информации транспортного средства
2 - модуль вычисления маршрута движения
3 - модуль получения информации
4 - модуль измерения расстояния
5 - модуль оценки скорости транспортного средства
6 - модуль определения распознавания
7 - модуль задания избегаемых местоположений
8 - модуль вычисления неохватываемой величины


Изобретение относится к области навигационного приборостроения и может найти применение в системах позиционирования и навигации подвижных транспортных средств. Технический результат – повышение надежности. Для этого устройство вычисления маршрута движения включает в себя модуль вычисления маршрута движения, выполненный с возможностью вычислять маршрут движения для прибытия рассматриваемого транспортного средства в пункт назначения, модуль обнаружения признаков, выполненный с возможностью обнаруживать признак, и модуль измерения расстояния, выполненный с возможностью измерять расстояние от рассматриваемого транспортного средства до признака в качестве требуемого расстояния распознавания. Устройство вычисления маршрута движения дополнительно включает в себя модуль определения, выполненный с возможностью определять затруднение при распознавании признака на основе диапазона обнаружения модуля обнаружения признаков и требуемого расстояния распознавания. Модуль вычисления маршрута движения вычисляет маршрут движения при одновременном избегании местоположения, в котором распознавание признака определено как затруднительное посредством модуля определения. 10 з.п. ф-лы, 9 ил.
1. Устройство вычисления маршрута движения, содержащее:
- модуль вычисления маршрута движения, выполненный с возможностью вычислять маршрут движения для прибытия рассматриваемого транспортного средства в пункт назначения;
- модуль обнаружения признаков, выполненный с возможностью обнаруживать признак;
- модуль измерения расстояния, выполненный с возможностью измерять расстояние от рассматриваемого транспортного средства до признака в качестве требуемого расстояния распознавания, причем требуемое расстояние распознавания требуется для рассматриваемого транспортного средства, чтобы распознавать признак при принятии решения по действию рассматриваемого транспортного средства; и
- модуль определения, выполненный с возможностью определять затруднение при распознавании признака на основе диапазона обнаружения модуля обнаружения признаков и требуемого расстояния распознавания,
- причем модуль вычисления маршрута движения вычисляет маршрут движения при одновременном избегании местоположения, в котором распознавание признака определено как затруднительное посредством модуля определения.
2. Устройство вычисления маршрута движения по п. 1, в котором модуль определения определяет то, что распознавание признака является затруднительным, когда определенный признак существует за пределами диапазона обнаружения, и определенный признак позиционируется в местоположении, отделенном от рассматриваемого транспортного средства на требуемое расстояние распознавания.
3. Устройство вычисления маршрута движения по п. 1, дополнительно содержащее:
- модуль оценки скорости транспортного средства, выполненный с возможностью оценивать скорость транспортного средства для рассматриваемого транспортного средства,
- при этом модуль измерения расстояния измеряет требуемое расстояние распознавания на основе скорости транспортного средства.
4. Устройство вычисления маршрута движения по п. 3, в котором модуль оценки скорости транспортного средства оценивает разрешенную скорость маршрута движения в качестве скорости транспортного средства.
5. Устройство вычисления маршрута движения по п. 3, в котором модуль оценки скорости транспортного средства оценивает скорость транспортного средства при движении по определенной дороге маршрута движения на основе скорости транспортного средства при движении по определенной дороге в прошедшее время.
6. Устройство вычисления маршрута движения по п. 1, в котором диапазон обнаружения задается в соответствии с типичным значением модуля обнаружения признаков.
7. Устройство вычисления маршрута движения по п. 1, в котором диапазон обнаружения задается в соответствии с загруженным состоянием маршрута движения.
8. Устройство вычисления маршрута движения по п. 1, в котором модуль измерения расстояния измеряет требуемое расстояние распознавания на основе поведения рассматриваемого транспортного средства.
9. Устройство вычисления маршрута движения по п. 1, в котором модуль определения:
- вычисляет неохватываемую величину требуемого расстояния распознавания, идущего за пределами диапазона обнаружения; и
- определяет затруднение при распознавании признака на основе неохватываемой величины.
10. Устройство вычисления маршрута движения по п. 9, в котором модуль определения вычисляет неохватываемую величину на основе величины замедления скорости транспортного средства для рассматриваемого транспортного средства.
11. Устройство вычисления маршрута движения по п. 9 или 10, в котором:
- модуль определения вычисляет неохватываемые величины для каждого из множества маршрутов движения в каждом местоположении признака на маршрутах движения, и
- модуль вычисления маршрута движения исключает маршрут движения из множества маршрутов движения из возможных вариантов для маршрута движения, по которому движется рассматриваемое транспортное средство, при этом исключенный маршрут движения представляет собой маршрут движения, на котором сумма неохватываемых величин является наибольшей, или маршрут движения, на котором число неохватываемых величин выше предварительно определенного значения является наибольшим.
| JP 2012247315 А, 13.12.2012 | |||
| US 20090265097 А1, 22.10.2009 | |||
| JP 2010122034 А1, 03.06.2010 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2395122C2 |
| Автомат для изготовления картонных коробочек | 1959 |
|
SU128747A1 |
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |

