1. Область техники, к которой относится изобретение
Изобретение относится к технической физике, более конкретно к фотометрии, и может быть использовано для определения параметров качества оптико-электронных систем (ОЭС) путем измерения разрешающей способности (PC) и линейного разрешения (ЛР) на основе методов автоматизированной и/или автоматической обработки и анализа цифровых изображений тест-объектов, получаемых при съемке, а также в разработках конструкций тест-объектов различных оптических поддиапазонов частот электромагнитного излучения. Изобретение также может быть использовано при проведении лабораторных исследований и натурных испытаний ОЭС различного назначения.
2. Уровень техники
В настоящее время для оценки качества ОЭС предложены и широко применяются ряд способов экспериментальной оценки, которые основываются на визуальных и инструментальных методах анализа изображений различного типа тестовых объектов, формируемых исследуемой ОЭС.
В качестве метрик качества, получивших наибольшее распространение при практических исследованиях ОЭС, используют PC и ЛР.
Понятие PC известно в технической литературе достаточно давно (более ста лет) и в общем случае является мерой способности оптической или оптико-электронной системы раздельно воспроизводить (разрешать) в формируемом ею изображении мелкие детали входного (тестового) объекта, называемого также оптической мирой. Классически PC ОЭС определяется наибольшим значением частоты штрихов регулярной одномерной решетки, при котором эти штрихи на изображении еще могут быть различимы (т.е. не сливаются).
В зависимости от назначения ОЭС и по способу определения PC может быть пространственной, угловой, временной, спектральной, радиометрической. В рамках предлагаемого изобретения рассматриваются только первые два типа PC.
В качестве единиц измерения пространственной PC (ПРС), называемой также пространственной частотой, в общем виде используется число разрешаемых элементов тест-объекта на какую-либо единицу физического линейного расстояния. Традиционно для измерения ПРС используют число пар (циклов) линий (штрихов) на 1 мм в плоскости изображения [К. Миз, Т. Джеймс. Теория фотографического процесса (пер. с англ.). - Л. - 1973]. Однако в каждой отрасли промышленности и техники могут использоваться собственные единицы измерения ПРС. Например, для определения ПРС растровой фотопечатной или дисплейной техники помимо числа пар (циклов) линий на мм применяют число точек, пятен или пикселей на дюйм. При оценке ПРС авиакосмических ОЭС дистанционного зондирования земли обычно пользуются числом точек или пикселей формируемого ОЭС изображения на сантиметр или метр земной поверхности.
В качестве меры угловой PC (УРС) оптической или оптико-электронной системы, называемой также угловым разрешением, используется значение минимального плоского угла между объектами, который может разрешать система. УРС измеряется в единицах углового расстояния (градусах, минутах, секундах, радианах, градах).
С понятием ПРС связано понятие ЛР, определяющее минимальное расстояние между раздельно различимыми наименьшими близко расположенными деталями изображаемых объектов на формируемом ОЭС изображении. ЛР измеряется в единицах физической длины (нм, мкм, мм, см, м, дюймах) в зависимости от назначения ОЭС. Применительно к ОЭС дистанционного зондирования земли для понятия ЛР международно приняты термины GSD (ground sampled distance) и GRD (ground resolved distance).
В связи с тем, что математически ЛР обратно пропорционально ПРС, то к единицам измерения ЛР допустимо добавлять знаменатель, в котором указывается элемент разрешения изображения, формируемого ОЭС, например, м/пикс.
Известно несколько стандартных визуальных методов определения PC и ЛР ОЭС, во многом аналогичных друг другу и получивших широкое распространение в различных областях промышленности и техники. Описания указанных методов изложены в следующих источниках:
- ISO 12233:2017 «Фотография. Получение изображений с помощью электронных фотокамер. Разрешение и пространственная частотная характеристика»;
- ГОСТ 53466-2009 «Оптика и оптические приборы. Тепловизоры медицинские. Общие технические требования. Методы измерений основных параметров»;
- ГОСТ 21815.9-86 «Преобразователи электронно-оптические. Метод измерения рабочего разрешения»;
- ГОСТ 2819-84 «Материалы фотографические. Метод определения разрешающей способности»;
- ГОСТ 25502-82 «Объективы. Метод определения фотографической разрешающей способности»;
- ГОСТ 15114-78 «Системы телескопические для оптических приборов.
Визуальный метод определения предела разрешения»;
- NBS Standard 1010A, ISO-3334 (стандарты определения PC по штриховому тест-объекту NBS 1963A);
- NBS Circular 533-1953 (циркуляр определения PC по штриховому тест-объекту NBS 1952);
- MIL-STD-150A «Photographic lenses» (стандарт определения PC no штриховому тест-объекту USAF 1951).
Сущность всех перечисленных методов состоит в том, что определение PC оптической системы осуществляется на основе визуальных методов оценки качества изображений специальных испытательных тест-объектов, также называемых (оптическими)  . В качестве мир обычно используются штриховые (шпальные, клиновидные, решетки Ронки), кольцевые, радиальные (радиально-клиновидные, звезды Сименса), синусоидальные, комбинированные (например, радиально-тангенциальные) тест-объекты [А.И. Вейцман. Мира // Фотокинотехника: Энциклопедия / Гл. ред. Е.А. Иофис. - М.: Советская энциклопедия. - 1981].
. В качестве мир обычно используются штриховые (шпальные, клиновидные, решетки Ронки), кольцевые, радиальные (радиально-клиновидные, звезды Сименса), синусоидальные, комбинированные (например, радиально-тангенциальные) тест-объекты [А.И. Вейцман. Мира // Фотокинотехника: Энциклопедия / Гл. ред. Е.А. Иофис. - М.: Советская энциклопедия. - 1981].
Наибольшее распространение получили многоэлементные штриховые тест-объекты, ширина штрихов которых убывает (а частота возрастает) с возрастанием номера элемента в геометрической прогрессии. При этом каждый из элементов составлен из нескольких (обычно 3-4) групп штрихов, расположенных под разными углами относительно друг друга.
При определении PC по штриховым тест-объектам в известных способах (например [описание полезной модели к патенту RU 170232 U1, 18.04.2017 «Мира для настройки и определения параметров оптико-электронных систем»]) с помощью ОЭС получают изображения различных групп штрихов, которые затем анализирует оператор (специалист-дешифровщик). В результате последовательного просмотра по мере возрастания пространственной частоты штрихов миры находят наименьшую пару линий, которая еще четко различима оператором, и определяют PC как наивысшую пространственную частоту штрихов миры, в которой можно отчетливо сосчитать полное число штрихов.
К недостаткам способов определения PC и ЛР по штриховым тест-объектам относятся:
1) визуальная оценка качества изображения штрихов миры оператором, которая носит субъективный характер и зависит от количества и квалификации специалистов-дешифровщиков, принимающих участие в анализе изображений;
2) высокая относительная погрешность определения значения PC и ЛР, составляющая 10-12% (при доверительной вероятности 0,95);
3) сложность автоматизации процесса обработки и анализа изображений тест-объектов;
4) необходимость соблюдения специальных условий съемки (сравнительно узких диапазонов допустимых значений освещенности, ее равномерности, ракурса и углов съемки тест-объектов, обеспечивающих расположение штрихов миры строго параллельно фокальной плоскости ОЭС и сонаправленно координатной сетке упорядоченной регулярной структуры матричного фотоприемного устройства (МФПУ)).
Другие способы измерения PC и ЛР ОЭС, получившие меньшее распространение, основаны на использовании кольцевых и радиальных тест-объектов. Их применение существенно снижает требования к углам и ракурсам съемки по сравнению со штриховыми тест-объектами, однако прежние недостатки, такие как субъективный характер оценки и связанная с ним высокая погрешность, а также относительно высокая сложность автоматизации способов определения PC и ЛР с использованием таких тест-объектов сделали их менее применимыми на практике.
Синусоидальные тест-объекты применяются для построения частотно-контрастной характеристики (ЧКХ) ОЭС, называемой также модуляционно-передаточной функцией. Несмотря на то, что данная функция является важнейшей интегральной характеристикой, определяющей качество любой ОЭС, ее построение и анализ сопряжены с рядом технических особенностей, в связи с чем определение PC и ЛР ОЭС с использованием синусоидальных тест-объектов на текущий момент не обходится без участия специалистов-дешифровщиков.
В связи с массовым внедрением цифровой вычислительной техники становятся более актуальными способы автоматизированного определения PC и ЛР, которые опираются как на теоретические положения прикладной оптики, так и различные научно-практические и экспериментальные исследования в области оптических приборов и систем.
Известны следующие способы автоматизации определения PC и ЛР ОЭС:
а) патент на изобретение RU 2461853 С1, 20.09.2012 «Способ определения разрешающей способности фотоаппарата и набор кольцевых мир для его осуществления»;
б) патент на изобретение RU 2144654 С1, 20.01.2000 «Способ измерения разрешения на местности оптико-электронной системы дистанционного зондирования»;
в) Белоглазов И.Н. Методика автоматизированного определения разрешающей способности оптико-электронного средства по результатам экспериментального полета. - Сборник научно-методических материалов. - Изд. ВВИА им. проф. Н.Е. Жуковского. - 1993.
Способ определения PC, описанный в патенте а), базируется на использовании набора кольцевых мир, представляющих собой темные концентрические кольца на светлом фоне с неизменной толщиной темных колец в пределах одной миры, но убывающей от каждой предыдущей миры по закону геометрической прогрессии. PC ОЭС определяют в каждой точке изображения по той мире, толщина темного кольца которой еще различается в данной точке изображения, используя критерий различимости кольца миры, заключающийся в том, что среднеквадратичное отклонение (СКО) яркостей точек, лежащих на отрезке, ориентированном вдоль радиус-вектора, соединяющего эту точку с центром миры, в 3 раза превышает СКО яркостей точек, лежащих на отрезке той же длины, ориентированном перпендикулярно радиус-вектору, при этом длина каждого из отрезков составляет 4 толщины темного кольца на изображении, а центры отрезков совпадают и находятся в данной точке изображения. Недостатком данного способа является необходимость соблюдения определенного ракурса съемки, обеспечивающего расположение тест-объекта параллельно фокальной плоскости ОЭС.
Способ и методика определения PC, отмеченные в п. б) и в), основываются на математическом моделировании процесса принятия решения специалистом-дешифровщиком в задаче разрешения соответствующей группы штрихов тест-объекта. Изображения тест-объекта, сформированные исследуемой ОЭС, проходят автоматизированный анализ, после чего значение PC ОЭС определяется на основе статистических критериев обнаружения еще различимой группы штрихов с максимальной пространственной частотой с использованием стандартной модели дешифровщика [Красильников Н.Н. Теория передачи и восприятия изображений. - Изд. Радио и связь. - 1986. - С. 58-64] и пороговой амплитудной характеристики специалиста-дешифровщика. Использование различных нормированных математических моделей специалиста-дешифровщика исключает недостаток, связанный с наличием субъективного фактора в визуальных оценках PC, но при этом возникает нетривиальная задача построения адекватной математической модели дешифровщика.
По достигаемому результату наиболее близким к предлагаемому способу определения PC и ЛР является патент на изобретение RU 2293960 С1, 20.02.2007 «Способ автоматизированной оценки разрешающей способности авиационных оптико-электронных систем дистанционного зондирования в видимом и инфракрасном диапазонах волн и универсальная пассивная мира для его реализации», в связи с чем он выбран в качестве прототипа.
Прототип основан на использовании тест-объекта (миры), обеспечивающего создание яркостного и теплового контрастов с подстилающим фоном в видимом и инфракрасном спектрах, состоящий из набора штриховых клиньев с разными значениями контрастов, которые дискретно изменяются в заданном диапазоне. Способ предусматривает размещение тест-объекта на мишени, проведение съемки, предварительную обработку изображений миры, полученных в результате съемки, выделение и отбор фрагментов с изображением штриховой миры, автоматизированную оценку значений PC ОЭС по заданному отношению сигнал/шум в изображении на основе алгоритма цифрового анализа огибающих поперечных сечений изображения тест-объекта.
В прототипе предлагаемого способа для определения PC ОЭС используется клиновидный тест-объект. Поскольку клиновидная мира является вариацией классической штриховой миры, то одним из недостатков прототипа является необходимость размещения тест-объекта сонаправленно или перпендикулярно координатной сетке МФПУ исследуемой ОЭС, что предъявляет повышенные требования к точности взаимной ориентации тест-объекта и ОЭС. Более того, процесс анализа и обработки полученных изображений тест-объекта необходимо проводить дважды - отдельно для каждого из двух ортогональных направлений.
Практическое применение прототипа усложняется необходимостью априорного задания значения отношения сигнал/шум строки (или столбца) изображения тест-объекта, при котором определяется факт распознавания (разрешения) тест-объекта, и предварительного измерения яркостей на местности (или радиационных температур при определении PC в инфракрасной области электромагнитного излучения) с помощью контрольных полей яркости, размещаемых вместе с тест-объектом.
Еще одним недостатком прототипа является приблизительный характер расчета PC. Полиномиальная аппроксимация значений яркости, контраста и пространственной частоты, полученных путем корреляционного сравнения измеренного сигнала с эталонным, и последующее построение ЧКХ исследуемой ОЭС по четырем точкам позволяют классифицировать подход, предложенный в прототипе, как аппроксимационный.
Общим недостатком всех рассмотренных способов и прототипа является отсутствие кодирования какой-либо информации непосредственно в тест-объекте (т.е. в его структуре). Это не позволяет в полной мере автоматизировать процесс расчета.
В отличие от прототипа и всех рассмотренных способов предлагаемый способ определения PC и ЛР опирается на предлагаемый тест-объект, информация о пространственной частоте (периоде) которого кодируется непосредственно в его структуре, что позволяет затем считывать ее на этапе обработки. При обработке изображения тест-объекта, сформированного исследуемой ОЭС, выполняется его анализ, дешифрирование и принятие решения о его распознавании, на основании чего делается вывод о значениях PC и ЛР исследуемой ОЭС. Весь процесс от съемки до выдачи конечного результата может выполняться автоматически с помощью электронной вычислительной машины (ЭВМ, компьютера) без участия оператора.
Указанные особенности, характеризующие сущность предложенных способа и тест-объекта, не обнаружены в известных способах и тест-объектах, что позволяет сделать вывод о соответствии предложенных способа и тест-объекта критерию «существенные отличия».
Технический результат заключается в обеспечении возможности определения значений PC и ЛР ОЭС с помощью тест-объекта.
3. Раскрытие изобретения
Цель изобретения - устранение отмеченных недостатков прототипа и других известных способов определения PC и ЛР ОЭС путем обеспечения набора следующих качеств:
1) повышения точности определения значений PC и ЛР по сравнению с известными способами;
2) повышения скорости определения значений PC и ЛР по сравнению с известными способами;
3) возможности определения PC и ЛР ОЭС по всем направлениям в плоскости кадра;
4) снижения требований к условиям съемки в части ракурса, расположения тест-объекта на мишени, а также взаимного расположения тест-объекта и ОЭС, что актуально, например, при испытаниях ОЭС авиационного базирования, поскольку снимает ограничения на расположение тест-объекта строго вдоль или поперек полета летательного аппарата, и, как следствие, снижает требования к точности самолето- или вертолетовождения;
5) устранения фактора субъективности при определении PC и ЛР ОЭС за счет исключения оператора (специалиста-дешифровщика) из процесса дешифрирования;
6) общей комплексности подхода к определению PC и ЛР за счет учета способности ОЭС разрешать не только протяженные линейные объекты (в том числе с периодической структурой), но и одиночные (точечные), а также площадные, что недостижимо при использовании известных оптических тест-объектов.
Поставленная цель достигается за счет того, что в отличие от рассмотренных способов и прототипа предлагаемый способ определения PC и ЛР опирается на тест-объект, формируемый по технологиям, специально разработанным для считывания современными ОЭС с МФПУ.
Технический результат заключается в повышении точности и скорости, а также упрощении процесса определения значений PC и ЛР ОЭС с помощью тест-объекта, причем указанный процесс может выполняться автоматически с помощью ЭВМ без участия оператора.
Указанный технический результат достигается за счет того, что предлагаемый способ автоматического определения разрешающей способности и линейного разрешения оптико-электронных систем представляет собой последовательность этапов следующего содержания.
На первом этапе на поверхности (мишени) размещают тест-объекты в поле зрения исследуемой ОЭС и выполняют с ее помощью съемку. Причем при съемке тест-объектов допускается варьирование (изменение) значения ракурса съемки (углов места и азимута между визирной осью ОЭС и нормалью к плоскости тест-объекта). Также допускается, чтобы углы поворота ОЭС вокруг визирной оси и тест-объектов вокруг нормали были произвольными.
На втором этапе полученные в результате съемки изображения тест-объектов вручную или автоматически заносят в память ЭВМ для последующего анализа и обработки. При необходимости в память ЭВМ до или после съемки (но до начала анализа и обработки) заносят сведения, характеризующие пространственную частоту (период) каждого тест-объекта.
Кроме того, значение расстояния от точки съемки до n-го тест-объекта (дальности съемки) dn либо заносят в память ЭВМ, либо определяют, исходя из известных характеристик тест-объекта и тестируемой ОЭС, из соотношения:
 ,
,
где:
Ln - характерный линейный размер модулей символа(-ов) n-го тест-объекта;
а - линейный размер сенселя МФПУ ОЭС;
ƒn - фокусное расстояние объектива ОЭС при съемке n-го тест-объекта.
Третий этап - этап анализа и обработки сформированных исследуемой ОЭС изображений тест-объектов - начинают с выбора из всех изображений фрагментов, в которых содержатся символы тест-объектов. Выбор может выполняться вручную оператором или автоматически. Ручной выбор может осуществляться, например, путем нанесения («накидывания») виртуальной ограничительной рамки вокруг фрагментов или указанием любого одного пикселя внутри интересующих фрагментов с последующим автоматическим «допоиском» символов тест-объектов на изображениях. При автоматическом выборе фрагментов участие оператора на третьем этапе не требуется.
Четвертый этап - этап дешифрирования - выполняют путем считывания и декодирования информации, закодированной в символах тест-объектов, изображенных на выбранных фрагментах, и характеризующей пространственную частоту (период) тест-объектов. При этом в одном или нескольких тест-объектах в одной или нескольких зонах кадра должен встретиться один или несколько символов, при дешифрировании которых обнаруживается ошибка, свидетельствующая о невозможности их считывания и/или декодирования, что указывает на то, что данные символы тест-объектов в данных зонах кадра находятся за пределом разрешения исследуемой ОЭС.
Локальные (в зонах кадра) и интегральное (по всему полю кадра) значения PC и ЛР исследуемой ОЭС определяют на основании анализа и обработки других изображений тест-объектов, полученных в результате съемки, путем выбора наименьших по площади (наибольших по значению пространственной частоты) успешно дешифрированных символов в интересующих зонах кадра, декодированная информация с которых соотносится со сведениями, характеризующими пространственную частоту (период) тест-объекта в данных зонах кадра.
Локальные значения ЛР, ПРС и УРС в i-ой зоне кадра  определяются следующими соотношениями:
определяются следующими соотношениями:
 ,
,
 ,
,
 ,
,
где:
 - характерный линейный размер модулей наименьшего по площади (наибольшего по значению пространственной частоты) успешно декодированного символа тест-объекта в i-ой зоне кадра, имеющий ту же размерность, что d;
- характерный линейный размер модулей наименьшего по площади (наибольшего по значению пространственной частоты) успешно декодированного символа тест-объекта в i-ой зоне кадра, имеющий ту же размерность, что d;
d - расстояние (дальность) съемки;
n - количество используемых тест-объектов.
Интегральные значения ЛР, ПРС и УРС по всему полю кадра определяют в соответствии со следующими соотношениями:
 ,
,
 ,
,
 ,
,
где z - число зон кадра, эквивалентное числу символов в группе, z≥1,  .
.
Важно пояснить соотношения, связывающие ЛР и ПРС. В настоящее время в связи широким распространением цифровой оптико-электронной техники изменилась трактовка понятия «линия миры». Пару из светлой и темной полос стали считать за две линии [Никитин В.Н., Семенцов А.В. Определение разрешающей способности фотоаппарата по наклонным снимкам с использованием радиальных мир // Интерэкспо Гео-Сибирь. - №4. - Т. 1. - 2012]. В связи с этим в формулах, связывающих ЛР с ПРС, применяется коэффициент пропорциональности, равный 2.
В качестве тест-объектов для выполнения вышеописанного способа предлагается использовать символы или группы символов, представляющие(-их) собой двухмерную регулярную структуру из темных (теплых) и светлых (холодных) модулей, линейные размеры которых характеризуют пространственную частоту (период) тест-объектов, а количество, состав и пространственное расположение упомянутых модулей кодирует в двоичном (бинарном) формате цифровой код, значение которого заранее известно.
Характерный линейный размер Ln модулей символа(-ов) n-го тест-объекта изменяется с шагом дискретизации (1+q), то есть

в диапазоне, заданном исходя из априорно известных или предполагаемых технических характеристик исследуемой ОЭС - частоты Найквиста, линейного размера сенселя МФПУ, относительного отверстия объектива.
Значение приращения q шага дискретизации выбирается (задается) исходя из требуемой точности определения значений PC и ЛР исследуемой ОЭС и определяет инструментальную погрешность предлагаемого способа.
Систематическая погрешность предлагаемого способа определения PC и ЛР с помощью предлагаемого тест-объекта определяется методической (основной) и инструментальной (дополнительной) погрешностями как 3q.
Базовый характерный линейный размер Lбаз модулей наименьшего(-их) по площади (наибольшего(-их) по значению пространственной частоты) используемого(-ых) символа(-ов) тест-объекта определяется соотношением:

где:
а - линейный размер сенселя МФПУ ОЭС;
d - расстояние (дальность) съемки;
ƒ - фокусное расстояние объектива ОЭС;
k - дополнительный числовой коэффициент.
Описанные тест-объекты могут быть реализованы на основе технологий QR code, Aztec Code, Data Matrix, Maxi Code, ShotCode или других аналогичных технологий таким образом, что модули символов тест-объектов могут быть структурированы, например, в квадратную или круговую матрицу, быть, например, номинально квадратными, треугольными, круглыми или дугообразными и иметь характерный линейный размер - например длину, ширину, высоту, радиус или диаметр.
4. Краткое описание чертежей
Изобретение поясняется чертежами, где:
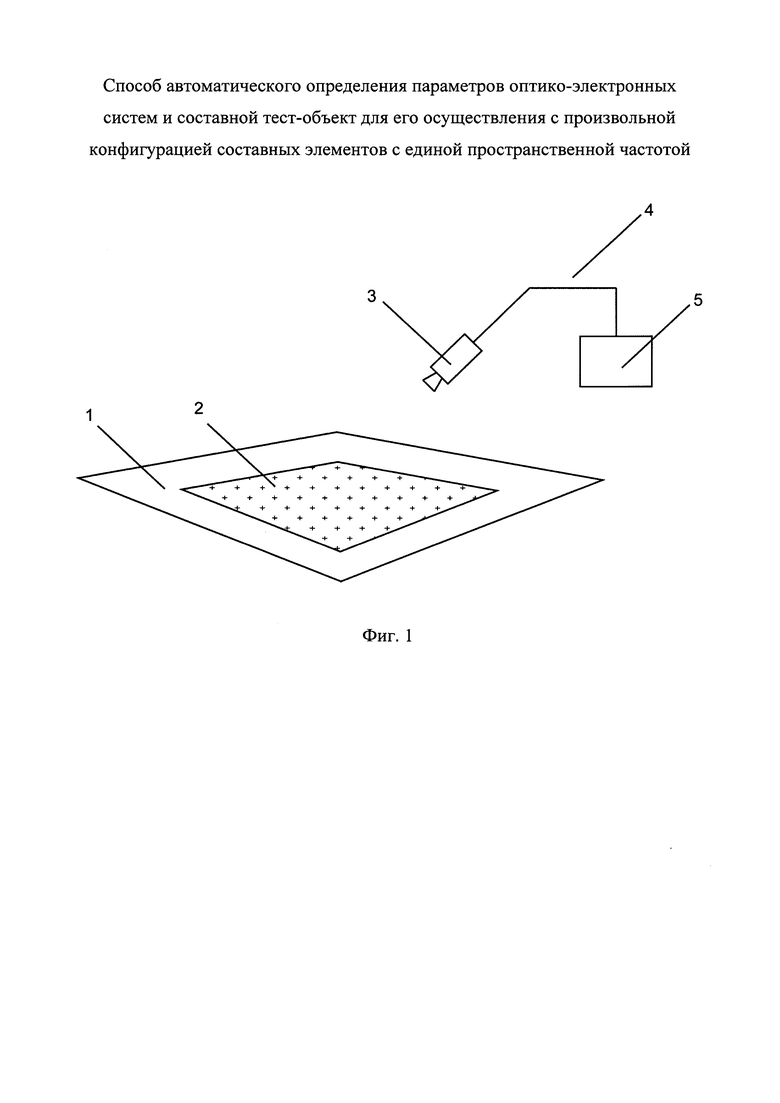
Фиг. 1. - Схема реализации определения разрешающей способности и линейного разрешения оптико-электронных систем в соответствии с предлагаемым способом.
На фигуре представлены:
1 - поверхность (мишень);
2 - тест-объект;
3 - исследуемая оптико-электронная система;
4 - линия передачи данных;
5 - электронная вычислительная машина.
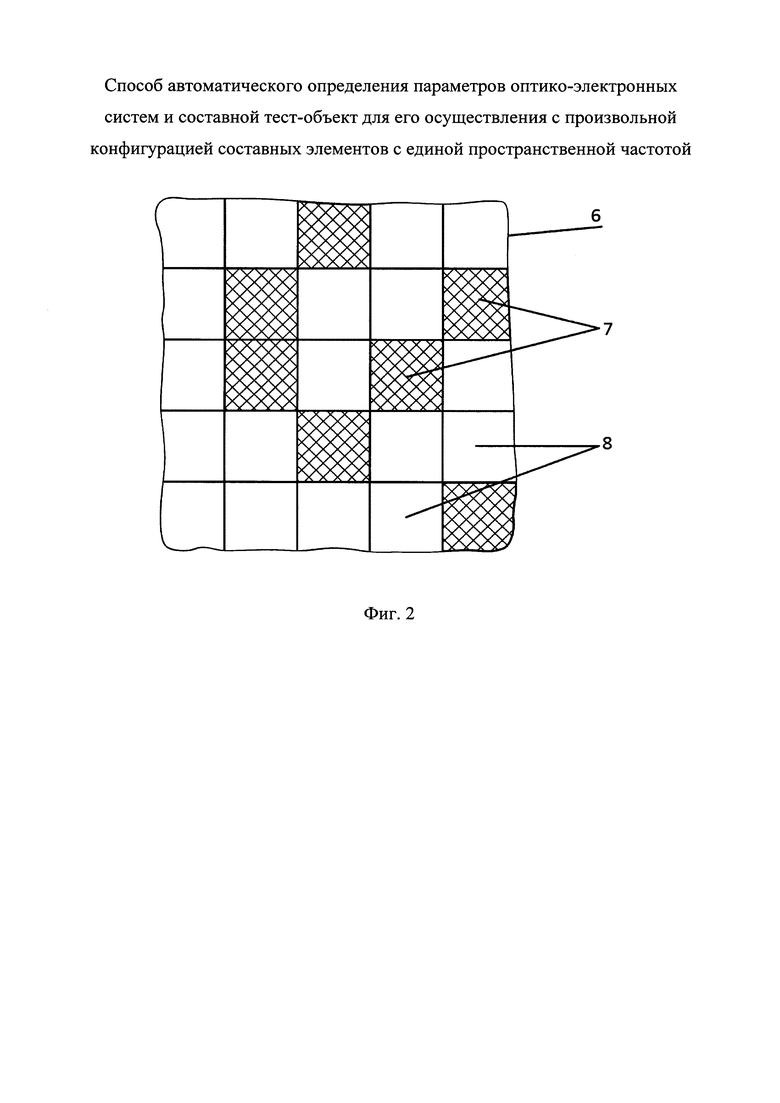
Фиг. 2. - Пример внешнего вида фрагмента тест-объекта на основе номинально квадратных модулей.
На фигуре представлены:
6 - символ тест-объекта;
7 - типовой темный (теплый) модуль;
8 - типовой светлый (холодный) модуль.
Фиг. 3. - Пример символа тест-объекта, осуществленного на основе технологии QR Code.
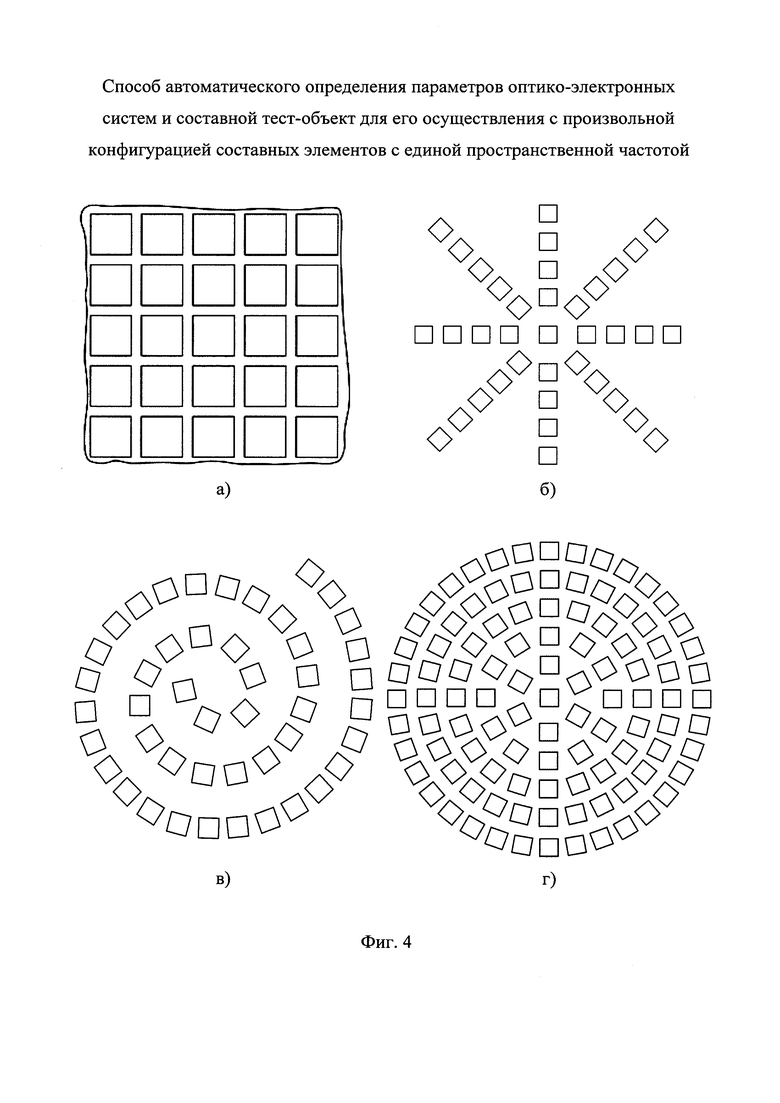
Фиг. 4. - Пример вариантов пространственной ориентации символов в тест-объекте:
а) - построчная;
б) - радиальная;
в) - спиральная;
г) - кольцевая.
5. Осуществление изобретения
Предлагаемый способ автоматического определения разрешающей способности и линейного разрешения оптико-электронных систем и тест-объект для его осуществления могут быть осуществлены различными способами, например следующим.
Возможный вариант тестового стенда, предназначенного для осуществления предлагаемого способа, представлен на фиг. 1. При осуществлении предлагаемого способа на поверхности 1 размещают тест-объект 2. После чего выполняют съемку указанного тест-объекта с помощью тестируемой ОЭС 3. Полученные в ходе съемки изображения передаются в виде сигналов по линии передачи данных 4 в электронную вычислительную машину 5.
Причем указанный тест-объект, пример которого представлен на фиг. 2, представляет собой символ или группу символов 6, выполненных в виде двухмерной регулярной структуры из однотипных темных (теплых) 7 и светлых (холодных) 8 модулей, линейные размеры которых характеризуют пространственную частоту (период) тест-объектов, а количество, состав и пространственное расположение упомянутых модулей кодирует в двоичном (бинарном) формате цифровой код, значение которого заранее известно.
Далее, с помощью указанной электронной вычислительной машины в интерактивном (путем взаимодействия с оператором) или автоматическом режимах выполняют операцию обработки и анализа изображений, полученных от тестируемой ОЭС. В ходе выполнения данной операции из совокупности изображений, полученных от тестируемой ОЭС, отбирают изображения, содержащие тест-объект, после чего на отобранных изображениях выделяют области (фрагменты), непосредственно занятые тест-объектом. Полученные области используются для дальнейшей обработки, связанной с декодированием цифровых данных, закодированных в бинарной структуре символа или символов тест-объекта.
После выполнения операции декодирования полученное одно или несколько (в зависимости от числа и особенностей символов на тест-объекте) декодированных значений сравниваются с заранее известными цифровыми значениями, закодированными в символах тест-объекта. В том случае, если декодированное значение полностью совпадает с заранее заданным, операцию декодирования считают успешной, если же совпадение не зафиксировано, делают вывод о возникновении ошибки.
Упомянутая операция декодирования выполняется независимо для каждой из выделенных областей. При этом в одном или нескольких тест-объектах в одной или нескольких зонах кадра должен встретиться один или несколько символов, при дешифрировании которых обнаруживается ошибка, свидетельствующая о невозможности их считывания и/или декодирования, что указывает на то, что данные символы тест-объектов в данных зонах кадра находятся за пределом разрешения исследуемой ОЭС.
Локальные (в зонах кадра) и интегральное (по всему полю кадра) значения PC и ЛР исследуемой ОЭС определяют путем выбора наименьших по площади (наибольших по значению пространственной частоты) успешно дешифрированных символов в интересующих зонах кадра, декодированная информация с которых соотносится со сведениями, характеризующими пространственную частоту (период) тест-объекта в данных зонах кадра.
Тест-объекты, используемые в предложенном способе, представляют собой символы или группы символов, при этом информация в символах кодируется геометрической формой, размерами, количеством и взаимным расположением темных (теплых) и светлых (холодных) модулей в двоичном (бинарном) формате.
Описанные тест-объекты могут быть осуществлены на основе технологий QR code, Aztec Code, Data Matrix, Maxi Code, ShotCode или других аналогичных технологий таким образом, что модули символов тест-объектов могут быть структурированы, например, в квадратную или круговую матрицу, быть, например, номинально квадратными, треугольными, круглыми или дугообразными и иметь характерный линейный размер - например длину, ширину, высоту, радиус или диаметр.
Для изготовления темных (теплых) и светлых (холодных) модулей символов тест-объектов могут использоваться однородные поверхности или покрытия, выполненные из материалов с низким (0,01…0,3) и высоким (0,7…0,99) коэффициентами отражения излучения в требуемой области спектра электромагнитного излучения (ультрафиолетовой и/или видимой и/или инфракрасной) соответственно.
Символы тест-объектов при формировании могут быть инвертированы пространственно и/или радиометрически (по коэффициенту отражения излучения), а также повернуты на произвольный угол в плоскости тест-объектов.
Группы символов могут иметь любую конфигурацию расположения (размещения) в плоскости тест-объектов, например построчную, радиальную, спиральную, кольцевую.
В качестве примера осуществления тест-объектов рассмотрим тест-объект, формируемый на основе символики QR (Quick Response) code в соответствии с ГОСТ Р ИСО/МЭК 18004-2015, представленный на фиг. 3.
Существует несколько версий символики QR code, отличающихся помехоустойчивостью кодирования и емкостью кодируемой информации. При использовании в качестве символа тест-объекта для определения PC и ЛР ОЭС целесообразно выбрать ту версию, которая обеспечивает только обнаружение ошибок декодирования символа без возможности исправления (причины такого выбора поясняются ниже). Этому условию удовлетворяет версия символа, представляющая собой матричную регулярную структуру из 11×11 номинально квадратных темных (теплых) и светлых (холодных) модулей фиксированного контраста; линейные размеры модулей при этом характеризуют пространственную частоту (период) символа.
Целесообразность использования версии символов без исправления ошибок в области кодирования обусловлена тем, что коды Рида-Соломона (КРС), доступные для исправления ошибок в символике QR code, являются фактором, снижающим точность при определении PC и ЛР ОЭС. Данные коды позволяют восстанавливать информацию, закодированную в символе с контролируемым уровнем избыточности от 7 до 30%. На практике это означает, что даже если часть (7…30%) модулей такого символа не разрешается исследуемой ОЭС, то информацию все равно удастся дешифрировать, что привнесет в процесс расчета дополнительную ошибку, равную значению уровня избыточности.
КРС широко применяются также в других символиках, например в Aztec Code, где в отличие от QR Code минимальный уровень избыточности и, следовательно, относительной методической погрешности составляет 5%, что можно считать приемлемым для инженерных расчетов.
Помимо КРС в символике QR code для исправления ошибок в области информации о формате применяются коды Боуза-Чоудхури-Хоквингема, являющиеся обобщением КРС. Их наличие не нарушает объективности подхода в целом, поскольку расстояние Хемминга, являющееся фиксированным для данных кодов, дает возможность исправить до трех ошибочно считанных битов. При этом ошибка считывания может быть вызвана ограничениями алгоритма декодирования или техническими характеристиками ОЭС. В обоих случаях три ошибочно считанных и впоследствии исправленных бита эквивалентны трем нераспознанным (неразрешенным) модулям символа тест-объекта, которые в процессе дешифрирования были распознаны (т.е. считаются разрешенными).
Полагая, что успешность декодирования символа определяется различимостью всех составляющих его модулей, возможно определить величину относительной методической погрешности способа определения PC и ЛР ОЭС с помощью тест-объектов на основе символики QR code:
 .
.
Таким образом, по сравнению с другими методами определения PC и ЛР ОЭС предлагаемый способ при использовании совместно с тест-объектом на основе символики QR code методически более точен.
В рассматриваемом примере символа QR code, представленном на фиг. 3, применяется числовое (цифрами от 0 до 9) кодирование информации максимальной размерностью 5 знаков, т.е. в диапазоне от 0 до 99999. В таком случае в символе тест-объекта целесообразно кодировать его порядковый номер или числовое значение пространственной частоты (периода), причем возможна реализация кодирования десятичных значений несмотря на целочисленное представление информации.
Особенностью предлагаемого изобретения является то, что тест-объект может представлять собой как единичный символ, подобный описанному в приведенном выше примере, так и группу подобных символов. В последнем случае символы, составляющие указанную группу, выступающую в виде тест-объекта, могут быть произвольно размещены в плоскости тест-объектов, как показано на фиг. 4, и иметь, например, построчную (фиг. 4а), радиальную (фиг. 4б), спиральную (фиг. 4в) или кольцевую (фиг. 4г) конфигурацию расположения (размещения).

Изобретение относится к области оптического приборостроения и касается способа определения разрешающей способности и линейного разрешения оптико-электронных систем. Способ включает в себя съемку тест-объектов с помощью оптико-электронной системы, анализ и обработку изображений. В качестве тест-объектов используются символы, представляющие собой двухмерную регулярную структуру из темных и светлых модулей, линейные размеры которых характеризуют пространственную частоту тест-объектов, информация о которой кодируется структурой символов в двоичном формате. Анализ и обработка изображений заключается в выборе фрагментов, в которых содержатся символы тест-объектов, и последующей дешифровке информации, закодированной в символах тест-объектов. Далее выбирается наименьший по площади успешно дешифрованный символ, декодированная информация с которого соотносится со сведениями, характеризующими пространственную частоту тест-объекта, по значению которой рассчитываются локальные и/или интегральные значения разрешающей способности и линейного разрешения. Технический результат заключается в повышении точности и обеспечении возможности автоматизации процесса измерений. 2 н. и 7 з.п. ф-лы, 4 ил.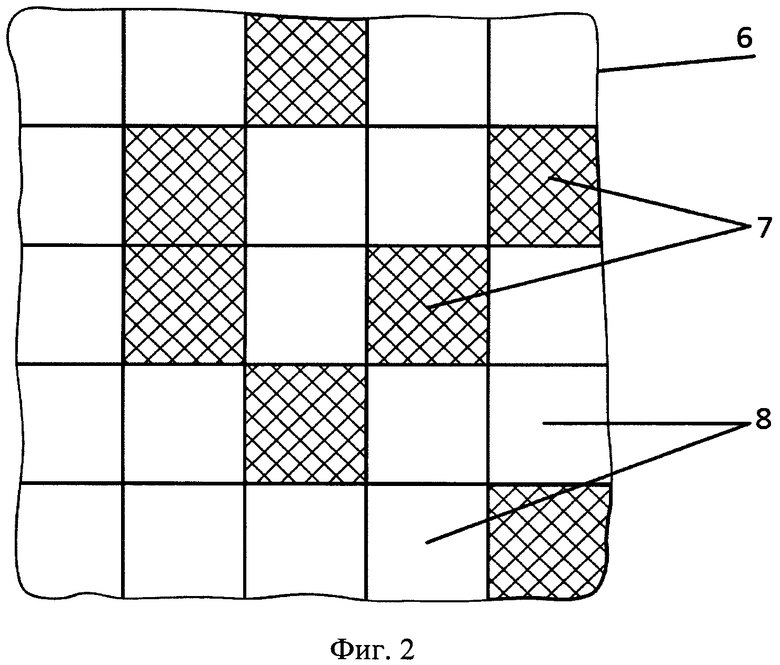
1. Способ определения разрешающей способности и линейного разрешения оптико-электронных систем, включающий размещение на поверхности (мишени) тест-объектов, выполнение съемки тест-объектов с помощью оптико-электронной системы, осуществление анализа и обработки изображений, получаемых в результате съемки тест-объектов, и определение значений разрешающей способности и линейного разрешения оптико-электронной системы по результатам обработки упомянутых изображений, проводимые в электронной вычислительной машине, отличающийся тем, что в качестве тест-объектов используются символы или группы символов, представляющие(-их) собой двухмерную регулярную структуру из темных (теплых) и светлых (холодных) модулей, линейные размеры которых характеризуют пространственную частоту (период) тест-объектов, информация о которой(-ом) кодируется структурой символов в двоичном (бинарном) формате, символы в группе имеют единую пространственную частоту (период) и могут иметь любую конфигурацию размещения в плоскости тест-объектов, например построчную, радиальную, спиральную, кольцевую, при съемке тест-объектов значение ракурса съемки (углов места и азимута между визирной осью оптико-электронной системы и нормалью к плоскости тест-объекта) может изменяться, а углы поворота оптико-электронной системы вокруг визирной оси и тест-объекта вокруг нормали могут быть произвольными, что изображения тест-объектов, получаемые в результате съемки, проходят анализ и обработку, заключающиеся в выборе из каждого изображения фрагментов, в которых содержатся символы тест-объектов, и последующем процессе дешифрирования путем считывания и декодирования информации, закодированной в символах тест-объектов, изображенных на выбранных фрагментах, и характеризующей пространственную частоту (период) тест-объектов, при этом в одном или нескольких тест-объектах в одной или нескольких зонах кадра должен встретиться один или несколько символов, при дешифрировании которых обнаруживается ошибка, свидетельствующая о невозможности их считывания и/или декодирования и указывающая на то, что данные символы тест-объектов в данных зонах кадра находятся за пределом разрешения оптико-электронной системы, после чего на основании анализа и обработки других изображений тест-объектов, полученных в результате съемки, осуществляется выбор наименьших по площади (наибольших по значению пространственной частоты) успешно дешифрированных символов в интересующих зонах кадра, декодированная информация с которых соотносится со сведениями, характеризующими пространственную частоту (период) тест-объекта в данных зонах кадра, по значению которой(-ого) рассчитываются локальные (в зонах кадра) и/или интегральное (по всему полю кадра) значения разрешающей способности и линейного разрешения оптико-электронной системы.
2. Способ по п. 1, отличающийся тем, что в качестве тест-объектов используются символы или группы символов, при этом информация в символах кодируется геометрической формой, размерами, количеством и взаимным расположением темных (теплых) и светлых (холодных) модулей в двоичном (бинарном) формате на основе технологий QR code, Aztec Code, Data Matrix, Maxi Code, ShotCode или других аналогичных технологий таким образом, что модули могут быть структурированы, например, в квадратную или круговую матрицу, быть, например, номинально квадратными, треугольными, круглыми или дугообразными и иметь характерный линейный размер - например длину, ширину, высоту, радиус или диаметр.
3. Способ по п. 1, отличающийся тем, что значение расстояния (дальности) съемки dn n-го тест-объекта заносится в память электронной вычислительной машины до начала анализа и обработки или вычисляется при дешифрировании изображения символа n-го тест-объекта из соотношения  , где Ln - характерный линейный размер модулей символа(-ов) n-го тест-объекта, а - линейный размер сенселя матричного фотоприемного устройства оптико-электронной системы,
, где Ln - характерный линейный размер модулей символа(-ов) n-го тест-объекта, а - линейный размер сенселя матричного фотоприемного устройства оптико-электронной системы,  - фокусное расстояние объектива оптико-электронной системы при съемке n-го тест-объекта.
- фокусное расстояние объектива оптико-электронной системы при съемке n-го тест-объекта.
4. Способ по п. 1, отличающийся тем, что характерный линейный размер Ln модулей символа(-ов) n-го тест-объекта изменяется с шагом дискретизации (1+q), то есть Ln=Ln-1⋅(1+q), q>0,  , в диапазоне, заданном исходя из априорно известных или предполагаемых технических характеристик оптико-электронной системы (частоты Найквиста, линейного размера сенселя матричного фотоприемного устройства, относительного отверстия объектива), при этом значение приращения q шага дискретизации выбирается (задается) исходя из требуемой точности определения значений разрешающей способности и линейного разрешения оптико-электронной системы.
, в диапазоне, заданном исходя из априорно известных или предполагаемых технических характеристик оптико-электронной системы (частоты Найквиста, линейного размера сенселя матричного фотоприемного устройства, относительного отверстия объектива), при этом значение приращения q шага дискретизации выбирается (задается) исходя из требуемой точности определения значений разрешающей способности и линейного разрешения оптико-электронной системы.
5. Тест-объект для определения разрешающей способности и линейного разрешения оптико-электронной системы в ультрафиолетовой и/или видимой и/или инфракрасной областях электромагнитного спектра, размещаемый на поверхности (мишени) и отличающийся тем, что является символом или группой символов, представляющим(-их) собой двухмерную регулярную структуру из темных (теплых) и светлых (холодных) модулей фиксированного контраста, линейные размеры которых характеризуют пространственную частоту (период) тест-объекта, информация о которой(-ом) кодируется структурой символа(-ов) в двоичном (бинарном) формате, символы в группе имеют единую пространственную частоту (период) и могут иметь любую конфигурацию размещения в плоскости тест-объекта, например построчную, радиальную, спиральную, кольцевую, символ(ы) тест-объекта может(-гут) быть повернут(ы) на произвольный угол в плоскости тест-объекта, для изготовления темных (теплых) модулей символа(-ов) тест-объекта используются однородные поверхность или покрытие, выполненные из материалов с низким коэффициентом отражения излучения в требуемых областях электромагнитного спектра (ультрафиолетовой и/или видимой и/или инфракрасной), а для изготовления светлых (холодных) модулей символа(-ов) тест-объекта используются однородные поверхность или покрытие, выполненные из материалов с высоким коэффициентом отражения излучения в требуемых областях электромагнитного спектра (ультрафиолетовой и/или видимой и/или инфракрасной).
6. Тест-объект по п. 5, отличающийся тем, что представляет собой символ или группу символов, при этом информация в символах кодируется геометрической формой, размерами, количеством и взаимным расположением темных (теплых) и светлых (холодных) модулей в двоичном (бинарном) формате на основе технологий QR code, Aztec Code, Data Matrix, Maxi Code, ShotCode или других аналогичных технологий таким образом, что модули могут быть структурированы, например, в квадратную или круговую матрицу, быть, например, номинально квадратными, треугольными, круглыми или дугообразными и иметь характерный линейный размер - например длину, ширину, высоту, радиус или диаметр.
7. Тест-объект по п. 5, отличающийся тем, что характерный линейный размер Lбаз модулей наименьшего(-их) по площади (наибольшего(-их) по значению пространственной частоты) используемого(-ых) символа(-ов) тест-объекта определяется соотношением  , где а - линейный размер сенселя матричного фотоприемного устройства оптико-электронной системы, d - расстояние (дальность) съемки,
, где а - линейный размер сенселя матричного фотоприемного устройства оптико-электронной системы, d - расстояние (дальность) съемки,  - фокусное расстояние объектива оптико-электронной системы, k - коэффициент, k≥1,
- фокусное расстояние объектива оптико-электронной системы, k - коэффициент, k≥1,  .
.
8. Тест-объект по п. 5, отличающийся тем, что характерный линейный размер Ln модулей символа(-ов) n-го тест-объекта изменяется с шагом дискретизации (1+q), то есть Ln=Ln-1⋅(1+q), q>0,  .
.
9. Тест-объект по п. 5, отличающийся тем, что материалы, используемые для изготовления темных (теплых) модулей символа(-ов) тест-объекта, обладают коэффициентом отражения электромагнитного излучения, номинальные значения которого находятся в диапазоне 0,01…0,3, а материалы, используемые для изготовления светлых (холодных) модулей символа(-ов) тест-объекта, обладают коэффициентом отражения электромагнитного излучения, номинальные значения которого находятся в диапазоне 0,7…0,99.
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ АВИАЦИОННЫХ ОПТИКО- ЭЛЕКТРОННЫХ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ В ВИДИМОМ И ИНФРАКРАСНОМ ДИАПАЗОНАХ ВОЛН И УНИВЕРСАЛЬНАЯ ПАССИВНАЯ МИРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2293960C9 |
| УНИВЕРСАЛЬНЫЙ КУЛЬТИВАТОР | 0 |
|
SU170232A1 |
| US 6992696 B1, 31.01.2006 | |||
| US 5567937 A1, 22.10.1996. | |||

