Область применения
Изобретение относится к области реабилитационной медицины, в частности к средствам и методам реабилитации пациентов с нарушениями опорно-двигательной функции, и восстановления нервно-мышечного аппарата после перенесенных травм и операций.
Уровень техники
В современной ортопедии значительные усилия и средства затрачиваются на лечение пациентов с нарушениями опорно-двигательной функции, как в результате механических травм позвоночника, так и вследствие поражений нервной системы после перенесенных острых заболеваний, таких, как инсульты и т.п. Реабилитация таких пациентов – весьма продолжительный и дорогостоящий процесс.
В последнее время для решения этой задачи шире применяются методы механотерапии. Они заключаются в управляемом механическом воздействии на элементы опорно-двигательного аппарата пациента, в том числе и с имитацией нормальной двигательной активности. В мире проведено значительное число клинических исследований, которые подтверждают эффективность таких методов и для регенерации двигательной мускулатуры, так и для восстановления нервно-мышечной проводимости и контроля движений пациентом. В некоторых странах такие методы включены в стандартные протоколы лечения и поддерживаются программами страховой медицины. Однако все существующие аналоги на сегодняшний день имеют ряд ограничений, связанных с тем, что имитируют только один тип движения, а именно - по горизонтальной поверхности. Иным недостатком существующих аналогов является большой габарит и вес (около 4000 мм и 1000 кг, соответственно).
Ниже представлен ряд запатентованных технических решений-аналогов, представляющих собой тренажерные комплексы для реабилитации опорно-двигательной функции пациентов.
Известно техническое решение, раскрытое в патенте на изобретение CN101536955 «Вертикальный робот, следующий за действиями пациента, для облегченной реабилитационной тренировки ходьбы».
Изобретение представляет собой вертикальный реабилитационный тренажер с контролем веса для тренировки ходьбы. Тренажер содержит электрическую беговую дорожку, подвесную систему и механические опоры экзоскелета и поддерживающие устройства. Механические опоры через подвесную систему крепятся к металлической раме. Причем механические опоры - роботизированные, контроль осуществляется за всем телом пациента, прикрепленным к нему с помощью ремней. Движение нижних конечностей осуществляется в направлении вверх и вниз, за счет сгибания нижних конечностей в коленном суставе, контролируемого программой.
Данный тренажер уступает по характеристикам изобретению в виду наличия только двух степеней свободы для перемещения стопы, а именно в вертикальном и горизонтальном направлении. Так же тренажер имеет ограничения по допустимому росту пациента, из-за ограничения в размерах механических опор.
Известно техническое решение, раскрытое в патенте на изобретение EP1322272 «Ортез для механизированной походки».
Изобретение представляет собой реабилитационный тренажер с программно контролируемым движением, содержащий опорную раму, подвесную систему, прикрепленную к опорной раме, механизированные направляющие для нижних конечностей пациента и беговую дорожку. Пациент закрепляется в подвесной системе с помощью ремней, его нижние конечности закрепляются в направляющих механизированной системы в двух точках: в коленном суставе и в области лодыжки.
Существенным недостатком данного изобретения является тот факт, что стопы пациента касаются непосредственно беговой дорожки, без поддержки какой-либо промежуточной платформой, что, в конечном счете, может привести к некорректному процессу реабилитации в виду отсутствия фиксации и поддержки стопы и травмам.
Также известно техническое решение, раскрытое в патенте на изобретение RU2054920 «Способ реабилитации опорно-двигательного аппарата и устройство для его осуществления».
Изобретение представляет собой реабилитационный тренажер, содержащий опорную раму с подвесной системой, беговую дорожку, систему контроля движения коленных суставов из двух движущихся попеременно металлических штоков с ременными кольцами на свободных концах и тоководы, с помощью которых производится дополнительная стимуляция мускулатуры нижних конечностей. Пациента присоединяют к подвесной системе ремнями, помещают стопы на беговую дорожку, колени фиксируются ремнями системы контроля движения коленного сустава. В ходе движения сообщаются дополнительные электрические импульсы мускулатуре нижних конечностей.
Существенным недостатком изобретения является его потенциальная травмоопасность в виду использования беговой дорожки в качестве основы для технического решения. При этом отсутствует фиксация стопы, а фиксация коленного сустава – ограниченная и производится только по горизонтальной оси.
Также известно техническое решение, раскрытое в патенте на изобретение US6666798 «Метод, аппарат и система для автоматизации тренировки поддержки веса тела (BWST) передвижений на двух ногах по беговой дорожке с использованием программируемого шагового устройства (PSD), работающего как система с экзоскелетным приводом от фиксированного основания».
Изобретение представляет собой реабилитационный тренажер для тренировки нижних конечностей, состоящий из подвесной системы с контролем веса, металлических поручней, беговой дорожки и системой контроля движения нижних конечностей. При этом пациент соединен с подвесной системой с помощью ремней, зафиксированных подмышками, на поясе и в области таза, а так же с системой контроля движения нижних конечностей, которая присоединяется к лодыжкам и коленным суставам. Особенностью системы контроля движения нижних конечностей является тот факт, что между контролирующим механизмом имеется промежуточное звено – человек или медицинский работник, который также соединен с системой контроля движения нижних конечностей лодыжками и коленными суставами и осуществляет дополнительный контроль движений пациента.
Главным недостатком этого изобретения является выбранный эталон обычного профиля походки без возможности реализации сценария подъема/спуска по ступеням лестницы или сценария преодоления препятствий.
Прототипом для изобретения выбрано наиболее близкое техническое решение, раскрытое в патенте на изобретение CN102335086 «Реабилитационный робот-тренажер с шестью степенями свободы ступней/ног и метод их контроля».
Изобретение представляет собой реабилитационный тренажер для тренировки нижних конечностей с шестью степенями свободы и метод контроля, относящийся к области техники - реабилитации. Тренажер содержит опорную раму, беговую дорожку, регулируемую панель и механические опоры экзоскелета, которые состоят из тазобедренного, коленного, голеностопного суставов, последовательно соединенных металлическими телескопическими цилиндрическими электрическими направляющими и пользовательского интерфейса. К экзоскелету голеностопного сустава прикреплены металлические пластины, на которые устанавливаются ступни пациента. Регулируемая панель соединена с механическими опорами, закрепленными на опорной раме. Механические опоры в данном техническом решении также выполняют роль подвесной системы с контролем веса, поскольку они крепятся к телу пациента с помощью ремней. Причем механические опоры экзоскелета и регулируемая панель контролируются программно. Способ управления включает следующие этапы: ввод физических параметров пациента, чтение предварительно сохраненного текстового документа, запись информации в глобальные переменные и выполнение программы.
Тренажер работает следующим образом. Тело пациента прикрепляется к механическим опорам экзоскелета с помощью ремней, а его стопы закрепляются на металлических пластинах. Металлические пластины контактируют с беговой дорожкой за счет опускания механических опор экзоскелета с помощью регулируемой панели. Далее запускается программа, и механические опоры осуществляют контроль веса и перемещения нижних конечностей, как в вертикальном, так и в горизонтальном направлении.
Данный тренажер имеет существенный недостаток, заключающийся в том, что изобретение не позволяет производить симуляцию подъема/спуска по лестнице, что является одним из важнейших упражнений в ходе реабилитации пациента с дисфункцией нижних конечностей.
Раскрытие изобретения
Задачей заявляемого изобретения является улучшение контроля над механотерапией нижних конечностей, а также расширение ее возможностей за счет снабжения тренажера манипулятором-приводом нижних конечностей человека с тремя степенями свободы.
Техническим результатом заявляемого изобретения является контролируемый процесс перемещения стоп пациента с ограниченной подвижностью нижних конечностей в ходе механотерапии нижних конечностей и возможность реализации дополнительного комплекса нагрузок в виде подъема/спуска по лестнице, преодоления преград.
Заявляемый технический результат достигается тем, что в тренажерном комплексе для механотерапии нижних конечностей, включающем в себя подвесную систему с контролем веса пациента, блоки контроля усилий и перемещений и управляющее программное обеспечение, включающее в себя специальный контроллер верхнего уровня и пользовательский интерфейс, два механических манипулятора-привода нижних конечностей, таким образом, что каждый из механических манипуляторов-приводов нижних конечностей содержит, по крайней мере, три независимых друг от друга линейных электропривода с тремя независимыми электродвигателями, три пары кареток, движущихся по линейным направляющим, закрепленным на опорной раме, соединенных системой непересекающихся рычагов, шарнирно прикрепленных с одного конца к кареткам, а с другого - к платформе, причем все 6 электродвигателей соединены с блоками контроля и перемещения, таким образом, что механические манипуляторы-приводы нижних конечностей выполнены с возможностью перемещения каждой из платформ по трем степеням свободы. При этом подвесная система с контролем веса пациента может быть реализована с помощью контроллера веса и соединенными с ним подвесными ремнями системы облегчающей подвески через 2 параллельных вертикальных штока. При этом блоки контроля усилий и перемещений, выполнены из, по крайней мере, 6 датчиков угла поворота ротора электродвигателя и контроллеров. При этом платформа может быть выполнена перфорированной.
Описание заявленного решения.
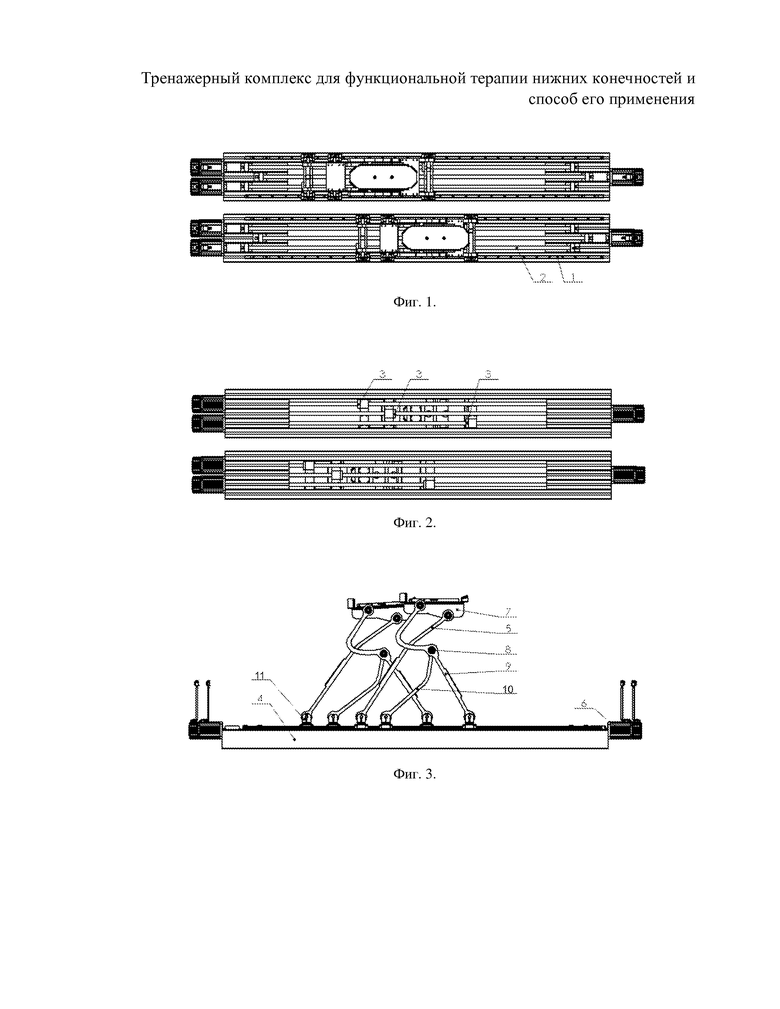
Пара манипуляторов-приводов для двух нижних конечностей пациента, включенная в изобретение, приведена на фиг. 1 (вид сверху), фиг. 2 (вид снизу) и фиг. 3 (вид сбоку).
Изобретение включает в себя линейные направляющие 1, линейный электропривод 2, состоящий из электродвигателя 6 и преобразователя вращательного движения в поступательное 2, образованного шарико-винтовой парой 3 или шкивом и замкнутым ремнем, опорную раму 4, рычаг-1 (5), платформу манипулятора-привода нижних конечностей 7, шарнир 8, рычаг-2 (9), рычаг-3 (10) и каретки 11.
Опорная рама манипулятора-привода нижних конечностей собрана из элементов опорной рамы из металлических профилей.
К раме закреплены линейные направляющие 1, электродвигатели 6 и опорные концы линейного привода 2, преобразующего вращательное движение электродвигателей 6 в линейное перемещение кареток 11 в горизонтальной плоскости. Три пары кареток 11 требуют установки трех электродвигателей 6 и трех приводов 2. Линейные направляющие кареток 1, предназначенные для перемещения кареток – общие для трех пар кареток одного манипулятора-привода нижних конечностей.
Поворотные шарниры рычагов 5, 9 и 10 содержат обоймы для установки пар опорно-радиальных подшипников, выполненных зацело с телом рычага. Пары рычагов соединены дополнительными фиксирующими проставками, увеличивающими поперечную жесткость рычажного механизма. К верхним концам рычагов на аналогичных поворотных шарнирах закреплена платформа манипулятора привода нижних конечностей 7, на которую устанавливается подошва обуви пациента. Платформа может быть выполнена перфорированной.
Тело пациента закрепляется в вертикальном положении в подвесной системе с контролем веса пациента любой известной модификации с помощью ремней. Подвесная система с контролем веса пациента крепится к опорной раме.
Примером подвесной системы с контролем веса пациента может служить следующая конструкция. Тело пациента закрепляется с помощью ремней за подмышки и пояс, которые крепятся к опорной раме путем фиксирования ремней на 2х параллельных вертикальных металлических штоках, связанных с подвесной системой с контролем веса пациента. Тело пациента располагается между вертикальными металлическими штоками. Максимально разрешенный рост пациента в такой конструкции – 220 см.
В изобретении используются электроприводы, включающие в себя бесконтактные электродвигатели, датчики угла поворота ротора электродвигателя и контроллеры.
Контроллеры реализуют режим векторного управления и позволяют независимо задавать параметры вращения ротора электродвигателя и соответственно, положение, и скорость перемещения кареток рычажной системы. Поскольку во время выполнения «шага» манипулятора электродвигатели работают в повторно-кратковременном режиме (фазы быстрого перемещения и неподвижности конечности пациента чередуются), допускается форсирование каждого электродвигателя 6.
Устройство в целом содержит шесть независимых электроприводов, по одному на каждый электродвигатель 6.
Объединение электроприводов в единую систему выполнено при помощи специально разработанного и изготовленного контроллера верхнего уровня, работающего под управлением операционной системы реального времени. Этот контроллер реализует прием команд управления платформой манипулятора-привода нижних конечностей, тригонометрические вычисления в реальном времени, необходимые для преобразования заданных координат платформы в положения и скорости кареток и соответствующие им углы роторов электродвигателей, доставку команд контроллерам электродвигателей, контроль возможного скольжения электроприводов, температуры и потребляемой мощности двигателей.
Специализированный контроллер позволяет формировать точные временные диаграммы для управления электроприводами и подвесной системой с контролем веса пациента. Для организации пользовательского интерфейса использована технология html5 и встроенный веб-сервер, таким образом, что управление устройством осуществляется с помощью любой существующей ЭВМ, например, планшета или настольного компьютера.
Интерфейс реализован на языках html5 и Javascript и предоставляет возможность ручного управления манипуляторами и задания траекторий движений. Отличительная особенность реализации независимого управления манипуляторами в ручном режиме заключается в том, что реализовано 3 режима: ввод координат и «перетаскивание» символов манипуляторов на экране, а также выполнение перемещений по заранее подготовленной программе в форме табличных данных.
Для связи браузера с управляющим контроллером используется протоколы http и websockets, на управляющем контроллере исполняется программы встроенного web сервера, который обеспечивает связь программы пользовательского интерфейса с программой управления движением манипуляторов-приводов нижних конечностей.
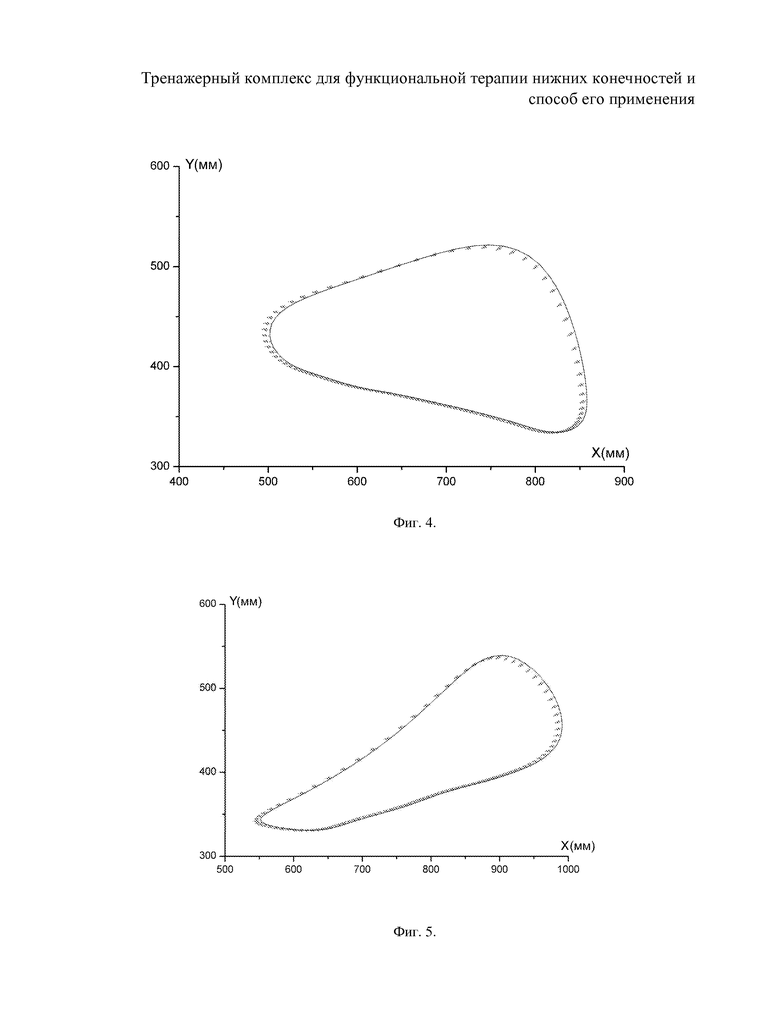
Устройство работает следующим образом. Пациента помещают в вертикальном положении и закрепляют ремнями верхнюю часть туловища таким образом, чтобы ремни поддерживали пациента за подмышки и талию. Стопы пациента устанавливают на платформы манипуляторов-приводов нижних конечностей. При необходимости фиксируют коленный сустав шиной, накладываемой на наружную поверхность голени. Затем в программе запускают либо заранее заложенный алгоритм, либо вводят параметры пациента вручную (численно, либо графически "перетаскиванием"). После ввода параметров запускают движение манипуляторов-приводов нижних конечностей. Параметры передаются и затем обрабатываются контроллером верхнего уровня, преобразую их в набор команд для электроприводов. Линейные электроприводы, связывающие электродвигатели 6 с каретками 11 путем преобразования вращательного движения в поступательное, приводят в движение каретки 11 и связанную с ними непересекающуюся систему рычагов 5, 9 и 10, шаринрно соединенных с каретками 11. Это, в свою очередь, приводит в движение платформы механических манипуляторов-приводов 7 с закрепленными на них ступнями. Платформы движутся по биоморфной траектории в вертикальной плоскости, параллельной направляющим, и, в зависимости от выполняемого программного сценария, могут имитировать движение по плоской, наклонной поверхности, а также движение по ступенькам вверх/вниз и преодоление преград. В контексте данной заявки биоморфной траекторией называется траектория, основанная на экспериментальных наблюдениях за траекторией движения стопы человека. Примеры такой траектории представлены на фиг. 4 и фиг. 5.
В программе также предусмотрены алгоритмы: плавная остановка работы манипуляторов-приводов нижних конечностей с выходом на безопасную и удобную позицию, экстренное торможение, а также ограничение по резкому ускорению и высокой скорости движения платформ.
Ниже представлен ряд запатентованных технических решений-аналогов, представляющих собой способы тренировки при механотерапии нижних конечностей с использованием тренажерных комплексов для реабилитации опорно-двигательной функции пациентов.
Также известно техническое решение, раскрытое в патенте на изобретение RU2054920 «Способ реабилитации опорно-двигательного аппарата и устройство для его осуществления».
Для тренировки нижних конечностей при механотерапии используют реабилитационный тренажер, содержащий опорную раму с подвесной системой, беговую дорожку, систему контроля движения коленных суставов из двух движущихся попеременно металлических штоков с ременными кольцами на свободных концах и тоководы, с помощью которых производится дополнительная стимуляция мускулатуры нижних конечностей. Пациента присоединяют к подвесной системе ремнями, помещают стопы на беговую дорожку, колени фиксируются ремнями системы контроля движения коленного сустава. Тело пациента подвешивают к подвесной системе. Стопы передвигаются по беговой дорожке вперед-назад, как при обычной ходьбе, а коленный сустав перемещают системой контроля движения коленного сустава. В ходе движения также сообщают дополнительные электрические импульсы мускулатуре нижних конечностей.
Существенным недостатком данного способа является его потенциальная травмоопасность в виду использования беговой дорожки в качестве основы для технического решения. При этом отсутствует фиксация стопы, а фиксация коленного сустава – ограниченная и производится только по горизонтальной оси.
Также известно техническое решение, раскрытое в патенте на изобретение US6666798 «Метод, аппарат и система для автоматизации тренировки поддержки веса тела (BWST) передвижений на двух ногах по беговой дорожке с использованием программируемого шагового устройства (PSD), работающего как система с экзоскелетным приводом от фиксированного основания».
Для тренировки нижних конечностей при механотерапии используют реабилитационный тренажер для тренировки нижних конечностей, состоящий из подвесной системы с контролем веса, металлических поручней, беговой дорожки и системой контроля движения нижних конечностей. При этом пациент соединен с подвесной системой с помощью ремней, зафиксированных подмышками, на поясе и в области таза, а так же с системой контроля движения нижних конечностей, которая присоединяется к лодыжкам и коленным суставам. Особенностью системы контроля движения нижних конечностей является тот факт, что между контролирующим механизмом имеется промежуточное звено – человек или медицинский работник, который также соединен с системой контроля движения нижних конечностей лодыжками и коленными суставами и осуществляет дополнительный контроль движений пациента. Пациента присоединяют к подвесной системе, и пациент держится за поручни, стопы пациента и помощника помещают на беговую дорожку, и фиксируют коленные суставы и лодыжки пациента и помощника системой контроля движения нижних конечностей, после чего включают беговую дорожку и систему контроля движения нижних конечностей.
Главным недостатком этого изобретения является выбранный эталон обычного профиля походки без возможности реализации сценария подъема/спуска по ступеням лестницы или сценария преодоления препятствий.
Прототипом для изобретения выбрано наиболее близкое техническое решение, раскрытое в патенте на изобретение CN102335086 «Реабилитационный робот-тренажер с шестью степенями свободы ступней/ног и метод их контроля».
Для тренировки нижних конечностей при механотерапии используют реабилитационный тренажер для тренировки нижних конечностей с шестью степенями свободы и метод контроля, относящийся к области техники - реабилитации. Тренажер содержит опорную раму, беговую дорожку, регулируемую панель и механические опоры экзоскелета, которые состоят из тазобедренного, коленного, голеностопного суставов, последовательно соединенных металлическими телескопическими цилиндрическими электрическими направляющими и пользовательского интерфейса. К экзоскелету голеностопного сустава прикреплены металлические пластины, на которые устанавливаются ступни пациента. Регулируемая панель соединена с механическими опорами, закрепленными на опорной раме. Механические опоры в данном техническом решении также выполняют роль подвесной системы с контролем веса, поскольку они крепятся к телу пациента с помощью ремней. Причем механические опоры экзоскелета и регулируемая панель контролируются программно. Способ управления включает следующие этапы: ввод физических параметров пациента, чтение предварительно сохраненного текстового документа, запись информации в глобальные переменные и выполнение программы.
Тренажер работает следующим образом. Тело пациента прикрепляется к механическим опорам экзоскелета с помощью ремней, а его стопы закрепляются на металлических пластинах. Металлические пластины контактируют с беговой дорожкой за счет опускания механических опор экзоскелета с помощью регулируемой панели. Далее запускается программа, и механические опоры осуществляют контроль веса и перемещения нижних конечностей, как в вертикальном, так и в горизонтальном направлении.
Данный тренажер имеет существенный недостаток, заключающийся в том, что изобретение не позволяет производить симуляцию подъема/спуска по лестнице, что является одним из важнейших упражнений в ходе реабилитации пациента с дисфункцией нижних конечностей.
Раскрытие изобретения
Задачей заявляемого изобретения является способ улучшения контроля над механотерапией нижних конечностей, а также расширение ее возможностей за счет снабжения тренажера манипулятором-приводом нижних конечностей человека с тремя степенями свободы.
Техническим результатом заявляемого изобретения является контролируемый процесс перемещения стоп пациента с ограниченной подвижностью нижних конечностей в ходе механотерапии нижних конечностей и возможность реализации дополнительного комплекса нагрузок в виде подъема/спуска по лестнице, преодоления преград.
Вторым заявляемым изобретением является способ тренировки пациента при механотерапии нижних конечностей с помощью тренажерного комплекса для механотерапии нижних конечностей, отличающимся тем, что стопы пациента закрепляют на платформах механических манипуляторов-приводов и подвешивают его за подмышки и талию в подвесной системе с контролем веса пациента с использованием системы ремней, затем вводят физические параметры пациента через пользовательский интерфейс и затем запускают движение манипуляторов-приводов нижних конечностей по алгоритму, скорректированному по физическим параметрам пациента, таким образом, что платформы движутся по биоморфной траектории в вертикальной плоскости, параллельной направляющим. При этом нижние конечности пациента фиксируют шиной, накладываемой на внешнюю сторону голени, фиксирующую стопу, голень и коленный сустав. При этом остановка платформ механических манипуляторов-приводов происходит плавно и выводит их в удобное для пациента положение согласно предусмотренному алгоритму. При этом тренажер для механотерапии нижних конечностей выполнен с возможностью экстренной остановки. При этом перемещение манипуляторов-приводов нижних конечностей выполнено с возможностью имитации преодоления препятствий и имитации спуска/подъема по лестнице с помощью специально разработанного алгоритма.
Способ тренировки при механотерапии нижних конечностей с использованием тренажера для механотерапии нижних конечностей заключается в следующем. Пациента пристегивают ремнями и подсоединяют к подвесной системе. Затем помещают стопы пациента на манипуляторы-приводы нижних конечностей, вводят физические параметры пациента с помощью пользовательского интерфейса, после чего запускают движение манипуляторов-приводов нижних конечностей по алгоритму, сформированному с учетом физических параметров пациента. В результате этого платформы манипуляторов-приводов нижних конечностей двигаются по заданной биоморфной траектории расположенной в вертикальной плоскости, параллельной направляющим манипуляторов-приводов нижних конечностей. По окончанию процесса тренировки манипуляторы-приводы нижних конечностей согласно разработанному алгоритму, выходят в безопасное и удобное положение. Программа создана с расчетом на возможность перемещения платформ манипулятора-привода нижних конечностей с симуляцией процессов подъема и спуска по лестнице и симуляции процесса преодоления преград. Контроль перемещения манипуляторов-приводов осуществляется контроллером верхнего уровня с точностью до ±1 мс и ±2 мм. Также предусмотрена возможность экстренной остановки платформ манипуляторов-приводов нижних конечностей.
Таким образом, тренажер для механотерапии нижних конечностей и способ тренировки при механотерапии нижних конечностей позволяют расширить диапазон нагрузок при тренировке, такие как подъем и спуск по лестнице и преодоление препятствий и снизить уровень травмоопасности процесса реабилитации. Изобретение промышленно применимое.
Фиг. 1. Общий вид манипуляторов-приводов нижних конечностей в сборе, вид сверху. Показаны узлы и детали манипуляторов: 1 – линейная направляющая каретки, 2 – винт шариково-винтовой пары.
Фиг. 2. Общий вид манипуляторов-приводов нижних конечностей в сборе вид снизу. Показаны узлы и детали манипуляторов: 3 – гайка шариково-винтовой пары.
Фиг. 3. Общий вид манипуляторов-приводов нижних конечностей в сборе вид сбоку. Показаны узлы и детали манипуляторов: 4 – элемент опорной рамы из металлического профиля, 5 – рычаг-1, 6 – электродвигатель, 7 – платформа манипулятора-привода нижних конечностей, 8 – шарнир, 9 – рычаг-2, 10 – рычаг-3, 11 – каретка.
Фиг. 4. Биоморфная траектория перемещения платформ манипуляторов-приводов нижних конечностей при имитации движения по лестнице вверх. Серыми стрелками обозначено направление движения.
Фиг. 5. Биоморфная траектория перемещения платформ манипуляторов-приводов нижних конечностей при имитации движения по лестнице вниз. Серыми стрелками обозначено направление движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| Способ комплексной медицинской реабилитации пациентов после реконструктивных операций по поводу переломов костей нижних конечностей на основе технологии виртуальной реальности с БОС | 2024 |
|
RU2831885C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТА С НАРУШЕНИЕМ ПОСТУРАЛЬНОГО БАЛАНСА | 2016 |
|
RU2626912C1 |
| Способ реабилитации пациентов после операции эндопротезирования тазобедренного сустава по поводу коксартроза | 2023 |
|
RU2806494C1 |
| Способ медицинской реабилитации после тотального эндопротезирования коленного сустава в раннем послеоперационном периоде | 2024 |
|
RU2829180C1 |
| Способ восстановления функции ходьбы и равновесия в остром периоде ишемического инсульта | 2022 |
|
RU2797372C1 |
| НЕИНВАЗИВНАЯ ЭЛЕКТРОДНАЯ МАТРИЦА СПИНАЛЬНОГО НЕЙРОПРОТЕЗА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2021 |
|
RU2778009C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ПАЦИЕНТОВ С ПОВРЕЖДЕНИЕМ СПИННОГО И ГОЛОВНОГО МОЗГА | 2016 |
|
RU2639794C1 |
| УСТРОЙСТВО РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2765403C1 |
| Способ реабилитации пациентов после хирургического лечения перелома проксимального отдела бедренной кости на фоне остеопороза | 2020 |
|
RU2740262C1 |
Изобретение относится к области реабилитационной медицины, в частности к средствам и методам реабилитации пациентов с нарушениями опорно-двигательной функции, и восстановления нервно-мышечного аппарата после перенесенных травм и операций. Техническим результатом заявляемого изобретения является контролируемый процесс перемещения стоп пациента с ограниченной подвижностью нижних конечностей в ходе механотерапии нижних конечностей и возможность реализации дополнительного комплекса нагрузок в виде подъема/спуска по лестнице, преодоления преград. Заявляемый технический результат достигается тем, что в тренажерном комплексе для механотерапии нижних конечностей, включающем в себя подвесную систему с контролем веса пациента, блоки контроля усилий и перемещений и управляющее программное обеспечение, включающее в себя специальный контроллер верхнего уровня и пользовательский интерфейс, два механических манипулятора-привода нижних конечностей, таким образом, что каждый из механических манипуляторов-приводов нижних конечностей содержит, по крайней мере, три независимых друг от друга линейных электропривода с тремя независимыми электродвигателями, три пары кареток, движущихся по линейным направляющим, закрепленным на опорной раме, соединенных системой непересекающихся рычагов, шарнирно прикрепленных с одного конца к кареткам, а с другого - к платформе, причем все 6 электродвигателей соединены с блоками контроля и перемещения, таким образом, что механические манипуляторы-приводы нижних конечностей выполнены с возможностью перемещения каждой из платформ по трем степеням свободы. При этом подвесная система с контролем веса пациента может быть реализована с помощью контроллера веса и соединенными с ним подвесными ремнями системы облегчающей подвески через 2 параллельных вертикальных штока. При этом блоки контроля усилий и перемещений, выполнены из, по крайней мере, 6 датчиков угла поворота ротора электродвигателя и контроллеров. При этом платформа может быть выполнена перфорированной. Таким образом, тренажер для механотерапии нижних конечностей позволяет расширить диапазон нагрузок при тренировке, таких как подъем и спуск по лестнице и преодоление препятствий, и снизить уровень травмоопасности процесса реабилитации. 2 н. и 7 з.п. ф-лы, 5 ил.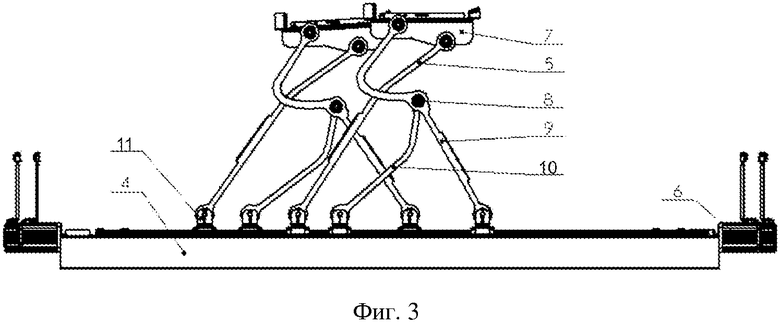
1. Тренажерный комплекс для механотерапии нижних конечностей, включающий в себя подвесную систему с контролем веса пациента, блоки контроля усилий и перемещений, два механических манипулятора-привода нижних конечностей и управляющее программное обеспечение, включающее в себя специальный контроллер верхнего уровня и пользовательский интерфейс, отличающиеся тем, что каждый из механических манипуляторов-приводов нижних конечностей содержит, по крайней мере, три независимых друг от друга линейных электропривода с тремя независимыми электродвигателями, три независимых друг от друга пары кареток, перемещаемых электроприводами по линейным направляющим, закрепленным на опорной раме, и соединенных системой непересекающихся рычагов, прикрепленных с одного конца к кареткам, а с другого - к платформе, причем все 6 электродвигателей соединены с блоками контроля и перемещения, таким образом, что механические манипуляторы-приводы нижних конечностей выполнены с возможностью управляемого перемещения по трем степеням свободы.
2. Тренажерный комплекс для механотерапии нижних конечностей по п.1, отличающийся тем, что подвесная система с контролем веса пациента реализована с помощью контроллера веса и соединенными с ним подвесными ремнями системы облегчающей подвески через 2 параллельных вертикальных стальных штока.
3. Тренажерный комплекс для механотерапии нижних конечностей по п.1, отличающийся тем, что блоки контроля усилий и перемещений выполнены из, по крайней мере, 6 датчиков положения роторов электродвигателей и контроллеров электроприводов.
4. Тренажерный комплекс для механотерапии нижних конечностей по п.1, отличающийся тем, что платформа выполнена перфорированной.
5. Способ тренировки пациента при механотерапии нижних конечностей с помощью тренажерного комплекса для механотерапии нижних конечностей, заключающийся в том, что стопы пациента закрепляют на платформах механических манипуляторов-приводов и подвешивают его за подмышки и талию к подвесной системе с контролем веса пациента с использованием системы ремней, затем вводят данные через пользовательский интерфейс и затем производят запуск манипуляторов-приводов нижних конечностей, таким образом, что нижние конечности пациента, закрепленные на платформах, передвигают по биоморфной траектории в вертикальной плоскости, параллельной направляющим.
6. Способ тренировки пациента при механотерапии нижних конечностей по п.5, отличающийся тем, что нижние конечности пациента фиксируют шиной, накладываемой на внешнюю сторону голени, фиксирующую стопу, голень и коленный сустав.
7.Способ тренировки пациента при механотерапии нижних конечностей по п.5, отличающийся тем, что остановку платформ механических манипуляторов-приводов производят плавно и выводят их в удобное для пациента положение.
8. Способ тренировки пациента при механотерапии нижних конечностей по п.5, отличающийся тем, что движение конечностей пациента производится в режиме имитации преодоления препятствий.
9. Способ тренировки пациента при механотерапии нижних конечностей по п.5, отличающийся тем, что движение конечностей пациента производится в режиме имитации спуска/подъема по лестнице.
| US 4986534 A, 22.01.1991 | |||
| US 20120035028 A1, 09.02.2012 | |||
| US 9381397 B2, 05.07.2016 | |||
| US 3563541 A, 16.02.1971 | |||
| Способ имитации перемещений в виртуальной реальности | 2017 |
|
RU2640439C1 |

