Изобретение относится к способам оценки качества оптико-электронных систем дистанционного зондирования путем измерения разрешения на местности, обеспечиваемого этими системами.
Известен способ по ГОСТ 2819-84, сущность которого состоит в том, что с помощью резольвометра и резовольметрической миры получают изображение миры на фотоматериале. Полученное изображение анализирует специалист-дешифровщик с помощью микроскопа, рассматривая группы штрихов последовательно по мере возрастания частоты и определяет номер той группы, после которой штрихи уже не разрешаются не менее чем в двух группах. Считают предельно разрешенной ту наивысшую по частоте группу штрихов миры в фотографическом изображении, в которой еще можно отчетливо сосчитать полное число штрихов.
Недостаток этого способа в том, что полученная величина разрешающей способности сильно зависит от квалификации дешифровщика и поэтому она будет в какой-то мере субъективной.
Для оценки разрешающей способности изображений, получаемых в процессе дистанционного зондирования земли, также находит применение изложенный выше способ, но в этом случае на местности размещают штриховую миру и, пролетая над ней, получают изображение, которое затем анализирует дешифровщик. (Мельканович А. Ф. , Минеев В.В. Способ определения разрешающей способности аэрофотонегатива. - В сб. Качество аэрофотоизображения. - Л.: Изд. географ. общ-ва СССР, 1969, с. 47). Зная априорно размеры миры на местности и номер группы штрихов, еще визуально (с помощью лупы) различаемых на изображении, делают вывод о полученной для данной высоты разрешающей способности на местности.
Недостаток этого способа тоже заключается в сильном влиянии субъективного фактора.
Известен способ, позволяющий автоматизировать предложенный метод (см. статью Белоглазова И.Н. "Методика автоматизированного определения разрешающей способности оптико-электронного средства по результатам экспериментального полета". Сборник научно-методических материалов, ВВИА им. Н.Е. Жуковского, 1993 г.). Сущность его выражается в следующем. Проводят аэросъемку участка земной поверхности, на котором располагают стандартный тест-объект (штриховую миру), формируют изображение, на котором выделяют центральную часть с изображением штриховой миры. Дешифровщик визуально обнаруживает миру на изображении, затем проводится проверка углового положения миры. Если направление штрихов отклоняется более чем на 5 градусов от горизонтального или вертикального направления, то изображение из рассмотрения исключается. Затем выполняется двумерное преобразование Фурье над изображением и измеряется амплитуда первой гармоники в направлении оси X или Y (в зависимости от расположения миры на изображении) декартовой системы координат. Далее рассчитывается пороговая амплитудная характеристика оператора на основании теоретических данных, после чего, используя ее, принимается решение о видимости/невидимости данной группы штрихов миры с применением известных статистических критериев.
Недостатки описанного способа состоят в том, что: 1) задача обнаружения миры решается человеком-оператором; 2) ограничения, накладываемые на угловое положение миры в плоскости кадра, значительно сужают область применения данного способа.
Последний способ наиболее близок к предлагаемому по возможностям достижения объективной оценки разрешения на местности оптико-электронных систем дистанционного зондирования и поэтому выбран в качестве прототипа.
Цель изобретения - устранение отмеченных недостатков прототипа.
Поставленная цель достигается тем, что обнаружение миры на изображении производится автоматически с использованием преобразования Xo, а обнаружение еще различимой группы штрихов выполняется с использованием стандартной модели дешифровщика.
Перечисленные признаки, характеризующие сущность предложенного способа, не обнаружены в известных способах, что позволяет сделать вывод о соответствии предложенного способа критерию "существенные отличия".
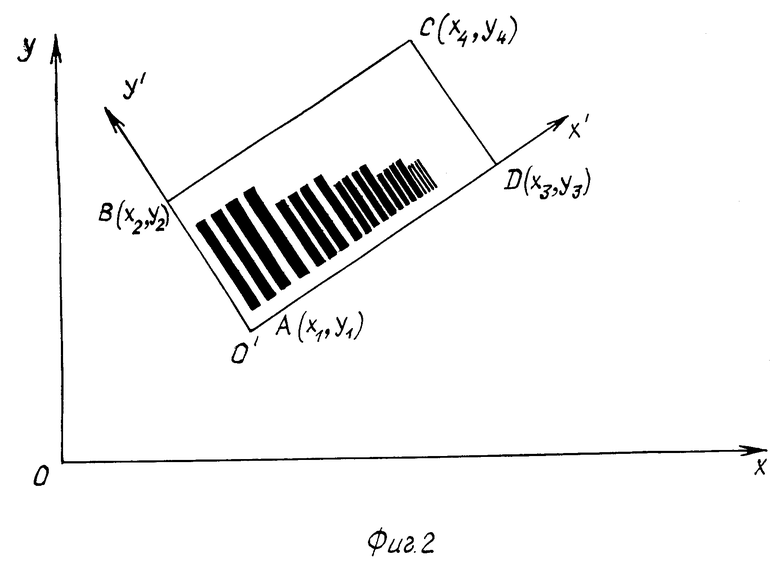
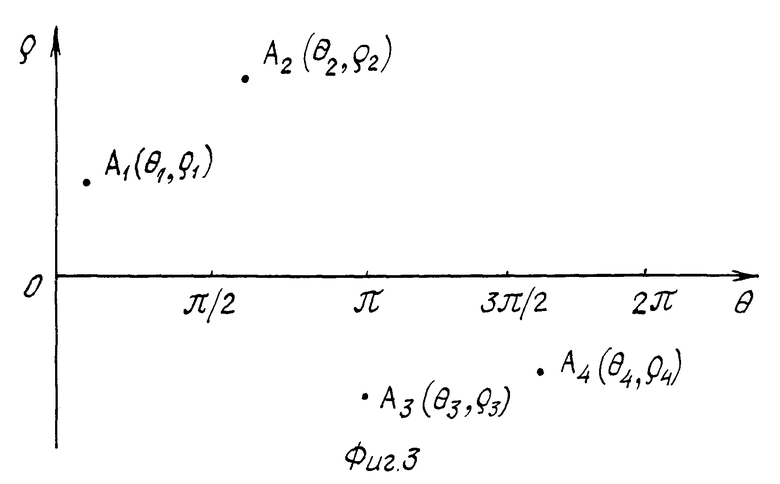
Предлагаемый способ иллюстрируют фиг. 1-3. На фиг. 1 показана последовательность выполнения операций согласно предлагаемому способу. На фиг. 2 изображено поле тест-объекта в собственной системе координат X'O'Y', которая связана с системой координат кадра XOY. На фиг. 3 представлена плоскость параметров Xo с выделенными на ней максимумами, которые соответствуют сторонами поля миры.
Предлагаемый способ предполагает следующую процедуру определения разрешения на местности оптико-электронной системы дистанционного зондирования по изображению штриховой миры.
В плоскости кадра выделяется центральная часть (представляющая не более 10% от площади всего кадра), как менее всего подверженная геометрическим искажениям, и над ней выполняется преобразование Xo (ПХ). Процедура вычисления ПХ состоит в следующем:
1. Производится выбор частоты дискретизации плоскости параметров по координатам θ и ρ. Кроме того, задается пороговое значение перепада яркости Δ для вычисления ПХ.
2. Перебор координат x и y исходного изображения и проверка выхода их за рабочий диапазон. Если перебор значений координат x и y закончен, то работа алгоритма прекращается.
3. Для текущей точки изображения вычисляются величина E (x,y) и направление G(x, y) градиента с использованием оператора Собеля размером 3х3 пиксела.
4. Если E(x,y) < Δ Lпор, то данная точка игнорируется и происходит переход к следующей точке (шаг 8 алгоритма); в противном случае рассмотрение продолжается.
5. Вычисление параметра ρ:ρ = xcosθ+ysinθ.
6. Величина перепада E (x,y) пересылается в точку плоскости параметров с координатами (G(x,y)), т.е.:
H[G(x,y),ρ]: = H[G(x,y),ρ]+E(x,y). (1)
7. Повторяются п.п. 5 и 6 для значений угла θ из диапазона [G(x,y)-ΔG/2, G(x,y)+ΔG/2].
8. Шаги 2-7 повторяются для всех точек обрабатываемого изображения.
После выполнения пороговой обработки в плоскости параметров Xo на ней ранжированием параметров Xo выделяются локальные максимумы, из которых путем логической обработки выбирают четыре, значения координат которых (фиг. 2) соответствуют определенным условиям (эти условия приведены ниже). На основании результатов логической обработки и делается вывод о наличии/отсутствии тест-объекта на изображении. Последовательность логической обработки плоскости параметров Xo следующая:
1. Ввод значений: - τ -отношение сторон прямоугольника, на котором располагается тест-объект; - Δθ, которое равно шагу равномерной дискретизации вдоль координаты θ.
2. Установка начальных значений: θ1= 0; θ2= π; θ3= π/2; θ4= 3π/2.
3. Для значений θ1 и θ2, перебирая ρ от 0 до ρmax, формируется массив C, значениями которого есть величины ρ, соответствующие координатам θ1 и θ2, аналогично для значений θ3 и θ4 - формируется массив B с соответствующими величинами ρ.
4. Осуществляется перебор всех вариантов возможных значений массивов C и B: вычисляются для каждого варианта значения f1 и f2 согласно выражениям
5. Для каждого варианта значений f1 и f2 проверяется выполнение условий
f1= τ или f2= τ (3)
Если равенство (3) хотя бы для одного из значений (f1 или f2) соблюдено, то запоминаются координаты локальных максимумов и делается вывод, что тест-объект обнаружен. Если равенство (3) не выполняется, как для f1, так и f2, то перебор значений массивов C и B продолжается, пока не будут исчерпаны все варианты перебора.
6. При условии, что в п. 5 не найдены значения, при которых выполняется условие (3), то происходит сдвиг по оси θ на величину Δθ для значений θ1,θ2,θ3,θ4 и повторяются п. п. 3-5. Если θ1>π/2 и θ3>3π/2, то обработка плоскости параметров прекращается.
В результате логической обработки получают координаты локальных максимумов, соответствующих сторонам прямоугольника миры. Зная эти координаты, пусть это будут точки A1(ρ1,θ1), A2(ρ2,θ2),A3(ρ3,θ3),A4(ρ4,θ4), можно вычислить координаты вершин углов прямоугольника миры на изображении (фиг. 2). Для этого решаются системы уравнений для взаимно перпендикулярных прямых.
При нахождении максимумов в плоскости параметров Xo, которые соответствуют сторонам прямоугольника, учитывают следующее:
- прямые взаимно перпендикулярны, если значения соответстующих им θ отличаются на π/2;
- прямые параллельны, если значения соответствующих им θ отличаются на π.
Получив координаты углов прямоугольника миры, переходят к системе координат, связанной с мирой. При этом исходят из следующих соображений. Если найденные максимумы в плоскости параметров Xo имеют координаты, у которых ρ>0, а значения θ отличаются на π/2, то считают, что отрезки прямоугольника пересекаются в плоскости изображений, пусть это стороны AD и AB. Аналогично находят вторую точку пересечения с отрезком AD; это будет отрезок, которому в плоскости параметров Xo соответствует максимум, у которого ρ<0, а значения θ отличаются на 3π/2. Таким образом получают две точки в плоскости изображений, что позволяет перейти к системе координат, связанной с мирой (X'O'Y') (фиг. 2).
Начало системы координат переносится в точку A(x1, y1). Пересчет координат осуществляется по формулам
где ϕ определяется из соотношения 
Следует отметить, что сторона прямоугольника, которой в плоскости параметров Xo соответствует положительное ρ, и положительное значение θ, находящееся в диапазоне π/2≤θ<π, считается осью O'X' новой системы координат, связанной с прямоугольником миры.
В системе координат X'O'Y' по изображению вычисляют амплитуду Ai, полосы в каждой i-ой  группе изображения штриховой миры. По изображению определяют значение среднеквадратичного отклонения шума σ и вычисляют значения отношения сигнал/шум ОСШ Ψi для изображений каждой группы штрихов по формуле
группе изображения штриховой миры. По изображению определяют значение среднеквадратичного отклонения шума σ и вычисляют значения отношения сигнал/шум ОСШ Ψi для изображений каждой группы штрихов по формуле
где Ki - коэффициент, учитывающий число полос в группе штрихов;  площадь полосы на изображении; Ai - амплитуда полосы, которая рассчитывается по формуле: Ai = Amax(i) - Amin(i), где Amax(i) - является средней величиной максимальных значений уровня серого тона в полосе i-ой группы, а Amin(i) - является средней величиной минимальных значений уровня серого тона в промежутке возле соответствующей полосы i-ой группы.
площадь полосы на изображении; Ai - амплитуда полосы, которая рассчитывается по формуле: Ai = Amax(i) - Amin(i), где Amax(i) - является средней величиной максимальных значений уровня серого тона в полосе i-ой группы, а Amin(i) - является средней величиной минимальных значений уровня серого тона в промежутке возле соответствующей полосы i-ой группы.
Площадь полосы изображении рассчитывается с учетом масштаба M, значение которого может быть получено путем деления длины стороны прямоугольника миры на изображении на длину соответствующей стороны прямоугольника на местности. Тогда
где Δi - ширина полосы в i-ой группе на местности;
εi - длина полосы в i-ой группе на местности.
Далее задают вероятность обнаружения Pоб штрихов и последовательно подставляют полученные значения Ψi в формулу стандартной модели дешифровщика (Красильников Н. Н. Теория передачи и восприятия изображений. - М.: Радио и связь, 1986, - с. 58-64)
где  - функция Лапласа.
- функция Лапласа.
Из полученных значений Ψi выбирают Ψ
где K2 - коэффициент, учитывающий число штрихов в одной группе и площадь штриха на изображении;
εi - длина полосы на местности для выбранной i-ой группы.
Полученная ширина полосы на местности и определяет величину разрешения на местности оптико-электронной системы дистанционного зондирования.
Изобретение относится к способам оценки качества оптико-электронных систем дистанционного зондирования путем измерения разрешения на местности. Сущность способа заключается в том, что проводят аэросъемку тест-объекта (штриховой миры) и получают его изображение. На центральной части изображения выполняют преобразование Хo, проводя ранжирование сигналов, выделяя группу из четырех максимумов. Переходят к системе координат, связанной с прямоугольником миры, вычисляют амплитуду Ai штрихов в группах на изображении  и их площадь
и их площадь  . Затем вычисляют среднеквадратичное отклонение шума на изображении и вычисляют отношение сигнал/шум Φi по формуле
. Затем вычисляют среднеквадратичное отклонение шума на изображении и вычисляют отношение сигнал/шум Φi по формуле 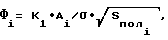 где K1 - коэффициент, учитывающий число полос в группе штрихов. Задавая вероятность обнаружения штрихов, находят значение Φ
где K1 - коэффициент, учитывающий число полос в группе штрихов. Задавая вероятность обнаружения штрихов, находят значение Φ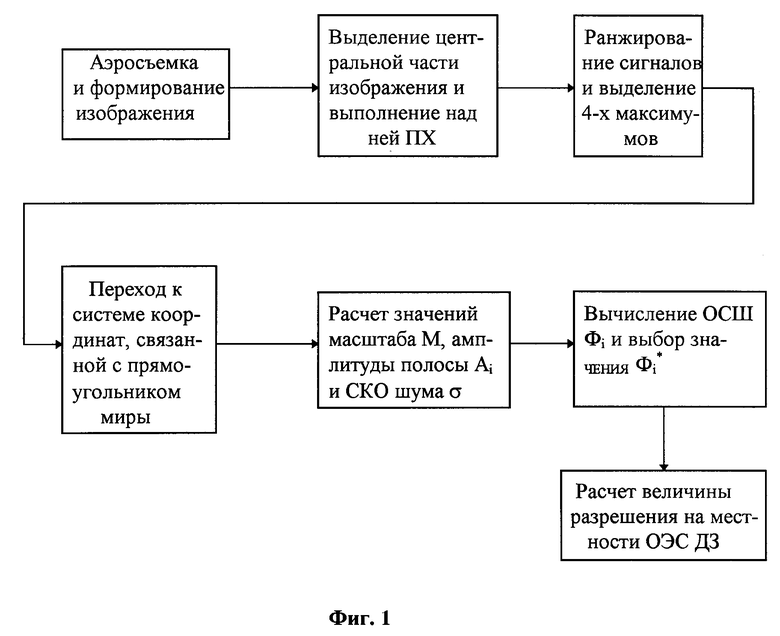
Способ измерения разрешения на местности оптико-электронной системы дистанционного зондирования, заключающийся в том, что проводят аэросъемку участка местности, на котором располагают стандартный тест-объект (штриховую миру) с числом групп n, формируют изображение, на котором выделяют центральную часть с изображением штриховой миры, отличающийся тем, что в выделенной части изображения вводится прямоугольная система координат XOY, в которой выполняют преобразование Xo, в плоскости параметров Xo путем ранжирования сигналов выделяется группа из четырех максимумов, осуществляется переход к системе координат X'O'Y', связанной с прямоугольником миры, в которой ось O'X' направлена перпендикулярно штрихам, рассчитывают величину масштаба M сформированного изображения, затем в системе координат X'O'Y' по изображению вычисляют амплитуду Ai полосы в каждой i-й  группе изображения штриховой миры и с учетом масштаба M получают площадь
группе изображения штриховой миры и с учетом масштаба M получают площадь  соответствующей полосы на изображении, определяют значение среднеквадратичного отклонения шума σ по изображению, вычисляют отношение сигнал/шум Φi для изображения каждой группы по формуле
соответствующей полосы на изображении, определяют значение среднеквадратичного отклонения шума σ по изображению, вычисляют отношение сигнал/шум Φi для изображения каждой группы по формуле
где K1 - коэффициент, учитывающий число полос в группе штрихов, далее, задавая вероятность обнаружения Pоб штрихов и последовательно подставляя в формулу
где  - функция Лапласа, полученные значения Φi, выбирают Φ
- функция Лапласа, полученные значения Φi, выбирают Φ
где K2 - коэффициент, учитывающий число штрихов в одной группе и площадь штриха на изображении в этой группе;
εi - длина полосы на местности для выбранной i-й группы,
полученная ширина полосы на местности и определяет величину разрешения на местности оптико-электронной системы дистанционного зондирования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тест-объект | 1976 |
|
SU644463A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ определения элементов внутреннего ориентирования фотограмметрической камеры | 1978 |
|
SU731289A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ определения элементов ориентирования съемочных устройств в системе координат носителя | 1975 |
|
SU534650A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТИПОВ РАСТИТЕЛЬНОСТИ | 1994 |
|
RU2115887C1 |
