ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к физиотерапевтическим устройствам, в частности оно относится к физиотерапевтическим тренажерам, имитирующим ходьбу по лестнице, в котором эффективность лечения повышается и/или лечение документально фиксируется посредством использования компьютерной системы, сопряженной с совокупностью встроенных датчиков.
Многим пациентам по разным причинам требуется физиотерапевтическая реабилитация. В число таких пациентов входят, например, жертвы дорожно-транспортных происшествий, пациенты, которые перенесли сердечный приступ или медицинскую хирургическую процедуру на сердце, а также пациенты, которые перенесли церебральный приступ, инвазивные медицинские процедуры или получили травмы, связанные с применением насилия и т.п. Эти пациенты требуют физиотерапевтического лечения в реабилитационных отделениях различных заведений, или проводимого профессиональными физиотерапевтами, для постепенного возвращения к обычной жизни.
Тренировка ходьбы, подъема и спуска по ступеням является основной частью процесса реабилитации. Способность подниматься и спускаться по ступеням является ключевым компонентом процесса оценивания, осуществляемого медицинскими работниками при принятии решения о выписке пациента из реабилитационного заведения домой.
Один пример подходящего устройства для тренировки поднимания и опускания по лестнице описан в патенте США №5,901,813, и серийно выпускается компанией «DPE Medical Ltd.» (Израиль) под названием «Dynamic Stair Trainer» (DST). Устройство состоит из нескольких ступеней, высота которых может быть одновременно изменена в соответствии с необходимостью и возможностью пациента, проходящего в данный момент лечение.
Тренажеры с имитацией ходьбы по лестнице, используемые в физиотерапии для тренировки подъема и спуска по ступеням, предпочтительно статичны во время использования с одинаковым шагом, имитирующим вид и ощущение обычных ступеней. Также предпочтительно регулировку высоты осуществляют посредством исключительно вертикального движения без изменения глубины поверхности проступи каждой ступени, и ступени имеют закрытые поверхности подступенков без перекрывания между ступенями для уменьшения риска спотыкания до минимума.
Известные ступенчатые тренажеры этого типа не содержат встроенных инструментов для способствования анализу и оценке прогресса лечения с помощью ходьбы по лестнице.
Следовательно, существует необходимость в создании физиотерапевтического тренажера с имитацией ходьбы по лестнице, в котором эффективность лечения будет повышена и/или лечение документально зафиксировано посредством использования компьютерной системы, сопряженной с совокупностью встроенных датчиков.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой физиотерапевтический тренажер с имитацией ходьбы по лестнице, в котором эффективность лечения повышается и/или лечение документально фиксируется посредством использования компьютерной системы, сопряженной с совокупностью встроенных датчиков.
В соответствии с раскрытием варианта реализации настоящего изобретения создана система, содержащая:
(a) совокупность по меньшей мере из трех горизонтальных поверхностей проступей;
(b) приводную систему, механически соединенную с совокупностью поверхностей проступей и выполненную с возможностью вертикального смещения по меньшей мере двух из поверхностей проступей таким образом, чтобы регулировать высоту подъема между смежными поверхностями проступей так, чтобы образовывать совокупность ступеней с одинаковым шагом для диапазона различных высот подъема;
(c) совокупность датчиков, содержащий по меньшей мере один датчик, установленный для измерения параметра, относящегося к физиотерапии, осуществляемой с использованием совокупности ступеней; и
(d) компьютерную систему, содержащую по меньшей мере один процессор и энергонезависимый носитель данных, причем компьютерная система сопряжена с совокупностью датчиков для получения по меньшей мере одного параметра.
В соответствии с другим признаком варианта реализации настоящего изобретения по меньшей мере один датчик содержит датчик, установленный для измерения параметра, указывающего текущую высоту подъема между смежными поверхностями проступей.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система содержит пользовательский интерфейс, выполненный с возможностью получения входного сигнала, идентифицирующего пациента, проходящего лечение, и при этом компьютерная система хранит записи множества сеансов лечения для каждого пациента, причем записи включают текущую высоту подъема.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система выполнена с возможностью генерирования показателя возможности использования лестницы пациентом, причем показатель возможности использования лестницы указывает на текущую возможность пациента подъема по лестнице и скорость улучшения текущей возможности.
В соответствии с другим признаком варианта реализации настоящего изобретения по меньшей мере один датчик содержит по меньшей мере один датчик частоты сердечных сокращений, установленный для измерения параметра, указывающего на частоту сердечных сокращений пациента на совокупности ступеней.
В соответствии с другим признаком варианта реализации настоящего изобретения система дополнительно содержит поручень, проходящий вдоль по меньшей мере одной стороны совокупности ступеней, и при этом по меньшей мере один датчик частоты сердечных сокращений встроен в поручень.
В соответствии с другим признаком варианта реализации настоящего изобретения система дополнительно содержит поручень, проходящий вдоль по меньшей мере одной стороны совокупности ступеней, и при этом по меньшей мере один датчик содержит по меньшей мере один контактный датчик, установленный для генерирования выходного сигнала, указывающего на участок, на котором пациент, использующий совокупность ступеней, держится за поручень.
В соответствии с другим признаком варианта реализации настоящего изобретения по меньшей мере один датчик содержит по меньшей мере один датчик нагрузки, установленный для измерения нагрузки, прикладываемой к каждой из поверхностей ступеней.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система выполнена с возможностью:
(a) наблюдения за суммой нагрузок, измеряемых множеством датчиков нагрузки; и
(b) определения текущего веса пациента на совокупности ступеней.
В соответствии с другим признаком варианта реализации настоящего изобретения система дополнительно содержит поручень, проходящий вдоль по меньшей мере одной стороны совокупности ступеней, и при этом компьютерная система дополнительно выполнена с возможностью вычитания текущей суммы нагрузок из текущего веса для определения текущей нагрузки, прикладываемой пациентом к поручню.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система дополнительно выполнена с возможностью генерирования предупреждающего сигнала при превышении текущей нагрузкой, прикладываемой пациентом к поручню, заранее установленного процента текущего веса пациента.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система выполнена с возможностью обработки сигналов от датчиков нагрузки для определения по меньшей мере одного показателя управления крупной моторикой во время использования лестницы.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система выполнена с возможностью обработки сигналов от датчиков нагрузки для определения периода времени, затрачиваемого пациентом на перемещение от одной из поверхностей проступи к другой из поверхностей проступи.
В соответствии с другим признаком варианта реализации настоящего изобретения по меньшей мере один датчик нагрузки реализован как по меньшей мере два датчика нагрузки, установленных таким образом, чтобы генерировать сигналы, обеспечивающие возможность определения участка нагрузки относительно длины каждой из поверхностей проступей.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система выполнена с возможностью определения того, начал ли пациент движение с правой ноги или с левой ноги, для каждого перехода пациента от одной ступени к другой, и генерирования индикации двухстороннего или одностороннего использования.
В соответствии с другим признаком варианта реализации настоящего изобретения по меньшей мере один датчик нагрузки реализован как совокупность датчиков нагрузки, установленных таким образом, чтобы генерировать сигналы, обеспечивающие определение участка нагрузки в двух измерениях для каждой из поверхностей проступей.
В соответствии с другой характерной особенностью варианта реализации настоящего изобретения компьютерная система выполнена с возможностью генерирования предупреждающего сигнала при удовлетворении нагрузкой на поверхность ступени условиям, указывающим на чрезмерную нагрузку передней кромки поверхности проступи.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система функционально соединена с приводной системой, причем компьютерная система выполнена с возможностью извлечения данных из носителя данных или из удаленного носителя данных, относящихся по меньшей мере к одному прошлому сеансу лечения для данного пациента, причем компьютерная система выполнена с возможностью приведения приводной системы в действие для приведения совокупности ступеней к исходной высоте подъема для следующего сеанса лечения, причем исходную высоту подъема по меньшей мере частично выводят из данных.
В соответствии с другим признаком варианта реализации настоящего изобретения приводная система выполнена с возможностью смещения поверхностей проступей таким образом, чтобы образовывать совокупность ступеней с множеством высот подъема, по существу покрывающих большую часть диапазона от 0 см до 18 см.
В соответствии с другим признаком варианта реализации настоящего изобретения приводная система дополнительно выполнена с возможностью смещения поверхностей проступей таким образом, чтобы располагать все из множества поверхностей проступей рядом друг с другом с образованием непрерывной плоской поверхности.
В соответствии с другим признаком варианта реализации настоящего изобретения приводная система выполнена с возможностью смещения поверхностей проступей исключительно посредством вертикального движения, и при этом каждая из множества поверхностей проступей имеет сопряженную вертикальную поверхность подступенка.
В соответствии с другим признаком варианта реализации настоящего изобретения компьютерная система дополнительно содержит коммуникационные компоненты для соединения с проводной или беспроводной сетью, и при этом компьютерная система выполнена с возможностью передачи отчета, содержащего данные, относящиеся к сеансу лечения пациента, через сеть.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение описано в настоящем документе только в качестве примера со ссылкой на сопроводительные чертежи, на которых:
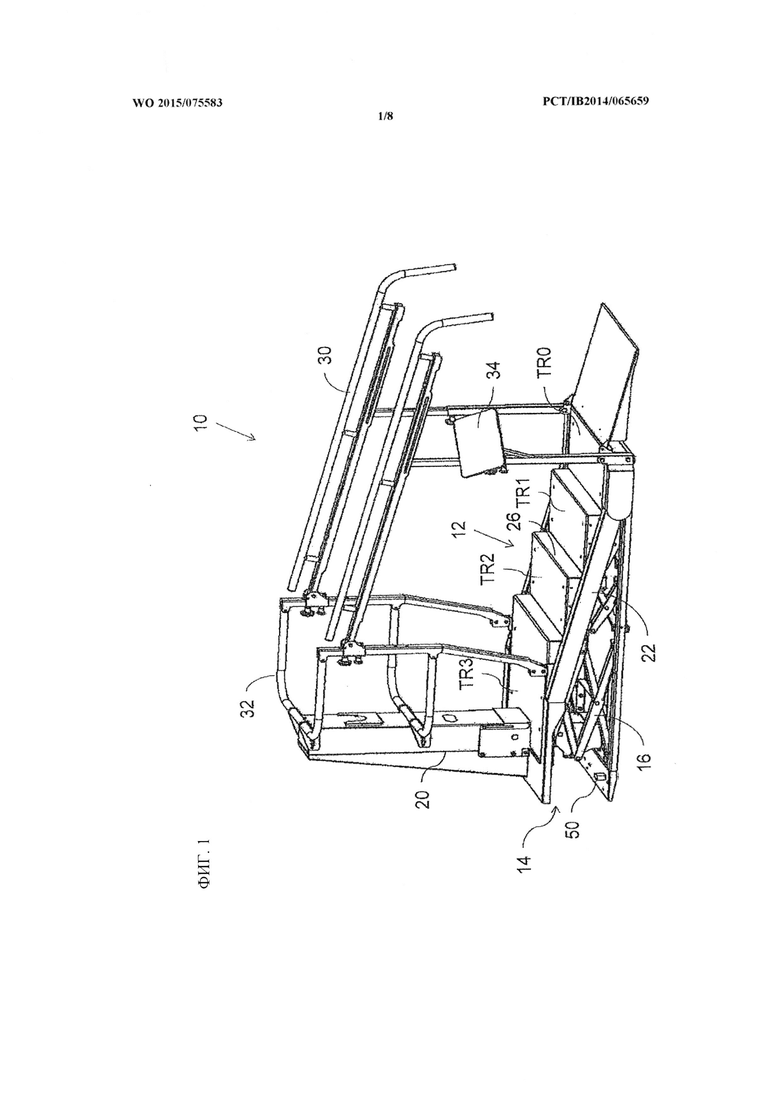
На фиг. 1 представлен изометрический вид физиотерапевтического тренажера с имитацией ходьбы по лестнице, изготовленного и функционирующего в соответствии с вариантом реализации настоящего изобретения, изображающий тренажер с установленной средней высотой подъема;
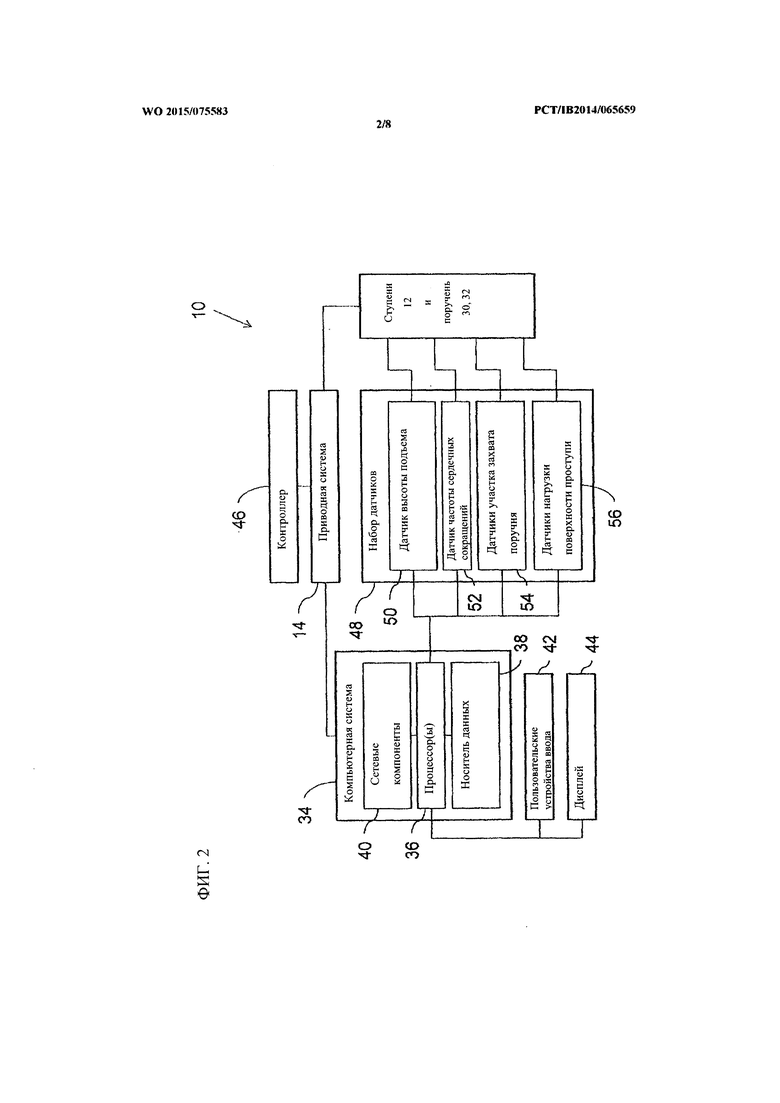
На фиг. 2 представлена блок-схема физиотерапевтического тренажера с имитацией ходьбы по лестнице, по фиг. 1;
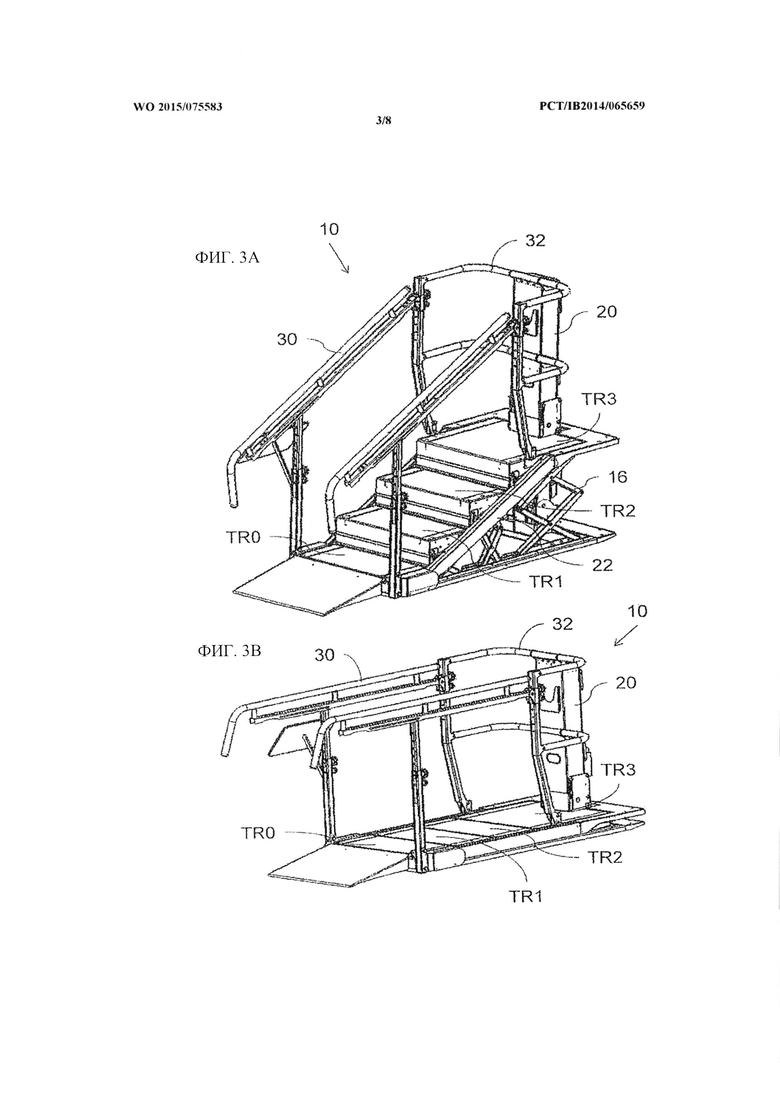
На фиг. 3А и 3B представлены изометрические виды физиотерапевтического тренажера с имитацией ходьбы по лестнице по фиг. 1, изображающие тренажер с установленной, соответственно, максимальной высотой подъема и нулевой высотой подъема, полезную для ходьбы между параллельными брусьями при амбулаторном лечении;
На фиг. 4 представлен изометрический вид сзади физиотерапевтического тренажера с имитацией ходьбы по лестнице по фиг. 1, с установленной максимальной высотой, с убранными задними крышками для отображения компонентов приводной системы;
На фиг. 5 представлен изометрический вид в увеличенном масштабе блока ступени физиотерапевтического тренажера с имитацией ходьбы по лестнице по фиг. 1;
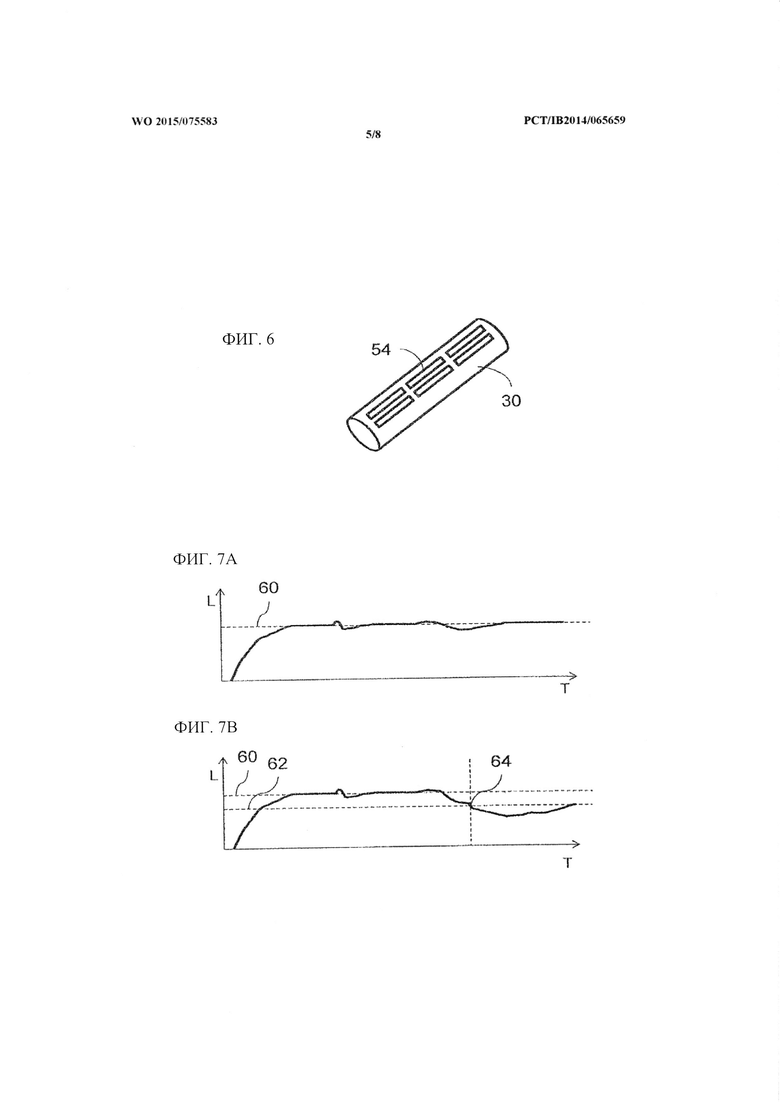
На фиг. 6 представлен схематический изометрический вид участка поручня физиотерапевтического тренажера с имитацией ходьбы по лестнице по фиг. 1, иллюстрирующий предпочтительное расположение чувствительных элементов;
На фиг. 7А и 7B представлены схематические графики, иллюстрирующие изменение общей нагрузки на физиотерапевтический тренажер с имитацией ходьбы по лестнице по фиг. 1 в зависимости от времени при нормальном использовании и в случае чрезмерной нагрузки, прикладываемой к поручню, соответственно;
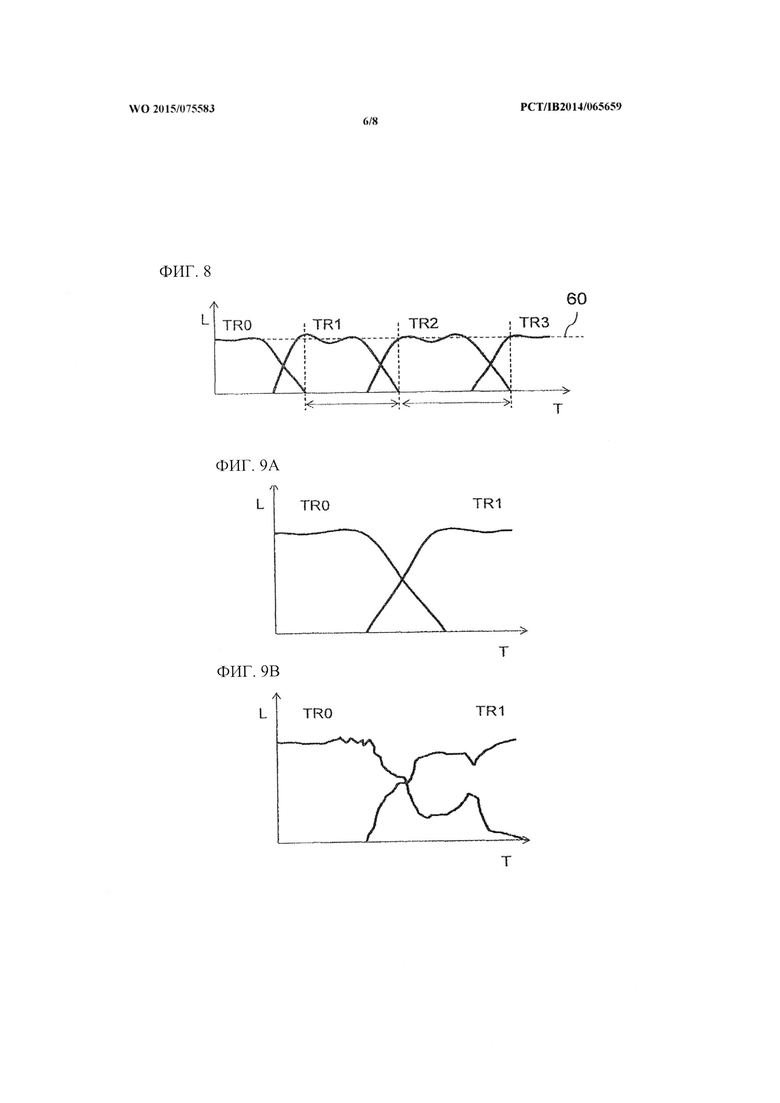
На фиг. 8 представлен схематический график, иллюстрирующий изменение нагрузки на каждую последующую поверхность проступи во время использования физиотерапевтического тренажера с имитацией ходьбы по лестнице по фиг. 1;
На фиг. 9А и 9B представлены виды в увеличенном масштабе области графика по фиг. 8 для пациентов с нормальной устойчивостью и плохой устойчивостью соответственно;
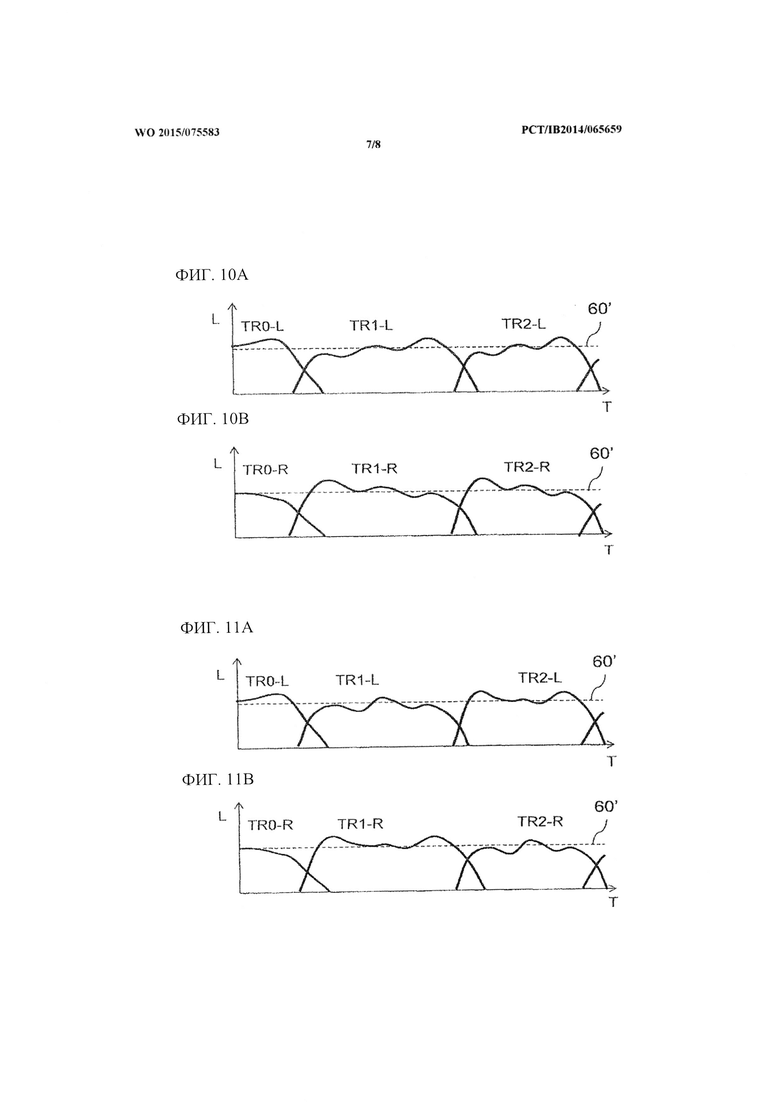
На фиг. 10А и 10B представлены схематические графики, подобные фиг. 8, но разложенные на нагрузку, прикладываемую к левой стороне и правой стороне каждой поверхности проступи соответственно, для случая, когда пациент неоднократно начинает движение с правой ноги;
На фиг. 11А и 11B представлены схематические графики, подобные фиг. 10А и 10B соответственно, для пациента, начинающего движение с любой ноги; и
На фиг. 12А и 12B представлены схематические графики, иллюстрирующие баланс нагрузки на переднюю и заднюю кромки для данной поверхности проступи при условиях нормального использования и опасного расположения ступни на краю ступени, соответственно.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой физиотерапевтический тренажер с имитацией ходьбы по лестнице, в котором эффективность лечения повышена и/или лечение документально фиксируется посредством использования компьютерной системы, сопряженной с совокупностью встроенных датчиков, и соответствующих способов управления и/или оценивания лечения с использованием такого устройства.
Принципы и функционирование тренажеров с имитацией ходьбы по лестнице в соответствии с настоящим изобретением могут быть более понятны со ссылкой на чертежи и сопроводительное описание.
Со ссылкой на чертежи, на фиг. 1-6 изображены различные полные и частичные виды физиотерапевтического тренажера с имитацией ходьбы по лестнице, в целом обозначенного цифрой 10, изготовленного и функционирующего в соответствии с наиболее предпочтительным вариантом реализации настоящего изобретения.
Механическая конструкция
Основа конструкции тренажера 10 в соответствии с этим наиболее предпочтительным примером в большой степени подобна реализации указанного ранее тренажера ((Dynamic Stair Trainer» («DST»), серийно выпускаемого компанией «DPE Medical Ltd.» (Израиль). Устройство содержит совокупность 12 по меньшей мере из трех, а в изображенном в настоящем документе случае - четырех горизонтальных поверхностей проступей, отдельно обозначенных как TR0, TR1, TR2 и TR3. Приводная система 14 механически сопряжена с совокупностью 12 поверхностей проступей и выполнена с возможностью вертикального смещения по меньшей мере двух из поверхностей TR1-TR3 проступей таким образом, чтобы регулировать высоту подъема между смежными поверхностями проступей так, чтобы образовывать совокупность 12 ступеней с одинаковым шагом для диапазона различных высот подъема.
Предпочтительный, но не ограничивающий вариант реализации приводной системы 14 лучше всего показан на фиг. 4. Под каждой поверхностью проступи расположен ножничный механизм 16, предпочтительно удвоенный для поддержки каждой стороны поверхности проступи, что обеспечивает возможность вертикального движения поверхности проступи, при этом обеспечивая параллельное расположение относительно пола. Линейный привод, изображенный в настоящем описании в виде винтового привода 18, установлен в колонне 20 в задней части верхней поверхности TR3 проступи и установлен для вертикального перемещения поверхности TR3 проступи. Также могут быть использованы другие типы приводов, такие как гидравлический или пневматический приводы. Два боковых рельса 22 шарнирно соединены с верхней поверхностью TR3 проступи таким образом, чтобы подниматься на одном конце при подъеме верхней поверхности проступи. Каждая из других поверхностей проступей содержит боковые выступы 24 (см. фиг. 5), взаимодействующие с рельсами 22 как направляющие, таким образом поднимая каждую поверхность проступи пропорционально подъему верхней поверхности и поддерживая одинаковый шаг совокупности ступеней 12.
Следует отметить, что на чертежах изображена система настоящего изобретения с убранными различными крышками и защитным ограждением для отображения различных компонентов механизма.
Для лечения при помощи ходьбы по лестнице важно, чтобы ступени являлись закрытыми ступенями, т.е., содержали закрытые поверхности подступенка, чтобы исключить цепляние пальцев ног пациента за нижнюю часть ступени. Для этого каждая поверхность ступени (кроме TR0) в целом выполнена за одно целое с поверхностью 26 подступенка с образованием конструкции ступени. Приводная система 14 предпочтительно выполнена с возможностью смещения поверхностей проступей исключительно вертикальным движением, например, посредством указанных ранее ножничных механизмов 16.
В особенно предпочтительном случае, изображенном на фиг. 5, каждая ступень также содержит участок 28 телескопического удлинения, обеспечивающий удлинение поверхности 26 подступенка в более высоко поднятых положениях системы, например, как показано на фиг. 3А. Использование участка телескопического удлинения позволяет переводить систему в полностью опущенное состояние (фиг. 3B), в котором расстояние от пола меньше, чем максимальная высота подъема совокупности 12 ступеней в полностью поднятом состоянии.
Тренажер предпочтительно также содержит по меньшей мере один поручень, проходящий вдоль совокупности 12 ступеней. В изображенном в настоящем описании варианте реализации поручень 30 с регулируемой высотой обеспечен на каждой стороне совокупности 12 ступеней и дополнен участком 32 поручня, проходящим вокруг верхней поверхности проступи, которая удлинена для образования верхней платформы для способствования повороту между подъемом и спуском. Поручень может дополнительно или альтернативно быть выполнен с возможностью регулировки в горизонтальном положении для обеспечения возможности регулирования пространства между правым и левым рельсами.
Приводная система 14 предпочтительно выполнена с возможностью смещения поверхностей проступей для образования совокупности 12 ступеней с множеством высот подъема, по существу покрывающих большую часть диапазона от 0 см до 18 см. «По существу покрывает» в этом контексте относится к возможности регулирования, которая обеспечивает непрерывное регулирование или множество отдельных положений, разнесенных друг от друга не более чем на 2 см, а более предпочтительно с шагом 1 см или меньше. В наиболее предпочтительном варианте реализации система обеспечивает регулирование для по существу покрывания всего диапазона по меньшей мере от 0 до 18 см, таким образом способствуя реализации всех обычных размеров ступеней.
Тренажер предпочтительно принимает полностью плоское (нулевой подъем) состояние, как показано на фиг. 3B. На этом этапе множество поверхностей проступей расположено рядом друг с другом с образованием непрерывной плоской поверхности, используемой для ходьбы между параллельными брусьями при амбулаторном лечении.
В дополнение к указанным ранее компонентам настоящее изобретение содержит компьютерную систему 34, содержащую по меньшей мере один процессор 36 и энергонезависимый носитель 38 данных, обычно в сочетании с сетевыми компонентами 40 для соединения с проводной или беспроводной сетью. Компьютерная система 34 может представлять собой любой тип подходящего компьютера, без ограничения включая компьютер общего назначения, исполняющий подходящее программное обеспечение на подходящей операционной системе, и специализированную компьютерную систему, сконфигурированную подходящим аппаратным обеспечением, программным обеспечением и/или предустановленным программным обеспечением для осуществления различных требуемых функций. В определенных вариантах реализации компьютерная система 34 может быть реализована с использованием портативного электронного устройства, такого как смартфон, исполняющего подходящее программное обеспечение и сообщающегося по беспроводной связи с различными другими компонентами системы.
Компьютерная система 34 предпочтительно сопряжена с одним или большим количеством пользовательских устройств 42 ввода и дисплеем 44, и. возможно, встроена в них. В одном предпочтительном случае компьютерная система 34 полностью выполнена в «планшетной» конфигурации с сенсорным экраном, который выполняет функцию устройства ввода и дисплея, как схематически показано на фиг. 1.
Управление движением приводной системы 14 вверх/вниз может осуществляться путем нажатия непосредственно на кнопки «вверх»/«вниз» на контроллере 46, сопряженном с приводной системой 14. Дополнительно или альтернативно управление приводной системой 14 может осуществляться через пользовательский интерфейс компьютерной системы 34.
Компьютерная система 34 сопряжена с совокупностью 48 датчиков, содержащим по меньшей мере один датчик, установленный для измерения параметра, относящегося к физиотерапии, осуществляемой с использованием совокупности 12 ступеней. Предпочтительные примеры датчиков и соответствующие режимы работы системы описаны далее.
Совокупность датчиков
Совокупность датчиков 48 может содержать большое разнообразие датчиков для считывания различных параметров, относящихся к физиотерапии, осуществляемой с использованием совокупности 12 ступеней. Эти параметры могут относиться к текущему состоянию самого совокупности ступеней, или к способу использования совокупности ступеней пациентом. Каждый из датчиков, описанных далее, выгодно использовать отдельно. Определенные особенно предпочтительные варианты реализации содержат несколько типов датчиков, и могут совмещать данные от различных датчиков для выведения дополнительной информации. Конкретные датчики, описанные в настоящем описании, приведены в качестве примера и их перечень не является исчерпывающим.
В определенных вариантах реализации настоящее изобретение содержит датчик 50, установленный для измерения параметра, указывающего на текущую высоту подъема между смежными поверхностями проступей. Датчик 50 может быть выполнен в различных формах, включая без ограничения: лазерный или другой дальномер, установленный для измерения расстояния между верхней платформой TR3 и основой тренажера; оптическое или магнитное кодирующее устройство, сопряженное с винтовым приводным механизмом для подсчета оборотов привода; и датчик угла поворота, сопряженный с механическим компонентом одного из ножничных механизмов. Этот выходной сигнал после исправления любой погрешности и деления на количество ступеней обеспечивает непосредственную индикацию текущего шага совокупности ступеней 12.
В определенных вариантах реализации настоящее изобретение содержит по меньшей мере один датчик 52 частоты сердечных сокращений, установленный для измерения параметра, указывающего на частоту сердечных сокращений пациента на совокупности 12 ступеней, перед, во время и/или после подъема или спуска по ступеням. В соответствии с одним предпочтительным вариантом реализации считывание частоты сердечных сокращений осуществляют посредством электродов, расположенных на поручнях 30 и/или 32, с использованием технологии, общедоступной и применимой в поручнях множества беговых дорожек и других устройств для аэробных физических упражнений. Эта технология является хорошо известной и не будет подробно описана в настоящем описании. В определенных случаях электроды для наблюдения частоты сердечных сокращений могут быть расположены только на участках поручня, соответствующих нижней ступени и верхней ступени, для считывания частоты сердечных сокращений перед и после подъема и спуска.
В соответствии с другим признаком определенных предпочтительных вариантов реализации настоящего изобретения по меньшей мере один контактный датчик 54 установлен для генерирования выходного сигнала, указывающего на участок, на котором пациент, использующий совокупность 12 ступеней, держится за поручень. Датчики участка захвата поручня обычно выполнены как несколько емкостных датчиков или кондукционных датчиков, расположенных вдоль поручня на расстоянии друг от друга, обеспечивающих определение вспомогательной схемой участка вдоль поручня, за который пользователь держится в настоящий момент, как схематически показано на фиг. 6. В частности в случае кондукционных датчиков, датчики участка захвата могут преимущественно быть выполнены за одно целое со считыванием частоты сердечных сокращений через общие проводящие электроды.
В соответствии с другим признаком определенных предпочтительных вариантов реализации настоящего изобретения по меньшей мере один датчик 56 нагрузки установлен для измерения нагрузки, прикладываемой к каждой из поверхностей проступей. В особенно предпочтительном примере по фиг. 5 верхняя пластина каждой поверхности проступи поддерживается четырьмя датчиками нагрузки, по одному в каждом углу, что обеспечивает устойчивость и позволяет осуществлять подробный анализ распределения веса по поверхности проступи в реальном времени. Подобные конструкции известны в области техники детских игр, и описаны в документах, таких как, например, в патенте США №8100770, выданном Ямазаки и др. (Yamazaki et al.).
Функционирование
Различные датчики совокупности датчиков 48 в сочетании с компьютерной системой 34 обеспечивают разнообразие функциональности для записи сеансов лечения, повышения эффективности и/или обеспечения более безопасного лечения, и анализа прогресса пациента, причем эта функция ранее не была доступна в контексте физиотерапевтических тренировок или реабилитации с помощью ходьбы по лестнице.
Например, компьютерная система предпочтительно записывает сеансы лечения пациента в локальном носителе данных или через сетевой доступ к удаленной базе данных, храня записи по меньшей мере конкретного пациента, введенного или выбранного с помощью пользовательского устройства 42 ввода, дат предыдущих сеансов лечения и максимальной высоты подъема, достигнутой на каждом сеансе. Высота подъема предпочтительно выведена непосредственно системой от датчика 50 высоты подъема, в частном случае дополнительно вводом от датчиков 56 нагрузки, для подтверждения того, что пациент успешно преодолел ступени на этой высоте. Эти данные позволяют точно оценивать возможность и скорость прогресса пациента в перемещении по лестнице.
Эти данные предпочтительно используют как основание для генерирования компьютерной системой 34 показателя возможности перемещения по лестнице для пациента, также именуемого как фактор прогресса при ходьбе по лестнице или SFP («Stair Factor of Progress»). Оценка возможности перемещения по лестнице указывает на текущую возможность пациента перемещения по лестнице и скорость улучшения настоящей возможности. Она может, например, состоять из числа, соответствующего самой большой высоте подъема в сантиметрах, которую пациент может преодолеть в настоящий момент, плюс буква, указывающая на скорость прогресса (в соответствии с диапазоном градиентов графика высота подъема в зависимости от даты), такая как, например, «а» указывает на быстрый прогресс или полную возможность с настоящим диапазоном высот подъема, «b» указывает на умеренную скорость прогресса, а «с» указывает на медленный или незначительный прогресс. Таким образом, например, фактор прогресса при перемещении по лестнице (SFP), обозначенный (4-а), указывает на текущее ограничение до 4-сантиметровых ступеней, но высокую скорость улучшения, а (8-с) указывает на возможность преодолеть ступени 8 см, но с прогнозом, что прогресс далее указанной точки в настоящий момент медленный. Этот фактор прогресса при перемещении по лестнице (SFP) будет являться стандартизированным параметром, предпочтительно автоматически генерируемым тренажером 10, и будет существенно улучшать коммуникацию между медицинским персоналом относительно возможностей и прогресса пациента. Эта оценка возможности перемещения по лестнице и/или другие данные, относящиеся к индивидуальному сеансу терапии или к целой последовательности сеансов лечения, может быть отправлена компьютерной системой 34 медицинскому работнику или другому авторизованному получателю через сеть.
Дополнительная предпочтительная характерная особенность тренажера 10 представляет собой автоматическую регулировку совокупности ступеней для установления правильной исходной высоты подъема для начала сеанса физиотерапии. В частности, компьютерная система 34 предпочтительно выполнена с возможностью получения данных, относящихся по меньшей мере к одному предыдущему сеансу лечения для данного пациента, от носителя 38 данных или из удаленного накопителя данных, причем компьютерная система выполнена с возможностью приведения в действие приводной системы 14 для приведения совокупности 12 ступеней к исходной высоте подъема для следующего сеанса лечения, причем исходную высоту подъема выводят по меньшей мере частично из данных, относящихся к предыдущему лечению. Например, сеансы терапии могут начинаться со ступеней с высотой подъема на 5 см меньше, чем максимальная достигнутая на предыдущем сеансе, и, таким образом, автоматически приводить ступени к подходящей высоте при выборе нового сеанса терапии для этого пользователя.
На фиг. 7А-12B изображены разнообразные варианты применения, использующие выходные сигналы от датчиков 56 нагрузки. Хотя описание касается в основном тренировки с помощью ходьбы по лестнице, следует понимать, что большинство функций, описанных далее, также применимы к терапии ходьбой, осуществляемой при нахождении тренажера при нулевой высоте подъема, функционирующего как амбулаторная система с параллельными брусьями.
Со ссылкой на фиг. 7А и 7B, следует понимать, что путем суммирования нагрузок, прикладываемых к поверхностям ступеней, возможно генерировать оценку общей нагрузки, прикладываемой к совокупности ступеней, и, следовательно, определять текущий вес пациента на совокупности ступеней. На фиг. 7А и 7B изображены изменения этой общей нагрузки в зависимости от времени при использовании тренажера. Следует отметить, что вес не является неизменным, так как он подвергается колебаниям (вследствие незначительных вертикальных ускорений) при перемещении ступней пациента от ступени к ступени, и при поднимании и опускании тела, а также вследствие перенесения веса на поручень. Однако изменение общей нагрузки в зависимости от времени характеризуется явным модальным значением (т.е., наиболее часто встречающимся значением), определяющим исходный уровень, около которого происходят колебания. Модальное значение изображено на фиг. 7А прерывистой линией 60. Это значение может быть легко определено компьютерной системой 34 посредством простых способов обработки, и его затем предпочтительно используют для обеспечения дополнительной функциональности.
В качестве примера, после определения текущего веса пациента компьютерная система 34 предпочтительно выполнена с возможностью вычитания настоящей суммы нагрузок от этого текущего веса для определения текущей нагрузки, прикладываемой пациентом к поручню. В частном случае может быть установлен предел безопасности, например, на заранее установленной части (например, 15%) текущего веса, а компьютерная система 34 может быть выполнена с возможностью генерирования предупредительного сигнала, например, звуковой сигнал, при превышении текущей нагрузкой, прикладываемой пациентом к поручню, этой заранее установленной части текущего веса пациента. На фиг. 7B предупредительный уровень обозначен прерывистой линией 62, а точка 64 отображает случай, при котором вес на поручень превысил допустимый предел (изображенный на этом чертеже как соответствующее уменьшение в общей измеренной нагрузке), что приводит к генерированию предупредительного сигнала.
На фиг. 8, 9А и 9B отдельно изображена нагрузка, измеренная на каждой поверхности проступи, причем каждая кривая обозначена соответствующим обозначением поверхности проступи: TR0, TR1, TR2 и TR3. Анализ этих кривых и времени перехода нагрузки между поверхностями проступей предоставляет существенную информацию о возможности преодоления ступеней пациентом.
Например, со ссылкой на фиг. 8, компьютерная система 34 предпочтительно выполнена с возможностью обработки сигналов от датчиков 56 нагрузки для определения периода времени, затрачиваемого пациентом на подъем по совокупности ступеней, в частном случае вычисляемого как время, затраченное на один шаг, или количество шагов в минуту. Время для преодоления перехода от каждой ступени может быть определено разными способами. В данном изображении подъем ступни от предыдущей ступени взят за стандартную эталонную точку, от которой измеряют продолжительность перехода между ступенями.
В дополнение к скорости, форма выходного сигнала датчика нагрузки также может быть использована для предоставления важной информации о силе и устойчивости движения пациента, указывающей на его управление крупной моторикой во время использования лестницы. Таким образом, в видах в увеличенном масштабе на фиг. 9А и 9B, равномерные сигналы по фиг. 9А указывают на хорошо управляемые непрерывные движения, а неравномерные сигналы по фиг. 9B указывают на отсутствие мышечного контроля и/или неустойчивость во время движения. Компьютерная система 34 предпочтительно выполнена с возможностью обработки сигналов от датчиков 56 нагрузки для определения по меньшей мере одного показателя управления крупной моторикой во время использования лестницы. В простом варианте реализации может присутствовать показатель «равномерности» сигналов, определенный относительными весами низко- и высокочастотных компонентов в сигнале, преобразованном с помощью преобразования Фурье. Другие формы обработки, такие как идентификация изменения направления переноса веса между ступенями, могут также предоставить важную дополнительную или альтернативную информацию.
Данные, отображенные на графиках, таких как фиг. 8, могут также быть преимущественно использованы с выходным сигналом датчиков 54 участка захвата, указывающим на то, находится ли участок захвата в пределах нормального диапазона участков относительно настоящего центра тяжести веса пациента на поверхности проступей. Это позволяет системе идентифицировать, тянется ли пациент вперед или отклоняется назад при переходе на следующую ступень, в отличие от нормального использования поручня только для устойчивости.
Следует отметить, что различные функции, описанные ранее, могут быть реализованы с использованием одного датчика нагрузки, установленного для поддержания каждой ступени. Особенно предпочтительные варианты реализации, в которых два или более, предпочтительно четыре датчика нагрузки поддерживают каждую ступень, обеспечивая дополнительную функциональность в соответствии со следующим описанием.
На фиг. 10А-11B изображена дополнительная функциональность, которая доступна при установке датчиков нагрузки, которые позволяют определять участок нагрузки относительно длины каждой из поверхностей проступей, т.е., воздействует ли нагрузка на центральную, правую или левую часть ступени. Это может быть достигнуто путем использования двух датчиков нагрузки, по одному на каждый конец ступени, или путем использования четырех датчиков нагрузки, с помощью суммирования выходных сигналов от правой и левой сторон каждой ступени.
На фиг. 10А и 10B изображены графики нагрузки на последовательно расположенные ступени в зависимости от времени, аналогично фиг. 8, однако на которых нагрузка на каждую ступень разложена на отдельные показатели нагрузки на левую сторону ступени (фиг. 10А) и нагрузку на правую сторону ступени (фиг. 10B). Прерывистая линия 60' на этом чертеже соответствует 50% от текущего веса пациента, причем эта нагрузка является ожидаемой, если пациент стоит на одной ступени, причем его вес равномерно распределен по длине ступени между правой и левой частями.
С использованием этих данных компьютерная система 34 предпочтительно выполнена с возможностью определения того, начал ли пациент движение с правой ноги или с левой ноги, при каждом переходе пациента от одной ступени к другой, и генерирования индикации двухстороннего или одностороннего использования. Таким образом, в примере по фиг. 10А и 10B график изменений нагрузки в зависимости от времени для каждой ступени изображает смещение к правой стороне в начале, и смещение к левой стороне в конце перед подъемом ноги. Это указывает (во время подъема) на то, что пациент неоднократно начинает движение с правой ступни. Во время спуска, когда пациент обращен в противоположном направлении, направленность противоположна.
На фиг. 11А и 11B изображены другие примеры подобных пар графиков, в этом случае указывающие начальное и конечное смещение на поверхности TR1 проступи на правую сторону, и начальное и конечное смещение на поверхности TR2 проступи на левую сторону. Это указывает на начало движения с разных ног.
Следует отметить, что среднее значение нагрузки на правую и левую стороны не обязательно находится в середине ступени, и что модальное значение нагрузки для графиков на фиг. 10A-11B не обязательно находится на линии 60'. Смещение от баланса между правой и левой сторонами указывает на удержание пациентом своего тела ближе к одному поручню, чем к другому. Эта информация также полезна для записи. Нога, с которой пользователь начинает движение, также может быть легко определена путем относительных смещений нагрузки вправо и влево, даже при наличии устойчивой тенденции к одной стороне.
Со ссылкой на фиг. 12А и 12B, в случае конфигурации из трех или большего количества не лежащих на одной прямой датчиков нагрузки, поддерживающих каждую поверхность проступи, совокупность датчиков нагрузки для каждой поверхности проступи предпочтительно генерирует сигналы, позволяющие определять участок нагрузки в двух измерениях для каждой из поверхностей проступей. Это позволяет оценивать положение ступни относительно переднего и заднего краев ступени, и, в частности, позволяет идентифицировать потенциально опасные варианты развития событий, в которых пациент переносит свою нагрузку на ступню, перекрывающую передний край ступени. Для этого компьютерная система 34 предпочтительно выполнена с возможностью генерирования предупредительного сигнала при удовлетворении нагрузкой на поверхность ступени условиям, указывающим на чрезмерную нагрузку на передний край поверхности проступи. На фиг. 12А и 12B изображено положение центра нагрузки для данной ступени вдоль направления спереди назад как функция времени. На фиг. 12А изображено нормальное изменение. Вес может быть изначально непродолжительно смещен по направлению к передней части ступени, например, при размещении пятки пациента на ступень, и может быть более сильно смещен к задней части ступени при завершающем отталкивании пальцами ног. Кратковременное смещение на переднюю часть ступени, таким образом, не считается проблематичным.
На фиг. 12B изображен случай, в котором смещение веса на переднюю часть остается выше порогового значения на протяжении длительного промежутка времени, что указывает на опасное расположение ступни. В этом случае система предпочтительно генерирует предупреждение, обычно путем включения зуммера или другого звукового сигнала тревоги.
Следует понимать, что приведенные выше описания даны исключительно в качестве примеров, и что возможны многие другие варианты реализации в пределах объема настоящего изобретения, определенного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФИЗИОТЕРАПЕВТИЧЕСКАЯ ЛЕСТНИЦА И СИСТЕМА НАКЛОНА | 2017 |
|
RU2755582C1 |
| ПОДВИЖНАЯ ЛЕСТНИЦА | 2009 |
|
RU2446263C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РЕАБИЛИТАЦИОННЫЙ КОМПЛЕКС, ОПОРА ДЛЯ СТОЯНИЯ С ВЕРТИКАЛЬНОЙ ЛЕСТНИЦЕЙ И ВЫДВИЖНЫМИ СТУПЕНЯМИ, БРУСЬЯ, ГОРКА-ОПОРА ДЛЯ ПОЛЗАНИЯ, ТРЕНАЖЕР РОВНЫЙ ШАГ, БАЛАНС-ПЛАТФОРМА, МОСТИК, БАЛАНС-ПЛАТФОРМА С БОРТАМИ | 2023 |
|
RU2818451C1 |
| ДВУХМАРШЕВАЯ ЛЕСТНИЦА ЗДАНИЯ | 2013 |
|
RU2538569C1 |
| ТРЕНАЖЕР ДЛЯ ХОДЬБЫ | 2007 |
|
RU2409342C1 |
| Способ комплексной реабилитации пациентов после перенесенной COVID-19 с поражением легких на втором этапе медицинской реабилитации | 2023 |
|
RU2800253C1 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| Складная аппарель бытового и эвакуационного назначения | 2015 |
|
RU2610937C1 |
| МОБИЛЬНЫЙ КОМПЬЮТЕРНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ОПЕРАТИВНЫХ СОТРУДНИКОВ МЧС | 2006 |
|
RU2316824C2 |
| "Устройство для тренировки "Бесконечная лестница" | 1989 |
|
SU1738295A1 |


Компьютеризованный физиотерапевтический тренажер с имитацией ходьбы по лестнице содержит совокупность по меньшей мере из трех горизонтальных поверхностей проступей и сопряженную приводную систему для регулирования высоты подъема между смежными поверхностями проступей для образования совокупности ступеней с одинаковым шагом для диапазона высот подъема. Совокупность датчиков измеряет параметры, относящиеся к физиотерапии, осуществляемой с использованием совокупности ступеней, и обеспечивает вывод данных в компьютерную систему. Датчики включают один или большее количество из датчика высоты подъема для определения шага ступеней, датчика частоты сердечных сокращений, датчика участка захвата поручня и датчиков нагрузки для анализа распределения веса пациента во время использования системы. 15 з.п. ф-лы, 12 ил.
1. Физиотерапевтическая система, содержащая:
(a) совокупность по меньшей мере из трех горизонтальных поверхностей проступей;
(b) приводную систему, механически соединенную с указанной совокупностью поверхностей проступей и выполненную с возможностью вертикального смещения по меньшей мере двух из указанных поверхностей проступей таким образом, чтобы регулировать высоту подъема между смежными указанными поверхностями проступей так, чтобы образовывать совокупность ступеней с одинаковым шагом для диапазона различных высот подъема;
(c) совокупность датчиков, содержащая по меньшей мере один датчик, установленный для измерения параметра, относящегося к физиотерапии, осуществляемой с использованием указанной совокупности ступеней; и
(d) компьютерную систему, содержащую по меньшей мере один процессор и энергонезависимый носитель данных, причем указанная компьютерная система связана с указанной совокупностью датчиков для приема указанного по меньшей мере одного параметра,
в которой указанный по меньшей мере один датчик содержит датчик, установленный для измерения параметра, указывающего текущую высоту подъема между смежными указанными поверхностями проступей,
отличающаяся тем, что указанная приводная система выполнена с возможностью смещения указанных поверхностей проступей исключительно посредством вертикального движения, причем каждая из поверхностей проступей, выполненных с возможностью смещения, имеет смежную поверхность подступенка для образования закрытой совокупности ступеней в любом положении в диапазоне различных высот подъема,
при этом указанный по меньшей мере один датчик содержит множество датчиков нагрузки, установленных для измерения нагрузки, прикладываемой к указанным поверхностям проступей,
а указанная компьютерная система выполнена с возможностью обработки сигналов от указанных датчиков нагрузки для определения периода времени, затрачиваемого пациентом на перемещение от одной из указанных поверхностей проступей к другой из указанных поверхностей проступей.
2. Физиотерапевтическая система по п. 1, в которой указанная компьютерная система содержит пользовательский интерфейс, выполненный с возможностью приема входного сигнала, идентифицирующего пациента, проходящего лечение, и при этом указанная компьютерная система хранит записи множества сеансов лечения для каждого пациента, причем записи включают текущую высоту подъема.
3. Физиотерапевтическая система по п. 2, в которой указанная компьютерная система выполнена с возможностью генерирования показателя возможности использования лестницы пациентом, причем показатель возможности использования лестницы указывает на текущую возможность пациента подъема по лестнице и скорость улучшения текущей возможности.
4. Физиотерапевтическая система по п. 1, в которой указанный по меньшей мере один датчик содержит по меньшей мере один датчик частоты сердечных сокращений, установленный для измерения параметра, указывающего на частоту сердечных сокращений пациента на указанной совокупности ступеней.
5. Физиотерапевтическая система по п. 4, которая дополнительно содержит поручень, проходящий вдоль по меньшей мере одной стороны указанной совокупности ступеней, и при этом указанный по меньшей мере один датчик частоты сердечных сокращений встроен в указанный поручень.
6. Физиотерапевтическая система по п. 1, которая дополнительно содержит поручень, проходящий вдоль по меньшей мере одной стороны указанной совокупности ступеней, и при этом указанный по меньшей мере один датчик содержит по меньшей мере один контактный датчик, установленный для генерирования выходного сигнала, указывающего на участок, на котором пациент, использующий указанную совокупность ступеней, держится за указанный поручень.
7. Физиотерапевтическая система по п. 1, дополнительно содержащая поручень, проходящий вдоль по меньшей мере одной стороны указанной совокупности ступеней, и в которой указанная компьютерная система выполнена с возможностью:
(a) наблюдения за суммой нагрузок, измеряемых указанным множеством датчиков нагрузки;
(b) определения текущего веса пациента на указанной совокупности ступеней;
(c) вычитания текущей суммы указанных нагрузок от указанного текущего веса для определения текущей нагрузки, прикладываемой пациентом к указанному поручню;
(d) генерирования предупреждающего сигнала при превышении указанной текущей нагрузкой, прикладываемой пациентом к указанному поручню, заранее установленной части указанного текущего веса пациента.
8. Физиотерапевтическая система по п. 1, в которой указанная компьютерная система выполнена с возможностью обработки сигналов от указанных датчиков нагрузки для определения по меньшей мере одного показателя управления крупной моторикой во время использования лестницы.
9. Физиотерапевтическая система по п. 1, в которой указанный по меньшей мере один датчик нагрузки реализован как по меньшей мере два датчика нагрузки для каждой поверхности проступи, указанные по меньшей мере два датчика нагрузки установлены для генерирования сигналов, обеспечивающих возможность определения участка нагрузки относительно длины каждой из указанных поверхностей проступей.
10. Физиотерапевтическая система по п. 9, в которой указанная компьютерная система выполнена с возможностью определения того, начал ли пациент движение с правой ноги или с левой ноги при каждом переходе пациента от одной ступени к другой, и генерирования индикации двухстороннего или одностороннего использования.
11. Физиотерапевтическая система по п. 1, в которой указанное множество датчиков нагрузки реализовано как совокупность датчиков нагрузки, установленных таким образом, чтобы генерировать сигналы, обеспечивающие определение участка нагрузки в двух измерениях для каждой из указанных поверхностей проступей.
12. Физиотерапевтическая система по п. 11, в которой указанная компьютерная система выполнена с возможностью генерирования предупреждающего сигнала при удовлетворении нагрузкой на поверхность проступи условиям, указывающим на чрезмерную нагрузку на переднюю кромку указанной поверхности проступи.
13. Физиотерапевтическая система по п. 1, в которой указанная компьютерная система функционально соединена с указанной приводной системой, причем указанная компьютерная система выполнена с возможностью извлечения данных из указанного носителя данных или из удаленного носителя данных, относящихся по меньшей мере к одному прошлому сеансу лечения для данного пациента, причем указанная компьютерная система выполнена с возможностью приведения указанной приводной системы в действие для приведения указанной совокупности ступеней к исходной высоте подъема для следующего сеанса лечения, причем указанную исходную высоту подъема по меньшей мере частично выводят из указанных данных.
14. Физиотерапевтическая система по п. 1, в которой указанная приводная система выполнена с возможностью смещения указанных поверхностей проступей таким образом, чтобы образовывать указанную совокупность ступеней с множеством высот подъема, по существу покрывающих большую часть диапазона от 0 см до 18 см.
15. Физиотерапевтическая система по п. 1, в которой указанная приводная система дополнительно выполнена с возможностью смещения указанных поверхностей проступей таким образом, чтобы располагать все из указанного множества поверхностей проступей рядом друг с другом с образованием непрерывной плоской поверхности.
16. Физиотерапевтическая система по п. 1, в которой указанная компьютерная система дополнительно содержит коммуникационные компоненты для соединения с проводной или беспроводной сетью, и при этом указанная компьютерная система выполнена с возможностью передачи отчета, содержащего данные, относящиеся к сеансу лечения пациента, через указанную сеть.
| US 5901813 A, 11.05.1999 | |||
| US 20100099541 A1, 22.04.2010 | |||
| US 5207621 A, 04.05.1993 | |||
| US 2012264572 A1, 18.10.2012. |

