ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Это раскрытие относится к кинематике транспортного средства и предотвращению столкновений транспортных средств путем учета коэффициента кинетического трения.
УРОВЕНЬ ТЕХНИКИ
[0002] Патент США №8,180,547 раскрывает систему и способ обнаружения условия проскальзывания между шиной транспортного средства и поверхностью дороги, обработки оперативных данных транспортного средства, таких как прикладываемые крутящий момент или тормозное давление, для определения силы трения и вычисления коэффициента трения. Коэффициент трения и местоположение проскальзывания широковещательным образом передаются другим транспортным средствам, движущимся вблизи проскальзывания. Передачи могут быть использованы для уведомления водителя о скользких условиях движения на или впереди транспортного средства и/или для ограничения крутящего момента и тормозного давления, прикладываемого к колесам транспортного средства, для увеличения силы сцепления и избежания проскальзывания.
[0003] Патент США №6,866,349 раскрывает систему управления силой сцепления транспортного средства, имеющую возможности для вмешательства в торможение и обнаружения коэффициента трения. Для того, чтобы улучшать поперечную устойчивость транспортного средства при движении на поворотах на поверхностях дороги, имеющих низкий коэффициент трения, пороговое значение проскальзывания для ведущего колеса с наружной стороны поворота уменьшается независимо от порогового значения проскальзывания ведущего колеса с внутренней стороны поворота и устанавливается на более низком значении, чем пороговое значение проскальзывания для колеса с внутренней стороны поворота.
[0004] Патент США №6,791,471 раскрывает систему для беспроводной связи между транспортными средствами, которая позволяет непосредственно сообщать информацию о положении об одном транспортном средстве другому транспортному средству. Такой обмен информацией между транспортными средствами может увеличивать информированность оператора транспортного средства о других транспортных средствах в окружающей среде. Транспортные средства могут делиться, посредством использования беспроводных связей, положением, направлением, скоростью или другой информацией, такой как раскрытие устройств безопасности. Транспортное средство, которое принимает беспроводную связь, сравнивает положение, направление и скорость из поступающей информации от другого транспортного средства с собственной скоростью, направлением и положением транспортного средства для определения, требуется ли действие. Действие, предпринимаемое транспортным средством, может включать в себя обеспечение общих или конкретных предупреждений для оператора транспортного средства или, в некоторых случаях, предпринятие непосредственного действия, такого как выключение круиз-контроля, применение тормозов или задействование управления силой сцепления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Заявлено первое транспортное средство, содержащее:
рулевое управление, тормоза, память, датчики и процессор(ы), выполненные с возможностью:
определения, с помощью датчиков: ускорения первого транспортного средства, ускорения второго транспортного средства;
вычисления теоретической скорости столкновения (TCV) между первым транспортным средством и вторым транспортным средством на основе ускорений;
генерации команды на основе TCV и выбранного коэффициента кинетического трения (COF).
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью: выбора COF из сохраненной группы COF.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью: построения группы COF из COF дороги, существующей между первым транспортным средством и вторым транспортным средством.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству;
вычисления TCV на основе первого отрегулированного ускорения.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству только тогда, когда ускорение первого транспортного средства меньше нуля.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству на основе определения, что ускорение первого транспортного средства меньше нуля.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству только тогда, когда первое отрегулированное ускорение < ускорения первого транспортного средства.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения второго отрегулированного ускорения второму транспортному средству;
вычисления TCV на основе второго отрегулированного ускорения.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения второго отрегулированного ускорения второму транспортному средству только тогда, когда ускорение второго транспортного средства меньше нуля.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения второго отрегулированного ускорения второму транспортному средству на основе определения, что ускорение второго транспортного средства меньше нуля.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения второго отрегулированного ускорения второму транспортному средству только тогда, когда второе отрегулированное ускорение > ускорения второго транспортного средства.
В упомянутом первом транспортном средстве сгенерированная команда автоматически заставляет первое транспортное средство предупредительно мигать тормозными световыми приборами с частотой, ассоциированной со сгенерированной командой.
Причем в упомянутом первом транспортном средстве сгенерированная команда автоматически заставляет первое транспортное средство передавать связь между транспортными средствами с частотой, ассоциированной со сгенерированной командой.
[0006] Заявлено первое транспортное средство, содержащее:
рулевое управление, тормоза, память, датчики и процессор(ы), выполненные с возможностью:
определения, с помощью датчиков: ускорения первого транспортного средства, ускорения второго транспортного средства;
вычисления теоретической скорости столкновения (TCV) между первым транспортным средством и вторым транспортным средством на основе ускорений;
генерации команды на основе TCV.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству;
вычисления TCV на основе первого отрегулированного ускорения.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству только тогда, когда ускорение первого транспортного средства меньше нуля.
Причем в упомянутом первом транспортном средстве процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству на основе определения, что ускорение первого транспортного средства меньше нуля.
[0007] Раскрыт способ управления первым транспортным средством, которое имеет рулевое управление, тормоза, память и процессор(ы), причем способ содержит этапы, на которых с помощью процессора:
определяют, с помощью датчиков: ускорение первого транспортного средства, ускорение второго транспортного средства;
вычисляют теоретическую скорость столкновения (TCV) между первым транспортным средством и вторым транспортным средством на основе ускорений;
генерируют команду на основе TCV и выбранного коэффициента кинетического трения (COF).
В заявленном способе процессор(ы) выполнены с возможностью:
присвоения второго отрегулированного ускорения второму транспортному средству;
вычисления TCV на основе второго отрегулированного ускорения.
В заявленном способе процессор(ы) выполнены с возможностью:
присвоения второго отрегулированного ускорения второму транспортному средству только тогда, когда ускорение второго транспортного средства меньше нуля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и соответствующие элементы могут быть исключены или, в некоторых случаях, пропорции могут быть преувеличены так, чтобы подчеркивать и ясно иллюстрировать новые признаки, описанные здесь. В дополнение, компоненты системы могут быть расположены различным образом, как известно в уровне техники. Дополнительно, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на всех нескольких видах.
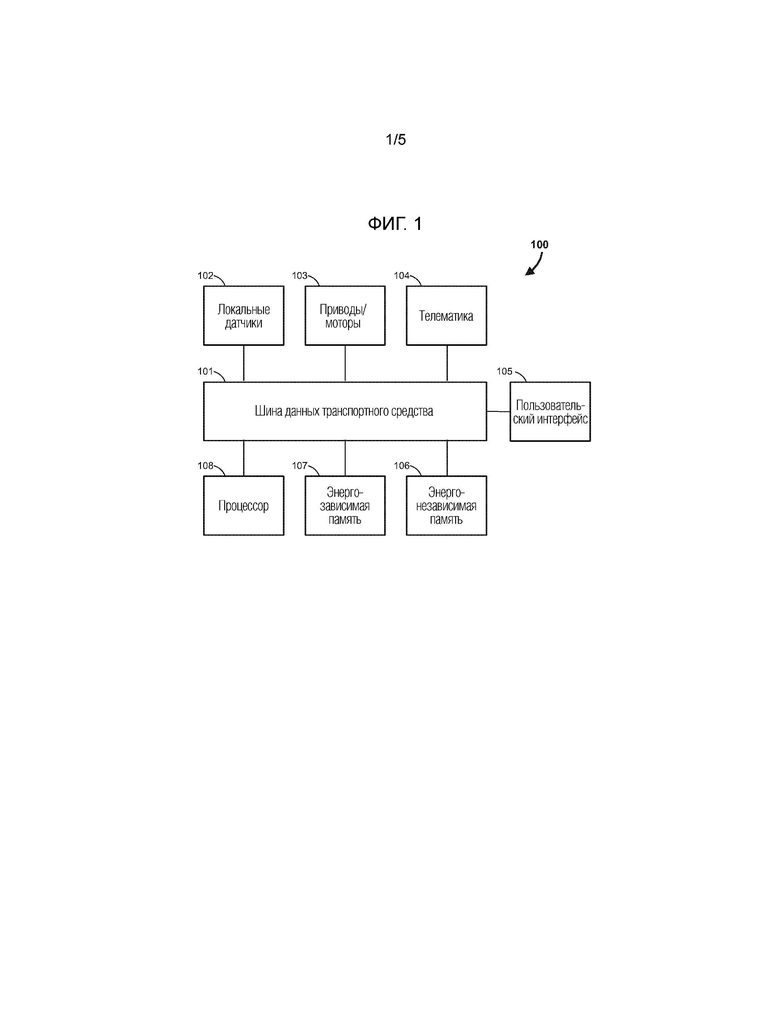
[0009] Фигура 1 представляет собой блок-схему вычислительной системы транспортного средства.
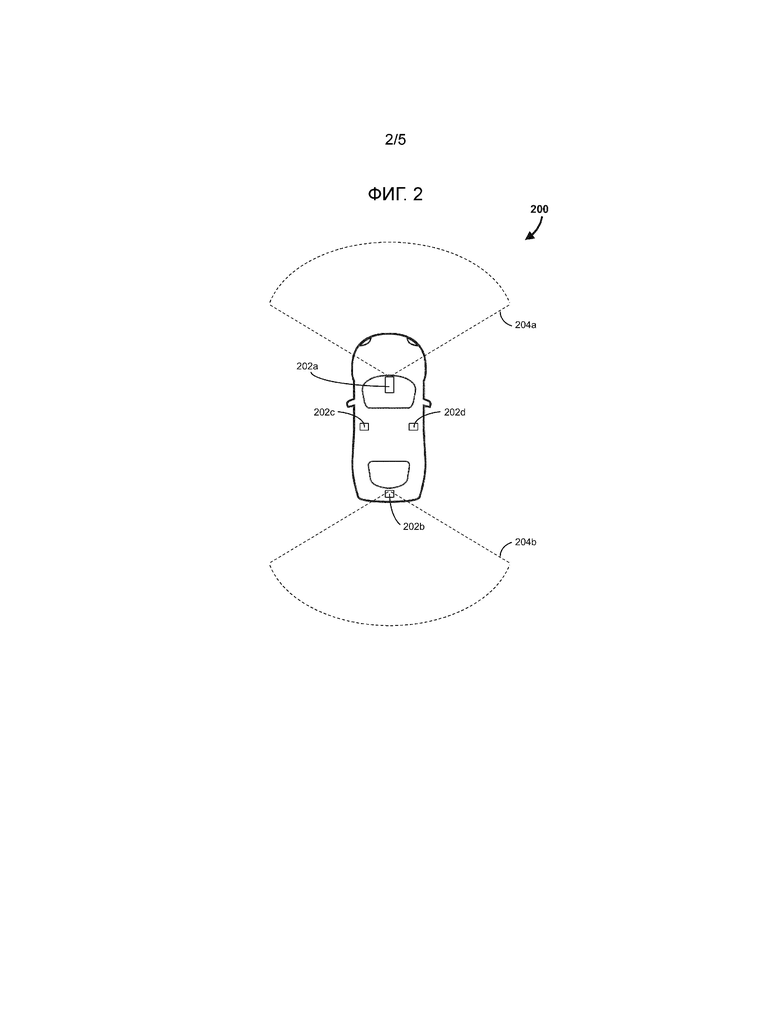
[0010] Фигура 2 представляет собой схему транспортного средства, включающего в себя вычислительную систему транспортного средства.
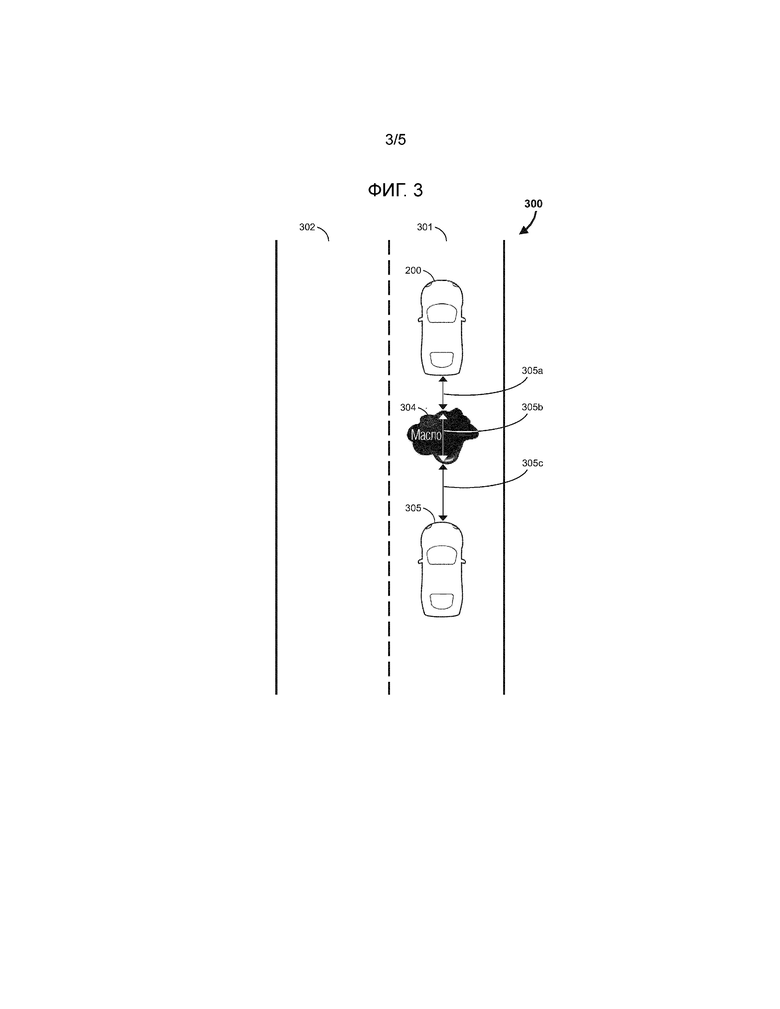
[0011] Фигура 3 представляет собой примерный случай использования для настоящего изобретения.
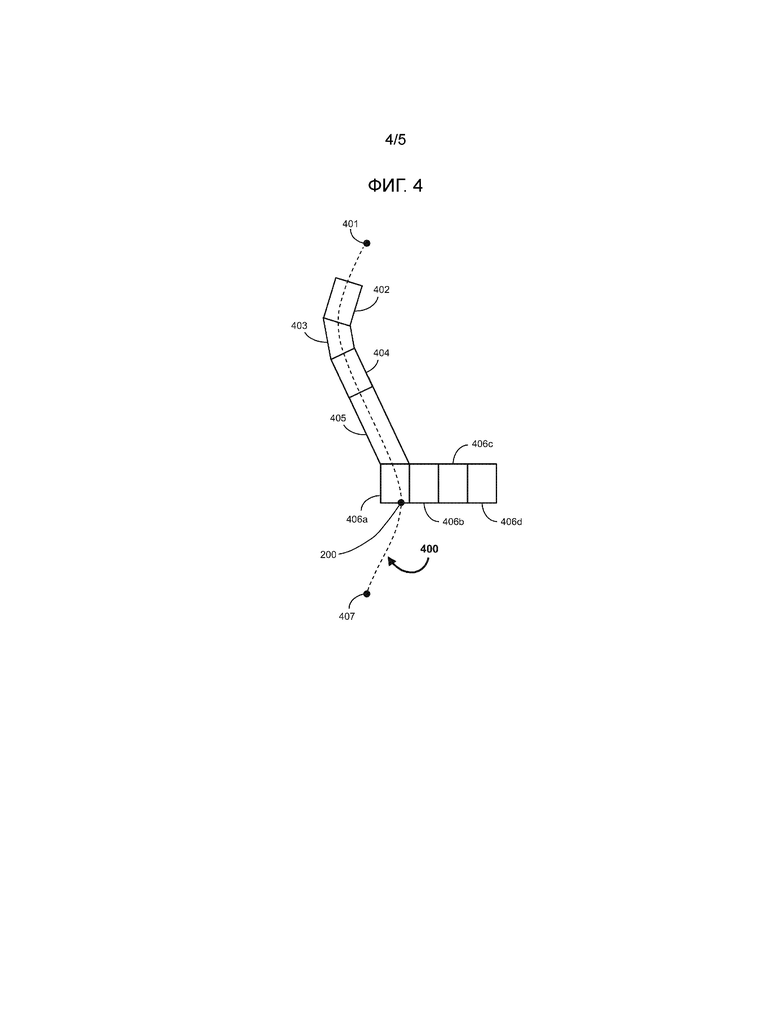
[0012] Фигура 4 иллюстрирует сбор данных о трении по сегменту дороги.
[0013] Фигура 5 представляет собой блок-схему примерного алгоритма для применения в случае использования на Фигуре 3.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0014] Несмотря на то, что изобретение может быть выполнено в различных формах, на чертежах показаны и будут далее описаны некоторые примерные и неограничивающие варианты выполнения с пониманием того, что настоящее раскрытие должно рассматриваться как иллюстративный пример изобретения и не предназначено для ограничения изобретения конкретными проиллюстрированными вариантами выполнения.
[0015] В этой заявке использование разделительного союза предназначено для включения соединительного союза. Использование определенных и неопределенных артиклей не предназначено для указания существенности. В частности, ссылка на объект с определенным артиклем или неопределенным объектом предназначена для означает также один из возможного множества таких объектов. Дополнительно, союз «или» может быть использован для передачи признаков, которые присутствуют одновременно, в качестве одной возможности, и взаимоисключающих альтернатив в качестве другой возможности. Другими словами, союз «или» следует понимать включающим в себя «и/или» в качестве одной возможности и «или/или» в качестве другой возможности.
[0016] Фигура 1 показывает вычислительную систему 100 примерного транспортного средства 200. Транспортное средство 200 также называется первым транспортным средством 200. Транспортное средство 200 включает в себя мотор, аккумуляторную батарею, по меньшей мере одно колесо, приводимое в движение мотором, и систему рулевого управления, выполненную с возможностью поворачивания по меньшей мере одного колеса вокруг оси. Подходящие транспортные средства также описаны, например, в заявке на патент США №14/991,496, Миллер и др. («Миллер») и патенте США №8,180,547, Прасад и др. («Прасад»), оба из которых включены здесь путем ссылки во всей своей полноте. Вычислительная система 100 обеспечивает автоматическое управление механическими системами в устройстве. Она также обеспечивает связь с внешними устройствами. Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательские интерфейсы 105, телематический блок 104, приводы и моторы 103 и локальные датчики 102.
[0017] Шина 101 данных передает электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными для производства модифицированных электронных сигналов или данных. Энергозависимая память 107 хранит данные для немедленного извлечения процессором 108. Энергонезависимая память 106 хранит данные для извлечения в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя диапазон энергонезависимых устройств памяти, включающих в себя жесткие диски, SSD, DVD, Blu-Ray и т.д. Пользовательский интерфейс 105 включает в себя дисплеи, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые обеспечивают взаимодействие пользователя с вычислительной системой. Телематический блок 104 обеспечивает возможность и проводной, и беспроводной связи с внешними процессорами с помощью Bluetooth, сотовых данных (например, 3G, LTE), USB и т.д. Телематический блок 104 может быть выполнен с возможностью широковещательной передачи сигналов с некоторой частотой (например, один тип передачи между транспортными средствами с 1 кГц или 200 кГц в зависимости от вычислений, описанных ниже). Приводы/моторы 103 производят физические результаты. Примеры приводов/моторов включают в себя топливные инжекторы, очистители ветрового стекла, схемы тормозных световых приборов, трансмиссии, подушки безопасности, тактильные моторы или двигатели и т.д. Локальные датчики 102 передают цифровые показания или измерения в процессор 108. Примеры подходящих датчиков включают в себя датчики температуры, датчики вращения, датчики ремня безопасности, датчики скорости, камеры, лидарные датчики, радарные датчики и т.д. Следует принимать во внимание, что различные подсоединенные компоненты на Фигуре 1 могут включать в себя отдельные или специализированные процессоры и память. Дополнительные подробности структуры и операций вычислительной системы 100 описаны, например, у Миллера и/или Прасада.
[0018] Фигура 2 в общем показывает и иллюстрирует транспортное средство 200, включающее в себя вычислительную систему. Несмотря на то, что не показано, транспортное средство 200 находится в оперативной беспроводной связи с портативным устройством, таким как мобильный телефон. Транспортное средство 200 включает в себя датчики 202, установленные снаружи транспортного средства 200. Датчик 202а может представлять собой ультразвуковой датчик и/или лидарный датчик, выполненный с возможностью обнаружения объектов впереди транспортного средства 200, как обозначено передним диапазоном 204а восприятия. Датчик 202b может представлять собой ультразвуковой датчик и/или лидарный датчик, выполненный с возможностью обнаружения объектов сзади транспортного средства 200, как обозначено задним диапазоном 204b восприятия. Левый датчик 202с и правый датчик 202d могут быть выполнены с возможностью выполнения таких же функций для левой и правой сторон транспортного средства 200s. Транспортное средство 200 включает в себя ряд других датчиков 202, расположенных внутри транспортного средства 200 или снаружи транспортного средства 200. Эти датчики включают в себя любые или все из датчиков, раскрытых у Прасада. В частности, транспортное средство 200 включает в себя датчики, выполненные с возможностью измерения коэффициента кинетического трения между проскальзывающим колесом/шиной транспортного средства 200 и поверхностью дороги.
[0019] Следует принимать во внимание, что транспортное средство 200 выполнено с возможностью выполнения способов и операций, описанных ниже. В некоторых случаях транспортное средство 200 выполнено с возможностью выполнения этих функций с помощью компьютерных программ, хранящихся на различных энергозависимых или энергонезависимых устройствах памяти вычислительной системы 100. Другими словами, процессор выполнен с возможностью выполнения раскрытой операции, когда он находится в оперативной связи с памятью, хранящей программу программного обеспечения с кодом или инструкциями, воплощающими раскрытую операцию. Дополнительное описание того, как процессор, устройства памяти и программы взаимодействуют, появляется у Прасада. Дополнительно следует принимать во внимание, что портативное устройство (описанное ниже) в оперативной связи с транспортным средством 200 может альтернативно или в дополнение выполнять некоторые или все из способов и операций, рассмотренных ниже, посредством запроса датчиков транспортного средства 200.
[0020] В различных вариантах выполнения транспортное средство 200 представляет собой транспортное средство 200 100а Прасада. В различных вариантах выполнения вычислительная система 100 представляет собой VCCS 102 на Фигуре 2 Прасада. В различных вариантах выполнения транспортное средство 200 находится в связи с некоторыми или всеми из устройств, показанных на Фигуре 1 Прасада, включающих в себя портативное устройство 110, вышку 116 связи, телекоммуникационную сеть 118, Интернет 120 и центр 122 обработки данных. Как отмечено выше, транспортное средство 200 и/или портативное устройство (не показано) настоящего раскрытия выполнены с возможностью (с помощью программирования, хранящегося на устройствах памяти, связанных с процессорами) выполнения некоторых или всех из функций, раскрытых у Прасада. Конкретнее, транспортное средство 200 и портативное устройство выполнены с возможностью выполнения способов, раскрытых на Фигурах 3-7 Прасада, и любых других способов, раскрытых в описании. Таким образом, следует принимать во внимание, что способы, раскрытые как выполняемые на транспортном средстве 200, могут быть альтернативно или в дополнение выполнены на портативном устройстве.
[0021] В соответствии с раскрытием Прасада, транспортное средство 200 настоящего раскрытия выполнено с возможностью вычисления коэффициента кинетического трения, μk, между колесом транспортного средства 200 и поверхностью дороги, как раскрыто, например, в столбцах 4 и 8 Прасада. Это описание относится к коэффициенту кинетического трения в виде и «μk», и «COF». Транспортное средство 200 настоящего раскрытия выполнено с возможностью вычисления μk для каждого из колес транспортного средства 200 и выполнено с возможностью сохранения вычисленного μk в памяти транспортного средства 200. Дополнительно, транспортное средство 200 настоящего раскрытия выполнено с возможностью определения местоположения записанного коэффициента трения, как раскрыто в столбцах 8 и 9 Прасада. Транспортное средство 200 выполнено с возможностью ассоциирования настоящего местоположения с каждым вычисленным μk. В некоторых вариантах выполнения, и как раскрыто у Прасада, транспортное средство предполагает, что дорога имеет заранее определенный μk до тех пор, пока транспортное средство не обнаружит проскальзывание колес.
[0022] Фигура 4 в общем показывает и иллюстрирует транспортное средство 200, измеряющее и записывающее μk по пути 400. Транспортное средство 200 начинает в начальной точке 401, затем проходит путь 400 до конечной точки 407. Когда транспортное средство 200 проходит путь 400, транспортное средство 200 измеряет и записывает μk. Для экономии данных транспортное средство 200 разделяет пути на различные сегменты 402-406 и затем записывает один μk для каждого сегмента. Например, сегмент 402 имеет первый μk, сегмент 403 имеет второй μk и т.д.
[0023] Каждый сегмент имеет длину. Длина сегмента соответствует длине дороги, связанной с сегментом. Как показано на Фигуре 4, сегмент 403 имеет короткую длину, сегмент 404 имеет среднюю длину, а сегмент 405 имеет большую длину. Каждый сегмент (независимо от его длины) в общем требует одинакового количества памяти для хранения, выделенного длине. Конкретнее, память хранит два или более из местоположения начала сегмента, общей длины сегмента и местоположения конца сегмента. Например, длина сегмента 403 может храниться в примерной матрице [начало в X, конец в Y]. Таким образом, следует принимать во внимание, что, когда транспортное средство 200 разделяет путь 400 на несколько сегментов, транспортное средство 200 должно выделять большее количество памяти для хранения пути 400. И наоборот, когда транспортное средство 200 увеличивает длины сегментов, транспортное средство 200 выделяет меньшее количество памяти для хранения пути 400. Например, один сегмент, продолжающийся от начальной точки 401 до конечной точки 407, будет занимать первое количество памяти. Если, однако, путь 400 был разбит на множество сегментов (как показано на Фигуре 4), то информация, связанная с путем, будет занимать второе, большее количество памяти.
[0024] Транспортное средство 200, таким образом, выполнено с возможностью разделения длин сегмента пути, таких как длины пути 400, с помощью различных алгоритмов программного обеспечения. Различные алгоритмы программного обеспечения объяснены подробно ниже. Следует принимать во внимание, что эти алгоритмы программного обеспечения являются примерами, и что могут быть применены другие алгоритмы программного обеспечения.
[0025] Первый алгоритм разделяет путь 400 на сегменты путем сравнения новых измерений со средним предыдущих измерений. Конкретнее, первый алгоритм сравнивает вновь измеренный μk со скользящим средним μk текущего сегмента. Если вновь измеренный μk соответствует скользящему среднему μk текущего сегмента в пределах некоторых заранее определенных пределов, то первый алгоритм объединяет скользящее среднее с вновь измеренным μk и продолжает текущий сегмент для охвата местоположения, ассоциированного с вновь измеренным μk. Объединение может содержать взвешивание скользящего среднего μk согласно числу измерений, ранее объединенных в скользящее среднее μk. Например, если скользящее среднее μk представляло собой среднее десяти дискретных μk, то скользящее среднее может быть взвешено по десяти, а вновь измеренный μk может быть взвешен по одному, как показано в следующей формуле: μkновое скользящее среднее=(X × μkпредыдущее скользящее среднее+1 × μkвновь измеренный)/(X+1), где X представляет собой число дискретных измерений, объединенных для образования предыдущего скользящего среднего, μkпредыдущее скользящее среднее.
[0026] Некоторые заранее определенные пределы могут представлять собой заранее определенные процентные значения выше и ниже скользящего среднего. Конкретнее, верхний предел может быть на 5% выше скользящего среднего, а нижний предел может быть на 5% ниже скользящего среднего. Когда вновь измеренный μk попадает между верхним пределом и нижним пределом, сегмент продолжается, и вновь измеренный μk интегрируется в скользящее среднее для образования нового скользящего среднего, как описано выше. Когда вновь измеренный μk выходит за пределы (т.е. находится выше верхнего предела или ниже нижнего предела), то транспортное средство 200 заканчивает текущий сегмент, сохраняет текущий сегмент и начинает новый сегмент со скользящим средним=μkвновь измеренный. Альтернативно, верхние и нижние пределы могут представлять собой заранее определенное процентное значение первого дискретного измерения сегмента вместо заранее определенного процентного значения скользящего среднего сегмента. Это будет приводить к точным измерениям μk, когда μk дороги медленно увеличивается или медленно уменьшается.
[0027] Второй алгоритм разделяет путь 400 на сегменты путем сравнения новых измерений μk с заранее определенными диапазонами. Первый диапазон может включать в себя все μk от 0 до 0,1 (включительно). Второй диапазон может включать в себя все μk выше 0,1 до 0,2 (включительно). Третий диапазон может включать в себя все μk выше 0,2 до 0,3 (включительно) и т.д. В этом случае транспортное средство 200 будет начинать новый сегмент, когда вновь измеренный μk попадает в новый диапазон (т.е. диапазон, отличный от текущего диапазона).
[0028] Со ссылкой на Фигуру 4, сегмент 402 может представлять собой первый диапазон, сегмент 403 может представлять собой третий диапазон, а сегмент 404 может представлять собой второй диапазон. В соответствии с этим алгоритмом транспортное средство 200 может ассоциировать характерный один μk с сегментом по меньшей мере тремя образами: во-первых, путем усреднения всех μk, записанных внутри сегмента; во-вторых, путем автоматического нахождения среднего границ диапазона, ассоциированных с сегментом, и затем маркировки сегмента характерным μk, независимым от фактического записанного μk (например, каждому второму диапазону будет присвоен характерный μk 0,15=среднее 0,1 и 0,2, независимо от того, какие μk были фактически записаны в сегменте); в-третьих, путем автоматического присвоения сегменту μk, равного наименьшему μk, измеренному в сегменте (например, если сегмент 404 включал измерения μk 0,11, 0,16 и 0,18, то транспортное средство 200 будет отмечать сегмент 404 как имеющий характерный μk 0,11).
[0029] Третий алгоритм разделяет путь 400 на сегменты на основе событий торможения. Другими словами, каждый сегмент ассоциирован либо с (а) событием движения накатом или ускорения, либо (b) событием торможения. Новый сегмент начинается, когда транспортное средство 200 переходит от (а) к (b) или от (b) к (а).
[0030] Следует принимать во внимание, что вышеприведенные алгоритмы предусматривают нахождение μk, когда транспортное средство является устойчивым (т.е. не скользит) и когда транспортное средство скользит. В некоторых вариантах выполнения, которые раскрыты у Прасада, транспортное средство вычисляет μk со ссылкой на крутящий момент транспортного средства только тогда, когда транспортное средство скользит. В этих вариантах выполнения транспортное средство может находить μk, будучи устойчивым (т.е. не скользя) путем обнаружения типа поверхности дороги и сопряжения обнаруженной поверхности дороги с измеренным или принятым условием окружающей среды (например, дождем). Прасад, например, раскрывает, что μk между резиной и сухим бетоном составляет 0,6-0,85, тогда как μk между резиной и мокрым бетоном составляет 0,45-0,75. В других вариантах выполнения транспортное средство непрерывно вычисляет μk со ссылкой на крутящий момент транспортного средства (или другими известными способами, которые интегрируют результаты локальных датчиков транспортного средства наряду с датчиками условий окружающей среды), независимо от того, является ли транспортное средство устойчивым или скользит.
[0031] В дополнение к длине, каждый сегмент имеет ширину. Ширина сегмента ассоциирована с количеством информации, ассоциированной с сегментом. Например, некоторые сегменты ассоциированы с одним μk, представляющим коэффициент трения пути 400 в сегменте. Другие сегменты, однако, могут включать в себя множество μk, каждый из которых представляет коэффициент трения одной шины транспортного средства.
[0032] Со ссылкой на Фигуру 4, сегменты 402-405 имеют одинаковую ширину. Сегмент 406 включает в себя ширины 406а, 406b, 406c и 406d. Сегмент 406, таким образом, включает в себя μk для каждой из шин транспортного средства 200 и включает в себя более подробную информацию, чем сегменты 402-405. В различных вариантах выполнения сегмент 406 состоит из двух ширин 406а и 406b, представляющих левую сторону пути 400 и правую сторону пути 400.
[0033] Следует принимать во внимание, что транспортное средство 200 может исполнять любые из раскрытых выше алгоритмов для каждой из ширин. Другими словами, сегменты 402-405 могут представлять μk только правой стороны пути 400. В этом случае транспортное средство 200 будет одновременно наносить на карту и сегментировать μk для левой стороны транспортного средства 200 с другими сегментами (не показаны). Длины сегментов для левой стороны пути 400 и правой стороны пути 400 могут различаться и могут по отдельности зависеть от вышеописанных алгоритмов. Например, транспортное средство 200 может записывать постоянный μk для правой стороны пути 400. В этом случае правая сторона пути 400 будет производить один сегмент, продолжающийся от 401 до 407. Одновременно транспортное средство 200 будет записывать изменяющийся μk для левой стороны транспортного средства 200. В этом случае левая сторона пути 400 будет производить множество сегментов, продолжающихся от 401 до 407.
[0034] В различных вариантах выполнения транспортное средство 200 записывает и сохраняет сегменты максимальный ширины, такие как сегмент 406, но выбирает ширину для передачи (с помощью технологий между транспортным средствами или с помощью Интернета) на основе обнаруженной скорости беспроводного соединения. Например, если транспортное средство 200 обнаруживает высокую скорость беспроводного соединения, то транспортное средство 200 может передавать все ширины записанного сегмента. Если, однако, транспортное средство 200 обнаруживает низкую скорость беспроводного соединения, то транспортное средство 200 может передавать одну ширину для записанного сегмента.
[0035] Транспортное средство 200 может применять различные алгоритмы для выбора ширины (ширин) для передачи. В одном варианте выполнения транспортное средство 200 передает ширину, имеющую наименьший μk, и отмечает передаваемый μk как являющийся характерным для полного сегмента. Когда транспортное средство 200 передает менее полного количества ширин или характерную ширину (например, только ширину 406а), транспортное средство 200 отмечает передачу как являющуюся частичной. Когда транспортное средство 200 передает полное количество ширин, то транспортное средство 200 отмечает передачу как являющуюся полной. В различных вариантах выполнения транспортное средство 200 передает по меньшей мере одну характерную ширину для сохраненных, но не переданных сегментов, с заранее определенной частотой (например, 10 Гц).
[0036] Фигура 3 в общем показывает и иллюстрирует примерный случай использования для применения измеренного μk. Фигура 3 показывает дорогу 300 с полосами 301 и 302. Транспортное средство 200 (т.е. первое транспортное средство 200) движется впереди внешнего транспортного средства 305 (т.е. второго транспортного средства 305) по правой полосе 301. Масляное пятно 304 лежит на правой полосе 301. Масляное пятно 304 снижает коэффициент кинетического трения, μk, между транспортным средством, таким как транспортные средства 200 и 305, и дорогой 300. Таким образом, со ссылкой на Фигуру 3, коэффициент кинетического трения сегмента 305а будет высоким, коэффициент кинетического трения сегмента 305b будет низким и коэффициент кинетического трения сегмента 305с будет высоким. Эти отдельные сегменты 305а-305с могли быть сгенерированы согласно способам, ассоциированным с Фигурой 4. Несмотря на то, что Фигура 3 показывает масляное пятно 304, следует принимать во внимание, что масляное пятно 304 может представлять любое условие, придающее низкое динамическое трение, такое как лужа жидкой воды, лед или частицы песка.
[0037] Первое транспортное средство 200 имеет первое ускорение, a1, первую скорость, v1, и первое положение, p1. Второе транспортное средство 305 имеет второе ускорение, a2, вторую скорость, v2, и второе положение, p2. Первое транспортное средство 200 обнаруживает эти размеры путем применения датчиков 202 на Фигуре 2. Альтернативно или в дополнение, первое транспортное средство 200 загружает некоторые или всех из этих размеров со второго транспортного средства 305 (при условии, что второе транспортное средство 305 оборудовано с возможностью связи между транспортными средствами).
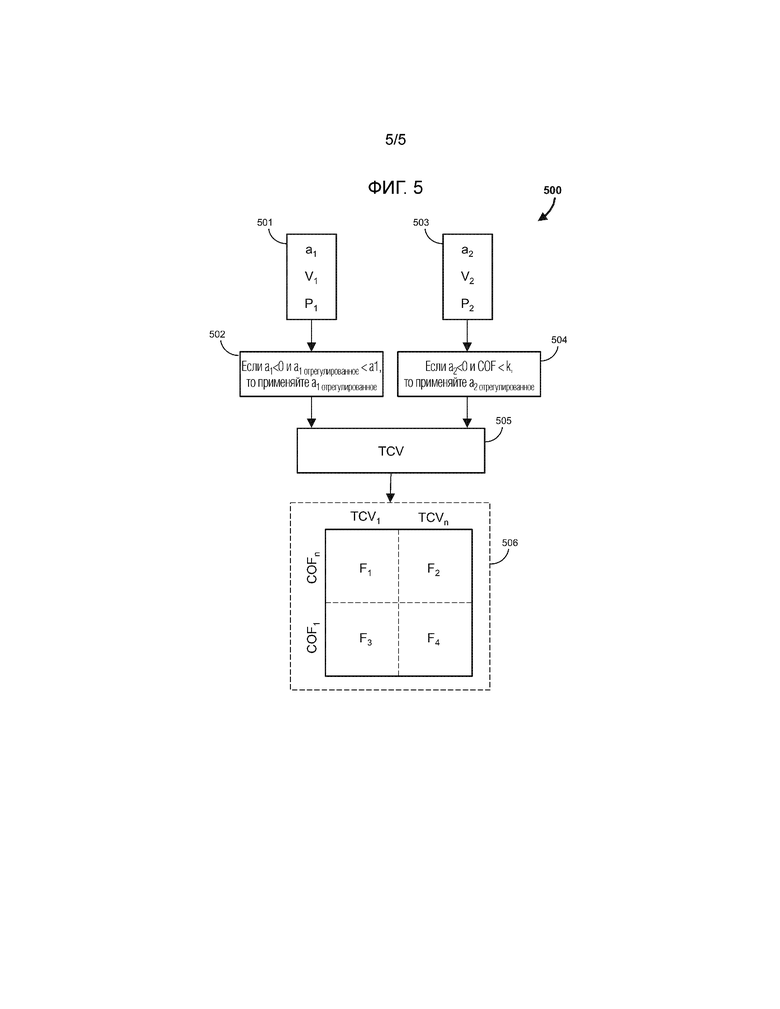
[0038] Фигура 5 показывает примерный алгоритм 500 для применения в случае использования на Фигуре 3. Алгоритм 500 спроектирован с возможностью давать теоретическую скорость столкновения (TCV) между первым транспортным средством 200 и вторым транспортным средством 305, затем применять TCV для предотвращения или смягчения столкновения. Конкретнее, алгоритм применяет TCV для регулировки частоты мигания тормозных световых приборов первого транспортного средства 200 и/или частоты/срочности передачи сигналов от первого транспортного средства 200 второму транспортному средству 305.
[0039] На этапе 501 первое транспортное средство 200 находит первое ускорение, первую скорость и первое положение. На этапе 503 первое транспортное средство 200 находит второе ускорение, вторую скорость и второе положение. Первое транспортное средство 200 использует эти размеры для нахождения TCV на этапе 505. В некоторых вариантах выполнения первое транспортное средство 200 регулирует первое ускорение на этапе 502 и ускорение на этапе 504, затем вычисляет TCV со ссылкой на отрегулированные ускорения.
[0040] В общем, этапы 502 и 504 учитывают сценарий худшего случая, где движущееся впереди транспортное средство (например, первое транспортное средство 200) замедляется ниже текущего измеренного первого ускорения и/или движущееся сзади транспортное средство (например, второе транспортное средство 305) ускоряется выше текущего измеренного второго ускорения. Этапы 502 и 504, таким образом, заменяют (в целях вычисления TCV на этапе 505) a1 на a1 отрегулированное и/или a2 на a2 отрегулированное, причем a1 отрегулированное меньше a1, а a2 отрегулированное больше a2.
[0041] Во время этапа 502 транспортное средство 200 определяет, является ли a1 положительным (ускорение), нулевым (движение накатом) или отрицательным (торможение). Если a1 является положительным или нулевым, то транспортное средство 200 не предпринимает никакого дальнейшего действия во время этапа 502 и применяет a1 во время этапа 505. Однако, если a1 является отрицательным, то транспортное средство 200 заменяет a1 на a1 отрегулированное в целях вычисления TCV на этапе 505. Конкретнее, транспортное средство 200 приблизительно определяет предполагаемый уровень замедления водителя. Предполагаемый уровень ускорения водителя может быть основан на степени давления, которое водитель приложил к педали тормоза. Если предполагаемый уровень ускорения водителя ниже, чем a1 (измеренное ускорение), то алгоритм 500 заменяет a1 на a1 отрегулированное. Предполагаемый уровень ускорения водителя будет ниже текущего ускорения, a1, когда транспортное средство скользит, и водитель нажимает на тормоз.
[0042] Во время этапа 504 транспортное средство 200 определяет, является ли a2 положительным (ускорение), нулевым (движение накатом) или отрицательным (торможение). Если a2 является отрицательным, и сегмент с характерным μk менее, чем заранее определенная постоянная, k (например, масляное пятно 304), существует на заранее определенном расстоянии или менее впереди второго транспортного средства 305, то первое транспортное средство 200 заменяет a2 на a2 отрегулированное в целях вычисления TCV на этапе 505. В различных вариантах выполнения a2 отрегулированное всегда меньше или равно нулю и представляет собой функцию от одного или более из a2 и характерного низкого μk. В различных вариантах выполнения заранее определенное расстояние представляет собой функцию от v2 так, что при большой v2 заранее определенное расстояние является большим (таким образом, охватывая больше сегментов), а при маленькой v2 заранее определенное расстояние является маленьким (таким образом, охватывая меньшее количество сегментов).
[0043] Во время этапа 505 транспортное средство 200 вычисляет теоретическую скорость столкновения на основе: a1 или a1 отрегулированное, v1, p1, a2 или a2 отрегулированное, v2 и p2. Теоретическая скорость столкновения представляет собой разность скоростей между первым транспортным средством 200 и вторым транспортным средством 305, если бы второе транспортное средство 305 врезалось сзади (т.е. сталкивалось с) первым транспортным средством 200. Другими словами, TCV=v1 при ударе - v2 при ударе. Кинетическая энергия объекта в движении зависит от его массы и скорости. TCV, таким образом, является хорошим средством прогнозирования значительности гипотетического столкновения.
[0044] Как отмечено выше, TCV зависит от v1 при ударе - v2 при ударе. Скорости при ударе зависят от текущих скоростей транспортных средств (v1 и v2), ускорений транспортных средств (a1 или a1 отрегулированное и a2 или a2 отрегулированное) и времени до удара/столкновения. Время до удара или столкновения представляет собой функцию от a1 или a1 отрегулированное, v1, p1, a2 или a2 отрегулированное, v2 и p2. Следует принимать во внимание, что с учетом вышеприведенных переменных вычисление TCV представляет собой непосредственное применение кинематических уравнений.
[0045] После вычисления TCV транспортное средство 200 выполнено с возможностью применения одной или более функций (или генерации одной или более команд), F, на основе одной или более справочных таблиц 506. Каждая справочная таблица 506 соотносит одну TCV (например, TCV1) с одним μk (например, COF1). Как отмечено выше, «COF» и «μk» имеют одинаковое значение в этом описании. Несмотря на то, что справочная таблица показана как имеющая две строки и два столбца, следует принимать во внимание, что справочная таблица может включать в себя любое число строк и столбцов (например, пятьдесят строк и пятьдесят столбцов).
[0046] TCV, применяемая в справочной таблице 506, представляет собой ближайшую TCV к TCV, вычисленной во время этапа 505. μk, применяемый в справочной таблице 506, представляет собой μk, сравненный с заранее определенной постоянной, k, во время этапа 504 и представляет наименьший коэффициент кинетического трения в пределах заранее определенного расстояния (которое представляет собой функцию от v2) впереди второго транспортного средства 305. Если никакой μk в справочной таблице не соответствует μk, применяемому во время этапа 504, то выбирают ближайший μk в справочной таблице.
[0047] На основе выбранной TCV (например, TCVn) и выбранного μk (например, COF1) транспортное средство 200 выбирает функцию (например, F4). Функция заставляет транспортное средство выполнять некоторое действие для предотвращения столкновения. Как изложено выше, могут существовать много справочных таблиц 506. Одна справочная таблица 506 может включать в себя функции, относящиеся к частоте мигающих тормозных световых приборов (объяснено ниже). Другая справочная таблица 506 может включать в себя функции, относящиеся к частоте или срочности сигнала, передаваемого от первого транспортного средства 200 второму транспортному средству 305.
[0048] Как изложено выше, первое транспортное средство 200 может быть выполнено с возможностью предупредительного мигания его тормозными световыми приборами для оповещения второго транспортного средства 305 о скользких условиях и тем самым предотвращения столкновения. В общем, когда TCV увеличивается (т.е. от TCV1 до TCVn), частота мигания тормозных световых приборов увеличивается (например, F2 представляет более большую частоту мигания тормозных световых приборов, чем F1). Когда COF уменьшается (например, от COFn до COF1), частота мигания тормозных световых приборов увеличивается (например, F3 представляет более большую частоту мигания тормозных световых приборов, чем F1). Интенсивность мощности, подаваемой к тормозным световым приборам (т.е. интенсивность подсветки тормозных световых приборов), может быть применена альтернативно или в дополнение к частоте. Цвет тормозных световых приборов может быть применен альтернативно или в дополнение к частоте и интенсивности мощности.
[0049] Как изложено выше, альтернативно или в дополнение к предупредительному миганию тормозными световыми приборами, транспортное средство 200 может быть выполнено с возможностью применения второй справочной таблицы 506 для регулировки частоты широковещательных передач второму транспортному средству 305. Широковещательные передачи могут включать в себя команду на остановку или замедление. В общем, когда TCV увеличивается (например, от TCV1 до TCVn), частота передачи увеличивается (например, F2 представляет передачу с более большой частотой, чем F1). Когда COF уменьшается (например, от COFn до COF1), частота передачи увеличивается (например, F3 представляет более большую частоту передачи, чем F1).
[0050] Первое транспортное средство 200 может применять подобную справочную таблицу 506 для регулировки приоритета, связанного с передачей сигналов (например, F4 указывает на высокой приоритет, тогда как F1 указывает на низкий приоритет). Первое транспортное средство может применять подобную справочную таблицу 506 для изменения частоты, с которой алгоритм на Фигуре 5 циклирует (например, алгоритм на Фигуре 5 циклирует или повторяется с низкой частотой, когда выбрана F1, но с высокой частотой при выбранной F4).
Предложено первое транспортное средство, содержащее датчики и процессоры. С помощью процессоров определяют с помощью датчиков трения дороги, по которой проезжало первое транспортное средство, и местоположение и ускорение движущегося сзади транспортного средства. С помощью процессоров вычисляют отрегулированное ускорение движущегося сзади транспортного средства, когда второе транспортное средство находится на заранее определенном расстоянии от части дороги с заранее определенным трением. С помощью процессоров вычисляют теоретическую скорость столкновения (TCV) на основе отрегулированного ускорения движущегося сзади транспортного средства и генерируют команды на основе TCV и выбранного коэффициента кинетического трения (COF). При этом сгенерированная команда автоматически заставляет первое транспортное средство предупредительно мигать тормозными световыми приборами с частотой, ассоциированной со сгенерированной командой. Предложены также транспортное средство и способ управления первым транспортным средством. Достигается предотвращение столкновений транспортных средств путем учета коеффициента кинетического трения. 3 н. и 14 з.п. ф-лы, 5 ил.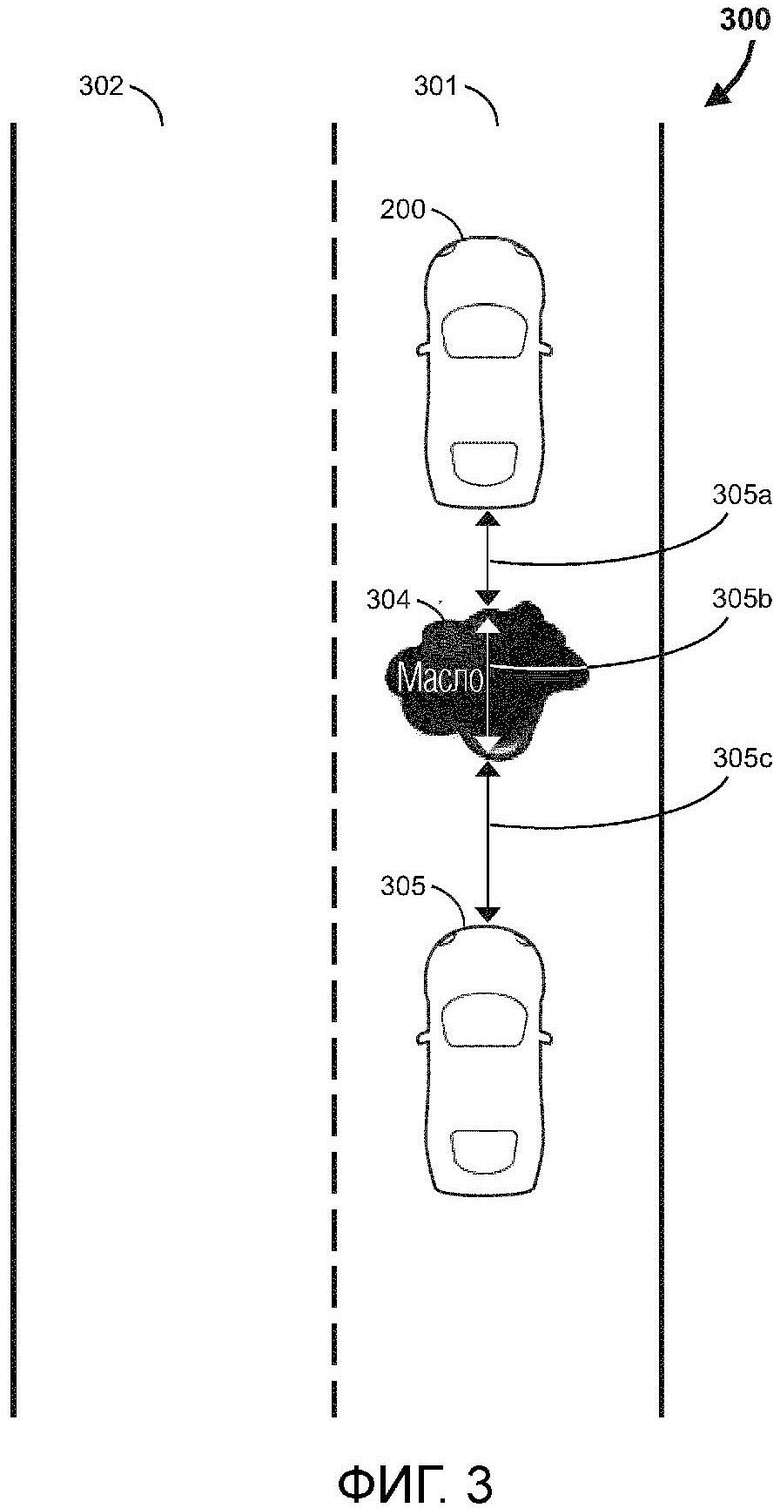
1. Первое транспортное средство, содержащее:
датчики; и
процессор(ы), выполненные с возможностью:
определения, с помощью датчиков: трений дороги, по которой проезжало первое транспортное средство; и
местоположения и ускорения движущегося сзади транспортного средства;
вычисления отрегулированного ускорения движущегося сзади транспортного средства, когда второе транспортное средство находится на заранее определенном расстоянии от части дороги с заранее определенным трением;
вычисления теоретической скорости столкновения (TCV) на основе отрегулированного ускорения движущегося сзади транспортного средства;
генерации команды на основе TCV и выбранного коэффициента кинетического трения (COF); и
при этом сгенерированная команда автоматически заставляет первое транспортное средство предупредительно мигать тормозными световыми приборами с частотой, ассоциированной со сгенерированной командой.
2. Первое транспортное средство по п. 1, в котором процессор(ы) выполнены с возможностью: выбора COF из сохраненной группы COF.
3. Первое транспортное средство по п. 2, в котором процессор(ы) выполнены с возможностью: построения группы COF из COF дороги, существующей между первым транспортным средством и движущимся сзади транспортным средством.
4. Первое транспортное средство по п. 1, в котором процессор(ы) выполнены с возможностью:
определения ускорения первого транспортного средства;
присвоения первого отрегулированного ускорения первому транспортному средству; и
вычисления TCV на основе первого отрегулированного ускорения.
5. Первое транспортное средство по п. 4, в котором процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству только тогда, когда ускорение первого транспортного средства меньше нуля.
6. Первое транспортное средство по п. 4, в котором процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству на основе определения, что ускорение первого транспортного средства меньше нуля.
7. Первое транспортное средство по п. 4, в котором процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения первому транспортному средству только тогда, когда первое отрегулированное ускорение меньше ускорения первого транспортного средства.
8. Первое транспортное средство по п. 1, в котором процессор(ы) выполнены с возможностью:
присвоения отрегулированного ускорения движущегося сзади транспортного средства движущемуся сзади транспортному средству только тогда, когда ускорение движущегося сзади транспортного средства меньше нуля.
9. Первое транспортное средство по п. 1, в котором процессор(ы) выполнены с возможностью:
присвоения отрегулированного ускорения движущегося сзади транспортного средства движущемуся сзади транспортному средству на основе определения, что ускорение движущегося сзади транспортного средства меньше нуля.
10. Первое транспортное средство по п. 1, в котором процессор(ы) выполнены с возможностью:
присвоения отрегулированного ускорения движущегося сзади транспортного средства движущемуся сзади транспортному средству только тогда, когда отрегулированное ускорение движущегося сзади транспортного средства больше, чем ускорение второго движущегося сзади транспортного средства.
11. Первое транспортное средство по п. 1, в котором сгенерированная команда автоматически заставляет первое транспортное средство передавать связь между транспортными средствами с частотой, ассоциированной со сгенерированной командой.
12. Транспортное средство, содержащее:
датчики; и
процессор(ы), выполненные с возможностью:
определения, с помощью датчиков: трений дороги, по которой проезжало транспортное средство; и
ускорения движущегося сзади транспортного средства;
вычисления отрегулированного ускорения движущегося сзади транспортного средства, когда второе транспортное средство приближается к части дороги с заранее определенным трением;
вычисления теоретической скорости столкновения (TCV) на основе отрегулированного ускорения движущегося сзади транспортного средства; и
мигания тормозными световыми приборами с частотой, на основе TCV и выбранного коэффициента кинетического трения.
13. Транспортное средство по п. 12, в котором процессор(ы) выполнены с возможностью:
определения, с помощью датчиков, ускорения транспортного средства;
присвоения первого отрегулированного ускорения транспортному средству; и
вычисления TCV на основе первого отрегулированного ускорения.
14. Транспортное средство по п. 13, в котором процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения транспортному средству только тогда, когда ускорение транспортного средства меньше нуля.
15. Первое транспортное средство по п. 13, в котором процессор(ы) выполнены с возможностью:
присвоения первого отрегулированного ускорения транспортному средству на основе определения, что ускорение транспортного средства меньше нуля.
16. Способ управления первым транспортным средством, содержащий этапы, на которых:
определяют, с помощью датчиков и процессора(ов):
трения дороги, по которой проезжало первое транспортное средство; и
местоположение и ускорение движущегося сзади транспортного средства;
вычисляют, с помощью процессора(ов), отрегулированное ускорение движущегося сзади транспортного средства, когда движущееся сзади транспортное средство находится на заранее определенном расстоянии от части дороги с заранее определенным трением;
вычисляют, с помощью процессора(ов), теоретическую скорость столкновения (TCV) на основе отрегулированного ускорения движущегося сзади транспортного средства;
генерируют, с помощью процессора(ов), команды на основе TCV и выбранного коэффициента кинетического трения (COF); и
при этом сгенерированная команда автоматически заставляет первое транспортное средство предупредительно мигать тормозными световыми приборами с частотой, ассоциированной со сгенерированной командой.
17. Способ по п. 16, содержащий также этап, на котором присваивают, с помощью процессора(ов), отрегулированное ускорение движущегося сзади транспортного средства движущемуся сзади транспортному средству только тогда, когда ускорение движущегося сзади транспортного средства меньше нуля.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

