Изобретение относится к измерительной технике и может быть использовано для исследования структуры и параметров потока газа, преимущественно для оперативного определения профиля скорости потока в аэродинамическом эксперименте.
Известны устройства и способы определения скорости V газового потока, которые в качестве датчика первичной информации используют приемник и регистратор полного и статического давлений или термоанемометр (патент RU 2559566 МПК G01P 5/14 опубл. 10.08.2015 Бюл. №22; патент RU 2285244 МПК G01F 1/72, G01P 5/14 опубл. 10.10.2006 Бюл. №28, патент RU 2382367 МПК G01P 5/00 20.02.2010 Бюл. №5).
Основным недостатком подобных устройств является то, что измерение скорости осуществляется одним неподвижным датчиком, и, следовательно, только в одной точке газового потока. Применение множества таких датчиков для исследования пространственного распределения скоростей, как в пограничных зонах, так и в ядре потока, приводит к усложнению измерительной аппаратуры и к ее удорожанию. Кроме того, применение большого количества датчиков может привести к существенному искажению структуры и параметров потока, и, следовательно, к повышенной погрешности измерения скорости потока.
Некоторому повышению информативности эксперимента может способствовать применение многоточечных крестообразных или поворотных гребенок измерения давлений, а также протяженных термоанемометров (патент RU 2018850 МПК G01P 5/12 опубл. 30.08.1994). Однако и их недостаточно, чтобы получить полную информацию о сложном трехмерном течении потока газа вблизи сложных профилей, в пограничном слое.
Для экспериментального исследования трехмерных полей вектора скорости возможно применение панорамных оптических методов, например, PIV (Particle Image Velocimetry) метода измерения. Основным недостатком данного способа является наличие высокой погрешности измерения при сверхзвуковых скоростях потока, где присутствуют скачки уплотнения и области с большими градиентами параметров, а трассирующие частицы - маркеры, ввиду своей инерционности, не успевают их отслеживать с необходимым пространственным и временным разрешением. Подобная задержка отклика частиц на изменение параметров несущей фазы встречается также в турбулентных вихрях при сильно искривленных линиях тока. Так, высокочастотный метод PIV (time resolved PIV) уже при частоте пульсаций скорости газового потока от 300 Гц и более, имеет повышенную погрешность измерения (УДК 533.6.071.082.5 Сравнение методов термоанемометрии и PIV для измерения пульсаций скорости потока газа. Г.Г. Гаджимагомедов, Г.Я. Масленников, Д.С. Сбоев, В.В. Ткаченко. Центральный аэрогидродинамический институт имени профессора Н.Е. Жуковского; Московский физико-технический институт (государственный университет). Поэтому применение панорамных оптических методов затруднено для высокоточных исследований скоростных и сугубо турбулентных потоков, характерных, например, для течений газа в авиационных турбореактивных двигателях, с возможным уровнем частот пульсаций скорости до 100 кГц.
Известен способ измерения скорости потока жидкости и комбинированный приемник скорости (патент RU 2197740 МПК G01P 5/16 опубл. 27.01.2003 Бюл. №3), в котором положение приемника скорости в трехмерном пространстве меняется оператором вручную с помощью координатника и лимба для визуального контроля положения исследуемой точки потока. В качестве приемника скорости используется трубка Пито-Прандтля, напорные линии которой соединены с полостями датчика дифференциального давления, при этом разность полного и статического давлений преобразуется в соответствующий сигнал, по которому из известного уравнения Бернулли определяют скорость потока жидкости.
К существенному недостатку данного аналога относится низкий уровень автоматизации процесса управления и сбора информации, как следствие повышенная погрешность измерения, низкая оперативность и существенная трудоемкость работ, связанные с человеческим фактором при проведении многочисленных измерений, что неизбежно приводит к повышенным материальным затратам на проведение исследований.
Ближайшим аналогом заявляемого технического решения является измерительный комплекс, предназначенный для автоматической регистрации данных о скорости V воздушного потока в исследуемом профиле и предусматривающий автоматическое (программное) перемещение датчика скорости по заданным координатам X, Y и Z пространства аэродинамической трубы (Зверков И.Д. «Экспериментальное исследование отрывного обтекания прямых крыльев с гладкой и волнистой поверхностью при малых числах Рейнольдса». Диссертация на соискание ученой степени кандидата технических наук. 01.02.05 - механика жидкости, газа и плазмы. На правах рукописи. Новосибирск, 2004 г., опубликована на сайте «Библиотека диссертаций dslib.net», ссылка - http.://www.dslib.net/mechanika-sostojanij/jeksperimentalnoe-issledovanie-otryvnogo-obtekanija-prjamyh-krylev-s-gladkoj-i.html).
Автоматизированный измерительный комплекс состоит из следующих блоков, модулей и датчиков:
- персональная ЭВМ (ПЭВМ), которая предназначена для управления ходом эксперимента, в том числе для формирования файлов координат датчика скорости V и выдачи управляющих воздействий в блок управления шаговыми двигателями для позиционирования датчика скорости;
- модуль ввода данных от датчика скорости V потока. Вход модуля соединен с выходом датчика скорости, а выход модуля соединен со входом ПЭВМ;
- блок управления шаговыми двигателями координатного устройства;
- координатное устройство (координатник), предназначенное для перемещения датчика скорости в пространстве аэродинамической трубы. В качестве координатника используются ходовые рейки с шаговыми двигателями по трем координатам X, Y и Z со штангой датчика, расположенной непосредственно вблизи от исследуемого объекта;
- датчик скорости V потока - термоанемометр постоянной температуры типа AN-1003.
Интерфейс ПЭВМ разработан таким образом, что перемещение датчика может производится как ручным способом, так и в автоматическом режиме по любой координате последовательно или одновременно по нескольким координатам X, Y и Z. Координаты точек траектории оператором заранее заносятся в файл. Команда на перемещение датчика по заданным точкам траектории дается из этого файла. Перемещение датчика осуществляется с заранее заданным шагом перемещения ΔS. В выбранной точке дается команда на сбор данных по установленным параметрам.
Выбранный в качестве ближайшего аналога автоматизированный комплекс был создан в Институте теоретической и прикладной механики СО РАН, г. Новосибирск для экспериментального исследования отрывного обтекания прямых крыльев малоразмерных летательных аппаратов.
Основным недостатком ближайшего аналога является повышенные временные, трудовые и материальные затраты при проведении испытаний сугубо прикладного характера и не требующих массовых точечных измерений.
Так, в практике опытно-конструкторских и научно-исследовательских работ возникают ситуации, когда необходимо проведение крупномасштабной серии натурных испытаний по оценке структуры и профилей скоростей потоков в сжатые сроки и с минимальными материальными затратами. Проведение же серии фундаментальных исследований, которые предусматривают только в одном эксперименте свыше 1 млрд. точечных измерений, например, в случае десятка считываний в одной точке, а затем перемещение термоанемометра с шагом 5…10 микрон по координатам X, Y и Z рабочей части аэродинамической трубы для исследования обтекания крупной широкохордной лопатки вентилятора современного авиационного двигателя, делают подобные испытания продолжительными по времени, и следовательно, очень затратными. Материальные затраты на проведение подобных исследований при трансзвуковых и сверхзвуковых скоростях потока становятся особенно высоки.
С другой стороны, при минимизации затрат времени на проведение испытаний путем существенного увеличения шага перемещения ΔS датчика, возможна ситуация, когда окажутся не выявленными и не исследованными малоразмерные зоны с существенным изменением скорости потока или локальный отрыв пограничного слоя, существование которых не удалось предварительно выявить расчетным путем. Возникновение такой ситуации недопустимо.
Важность минимизации затрат времени на проведение испытаний также обусловлено тем, что в результате большой продолжительности аэродинамического эксперимента увеличивается вероятность отклонения от первоначально заданных входных условий и параметров эксперимента (главным образом термогазодинамических параметров потока на входе в аэродинамическую трубу). Это усложняет обработку и интерпретацию полученных экспериментальных данных, может повлиять на их достоверность и сопоставимость.
Кроме того, в реальных условиях испытаний машиностроительной техники, где возможно наличие в потоках мелких посторонних частиц, песка - тонкая металлическая нить термоанемометра не обладает достаточной прочностью. Термоанемометр также имеет ограничения по приведенным скоростям потока (λ=0,4…0,5) в связи с увеличением влияния сжимаемости на точность измерения. Поэтому в качестве датчика скорости потока в ряде случаев предпочтительнее применение трубки Пито-Прандтля.
Техническим результатом заявляемого изобретения является обеспечение необходимого уровня автоматизации, информативности, точности и надежности измерения скорости потока газа с одновременным снижением временных, трудовых и материальных затрат путем диагностирования признака существенного изменения скорости потока и последующего автоматического изменения шага перемещения датчика скорости.
Технический результат достигается в заявляемом устройстве для определения скорости V потока газа, содержащем персональную ЭВМ для приема измеренных экспериментальных данных, формирования файлов координат положения датчика скорости и выдачи управляющих воздействий в блок управления шаговыми двигателями для позиционирования датчика скорости; модуль ввода данных в персональную ЭВМ от датчика скорости потока; блок управления шаговыми двигателями; координатник для перемещения датчика скорости по координатам X, Y и Z с шагом перемещения ΔS; датчик измерения скорости V потока газа, дополнительно в ЭВМ введены блок определения модуля первой производной средней скорости потока ⏐dV/dT⏐, заранее установленное предельное (уставочное) значение (dV/dT)уст, блок сравнения модуля первой производной средней скорости потока с предельным значением (dV/dT)уст, блок генерирования файлов координат датчика скорости с уменьшенной величиной шага перемещения ΔS' (ΔS'<ΔS) в случае, если модуль первой производной средней скорости потока ⏐dV/dT⏐ превысит (dV/dT)уст.
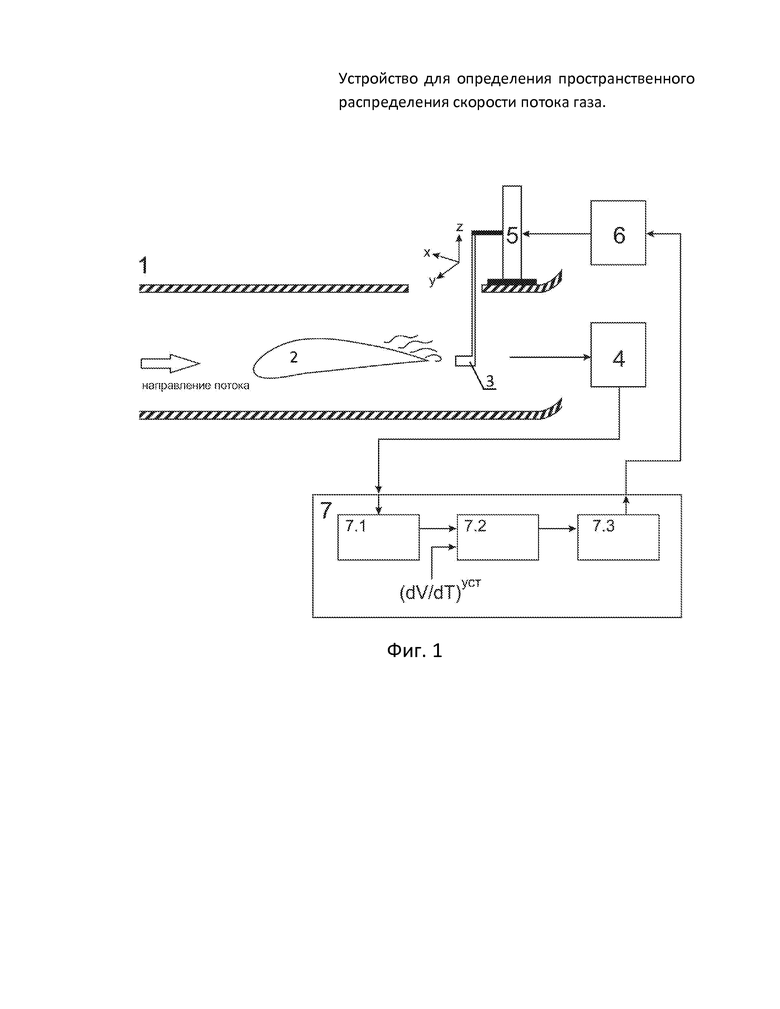
На фиг. 1 изображена структурная схема заявляемого устройства для определения скорости V потока газа.
Элемент 1 представляет собой рабочую часть аэродинамической трубы, в которой размещается исследуемый объект 2, профиль скорости которого подлежит определению.
Блок 3 - датчик скорости V потока, выход которого подается на вход блока 4.
Блок 4 представляет собой модуль ввода данных в персональную ЭВМ от датчика скорости потока. Блок 4 представляет собой типовой аналого-цифровой преобразователь и обеспечивает преобразование выходного сигнала датчика скорости в двоичный цифровой код для обработки в ЭВМ.
Блок 5 представляет собой координатное устройство, предназначенное для перемещения блока 3 (датчика скорости V) в пространстве аэродинамической трубы 1.
Блок 6 представляет собой блок управления шаговыми двигателями координатного устройства. Выход блока 6 соединен с входом блока 5.
Все вышеперечисленные блоки и элементы 1…6 могут быть выполнены аналогично прототипа и их конкретное исполнение не является основной целью изобретения.
Блок 7 - персональная электронно-вычислительная машина (персональный компьютер). ПЭВМ предназначена для управления ходом эксперимента, в т.ч. для формирования файлов координат датчика скорости и выдачи управляющих воздействий в блок управления шаговыми двигателями для позиционирования датчика скорости.
В состав ПЭВМ согласно изобретения дополнительно введены:
- блок 7.1., представляющий собой блок определения модуля первой производной средней скорости V потока. В указанном блоке последовательно выполняется первая типовая математическая операция - определение первой производной по времени средней скорости потока dV/dT на основе фактических измерений скорости V, а затем вторая операция - определение модуля первой производной средней скорости потока ⏐dV/dT⏐. Выход блока определения модуля первой производной средней скорости потока ⏐dV/dT⏐ соединен с входом блока 7.2;
- блок 7.2., представляющий собой блок сравнения модуля первой производной средней скорости потока ⏐dV/dT⏐ с его предельным заранее установленным значением (dV/dT)уст. В случае, если модуль первой производной средней скорости потока ⏐dV/dT⏐ не превышает значение (dV/dT)уст, то на выходе блока формируется дискретный сигнал нулевого уровня «0». В случае, если модуль первой производной средней скорости потока превышает заранее установленное значение, то на выходе блока формируется дискретный сигнал единичного уровня «1». Выход блока сравнения модуля ⏐dV/dT⏐ с его предельным значением (dV/dT)уст соединен с входом блока 7.3;
- блок 7.3, представляющий собой блок генерирования файлов координат датчика скорости с исходной величиной шага перемещения ΔS или с уменьшенной величиной шага перемещения ΔS' (ΔS'<ΔS).
При наличии дискретного сигнала нулевого уровня «0» изменений в заранее сформированной программе перемещения датчика не происходит и осуществляется перемещение датчика с шагом ΔS. Наоборот, в случае наличия на входе блока 7.3 дискретного сигнала единичного уровня «1», то на выходе блока 7.3 генерируется новый файл координат положения датчика скорости с уменьшенной величиной шага перемещения ΔS' (ΔS'<ΔS).
Величина уменьшения и увеличения шага перемещения датчика может быть любой константой и определенной, например, на основе предварительного расчетного моделирования процесса обтекания исследуемого объекта 2. В общем случае величина изменения шага перемещения может быть функцией и носить более сложный, многопараметрический характер.
Величина ΔS' может быть различной для координат X, Z и Y. В случае, если дискретный сигнал единичного уровня «1» сменился на дискретный сигнал нулевого уровня «0», то генерируется новый файл координат положения датчика скорости с исходной величиной шага перемещения ΔS датчика скорости, начиная с позиции исследуемой точки, где ⏐dV/dT⏐<(dV/dT)уст.
В качестве датчика скорости целесообразно применение трубки Пито-Прандтля, напорные линии которой соединены с дифференциальным датчиком давления для определения скорости потока по известным функциям. Сам приемник и регистратор давления имеют высокую надежность и низкую стоимость.
Устройство работает следующим образом. На начальном этапе формируется воздушный поток в следе за исследуемым телом 2, размещенным в аэродинамической трубе 1. На основе заранее установленной программы перемещения, инсталлированной в ПЭВМ 7, и по сигналам ПЭВМ в блоке 6 происходит формирование соответствующего управляющего воздействия в соответствующий шаговый двигатель, при вращении которого происходит перемещение координатника 5 по любой координате последовательно или одновременно по нескольким координатам X, Z и Y при работе нескольких шаговых двигателей.
В результате происходит последовательное изменение положения датчика 3 измерения скорости. Перемещение датчика скорости осуществляется дискретно, с интервалом ΔS, по управляющему воздействию из ПЭВМ на шаговые двигатели через блок управления шаговыми двигателями. В заданной точке рабочего пространства аэродинамической трубы происходит измерение датчиком 3, выходной сигнал которого обрабатывается в модуле 4 ввода данных, выход которого соединен со входом ПЭВМ (блок 7), где и происходит вычисление скорости потока V.
Формула определения скорости потока V не является отличительным признаком (новизной), поэтому в предлагаемом устройстве могут применяться любые известные зависимости.
В блоке 7.1, являющимся частью ПЭВМ (блока 7), осуществляется определение модуля первой производной средней скорости потока ⏐dV/dT⏐, при этом выходной сигнал блока 7.1. подается на вход блока 7.2.
В случае, если при перемещении датчика измерения скорости из одной точки пространства аэродинамической трубы в другую точку, модуль первой производной средней скорости потока ⏐dV/dT⏐ не превышает его предельным значением (dV/dT)уст, то на выходе блока 7.2 сравнения модуля первой производной средней скорости потока ⏐dV/dT⏐ с его предельным значением (dV/dT)уст формируется дискретный сигнал нулевого уровня «0» и продолжается сканирование потока согласно исходному значению шага перемещения ΔS.
В случае, если при перемещении датчика измерения скорости из одной точки в другую модуль первой производной средней скорости потока ⏐dV/dT⏐ превысит его предельное значение (dV/dT)уст, то на выходе блока 7.2 сравнения модуля формируется дискретный сигнал единичного уровня «1».
При наличии дискретного сигнала единичного уровня «1» на выходе блока 7.3 генерируется (формируется) новый файл координат положения датчика скорости с уменьшенной величиной шага перемещения ΔS' (ΔS'<ΔS), например, в два или более раз по сравнению с ΔS. Таким образом, происходит более детальное измерение профиля скорости потока.
В случае, если дискретный сигнал единичного уровня «1» сменился на дискретный сигнал нулевого уровня «0», то на выходе блока 7.3 генерируется новый файл координат положения датчика скорости с увеличенной величиной шага перемещения ΔS датчика скорости, начиная с позиции исследуемой точки, где ⏐dV/dT⏐<(dV/dT)уст. Увеличение шага может быть задано в 2 и более раза по сравнению с текущей величиной шага. Таким образом, минимизируются временные и материальные затраты на исследование профиля скоростей потока газа.
Из понимания общего уровня развития современных измерительных технологий и робототехники возможно конструктивное и функциональное объединение координатника, шагового двигателя в один узел - робот -манипулятор, при этом электронно-вычислительная машина будет дополнительно содержать блок (плату) взаимодействия с роботом-манипулятором.
Таким образом, реализация заявленного устройства позволяет обеспечить высокий уровень автоматизации, информативности, точности и надежности исследований профиля скорости потока с одновременным снижением временных и материальных затрат путем диагностирования признака существенного изменение скорости потока (по первой производной скорости потока по времени dV/dT) и последующего автоматического уменьшения шага перемещения датчика скорости для более детального изучения потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный измерительный комплекс для определения гидрогазодинамических характеристик закрученных потоков в аппаратах с узкими кольцевыми каналами переменного сечения | 2021 |
|
RU2780012C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| Способ измерения линейности скорости и контроля её неравномерности | 2019 |
|
RU2730398C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| Способ измерения акустических пульсаций газового потока | 2018 |
|
RU2697918C1 |
| Датчик скорости потока газа | 1977 |
|
SU613247A1 |
| Способ градуировки датчика термоанемометра | 1986 |
|
SU1538130A1 |
| СПОСОБ ДИСТАНЦИОННОГО ИССЛЕДОВАНИЯ ФУНКЦИИ ДЫХАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2122344C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2002 |
|
RU2204852C1 |
| ЛАЗЕРНЫЙ ГАЗОАНАЛИЗАТОР | 1994 |
|
RU2082960C1 |
Изобретение относится к измерительной технике и может быть использовано для исследования структуры и параметров потока газа, преимущественно для оперативного определения профиля скорости потока газа. Сущность изобретения заключается в том, что устройство для определения пространственного распределения скорости потока газа дополнительно содержит электронно-вычислительную машину, включающую в себя последовательно соединенные блок определения модуля первой производной средней скорости потока ⎪(dV/dT)⎪, блок сравнения модуля первой производной средней скорости потока с его заранее установленным предельным значением (dV/dT)уст, блок генерирования файлов координат датчика скорости с уменьшенной величиной шага перемещения ΔS' (ΔS'<ΔS) в случае, если модуль первой производной средней скорости потока ⎪dV/dT⎪ превысит (dV/dT)уст. Технический результат – повышение точности, надежности, автоматизации и информативности измерения скорости потока газа. 2 з.п. ф-лы, 1 ил.
1. Устройство для определения пространственного распределения скорости потока газа, содержащее электронно-вычислительную машину, модуль ввода данных в электронно-вычислительную машину от датчика скорости V потока; блок управления шаговыми двигателями координатного механизма, координатный механизм с шаговыми двигателями, обеспечивающими перемещение датчика скорости V по координатам X, Z и Y с шагом перемещения ΔS, датчик скорости потока V, при этом вход модуля ввода данных от датчика скорости потока соединен с выходом датчика скорости потока, а выход модуля ввода данных соединен с входом электронно-вычислительной машины, при этом выход электронно-вычислительной машины соединен с блоком управления шаговыми двигателями, отличающееся тем, что электронно-вычислительная машина дополнительно содержит последовательно соединенные блок определения модуля первой производной средней скорости потока ⎪(dV/dT)⎪, блок сравнения модуля первой производной средней скорости потока с его заранее установленным предельным значением (dV/dT)уст, блок генерирования файлов координат датчика скорости с уменьшенной величиной шага перемещения ΔS' (ΔS'<ΔS) в случае, если модуль первой производной средней скорости потока ⎪dV/dT⎪ превысит (dV/dT)уст.
2. Устройство по п. 1, где в качестве датчика измерения скорости потока газа используют трубку Пито-Прандтля, напорные линии которой соединены с дифференциальным датчиком давления или термоанемометром.
3. Устройство по п. 1, отличающееся тем, что в качестве блока управления шаговыми двигателями и координатного механизма с шаговыми моторами применяют робот-манипулятор, а электронно-вычислительная машина дополнительно содержит блок (плату) взаимодействия с роботом-манипулятором.
| Зверков И.Д | |||
| "Экспериментальное исследование отрывного обтекания прямых крыльев с гладкой и волнистой поверхностью при малых числах Рейнольдса" | |||
| Диссертация на соискание ученой степени кандидата технических наук | |||
| Новосибирск, 2004 г | |||
| ТЕРМОАНЕМОМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2018850C1 |
| Способ изготовления скорости газа или жидкости | 1989 |
|
SU1659865A1 |
| US 6687626 B2, 03.02.2004. | |||

