Изобретение относится к области измерительной техники и может быть использовано для точного измерения малых линейных скоростей перемещения объектов, а также для оценки отклонения скорости от заданного значения.
В различных технологических процессах и установках иногда необходимо осуществлять перемещение объектов с заданной малой постоянной линейной скоростью. Для выполнения этой задачи необходимо контролировать степень отклонения текущей скорости от заданной постоянной и по возможности устранять причины этих отклонений.
В частности, способ может быть использован для контроля равномерности перемещения водорастворимых элементов при нанесении покрытий и создания тонких пленок путем равномерного погружения (извлечения) этих элементов в раствор с постоянной малой линейной скоростью.
По авторскому свидетельству SU 36680, МПК G01P 3/38, известен способ контроля равномерности движения. На образец наносят метки через строго одинаковые расстояния. При этом на контролируемом объекте при его перемещении наносят ряд меток через строго одинаковые промежутки времени. Затем сравнивают положения меток на объекте и образце и делают вывод о равномерности перемещения контролируемого объекта.
Также известен способ автоматического контроля и регулирования малых скоростей, использующий эффекты Месбауэра и Доплера (SU 159336, МПК G01P 5/10). В этом способе измеряют расстройку от резонанса, появляющуюся при доплеровском смещении линий в результате перемещения источника излучения относительно поглотителя. Способ позволяет бесконтактно и непрерывно измерять весьма малые скорости, вплоть до долей микрона в секунду.
Известен способ измерения скорости движения объекта (SU 1739297, G01P 3/64, публ. 07.06.1992 г.), в котором измеряют линейную скорость объекта при перемещении его по заданной траектории. Вдоль всей траектории перемещения объекта устанавливают датчики. Затем определяют значение скорости в месте установки датчика, измеряя время взаимодействия объекта и датчика. Параллельно фиксируют время прохождения объектом всей траектории перемещения.
Недостатком всех вышеперечисленных способов измерения линейной скорости является невозможность определить степень неравномерности скорости движения объекта. Кроме того, невозможно определить источники, причины этих неравномерностей, и, соответственно, устранить их.
Задачей, на решение которой направлено настоящее изобретение, является разработка способа измерения малой линейной скорости, позволяющего также определить степень неравномерности скорости движения объекта путем анализа скорости его движения на всем пути, и выявить источники и причины этих неравномерностей, а затем на основе полученных данных максимально приблизить скорость объекта к требуемой (постоянной) величине.
Поставленная задача достигается тем, что разработанный способ включает в себя следующие этапы: первый этап, на котором задают требуемую постоянную скорость перемещения объекта вдоль прямой и измеряют координаты объекта через равные промежутки времени, задаваемые микроконтроллером. Далее вычисляют значения мгновенной скорости Vi за каждый заданный промежуток времени и затем усредняют полученные значения мгновенных скоростей Vi, используя метод скользящего окна, причем величину окна w выбирают экспериментально. Получают усредненные значения мгновенных скоростей Vi(t), после чего, используя эти значения Vi(t), вычисляют девиацию скорости на требуемых участках пути движения объекта для первичной оценки неравномерности измеряемой линейной скорости. На втором этапе обрабатывают изначально полученные данные (значения мгновенной скорости Vi) с помощью преобразования Фурье, в итоге получают спектр частот изменений мгновенной скорости Vi. После чего анализируют полученный спектр и делают вывод о причинах возникающих неоднородностей скорости и по возможности устраняют источники возникновения обнаруженных неравномерностей, стремясь максимально приблизить скорость объекта к требуемой (постоянной) величине. На третьем этапе повторяют действия, выполняемые на первом этапе, и дополнительно сравнивают вновь вычисленное значение девиации скорости с предыдущим, оценивают эффективность выполненной корректировки. При необходимости повторяют второй и третий этапы.
Предлагаемое изобретение поясняется следующими фигурами.
На фиг. 1 представлен общий вид устройства для линейного перемещения объекта с малой линейной скоростью.
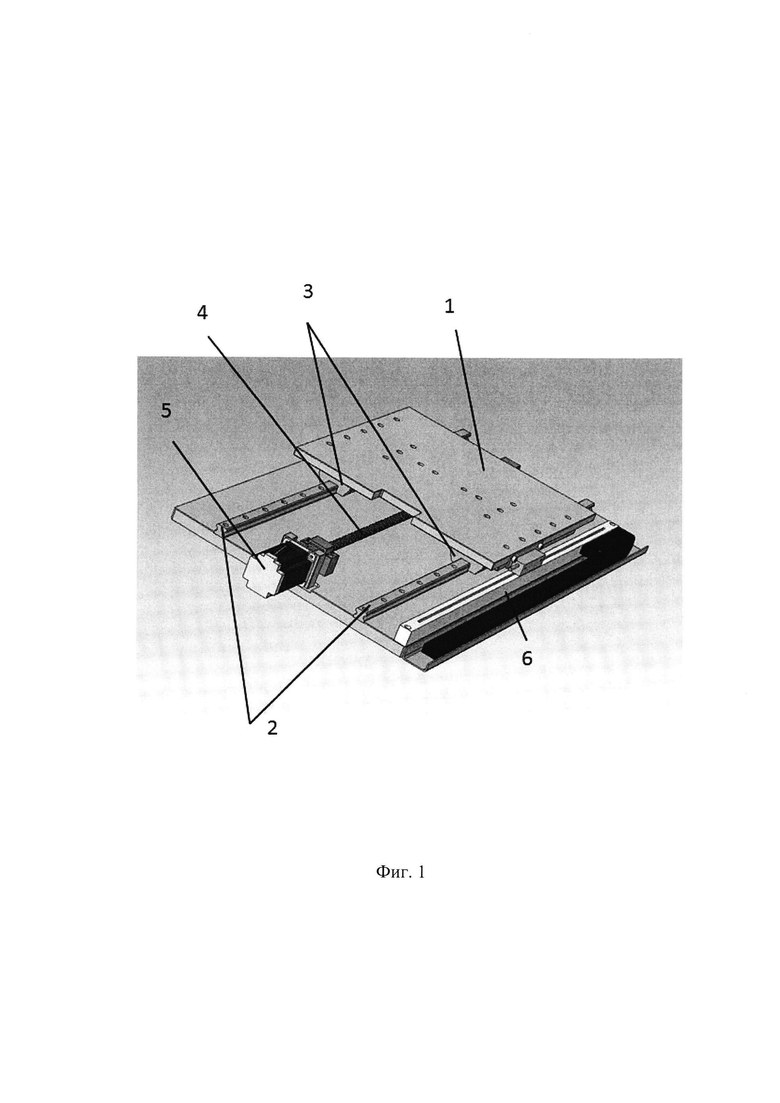
На фиг. 2 представлены графики зависимости полученных значений мгновенной скорости от времени: а) - без усреднения, б) - с усреднением по 500 точкам, в) -начальный участок движения (укрупнено), г) - конечный участок движения (укрупнено).
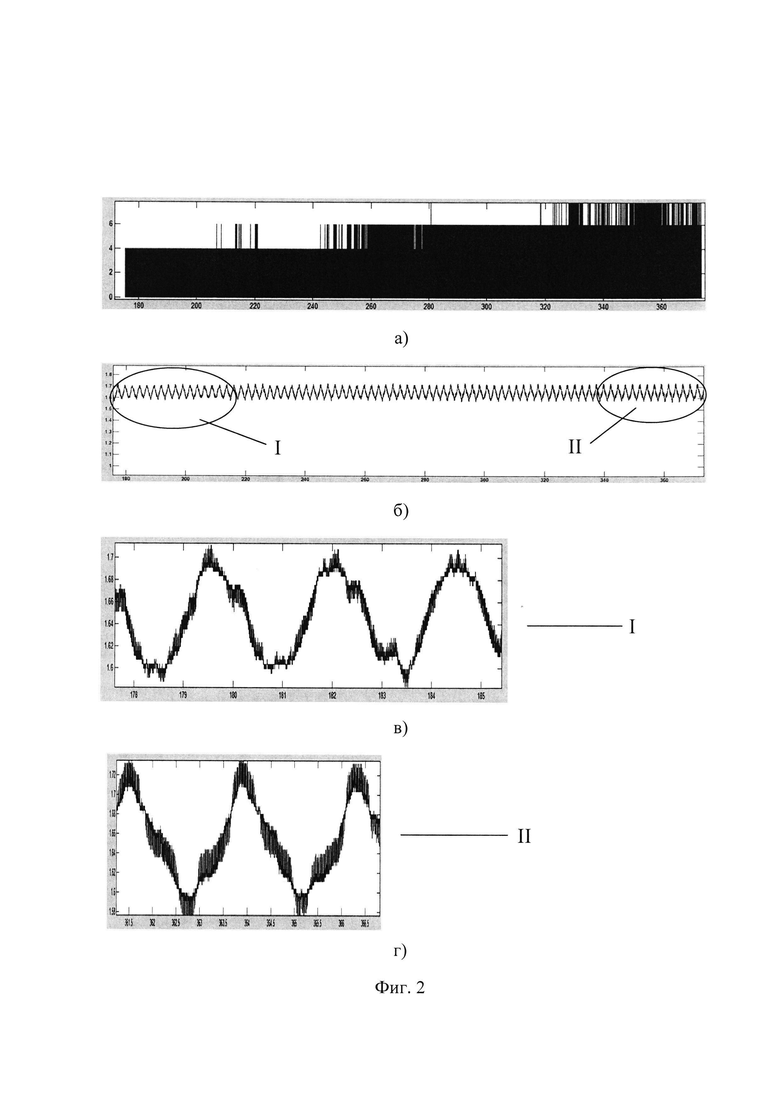
На фиг. 3 представлен спектр скорости: а) - отрезок для частот от 0 до 300 Гц, б) -отрезок для частот от 0 до 4,5 Гц.
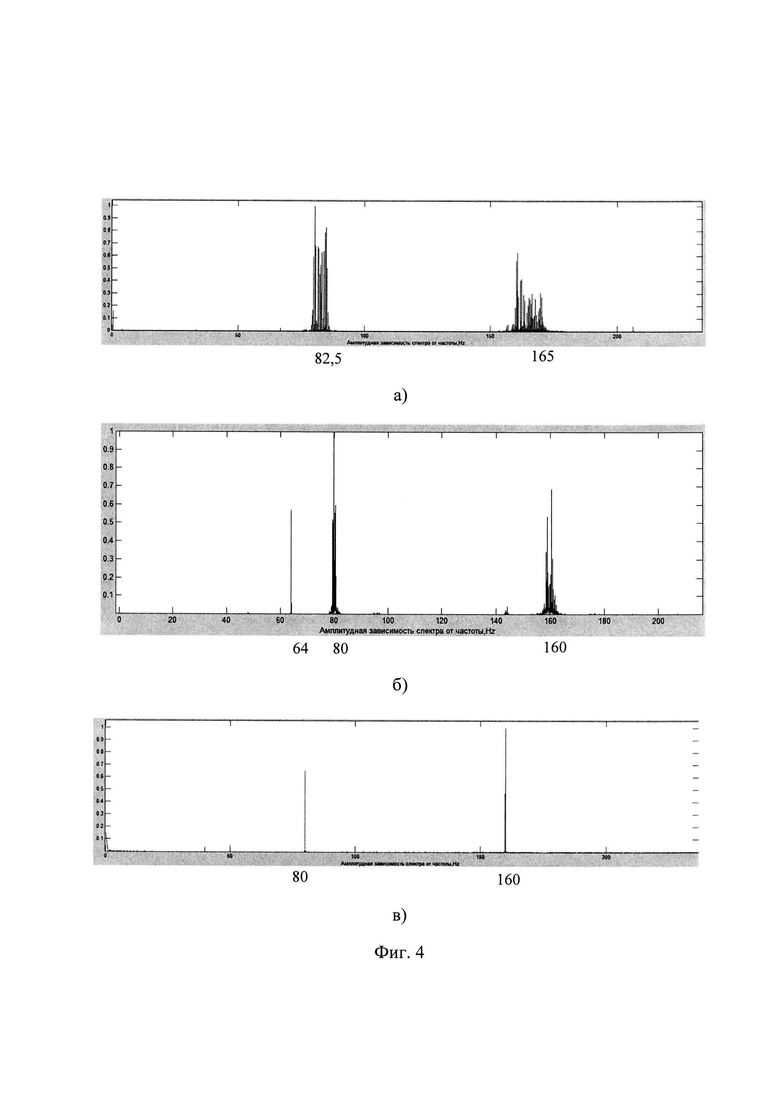
На фиг. 4 представлены спектры скоростей для трех разных систем линейного перемещения.
Для реализации заявленного способа (см. фиг. 1) изначально задают требуемую постоянную скорость перемещения платформы 1 (объекта), в примере конкретной реализации эта скорость составляла 1,65 мм/с. В конструкцию устройства для линейного перемещения платформы 1 входят рельсы 2 с каретками 3, привод перемещения 4, шаговый двигатель (ШД) 5 с планетарным редуктором (на фигуре не показан). Для измерения координат платформы 1, которое осуществлялось через равные промежутки времени, применялась оптическая линейка 6 серии DC-11 соответствующей длины. У данной серии линеек 6 дискретизация координаты (разрешение) составляет 1 микрон. Для анализа данных с оптической линейки 6 был использован микроконтроллер «Speedometer» с соответствующим программным обеспечением. В микроконтроллере «Speedometer» собственный кварцевый генератор частоты формирует свое, независимое от компьютерных прерываний, время. Один раз в 500 микросекунд (2000 раз в секунду) микроконтроллер опрашивает и записывает в буфер значение координаты с оптической линейки 6. Далее осуществляют передачу данных по интерфейсу USB в компьютер, в котором программный блок «Speedometer» записывает время и координаты в файл формата csv для дальнейшего анализа. На основе полученных данных вычисляют значения мгновенной скорости Vi за каждый заданный промежуток времени, то есть получают 2000 значений мгновенной скорости в секунду. График зависимости полученных значений мгновенной скорости Vi от времени представлен на фиг. 2а.
Так как дискретизация используемой оптической линейки 6 составляет ΔS=1 мкм, а измерения проводят с интервалом времени Δt=0,0005 с, то измеренные значения скорости Vi будут кратны величине  то есть ΔV=2 мм/с. Таким образом, мгновенные значения Vi за каждый заданный промежуток времени могут меняться с интервалом, кратным 2 мм/с. Чтобы получить реальную скорость перемещения объекта, необходимо провести усреднение. Поэтому далее проводят обработку полученных значений мгновенных скоростей Vi, используя метод скользящего окна. Величину окна w выбирают экспериментально. В конкретной реализации способа оптимальным оказалось значение w=500. Получают усредненные значения мгновенных скоростей Vi(t), на основе которых строят новый график зависимости этих значений от времени (см. фиг. 2б). Видно, что скорость имеет периодический характер, в котором выделяются как низкие частоты, так и высокие. Для оценки неравномерности измеряемой линейной скорости вычисляют ее девиацию, причем делают это на требуемых участках перемещения платформы 1.
то есть ΔV=2 мм/с. Таким образом, мгновенные значения Vi за каждый заданный промежуток времени могут меняться с интервалом, кратным 2 мм/с. Чтобы получить реальную скорость перемещения объекта, необходимо провести усреднение. Поэтому далее проводят обработку полученных значений мгновенных скоростей Vi, используя метод скользящего окна. Величину окна w выбирают экспериментально. В конкретной реализации способа оптимальным оказалось значение w=500. Получают усредненные значения мгновенных скоростей Vi(t), на основе которых строят новый график зависимости этих значений от времени (см. фиг. 2б). Видно, что скорость имеет периодический характер, в котором выделяются как низкие частоты, так и высокие. Для оценки неравномерности измеряемой линейной скорости вычисляют ее девиацию, причем делают это на требуемых участках перемещения платформы 1.
DeV=(Vmax - Vmin) / Усредн,
где Dev - девиации скорости на оцениваемом участке перемещения,
Vmax - максимальная скорость на оцениваемом участке перемещения,
Vmin - минимальная скорость на оцениваемом участке перемещения,
Vсредн - вычисленная средняя скорость на оцениваемом участке перемещения.
В конкретном случае реализации способа, учитывая конструкцию устройства перемещения, в основе которого лежит система вал - гайка, контроль неравномерности (вычисление девиации) необходим как минимум на начальном I и конечном II участках пути движения платформы 1 (см. фиг. 2в и фиг. 2г). Для нормальной работы механической системы, обеспечивающей перемещение платформы 1 (фиг. 1), необходим свободный ход, но в то же время из-за этого в системе неизбежно присутствуют источники вибраций. Период девиации скорости совпадает с частотой вращения ходового вала. Так как интенсивность вибрации увеличивается от начальной точки перемещения платформы 1 к конечной (см. фиг. 2б-г), то и девиация скорости, как показатель неравномерности, будет отличаться на начальном I и конечном II участках. Величина девиации скорости вначале составила 6%, и она нарастает к концу перемещения до 7,4%. Это происходит из-за того, что в системе перемещения существует ряд «тонких мест», таких как соединения валов двигателя 5, редуктора и ходового вала, которые имеют между собой угловые и/или радиальные несоосности. Например, соединение шагового двигателя 5 и понижающего планетарного редуктора осуществляют жестко с помощью продольно разрезанной втулки. Данное соединение зажимают одним винтом, соответственно, все сочленение уведено в сторону на величину упругости элементов (валов, корпусных элементов, подшипников). Соответственно, в данном соединении сила упругости системы в определенных углах дает сопротивление вращению, в других углах она ускоряет вращение.
На фиг. 2 в-г видны усредненные значения мгновенной скорости Vi(t), состоящей из медленно меняющейся средней скорости движения платформы 1 и быстрой виброскорости, накладывающейся на среднюю. Для большинства потребителей величина малых отклонений скорости неважна в их задачах по перемещению объекта. Однако в некоторых случаях (в системах прецизионного позиционирования в станках алмазного микрофрезерования, в установках по нанесению покрытий на водорастворимые элементы и др.) предъявляются повышенные требования к плавности и равномерности хода устройств перемещения в технологических процессах, характеризующихся сравнительно малыми скоростями около 1,5-2 мм в секунду.
Если значение вычисленной девиации оказывается неудовлетворительным (слишком большим) для задач прецизионного перемещения объекта, то выявляют источники и причины возникновения «повышенной» неравномерности измеренной линейной скорости. С помощью преобразования Фурье получают спектр частот изменений мгновенной скорости Vi и анализируют полученный спектр (см. фиг. 3а и фиг. 3б). Если рассматривать процесс с частотно-временной точки зрения, значения мгновенной скорости Vi, взятые через время 500 мкс, согласно теореме Котельникова позволяют получить и проанализировать ее спектр с верхним пределом частоты в 1 кГц. Для данной задачи такое значение верхнего предела вполне достаточно, так как все механические резонансы находятся в области частот меньше 200 Гц. С нижней границей частоты таких ограничений нет.
Вибрация может быть вызвана как внешними по отношению к устройству перемещения источниками, так и внутренними, каждый из которых в полученном спектре представлен соответствующими компонентами. Вибрация представляет собой в общем случае гармонические колебания какой-то механической системы. Внутренними источниками вибрации являются активные в смысле механики элементы установки -двигатели, подшипники, каретки перемещения. Направление максимального вибросмещения зависит от многих факторов. В представленном случае анализируют данные с одной координаты перемещения, то есть рассматривают проекции вибросмещения или виброскорости на одну выделенную координату.
Система привода перемещения 4 типа вал-гайка имеет неоднородность скорости, вызванную несоосностью соединенных деталей (валов двигателя 5, редуктора и ходового вала), и такие малые отклонения скорости неизменно повторяются на всем промежутке движения. Поэтому в спектре скорости будет компонента с частотой, равной частоте вращения этих соединений. Соответственно, в спектре скорости устройства перемещения будут представлены компоненты, соответствующие как свойствам (дефектам) самой системы, так и влиянию внешних источников вибрации (ее проекции на ось перемещения).
На фиг. 3а представлен спектр скорости на частотах до 300 Гц, на котором присутствуют компоненты со средними частотами 0,413 Гц, 4,13 Гц, 82,5 Гц, 165 Гц, 247,5 Гц.
Анализ более высокочастотной части спектра скорости позволяет определить источники вибрации системы. В представленном случае «гудят» опорные узлы -каретки. Для данного типа кареток в спектре присутствует множество компонент, которые группируются вокруг частот fn=n⋅A⋅V,
где n - целое число: 1,2,3…,
А=50, - коэффициент, характерный для данного типа опор HIWIN, [1/мм],
V - скорость каретки, [мм/с].
Таким образом, f1=82,5 Гц, f2=165 Гц, f3=247,5 Гц для случая V=1,65 мм/с.
На фиг. 3б отдельно показан участок наиболее низкочастотной области спектра от 0 до 4,5 Гц, на котором присутствуют компоненты со средними частотами 0,413 Гц (частота вращения приводного вала) и 4,13 Гц (частота вращения вала ШД5 перед понижающим планетарным редуктором (1:10)).
Для измерения линейной скорости по предложенному способу последовательно рассматривались и сравнивались три устройства линейного перемещения с разными типами механической системы, обеспечивающей движение.
В первом случае система устроена следующим образом: на опорной поверхности размещены рельсы 2 с каретками 3 (производства HIWIN), привод перемещения 4 представляет собой стальной вал с капролоновой гайкой, соединенный с шаговым двигателем 5 типа FL57 (NEMA 23 или ISM-7402E) через разрезную втулку. Измеренная девиация скорости в данной системе составила 6÷7,4%, при этом скорость перемещения составляла 1,65 мм/с.
Во втором случае реализации механической системы, обеспечивающей движение, привод перемещения 4 был выполнен на основе вала с шарико-винтовой передачей (ШВП), который присоединялся к двигателю через понижающий редуктор (1:10). Такое решение позволило понизить девиацию скорости перемещения до 3÷4%.
В третьем случае в системе использован линейный шаговый двигатель 5 (ЛШД), что позволило получить девиацию скорости в основном менее 0,5%. Во втором и третьем случаях скорость перемещения составляла 1,6 мм/с.
На фиг. 4 представлены части спектра для трех вышеописанных механических систем с разными приводами перемещения, но использующих одинаковые направляющие HIWIN и осуществляющих перемещение платформы 1 с вышеуказанными скоростями: а) для системы вал с капролоновой гайкой, б) для системы вал - ШВП, в) для системы с линейным двигателем.
Величина девиации однозначно связана с количеством компонент в спектре, сосредоточенных около частот fn. Так как величина девиации для первого вида механической системы составила 6÷7,4%, то на фиг. 4 а видно множество компонент, сосредоточенных вокруг частот 82,5 Гц и 165 Гц.
Для системы с ШВП девиация скорости составила 3÷4%, что почти в два раза меньше, чем для первой системы. Поэтому и количество спектральных компонент вокруг частот 80 Гц и 160 Гц значительно меньше (фиг 4.б). Также на спектре появляется компонента на fШВП=64 Гц. Эта компонента появляется из-за вибрации, вносимой шарико-винтовой передачей (ШВП), поэтому ее нет на спектрах других систем. fШВП=0,8⋅A⋅V,
где А=50 [1/мм], V=1,6 [мм/с].
То, что она узкая говорит о том, что входное движение (вращение) на нее приходит с минимальными отклонениями в системе ШД - гибкая муфта, а в девиацию скорости основной вклад вносит система ШВП (вал с резьбой и гайка с шариками на валу).
На фиг. 4 в показан спектр для системы Direct drive, и видны те же компоненты спектра на частотах 80 Гц и 160 Гц, но они очень «узкие» по сравнению с компонентами на предыдущих спектрах, поскольку девиация для третьей системы составила менее 0,5%.
Таким образом, разработанный способ позволяет получить данные, на основе которых можно сделать вывод, что из рассмотренных трех систем лучшими характеристиками обладает система, использующая привод типа линейного шагового двигателя (ЛШД или direct drive).
Кроме того, возможно применение разработанного способа измерения линейной скорости и контроля ее неравномерности для выявления источника / причины неравномерности скорости перемещения (износ, дефект деталей, неточность соединения деталей) внутри одного устройства. Для этого выполняют действия, описанные в разработанном способе, то есть вычисляют девиацию и анализируют спектр, после чего принимают решение о необходимости разборки системы и проведения дефектовки деталей или компенсации неточности соединения деталей.
Например, в устройстве линейного перемещения (по фиг. 1) было выявлено, что основной вклад в неравномерность движения вносит несоосность соединения при передаче вращения двигателя во вращение приводного вала. Для компенсации существующих угловых и/или радиальных несоосностей была применена упругая муфта с определенным, подбираемым углом наклона. Для этого в центральный разрез стандартной разрезной муфты добавляют регулируемый элемент.
Таким образом, разработанный способ позволяет измерить линейную скорость объекта и определить степень ее неравномерности, а также позволяет выявить источники и причины неравномерности скорости, и на основе полученных данных максимально приблизить скорость объекта к требуемой (постоянной) величине.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРЕЗЕРНЫЙ СТАНОК | 2019 |
|
RU2705482C1 |
| СПОСОБ ДИАГНОСТИКИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2497451C1 |
| Способ и система определения скорости локомотива и направления движения | 2023 |
|
RU2808863C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ДЛЯ СИСТЕМЫ АКТИВНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ АТАКУЮЩИХ БОЕПРИПАСОВ | 2022 |
|
RU2792312C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| СПОСОБ СТАБИЛОМЕТРИЧЕСКОГО ИССЛЕДОВАНИЯ ДВИГАТЕЛЬНОЙ СТРАТЕГИИ ЧЕЛОВЕКА | 2011 |
|
RU2456920C9 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
Изобретение относится к области измерительной техники и может быть использовано для точного измерения малых линейных скоростей перемещения объектов, а также для оценки отклонения скорости от заданного значения. Предложенный способ измерения линейной скорости и контроля ее неравномерности включает три этапа: 1) задают требуемую постоянную скорость перемещения объекта вдоль прямой, измеряют координаты объекта через равные промежутки времени, задаваемые микроконтроллером, вычисляют значения мгновенной скорости Vi за каждый заданный промежуток времени, усредняют полученные значения мгновенных скоростей Vi, используя метод скользящего окна, причем величину окна выбирают экспериментально, получают усредненные значения мгновенных скоростей Vi(t) и, используя эти значения Vi(t), вычисляют девиацию скорости на требуемых участках пути движения объекта для оценки неравномерности измеряемой линейной скорости; 2) с помощью преобразования Фурье получают спектр частот изменений мгновенной скорости Vi и анализируют его, затем по возможности устраняют источники и причины возникновения неравномерности измеренной линейной скорости; 3) повторяют действия, выполняемые на первом этапе, и дополнительно сравнивают вновь вычисленное значение девиации скорости с предыдущим, при необходимости повторяют второй и третий этапы. Предложенный способ позволяет измерить линейную скорость объекта и определить степень ее неравномерности. 4 ил.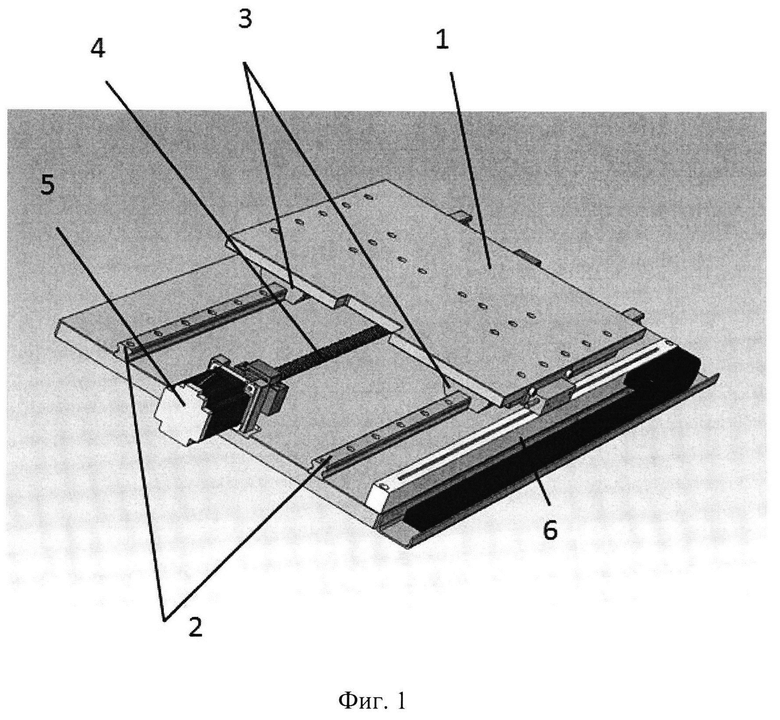
Способ измерения линейной скорости и контроля ее неравномерности, включающий следующие этапы: на первом этапе задают требуемую постоянную скорость перемещения объекта вдоль прямой, измеряют координаты объекта через равные промежутки времени, задаваемые микроконтроллером, вычисляют значения мгновенной скорости Vi за каждый заданный промежуток времени, затем усредняют полученные значения мгновенных скоростей Vi, используя метод скользящего окна, причем величину окна выбирают экспериментально, получают усредненные значения мгновенных скоростей Vi(t), после чего, используя эти значения Vi(t), вычисляют девиацию скорости на требуемых участках пути движения объекта для оценки неравномерности измеряемой линейной скорости, на втором этапе с помощью преобразования Фурье получают спектр частот изменений мгновенной скорости Vi и анализируют его, затем по возможности устраняют источники и причины возникновения неравномерности измеренной линейной скорости, на третьем этапе повторяют действия, выполняемые на первом этапе, и дополнительно сравнивают вновь вычисленное значение девиации скорости с предыдущим, при необходимости повторяют второй и третий этапы.
| Способ измерения линейной скорости объекта и оптико-волоконный измеритель линейной скорости | 1982 |
|
SU1075814A1 |
| 0 |
|
SU156007A1 | |
| FR 2976355 B1, 21.06.2013 | |||
| US 8183854 B2, 22.05.2012 | |||
| CN 206411137 U, 15.08.2017. | |||

