Предлагаемый способ определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования относится к космической технике, а именно к обработке получаемых аппаратурой изображений, и может быть использован для определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования в условиях космического полета. При запуске космического аппарата, содержащего оптико-электронной аппаратуру дистанционного зондирования, а также в процессе эксплуатации оптико-электронной аппаратуры дистанционного зондирования геометрические параметры оптической системы, радиометрические (разброс чувствительности, нулевых уровней и отношения сигнал/шум отдельных элементов фоточувствительных матриц) могут изменяться. Это влияет на качество получаемой с помощью аппаратуры дистанционного зондирования информации. Поэтому необходимо с заданной периодичностью проводить полетную калибровку оптико-электронной аппаратуры дистанционного зондирования. В наземных условиях определение разрешающей способности проводят с помощью специального оборудования, включающего в себя большие коллиматоры и миры. В условиях полета, как правило, для определения (уточнения) разрешающей способности, используют специально созданные полигоны, представляющие собой выровненные площадки, на которых расположены линейные и радиальные миры различных размеров. Эти полигоны требуют постоянного технического обслуживания для поддержания оптических характеристик (яркости и контраста) в стабильном состоянии.
За аналог может быть принят способ определения разрешающей способности, приведенный журнале GEOMATICS №2 2013 в статье «Космический контролер чрезвычайных ситуаций «Канопус-В» подтверждает заявленные характеристики».
Недостатком данного способа является то, что для калибровки используют наземные полигоны, которые требуется поддерживать в рабочем состоянии, т.е. обеспечивать стабильность их геометрических и отражательных характеристик. Другим недостатком использования наземных полигонов для полетной калибровки является зависимость возможности проведения полетной калибровки от метеоусловий (прозрачности атмосферы, наличия облачности). Кроме того, создание таких полигонов и поддержание их в рабочем состоянии требует определенных материальных затрат.
За аналог можно принять способ определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования описанный в патенте RU 2144654. В данном способе производится съемка местности, на которой располагают стандартный тест-объект (штриховую миру), в результате съемки формируют изображение. По полученным изображениям мир выделяют группы мир, опознаваемые оператором с заданной вероятностью, затем по известным характеристикам этих мир, производится расчет разрешающей способности аппаратуры дистанционного зондирования. Данному способу присущи те же недостатки, что описаны у предыдущего аналога.
За прототип способа определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования предлагается принять способ, описанный в патенте RU 2673501, основанный на сканировании подстилающей поверхности для формирования цифрового изображения объектов на фоточувстительных матрицах и последующей его обработки. В данном способе с помощью оптико-электронной аппаратуры производится съемка поверхности с расположенными на ней мишенями (тестовыми объектами). Затем производится анализ и обработка полученных изображений в электронно-вычислительной машине. В результате обработки получают значение разрешающей способности. При применении данного способа в лабораторных условиях результат может быть оперативно и с заданной точностью. Однако при масштабировании способа для работы с орбиты КА, возникают те же проблемы, что описаны выше для аналога: влияние и нестабильность атмосферы, необходимость обслуживания мишенной позиции для поддержания ее в стабильном состоянии.
Задачей настоящего изобретения является создание способа определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования в условиях всего космического полета вне зависимости от метеоусловий и состояния наземных полигонов, а также контроля изменения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования в течение космического полета под воздействием различных факторов (глубокий вакуум, радиационное облучение, температурные деформации и т.п.).
Технически результат достигается тем, что в способе определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования, основанном на сканировании подстилающей поверхности для формирования цифрового изображения объектов на фоточувстительных матрицах и последующей его обработки, в отличие от известных, предварительно путем разворота космического аппарата производят наведение оптической оси на точку небесной сферы в окрестности Луны, затем выполняют программные развороты космического аппарата и сканирование поверхности Луны полем зрения оптико-электронной аппаратуры дистанционного зондирования, при котором направление смещения изображения поверхности Луны на фоточувствительных матрицах совпадает с направлением переноса зарядовых пакетов в фоточувстительных матрицах, причем тактовая частота переноса зарядовых пакетов должна быть синхронизирована с угловой скоростью программных разворотов космического аппарата, а при обработке полученного изображения, по размытию границ на изображении поверхности Луны, определяют частотно-контрастную характеристику, а по ней для заданного контраста и известных конструктивных параметров аппаратуры, определяют разрешающую способность.
Технический результат достигается за счет получения цифрового изображения заданных участков лунной поверхности с помощью оптико-электронной аппаратуры дистанционного зондирования путем наведения оптической оси аппаратуры дистанционного зондирования на точку небесной сферы в окрестности Луны с последующими программными разворотами для сканирования полем зрения аппаратуры дистанционного зондирования поверхности Луны.
Суть изобретения поясняется графическими материалами:
фиг. 1 - схема сканирования Луны оптико-электронной аппаратурой дистанционного зондирования, с помощью разворотов космического аппарата.
фиг. 2 - фрагмент изображения края диска Луны с выделенным окном для последующей обработки изображения.
фиг. 3 - график функции яркости точек изображения В(Х) для одной строки в выделенном окне.
фиг. 4 - график значений производной от функции В(Х) по dX dB(X).
фиг. 5 - график суммарной функции рассеяния FDISP(X) от края Луны для выделенного окна.
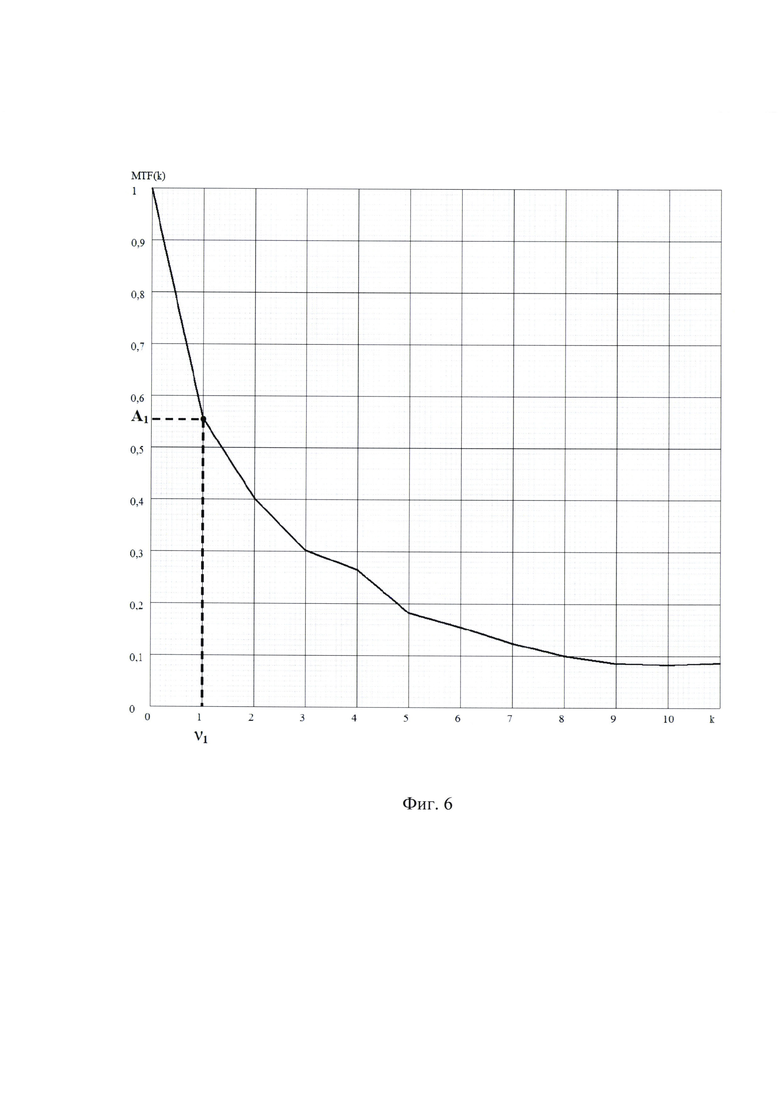
фиг. 6 - график функции передачи модуляции MTF(ν) для изображения края.
фиг. 7 - фрагмент изображения поверхности Луны (Море дождей и кратер Платон).
фиг. 8 - график функции яркости точек изображения В(Х) для строки и столбца, пересекающих изображение мелкого кратера в выделенном окне в кратере Платон.
фиг. 9 - суммарный график (Sum[dB(x)]) функции рассеяния FDISP(X) для изображения кратера в выделенном окне на фиг. 7.
фиг. 10 - график функции передачи модуляции MTF(ν) для изображения точечного объекта.
фиг. 11 - изображение кратера Платон с отмеченными размерами малых кратеров.
фиг. 12 - схема взаимного положения КА на орбите Земли и регистрируемого участка на поверхности Луны.
Способ определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования заключается в выполнении нескольких сканированиях поверхности Луны с помощью программных разворотов космического аппарата (КА), на котором установлена оптико-электронная аппаратура дистанционного зондирования. На фиг. 1 условно показан участок фокальной плоскости объектива аппаратуры дистанционного зондирования с полем зрения, в котором расположены фоточувствительные матрицы ФПЗС (фотоприборы с зарядовой связью). Сплошными и пунктирными линиями показана траектория перемещения оптической оси аппаратуры дистанционного зондирования в пространстве при разворотах КА. Запись цифрового изображения производится при движении по траектории, показанной сплошной линией. Чтобы не было смаза получаемого цифрового изображения, траектория сканирования, которая обеспечивается программными разворотами КА, должна быть перпендикулярна строкам матриц ФПЗС, а направление смещения изображения поверхности Луны в фокальной плоскости объектива оптико-электронной аппаратуры дистанционного зондирования должно совпадать с направлением переноса зарядовых пакетов в матрицах ФПЗС. Чтобы не было смаза получаемого изображения вдоль направления сканирования тактовая частота переноса зарядовых пакетов должна быть синхронизирована с угловой скоростью программных разворотов КА. Развороты КА поперек направления сканирования производятся с шагом, обеспечивающим запись изображения заданного участка поверхности Луны, например, краем и центром поля зрения объектива аппаратуры.
При сканированиях заданный район поверхности Луны последовательно попадает на разные участки поля зрения объектива оптико-электронной аппаратуры дистанционного зондирования, для оценки качества изображения по всему полю зрения. В процессе сканирования производится запись цифрового изображения, которое затем передается с помощью высокоскоростной радиолинии (ВРЛ) на наземные пункты приема и обработки информации.
Необходимость сканирования обусловлена тем, что в рассматриваемом способе используется, например, оптико-электронная аппаратура дистанционного зондирования с матрицами ФПЗС работающими в режиме с временной задержкой накопления (ВЗН). В отличие от кадровой съемки, в режиме ВЗН съемка производится строками в непрерывном режиме. Количество шагов накопления при съемке в режиме ВЗН определяется необходимым временем экспозиции. Чем ниже освещенность снимаемой поверхности, тем длительнее время экспозиции и, соответственно, больше число шагов накопления. Альбедо Луны АЛуны≈-0,073, что соответствует отражательной способности объектов на поверхности Земли таких как, лес, мокрая суглинистая почва, шоссе. Поэтому угловая скорость программных разворотов КА при сканировании Луны должна быть близкой к угловой скорости подстилающей поверхности Земли при съемке объектов на Земле ωскан≈0,01 рад/с≈32' с. То есть при сканировании полного диска Луны, угловой размер которого составляет 30÷32', один проход длится ~1 с. Луна, как для наземного наблюдателя, так и для наблюдателя с КА на орбите Земли перемещается на фоне звезд. Угловая скорость этого перемещения ωЛ≈13,2°/сут≈0,55'' с для высоты орбиты КА Норб≈720 км. Если направление сканирования будет перпендикулярно направлению собственного углового перемещения Луны, то возникает перекос изображения (т.е. квадрат отображается в виде ромба). Оценим величину перекоса β:

Как видно из формулы (1) перекос β≈1' незначителен, им можно пренебречь при сканировании Луны. В результате обработки цифрового изображения резкого края Луны получается функция передачи модуляции MTF(ν) аппаратуры дистанционного зондирования. Функция передачи модуляции эквивалентна частотно-контрастной характеристике аппаратуры дистанционного зондирования.
Процесс получения MTF(ν) с использованием резкого края изображения состоит из нескольких этапов.
Из цифрового изображения резкого края диска Луны вырезается часть изображения в форме окна высотой в несколько строк и шириной в несколько столбцов, как показано белой рамкой на фиг. 2.
Составляется массив значений яркостей точек изображения в выделенном окне.
Для каждой строки массива, соответствующей строке изображения выделенного окна, строится функция значения яркости В(х), где х соответствует расстояние от левого края выделенного окна. Строки изображения в выделенном окне, целиком попадающие на изображение поверхности Луны, либо целиком находящиеся за пределами изображения поверхности Луны, отбрасываются из дальнейших расчетов. Пример графика функции яркости точек изображения для одной строки показан на фиг. 3.
Каждая функция Bi(x) дифференцируется по dx, где i - номер строки выделенного окна. Значения полученных функций dBi(x) берутся по модулю. Функции dBi(x) являются функциями рассеяния излучения, участвующего в образовании изображения оптической системой на матрице фотоприемного устройства оптико-электронной аппаратуры дистанционного зондирования. Пример функции рассеяния для одной строки изображения края показан на фиг. 4.
Находим положение точки xi_max максимального значения dBi(x)max каждой функции dBi(x).
Находим величину смещения положения максимумов 1-й и последней функции dBi(x):

где k - номер последней выбранной строки.
Проводим сложение функций после сдвига каждой из них кроме 1-й на величину шага

по формуле

где FDISP(x) - суммарная функция рассеяния.
Пример полученной суммарной функции рассеяния от края Луны для изображения в выделенном окне показан на фиг. 5.
Функция рассеяния это физический параметр любой оптической системы, и в частности объектива аппаратуры дистанционного зондирования. Она отображает действие аберраций, дифракции и рассеяния света на качество получаемого изображения. Кроме того на качество изображения оказывает влияние и размеры элемента (пиксела) матричного приемника.
Функцию передачи модуляции MTF получают с помощью дискретного преобразования Фурье из функции рассеяния FDISP:

где N- количество измерений по ширине выделенного окна,
k - индекс пространственной частоты ν.

T - период пространственной частоты.
Действительная часть выражения (5) Re(MTF(k)) определяется как: 
а мнимая часть, как:

Амплитуда функции MTF(k) определяется как:

а фаза, как:

Нормированная по максимальному значению функция передачи модуляции MTF(k) приведена на фиг. 6.
Для аппаратуры дистанционного зондирования с матричным приемником для частоты Найквиста принимается период Т, равный двум размерам пикселя d, то есть T=2d.
В случае размера пикселя, равного 9×10-3 мм, частота Найквиста ν1 будет равна:

по графику MTF(k) на фиг. 6 определяем значение амплитуды A1≈0,555,
Это означает, что объекты, например штриховые миры с контрастом К0=1, при регистрации их аппаратурой дистанционного зондирования, имеющей характеристику MTF(k) как на фиг. 6, на частоте ν1 будут воспроизводиться на полученном изображении с контрастом K1≈0,555. Аналогично можно определить снижение контраста и для других пространственных частот.
Процесс получения MTF с использованием изображения мелких кратеров производится следующим образом. Съемка Луны должна быть выполнена при неполной фазе Луны, для получения контрастного изображения. Мелкие кратеры выбирают такие, у которых диаметр кратера разрешается не в виде кольца, а в виде светящейся точки из двух-четырех пикселей. Пример такого выбора приведен на фиг. 7. На верхней границе Моря дождей расположен кратер Платон, имеющий плоское дно. На поверхности кратера Платон имеется несколько мелких кратеров. Из цифрового изображения с кратером Платон вырезан квадрат, выделенный на фиг.7 белым контуром, в центре которого расположен мелкий кратер. Яркости точек изображения на линиях, параллельных сторонам квадрата и проходящих через кратер показаны на графиках В(х) на фиг. 8 Графики функции рассеяния FDISP(x) получены в результате дифференцирования графиков функций В(х) по dx и последующего их суммирования как показано на фиг. 9. В соответствии с выражениями 7, 8, 9 в результате дискретного преобразования Фурье из функции рассеяния получена функция передачи модуляции MTF(k). График функции передачи модуляции MTF(k) приведен на фиг. 10. По графику MTF(k) для частоты Найквиста  определяем значение амплитуды
определяем значение амплитуды  т.е. для точечных объектов с контрастом, равным 1, в полученном цифровом изображении их контраст снизится до значения 0,45.
т.е. для точечных объектов с контрастом, равным 1, в полученном цифровом изображении их контраст снизится до значения 0,45.
Оценку предельной разрешающей способности оптико-электронной аппаратуры дистанционного зондирования с участием опытного оператора проводят по изображению на экране цифрового изображения, например, кратера Платон (Platon), внутри которого на плоском дне, находятся множество более мелких кратеров. Изображение кратера Платон приведено на фиг. 11. На этом снимке указаны размеры нескольких мелких кратеров. Угловой размер этих кратеров при наблюдении с Земли (среднее расстояние 384400 км) составит в угл. сек. - 1,5, 1.3, 1,0, 0,8, 0,6, 0,5. Такие угловые значения соответствуют разрешающей способности современной оптико-электронной аппаратуры дистанционного зондирования высокого разрешения.
Линейное разрешение на местности (ЛРМ) аппаратуры дистанционного зондирования при съемке земной поверхности определяется по формуле:

где: ψ - предельное угловое разрешение аппаратуры дистанционного зондирования,
Норб - высота орбиты КА.
Высота орбиты определяется как: Норб=Rop6-R3, где Rop6 - радиус орбиты (для круговой орбиты), RЗ - средний радиус Земли.
Для вычисления углового разрешения оптико-электронной аппаратуры дистанционного зондирования по объектам на поверхности Луны необходимо иметь исходные данные: эталонное изображение поверхности Луны с высоким разрешением и с известным масштабом, подробную карту Луны с географической сеткой, положение КА на орбите Земли и положение Луны на момент съемки. Схема взаимного положения КА и Луны приведена на фиг. 12.
Визуально определяют минимальный разрешаемый объект на тестовом снимке и с помощью подробной карты Луны с масштабной сеткой, определяют линейные размеры выбранного объекта Δ [км]. Затем вычисляют угловой размер выбранного объекта при наблюдении его из точки А на орбите КА по формуле:

Далее по формуле (11) вычисляют ЛРМ.
Пример вычисления ЛРМ для оптико-электронной аппаратуры дистанционного зондирования по следующим исходным данным:
Lcp=384400 км, Δ=0,94 км.
Подстановка этих значений в формулу (12) дает значение углового размера выбранного кратера при наблюдении из точки А: ψΔ=0,52''.
Значение ЛРМ для оптико-электронной аппаратуры дистанционного зондирования, рассчитанное по формуле (11) для Норб=600 км составляет:
ЛРМ=1,51 м.
Предлагаемый в настоящей заявке способ может быть использован для определения/проверки разрешающей способности как для эксплуатируемых, так и вновь разрабатываемых систем дистанционного зондирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОПТИКО-ЭЛЕКТРОННОГО ИЗОБРАЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2024 |
|
RU2834326C1 |
| Многозональное сканирующее устройство с матричным фотоприёмным устройством | 2016 |
|
RU2654300C1 |
| Способ радиометрической коррекции скановой структуры изображения от многоэлементного фотоприёмника многозонального сканирующего устройства | 2019 |
|
RU2702849C1 |
| Способ создания цифрового топографического фотодокумента и комплексное средство для осуществления этого способа | 2017 |
|
RU2665250C2 |
| СПОСОБ ПОЛЕТНОЙ КАЛИБРОВКИ МУЛЬТИСПЕКТРАЛЬНОЙ АППАРАТУРЫ КОСМИЧЕСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2561231C1 |
| Космический комплекс дистанционного зондирования Земли высоко-детального уровня наблюдения наземных объектов | 2020 |
|
RU2753201C1 |
| Способ оценки параметров движения подвижных объектов по результатам космической зональной съемки и аппаратура космической зональной съемки космического комплекса дистанционного зондирования Земли для осуществления способа | 2018 |
|
RU2696368C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ полетной абсолютной радиометрической калибровки с использованием зондирующего сигнала | 2019 |
|
RU2729946C1 |
| СПОСОБ МОНИТОРИНГА НАДПОЧВЕННОГО ПОКРОВА ИМПАКТНЫХ РАЙОНОВ АРКТИКИ | 2016 |
|
RU2635823C1 |











Изобретение относится к космической технике для фотосъемки местности с орбиты КА и обработке изображений, получаемых с помощью оптико-электронной аппаратуры дистанционного зондирования. Способ определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования основан на сканировании подстилающей поверхности для формирования цифрового изображения объектов на фоточувстительных матрицах и последующей его обработке. Предварительно путем разворота космического аппарата производят наведение оптической оси на точку небесной сферы в окрестности Луны, затем выполняют программные развороты космического аппарата и сканирование поверхности Луны полем зрения оптико-электронной аппаратуры дистанционного зондирования, при котором направление смещения изображения поверхности Луны на фоточувствительных матрицах совпадает с направлением переноса зарядовых пакетов в фоточувстительных матрицах. Тактовая частота переноса зарядовых пакетов должна быть синхронизирована с угловой скоростью программных разворотов космического аппарата, а при обработке полученного изображения, по размытию границ на изображении поверхности Луны, определяют частотно-контрастную характеристику, и по ней для заданного контраста и известных конструктивных параметров аппаратуры, определяют разрешающую способность. Технический результат заключается в обеспечении возможности определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования в условиях всего космического полета вне зависимости от метеоусловий и состояния наземных полигонов, а также контроля изменения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования в течение космического полета под воздействием различных факторов. 12 ил.
Способ определения разрешающей способности оптико-электронной аппаратуры дистанционного зондирования, основанный на сканировании подстилающей поверхности для формирования цифрового изображения объектов на фоточувстительных матрицах и последующей его обработки, отличающийся тем, что предварительно путем разворота космического аппарата производят наведение оптической оси на точку небесной сферы в окрестности Луны, затем выполняют программные развороты космического аппарата и сканирование поверхности Луны полем зрения оптико-электронной аппаратуры дистанционного зондирования, при котором направление смещения изображения поверхности Луны на фоточувствительных матрицах совпадает с направлением переноса зарядовых пакетов в фоточувстительных матрицах, причем тактовая частота переноса зарядовых пакетов должна быть синхронизирована с угловой скоростью программных разворотов космического аппарата, а при обработке полученного изображения, по размытию границ на изображении поверхности Луны, определяют частотно-контрастную характеристику, и по ней для заданного контраста и известных конструктивных параметров аппаратуры, определяют разрешающую способность.
| Способ автоматического определения параметров оптико-электронных систем и составной тест-объект для его осуществления с произвольной конфигурацией составных элементов с единой пространственной частотой | 2017 |
|
RU2673501C1 |
| Способ автоматического определения параметров оптико-электронных систем и составной тест-объект для его осуществления с произвольной конфигурацией составных элементов с различной пространственной частотой | 2017 |
|
RU2673502C1 |
| DE 102016212477 A1, 11.01.2018 | |||
| WO 03056392 A1, 10.07.2003. | |||

