Область техники
Настоящее изобретение в целом относится к области компьютерного управления процессом. В частности, настоящее изобретение относится к защищенной архитектуре для независимого от платформы выполнения операций управления процессом и приложений. В частности, настоящее изобретение относится к системе адаптивного управления процессом для независимого управления системами управления установками, причем установка, связанная с системой управления установкой, содержит множество взаимосвязанных элементов одного или более операционных блоков установки. В этих системах работой операционных блоков управляет система управления установкой посредством элементов, соединенных с системой управления установкой. И наконец, настоящее изобретение относится к универсальному человеко-машинному интерфейсу, основанному на системе адаптивного управления процессом.
Уровень техники
В последнее десятилетие значительные достижения в способах управления производственными процессами позволили значительно усовершенствовать все аспекты функционирования фабрик и заводов. До появления современных систем управления производственными процессами управляли люди с помощью рудиментарных механических устройств управления. Вследствие этого сложность и степень управления процессом были ограничены скоростью, с которой человек мог определить текущее состояние различных переменных состояния процесса, сравнить текущее состояние с требуемым рабочим уровнем, вычислить корректирующее действие (при необходимости) и произвести изменение контрольной точки для изменения переменной состояния. Усовершенствования способов управления процессом позволили управлять более крупными и более сложными производственными процессами с помощью программируемых управляющих процессоров. Управляющие процессоры выполняют программы управления и/или регулирования, которые считывают переменные состояния процесса, выполняют служебные команды, связанные с алгоритмами управления, на основе данных переменной состояния и требуемой информации о заданных значениях для вывода выходных значений для контрольных точек в производственных процессах. Такие управляющие процессоры и программы поддерживают осуществление по существу самовыполняющегося производственного процесса. Несмотря на возможность осуществления производственных процессов под управлением программируемых контроллеров процессов в соответствии с предварительно установленными рабочими параметрами без вмешательства человека, желательно осуществлять диспетчерское управление и мониторинг управляющих процессоров и связанных с ними процессов. Такой контроль осуществляют как люди, так и высокоуровневые управляющие программы на уровне интерфейса «приложение/человек» многоуровневой сети управления процессом. Как правило, такой контроль необходим для проверки правильности выполнения управляемого процесса низкоуровневыми контроллерами процессов и конфигурирования заданных значений управляемого процесса.
Системы управления производством и процессом модифицируют вследствие изменений в устройствах управления процессом и самих процессах. Таким образом, важно обеспечить средства для быстрого конфигурирования/переконфигурирования, не затрагивающие неизменяемые части системы. Также важно обеспечить средства для внесения таких изменений при минимизации перерывов в осуществлении производственного процесса, например, минимизации времени, в течение которого процесс находится в режиме ожидания. Кроме того, ввиду необходимости постоянного совершенствования систем диспетчерского управления процессом и технологической/производственной информации существует насущная необходимость в том, чтобы не фиксироваться на одной архитектуре системы диспетчерского управления процессом и производственной информации. Системы управления процессом изменяются и желательно иметь высокоуровневые системы, которые выполнены с возможностью внесения таких изменений независимо от их масштаба. Кроме того, менее гибкие варианты системы диспетчерского управления процессом и производственной информации требуют от разработчиков установок для управления процессом учета долгосрочных требований в отношении применения вследствие относительной негибкости применения в отношении модификации после установки. Такая негибкость применения систем управления установкой нежелательна, хотя в настоящий момент она неизбежно имеет место на консервативном рынке систем управления производственными процессами. Отрасль управления процессом демонстрирует тенденцию к экспериментированию и зачастую разработчики не в полной мере осознают степень и форму автоматизации, которые в конечном итоге будут применены в конечном варианте установки. Позже в ходе работы установки, когда новая функциональность добавлена, задействуют новые компоненты системы управления или объединяют с существующими системами. В таких случаях, когда система управления процессом значительно изменилась, предпочтительно включение другой архитектуры в установленное приложение диспетчерского управления процессом. В системах предшествующего уровня техники для целых, как правило, специфических систем управления установкой от конкретного производителя требуется дорогостоящая модернизация специалистами по программированию конкретного производителя.
Важной особенностью современных систем управления установками являются так называемые ПЛК (PLC), то есть программируемые логические контроллеры. Программируемый контроллер представляет собой электронный цифровой процессорный блок, используемый для автоматизации типовых производственных электромеханических процессов, таких как управление машинным оборудованием на заводских сборочных линиях, управляемых роботизированных производственных линиях или осветительными приборами. PLC используют во многих отраслях и машинах. PLC предназначены для применения в множестве аналоговых и цифровых входов и выходов, расширения температурных диапазонов, защиты от электрических помех и противодействия вибрации и ударам. Программы для управления работой машины, как правило, хранят в запоминающем устройстве с резервированием от батареи или энергонезависимом запоминающем устройстве. PLC представляет собой так называемую систему жесткого реального времени, поскольку выходные результирующие данные должны быть получены в ответ на входные условия в течение ограниченного времени, иначе произойдет непреднамеренная операция. До разработки ПЛК (PLC) логика управления, упорядочения и защитной блокировки для автоматизированных производственных линий и т. д. главным образом состояла из реле, кулачковых таймеров, барабанных командоаппаратов и специализированных контроллеров с обратной связью. Однако для более сложных процессов требовались сотни или тысячи таких устройств, а процесс обновления такого оборудования для ежегодного перехода на новую модель был чрезвычайно продолжительным и дорогостоящим, поскольку электромеханикам приходилось переподключать каждое реле для изменения его рабочих характеристик. Что касается программируемого аспекта PLC, можно отметить, что PLC является относительно небольшим устройством на основе процессора со встроенной операционной системой. Эта операционная система узкоспециализирована для обработки рассматриваемых входящих событий в реальном времени, т. е. во время их осуществления. PLC, выполненный с возможностью программирования пользователем, позволяет управлять работой соответствующей установки или т. п., причем PLC содержит указанные входные линии, к которым подключены датчики для регистрации событий (например, температура выше/ниже определенного уровня, достигнут определенный уровень жидкости и т. д.), и выходные линии для передачи сигнала о соответствующей реакции на входящие события (например, запустить двигатель, открыть/закрыть клапан и т. д.). Для PLC используют язык программирования, например, «релейная цепь» или RLL (логика релейной цепи). Как следует из названия «Логика релейной цепи», прежнюю логику управления, которая была построена на реле, смоделировали с помощью структуры служебных команд RLL. Другие структуры служебных команд для PLC из существующего уровня техники представлены, например, «схемой последовательных функций», «функциональной блок-схемой», «структурированным текстом» или «списком команд».
Таким образом, PLC являются устройствами для управления или регулирования машинного оборудования или промышленных установок. Используемые для этого элементы, как правило, размещают в так называемых модулях, причем модуль определяют как автономный объект, который может, в свою очередь, состоять из отдельных подсистем и компонентов. Таким образом, модуль является составной частью промышленной установки или системы автоматизации и с помощью своего программируемого логического контроллера выполняет функцию управления или регулирования соответствующего оборудования и машинного оборудования, входящего в состав установки. Модули представляют собой интерфейсы для производственных процессов. Ряд модулей позволяет включать всевозможные функции на модульной основе. Таким образом, модули поддерживают широкий спектр технологических задач и обеспечивают широкие коммуникационные возможности. При фактическом развертывании модуля необходимо, чтобы соответствующие компоненты установки или системы автоматизации были электрически подключены к модулю. Например, различные датчики и исполнительные механизмы, используемые для автоматизации установки, должны быть подключены к модулям, применяемым для обеспечения управления.
Как упомянуто выше, PLC, как правило, используют для управления машинным оборудованием. Управляющие последовательности, которые должны выполняться PLC, состоят из служебных команд, соответствующих инструкциям включения и выключения выходов на основании входных условий и внутренней управляющей последовательности. В отличие от обычных программ, управляющие последовательности PLC предназначены для однократного программирования и многократного выполнения при необходимости. Фактически, PLC могут управлять не только простыми устройствами, такими как открыватель гаражных ворот, но и целым зданием или заводом, в том числе включением и выключением освещения в определенное время, контролем индивидуализированной системы безопасности и т. д. Однако в производственной среде PLC, как правило, находятся внутри машины. PLC может запускать автоматическую машину в течение многих лет при незначительном вмешательстве человека. Они разработаны с возможностью выдерживать самые суровые условия.
Как упомянуто выше, структура PLC все еще отражает хронологическое управление машинами с помощью реле. Когда были разработаны первые электронные средства управления машиной, в них использовали реле для управления машинной логикой (т. е. нажать «Пуск» для запуска машины и нажать «Стоп» для остановки машины). Хотя для управления всеми функциями одной машины может потребоваться набор реле, покрывающих целую стену, эта базовая технология практически полностью устойчива к отказам. Есть только несколько ограничений и недостатков этого типа управления машиной, связанных с (i) отказом реле, (ii) задержкой при включении/выключении реле и (iii) наличием огромного количества реле, применяемых при проектировании/подключении/устранении неисправностей. Использование PLC позволяет избежать этих ограничений установки реле за счет его управляемой машиной работы.
Однако и PLC имеют недостатки. В последние годы PLC становятся все более и более интеллектуальными. PLC интегрируют в системы электрической связи (например, сети передачи данных). Таким образом, все PLC в производственной среде могут быть подключены к сети, которая, как правило, имеет иерархическую организацию. В таком случае работой PLC управляет центр управления. Существует множество специализированных типов сетей и систем управления процессом. Одним из широко известных типов является SCADA (диспетчерское управление и сбор данных). Однако большинство производителей PLC все же применяют собственные разработки. Как правило, PLC представляет собой специализированное управляемое процессором устройство для управления машиной, предназначенное для приема цифровых и аналоговых входных сигналов от различных датчиков, выполнения определяемой пользователем последовательности логических команд и выдачи результирующих цифровых и аналоговых выходных значений на различные выходные элементы, такие как гидравлические и пневматические исполнительные механизмы, индикаторные лампы, электромагнитные катушки и т. д. Что касается цикла сканирования, точные данные различаются для разных производителей, но большинство PLC поддерживают формат «цикл сканирования». Служебные операции PLC включают тестирование целостности модуля ввода/вывода, позволяющее убедиться в том, что логика последовательности пользовательских команд не изменилась, что сам блок управления не заблокирован (например, сторожевым таймером), и проверить любые другие необходимые коммуникации. Коммуникации могут включать поток данных через порт программирующего устройства PLC, удаленные стойки ввода-вывода и другие внешние устройства, такие как HMI (человеко-машинные интерфейсы ). Для сканирования входа PLC снимок цифровых и аналоговых значений, имеющихся на платах ввода, сохраняют в таблице входного запоминающего устройства. Для выполнения логики последовательность пользовательских команд, т. е. программу или алгоритм, поэлементно сканируют и последовательно выполняют, пока не будет достигнут конец последовательности, при этом результирующие значения записывают в таблицу выходного запоминающего устройства. В PLC для определения «причины и следствия» диагностику и связь используют разными способами с варьированием в использовании логики, аналитики и эксперимента. Преимущественно при разработке PLC их используют для определения причин симптомов, минимизации последствий, а также решений, которые затем передают в модуль ввода и/или используют для отправки соответствующих сообщений в модуль вывода для любых изменений файлов с неправильными данными. И наконец, для сканирования выхода значения из результирующей таблицы выходного запоминающего устройства записывают в выходные модули. Когда сканирование выхода будет завершено, процесс повторяют до тех пор, пока PLC не выключится. Затрачиваемое на выполнение цикла сканирования время, называемое временем цикла сканирования, составляет от сотен миллисекунд (как правило, на старых PLC и/или PLC с очень сложными программами) до нескольких миллисекунд на новых PLC и/или PLC, выполняющих короткий, простой код. Помимо этих общих функций, которые присутствуют практически во всех PLC, даже основные служебные команды значительно различаются у разных производителей PLC специфической номенклатурой и операционными элементами. Кроме того, часто детали реализации эволюционируют от поколения к поколению. Основным недостатком системы из предшествующего уровня техники является то, что, в частности, для неопытных операторов или программистов PLC практически не представляется возможным поддерживать номенклатуру непосредственно от производителя к производителю. Таким образом, существует сильная зависимость от производителя PLC для поддержания управления, функционирования и обновления системы или установки, которой управляют с помощью соответствующих PLC. Что еще хуже, если необходимо заменить, укомплектовывать, уменьшить или увеличить даже очень простые детали, для изменения или адаптации последовательности служебных команд PLC необходимо заплатить производителю за дорогостоящие формы операторов.
SCADA (диспетчерское управление и сбор данных), как упоминалось выше, как правило, относится к системе, работающей с кодированными сигналами по каналам связи для обеспечения управления удаленным оборудованием, таким как PLC, при этом, как правило, использующей один канал связи на удаленную станцию. Системы управления SCADA могут быть объединены с системой сбора данных путем добавления использования передачи кодированных сигналов по каналам связи для сбора информации о состоянии удаленного оборудования для отображения или для функций записи (см. документ B. Galloway et al., Introduction to Industrial Control Networks, IEEE Communications Surveys and Tutorials, 2012, который ниже включен посредством ссылки). SCADA относится к специальному типу системы управления производственными процессами (ICS). Системы управления производственными процессами представляют собой системы на базе процессоров, которые управляют существующими в материальном мире производственными процессами и контролируют их. Однако системы SCADA отличаются от других ICS-систем тем, что они способны поддерживать крупномасштабные процессы, которые могут включать множество объектов и предполагать большую отдаленность. Эти процессы включают производственные, инфраструктурные и объектно-ориентированные процессы, причем (i) производственные процессы включают производство, промышленную эксплуатацию, выработку энергии, обработку и переработку и могут быть выполнены в непрерывных, периодических, повторяющихся или дискретных режимах, (ii) инфраструктурные процессы включают, среди прочего, обработку и распределение воды, сбор и обработку сточных вод, нефте- и газопроводы, передачу и распределение электроэнергии, ветряные электростанции, системы выдачи сигналов воздушной тревоги гражданской обороны и большие системы связи, а (iii) объектные процессы происходят как в общественных, так и в частных объектах, включая здания, аэропорты, суда и космические станции. Эти процессы могут позволять контролировать системы отопления, вентиляции и кондиционирования воздуха (HVAC),доступ, потребление энергии и т. д., а также управлять ними.
Система SCADA, как правило, включает следующие подсистемы (или подключена к ним): (i) Удаленные терминальные устройства (RTU) подключают к применяемым в процессе датчикам, а сигналы датчиков преобразуют в цифровые данные. RTU содержат телеметрическое оборудование, способное отправлять цифровые данные в диспетчерскую систему, а также принимать цифровые команды от диспетчерской системы. RTU могут иметь встроенные возможности управления, такие как многоступенчатая логика для выполнения операций булевской логики; (ii) Программируемый логический контроллер (PLC), как уже обсуждалось выше, подключаемый к применяемым в процессе датчикам, преобразует сигналы датчиков в цифровые данные. PLC имеют более технологичные встроенные возможности управления (как правило, один или более языков программирования IEC 61131-3), чем RTU. PLC не содержат телеметрическое оборудование, хотя эту функциональность можно дополнительно установить. PLC иногда используют вместо RTU в качестве полевых устройств, поскольку они более экономичны, универсальны, гибки и конфигурируемы; (iii) Систему телеметрии, которую, как правило, используют для подключения PLC и RTU к центрам управления, хранилищам данных и предприятиям. Примеры проводных телеметрических сред, используемых в системах SCADA, включают выделенные телефонные линии и глобальные сети. Примеры беспроводных телеметрических сред, используемых в системах SCADA, включают спутниковые (VSAT), лицензированные и нелицензированные радио, сотовые и микроволновые среды; (iv) По меньшей мере один сервер сбора данных, т. е. управляемый программным обеспечением модуль, в котором используют промышленные протоколы для подключения программных служб посредством телеметрии к полевым устройствам, таким как RTU и PLC. Это позволяет клиентам получать доступ к данным с этих полевых устройств с использованием стандартных протоколов; (v) Человеко-машинный интерфейс (HMI), который представляет собой оборудование или устройство, которое предоставляет обработанные данные оператору-человеку, благодаря чему оператор-человек контролирует и взаимодействует с процессом. HMI представляет собой клиент, который запрашивает данные с сервера сбора данных; (vi) Так называемый программно-управляемый модуль сервера архивных данных, который накапливает в базе данных данные с привязкой ко времени, булевские события и булевские аварийные сигналы, которые могут быть запрошены или использованы для формирования графиков процесса в динамике в HMI. Сервер архивных данных представляет собой клиент, который запрашивает данные с сервера сбора данных; (vii) Диспетчерскую систему на основе процессора, собирающую (получающую) данные о процессе и отправляющую команды (управления) в систему SCADA; (ix) Инфраструктуру связи, соединяющую диспетчерскую систему с удаленными терминальными устройствами; и (x) Как правило, различные технологические и аналитические приборы. Таким образом, системы на базе SCADA позволяют обеспечить централизованные системы управления, которые контролируют и управляют всеми объектами, или комплексы систем, рассредоточенные в большой области (приблизительно от промышленного предприятия до государства). Большинство управляющих действий выполняются автоматически с помощью RTU или PLC. Функции управления хостом, как правило, ограничены базовым переопределением или диспетчерским уровнем вмешательства. Например, PLC может управлять расходом охлаждающей воды в рамках части производственного процесса. В настоящее время система SCADA позволяет операторам изменять заданные значения расхода и разрешать отображение и запись аварийных ситуаций, таких как снижение расхода и высокая температура. Контур управления с обратной связью проходит через RTU или PLC, а система SCADA контролирует общую производительность контура.
Следует отметить, что цифровые вычислительные устройства, такие как программируемые устройства общего назначения, также применялись для управления производственными процессами. Однако большинство систем управления установкой имеют специфический интерфейс и среду связи производителя, вследствие чего для осуществления доступа и управления системой управления установкой, как правило, требуются квалифицированные программисты, и включают строгий оперативный контроль окружающей среды. Кроме того, при использовании компьютера общего назначения для непосредственного управления процессом требуется защита этого компьютера от условий производственных цехов завода. Таким образом, компьютер для управления промышленными предприятиями должен иметь несколько отличительных признаков: он должен быть способным выдерживать условия окружающей среды, должен поддерживать дискретный (двоичный) вход и выход в легко расширяемом виде, не должен требовать долгого обучения и должна быть обеспечена возможность контроля его работы. Время реакции любой такой системы должно быть достаточно малым, чтобы ее можно было применять для управления, причем требуемая скорость может варьироваться в зависимости от характера процесса. Поскольку многие производственные процессы имеют временные рамки, в которых легко осуществить обращение благодаря миллисекундному времени реакции, современная (быстрая, малоразмерная, надежная) электроника значительно облегчает создание надежных контроллеров, в частности, потому, что может быть применено компромиссное соотношение производительности и надежности. Таким образом, в предшествующем уровне техники не обеспечивается универсальная система управления установкой, которая может быть легко применена к любой специфической системе управления конкретного производителя, независимая от платформы и которая удовлетворяет требованиям к системам управления промышленными установками.
В существующем уровне техники унифицированная архитектура OPC (OPC UA) известна как промышленный протокол связи M2M, предназначенный для обеспечения возможности взаимодействия оборудования. Архитектура OPC UA разработана консорциумом OPC Foundation и является преемником Open Platform Communications (OPC). OPC UA значительно отличается от своего предшественника. В отличие от оригинальной коммуникационной модели OPC OPC-UA обеспечивает межплатформенную сервис-ориентированную архитектуру (SOA) для управления процессом, одновременно повышая безопасность и обеспечивая информационную модель. Таким образом, OPC UA преодолевает проблемы запатентованной исходной OPC, которая была основана на обмене COM/DCOM на базе Microsoft Windows, причем DCOM является коротким для распределенной компонентной объектной модели, которая является запатентованной технологией Microsoft для связи между программными компонентами, распределенными по сетевым компьютерам. Протокол DCOM, также называемый «Network OLE», является расширением COM от Microsoft и обеспечивает кадр передачи данных в соответствии с инфраструктурой сервера приложения Microsoft COM+. Добавление символа «D» к COM подразумевает использование DCE/RPC (среда распределенных вычислений/удаленные вызовы процедур), а также модифицированной версии DCE/RPC, расширенной версии MSRPC (удаленный вызов процедуры, Microsoft) от Microsoft.
Как упомянуто выше, архитектура OPC UA является сервис-ориентированной архитектурой (SOA) и основана на различных логических уровнях. Основные службы OPC представляют собой абстрактные описания способов, которые независимы от протокола и обеспечивают основу для функциональности OPC UA. Транспортный уровень вставляет эти способы в протокол, а это означает, что он выполняет серилизацию/десерилизацию данных и передает их по сети. Для этой цели определены два протокола. Один из них представляет собой бинарный протокол TCP, оптимизированный для высокой производительности, а второй является веб-сервис-ориентированным. Информационная модель OPC представляет собой полноячеистую сеть на основе узлов, а узлы могут включать метаинформацию любого вида. Узлы сети OPC UA могут быть обработаны аналогично объектам в объектно-ориентированном программировании (ООП). Такие объекты могут содержать атрибуты доступа для чтения (DA, HDA), способы и инициированные события, которые могут быть переданы (AE, DataAccess, DataChange). Узлы содержат данные процесса, а также все другие типы метаданных. Таким образом, OPC UA обеспечивает два основных элемента. Прежде всего, специфический для Microsoft Windows протокол DCOM, который был основой предшественника OPC, заменен на открытые, независимые от платформы протоколы со встроенными механизмами безопасности. Во-вторых, функции OPC, такие как Data Access (Доступ к данным), Alarms & Events (Аварийные сигналы и события) и Historical Data Access (Доступ к хронологическим данным), перенесены в объектно-ориентированную модель и дополнены дополнительными функциями, такими как способы и системы типов. В результате интерфейс OPC UA может быть непосредственно интегрирован в системы на произвольных платформах с разными языками программирования и произвольные сложные системы могут быть полностью охвачены OPC UA. Правила объектно-ориентированного подхода, в соответствии с которыми структурировано адресное пространство сервера OPC UA, и интерфейс OPC UA для доступа принимают форму, при которой OPC UA можно рассматривать как язык программирования с сетевыми возможностями. Однако следует отметить, что OPC UA становится специализированной для средств автоматизации за счет применения специальных информационных моделей, таких как Data Access (Доступ к данным), Alarms & Conditions (Аварийные сигналы и состояния), Historical Access (Хронологические данные) и Programs (Программы).
OPC UA состоит из перечня спецификаций с описанием основных функций и информационных моделей, основанных на этих функциях, таких как Data Access (Доступ к данным) и Alarms & Conditions (Аварийные сигналы и состояния). Спецификации, которые определяют дополнительные информационные модели помимо указанных, как правило, называют Companion Specifications (дополнительными спецификациями). В предшествующем уровне техники были разработаны различные дополнительные спецификации OPC UA, определяющие информационную модель для специализированных отраслей промышленности или областей применения. Примером таких дополнительных спецификаций является спецификация OPC UA для анализаторов (ADI), которая была создана на основе требований заказчика и разработана рабочей группой членов OPC в рамках OPC Foundation, или информационная модель OPC UA для IEC 61131-3, которая была создана PLCopen, определяющая информационную модель OPC UA для стандарта, не связанного с OPC Foundation. И наконец, для использования OPC UA в управляемых или программируемых устройствах существует модель для конфигурирования аппаратных и программных компонентов, которая была создана общей рабочей группой OPC Foundation, Profibus User Organization (PNO), HART Foundation, Fieldbus Foundation (FF) и Field Device Tool (FDT) для стандартизованного конфигурирования полевых устройств. Эта базовая модель была выпущена OPC Foundation в качестве независимой информационной модели и в некоторых случаях послужила основой для дополнительных стандартов, таких как OPC UA для анализаторов и OPC UA для IEC 61131-3. Информационная модель определяет основные типы конфигурируемых компонентов и устройств; она определяет концептуальные представления для логического группирования параметров, способов и компонентов и определяет точки входа в адресное пространство сервера OPC UA. Кроме того, определяют информацию для идентификации устройств и доступных протоколов. Однако одним из основных недостатков OPC UA остается тот факт, что OPC UA позволяет обрабатывать и передавать только структурированные данные от одного клиента OPC UA другому клиенту OPC UA. Таким образом, OPC UA предоставляет лишь контейнер передачи данных, не позволяя непосредственно управлять любыми связанными с клиентом OPC UA в сети OPC UA удаленными устройствами или регулировать их.
Раскрытие сущности изобретения
Задача настоящего изобретения состоит в обеспечении системы и способа для систем управления работой установки и приложений диспетчерского управления процессом в отношении адаптации к меняющейся архитектуре системы управления процессом. Описана независимая от платформы система диспетчерского управления процессом и производственной информации, позволяющая легко разрабатывать и изменять структуру системы для индивидуального использования в соответствии с различными стандартами производителя системы установки. В соответствии с раскрытой многоуровневой архитектурой приложения объект приложения содержит обработчик. Обработчик размещен на платформе, которая соответствует, например, персональному компьютеру с инфраструктурным программным обеспечением. Промежуточный уровень обработчика абстрагирует объект приложения от архитектуры платформы. Таким образом, местоположение в специфичной для конкретного производителя физической системе, содержащей объект приложения, соответственно, для управления установкой, не должно рассматриваться в качестве задачи изобретения.
Согласно настоящему изобретению эти задачи решаются, в частности, с помощью отличительных признаков из независимых пунктов формулы изобретения. Кроме того, другие предпочтительные варианты осуществления могут быть получены из зависимых пунктов формулы изобретения и соответствующих описаний.
Согласно настоящему изобретению вышеупомянутые задачи, относящиеся к системам адаптивного управления процессом для независимого управления системами управления установкой, решают, в частности, в том аспекте, что обеспечивают систему адаптивного управления процессом для независимого управления системами управления установкой, причем установка, связанная с системой управления установкой, содержит множество взаимосвязанных элементов одного или более операционных блоков установки, причем работой операционного блока управляет система управления установкой посредством элементов, соединенных с системой управления установкой, и система адаптивного, независимого управления процессом доступна с помощью механизма обработки установки, в том аспекте, что механизм обработки установки содержит блок контроллера установки, соединенный посредством блока диспетчерского управления и сбора данных по меньшей мере с одним программируемым логическим контроллером (PLC) системы управления установкой, причем работой установки и операционных блоков управляют с помощью программируемого логического контроллера (PLC) и множества взаимосвязанных элементов, в том аспекте, что механизм обработки установки содержит блок-конструктор установки с библиотекой выбираемых записей команд управления процессом для каждого типа системы управления установкой, управляемой независимой системой управления процессом, причем работой соответствующей установки управляют с помощью команд управления процессом, присвоенных конкретному типу системы управления установкой посредством выбираемых записей команд управления процессом, в том аспекте, что механизм обработки установки содержит блок связывания и внедрения объектов для управления процессом, причем выбираемые из библиотеки команды управления процессом блок связывания и внедрения объектов для управления процессом преобразует в основные команды программируемого логического контроллера (PLC) и/или операции, интегрированные во все программируемые логические контроллеры (PLC) доступной системы управления установками. Блок диспетчерского управления и сбора данных может быть, например, функционально связан с системой управления установкой посредством архитектуры OPC-UA на базе открытого стандарта, расширяющей оперативную совместимость блока связывания и внедрения объектов для управления процессом с системами управления установкой и независимой системой управления процессом. Кроме того, программируемый логический контроллер (PLC) блока диспетчерского управления и сбора данных может, например, включать программируемый логический контроллер (PLC), соединенный с системой управления установкой посредством архитектуры OPC-UA на базе открытого стандарта, расширяющей оперативную совместимость блока связывания и внедрения объектов для управления процессом с защищенными системами управления установкой и клиентским устройством. Блок-конструктор установки с библиотекой выбираемых записей команд управления процессом для каждого типа системы управления установкой может, например, содержать унифицированный интерфейс программирования, причем функционирование соответствующей установки программируют и управляют ею с использованием команд языка программирования более высокого уровня посредством унифицированного интерфейса программирования, и команды языка программирования более высокого уровня преобразуют с помощью унифицированного интерфейса программирования в команды управления процессом из выбираемых записей библиотеки. Указанные команды языка программирования более высокого уровня могут, например, включать межплатформенные, объектно-ориентированные команды программирования. Указанные межплатформенные, объектно-ориентированные команды программирования могут, например, быть реализованы в виде JAVA- и/или JavaScript- и/или XML-команд. Настоящее изобретение имеет, среди прочих, преимущество, заключающееся в том, что касательно аппаратных средств изобретение позволяет снизить затраты за счет внедрения местными поставщиками локально разработанных проектов, которые отвечают рыночным требованиям, когда это необходимо. Аппаратная платформа будет более гибкой, поскольку изобретение позволяет интегрировать не только существующие стандартные платформы, но и альтернативные платформы. Например, для установки вальцовой мельницы настоящее изобретение позволяет интегрировать существующие стандартные платформы, например, Siemens и/или Allen Bradley, но также и альтернативные платформы, такие как Schneider, GE или Beckhoff. Таким образом, в настоящем изобретении предложена функциональная, независимая от платформы система для обеспечения управления установкой, регулирования, в частности, стандартного независимого дистанционного управления и автоматизации. Автоматизированные процессы и команды процесса можно дистанционно захватывать и управлять ними, причем удаленное вмешательство и адаптация процесса остаются возможными в любое время. Благодаря сочетанию платформы и независимого от стандарта управления может быть оптимально защищена внутрифирменная технологическая информация, без, например, раскрытия информации поставщика системы управления установкой. Кроме того, система управления установкой остается гибкой, адаптируемой к изменяющимся индивидуальным или специфическим эксплуатационным требованиям. Децентрализованная и адаптируемая система управления установкой с автоматизированным управлением функционированием позволяет оптимизировать и актуализировать последовательности процессов без адаптации системы управления установкой по месту эксплуатации, в частности, позволяя значительно увеличить мощность установки в ее обновленном состоянии и обеспечить высокий уровень качества продукции. Кроме того, планирование производства, диагностика и обеспечение качества могут быть осуществлены с помощью процесса и системы управления установкой согласно настоящему изобретению новым способом, применение которого невозможно с системами из предшествующего уровня техники и который в значительной степени упрощает планирование и техническое обслуживание системы дистанционного управления установкой. И наконец, адаптивная система также позволяет значительно снизить потребность в обслуживающем персонале, в результате чего снижается себестоимость продукции.
В одном варианте осуществления системы адаптивного независимого управления процессом дополнительная система (10) адаптивного, независимого управления процессом включает адаптируемый человеко-машинный интерфейс (HMI), причем блок диспетчерского управления и сбора данных, блок-конструктор установки и блок контроллера установки могут быть доступны с помощью адаптируемого человеко-машинного интерфейса, и блок диспетчерского управления и сбора данных функционально подключен для формирования устройства обработки, которое устанавливают в линию между системой управления установкой и клиентским устройством, подключенным к системе управления установкой, причем клиентское устройство содержит адаптируемый человеко-машинный интерфейс, причем блок управления и сбора данных управляет защищенной передачей структурированных данных между системой управления установкой и уровнем клиентского устройства, на котором функционирует клиентское устройство, доступным для блока диспетчерского управления и сбора данных, и структурированные данные обрабатывают и анализируют с помощью блока диспетчерского управления и сбора данных. Блок контроллера установки может быть, например, подключен через блок диспетчерского управления и сбора данных к программируемому логическому контроллеру (PLC) системы управления установкой и ним могут управлять посредством адаптируемого человеко-машинного интерфейса, причем операционными блоками управляют с помощью программируемого логического контроллера (PLC) и множества взаимосвязанных элементов. Кроме того, блок-конструктор установки может, например, содержать библиотеку выбираемых графических пиктограмм, причем эта библиотека доступна с помощью адаптируемого человеко-машинного интерфейса, причем выбираемая графическая пиктограмма соответствует операционному блоку установки, причем выбираемые графические пиктограммы выполнены с возможностью упорядочивания с помощью адаптируемого человеко-машинного интерфейса на модифицируемой панели потока управления адаптируемого человеко-машинного интерфейса, причем операционные блоки конфигурируют с помощью графических пиктограмм посредством настраиваемых полей ввода/вывода, связанных с элементами операционного блока, а их работу можно параметризировать с помощью настраиваемых полей ввода/вывода, и выбираемые графические пиктограммы панели потока управления могут быть привязаны с помощью выбираемых объектов многоступенчатого программирования для создания адаптируемого интерфейса с соответствующей системой управления установкой для управления этой системой управления установкой посредством выбираемых записей команд управления процессом. Указанные выбираемые объекты многоступенчатого программирования могут быть реализованы в виде указанных выбираемых записей команд управления процессом. Адаптируемый человеко-машинный интерфейс может, например, содержать отслеживающие объекты, динамически отслеживающие и указывающие параметры схемы работы установки. И наконец, работа установки может, например, быть доступной и корректируемой путем взаимодействия с отслеживающими объектами адаптируемого человеко-машинного интерфейса . Этот воплощенный вариант осуществления имеет, среди прочего, то преимущество, что он обеспечивает для пользователя системы управления установкой гибкость при выборе используемого устройства для человеко-машинного интерфейса не только для оператора, но также для связанных сервисов. Например, при использовании технологии HTML5 вместе с векторной графикой и дистанционной технологией для реализации человеко-машинного интерфейса настоящее изобретение позволяет пользователю выбирать любое требуемое устройство.
И наконец, в дополнение к вышеописанной системе и соответствующему способу настоящее изобретение также относится к универсальному человеко-машинному интерфейсу, который включает средство компьютерного программного кода для управления системой адаптивного управления процессом и, таким образом, системой управления установкой таким образом, чтобы система управления установкой функционировала надлежащим образом; и оно относится, в частности, к компьютерному программному продукту, который включает машиночитаемый носитель, содержащий средство компьютерного программного кода для процессоров системы адаптивного управления процессом.
Краткое описание чертежей
Настоящее изобретение будет объяснено более подробно на примере со ссылкой на чертежи, на которых:
На фиг. 1 представлена блок-схема, схематично изображающая пример системы 10 адаптивного управления процессом для управления процессом в установках и системах управления установкой в сети «машина-машина» («межмашинного взаимодействия» М2М) на основе OPC UA на основе способа согласно настоящему изобретению. Установка 30, связанная с системой 20 управления установкой, содержит взаимосвязанные элементы 32 одного или более операционных блоков 31 установки 30. Работой операционных блоков 31 управляют с помощью системы 20 управления установкой. Система 20 управления установкой доступна посредством независимой системы 10 управления процессом в сети «машина-машина» (M2M) посредством сетевых интерфейсов 16/202 с использованием клиентов 151/203 OPC UA, обеспечивающих сетевые узлы OPC UA для сервера 152 OPC UA. Система 10 управления процессом содержит механизм 11 обработки установки, причем механизм 11 обработки установки содержит блок 13 контроллера установки, соединенный через блок 12 диспетчерского управления и сбора данных посредством блоков ввода/вывода (I/O) с программируемыми логическими контроллерами 201/PLC, управляющими работой операционных блоков 31.
На фиг. 2 представлена еще одна блок-схема, схематично изображающая пример системы 10 адаптивного управления процессом для управления процессом в установках и системах управления установкой в сети «машина-машина» (М2М) на основе OPC UA на основе способа согласно настоящему изобретению. Для обеспечения комплексного группового управления для управления установкой 30 добавляют блок 205 программного PLC. Номером 153 позиции на фиг. 2 обозначен соответствующий блок связывания и внедрения объектов для управления процессом, например, также основанный на OPC UA, который позволяет обрабатывать и передавать структурированные данные с уровня PLC 201 на уровень ПК системы 10 адаптивного управления процессом для блока 205 программного PLC.
На фиг. 3 представлена блок-схема, иллюстрирующая взаимодействие блока 13 контроллера установки с блоком 15 связывания и внедрения объектов для управления процессом, причем выбираемые команды управления процессом преобразуют с помощью блока 13 контроллера установки и/или блока 15 связывания и внедрения объектов для управления процессом в основные команды программируемого логического контроллера 201/PLC и/или операции, интегрированные во все программируемые логические контроллеры 201/PLC доступной системы 20 управления установкой. Контроллер 13 установки управляет установкой как управляемым процессором устройством. Взаимодействие элементов блока (например, вальцовой мельницы) и управление ними осуществляют локально. С другой стороны, управление устройствами выполняют с помощью PLC. Эта концепция позволяет снизить сложность устройств, а также обеспечить гибкость и простоту программирования на ПК с использованием языков более высокого уровня, например, JAVA, для построителя структурного текста, т. е. полностью автоматизированной генерации команд управления PLC. Например, блок 13 управления установкой может быть по меньшей мере частично реализован как программируемый на JAVA контроллер. Идея настоящего изобретения позволяет осуществлять однонаправленное программирование, управляя и регулируя PLC 201 с помощью системы 10 управления процессом, реализованной, например, на ПК или даже на мобильном управляемом процессором сетевом узле. В случае необходимости комплексного группового управления система позволяет реализовать дополнительный программный PLC для управления установкой.
На фиг. 4 представлена блок-схема, схематично иллюстрирующая операцию управления и восстановления ввода/вывода PLC, причем операцию восстановления ввода/вывода выполняют после выполнения других команд.
На фиг. 5 представлена упрощенная блок-схема, схематично изображающая пример системы 10 адаптивного управления процессом для независимого управления системами 20 управления установкой. Номер 41 позиции относится к сети передачи данных/сети OPC UA, номер 151 позиции относится к клиенту OPC UA со стороны системы 10 управления процессом, номер 152 позиции относится к серверу OPC UA сети 41 OPC UA, номер 203 позиции относится к клиенту OPC UA со стороны систем 20 управления установкой, а номер 204 позиции относится к интерпретатору систем 20 управления установкой.
На фиг. 6 показано, как вышеописанные выражения и чертежи могут быть обработаны блоком 12 диспетчерского управления и сбора данных или пользователем с помощью HMI блока 12 диспетчерского управления и сбора данных.
Осуществление изобретения
На фиг. 1 схематично показана архитектура возможной реализации варианта осуществления способа и системы для управления процессом установок и систем управления установкой в сети «машина-машина» (М2М) на основе OPC UA на основе способа согласно настоящему изобретению. Установка 30, связанная с системой 20 управления установкой, содержит множество взаимосвязанных элементов 32 одного или более операционных блоков 31 установки 30. Например, на вальцовых мельницах операционные блоки 31 могут включать ролики, двигатели для приведения в движение подвесной тяги шлифовальных валиков, дорожки, дефлекторы, перемычки, элементы управления температурой или другим параметров в виде измерительных устройств, устройств останова и т. д. операционные блоки 31 зависят от типа 30 и конкретной технической реализации установки, к которой будут применены системы 20 управления установкой и система 10 адаптивного управления процессом. Взаимосвязанные элементы 32 образуют соединение между операционными блоками 31 и элементами ввода/вывода системы 20 управления установкой, соответственно, PLC 201 системы 20 управления установкой. Таким образом, система 20 управления установкой по меньшей мере содержит PLC 201, а также их интерфейсы и соединения с взаимосвязанными элементами 32, причем взаимосвязанные элементы обеспечивают соединение доступных сенсорных элементов и/или управляющих элементов и/или элементов сигнализации с операционными блоками 31. В частности, PLC 201 подключают к применяемым в процессе датчикам 32, а сигналы датчиков преобразуют в цифровые данные. PLC могут быть реализованы таким образом, чтобы они, например, имели такие возможности управления, как, например, применение языков программирования IEC 61131-3. В одном варианте осуществления PLC 201 могут быть по меньшей мере частично заменены подключаемыми к датчикам удаленными терминальными устройствами (RTU), которые преобразуют сигналы датчика в цифровые данные вместо PLC 201. RTU могут содержать телеметрическое оборудование, способное отправлять цифровые данные на диспетчерскую систему, а также принимать цифровые команды от диспетчерской системы. RTU могут иметь встроенные возможности управления, такие как многоступенчатая логика, для выполнения операций булевой логики. Работой операционных блоков 31 управляет система 20 управления установкой посредством элементов 32, соединенных с системой 20 управления установкой. Система 20 управления установкой доступна посредством независимой системы 10 управления процессом в сети «машина-машина» (M2M) посредством сетевых интерфейсов 16/202. Для управления установкой 30 и для ее регулирования между системой 10 управления процессом и системой 20 управления установкой передают сообщения, содержащие данные сигнализации и команды управления.
Система 10 управления процессом содержит механизм 11 обработки установки, причем механизм 11 обработки установки содержит блок 13 контроллера установки, соединенный посредством сетевых интерфейсов 16/202 с программируемыми логическими контроллерами 201/PLC, управляющими работой операционных блоков 31. Сетевые интерфейсы 16/202 взаимодействуют с сетью 41 OPC UA. Таким образом, система 10 управления процессом соединена посредством сети 41 OPC UA, содержащей клиенты 151/203 OPC UA, соответственно, вместе с сервером 152 OPC UA, по меньшей мере с одним программируемым логическим контроллером 201/PLC системы 20 управления установкой. Работой установки 30 и операционных блоков 31 управляют с помощью системы 20 управления установкой, содержащей программируемый логический контроллер 201/PLC, посредством множества взаимосвязанных элементов 32. Таким образом, работой установки 30 и операционных блоков 31 управляют посредством или с помощью программируемого логического контроллера 201/PLC. Взаимодействие блока 13 контроллера установки с блоком 15 связывания и внедрения объектов для управления процессом показано на фиг. 3, причем выбираемые команды управления процессом преобразуют с помощью блока 13 контроллера установки и/или блока 15 связывания и внедрения объектов для управления процессом в основные команды программируемого логического контроллера 201/PLC и/или операции, интегрированные во все программируемые логические контроллеры 201/PLC доступной системы 20 управления установкой. Контроллер 13 установки управляет установкой как управляемым процессором устройством. Взаимодействие элементов блока (например, вальцовой мельницы) и управление ними осуществляют локально. С другой стороны, управление устройствами выполняют с помощью PLC. Эта концепция позволяет снизить сложность устройств и обеспечить гибкость и простоту программирования на ПК с использованием языков более высокого уровня, например, JAVA. В частности, это позволяет реализовать систему управления процессом, выполненную с возможностью однонаправленного программирования и управления PLC системы 20 управления установкой. Например, блок 13 управления установкой может быть по меньшей мере частично реализован как программируемый на JAVA контроллер. Таким образом, идея изобретения позволяет осуществлять однонаправленное программирование и управление PLC с помощью системы 10 управления процессом, например, на ПК или даже на мобильных управляемых процессором системах. Готовые к выполнению команды управления PLC, встраиваемые в транспортный уровень OPC UA, генерирует контроллер 13 установки, реализованный, например, с помощью соответствующего обработчика Java. В случае необходимости комплексного группового управления система позволяет реализовать дополнительный программный ПЛК (PLC) для управления установкой.
В способе и системе согласно изобретению сеть 41 OPC UA с соответствующими узлами 151/203 и 152 сети OPC UA обеспечивает мост для системы 10 управления процессом и аппаратных средств управления процессом установки 30. Для передачи данных с помощью сети OPC UA 41 согласно изобретению используют стандарты OPC UA, определяющие соответствующий доступ к полевым данным с устройств из производственных цехов завода. Используемая структура OPC UA остается неизменной независимо от типа и источника данных. OPC-сервер 152 обеспечивает аппаратное устройство таким же доступом для любого OPC-клиента 151/203 с целью взаимного доступа. Таким образом, настоящее изобретение позволяет снизить трудозатраты производителей оборудования и их партнеров по программному обеспечению, а также производителей SCADA и других производителей HMI по взаимодействию с ними. Как только производитель оборудования интегрирует OPC-клиент 203 и интерпретаторы 204 в новую установку 30, систему 20 управления установкой или соответствующее аппаратное устройство, станет доступной система 20 управления установкой установки 30 или соответствующее аппаратное устройство, и указанной системой или указанным устройством можно будет управлять с помощью системы 10 управления процессом. Кроме того, производителю SCADA не нужно заботиться о доступе к какому-либо оборудованию, существующему или еще не созданному, поскольку это обеспечивает система 10 управления процессом, причем блок 12 диспетчерского управления и сбора данных является составной частью системы 10 управления процессом. В качестве варианта осуществления сервер 152 OPC UA или OPC UA для программного PLC 153 генерируют в системе 10 управления процессом или он является ее составной частью. Однако сервер 152 OPC UA также может быть реализован в виде независимого сетевого компонента, соответственно узла сети 41 OPC UA, например, в виде точки подключения, точки перераспределения или конечной точки связи (например, терминального оборудования обработки данных). Сеть 41 OPC UA реализуют в физической сети 41. Для обмена данными клиенты 151/203 OPC UA и сервер 152 OPC UA могут быть основаны на физическом сетевом узле, содержащем оборудование передачи данных (DCE) и/или терминальное оборудование обработки данных (DTE). Как будет подробно описано ниже, физическая сеть 41 может включать сеть LAN или WAN, в которой клиенты 151/203 OPC UA и сервер 152 OPC UA могут быть связаны с узлом LAN или WAN. В этом случае эти узлы LAN или WAN представляют собой устройства уровня канала передачи данных, имеющие MAC-адрес, как правило, один для каждого контроллера сетевого интерфейса, который они содержат, например, компьютеры, коммутаторы пакетов, модемы xDSL (с интерфейсом Ethernet) и точки доступа к беспроводной локальной сети. Если сеть 41 включает Интернет или Интранет, физические узлы этой сети могут быть реализованы на хост-компьютерах, также известных как Интернет-узлы, идентифицируемые по IP-адресу.
OPC-сервер 152 может быть реализован с возможностью обеспечения способа для множества различных программных пакетов (при условии, что они являются OPC-клиентами 151/203) для доступа к данным с устройств управления процессом, таких как система 20 управления установкой, PLC 201 или распределенные системы управления (DCS). Как правило, в любой момент, когда пакет затребует доступ к данным с устройства, пользовательского интерфейса или драйвера, данные должны быть выданы. Одним из преимуществ настоящего изобретения с использованием OPC UA является обеспечение общего интерфейса и устройства 10 управления процессом, которое записывает данные один раз и затем их может использовать повторно любая система 20 управления установкой в любой отрасли промышленности с помощью любых SCADA, HMI или пакетов специального программного обеспечения. Поскольку управление установкой 30 согласовано с клиентами 203 OPC UA, система 20 управления установкой может быть реализована непосредственно с помощью PLC 201 посредством распределенной системы управления (DCS), которая представляет собой систему управления процессом или установкой, в которой элементы управления распределены по всей системе, или нераспределенной системы, в которой используют один контроллер в центральном местоположении. В DCS иерархию контроллеров формируют с помощью клиентов 203 OPC UA для управления и мониторинга.
Примерами таких систем 20 управления установкой являются, например, мельничные установки, химические установки, нефтехимические и нефтеперерабатывающие установки, системы управления котлами и системы электростанций, ядерные энергетические установки, системы экологического контроля, системы управления водными ресурсами, металлургические установки, фармацевтическое производство, сахарорафинадные установки, сухогрузные и нефтеналивные суда, системы управления формированием многоагентных систем и т. д. Помимо клиента 203 OPC UA, обеспечивающего взаимодействие с сетью 41 OPC UA, в системах 20 управления установкой могут использовать специально разработанные процессоры в качестве контроллеров и/или использовать как собственный протокол взаимосвязи, так и стандартный протокол связи для осуществления внутренней связи, в виде, например, распределенной системы управления. Модули ввода и вывода представляют собой составные части систем 20 управления установкой. Такой процессор может принимать информацию от входных модулей и отправлять информацию на выходные модули. Модули ввода принимают информацию от входных приборов в ходе процесса (или в полевых условиях), а выходные модули передают инструкции выходным приборам в полевых условиях. Входные и выходные сигналы могут представлять собой либо аналоговые сигналы, которые непрерывно изменяются, либо дискретные сигналы, например, с двумя состояниями, вкл. или выкл. Компьютерные шины или электрические шины соединяют процессор и модули посредством мультиплексора или демультиплексоров. Кроме того, шины могут соединять распределенные контроллеры с центральным контроллером и/или, наконец, с человеко-машинным интерфейсом (HMI) или локальными панелями управления. Элементы систем 20 управления установкой могут быть непосредственно соединены с физическим оборудованием, таким как переключатели, насосы и клапаны, и/или посредством сети передачи данных, соответственно, сети 41 OPC UA с человеко-машинным интерфейсом (HMI) системы 10 управления процессом посредством блока 12 диспетчерского управления и сбора данных (SCADA). В качестве варианта осуществления функциональность систем 20 управления установкой и блока 12 диспетчерского управления и сбора данных также может быть реализована с частичным перекрытием. Таким образом, системы 20 управления установкой представляют собой специализированные системы, используемые для управления производственными процессами, которые являются непрерывными или пакетно-ориентированными, например, мельничные установки, нефтепереработка, нефтехимия, производство электроэнергии на центральных электростанциях, производство удобрений, фармацевтических препаратов, продуктов питания и напитков, цемента, сталелитейное производство и производство бумаги. Системы 20 управления установкой соединены с датчиками и исполнительными механизмами и в них используют управление по заданным значениям для управления расходом материала в установке. Наиболее типичным примером является контур управления по заданным значениям, состоящий из датчика давления, контроллера и управляющего клапана. Измеренные значения давления или расхода передают на контроллер, как правило, с помощью сигнала, формируемого устройством ввода/вывода (I/O). Когда измеряемая переменная достигает определенной величины, контроллер выдает на клапан или исполнительное устройство команду открытия или закрытия до тех пор, пока процесс течения жидкости не обеспечит достижение заданного значения. Крупные мельничные установки или нефтеперерабатывающие установки содержат много тысяч точек ввода-вывода и могут быть применены с очень большими системами 20 управления установкой. Однако процессы не ограничиваются протеканием текучей среды по трубам, а могут также включать, например, бумагоделательные машины и связанные с ними средства управления качеством, приводы с регулируемой частотой вращения и системы управления двигателем, цементобжигательные печи, горнодобывающие установки, установки для переработки руды и многое другое. В системах 20 управления установкой могут применять различные технологии, например, беспроводные системы и протоколы, дистанционную передачу, протоколирование и ведение архива хронологических данных, мобильные интерфейсы и элементы управления, а также встроенные веб-серверы. Предпочтительно системы 20 управления установкой становятся централизованными на уровне установки, облегчая возможность входа в систему с удаленного оборудования и системы 10 управления процессом. Это облегчает реализацию системы 10 управления процессом с ее человеко-машинным интерфейсом (HMI), в частности, с точки зрения удаленного доступа и портативности.
Система 10 управления процессом включает механизм 11 обработки установки с библиотекой 141 выбираемых записей 142 команд управления процессом для каждого типа системы 20 управления установкой, управляемой независимой системой 10 управления процессом. Работой соответствующей установки управляют с помощью команды управления процессом, присвоенной конкретному типу системы 20 управления установкой с помощью выбираемых записей команд управления процессом. Механизм 11 обработки установки включает блок 15 связывания и внедрения объектов для управления процессом. Выбираемые команды управления процессом из библиотеки 141 преобразуют с помощью блока 15 связывания и внедрения объектов для управления процессом в основные команды программируемого логического контроллера 201/PLC и/или операции, интегрированные во все программируемые логические контроллеры 201/PLC доступной системы 20 управления установкой. Каждый клиент 151/203 OPC UA на основе унифицированной архитектуры OPC генерируют в системе 10 управления процессом и в системе 20 управления установкой, причем транспортный уровень между клиентом 151 OPC UA системы 10 управления процессом и клиентом 152 OPC UA системы 20 управления установкой обеспечивают двунаправленно с помощью определенной двоичной последовательности, содержащей кодированные сообщения программируемого логического контроллера (201/PLC), а клиенты 151/203 OPC UA являются узлами сети OPC UA в сети 41 OPC UA с OPC UA-сервером 152 в качестве портала авторизации. Для управления установкой 30 и для ее регулирования система 10 управления процессом передает сообщения с командами программируемого логического контроллера 201/PLC на систему 20 управления установкой путем кодирования сообщений с командами PLC для транспортного уровня OPC UA и их передачи в транспортном уровне OPC UA с помощью определенной двоичной последовательности. Таким образом, кодированные сообщения с командами PLC транспортного уровня OPC UA содержат команды управления PLC. В одном варианте кодированные сообщения с командами PLC могут дополнительно содержать данные аутентификации, которые могут содержать, например, идентификатор (ID) и/или пароль и/или хеш-значение и/или IMSI SIM-карты, таим образом, чтобы соответствующий клиент 151/203 OPC UA мог быть надежно адресован системой 10 и/или системой 20 управления установкой. Система 20 управления установкой декодирует сообщения с командами PLC с помощью интерпретатора 204 из определенной двоичной последовательности и передает декодированные сообщения с командами PLC на соответствующий PLC 201 для выполнения. Система 20 управления установкой передает в транспортном уровне OPC UA с помощью определенной двоичной последовательности закодированные ответные сообщения PLC клиенту 151 OPC UA системы 10 управления процессом. Система 10 управления процессом декодирует и обрабатывает ответные сообщения PLC из двоичной последовательности для управления работой установки 30 и ее регулирования. PLC 201 системы 20 управления установкой осуществляют интерпретацию команд PLC, сгенерированных с помощью блока 13 управления установкой, например, реализованную с помощью интегрированного обработчика языка программирования высокого уровня, например, обработчика Java, либо непосредственно путем декодирования из транспортного уровня OPC UA, либо путем интерпретирования дополнительным программно реализованным блоком, действующим между интерпретатором 204 и PLC 201, или реализованным в виде части интерпретатора 204. Важно отметить, что предложенная в настоящем изобретении структура системы 10 управления процессом и системы 20 управления установкой позволяет осуществлять однонаправленное программирование PLC, т. е. однонаправленное управление, соответственно, установкой 30 и системой 20 управления установкой, полностью дистанционной в сети посредством системы 10 управления процессом.
Сетевой интерфейс 16 системы 10 управления процессом и сетевой интерфейс 202 системы 20 управления установкой может включать беспроводной сетевой интерфейс, например, карту беспроводного сетевого интерфейса (NIC). Соединение между клиентскими узлами 151/203 OPC UA, т. е. между системой 10 управления процессом и системой 20 управления установкой, также может быть реализовано с помощью проводных сетевых интерфейсов 151 или 203, например, посредством Ethernet. ГИС из IPASS также работает с применением перемещаемого проводного доступа. Таким образом, система 10 управления процессом и система 20 управления установкой содержат всю необходимую инфраструктуру, включая аппаратные и программные компоненты, имеющиеся в них для осуществления описанного доступа в сеть и передачи данных по сети 41 согласно настоящему изобретению. Сеть 41 передачи данных может включать общеизвестную сеть Интернет в качестве глобальной магистральной сети. Система 10 управления процессом может быть реализована как связанная со всеми возможными видами так называемого абонентского оконечного оборудования (CPE), предназначенного для использования в различных местоположениях в сети и/или в различных сетях. Кроме того, узел 151 сети OPC UA, например, реализованный на CPE, и узел 203 сети OPC UA могут осуществлять доступ к сети 41 с помощью одного или более различных физических сетевых интерфейсов 16/202, которые также могут поддерживать множество различных сетевых стандартов. Таким образом, номера 16/202 позиций представляют собой соответствующие карты сетевого интерфейса (NIC). Физические сетевые интерфейсы узлов могут содержать, например, интерфейсы WLAN (беспроводной локальной сети), Bluetooth, GSM (глобальной системы мобильной связи), GPRS (системы пакетной радиосвязи общего пользования), USSD (неструктурированных дополнительных сервисных данных), UMTS (универсальной системы мобильной связи) и/или Ethernet или другой проводной LAN (локальной сети) и т. д. Соответствующая номеру 41 позиции сеть может быть основана на стандарте IEEE 802.11 или других стандартах или может включать различные гетерогенные сети, такие как, например, сеть Bluetooth, например, для установок в крытых зонах, мобильную радиосеть GSM и/или UMTS и т. д., беспроводную локальную сеть, например, на основе беспроводного IEEE-стандарта 802.1x, или также проводную локальную сеть, т. е. локальную фиксированную сеть, в частности, также PSTN (телефонную коммутируемую сеть общего пользования), и т. д. Следует отметить, что по существу способ и/или система согласно настоящему изобретению не привязаны к конкретному сетевому стандарту, причем имеющиеся признаки согласно настоящему изобретению могут быть достигнуты и с использованием любой реализуемой технической структуры сети OPC UA. Интерфейсы 16/202 сетевых узлов 151/203 могут представлять собой не только интерфейсы с коммутацией пакетов, непосредственно используемые сетевыми протоколами, например, Ethernet или Token Ring, но также могут представлять собой интерфейсы с коммутацией каналов, которые могут быть использованы с протоколами, такими как PPP (протокол «точка-точка», см. документацию IETF RFC), SLIP (протокол последовательной межсетевой связи) или GPRS (системы пакетной радиосвязи общего пользования), т. е. интерфейсы, которые, например, не предполагают наличие сетевого адреса, такого как адрес MAC или DLC. Как, в частности, указано выше, сообщение может, например, проходить по локальной сети, например, посредством специальных коротких сообщений, например, SMS (службы передачи коротких сообщений), EMS (улучшенной службы передачи коротких сообщений), по каналу сигнализации, например, USSD (неструктурированных дополнительных сервисных данных), или по каналу, основанному на других технологиях, например, MExE (среда выполнения мобильных приложений), GPRS (системы пакетной радиосвязи общего пользования), WAP (прикладной протокол беспроводной связи) или UMTS (универсальная система мобильной связи), по каналу на основе беспроводного IEEE-стандарта 802.1x или по другому каналу пользовательской информации.
Блок 12 диспетчерского управления и сбора данных работает с закодированными сигналами по каналам 40 связи, обеспечивая управление удаленным оборудованием, т. е. программируемыми логическими контроллерами 201/PLC, управляющими работой операционных блоков 31, например, путем использования одного канала связи на удаленную станцию 20, т. е. систему 20 управления установкой, или программируемые логические контроллеры 201/PLC. Блок 12 диспетчерского управления и сбора данных в данном случае адресует, среди прочего, процесс мониторинга и аналитической обработки данных. Блок 12 диспетчерского управления и сбора данных может быть реализован как чистая веб-система. Магистральная линия связи блока 12 диспетчерского управления и сбора данных может быть реализована с использованием OPC UA (унифицированной архитектуры OPC), которая позволяет системе обрабатывать и передавать структурированные данные с уровня PLC в механизм 11 обработки установки, причем механизм 11 обработки установки может быть, например, реализовано в виде блока и/или системы на основе процессора и/или с управлением по процессам или в более общем случае на основе обычных компьютерных аппаратных средств, например, ПК (персонального компьютера). OPC UA представляет собой технический протокол связи «машина-машина» (M2M) для взаимодействия, разработанный консорциумом OPC (Open Platform Communications, открытая коммуникационная платформа) Foundation. M2M относится к технологиям, которые позволяют как беспроводным, так и проводным системам взаимодействовать с другими устройствами того же типа. M2M может включать содержащие технические приборы устройства (например, датчик или измеритель) для захвата информации о событии (например, температуры, уровня запасов и т. д.), которую передают по сети (беспроводной, проводной или гибридной) в приложение (программный продукт), которое переводит или преобразует захваченное событие в техническую, требуемую в другой форме, необходимую информацию (например, сигнализацию о запуске предварительно определенных событий). Основные службы протокола связи OPC UA представляют собой абстрактные структуры способа, которые независимы от протокола и обеспечивают основу для функциональности OPC UA. Но при всей своей оперативной совместимости транспортный уровень OPC UA лишь вставляет эту структуру в протокол, а это означает, что он выполняет серилизацию/десерилизацию данных и передает их по сети. Для этой цели определены два протокола. Один из них представляет собой бинарный протокол TCP, оптимизированный для высокой производительности, а второй является веб-сервис-ориентированным. Обработчик OPC UA имеет простую структуру передачи данных, причем информационная модель OPC основана на полноячеистой сети с соответствующими узлами. Эти узлы могут включать метаинформацию любого типа. Эти узлы могут содержать атрибуты доступа для чтения (DA, HDA), команды и инициированные события, которые могут быть переданы (AE, DataAccess, DataChange). Узлы содержат данные процесса, а также все другие типы метаданных, а передаваемые данные и/или метаданные не являются передаваемыми в зависимости от типа. OPC UA поддерживает два протокола, один из которых является бинарным протоколом, а другой представляет собой обычный протокол веб-сервиса (http). Кроме того, OPC UA работает совершенно прозрачно для любого интерфейса прикладного программирования (API). Как правило, бинарный протокол обеспечивает наивысшую производительность/наименьшие непроизводительные затраты, требует минимум ресурсов (не требуется синтаксический анализатор XML, протокол простого доступа к объектам (SOAP) и протокол передачи гипертекста (HTTP), что важно для встроенных устройств), обеспечивает лучшую совместимость (бинарные данные точно определяются и допускают меньше степеней свободы во время реализации) и использует один произвольно выбираемый TCP-порт для упрощения процесса туннелирования или простой реализации через межсетевой экран для осуществлении связи.
Как упомянуто выше, работой установки 30 и операционных блоков 31 управляют с помощью программируемого логического контроллера 201/PLC и множества взаимосвязанных элементов 32, например, датчиков. С помощью программируемых контроллеров (PLC) команды из программ управления, мониторинга и регулирования выполняют одну за другой и обрабатывают путем считывания и записи информации во внутреннюю область запоминающего устройства PLC, которую, как правило, называют запоминающим устройством ввода/вывода. В определенное время происходит обмен пакетами данных между датчиками/переключателями, которые непосредственно связаны с базовым блоком ввода/вывода, с внутренним запоминающим устройством ввода/вывода PLC. Этот процесс полного обмена внешними данными и внутренними данными запоминающего устройства ввода/вывода называют операцией восстановления ввода/вывода. При рассмотрении работы системы управления установкой и исполнения кода, созданного для управления установкой, определяют временные характеристики выполнения восстановления ввода/вывода. В предпочтительном варианте PLC эту операцию восстановления ввода/вывода выполняют сразу же после выполнения всех остальных команд, как это показано на фиг. 4. В этой структуре блок 12 диспетчерского управления и сбора данных выполнен с возможностью осуществления визуализации процесса и анализа данных процесса. Магистральной линией связи для блока 12 диспетчерского управления и сбора данных является блок 15 связывания и внедрения объектов для управления процессом, например, на основе вышеуказанного транспортного уровня OPC UA, который позволяет обрабатывать и передавать структурированные данные с уровня PLC на уровень ПК системы 10 адаптивного управления процессом. Блок 15 связывания и внедрения объектов для управления процессом подробно описан ниже.
На фиг. 5 схематично показана структура OPC UA между системой 10 управления процессом, системой 20 управления установкой и PLC 201. Номер 1 позиции относится к системе 10 адаптивного управления процессом, содержащей необходимое управляемое процессором оборудование, например, ПК или т. п., 2 относится к соединению клиента OPC UA с системой 10/41 управления процессом, 3 представляет собой сервер OPC UA, 4 представляет собой соединение клиента OPC UA с интерпретатором 204, причем интерпретатор взаимодействует, соответственно, с системой 20 управления установкой и PLC 201. В качестве варианта клиент OPC UA может проверять, что именно поддерживает сервер. Таким образом, он может получать информацию, если сервер, например, поддерживает только функциональность DA или дополнительно AE, HDA и т. д. Клиент 4 OPC UA и интерпретатор 204 могут быть реализованы вместе с PLC 201 как, например, (составная) часть системы 20 управления установкой.
Блок 20 диспетчерского управления и сбора данных может быть полностью основан на веб-технологиях. Как показано на фиг. 5, основной шлюз передачи данных блока 20 диспетчерского управления и сбора данных основан на OPC UA, что позволяет передавать структурированные данные от системы 10/41 управления процессом, например, реализованной на ПК, на PLC 201 и наоборот. Для типов PLC, которые не поддерживают OPC UA, используют драйвер или интерпретатор 204 для преобразования протокола. Полная система может состоять по меньшей мере из следующих элементов: (i) Блок 12 диспетчерского управления и сбора данных в качестве сервера (работает на аппаратном обеспечении на базе ПК), подключаемый к PLC с применением OPC UA непосредственно или посредством драйвера OPC. Блок 12 диспетчерского управления и сбора данных (SCADA) может использовать интегрированный веб-сервер для блока-конструктора 14 установки и человеко-машинного интерфейса (HMI). Блок 12 диспетчерского управления и сбора данных сам по себе может выступать не только в качестве клиента OPC UA, но также в качестве сервера 3 OPC UA, который используют для осуществления связи с PLC 201, контроллером, т. е. блоком 13 контроллера установки, системой блока 12 диспетчерского управления и сбора данных, возможно с инструментами архивирования и др., (ii) Блок-конструктор 14 установки, который является инструментом для инженеров по проектированию и настройке фактической установки; (iii) Динамический HMI, с помощью которого конечный пользователь контролирует установку 30 и управляет ею; (iv) Долговременную статистику могут хранить и управлять ею с помощью внешнего инструмента архивирования с собственным инструментом генерации отчетов; (v) Сервер архивных данных также может быть установлен в отдельной системе; (vi) Блок 13 контроллера установки, который является основным модулем для управления процессом. Он управляет взаимодействием, ходом выполнения (последовательностями запуска и останова), управляет заданиями и данными, управляет линиями и разделами, а также реализует такие функции, как управление положением, контроль засоренности, обработка параметров; (vii) OPC UA-совместимый PLC 201, который непосредственно соединен с сервером OPC-UA, другие PLC могут быть подключены с помощью драйвера OPC; и (viii) Возможно, интерфейс веб-браузера, причем проектирование с помощью блока-конструктора 14 установки, а также функционирование установки 30 может быть запущено в веб-браузере.
Вышеупомянутый блок 13 контроллера установки в составе системы 10 адаптивного управления процессом управляет установкой 30 и системой 20 управления установкой с ПК, если система 10 адаптивного управления процессом реализована на ПК. Взаимодействие и управление операционными блоками 31 установки 30 (например, установки вальцовой мельницы) осуществляют локально в системе 10 адаптивного управления процессом. Управление операционными блоками 31, с другой стороны, выполняют на PLC 201. Эта концепция позволяет снизить сложность устройств и обеспечить гибкость и простоту программирования на ПК с использованием языков более высокого уровня, например JAVA. В качестве варианта осуществления обеспечения комплексного группового управления может быть добавлен блок 202 программного PLC для управления установкой, как показано на фиг. 2. Номером 151 позиции на фигуре обозначен связанный блок связывания и внедрения объектов для управления процессом, например, также основанный на OPC UA, который позволяет обрабатывать и передавать структурированные данные с уровня PLC на уровень ПК системы 10 адаптивного управления процессом для блока 202 программного PLC.
Что касается цикла обработки PLC, как правило, продолжительность цикла представляет собой время от выполнения (начала) операции восстановления ввода/вывода до выполнения (обработки) следующего восстановления ввода/вывода. Время цикла включает время обработки заголовков (самодиагностика), выполнения пользовательских программ, обработки восстановления ввода/вывода и обработки вспомогательных сервисов. Если время цикла является большим, продолжительность цикла обновления данных вследствие пределов PLC и время реакции ввода/вывода также являются большими, что делает невозможной реализацию изменений, которые вводят быстрее, чем длится цикл. Если продолжительность цикла невелика, время реакции ввода/вывода также сокращается, что позволяет достичь высокой скорости обработки. По мере изменения продолжительности цикла также изменяется продолжительность цикла выполнения команды и время реакции ввода/вывода. Команды, переданные системой 10 адаптивного управления процессом, выполняют одновременно с обработкой восстановления ввода/вывода и т. д., в пределах цикла обработки PLC. Однако задачи прерывания могут, например, выполнять перед этим циклом обработки. В случае выполнения определенных условий прерывания цикл обработки будет приостановлен, и в первую очередь будут выполнены задачи прерывания. Например, задачи прерывания могут включать прерывание выключения, запланированные прерывания, прерывания ввода/вывода, периодические прерывания на основе внутреннего таймера и внешние прерывания.
Чтобы система 10 адаптивного управления процессом использовала сигналы ввода/вывода от блоков ввода/вывода, установленных на PLC, сначала необходимо назначить адрес в запоминающем устройстве ввода/вывода PLC. Выделение памяти ввода/вывода для ввода или вывода из этих блоков в PLC известно как распределение ввода/вывода. Эту информацию о распределении ввода/вывода используют в операции восстановления ввода/вывода с подключением устройств в качестве системы 10 адаптивного управления процессом. В данном случае взаимодействия системы 10 адаптивного управления процессом с помощью PLC 201 системы 20 управления установкой эта информация о распределении ввода/вывода может, например, быть записана в PLC в «Таблицу регистрации ввода/вывода». Эта «Таблица регистрации ввода/вывода» может быть создана путем автоматической регистрации в режиме онлайн с помощью системы 10 адаптивного управления процессом, использующей информацию от встроенного в PLC блока, или путем использования системы 10 адаптивного управления процессом для расчета в режиме офлайн, а затем автоматической регистрации путем передачи таблицы ввода/вывода на PLC. Однако для некоторых систем 20 управления установкой может не требоваться создание таблицы регистрации ввода/вывода, а другие системы могут не поддерживать расчет таблиц ввода/вывода в режиме офлайн.
PLC 201, как правило, использует множество различных данных, включая внешние программные коды, в качестве команд, передаваемых системой 10 адаптивного управления процессом, данные и комментарии запоминающего устройства ввода/вывода, параметры блока ЦП и специальных блоков ввода/вывода, а также информацию о таблицах регистрации ввода/вывода и т. д. Все эти данные, используемые PLC 201, сохраняют в области запоминающего устройства в блоке ЦП PLC 201. Область запоминающего устройства PLC 201, как правило, включает область пользовательской программы, в которую записывают пользовательские программы, переданные внешними устройствами, в качестве системы 10 адаптивного управления процессом. Кроме того, она содержит область запоминающего устройства ввода/вывода, к которой обращаются командные операнды. В нее записывают информацию, такую как CIO, внутренняя область ввода/вывода, область хранения, вспомогательная область, область DM, область EM, флаги завершения/текущее значение таймера, флаг завершения/текущее значение, флаги задач, индексный регистр, регистр данных, флаги состояния, синхронизирующий импульс и т. д. Данные в области запоминающего устройства ввода/вывода, как правило, расположены в областях, в которых очистку содержимого выполняют каждый раз при повторном включении питания, а также в областях, в которых хранится предварительная информация. И наконец, она содержит область параметров, которая содержит всю информацию, касающуюся начальных параметров, используемых PLC. В эту область запоминающего устройства записывают такую информацию, как параметры системы PLC, зарегистрированная таблица ввода/вывода, таблица маршрутизации и настройка PLC для шинного блока ЦП. PLC 201 содержат базовые функции, установленные ранее и обычно устанавливаемые в PLC 201. Однако при добавлении блоков управления процессом на основе PLC к базовой конфигурации системы функции управления процессом PLC 201 могут быть просто добавлены к базовым функциям, уже установленным в PLC 201. Важно отметить, что для системы 20 управления установкой эти дополнительные функции управления процессом PLC 201 отличаются у разных производителей. Таким образом, ее можно использовать только для устройств, которые совместимы с системой управления процессом, в которой раньше использовали систему 20 управления установкой, или для устройств, в которых использовали комбинацию из нескольких контроллеров, и которые являются совместимыми. Одно значительное преимущество настоящего изобретения состоит в том, что в системе 10 адаптивного управления процессом используют только базовые функции, уже установленные в PLC 201, и поэтому она пригодна для использования независимо от платформы и производителя со всеми возможными типами систем 20 управления установкой.
Следует отметить, что большая часть процесса разработки программного обеспечения может состоять, например, из визуального программирования, конфигурирования и моделирования, профессиональные навыки для осуществления которых являются легкодоступными в области техники. Основное программное обеспечение PLC 201 может быть сведено к минимуму и может включать лишь функции базового управления каждым устройством с использованием в большинстве случаев графического языка, называемого схемой многоступенчатой логики, которая является стандартизованным языком программирования IEC 61131-3, который, как правило, понимает электротехнический персонал. Запуском, выключением и взаимодействием каждого блока, запрограммированного в PLC 201, управляют с помощью системы согласно настоящему изобретению посредством графических схем, смоделированных и выполненных на ПК, под управлением системы 10 управления процессом с применением графического способа, что упрощает не только проектирование проекта, но и позволяет любому специалисту в данной области техники понять суть процесса и верифицировать процесс. Эти графические схемы могут составлять часть технических требований к системе и заменять письменные разъяснения функциональности управления графическим способом, доступным для понимания любым специалистом. Такой подход также повышает гибкость для удовлетворения индивидуальных потребностей клиентов и часто меняющихся потребностей локального рынка.
Предлагаемая в настоящем изобретении система позволяет осуществлять автоматизацию системы управления установкой, которая включает аппаратные средства в виде распределительных щитов, шкафов управления, PLC (программируемых логических контроллеров), кабельных систем и/или управляемых процессором систем, таких как ПК, и программное обеспечение (программное обеспечение для проектирования и обработки) путем создания независимой от платформы системы 10 управления процессом с интерпретатором 204. Она позволяет передать основную часть управления, которую, как правило, выполняют на PLC 201, в систему 10 управления процессом, например, запускаемую на ПК. Управление может быть спроектировано с получением независимых от платформы процесса и рабочего кода более высокого уровня. Система преобразует код в универсальные команды, которые понятны для всех PLC 201. Для управления установкой 30 система 10 управления процессом осуществляет следующие этапы: (i) Определение и генерирование элементов, необходимых для управления установкой 30; (ii) Считывание и загрузка определенных элементов в PLC 201 и, соответственно, интерпретатор 204. Например, для мельниц такие элементы могут включать 5 категорий: двигатели, клапаны, заслонки, датчики и исполнительные механизмы. Однако также возможна и любая другая категоризация; и (iii) Объединение элементов в блоки. Таким образом, можно собрать машины, последовательности или любую другую группу элементов. Внутреннее соединение в группе будет определяться с помощью системы 10 управления процессом. Сгенерированное соединение можно рассматривать как маску, посредством которой взаимодействие в группе может быть сгенерировано с помощью логических (булевых) операторов и временных интервалов, например, в виде U1=e1 И e2 И e3 ИЛИ e4 И e5. Таким образом, группа является определяемой и ею можно управлять как модулем PLC 201;
На фиг. 6 показано, как вышеописанные выражения и чертежи могут быть обработаны блоком 12 диспетчерского управления и сбора данных или пользователем с помощью HMI блока 12 диспетчерского управления и сбора данных; (iv) На следующем этапе определяют, как группы или блоки взаимодействуют друг с другом. Это также называют потоком. Последние вышеуказанные отношения определяют всю работу установки 30. Хотя управление элементами в группе или блоке, т. е. взаимосвязанных элементов 32 с операционными блоками 31, выполняют в PLC 201, управление группами или блоками происходит на ПК и в системе 10 управления процессом. Определение отношений в потоке также выполняют посредством системы 10 управления процессом с помощью операторов, адаптированных к техническим требованиям автоматизации установки 30. Таким образом, линия потока может быть определена таким же образом, как и группа, например L1=(U1 И U2 И U3) ИЛИ (U4 И U5). Это выражение определяет взаимную корреляцию блоков; (v) И те, и другие будут переведены с помощью интерпретатора 204 в исполняемые команды, которые понятны для всех PLC 201. Специфические у различных производителей требования интерпретируют с помощью интерпретатора 204, используя библиотеку 7, содержащую соответствующие объекты с логическим управлением и структурами управления потоком, и т. д. Таким образом, можно осуществлять обмен данными со всеми используемыми платформами PLC посредством системы согласно настоящему изобретению без необходимости в применении специализированной технологической информации конкретных производителей или т. п. Коррекция представления, преобразования и интерпретации структурного языка и команд, используемых системой 10 управления процессом, скрывают любое представление команды, относящееся к конкретному производителю, причем ее используют для правильного управления и адресации в любых PLC 201; (vi) Весь обмен данными основан на структуре платформы OPC UA, которая позволяет передавать структурированные данные на все уровни. Однако без взаимодействия интерпретатора 204 и объектов библиотеки 7 транспортируемые с применением OPC UA структурированные данные не могут быть использованы для управления PLC 201.
Механизм 11 обработки установки включает блок-конструктор 14 с библиотекой 141 выбираемых записей 142 команд управления процессом для каждого типа системы 20 управления установкой, управляемой независимой системой 10 управления процессом. Работой соответствующей установки управляют с помощью команды управления процессом, присвоенной конкретному типу системы 20 управления установкой с помощью выбираемых записей команд управления процессом. Механизм 11 обработки установки включает блок 15 связывания и внедрения объектов для управления процессом. Выбираемые из библиотеки 141 команды управления процессом преобразуют с помощью блока 15 связывания и внедрения объектов для управления процессом в основные команды программируемого логического контроллера 201/PLC и/или операции, интегрированные во все программируемые логические контроллеры 201/PLC доступной системы 20 управления установкой. В качестве варианта осуществления блок 12 диспетчерского управления и сбора данных функционально связан с системой 20 управления установкой посредством архитектуры OPC-UA на базе открытого стандарта, расширяющей оперативную совместимость блока 15 связывания и внедрения объектов для управления процессом с системами 20 управления установкой и независимой системой 10 управления процессом. В качестве дополнительного варианта осуществления программируемый логический контроллер 201/PLC блока 12 диспетчерского управления и сбора данных включает программируемый логический контроллер 202/PLC (так называемый программный PLC), соединенный с системой 20 управления установкой посредством архитектуры OPC-UA на базе открытого стандарта, расширяющей оперативную совместимость блока 15 связывания и внедрения объектов для управления процессом с защищенными системами 20 управления установкой и клиентским устройством 10. В этом случае для обеспечения комплексного группового управления для управления установкой блок 202 программного PLC добавляют в систему 10 адаптивного управления процессом, как показано на фиг. 2. Номером 151 позиции на фиг. 2 обозначен связанный блок связывания и внедрения объектов для управления процессом, например, также основанный на OPC UA, который позволяет обрабатывать и передавать структурированные данные с уровня PLC на уровень ПК системы 10 адаптивного управления процессом для блока 202 программного PLC.
Блок 15 связывания и внедрения объектов для управления обеспечивает стандартный интерфейс, который позволяет компьютерным программам взаимодействовать с промышленными аппаратными устройствами. Он может быть реализован, например, на основе известного стандарта OLE (связывания и внедрения объектов) для управления процессом. Поскольку стандартный OLE основан на стандарте Windows COM (объектная модель программных компонентов), OPC по существу представляет собой COM. Что касается сети, OPC основан на DCOM (распределеная объектная модель программных компонентов), который фактически не предназначен для промышленного применения в реальном времени и может быть оставлен без внимания в пользу туннелирования OPC. В соответствии с настоящим изобретением блок 15 связывания и внедрения объектов для управления процессом, например, интерфейс OPC, может быть реализован в виде пар сервер/клиент системы 10 адаптивного управления процессом и PLC 201 системы 20 управления установкой, управляющей работой операционных блоков 31 установки. Таким образом, система 10 адаптивного управления процессом в виде OPC-сервера преобразует протокол аппаратной связи, используемый PLC 201, в протокол OPC. OPC-клиент представляет собой любой исполняемый код, требуемый для подключения к аппаратным средствам, таким как система 10 адаптивного управления процессом или HMI (человеко-машинный интерфейс ) системы 10 адаптивного управления процессом. OPC-клиент использует OPC-сервер для получения данных от аппаратных средств или отправки команд на аппаратные средства. Поскольку в блоке 15 связывания и внедрения объектов для управления процессом, основанном на OPC, использован открытый стандарт, настоящее изобретение имеет то преимущество, что оно позволяет снизить затраты для производителей и предложить больше возможностей для пользователей. Согласно настоящему изобретению обеспечивают только один OPC-сервер посредством блока 15 связывания и внедрения объектов для управления процессом в сочетании с обладающими признаками изобретения командами управления процессом, выбираемыми из библиотеки 141 для создания универсальной системы управления установкой, включающей любой OPC-клиент. Таким образом, блок 15 связывания и внедрения объектов для управления процессом реализуют как OPC DataHub, который однозначно обеспечивает решение всех этих задач, т. е. позволяет соединить OPC-сервер и OPC-клиент. В качестве варианта осуществления блок 15 связывания и внедрения объектов для управления процессом способен поддерживать множество соединений. Таким образом, он может одновременно обеспечивать несколько OPC-серверов для OPC-агрегирования и OPC-запараллеливания. Два OPC DataHubs способны зеркально отображать данные в сети TCP для обеспечения OPC-туннелирования.
Блок-конструктор 14 установки с библиотекой 141 выбираемых записей команд управления процессом для каждого типа системы 20 управления установкой может, например, содержать унифицированный интерфейс 143 программирования, причем функционирование соответствующей установки программируют и управляют ею с использованием команд языка программирования более высокого уровня посредством унифицированного интерфейса 143 программирования, и команды языка программирования более высокого уровня преобразуют с помощью унифицированного интерфейса 143 программирования в команды управления процессом из выбираемых записей библиотеки 141. Указанные команды языка программирования более высокого уровня могут, например, содержать межплатформенные, объектно-ориентированные команды программирования. Указанные межплатформенные, объектно-ориентированные команды программирования могут, например, быть реализованы в виде JAVA- и/или JavaScript- и/или XML-команд. Последний вариант осуществления позволяет осуществлять более простое программирование обработки в системе 10 адаптивного независимого управления процессом с использованием команд общеизвестного языка программирования более высокого уровня посредством унифицированного интерфейса 143 программирования.
Блок-конструктор 14 установки предназначен для разработки любого клиентского заказа и позволяет создать решение по автоматизации в соответствии с заказной спецификацией. Этапы проектирования генерируют с помощью блока-конструктора 14 установки таким образом, чтобы минимизировать время проектирования. Работа блока-конструктора 14 установки может включать три этапа. На первом этапе инженер создает технологическую схему на основе библиотеки, которая включает блоки и позволяет сконфигурировать их. На следующем этапе программируют управление блоками в удобном инструменте многоступенчатого программирования. И наконец, выполняют параметризацию и конфигурируют визуальные данные. Для обеспечения создания процесса блок-конструктор 14 установки может быть реализован с использованием JavaScript-программы. В частности, система 10 адаптивного независимого управления процессом может содержать адаптируемый человеко-машинный интерфейс 16, причем обеспечена возможность доступа к блоку 12 диспетчерского управления и сбора данных, блоку-конструктору 14 установки и блоку 13 контроллера установки посредством адаптируемого человеко-машинного интерфейса 16 . Блок 12 диспетчерского управления и сбора данных может быть функционально подключен для формирования устройства обработки, которое должно быть установлено в линию между системой 20 управления установкой и системой 10 управления процессом. Кроме того, клиентское устройство 17 может быть подключено к системе 20 управления установкой, причем клиентское устройство 17 содержит адаптируемый человеко-машинный интерфейс 16 . Блок 12 диспетчерского управления и сбора данных управляет защищенной передачей структурированных данных между системой 20 управления установкой и уровнем 101 клиентского устройства (клиентского устройства 17), доступным посредством блока 12 диспетчерского управления и сбора данных. Структурированные данные обрабатывают и анализируют с помощью блока 12 диспетчерского управления и сбора данных. Кроме того, блок 13 контроллера установки может быть подключен через блок 12 диспетчерского управления и сбора данных к программируемому логическому контроллеру 201/PLC системы 20 управления установкой и им могут управлять посредством адаптируемого человеко-машинного интерфейса 17, причем операционными блоками 31 управляют с помощью программируемого логического контроллера 201/PLC и множества взаимосвязанных элементов 32.
В этом варианте осуществления блок-конструктор 14 установки может содержать библиотеку 144 выбираемых графических пиктограмм 145, причем выбираемая графическая пиктограмма 145 соответствует операционному блоку 31 установки 30. Библиотека 144 доступна посредством адаптируемого человеко-машинного интерфейса 17 . Выбираемые графические пиктограммы 145 выполнены с возможностью упорядочивания с помощью адаптируемого человеко-машинного интерфейса 11 на модифицируемой панели 111 потока управления адаптируемого человеко-машинного интерфейса 11, причем операционные блоки 31 конфигурируют с помощью графических пиктограмм 142 посредством настраиваемых полей 143 ввода/вывода, связанных с элементами 32 операционного блока 31, и обеспечена возможность параметризирования их работы с помощью настраиваемых полей 143 ввода/вывода. Обеспечена возможность привязки выбираемых графических пиктограмм 145 панели 111 потока управления с помощью выбираемых объектов 146 многоступенчатого программирования для создания адаптируемого интерфейса с соответствующей системой 20 управления установкой для управления этой системой 20 управления установкой посредством выбираемых записей 142 команд управления процессом. Выбираемые объекты 146 многоступенчатого программирования могут быть реализованы в виде указанных выбираемых записей 142 команд управления процессом. Адаптируемый человеко-машинный интерфейс 17 может содержать отслеживающие объекты, динамически отслеживающие и указывающие параметры схемы работы установки 30. И наконец, обеспечена возможность доступа к работе установки 30 и ее корректировки путем взаимодействия с отслеживающими объектами адаптируемого человеко-машинного интерфейса 17 .
В заключение следует упомянуть, что дальнейшее сокращение времени проектирования может быть достигнуто за счет многоступенчатого программирования для управления. Для взаимодействия может быть использован соответствующий конструкторский инструментарий, предлагаемый поставщиками PLC. Логика взаимодействия может быть разделена. Более широкими функциональными возможностями управляют с помощью, соответственно, системы 10 адаптивного управления процессом или соответствующего ПК. Простое индивидуализированное решение также может быть получено путем разделения функциональности на основные функциональные возможности и дополнительные функциональные возможности. Дополнительные функциональные возможности могут, например, быть адаптированы к региональным потребностям и потребностям различных подразделений компании. Основные функциональные возможности, включая один дополнительный блок, могут быть легко разработаны в рамках обладающей признаками изобретения системы 10 адаптивного управления процессом.
Перечень ссылок
10 Система управления процессом
11 Механизм обработки установки
12 Блок диспетчерского управления и сбора данных
13 Блок контроллера установки
14 Блок-конструктор установки
141 Библиотека с выбираемыми записями команд управления процессом
142 Записи команд управления процессом
15 Блок связывания и внедрения объектов для управления процессом
151 Клиент OPC UA
152 Сервер OPC UA
153 OPC UA для программного PLC
16 Сетевой интерфейс системы управления процессом
20 Система управления установкой
201 Программируемые логические контроллеры (PLC)
202 Сетевой интерфейс системы управления установкой
203 Клиент OPC UA
204 Интерпретатор
205 Программный PLC
30 Установка
31 операционные блоки
32 Взаимосвязанные элементы
41 Сеть передачи данных/Сеть OPC UA
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ УСТАНОВКИ В СЕТИ "МАШИНА-МАШИНА" НА ОСНОВЕ OPC-UA | 2015 |
|
RU2674758C1 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННОЙ И/ИЛИ РАСПРЕДЕЛИТЕЛЬНОЙ ЛИНИЯМИ | 2017 |
|
RU2743517C2 |
| РАСПРЕДЕЛЕННАЯ ВСТРОЕННАЯ СИСТЕМА УПРАВЛЕНИЯ ДАННЫМИ И ЗНАНИЯМИ, ИНТЕГРИРОВАННАЯ С АРХИВОМ ДАННЫХ ПЛК | 2015 |
|
RU2701845C1 |
| ЗЕРНОВАЯ МЕЛЬНИЦА И ВАЛЬЦЕВЫЙ СТАНОК, ИМЕЮЩИЙ НЕСКОЛЬКО ПРОХОДОВ РАЗМОЛА ДЛЯ ОПТИМИЗИРОВАННОГО РАЗМОЛА РАЗМАЛЫВАЕМОГО МАТЕРИАЛА, А ТАКЖЕ СООТВЕТСТВУЮЩИЙ СПОСОБ | 2019 |
|
RU2757420C1 |
| СПОСОБ ДЛЯ РАЗМЕЩЕНИЯ РАБОЧИХ НАГРУЗОК В ПРОГРАММНО-ОПРЕДЕЛЯЕМОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ | 2016 |
|
RU2730534C2 |
| ПРОГРАММНО-ОПРЕДЕЛЯЕМАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА И АРХИТЕКТУРА | 2016 |
|
RU2729885C2 |
| ЦЕНТРАЛИЗОВАННОЕ УПРАВЛЕНИЕ ПРОГРАММНО-ОПРЕДЕЛЯЕМОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМОЙ | 2016 |
|
RU2747966C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДОСТАВЛЕНИЯ ПРОКСИ-УСЛУГИ В ПРОМЫШЛЕННОЙ СИСТЕМЕ | 2017 |
|
RU2744562C2 |
| Способ и система для контроля состояния группы установок | 2013 |
|
RU2636095C2 |
| СИСТЕМА И СПОСОБ ДЛЯ СЕТИ АВТОМАТИЗИРОВАННОГО БУРЕНИЯ | 2018 |
|
RU2780964C2 |
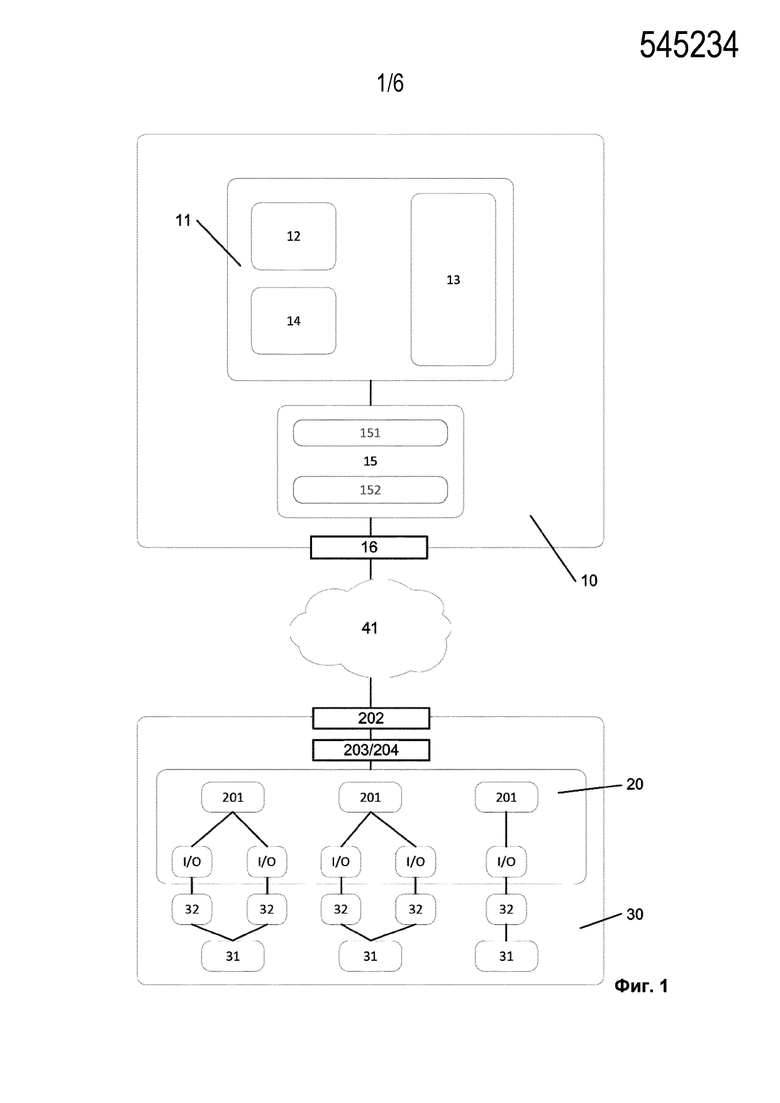
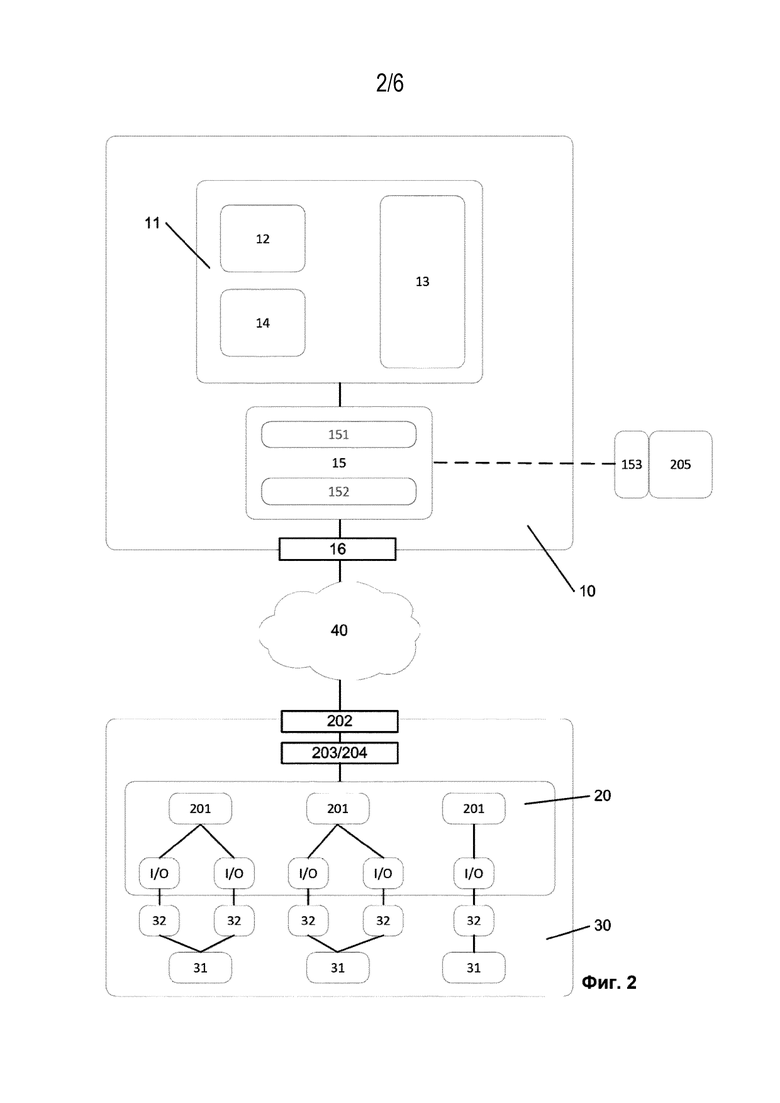
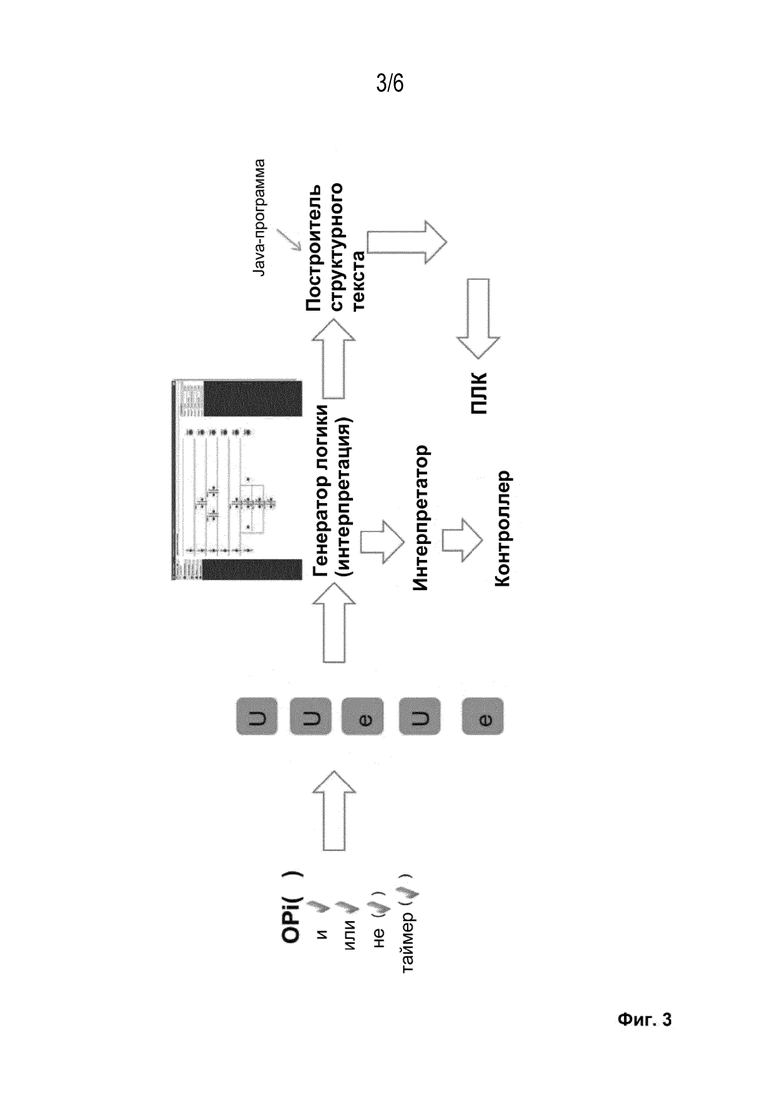
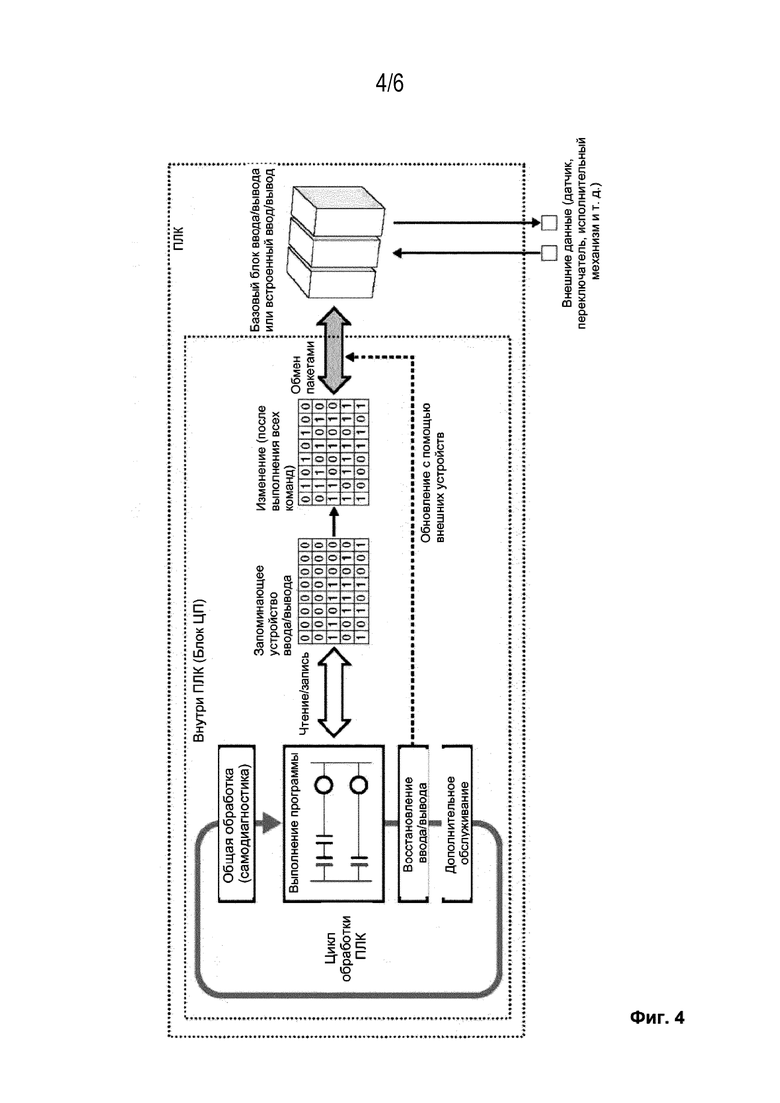

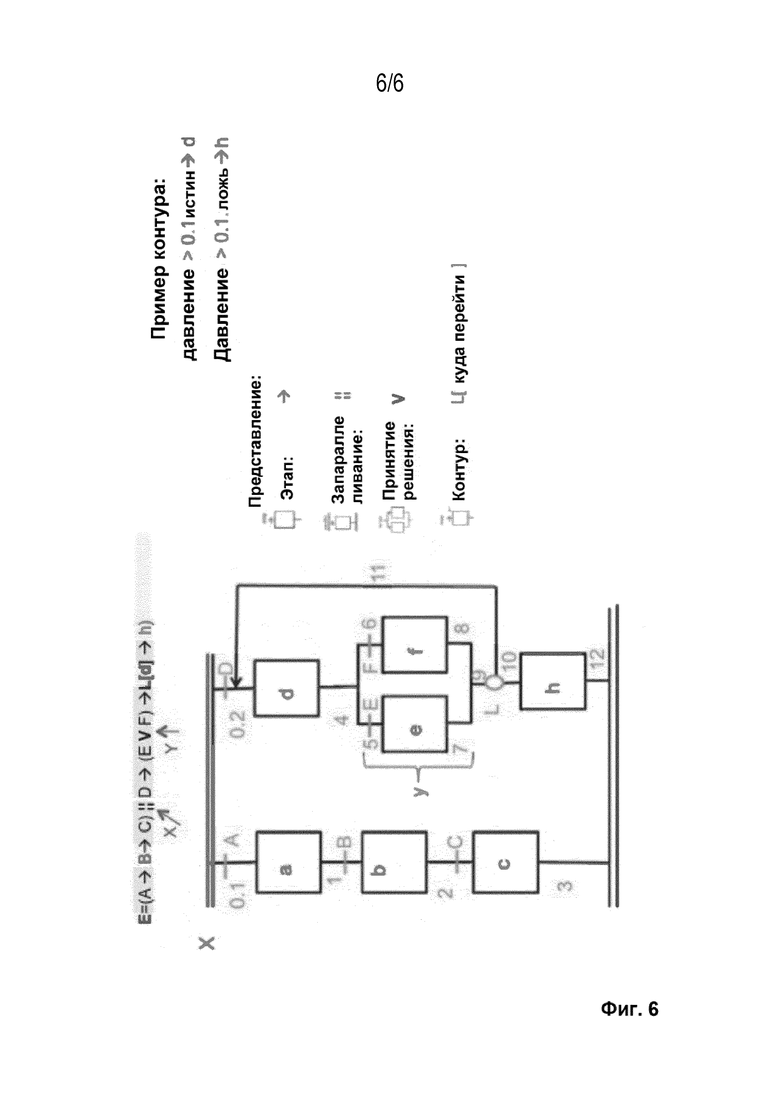
Изобретение относится к области компьютерного управления технологическими процессами, а именно к адаптивному управления процессом для независимого управления системами управления установкой. Технический результат заключается в обеспечении независимой от платформы системы для обеспечения управления установкой, регулирования, в частности стандартного независимого дистанционного управления и автоматизации. Для этого установка (30), связанная с системой (20) управления установкой, содержит множество взаимосвязанных элементов (32) одного или более операционных блоков (31) установки (30), которыми управляют с помощью системы (20) управления установкой посредством элементов (32), соединенных с системой (20) управления установкой, причем система (10) адаптивного независимого управления установкой доступна посредством механизма (11) обработки установки, содержащего блок (13) контроллера установки, подключенный через блок (12) диспетчерского управления и сбора данных к по меньшей мере одному программируемому логическому контроллеру (201/PLC) системы (20) управления установкой. Работой установки (30) и операционных блоков (31) управляют с помощью программируемого логического контроллера (201/PLC) и множества взаимосвязанных элементов (32). 11 з.п. ф-лы, 6 ил.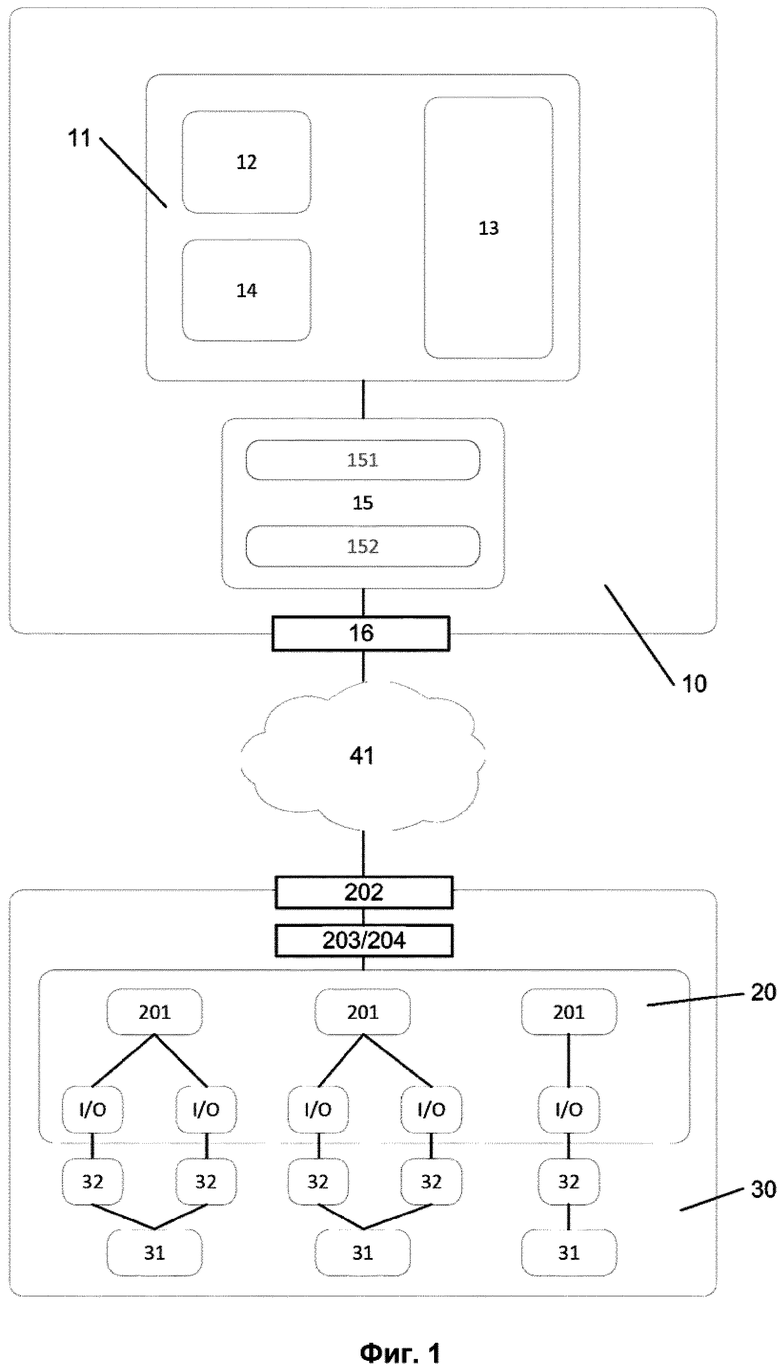
1. Система (10) адаптивного управления процессом для независимого управления системами (20) управления установками, в которой установка (30), связанная с системой (20) управления установкой, содержит множество взаимосвязанных элементов (32) одного или более операционных блоков (31) установки (30), причем система (20) управления установкой посредством элементов (32), соединенных с системой (20) управления установкой, управляет работой операционного блока (31) и причем
обеспечена возможность доступа к системе (20) управления установкой посредством системы (10) адаптивного независимого управления процессом по сети (41) «машина-машина» (M2M),
отличающаяся тем, что
механизм (11) обработки установки системы (10) адаптивного независимого управления процессом содержит блок (13) контроллера установки, соединенный посредством сетевых интерфейсов (16/202) по меньшей мере с одним программируемым логическим контроллером (201/PLC) системы (20) управления установкой, причем работа установки (30) и операционных блоков (31) управляется с помощью программируемого логического контроллера (201/PLC) и множества взаимосвязанных элементов (32) посредством блока (12) диспетчерского управления и сбора данных,
механизм (11) обработки установки содержит блок-конструктор (14) установки с библиотекой (141) выбираемых записей (142) команд управления процессом для каждого типа системы (20) управления установкой, управляемой с помощью независимой системы (10) управления процессом, причем обеспечена возможность управления работой соответствующей установки (30) с помощью команд управления процессом, присвоенных конкретному типу системы (20) управления установкой посредством выбираемых записей команд управления процессом, и причем обеспечена возможность управления и регулирования работы установки (30) с помощью блока (12) диспетчерского управления и сбора данных, и
механизм (11) обработки установки содержит блок (15) связывания и внедрения объектов для управления процессом, причем выбираемые команды управления процессом библиотеки (141) преобразуются с помощью блока (15) связывания и внедрения объектов для управления процессом в основные команды программируемого логического контроллера (201/PLC) и/или операции, интегрированные во все программируемые логические контроллеры (201/PLC) доступной системы (20) управления установкой.
2. Система (10) адаптивного независимого управления процессом по п. 1, отличающаяся тем, что блок (12) диспетчерского управления и сбора данных функционально связан с системой (20) управления установкой с помощью архитектуры OPC-UA на базе открытого стандарта, расширяющей оперативную совместимость блока (15) связывания и внедрения объектов для управления процессом с системами (20) управления установкой и системой (10) независимого управления процессом, причем интерпретатор (204) преобразует протокол OPC-UA в передаваемые команды PLC и обращения к соответствующему PLC 201.
3. Система (10) адаптивного независимого управления процессом по п. 1 или 2, отличающаяся тем, что программируемый логический контроллер (201/PLC) блока (12) диспетчерского управления и сбора данных содержит программируемый логический контроллер (202/PLC), соединенный с системой (20) управления установкой с помощью архитектуры OPC-UA на базе открытого стандарта, расширяющей оперативную совместимость блока (15) связывания и внедрения объектов для управления процессом с защищенными системами (20) управления установкой и клиентским устройством (10).
4. Система (10) адаптивного независимого управления процессом по одному из пп. 1-3, отличающаяся тем, что блок-конструктор (14) установки с библиотекой (141) выбираемых записей команд управления процессом для каждого типа системы (20) управления установкой содержит унифицированный интерфейс (143) программирования, причем обеспечена возможность программирования и управления работой соответствующей установки с использованием команд языка программирования более высокого уровня посредством унифицированного интерфейса (143) программирования, и причем команды языка программирования более высокого уровня преобразуются с помощью унифицированного интерфейса (143) программирования в команды управления процессом из выбираемых записей библиотеки (141).
5. Система (10) адаптивного независимого управления процессом по п. 4, отличающаяся тем, что команды языка программирования более высокого уровня содержат межплатформенные, объектно-ориентированные команды программирования.
6. Система (10) адаптивного независимого управления процессом по п. 5, отличающаяся тем, что межплатформенные, объектно-ориентированные команды программирования реализованы в виде JAVA- и/или JavaScript- и/или XML-команд.
7. Система (10) адаптивного независимого управления процессом по одному из пп. 1-6, отличающаяся тем, что система (10) адаптивного независимого управления процессом содержит адаптируемый человеко-машинный интерфейс (16), причем обеспечена возможность доступа к блоку (12) диспетчерского управления и сбора данных, блоку-конструктору (14) установки и блоку (13) контроллера установки посредством адаптируемого человеко-машинного интерфейса (16), и причем блок (12) диспетчерского управления и сбора данных функционально подключен для формирования устройства обработки, которое необходимо установить в линию между системой (20) управления установкой и клиентским устройством (17), подключенным к системе (20) управления установкой, причем клиентское устройство (17) содержит адаптируемый человеко-машинный интерфейс (16), причем блок (12) управления и сбора данных управляет защищенной передачей структурированных данных между системой (20) управления установкой и уровнем (101) клиентского устройства (17), доступным с помощью блока (12) диспетчерского управления и сбора данных, и причем обеспечена возможность обработки и анализа структурированных данных с помощью блока (12) диспетчерского управления и сбора данных.
8. Система (10) адаптивного независимого управления процессом по п. 7, отличающаяся тем, что блоком (13) контроллера установки, подключенным через блок (12) диспетчерского управления и сбора данных к программируемому логическому контроллеру (201/PLC) системы (20) управления установкой, управляют посредством адаптируемого человеко-машинного интерфейса (17), причем операционными блоками (31) управляют с помощью программируемого логического контроллера (201/PLC) и множества взаимосвязанных элементов (32).
9. Система (10) адаптивного независимого управления процессом по п. 7 или 8, отличающаяся тем, что блок-конструктор (14) установки содержит библиотеку (144) выбираемых графических пиктограмм (145), причем библиотека (144) доступна с помощью адаптируемого человеко-машинного интерфейса (17), и причем выбираемая графическая пиктограмма (145) соответствует операционному блоку (31) установки (30), причем выбираемые графические пиктограммы (145) выполнены с возможностью упорядочивания с помощью адаптируемого человеко-машинного интерфейса (11) на модифицируемой панели (111) потока управления адаптируемого человеко-машинного интерфейса (11), причем
операционные блоки (31) выполнены с возможностью конфигурирования с помощью графических пиктограмм (142) посредством настраиваемых полей (143) ввода/вывода, связанных с элементами (32) операционного блока (31), и обеспечена возможность параметризирования работы с помощью настраиваемых полей (143) ввода/вывода, и причем
обеспечена возможность привязки выбираемых графических пиктограмм (145) панели (111) потока управления с помощью выбираемых объектов (146) многоступенчатого программирования для создания адаптируемого интерфейса с соответствующей системой (20) управления установкой для управления системой (20) управления установкой посредством выбираемых записей (142) команд управления процессом.
10. Система (10) адаптивного независимого управления процессом по одному из пп. 7-9, отличающаяся тем, что выбираемые объекты (146) многоступенчатого программирования реализованы в виде упомянутых выбираемых записей (142) команд управления процессом.
11. Система (10) адаптивного независимого управления процессом по одному из пп. 7-10, отличающаяся тем, что адаптируемый человеко-машинный интерфейс (17) содержит отслеживающие объекты, динамически отслеживающие и указывающие параметры схемы работы установки (30).
12. Система (10) адаптивного независимого управления процессом по одному из пп. 7-11, отличающаяся тем, что обеспечена возможность доступа к работе установки (30) и ее корректировке путем взаимодействия с отслеживающими объектами адаптируемого человеко-машинного интерфейса (17).
| Колосоуборка | 1923 |
|
SU2009A1 |
| Камертонный преобразователь с контактным возбуждением | 1952 |
|
SU98261A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Без балансовый стрелочный перевод | 1927 |
|
SU7346A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

