Область техники
Изобретение относится к устройству тестирования (далее именуемому установкой для тестирования) контейнеров, изготовленных предпочтительно из пластиковых материалов по технологии "выдувание-наполнение-запаивание" (blow-molding, filling and sealing) и заполненных жидкостью, которая, в связи со спецификой производства, может содержать корпускулярное загрязнение, т.е. мелкие загрязняющие частицы, осаждающиеся на стенки контейнера, когда он неподвижен, и начинающие свободно плавать в жидкости, когда контейнер движется и/или по меньшей мере изменяет свое положение. Благодаря этим свойствам такие частицы могут детектироваться детекторным устройством.
Уровень техники
Контейнеры, изготовляемые по технологии "выдувание-наполнение-запаивание" (именуемой специалистами также BFS технологией), производятся, в частности, в больших количествах в форме ампул, например по способу bottelpack®, известному из уровня техники. Такие ампулы обычно используют для приема и дозированной выдачи жидкостей, применяемых в терапевтических или косметических целях. В частности, применительно к ампулам, предназначенным для использования при инъекциях, базовое условие их пригодности, в дополнение к стерильности, состоит в чистоте заполняющего материала, т.е. в отсутствии в нем любых загрязняющих частиц. Поэтому важным условием безопасности продукта является тестирование (проверка) каждого контейнера, перед его поставкой, в отношении качества заполняющего материала. Поскольку контейнеры типа ампул или бутылочек производятся по технологии BFS в больших количествах и, как следствие, при коротком производственном цикле, тестирование каждого контейнера вручную вряд ли реализуемо, так что автоматизация тестирования (контроля) посредством соответствующей установки становится неизбежной.
Как пример уровня техники в данной области документ DE 10339473 А1 описывает установку типа охарактеризованной выше, в разделе "Область техники", в которой детекторное устройство содержит, для детектирования корпускулярного загрязнения, несколько камер и поворотное зеркало. Поворотное зеркало отражает на соответствующие камеры лучи света, излучаемого лампами, после того как они пройдут сквозь контейнер. Известной установке присущи несколько недостатков. Чтобы получить, посредством камеры, изображение каждого из контейнеров, которые проходят по круговой траектории, находясь в вертикальном положении, через секцию тестирования с высокой скоростью, соответствующей скорости производственной линии, требуется большое количество камер и соответствующее количество ламп, излучение которых должно направляться, посредством отражения, на контейнеры в процессе их движения по круговой траектории.
В дополнение к значительной конструктивной сложности, такая конфигурация требует соответствующего контроля поворотных движений зеркала, который, чтобы добиться адекватной надежности тестирования, должен обеспечивать особую точность синхронизации. Кроме того, надежность результатов тестирования является неполностью удовлетворительной, поскольку в процессе движения вертикальных контейнеров по круговой траектории происходит существенное аккумулирование корпускулярного загрязнения на дне контейнера. Чтобы устранить эту проблему, в известной установке для каждого тестируемого контейнера предусмотрен поворотный столик, на котором контейнер приводится во вращение вокруг своей вертикальной оси с целью обеспечить перемешивание жидкости. Несмотря на связанную с этим значительную конструктивную сложность, надежность тестирования все еще остается весьма далекой от желаемой. Еще один недостаток состоит в том, что известная установка непригодна для тестирования контейнеров, которые экономично производятся по технологии BFS в форме так называемых контейнерные блоков, содержащих группу контейнеров, примыкающих друг к другу и соединенных друг с другом в ряд, из-за невозможности приведения каждого контейнера блока во вращение вокруг его вертикальной оси.
Раскрытие изобретения
Изобретение, базируясь на этом известном решении, направлено на создание установки, способной обеспечить экономически эффективное тестирование при повышенной надежности результатов.
Согласно изобретению данная задача решена посредством установки, обладающей всеми признаками, включенными в п. 1 прилагаемой формулы.
В соответствии с отличительной частью п. 1 важная особенность изобретения состоит в том, что тестируемый контейнер может приводиться, посредством вибрационного устройства, в осциллирующее движение с селективно задаваемой частотой возбуждения таким образом, что обеспечивается возможность детектировать корпускулярное загрязнение в жидкости. Как показали результаты тестирования, осциллирующее движение контейнеров приводит к свободному движению частиц загрязнения с различными паттернами движения в зависимости от типа частицы. В результате, по сравнению с известным вращательным движением контейнеров, могут быть достигнуты не только повышенная надежность детектирования, но также улучшенная различимость типов частиц. Особенно высокая надежность детектирования может быть обеспечена в случае соответствующей адаптации частоты возбуждения к свойствам жидкости. Так, жидкостям с высокой вязкостью соответствует полоса низких частот, до 2 кГц, а жидкостям с низкой вязкостью - полоса более высоких частот, от 2 до 10 кГц.
Особенно желательно, чтобы плоскость вибрации при осциллирующем движении была параллельна продольному направлению, предпочтительно параллельна средней плоскости контейнера, который является компонентом блока контейнеров, соединенных в ряд.
В предпочтительных вариантах частота возбуждения выбирается, в зависимости от вязкости жидкого содержимого контейнера, такой, чтобы более крупные пузырьки воздуха оставались в жидкости неподвижными, а подлежащее детектированию корпускулярное загрязнение двигалось в ней. Это позволит избежать ошибочных результатов, обусловленных детектированием пузырьков воздуха. Желательно, кроме того, выбирать частоту возбуждения так, чтобы исключить или минимизировать образование пузырьков воздуха.
Детекторное устройство может содержать по меньшей мере один излучатель, способный испускать излучение, например видимое, инфракрасное, лазерное или рентгеновское излучение, падающее, после прохождения по меньшей мере сквозь стенку контейнера и жидкость, на детектор, установленный с противоположной стороны контейнера, и генерирующее измерительный сигнал, пригодный для его анализа посредством анализатора. Тип излучения может выбираться в зависимости от прозрачности/непрозрачности стенок контейнера. Например, если стенки контейнера непрозрачны для света, можно использовать рентгеновское излучение.
Согласно особенно предпочтительным вариантам после приведения заполненного жидкостью контейнера в осциллирующее движение детектор, представляющий собой регистрирующее устройство в виде камеры, формирует несколько изображений корпускулярного загрязнения, которое движется в жидкости, а анализатор сравнивает соответствующие части изображений, полученных при отсутствии и при наличии корпускулярного загрязнения. Сравнение нескольких изображений обеспечивает высокий уровень надежности результатов. Изображения в составе одной серии могут формироваться через короткие временные интервалы, например, в течение 1 с, т.е. установка согласно изобретению пригодна для линий с высокой производительностью
В особенно предпочтительных вариантах предусмотрено манипуляторное устройство, которое вводит подлежащий тестированию контейнер, находящийся в горизонтальном положении, в станцию тестирования, а затем вводит контейнер во вторую станцию, в которой детектор находится выше, а излучатель ниже контейнера. В такой конфигурации детектор, предпочтительно в виде камеры, может быть сфокусирован снизу на нижнюю боковую стенку контейнера, тогда как во второй станции тестирования камера будет сфокусирована сверху на поверхность жидкости. В результате пузырьки воздуха, которые могли бы ошибочно идентифицироваться как корпускулярное загрязнение, могут надежно распознаваться, поскольку при горизонтальном положении контейнера они находятся на верхней боковой стенке, так что их можно будет отличить от реальных загрязняющих частиц, которые являются подвижными. Аналогично, частицы, которые были перемещены и которые имеют тенденцию прилипать к боковым стенкам, например частицы пластика, можно будет отличить от частиц, которые свободно плавают в жидкости.
Детектирование загрязняющих частиц основано на идентификации свободного движения корпускулярных материалов в контейнере, который после завершения осциллирующего движения является неподвижным. Сразу же после прекращения осцилляции жидкость еще находится в движении и создает на снимках подвижные тени, которые могут привести к ложному результату тестирования. С учетом этой проблемы в предпочтительных вариантах изобретения предусматривается, что манипуляторное устройство удерживает контейнер неподвижным в течение заданного периода успокоения до прихода жидкости в контейнере, по существу, в стабильное состояние.
Манипуляторное устройство может быть снабжено вспомогательным устройством в виде карусели, причем посредством указанных устройств контейнеры могут забираться с производственной линии и устанавливаться на нее, так что установка может встраиваться, в качестве компонента, в линию производства контейнерных продуктов, изготавливаемых по технологии BFS.
Для анализа измерительных сигналов анализатор может использовать компьютеризованные методы обработки изображений, основанные на известных алгоритмах, включая преобразования в оттенки серого, операторы точки и/или методы смешивания.
Краткое описание чертежей
Далее изобретение будет более подробно описано на примере варианта, проиллюстрированного прилагаемыми чертежами.
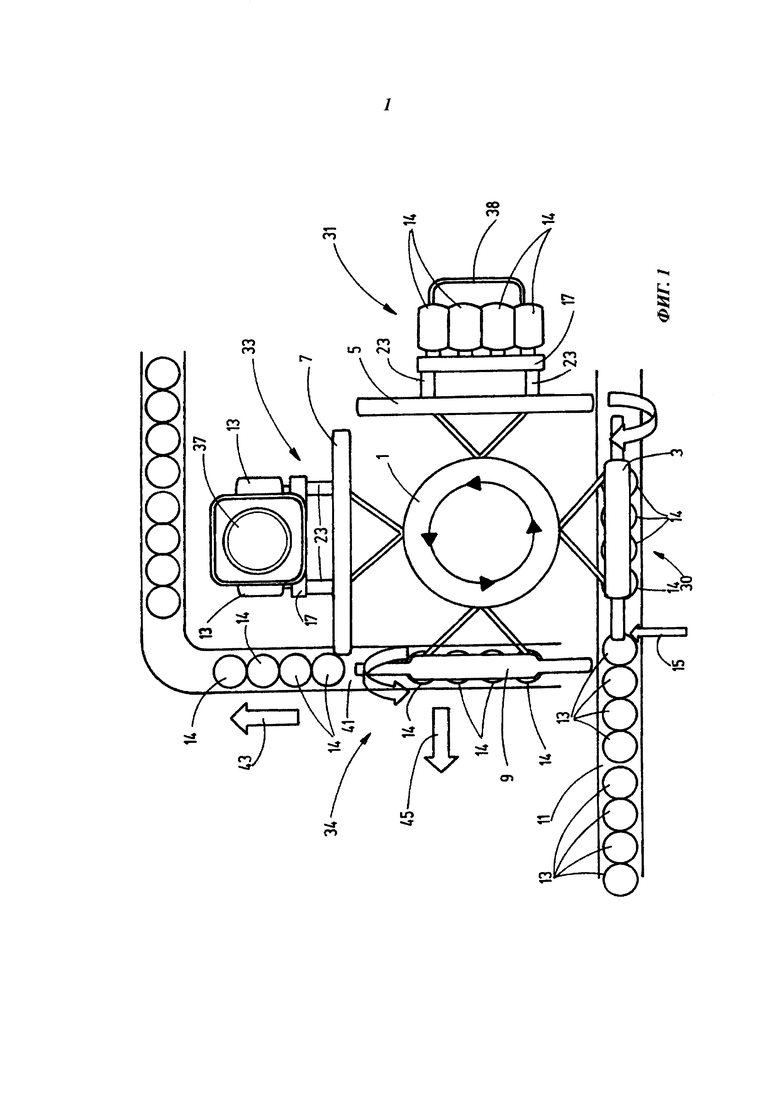
На фиг. 1 представлена очень упрощенное, схематичное изображение варианта установки согласно изобретению.
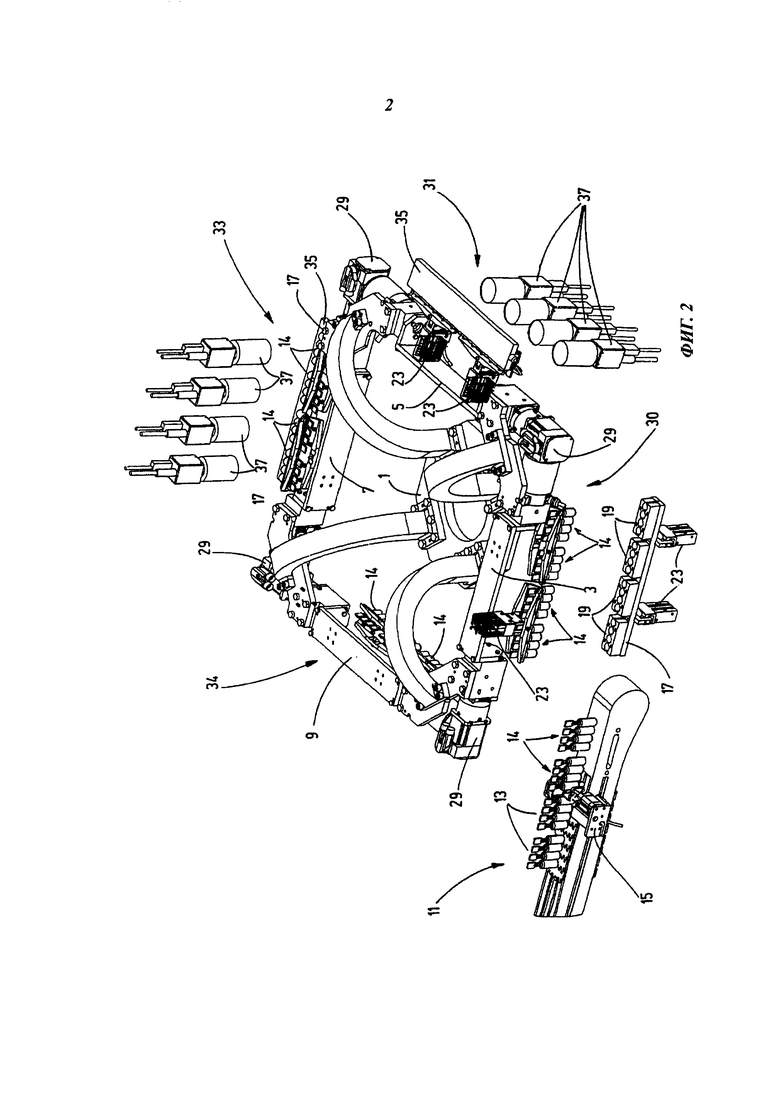
На фиг. 2 показаны, в упрощенном перспективном изображении, функциональные элементы варианта установки по фиг. 1.
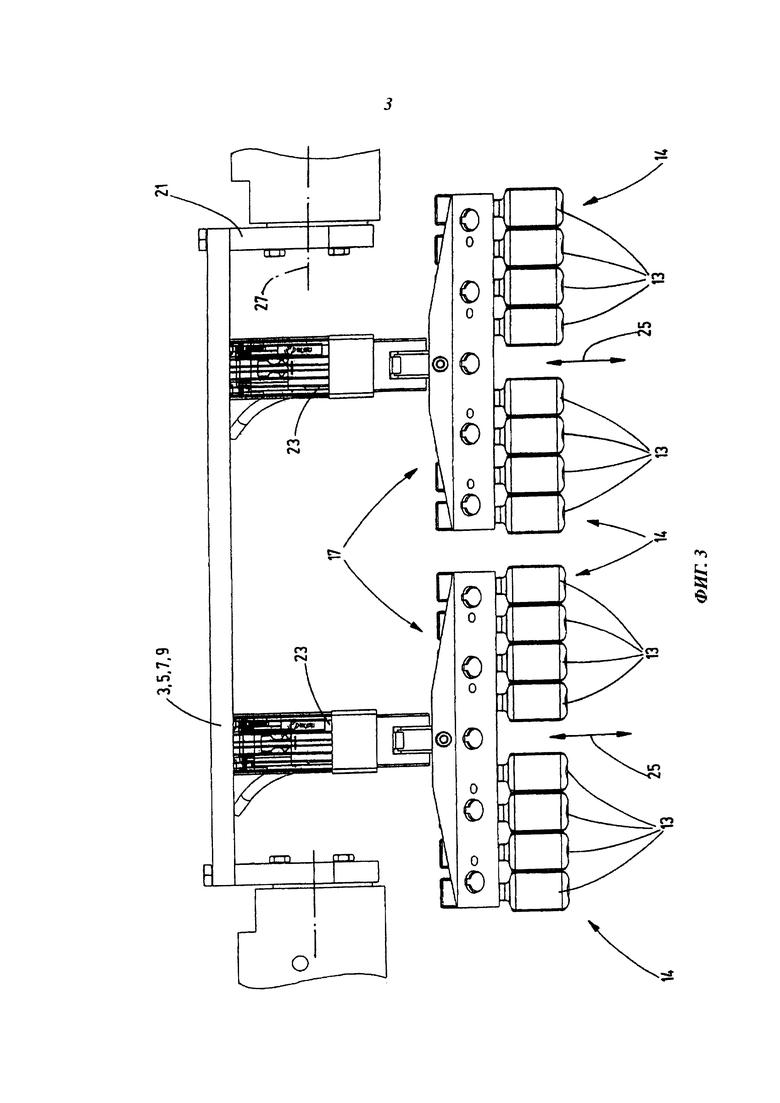
На фиг. 3 на виде сбоку, в масштабе, примерно соответствующем реальным размерам, показана часть манипуляторного устройства для варианта установки по фиг. 1.
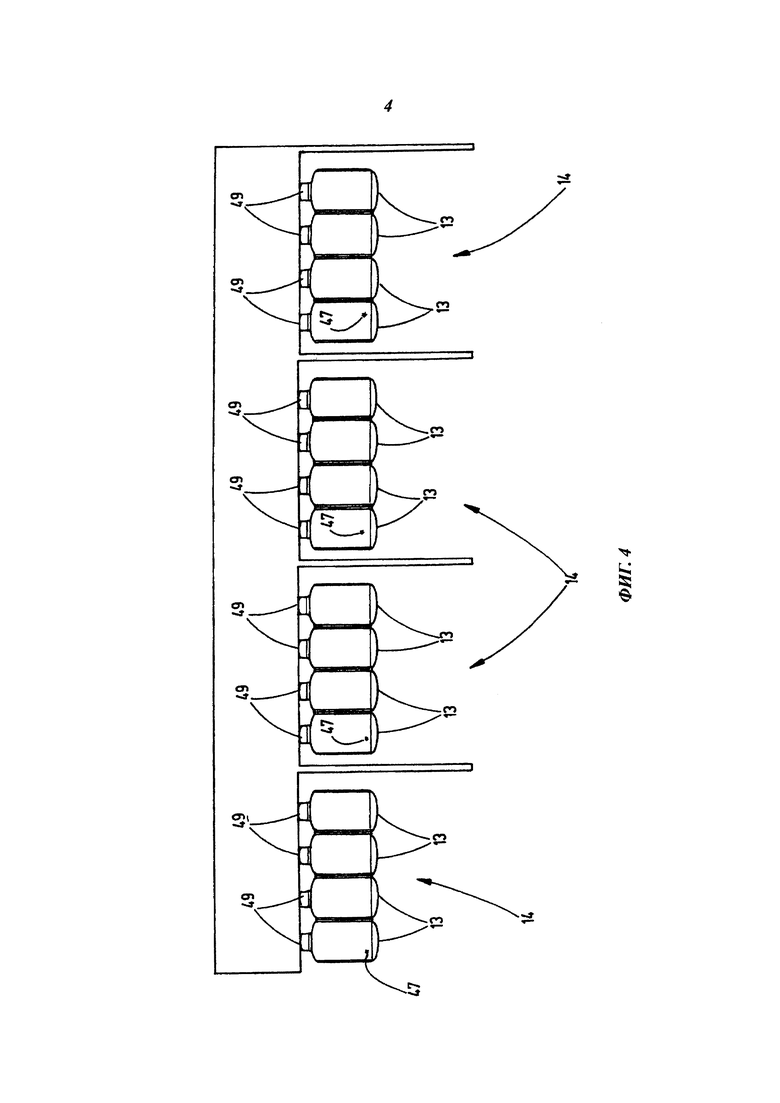
На фиг. 4 представлена серия из четырех снимков контейнерного блока с четырьмя ампулами, сделанных на станции тестирования устройства.
Осуществление изобретения
На фиг. 1 схематично показана центральная манипуляторная карусель 1, посредством которой можно перемещать захваты 3, 5, 7, 9 в направлении против часовой стрелки. Ампулы 13, подлежащие тестированию, доставляются ленточным конвейером 11 в вертикальном положении (см. фиг. 2) к захвату 3, находящемуся на станции 30 загрузки, т.е. в начале секции тестирования, основу которой составляет манипуляторная карусель 1. Непосредственно перед захватом 3 сепаратор 15, установленный у ленты конвейера, отделяет от массива контейнеров контейнерные блоки, состоящие в данном примере из четырех ампул 13.
У каждого из захватов 3, 5, 7, 9 имеется поддерживающий модуль 17. Один такой модуль показан на фиг. 2 в положении, удаленном от карусели 1 и рядом с ленточным конвейером 11. Как показано на фиг. 2, у каждого несущего модуля 17 имеется четыре приемных гнезда 19 для ампул, в каждое из которых может быть помещен контейнерный блок 14 из четырех ампул 13. Как показано на фиг. 2, закрываемые части ампул 13, находящихся внутри гнезда 19, снабжены поворотным колпачком, тогда как тело ампулы, содержащей жидкость, в случае ее захвата захватом 3 (см. фиг. 2) будет открыта. Из фиг. 2 видно также, что положение захвата 3 таково, что ампулы 13 в нем вертикальны, т.е. имеют ту же ориентацию, что и на ленточном конвейере 11.
Два электрогенератора 23, обеспечивающие вибрацию, расположены на расстоянии друг от друга, между поддерживающим модулем 17 и несущей конструкцией 21 (фиг. 3) в составе каждого захвата 3, 5, 7, 9. В процессе функционирования установки генераторы создают вибрации, направление которых отмечено на фиг. 3 двунаправленными стрелками 25 и под действием которых ампулы 13 движутся возвратно-поступательно вдоль своей продольной оси.
Несущая конструкция 21 каждого захвата 3, 5, 7, 9 может поворачиваться вокруг горизонтальной оси 27 поворота (см. фиг. 3). С этой целью несущая конструкция 21 каждого захвата 3, 5, 7, 9 связана с приводным двигателем 29 (фиг. 2). После того как четыре контейнерных блока 14, каждый из которых состоит из четырех ампул 13, будут захвачены захватом 3, свисая с него вертикально вниз (как это показано на фиг. 2), карусель 1 повернет захват 3 на 90° против часовой стрелки. В результате захват 3 приходит в положение напротив первой станции 31 тестирования, где ранее находился захват 5, который одновременно перемещается ко второй станции 33 тестирования. Во время проведения этой операции поворота приводной двигатель 29 захвата 3 поворачивает несущую конструкцию 21 на 90°, так что контейнерные блоки 14 и ампулы 13 принимают на первой станции 31 тестирования горизонтальное положение, в котором тела контейнеров повернуты в направлении от карусели 1. В первой станции 31 тестирования имеется источник света в форме панели 35 светодиодов (СД), которая расположена над всей зоной, занимаемой верхними сторонами горизонтально расположенных ампул 13, т.е. выше ампул 13 (см. фиг. 2, на которой показана только одна панель 35 СД, входящая в состав первой станции 31 тестирования). Ниже ампул 13 находятся камеры 37, служащие детекторами света, излученного панелями 35 СД и прошедшего (сверху вниз) сквозь горизонтально расположенные ампулы 13. Для каждого из четырех контейнерных блоков 14 (в каждом из которых имеются четыре ампулы 13) предусмотрена одна камера 37. В упрощенной блок-схеме по фиг. 1 четыре камеры 37 в составе первой станции 31 тестирования представлены, как блок 38 камер, причем в каждом из четырех контейнерных блоков 14 из четырех имеющихся в нем четырех ампул 13 показана только одна ампула.
В процессе функционирования, когда захват с ампулами подойдет к первой станции 31 тестирования, генераторы 23 приведут несущий модуль 17 с ампулами 13 в состояние вибрации (осцилляции) до того, как камеры 37 будут активированы для регистрации изображений. Активирование произойдет, когда генераторы 23 будут остановлены, причем первый снимок каждой камерой 37 будет сделан по истечении определенного периода успокоения, в течение которого жидкость в осциллировавших ампулах 13 стабилизируется, так что в ней будут двигаться (т.е. изменять свое положение) только свободно плавающие частицы, которые требуется детектировать. Без такого периода в качестве корпускулярного загрязнения могли бы быть ошибочно восприняты подвижные тени в движущейся жидкости. Сразу же после прекращения движения жидкости (т.е. примерно через 500 мс после завершения осцилляции) каждая камера 37 сделает свой первый снимок соответствующего ей контейнерного блока 14. Как было упомянуто, излучение на четыре ампулы 13 в каждом блоке 14 будет поступать сверху. После получения первого снимка будут иметь место, с короткими интервалами, циклы дополнительной вибрации и получения снимков. Например, с интервалами 200 мс могут быть сделаны три дополнительных снимка, так что полный цикл получения серии из четырех снимков, включая предшествующий период успокоения, будет завершен примерно за 1 с, в крайнем случае за 2 или 3 с. На фиг. 4 представлен пример соответствующей серии из четырех снимков, сделанных одной из четырех камер 37, т.е. четырех снимков одного и того же контейнерного блока 14.
Посредством дополнительного поворотного движения карусели 1 на 90° соответствующий захват переводится из первой станции 31 тестирования во вторую станцию 33 тестирования. При этом ампулы 13 остаются в том же горизонтальном положении. Как показано на фиг. 2, во второй станции 33 тестирования камеры 37 расположены выше несущего модуля 17 с ампулами 13, тогда как панель 35 с СД расположена ниже ампул. В результате камеры 37 детектируют излучение, которое проходит сквозь ампулы 13 снизу вверх. Во второй станции 33 тестирования реализуется цикл тестирования, сходный с описанным для первой станции 31, т.е. включающий осцилляцию, за которой следует фаза успокоения длительностью примерно 500 мс, и последующее получение серии из четырех снимков с промежуточными периодами вибрации.
При следующем повороте карусели 1 на 90° захват, который до этого находился во второй станции 33 тестирования (на фиг. 2 это захват 7), перемещается в следующую станцию секции (станцию 34 выведения). В процессе этого перемещения ассоциированный приводной двигатель 29 обеспечивает поворот захвата вокруг оси 27 (фиг. 3), так что контейнерные блоки 14 на станции 34 выведения оказываются свисающими вертикально вниз, т.е. имеющими ту же ориентацию, что и на станции 30 загрузки. Если анализ снимков, сделанных на первой и второй станциях 31, 33 тестирования, показал, что ампулы 13 свободны от дефектов, захват, перемещенный в станцию 34 выведения (на фиг. 1, 2 это захват 9), помещает контейнерные блоки 14 на выходной конвейер 41, который схематично изображен только на фиг. 1. Выходной конвейер 41 транспортирует бездефектные контейнерные блоки 14 в направлении, отмеченном стрелкой 43. Если тестирование выявило присутствие корпускулярного загрязнения, ни один контейнерный блок 14, содержащий дефектную ампулу 13, не будет помещен на выходной конвейер 41. Вместо этого (как показано на фиг. 1 стрелкой 45) контейнерный блок 14 отводится (как дефектный продукт) от ленты выходного конвейера 41 в сторону.
Поскольку длительность процесса тестирования на станциях 31, 33 тестирования составляет примерно 1500 мс (с учетом фазы успокоения длительностью 500 мс и последующего получения серии снимков), установка согласно изобретению способна обеспечить производительность тестирования ампул 13, соответствующую производительности стандартных BFS систем для изготовления контейнерных продуктов типа ампул. Следовательно, установка согласно изобретению может быть непосредственно интегрирована в производственную линию.
Благодаря способности детектировать, после успокоения жидкости по завершении осцилляции, различные паттерны движения, свойственные частицам, относящимся к различным типам и имеющим различные плотности, таким как металлические частицы и частицы пластика, установка согласно изобретению обеспечивает высокий уровень надежности тестирования, особенно с учетом того, что одна серия снимков делается камерой, находящейся выше горизонтально расположенных ампул 13 и сфокусированной на поверхность жидкости, а другая - камерой, находящейся ниже ампул и сфокусированной на нижнюю стенку контейнера. Металлические частицы, присутствующие, например, как следствие истирания материала производственного оборудования BFS системы, обычно (с учетом их плотности) находящиеся вблизи нижней стенки контейнера, являются непрозрачными и высококонтрастными. Поэтому они легко детектируются нижней камерой 37, сфокусированной на стенку контейнера. Частицы пластика, например из полипропилена, которые могут отделиться от материала контейнера при осуществлении метода BFS, являются полупрозрачными и малоконтрастными. Они преимущественно плавают на поверхности жидкости и поэтому легко детектируются, несмотря на малоконтрастность, верхней камерой 37, сфокусированной на поверхность жидкости. Кроме того, частицы пластика, плавающие вблизи стенки контейнера, проявляют также тенденцию "притягиваться" ближайшей к ним стенкой и прилипать к ней. Это позволяет идентифицировать их как пластиковый корпускулярный материал.
На фиг. 4 показана серия снимков единственного контейнерного блока 14. Представленный пример иллюстрирует снимки, получаемые нижней камерой, сфокусированной на стенку контейнера, т.е. ампулы 13. Последовательность снимков демонстрирует возможность детектирования металлической частицы 47, движущейся вправо и слегка смещающейся в сторону горлышка 49 ампулы. Поэтому контейнерный блок 14, показанный на фиг. 4, должен быть отведен, на станции 34 выведения, от ленты выходного конвейера 41 в направлении, отмеченном стрелкой 45.
При анализе серии снимков, показанной, в качестве примера, на фиг. 4, можно использовать методы распознавания изображений, известные из уровня техники, включая преобразования в оттенки серого, операторы точки и/или методы смешивания. При осуществлении этих методов может производиться объединение серий изображений, полученных снизу и сверху. В дополнение, может проводиться сравнение с использованием референтных изображений контейнеров, свободных от загрязнений, делающее возможной калибровку используемой системы распознавания изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ | 2018 |
|
RU2768553C1 |
| СПОСОБ ОСЛАБЛЕНИЯ ЗАРАЖЕННОСТИ КОНТЕЙНЕРНЫХ ИЗДЕЛИЙ МИКРОБИОЛОГИЧЕСКИМИ КОНТАМИНАНТАМИ | 2016 |
|
RU2720686C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ КОНТЕЙНЕРА ИЗ ПЛАСТИКА | 2015 |
|
RU2682636C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕКУЧЕЙ СРЕДОЙ | 2010 |
|
RU2574162C2 |
| УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ПЛАСТИКОВЫХ КОНТЕЙНЕРОВ | 2011 |
|
RU2556674C2 |
| СПОСОБ УМЕНЬШЕНИЯ МИКРОБИОЛОГИЧЕСКОГО ЗАГРЯЗНЕНИЯ | 2018 |
|
RU2776709C2 |
| ПЛАСТИКОВОЕ КОНТЕЙНЕРНОЕ ИЗДЕЛИЕ | 2018 |
|
RU2751496C2 |
| СПОСОБ И МАШИНА ДЛЯ ПРОИЗВОДСТВА МЕШКОВ ДЛЯ СТЕРИЛЬНОГО РАСТВОРА ПРОДУКТА | 2017 |
|
RU2685399C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ И СПОСОБ ОСНАСТКИ ГИБКОГО ПРОИЗВОДСТВЕННОГО МОДУЛЯ | 2018 |
|
RU2776710C2 |
| Приемно-отправочная станция трубопроводной контейнерной пневмотраспортной системы | 1977 |
|
SU742296A1 |
Установка для тестирования контейнеров (13), изготовленных предпочтительно из пластиковых материалов по технологии "выдувание-наполнение-запаивание" и заполненных жидкостью, которая, в связи со спецификой производства, может содержать корпускулярное загрязнение, способное осаждаться на стенки контейнера (13), когда он неподвижен, и свободно плавать в жидкости, когда контейнер (13) движется и/или изменяет свое положение, и, следовательно, пригодное для детектирования посредством детекторного устройства (37). Чтобы обеспечить надежное детектирование интересующего корпускулярного загрязнения (47), тестируемый контейнер (13) может приводиться в осциллирующее движение с селективно задаваемой частотой возбуждения. 9 з.п. ф-лы, 4 ил.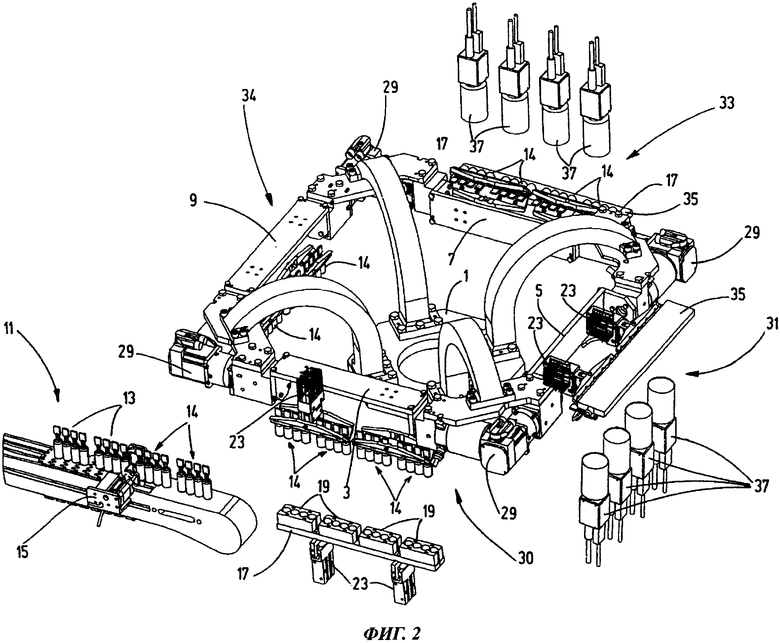
1. Установка для тестирования контейнеров (13), изготовленных предпочтительно из пластиковых материалов по технологии "выдувание-наполнение-запаивание" и заполненных жидкостью, которая, в связи со спецификой производства, может содержать корпускулярное загрязнение, способное осаждаться на стенки контейнера (13), когда он неподвижен, и свободно плавать в жидкости, когда контейнер (13) движется и/или изменяет свое положение, и, следовательно, пригодное для детектирования посредством детекторного устройства (37), отличающаяся тем, что выполнена с возможностью обеспечения условий для детектирования корпускулярного загрязнения (47) в жидкости путем приведения контейнера (13), посредством вибрационного устройства (23), в осциллирующее движение с селективно задаваемой частотой возбуждения.
2. Установка по п. 1, отличающаяся тем, что плоскость вибрации при осциллирующем движении параллельна продольному направлению, предпочтительно параллельна средней плоскости контейнера.
3. Установка по п. 1 или 2, отличающаяся тем, что контейнер (13) является компонентом блока (14) контейнеров, соединенных в ряд.
4. Установка по любому из предыдущих пунктов, отличающаяся тем, что выполнена с возможностью выбора, в зависимости от вязкости жидкого содержимого контейнера, такой частоты возбуждения, при которой более крупные пузырьки воздуха остаются в жидкости неподвижными, а подлежащее детектированию корпускулярное загрязнение (47) движется в ней.
5. Установка по любому из предыдущих пунктов, отличающаяся тем, что детекторное устройство содержит по меньшей мере один излучатель (35), способный испускать излучение, например видимое, инфракрасное, лазерное или рентгеновское излучение, падающее, после прохождения по меньшей мере сквозь стенку контейнера и жидкость, на детектор (37), установленный с противоположной стороны контейнера, и генерирующее измерительный сигнал, пригодный для его анализа посредством анализатора.
6. Установка по любому из предыдущих пунктов, отличающаяся тем, что после приведения заполненного жидкостью контейнера (13) в осциллирующее движение детектор, представляющий собой регистрирующее устройство в виде камеры (37), способен формировать несколько изображений корпускулярного загрязнения (47), которое движется в жидкости, а анализатор способен сравнивать соответствующие
части изображений, полученных при отсутствии и при наличии корпускулярного загрязнения (47).
7. Установка по любому из предыдущих пунктов, отличающаяся тем, что содержит манипуляторное устройство (3, 5, 7, 9), способное вводить подлежащий тестированию контейнер (13), находящийся в горизонтальном положении, сначала в первую станцию (31) тестирования, в которой детектор (37) находится ниже, а излучатель (35) выше контейнера (13), а затем во вторую станцию (33) тестирования, в которой детектор (37) находится выше, а излучатель (35) ниже контейнера (13).
8. Установка по любому из предыдущих пунктов, отличающаяся тем, что, манипуляторное устройство (5, 7) выполнено с возможностью удерживать контейнер (13) неподвижным в течение заданного периода успокоения до прихода жидкости в контейнере (13) в стабильное состояние.
9. Установка по любому из предыдущих пунктов, отличающаяся тем, что выполнена с возможностью, посредством манипуляторного устройства (3, 5, 7, 9) и вспомогательного устройства, выполненного в виде карусели (1), забирать контейнеры (13) с производственной линии и устанавливать их на нее.
10. Установка по любому из предыдущих пунктов, отличающаяся тем, что анализатор способен использовать для анализа измерительных сигналов компьютеризованные методы обработки изображений, включая преобразования в оттенки серого, операторы точки и/или методы смешивания.
| JPH 06160305 A, 07.06.1994 | |||
| ОПТИЧЕСКОЕ УСТРОЙСТВО С ПАРОЙ ДИФРАКЦИОННЫХ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2007 |
|
RU2458367C2 |
| JP 2001059822 A, 06.03.2001 | |||
| УЛУЧШЕННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ | 2005 |
|
RU2375699C2 |

