ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Раскрыты системы и способы генерирования интуитивных тактильных предупреждений. В некоторых вариантах выполнения носимый предмет, такой как умные часы, генерирует эти тактильные предупреждения, основываясь на событиях вождения. Эти тактильные предупреждения повышают безопасность водителя.
УРОВЕНЬ ТЕХНИКИ
[0002] Умные носимые устройства, такие как Apple Watch®, выполнены с возможностью вибрировать на запястье пользователя. Умное носимое устройство часто выполнено с возможностью вибрировать в ответ на ряд событий. Например, Apple Watch® выполнены с возможностью вибрировать при обнаружении входящего звонка, текстового сообщения или электронного письма. Эти виды предупреждений называются тактильными предупреждениями, так как они привлекают внимание пользователя с помощью чувства осязания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В различных вариантах выполнения настоящее изобретение относится к системе интуитивных тактильных предупреждений, включающей в себя процессор(ы), находящий(ие)ся в оперативной связи с первым транспортным средством и выполненный(ые) с возможностью: идентификации второго транспортного средства; проектирования последовательности виртуальных волн, исходящих от второго транспортного средства на частоте источника, оценки наблюдаемых частот виртуальных волн на первом транспортном средстве в соответствии с эффектом Доплера и генерирования последовательности команд для тактильного мотора, основываясь на оцененных наблюдаемых частотах.
[0004] В различных вариантах выполнения настоящее изобретение относится к системе интуитивных тактильных предупреждений, включающей в себя процессор(ы), находящий(ие)ся в оперативной связи с транспортным средством и выполненный(ые) с возможностью: проектирования шумовых(ой) зон(ы) на дороге; определения того, когда транспортное средство занимает эту(и) зону(ы); генерирования последовательности команд для тактильного мотора, основываясь на: определенном событии занятия и принятой скорости транспортного средства.
Предлагается система интуитивных тактильных предупреждений, содержащая процессор(ы), находящий(ие)ся в оперативной связи с транспортным средством и выполненный(ые) с возможностью: проектирования шумовых(ой) зон(ы) на дороге; определения того, когда транспортное средство занимает эту(и) зону(ы); генерирования последовательности команд для тактильного мотора, основываясь на: определенном событии занятия и принятой скорости транспортного средства. Причем процессор(ы) выполнен(ы) с возможностью: генерирования последовательности команд, основываясь на обнаруженном отсутствии сигнала поворота транспортного средства. Причем проектируемая шумовая(ые) зона(ы) включае(ю)т в себя последовательность проектируемых выемок, имеющих длину «a», причем последовательные выемки отделены промежутком, имеющим длину «b». Причем каждая команда включает в себя время включения двигателя в паре со временем выключения двигателя. Причем время включения двигателя=«a»/(принятая скорость транспортного средства в момент времени X). Причем время выключения двигателя=«b»/(принятая скорость транспортного средства в момент времени X). Причем a:b=7:5. Причем процессор(ы) выполнен(ы) с возможностью генерировать последовательность на основе наборов условий; причем набор условий для зоны, проектируемой на границе полос движения отличается от набора условий для зоны, проектируемой на границе дороги. Причем процессор(ы) выполнен(ы) с возможностью различения неидентичных последовательных команд по меньшей мере на заданное значение. Причем процессор(ы) выполнен(ы) с возможностью выполнения программы калибровки, которая устанавливает заданное значение. Причем процессор(ы) выполнен(ы) с возможностью проектирования зон(ы) по границам дороги и границам полос движения и изменения команд на основе оцененной степени проникновения транспортного средства в проектируемые зоны. Причем транспортное средство представляет собой первое транспортное средство, и процессор(ы) выполнен(ы) с возможностью: обнаружения второго транспортного средства, находящегося впереди первого транспортного средства; проектирования шумовых(ой) зон(ы) по дороге между первым транспортным средством и вторым транспортным средством. Причем процессор(ы) выполнен(ы) с возможностью: проектирования по меньшей мере одной из множества шумовых зон по дороге между первым транспортным средством и вторым транспортным средством. Причем проектируемая шумовая(ые) зона(ы) включае(ю)т в себя последовательность проектируемых выемок, имеющих длину «a», причем последовательные выемки отделены промежутком, имеющим длину «b». Причем процессор(ы) выполнен(ы) с возможностью: установления отношения a:b для каждой из зон на основе расстояния между указанной зоной и указанным вторым транспортным средством. Причем процессор(ы) выполнен(ы) с возможностью: увеличения a/b, когда первое транспортное средство приближается ко второму транспортному средству.
Также предлагается система интуитивных тактильных предупреждений, содержащая процессор(ы), находящий(ие)ся в оперативной связи с первым транспортным средством и выполненный(ые) с возможностью: идентификации второго транспортного средства; проектирования последовательности виртуальных волн, исходящих от второго транспортного средства на частоте источника, оценки наблюдаемых частот виртуальных волн на первом транспортном средстве в соответствии с эффектом Доплера и генерирования последовательности команд для тактильного мотора, основываясь на оцененных наблюдаемых частотах. Причем процессор(ы) выполнен(ы) с возможностью генерировать последовательность команд для тактильного мотора на основе: (a) измеренных скоростей первого транспортного средства и второго транспортного средства, (b) заданной скорости волн. Причем процессор(ы) выполнен(ы) с возможностью проектирования последовательности виртуальных волн на основе расстояния между первым транспортным средством и вторым транспортным средством. Причем процессор(ы) выполнен(ы) с возможностью определения того, когда второе транспортное средство входит в слепую зону первого транспортного средства, и, основываясь на указанном определении, когда начинать проектирование.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах не обязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых случаях пропорции могут быть преувеличены, чтобы подчеркнуть и ясно проиллюстрировать новые признаки, описанные в данном документе. В дополнение, компоненты системы могут быть размещены по-разному, как известно в уровне техники. Дополнительно, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на нескольких видах.
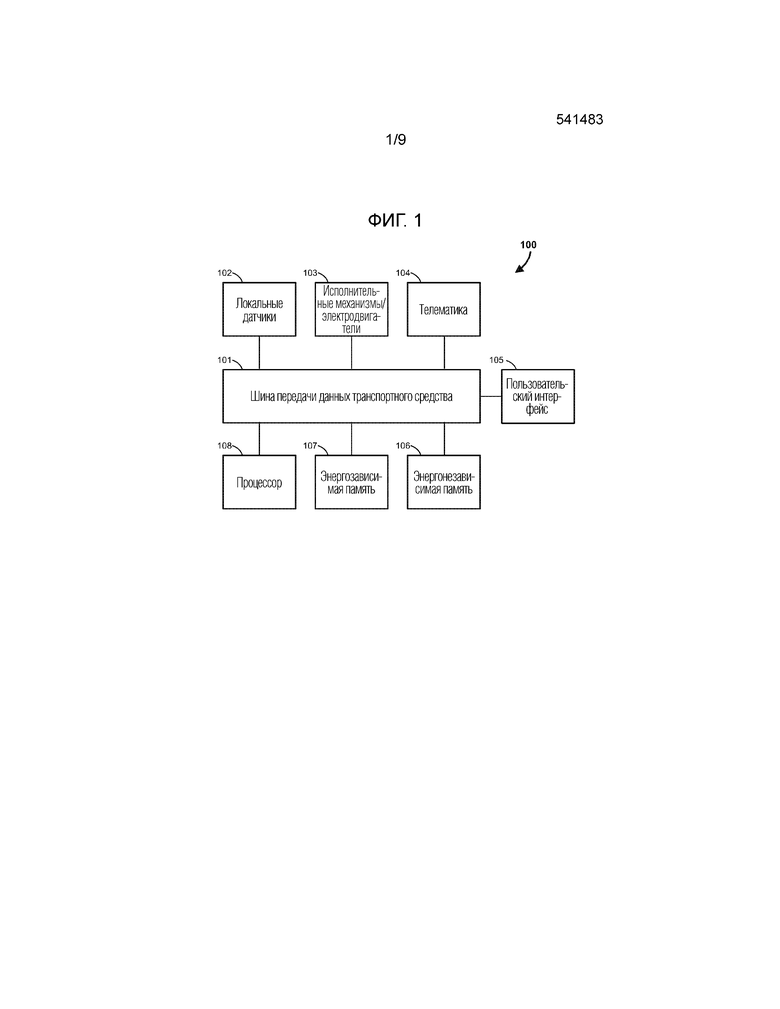
[0006] Фигура 1 представляет собой блок-схему вычислительной системы для транспортного средства.
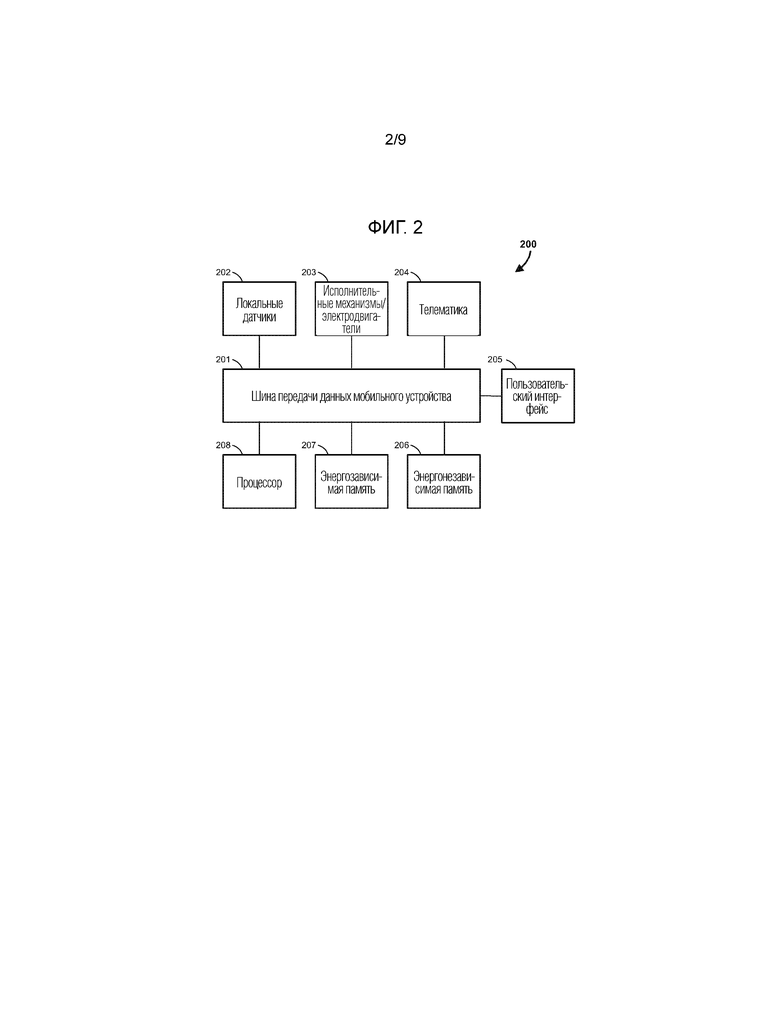
[0007] Фигура 2 представляет собой блок-схему вычислительной системы для умного носимого устройства.
[0008] Фигура 3 представляет собой случай использования тактильной обратной связи.
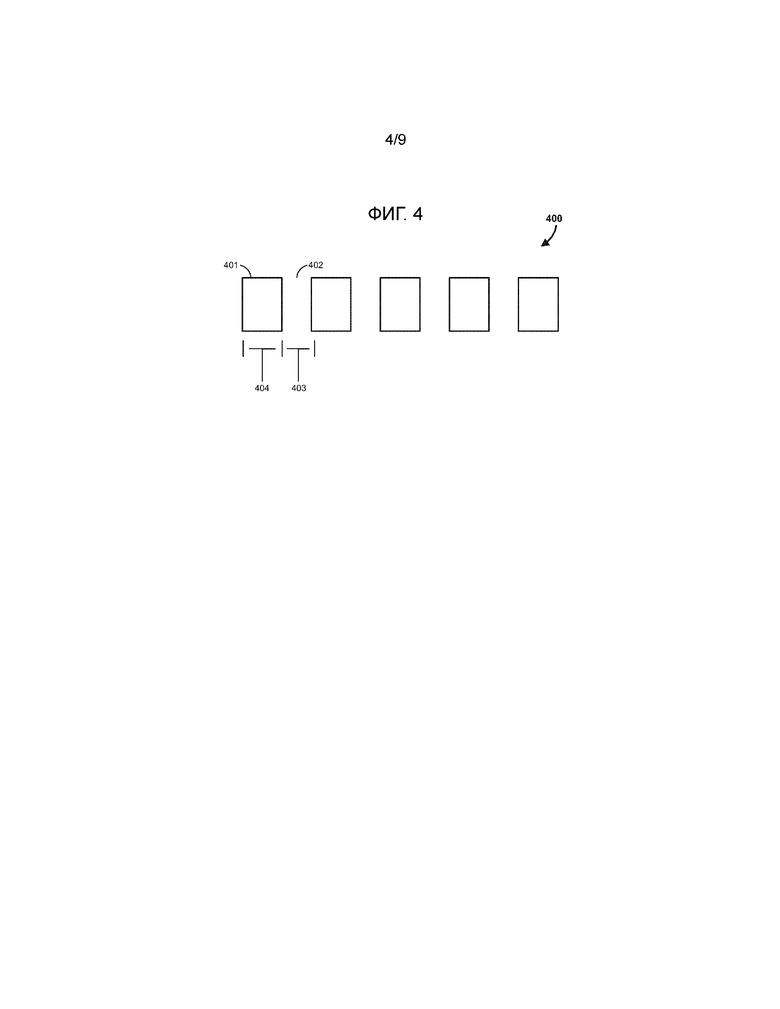
[0009] Фигура 4 представляет собой шумовую зону с множеством шумовых полос. Главная или продольная ось шумовой зоны будет параллельна главной или продольной оси дороги.
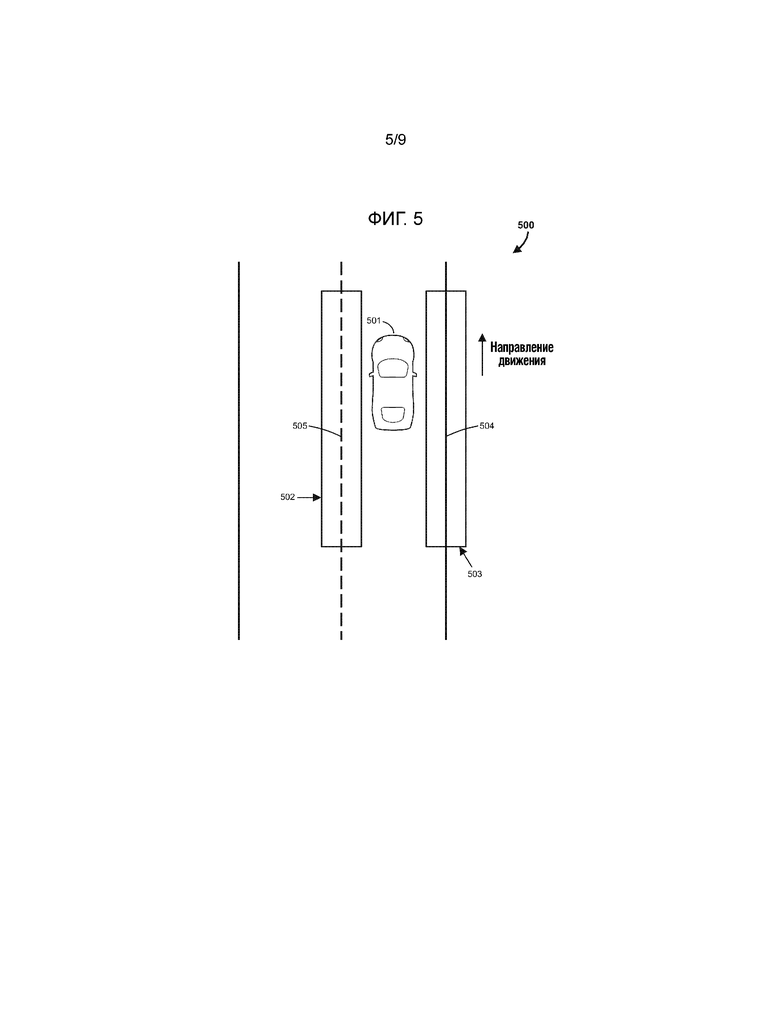
[0010] Фигура 5 представляет собой случай использования тактильной обратной связи.
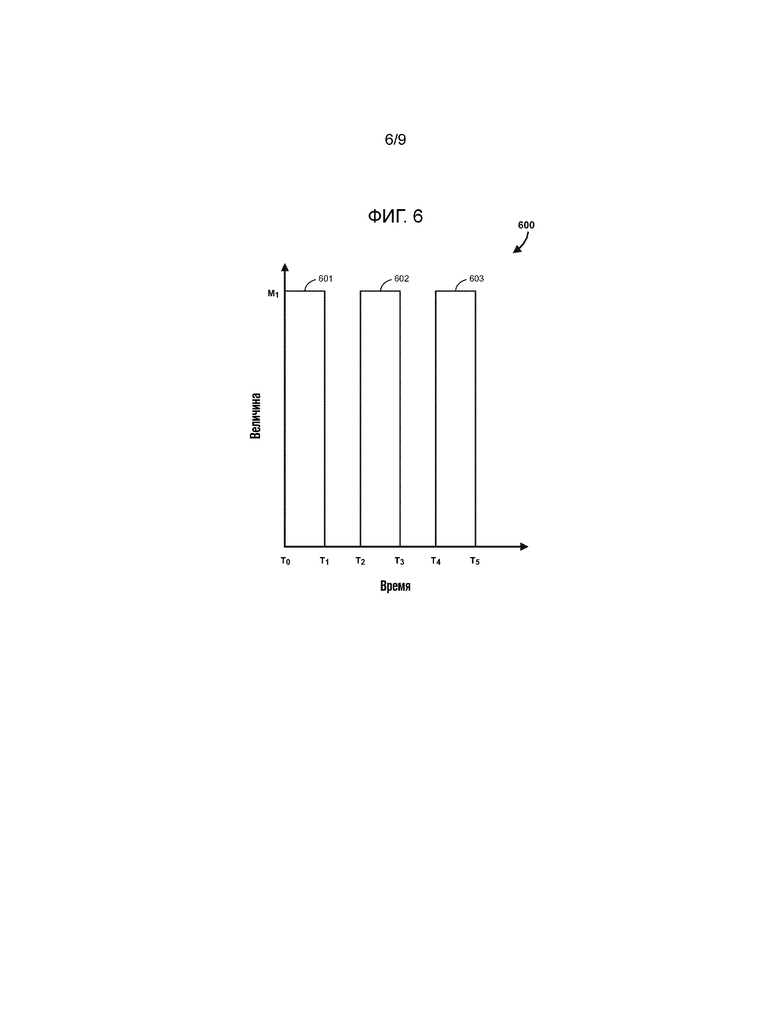
[0011] Фигура 6 представляет собой график зависимости величины от времени моделей тактильной обратной связи.
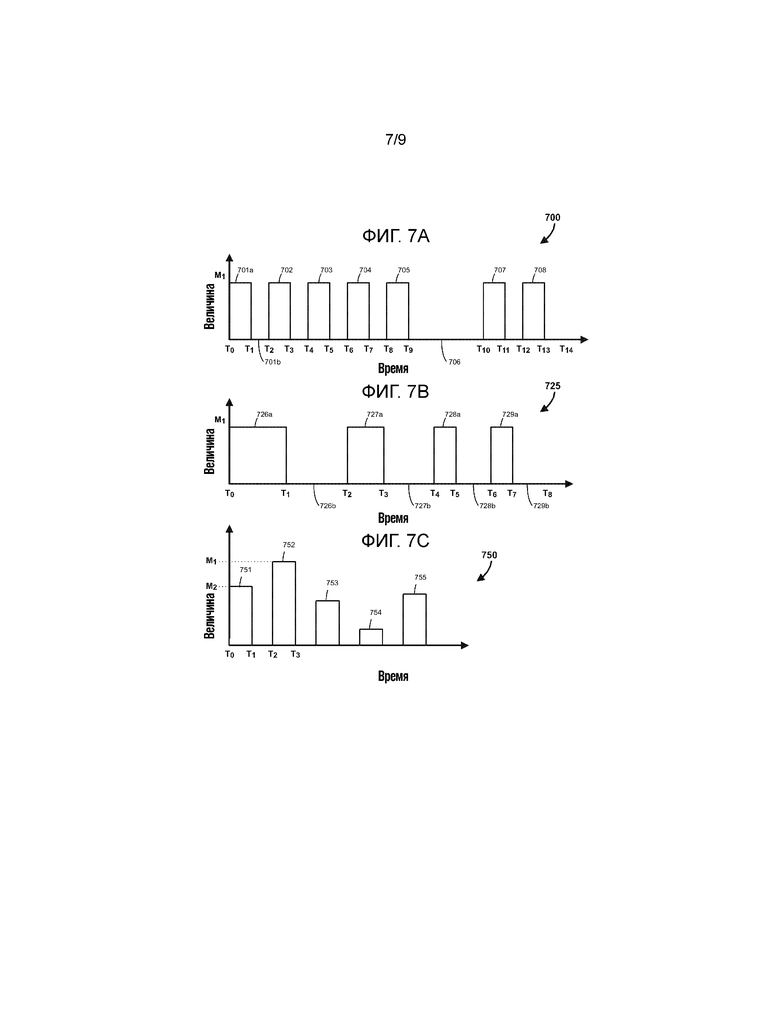
[0012] Фигуры 7а-7c представляют собой графики зависимости величины от времени моделей тактильной обратной связи.
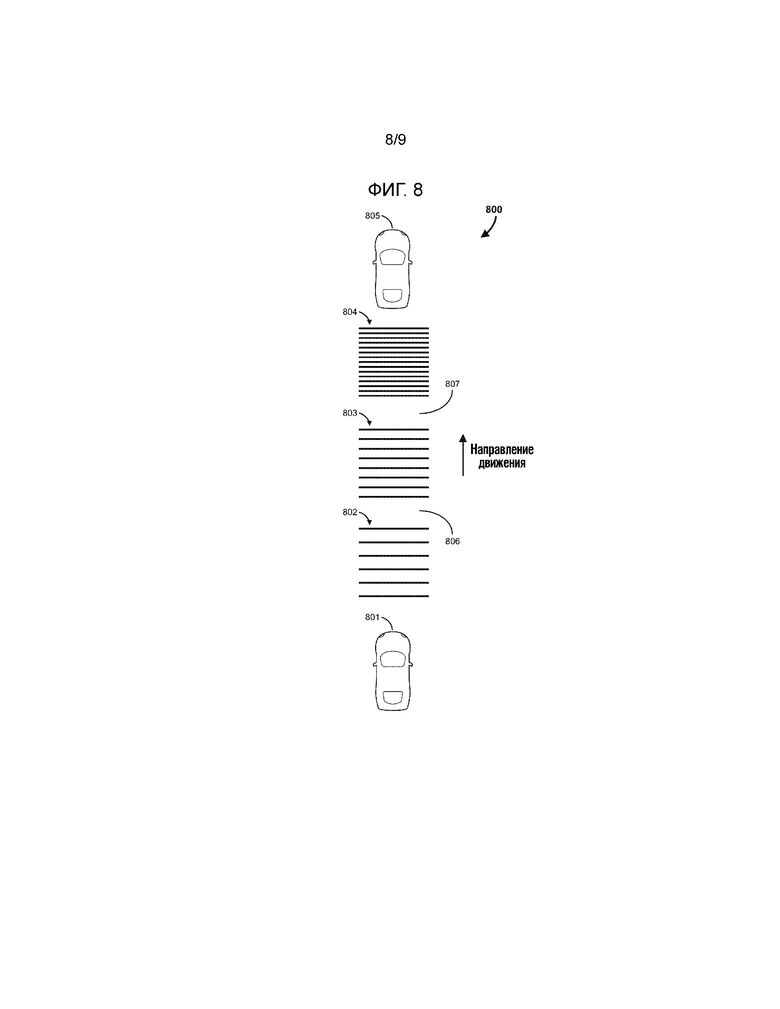
[0013] Фигура 8 представляет собой случай использования тактильной обратной связи.
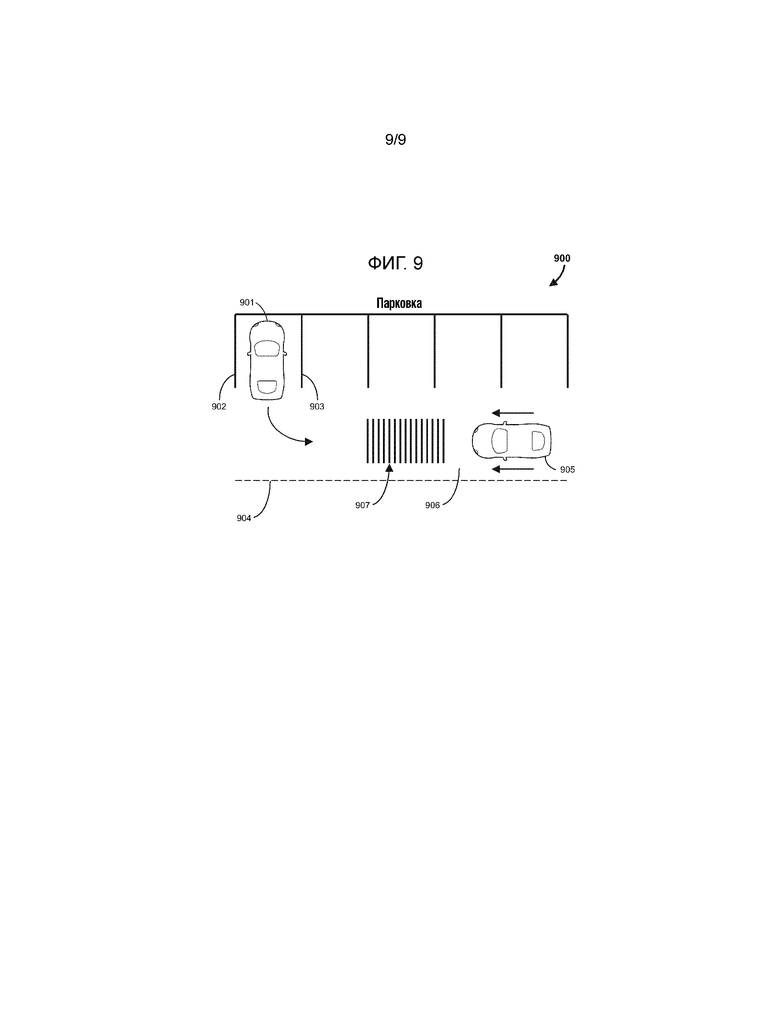
[0014] Фигура 9 представляет собой случай использования тактильной обратной связи.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0015] Хотя изобретение может быть осуществлено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты выполнения с пониманием того, что настоящее раскрытие следует рассматривать как иллюстрацию изобретения и не предназначено для ограничения изобретения определенными проиллюстрированными вариантами выполнения.
[0016] В этой заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование определенных или неопределенных артиклей не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Дополнительно, союз «или» может быть использован для передачи одновременно присутствующих признаков, а не взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать как подразумевающий значение «и/или».
[0017] Фигура 1 показывает вычислительную систему 100 примерного транспортного средства. Транспортное средство включает в себя двигатель, аккумулятор, по меньшей мере одно колесо, приводимое в движение двигателем, и систему рулевого управления, выполненную с возможностью поворота по меньшей мере одного колеса вокруг оси. Подходящие транспортные средства также описаны, например, в заявке на патент США № 14/991,496, которая включена в настоящее описание путем ссылки во всей ее полноте. Вычислительная система 100 обеспечивает автоматическое управление механическими системами в устройстве. Она также обеспечивает связь с внешними устройствами. Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательские интерфейсы 105, блок 104 телематики, исполнительные механизмы и электродвигатели 103 и локальные датчики 102.
[0018] Шина 101 данных передает электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными для получения измененных электронных сигналов или данных. Энергозависимая память 107 хранит данные для непосредственного вызова процессором 108. Энергонезависимая память 106 хранит данные для вызова в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя ряд энергонезависимых запоминающих устройств, включая жесткие диски, SSD, DVD, Blu-Ray и т.д. Пользовательский интерфейс 105 включает в себя дисплеи, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые позволяют пользователю взаимодействовать с вычислительной системой. Блок 104 телематики обеспечивает как проводную, так и беспроводную связь с внешними процессорами с помощью Bluetooth, сотовых данных (например, 3G, LTE), USB, и т.д. Исполнительные механизмы/электродвигатели 103 производят физические действия. Примеры исполнительных механизмов/электродвигателей включают в себя топливные форсунки, стеклоочистители, передачи, подушки безопасности, тактильные моторы или двигатели и т.д. Локальные датчики 102 передают цифровые показания или измерения на процессор 108. Примеры подходящих датчиков включают в себя температурные датчики, датчики поворота, датчики ремней безопасности, датчики скорости, камеры, лидарные датчики, радиолокационные датчики и т.д. Следует понимать, что различные соединенные компоненты на Фигуре 1 могут включать в себя отдельные или специализированные процессоры и память. Более подробно конструкция и операции вычислительной системы 100 описаны, например, в заявке на патент США № 14/991,496.
[0019] Фигура 2 показывает вычислительную систему 200 умного носимого устройства. Умное носимое устройство может быть умными часами с регулируемым ремешком, который надевается на руку или запястье пользователя, и перезаряжаемым литий-ионным аккумулятором. Вычислительная система 200 умного носимого устройства функционирует подобно вычислительной системе 100 транспортного средства. Вышеприведенное раскрытие, связанное с компонентами 101-108 вычислительной системы 100, применяется к соответствующим компонентам 201-208 вычислительной системы 200. Следует понимать, что носимое устройство включает в себя датчик 202 акселерометра и тактильный мотор или двигатель 203.
[0020] Тактильный мотор выполнен с возможностью приведения в движение или колебания массы. Колебание массы вызывает вибрации. Колебание может включать в себя скольжение массы взад и вперед вдоль продольного паза. Колебание может включать в себя поворот или вращение асимметричной массы. Примерные тактильные моторы или двигатели описаны во введении к Haptic Feedback by Precision MicrodrivesTM, которое включено в настоящее описание путем ссылки во всей своей полноте.
[0021] Следует понимать, что транспортное средство и умное носимое устройство могут быть выполнены с возможностью выполнения способов и операций, описанных ниже. В некоторых случаях транспортное средство и умное носимое устройство выполнены с возможностью выполнения этих функций с помощью компьютерных программ, хранящихся на различных энергозависимых или энергонезависимых устройствах памяти вычислительных систем 100 и 200. Другими словами, процессор может быть выполнен с возможностью выполнения раскрытой операции, когда он находится в оперативной связи с памятью, хранящей программное обеспечение с кодом или инструкциями, воплощающими раскрытую операцию. Дополнительное описание того, как взаимодействуют процессор, запоминающие устройства и программы, приведено в заявке на патент США № 14/991,496.
[0022] Фигуры 3-9 относятся к примерным применениям или случаям использования тактильного двигателя носимого устройства с транспортным средством. Конкретнее, Фигуры 3-9 иллюстрируют случаи, когда носимое устройство получает информацию от транспортного средства, затем генерирует одно или более тактильных предупреждений или тактильных моделей с учетом полученной информации.
[0023] Со ссылкой на Фигуру 3 первое транспортное средство 301 связывается с носимым устройством (не показано), закрепленным с помощью ремешка на водителе. Первое транспортное средство 301 движется в том же направлении, что и транспортное средство 302, по улице или шоссе. Первое транспортное средство 301 находится на полосе 306 движения. Второе транспортное средство 302 находится на полосе 305 движения. Первое транспортное средство 301 имеет слепую зону 307, образованную между линиями 303 и 304. Участок рамы, такой как стойка, первого транспортного средства 301 обычно мешает обзору водителя, приводя к слепой зоне 307. Первое транспортное средство 301 включает в себя датчики слепой зоны и программы слепой зоны (т.е. модуль слепой зоны). Модуль слепой зоны обнаруживает, когда внешнее транспортное средство, такое как второе транспортное средство 302, занимает участок слепой зоны 307. В этот момент модуль слепой зоны будет обнаруживать присутствие второго транспортного средства 302 в слепой зоне 307. Haptic Blind Spot Alert System под авторством Christopher Nebolsky, которая включена в настоящее описание путем ссылки во всей своей полноте, описывает примерные программы и датчики слепой зоны.
[0024] Первое транспортное средство 301 также включает в себя датчики дальности и программы дальности, выполненные с возможностью связи или взаимодействия с программами слепой зоны. Датчики выполнены с возможностью обнаружения или измерения расстояния до внешних транспортных средств в пределах диапазона чувствительности первого транспортного средства 301. Программы дальности выполнены с возможностью преобразования обнаружений или измерений датчиков дальности в свойства, которые связаны с внешними транспортными средствами. В данном случае датчики и программы дальности взаимодействуют для оценки местоположения, скорости и ускорения второго транспортного средства 302. Заявка на патент США № 14/991,496 включает в себя примерные программы и датчики дальности.
[0025] Тактильная программа, расположенная на первом транспортном средстве 301 или умном носимом устройстве, выполнена с возможностью взаимодействия с программами слепой зоны и программами дальности. Тактильная программа выполнена с возможностью генерирования инструкций (или заставляет другую программу генерировать инструкции) для тактильного двигателя. Эти инструкции могут включать в себя величину тактильной обратной связи и временной расчет тактильной обратной связи для создания модели тактильной обратной связи. Фигуры 6 и 7а-7c включают в себя примерные модели тактильной обратной связи.
[0026] В некоторых вариантах выполнения тактильный двигатель является бинарным по величине (т.е. может производить только состояния включения и выключения, а не переменные состояния). В этих вариантах выполнения инструкции включают в себя или относятся к последовательности периодов включения мотора и к последовательности периодов выключения мотора. Например, эти инструкции могут быть представлены в следующей матрице: [включено 30 миллисекунд, выключено 15 мс, включено 2 секунды, выключено 3 секунды и т.д.]. Эта матрица будет вызывать генерирование тактильным двигателем на умном носимом устройстве следующей тактильной модели: вибрация в течение 30 мс, пауза 15 мс, генерирование вибрации в течение 2 секунд, пауза 3 секунды и т.д.
[0027] Если мотор может производить обратную связь различной величины, то инструкции могут быть представлены в следующей матрице: [включено 30 мс при скорости 5 мотора; выключено 15 мс; включено 2 секунды при начальной скорости 6 мотора, уменьшение скорости мотора на 10% каждые 20 мс; выключено 3 секунды]. Designing an Effective Vibration-Based Notification Interface for Mobile Phones под авторством Bahadhor Saket и др. и Tactile Simulations and Wheel Rotation Responses: Toward Augmented Lane Departure Warning systems под авторством Boris Burle и др., оба из которых включены в настоящее описание путем ссылки во всей их полноте, описывают модели тактильной обратной связи.
[0028] Как упомянуто выше, это изобретение включает в себя матрицы с периодами включения и периодами выключения. Следует понимать, что в некоторых применениях периоды выключения могут предшествовать периодам включения. Другими словами, модель с матрицей [10 мс включено, 10 мс выключено] может быть альтернативно представлена с матрицей [10 мс выключено, 10 мс включено]. Таким образом, в применениях и случаях использования, обсуждаемых ниже, каждое «включено» может быть заменено на «выключено», и каждое «выключено» может быть заменено на «включено».
[0029] Со ссылкой на Фигуру 3 тактильная программа выполнена с возможностью генерирования тактильных инструкций/тактильной обратной связи (называемых тактильной обратной связью, но, как отмечено выше, они могут быть инструкциями для другой программы для получения тактильной обратной связи) с учетом программы слепой зоны и программы дальности. Конкретнее, тактильная программа выполнена с возможностью генерирования интуитивной тактильной обратной связи, имитирующей эффект Доплера.
[0030] Эффект Доплера (также известный как Доплеровское смещение) представляет собой изменение частоты сигнала из-за движения наблюдателя сигнала относительно источника сигнала. Представьте полицейский автомобиль с включенной сиреной. Полицейский автомобиль (т.е. источник) генерирует сигнал сирены при постоянной частоте. Сирена представляет собой звуковую волну. Человек стоит на месте на улице. В первый момент времени полицейский автомобиль неподвижен, и человек воспринимает сирену на первой частоте. Во второй момент времени полицейский автомобиль едет по направлению к человеку и производит тот же самый сигнал сирены. Однако теперь человек воспринимает сирену на второй более высокой частоте, так как расстояние между последовательными волнами сирены сокращается из-за движения полицейского автомобиля. В третий момент времени полицейский автомобиль проходит мимо человека и уезжает в сторону от человека. Полицейский автомобиль производит тот же самый сигнал сирены. Однако теперь человек воспринимает сирену на третьей более низкой частоте, так как движение полицейского автомобиля увеличивает расстояние между последовательными сиренами.
[0031] Эффект Доплера является известным явлением и объясняется, например, в статье Википедии об эффекте Доплера от 11 Апреля 2016 г., которая включена в настоящее описание путем ссылки во всей своей полноте. Следующее уравнение представляет отношение между наблюдаемой частотой и излучаемой частотой: f=fo×(c+vr)/(c+vs). В этом уравнении f - наблюдаемая частота; fo - излучаемая частота; c - скорость волн; vr - скорость наблюдателя относительно среды, которая является положительной, если наблюдатель движется по направлению к источнику; vs - скорость источника относительно среды, которая является положительной, если источник движется в сторону от приемника.
[0032] Если vs и vr являются небольшими относительно c, то следующее уравнение представляет приблизительное отношение между наблюдаемой частотой и излучаемой частотой: f-fo=fo×(vr-vs)/c. В этот момент разность (vr-vs) является положительной, когда наблюдатель и источник движутся друг к другу. Следует понимать, что, когда формула изобретения включает в себя выражение «эффект Доплера», формула изобретения рассматривает и охватывает либо полный эффект Доплера, либо приблизительный эффект Доплера.
[0033] Сущность настоящего изобретения заключается в том, что приведенные выше уравнения могут быть применены для получения моделей интуитивной тактильной обратной связи. Конкретнее, f определяется как частота мнимой излучаемой волны внешнего транспортного средства, такого как второе транспортное средство 302. Например, второе транспортное средство 302 может быть изображено как передающее сигнал сирены полицейского автомобиля (звуковую волну). Это значение f предопределено, хотя оно может корректироваться пользователем. В свою очередь, fo - наблюдаемая частота мнимой сирены на первом транспортном средстве 301. vs - скорость второго транспортного средства 302. vr - скорость первого транспортного средства 301. Постоянная c также предопределена, и она может корректироваться пользователем. В случае мнимой сирены она будет известной скоростью звуковых волн.
[0034] Тактильная программа выполнена с возможностью генерирования тактильной обратной связи с учетом этих уравнений. Конкретнее, тактильная программа выполнена с возможностью генерирования сигнала обратной связи с определенной частотой. Определенная частота может быть представлена с точки зрения времени включения и времени выключения. Например, тактильный сигнал с частотой 50 Гц будет представлен следующей матрицей: [включено 10 мс; выключено 10 мс]. Конкретнее, частота 50 Гц передает, что тактильный сигнал имеет такой размер, чтобы позволять повторение ровно 50 раз в секунду. Одна секунда включает в себя 1000 мс. Таким образом, один тактильный сигнал частотой 50Гц должен иметь длительность 1000 мс/50=20 мс. Деление 20 мс на две равные части обеспечивает включение в течение 10 мс и выключение в течение 10 мс (т.е. 10 мс+10 мс=20 мс). В качестве другого примера, тактильный сигнал с частотой 10 Гц будет представлен следующей матрицей: [включено 50 мс; выключено 50 мс]. Далее тактильная программа может применять измеренные переменные (например, измеренные скорости, сообщаемые датчиками) и предопределенные или заданные константы для генерирования новых тактильных сигналов. Как обсуждалось ранее, заданные константы включают в себя fo и c. Измеренные переменные включают в себя vs и vr. f - выход уравнения.
[0035] Когда отношение между первым и вторым транспортными средствами 301 и 302 удовлетворяет одному или более условиям, тактильная программа начинает генерировать тактильные сигналы. Одним из условий может быть вхождение второго транспортного средства 302 в слепую зону 307 первого транспортного средства 301. Одним из условий может быть нахождение второго транспортного средства 302 на заданном или меньшем расстоянии от первого транспортного средства 301. Заданное расстояние может быть измерено по диагонали от первого транспортного средства 301 до второго транспортного средства 302 или с помощью линии, перпендикулярной плоскости, образующей заднюю поверхность первого транспортного средства 301, и плоскости, образующей переднюю поверхность второго транспортного средства 302 (т.е. продольное расстояние между транспортными средствами, измеренное параллельно дороге). Одним из условий может быть наличие у второго транспортного средства заданной или большей скорости на заданном или меньшем расстоянии. В различных вариантах выполнения заданная скорость является любой скоростью, превышающей скорость первого транспортного средства 301. Одним из условий может быть отношение полос движения транспортных средств, так что тактильная программа производит тактильную обратную связь только тогда, когда первое и второе транспортные средства 301 и 302 находятся на различных и непосредственно соседних полосах движения. Одно из условий может заключаться в том, что второе транспортное средство 302 находится позади первого транспортного средства 301. Одно из условий может заключаться в том, что первое транспортное средство 301 имеет активный сигнал поворота в направлении полосы движения, занимаемой вторым транспортным средством (например, включен левый сигнал поворота первого транспортного средства 301, и второе транспортное средство 302 находится на полосе движения непосредственно слева от первого транспортного средства 301). Как и при всех условиях, обсуждаемых в данном документе, следует понимать, что некоторые или все перечисленные выше условия могут требоваться одновременно. Условия (включая другие условия, раскрытые ниже) могут быть повторно оценены с заданной частотой цикла. В связи с этим модели тактильной обратной связи могут прекращаться, когда условия больше не существуют.
[0036] Когда условия удовлетворены, тактильная программа производит следующую тактильную обратную связь: [включено 1/(2fo1); выключено 1/(2fo1); включено 1/(2fo2); выключено (1/2fo2); выключено (1/2fon); выключено (1/2fon) и т.д.]. Нижние индексы, такие как 1, 2 и n, представляет новые вычисления fo, выполняемые с обновленной информацией о скорости.
[0037] Следует понимать, что в некоторых вариантах выполнения может быть желательно интегрировать относительное расстояние между транспортными средствами 301 и 302 в качестве переменной при генерировании тактильной обратной связи. В этих вариантах выполнения разность (vr-vs) может представлять скорость изменения относительного расстояния между транспортными средствами (относительное расстояние может быть диагональным или перпендикулярным расстоянием, как обсуждалось выше). В некоторых вариантах выполнения разность (vr-vs) заменяется функцией, представляющей относительное расстояние между транспортными средствами (например, (положение транспортного средства 1)- (положение транспортного средства 2)).
[0038] В некоторых вариантах выполнения, когда тактильный двигатель выполнен с возможностью производства тактильной обратной связи переменной величины, расстояние между двумя транспортными средствами может быть представлено с точки зрения величины тактильной обратной связи, и частота сигнала тактильной обратной связи вычисляется в соответствии с относительной частотой транспортных средств, как описано выше. В этих вариантах выполнения тактильная обратная связь имеет большую величину, когда расстояние между транспортными средствами 301 и 302 является небольшим.
[0039] В некоторых вариантах выполнения тактильная программа может быть выполнена с возможностью генерирования упрощенного эффекта Доплера. Следует отметить, что переменные, обсуждаемые ниже, имеют синтаксис, отличающийся от синтаксиса переменных, обсуждаемые выше. В этих вариантах выполнения задана начальная тактильная частота, задана конечная тактильная частота, и задана минимальная предельная разница частот между последовательными сигналами обратной связи. Как обсуждалось выше, следует понимать, что полный или целый тактильный сигнал включает в себя интервал включения и интервал выключения.
[0040] Здесь частота тактильных сигналов зависит от измеренного расстояния Dn (по диагонали или перпендикулярно) между первым транспортным средством 301 и вторым транспортным средством 302. Do - начальное расстояние между транспортными средствами 301 и 302. Начальное расстояние Do соответствует времени, когда программа тактильной обратной связи начинает генерирование сигналов. Когда условия (обсуждаемые ранее) выполнены, тактильная программа начинает генерирование тактильной обратной связи на заданной начальной тактильной частоте Fx. Частоты Fn новых тактильных сигналов зависят от заново измеренных или обнаруженных расстояний между первым транспортным средством 301 и вторым транспортным средством 302. В некоторых вариантах выполнения соблюдается следующее соотношение: Fn=Fx×(Do/Dn). Тактильная программа производит следующую матрицу тактильной обратной связи: [включено 1/(2Fx); выключено 1/(2Fx); включено 1/(2Fn); выключено 1/(2Fn) и т.д.]. В других вариантах выполнения соблюдается следующее соотношение: Fn=Fx+Fx×(Do/Dn). В некоторых вариантах выполнения Fn не соблюдает приведенное выше соотношение, но все же является функцией от Fx, Dn и Do.
[0041] Приведенные выше способы рассматривают один тактильный сигнал, поровну разделяемый на интервал включения и интервал выключения. В некоторых вариантах выполнения тактильный сигнал может занимать только один из интервала включения и интервала выключения. Это позволяет тактильной программе быстрее обрабатывать обновления расстояний. Представьте, например, четыре тактильных сигнала. Как обсуждалось выше, каждый тактильный сигнал вычисляется в соответствии с обновляемой размерной информацией, записываемой датчиками транспортного средства первого транспортного средства 301. В этих вариантах выполнения тактильные сигналы могут соблюдать следующее соотношение: [включено 1/f1, выключено 1/f2, включено 1/f3, выключено 1/f4 и т.д.]; или, альтернативно, [включено 1/(2f1), выключено 1/(2f2), включено 1/(2f3), выключено 1/(2f4) и т.д.]. Следует отметить, что в этих вариантах выполнения последующие интервалы выключения не обязательно равны их предыдущим интервалам включения. Эта концепция может применяться к одному или всем из полного эффекта Доплера, приблизительного эффекта Доплера и упрощенного эффекта Доплера.
[0042] Фигура 7b представляет любой из полного эффекта Доплера, приблизительного эффекта Доплера и упрощенного эффекта Доплера применительно к тактильной обратной связи. В одном варианте выполнения совокупность 726a и 726b представляет собой полный тактильный сигнал. Частота этого сигнала составляет 1/(T2-T0). Каждое из 726a и 726b имеет равные временные интервалы. Новый тактильный сигнал начинается на 727a и заканчивается на 727b. То же самое применяется к 728 и 729. Следует отметить, что частота тактильных сигналов возрастает со временем (например, 1/(T4-T2)>1/(T2-T0).
[0043] Фигура 5 показывает конкретный случай использования тактильной обратной связи. Этот случай использования относится к моделированию шумовых полос с помощью моделей тактильной обратной связи. Здесь транспортное средство 501 движется по полосе 306 движения, определяемой дорожной линией 504 и разделительной линией 505. Цель этого случая использования заключается в предупреждении пользователя, когда транспортное средство приближается к одной из линий 504 и 505, что обнаруживается или сообщается датчиками транспортного средства. Тактильная программа проектирует или моделирует мнимые зоны шумовых полос (т.е. шумовые зоны) 502 и 503 вдоль дороги.
[0044] Фигура 4 показывает шумовую зону, включающую в себя множество шумовых полос. Выемка 401 имеет длину 404, ширину (не имеет позиции) и вырезана в дорожном покрытии 402 на заданную глубину (не показано). Дорожное покрытие 402 образует выемки 401 с интервалами 403. Одна шумовая полоса представляет собой сочетание выемки 401 и интервала 402 на дороге. Шумовые зоны продолжаются в продольном направлении вдоль дороги так, что передняя шина транспортного средства будет занимать каждую из выемок 401 последовательно. Centerline Rumble Strips (Отчет № CDOT-DTD-R-2001-8) под авторством William (пропущено) Outcalt, которое включено в настоящее описание путем ссылки во всей своей полноте, описывает примерные шумовые полосы и шумовые зоны.
[0045] Со ссылкой на Фигуру 5 и как описано выше, одна из программ, такая как тактильная программа, моделирует мнимые шумовые зоны 502 и 503 вдоль дороги. Тактильная программа сравнивает текущее положение транспортного средства с мнимыми шумовыми зонами 502 и 503. Конкретнее, тактильная программа проектирует полный профиль длины и ширины транспортного средства, включая шины транспортного средства. Когда какая-либо часть транспортного средства пересекает зоны 502 и 503, тактильная программа начинает генерировать тактильную обратную связь.
[0046] Конкретнее, тактильная программа производит тактильную обратную связь на основе обнаруженного или определенного наличия одного или более из следующих условий: транспортное средство пересекает мнимые шумовые зоны 502 и 503; сигнал поворота транспортного средства выключен; транспортное средство имеет по меньшей мере заданную скорость; внешнее транспортное средство находится в слепой зоне транспортного средства; внешнее транспортное средство находится в пределах заданного расстояния (по диагонали или перпендикулярно) от транспортного средства (обсуждаемого выше со ссылкой на эффект Доплера) и на полосе движения, смежной транспортному средству и мнимой шумовой полосе (т.е. шумовая зона 502 будет активной, только если транспортное средство будет находиться на левой полосе движения на Фигуре 5). Когда пересекаемая дорожная линия представляет собой границу дороги, а не только границу полос движения (например, дорожная линия отделяет входящий поток транспорта от выходящего потока транспорта или дорогу от тротуара, а не полосу 1 движения в направлении X от полосы 2 движения также в направлении X), тогда тактильная программа может применять другой набор указанных выше условий. В некоторых вариантах выполнения другой набор представляет собой одно или более транспортных средств, входящих в зону мнимой шумовой зоны, связанной с границей дороги и транспортным средством, имеющим скорость выше заданной скорости. Как обсуждалось ранее, различные варианты выполнения требуют наличия одного, некоторых или всех из этих условий для начала тактильной обратной связи.
[0047] Следует понимать, что тактильная программа не обязательно должна выполнять этот размерный анализ, и что другая программа, выполненная с возможностью взаимодействовать с тактильной программой, может выполнять размерный анализ и просто пересылать результаты анализа тактильной программе.
[0048] Тактильная программа генерирует интуитивную тактильную обратную связь, которая моделирует вибрации транспортного средства, едущего по реальным физическим шумовым полосам, со следующей матрицей: [включено в течение a/v1; выключено в течение b/v1; включено в течение a/v2; выключено в течение b/v2 и т.д.]. Здесь, а - длина 404 выемки шумовой полосы; b - длина интервала на дороге между шумовыми полосами 403; vn - заново измеренные, обнаруженные или принятые скорости транспортного средства. В предпочтительном варианте выполнения отношение a к b составляет 7:5. В некоторых вариантах выполнения применяется следующая преобразованная матрица шумовых полос: [включено в течение a/v1; выключено в течение b/v2; включено в течение a/v3; выключено в течение b/v4 и т.д.]. Как описано выше со ссылкой на эффект Доплера, это преобразованное уравнение шумовых полос позволяет тактильной программе быстрее приспосабливаться к изменениям скорости транспортного средства. Следует понимать, что в различных вариантах выполнения тактильная обратная связь представляет собой заданную модель тактильной обратной связи, которая не зависит от измеренной скорости.
[0049] Если тактильный двигатель имеет переменную величину, то тактильная программа может изменять величину на основе степени вхождения транспортного средства в мнимую зону (например, легкая тактильная обратная связь, когда передняя левая шина начинает пересекать левую линию зоны 502; сильная тактильная обратная связь, когда передняя левая шина полностью занимает зону 502). В некоторых случаях величина пропорциональна степени вхождения транспортного средства в тактильную зону. Фигура 5 показывает тактильные зоны, имеющие ширину, измеренную в направлении, перпендикулярном линиям 504 и 505. В этих случаях величина может быть минимальной величиной, когда транспортное средство 501 пересекает внешний край зон 502 и 503. Величина может увеличиваться, когда транспортное средство 501 занимает большую часть зон. Величина может достигать максимума на противоположном внешнем крае зон 502 и 503. Величина может достигать максимума на дорожных линиях 504 и 505. В этих случаях величина может оставаться при значении максимальной величины от дорожных линий 504 и 505 до противоположных внешних краев зон.
[0050] Фигура 6 иллюстрирует тактильные сигналы в соответствии с работой бинарного тактильного мотора. Мотор включен в моменты времени 601, 602 и 603. Мотор выключен в моменты времени время между 601, 602 и 603. Фигура 7c иллюстрирует тактильные сигналы в соответствии с работой переменного тактильного мотора. Мотор включен в моменты времени 751, 752, 753, 754 и 755. Величина тактильной обратной связи, производимой мотором, изменяется вдоль оси Y.
[0051] Фигура 8 показывает конкретный случай использования тактильной обратной связи на основе концепций из случая использования на Фигуре 5. Здесь тактильная обратная связь относится к продольному расстоянию между первым транспортным средством 801 и вторым транспортным средством 805. Тактильная обратная связь предназначена для удержания первого транспортного средства 801 на подходящем расстоянии от второго транспортного средства 805. Первое транспортное средство 801 находится в сообщении с умным носимым устройством, имеющим тактильный мотор.
[0052] В этом случае использования тактильная программа проектирует мнимые шумовые зоны 802, 803 и 804 между первым транспортным средством 801 и вторым транспортным средством 805. Тактильная программа также проектирует промежутки 806 и 807 между шумовыми зонами. Длины и положения шумовых зон 802-804 и промежутков 806 и 807 зависят от одного или более из скорости первого транспортного средства 801 и скорости второго транспортного средства 805. В некоторых вариантах выполнения зоны и/или промежутки удлиняются, когда первое транспортное средство 801 ускоряется, и укорачиваются, когда первое транспортное средство 801 замедляется. Удлинение и укорочение относятся к количеству шумовых полос в зоне, а не к расстоянию между шумовыми полосами в зоне. Абсолютные положения зон и промежутков 806 и 807 регулируются на основе скорости второго транспортного средства 805. Другими словами, абсолютные положения зон непрерывно обновляются, чтобы простираться за текущее положение второго транспортного средства 805. Если второе транспортное средство 805 имеет постоянную скорость, то положения зон относительно второго транспортного средства 805 могут быть постоянными. В некоторых вариантах выполнения тактильная программа выполняет этот случай использования только тогда, когда первое транспортное средство 801 превышает заданную скорость. В некоторых вариантах выполнения эти шумовые полосы непрерывно проектируются. В других вариантах выполнения эти шумовые полосы проектируются только тогда, когда выполняются определенные условия. Условия могут включать в себя одно или более из: скорость первого транспортного средства 801, скорость второго транспортного средства 805, относительное расстояние между транспортными средствами и относительные скорости транспортных средств.
[0053] Первая зона 802 шумовых полос имеет первое отношение a:b. Вторая зона 803 шумовых полос имеет второе отношение a:b. Третья зона 804 шумовых полос имеет третье отношение a:b. Как показано на Фигуре 8, отношение a/b для зоны 802 является небольшим; отношение a/b для зоны 803 является умеренным; и отношение a/b для зоны 804 является большим. В некоторых вариантах выполнения отношение a/b для зон является постоянным, и величина тактильной обратной связи увеличивается от первой зоны 802 к третьей зоне 804. В некоторых вариантах выполнения отношение a/b для зон является переменным, и величина тактильной обратной связи увеличивается от первой зоны 802 к третьей зоне 804.
[0054] Фигура 7а иллюстрирует последовательные тактильные сигналы. Мотор включен в моменты времени 701a и 702-708. Мотор выключен в моменты времени 701b, 706 и в другие непронумерованные промежутки. Выключение мотора в момент времени 706 представляет собой один из промежутков 806 или 807.
[0055] Фигура 9 показывает конкретный случай использования тактильной обратной связи, основанный на концепциях из случая использования на Фигуре 5 и выполненный с возможностью предотвращения столкновения между первым транспортным средством 901 и вторым транспортным средством 905 на парковке. Первое транспортное средство 901 соединено с умным носимым устройством, имеющим тактильный мотор. Первое транспортное средство 901 включает в себя тактильную программу. Первое транспортное средство 901 припарковано на месте, образованном между линиями 902 и 903. Второе транспортное средство 905 движется по полосе 904 движения. Первое транспортное средство 901 будет выполнять движение задним ходом на полосу 904 движения, как показано темной изогнутой линией движения, продолжающейся от задней части первого транспортного средства 901.
[0056] Как и во всех случаях использования, этот случай использования активируется (т.е. генерирует тактильную обратную связь) только тогда, когда выполняются определенные условия, включающие в себя одно или более из: включение передачи заднего хода на первом транспортном средстве; нахождение второго транспортного средства на смежной полосе движения; нахождение второго транспортного средства на заданном расстоянии от первого транспортного средства. Заданное расстояние может быть измерено по диагонали от первого транспортного средства 901 до второго транспортного средства 905 или перпендикулярно вдоль полосы 904 движения от второго транспортного средства 905 до плоскости, перпендикулярной продольному размеру полосы 904 движения и продолжающейся от ближайшей поверхности первого транспортного средства 901. Мнимая шумовая зона может начинаться на заданном расстоянии.
[0057] В этом случае использования тактильная программа проектирует мнимую шумовую зону с множеством шумовых полос 907. В варианте выполнения на Фигуре 9 шумовая зона взаимодействует со вторым транспортным средством 905 и начинается на заданном расстоянии. Другими словами, водитель первого транспортного средства 901 ощущает тактильную обратную связь, генерируемую в соответствии со свойствами второго транспортного средства 905. Это отличается от других случаев использования, когда водитель первого транспортного средства ощущает тактильную обратную связь, генерируемую в соответствии со свойствами первого транспортного средства.
[0058] В варианте выполнения на Фигуре 9 тактильная программа спроектировала шумовую зону 907, но еще не произвела тактильную обратную связь, так как промежуток 906 отделяет второе транспортное средство 905 от шумовой зоны 907 (т.е. второе транспортное средство 905 не находится достаточно близко к первому транспортному средству 901 для активации тактильной обратной связи).
[0059] Приведенное выше изобретение включает в себя непрерывно обновляемые тактильные сигналы обратной связи. В некоторых вариантах выполнения тактильная программа соблюдает или применяет правило едва заметного различия (правило JND) между последовательными тактильными сигналами обратной связи. Правило JND предполагает, что для эффективности тактильных предупреждений, разница между последовательными тактильными предупреждениями должна превышать пороговое значение.
[0060] Например, представьте тактильную модель со следующими двумя тактильными сигналами обратной связи: [включено t1, выключено t2, включено t3, выключено t4]. Как обсуждалось выше, в некоторых вариантах выполнения один тактильный сигнал обратной связи может представлять собой комбинацию инструкции на включение и инструкции на выключение (т.е. t1+t2). Предположим, что t1+t2 не равно t3+t4, так что второй сигнал обратной связи передает информацию, отличающуюся от первого сигнала обратной связи. Правило JND предполагает, что разница между t1 и t3 (или t1+t2 по отношению к t3+t4) должна быть больше порогового значения для пользователя, чтобы заметить разницу между первым сигналом обратной связи и вторым сигналом обратной связи. Другими словами, если разница меньше порогового значения, то пользователь будет полагать, что первый и второй тактильные сигналы обратной связи идентичны.
[0061] В связи с этим в различных вариантах выполнения в вышеприведенных случаях использования применяется правило JND так, что последовательные тактильные сигналы обратной связи должны быть либо идентичны, либо должны иметь разницу, большую или равную пороговому значению. Тактильная программа может включать в себя инструмент калибровки JND. Инструмент калибровки проверяет способность пользователей различать последовательные тактильные сигналы обратной связи. Инструмент калибровки может устанавливать пороговое значение JND пользователя на самое низкое пороговое значение, когда пользователь постоянно способен различать последовательные сигналы. В различных вариантах выполнения постоянная способность представляет собой точность более чем одного из следующих: 70 процентов, 80 процентов, 90 процентов, 95 процентов, 97 процентов, 99 процентов, 99,5 процентов, 99,9 процентов, и 100 процентов.
[0062] Следующие определения относятся к формуле изобретения: (1) Граница дороги представляет собой границу между полосой движения и одним из: полосы движения, по которой осуществляется движение в противоположном направлении, и поверхности, не являющейся дорогой (например, разделительная полоса, тротуар, трава, грязь). (2) Граница полос движения представляет собой границу между полосами движения дороги, по которой осуществляется движение в одном том же направлении. (3) Тактильный мотор представляет собой мотор, выполненный с возможностью колебания массы для вызова вибраций. Колебание может быть линейным, вращательным или сочетанием линейного и вращательного. (4) Матрица с последовательностью периодов включения и выключения включает в себя такую же матрицу с поменянными периодами включения и выключения. Например, заявленная матрица [включено X, выключено Y и т.д.] также включает в себя матрицу [выключено X, включено Y и т.д.]. (5) Когда формула изобретения включает в себя выражение «эффект Доплера», формула изобретения рассматривает и охватывает либо полный эффект Доплера, либо приблизительный эффект Доплера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДВЕРЬМИ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2705890C2 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ СВЕТОВОГО ПОТОКА НА ОСНОВАНИИ ИЗОБРАЖЕНИЙ | 2019 |
|
RU2744510C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2702292C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ОЧИСТКИ СНЕГА ПОСРЕДСТВОМ ПРОЦЕССОРА(ОВ) ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2682683C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2016 |
|
RU2702378C2 |
| ИНФОРМАЦИЯ О ПОГОДНЫХ УСЛОВИЯХ НА ОСНОВЕ МАГНИТОМЕТРОВ | 2014 |
|
RU2582500C2 |
| СИСТЕМЫ И СПОСОБЫ ФОРМИРОВАНИЯ СВЕТОВОГО ПОТОКА НА ОСНОВАНИИ ИЗОБРАЖЕНИЙ | 2019 |
|
RU2729196C1 |
| НАСТРАИВАЕМАЯ ОТЧЕТНОСТЬ С ПОМОЩЬЮ НОСИМОГО УСТРОЙСТВА | 2015 |
|
RU2735112C2 |
| БИОСЕНСОРЫ, КОММУНИКАТОРЫ И КОНТРОЛЛЕРЫ ДЛЯ МОНИТОРИНГА ДВИЖЕНИЯ ГЛАЗ И СПОСОБЫ ИХ ПРИМЕНЕНИЯ | 2005 |
|
RU2395228C2 |
| ИНТУИТИВНЫЙ ИНТЕРФЕЙС ПРЕДВАРИТЕЛЬНОГО КОНДИЦИОНИРОВАНИЯ | 2017 |
|
RU2733560C2 |

Изобретение относится к вспомогательным системам автомобиля. Система интуитивных тактильных предупреждений содержит процессор, находящийся в оперативной связи с транспортным средством. Процессор выполнен с возможностью проектирования шумовых зон на дороге, идентификации, когда транспортное средство занимает проектируемую шумовую зону, генерирования последовательности команд для тактильного мотора. Проектируемые шумовые зоны включают в себя последовательность проектируемых выемок, имеющих длину «а», причем последовательные выемки отделены промежутком, имеющим длину «b». Генерирование последовательности команд для тактильного мотора происходит на основе: идентифицированного события занятия проектируемых шумовых зон и принятой скорости транспортного средства, причем каждая команда включает в себя время включения двигателя, которое равно «а» (принятая скорость транспортного средства в момент времени X) в сочетании с временем выключения двигателя, которое равно «b» (принятая скорость транспортного средства в момент времени X), и причем a:b=7:5. Достигается повышение безопасности водителя. 2 н. и 9 з.п. ф-лы, 11 ил.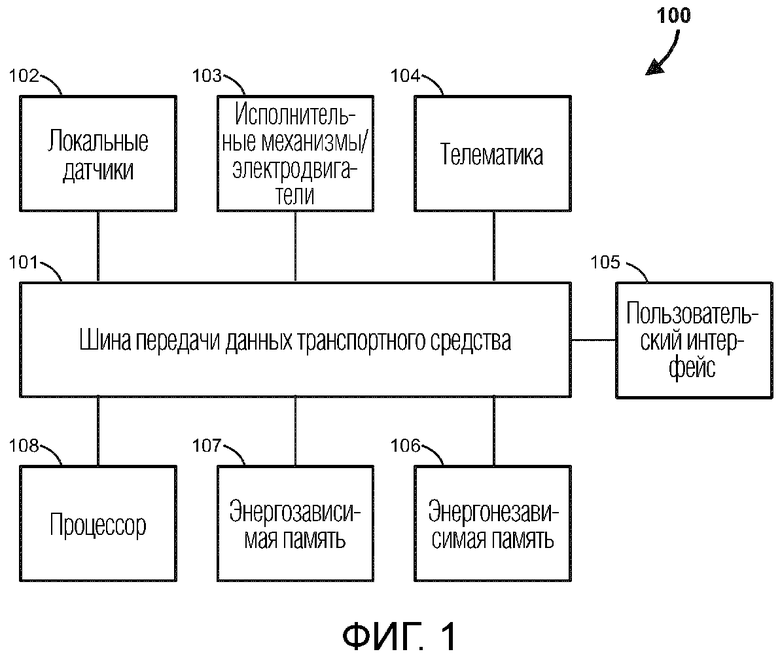
1. Система интуитивных тактильных предупреждений, содержащая процессор(ы), находящий(ие)ся в оперативной связи с транспортным средством и выполненный(ые) с возможностью:
проектирования шумовых(ой) зон(ы) на дороге, причем проектируемая шумовая(ые) зона(ы) включае(ю)т в себя последовательность проектируемых выемок, имеющих длину «а», причем последовательные выемки отделены промежутком, имеющим длину «b»;
идентификации того, когда транспортное средство занимает проектируемую шумовую(ые) зону(ы);
генерирования последовательности команд для тактильного мотора на основе: идентифицированного события занятия проектируемой(ых) шумовой(ых) зоны(н) и принятой скорости транспортного средства, причем каждая команда включает в себя время включения двигателя, которое равно «а» / (принятая скорость транспортного средства в момент времени X) в сочетании с временем выключения двигателя, которое равно «b» / (принятая скорость транспортного средства в момент времени X), и причем a:b=7:5.
2. Система по п. 1, в которой процессор(ы) выполнен(ы) с возможностью:
генерирования последовательности команд на основе обнаружения отсутствия сигнала поворота транспортного средства.
3. Система по п. 1, в которой процессор(ы) выполнен(ы) с возможностью генерировать последовательность команд на основе наборов условий; причем набор условий для зоны, проектируемой на границе полос движения, отличается от набора условий для зоны, проектируемой на границе дороги.
4. Система по п. 1, в которой процессор(ы) выполнен(ы) с возможностью назначения длительности неидентичных последовательных команд, так что длительности отличаются по меньшей мере на пороговый период времени.
5. Система по п. 4, в которой процессор(ы) выполнен(ы) с возможностью выполнения программы калибровки, которая определяет пороговый период времени для водителя.
6. Система по п. 1, в которой процессор(ы) выполнен(ы) с возможностью проектирования проектируемой(ых) шумовой(ых) зоны(н) по границам дороги и границам полос движения и изменения последовательности команд на основе оцененной степени проникновения транспортного средства в проектируемые зоны.
7. Система по п. 1, в которой транспортное средство представляет собой первое транспортное средство, и процессор(ы) выполнен(ы) с возможностью:
обнаружения второго транспортного средства, находящегося впереди первого транспортного средства;
проектирования шумовых(ой) зон(ы) по дороге между первым транспортным средством и вторым транспортным средством.
8. Система по п. 7, в которой процессор(ы) выполнен(ы) с возможностью:
проектирования по меньшей мере одной из множества шумовых зон по дороге между первым транспортным средством и вторым транспортным средством.
9. Система интуитивных тактильных предупреждений, содержащая процессор(ы), находящий(ие)ся в оперативной связи с первым транспортным средством и выполненный(ые) с возможностью:
обнаружения второго транспортного средства, находящегося впереди первого транспортного средства;
проектирования шумовых(ой) зон(ы) по дороге между первым транспортным средством и вторым транспортным средством, причем проектируемая(ые) шумовая(ые) зона(ы) включае(ю)т в себя последовательность проектируемых выемок, имеющих длину «а», причем последовательные выемки отделены промежутком, имеющим длину «b»;
идентификации того, когда первое транспортное средство займет зону(ы);
генерирования последовательности команд для тактильного мотора на основе: идентифицированного события занятия проектируемо(ых) шумовой(ых) зоны(н) и принятой скорости транспортного средства второго транспортного средства.
10. Система по п. 9, в которой процессор(ы) выполнен(ы) с возможностью:
установления отношения a:b для каждой из проектируемых шумовых зон на основе расстояния между указанной проектируемой зоной и указанным вторым транспортным средством.
11. Система по п. 10, в которой процессор(ы) выполнен(ы) с возможностью:
увеличения а/b, когда первое транспортное средство приближается ко второму транспортному средству.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| RU 2013142550 A, 27.03.2015. | |||

